matlab混沌算法
用MATLAB实现基于混沌的图像置乱加密算法
用MATLAB实现基于混沌的图像置乱加密算法由于图像文件的加密有其自身的要求,传统的文字加密方法不适合图像文件加密。
为此,我们在混沌映射加密算法的基础上,提出了一种利用Logistic混沌序列对图像像素点置乱实现加密的算法,那么,我们今天借助MATLAB软件平台,看看基于混沌的图像置乱加密算法如何实现。
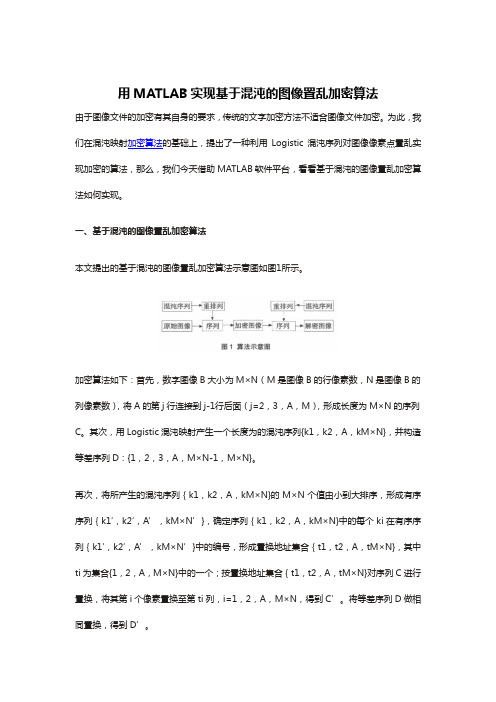
一、基于混沌的图像置乱加密算法本文提出的基于混沌的图像置乱加密算法示意图如图1所示。
加密算法如下:首先,数字图像B大小为M×N(M是图像B的行像素数,N是图像B的列像素数),将A的第j行连接到j-1行后面(j=2,3,A,M),形成长度为M×N的序列C。
其次,用Logistic混沌映射产生一个长度为的混沌序列{k1,k2,A,kM×N},并构造等差序列D:{1,2,3,A,M×N-1,M×N}。
再次,将所产生的混沌序列{k1,k2,A,kM×N}的M×N个值由小到大排序,形成有序序列{k1′,k2′,A’,kM×N’},确定序列{k1,k2,A,kM×N}中的每个ki在有序序列{k1′,k2′,A’,kM×N’}中的编号,形成置换地址集合{t1,t2,A,tM×N},其中ti为集合{1,2,A,M×N}中的一个;按置换地址集合{t1,t2,A,tM×N}对序列C进行置换,将其第i个像素置换至第ti列,i=1,2,A,M×N,得到C’。
将等差序列D做相同置换,得到D’。
最后,B’是一个M×N的矩阵,B’(i ,j)=C’((i-1)×M+j),其中i=1,2,A,M;j=i=1,2,A,N,则B’就是加密后的图像文件。
解密算法与加密算法相似,不同之处在于第3步中,以序列C’代替随机序列{k1,k2,A,kM×N},即可实现图像的解密。
混沌映射MATLAB仿真
混沌映射(序列)matlab算法“小全”:Logistic、Henon、帐篷、kent(含混沌二值图像生成函数)1.Logistic(罗切斯特)映射变换核:x n+1=ax n(1−x n)绘图程序:n=64;key=0.512;an=linspace(3.1,3.99,400);holdon;boxon;axis([min(an),max(an),-1,2]);N=n^2;xn=zeros(1,N);for a=an;x=key;for k=1:20;x=a*x*(1-x);%产生公式end;for k=1:N;x=a*x*(1-x);xn(k)=x;b(k,1)=x;%一维矩阵记录迭代结果end;plot(a*ones(1,N),xn,'k.','markersize',1);end;%figure;%imhist(b)实用混沌加密函数:functionichao_ans=ichaos_logistic(varargin)%logistic序列生成算法%函数名:%logistic混沌序列生成函数%参数:%(n,key),n为矩阵阶数,key为迭代初始值。
%(n),n为矩阵阶数,key=0.600。
%()或(n,key,...),n=64,key=0.600。
Switch nargin;case1;n=varargin{1};key=0.600;case2;n=varargin{1};key=varargin{2};otherwisekey=0.600;n=64;endN=n^2;xn=zeros(1,N);a=4;x=key;for k=1:20;x=a*x*(1-x);%产生公式end;for k=1:N;x=a*x*(1-x);xn(k)=x;%一维矩阵记录迭代结果end;c=reshape(xn,n,n);%一维矩阵转换二维矩阵d=zeros(n,n);%二维混沌矩阵调制For a1=1:n;For a2=1:n;ifc(a1,a2)>=0.5;d(a1,a2)=1;else d(a1,a2)=0;end;end;end;%figure;title('logistic映射');%imshow(d);ichao_ans=d;2.Henon(埃农)映射+1=yn+1−ax变换核:{xynn2n+1=bxn绘图程序:a∈(0,1.4)0.2<b≤0.314b=0.3;N=400;an=ones(1,N);xn=zeros(1,N);hold on;boxon;x=0;y=0;for a=0:0.001:1.4for k=1:N;xm=x;ym=y;x=ym+1-a*xm.*xm;y=b*xm;endxn(1)=x;for n=2:N;xm=x;ym=y;x=ym+1-a*xm.*xm;y=b*xm;xn(n)=x;endplot(an*a,xn,'k.','markersize',1);endxlim([0,a]);实用混沌加密函数:functionichao_ans=ichaos_henon(varargin)%埃农(Henon)映射%0.2<key<0.314;理想范围(0.25—0.314)。
matlab混沌,分形

matlab混沌,分形对于函数f(x)=λsin(πx),λ∈(0,1],使⽤matlab计算随着λ逐渐增⼤,迭代x=f(x)的值,代码如下:function y=diedai(f,a,x1)N=32;y=zeros(N,1);for i=1:1e4x2=f(a,x1);x1=x2;y(mod(i,N)+1)=x2;endend%f=@(a,x)a*x*(1-x);f=@(a,x)a*sin(pi*x);%x0=0.1;hold on;for x0=-1:0.05:1for a=0:0.01:1y=diedai(f,a,x0);for count=1:32plot(a,y(count),'k.');hold on;endendend得到的图像如下:其中横轴为λ,纵轴为x可以看到随着λ的逐渐增⼤,出现了倍周期分叉的情况。
由图中可以看出第⼀个分叉值⼤约在0.3附近,第⼆个在0.73到0.75之间,第三个在0.8到0.85之间,混沌⼤约出现在0.86附近。
接下来编写代码计算分叉值,代码如下:format long;x0=0.1;for a=0.3182:0.0000001:0.3183y=diedai(f,a,x0);if max(y)>0.001disp(a);break;endend得到第⼀个分叉值⼤约为0.3182298format long;x0=0.1;for a=0.7199:0.000001:0.72y=diedai(f,a,x0);if max(y)-min(y)>0.001disp(a);break;endend得到第⼆个分叉值⼤约为0.719911format long;x0=0.1;for a=0.8332:0.000001:0.8333y=diedai(f,a,x0);if abs(y(32)-y(30))>0.001disp(a);break;endend得到第三个分叉值⼤约为0.833267利⽤Feigenbaum常数估计第三个分叉值,得到0.805939分形图周常青画mandelbrot分形图,主要使⽤了三个函数:iter=mandelbrot1(x0,y0,maxIter),⽤来计算迭代后是否收敛,⽅程z=z2+z0。
基于Matlab的混沌特性分析

基于Matlab的混沌特性分析混沌理论是20世纪60年代提出的一种新的动力学理论,它描述了非线性动力系统中表现出来的复杂、不可预测的行为。
混沌特性分析是利用数学工具和计算机模拟方法来研究混沌系统的行为和性质。
本文将介绍基于Matlab的混沌特性分析方法。
我们需要了解一些混沌系统的基本概念。
混沌系统是指由一组非线性方程描述的动力学系统,它具有以下特点:初值敏感性、确定性、周期倍增、拓扑混沌等。
在Matlab中,我们可以使用ode45函数来求解混沌系统的微分方程。
ode45是一个常用的数值解微分方程的函数,它可以自动选择合适的步长来保证解的准确性。
接下来,我们可以通过绘制混沌系统的相图来观察系统的演化规律。
相图是指在系统的状态空间中表示系统状态随时间变化的图形。
在Matlab中,我们可以使用plot函数来绘制相图。
除了相图,我们还可以使用混沌系统的Poincaré截面来描述系统的性质。
Poincaré截面是指将系统状态变化的轨迹投影到一个特定的平面上,以观察系统状态的聚集情况。
在Matlab中,我们可以使用scatter函数来绘制Poincaré截面。
我们可以通过计算混沌系统的Lyapunov指数来判断系统的混沌程度。
Lyapunov指数是一种用来衡量系统的初值敏感性的指标,它可以反映系统的混沌性质。
在Matlab中,我们可以使用lyapunov函数来计算Lyapunov指数。
基于Matlab的混沌特性分析方法包括求解微分方程、绘制相图、绘制Poincaré截面、绘制分岔图以及计算Lyapunov指数等步骤。
这些方法可以帮助我们进一步了解混沌系统的行为和性质,为混沌系统的应用提供理论依据。
基于Matlab的混沌特性分析

基于Matlab的混沌特性分析混沌现象是指那些看似无序但又具有确定性的系统行为。
混沌特性分析是指对混沌系统进行一系列统计和数学分析的方法,以揭示其内在的规律和动力学特性。
Matlab是一种强大的数值计算软件,具有丰富的功能和工具箱,适于进行混沌特性分析。
下面将介绍基于Matlab的混沌特性分析的一些常用方法。
Matlab可以用来绘制混沌系统的相图和轨迹图。
通过绘制相图,可以观察到混沌系统的轨迹在相空间中的分布和演化规律,从而揭示出系统的吸引子和稳定周期等特性。
可以使用Matlab中的plot函数来绘制相图和轨迹图。
Matlab可以用来计算混沌系统的Lyapunov指数。
Lyapunov指数是衡量系统对初始条件的敏感程度的指标,它可以用来判断系统是否具有混沌特性。
通过计算系统在相空间中相邻轨道的分离率,可以得到Lyapunov指数的估计值。
在Matlab中,可以使用内置的函数lyapunov来计算Lyapunov指数。
Matlab还可以用来分析混沌系统的频谱特性。
混沌系统的频谱通常具有分形结构,即呈现出分形维度的特征。
通过计算系统的功率谱密度和分形维度,可以揭示混沌系统的频谱特性。
可以使用Matlab中的fft函数来计算功率谱密度,并使用fractal函数来计算分形维度。
Matlab还可以用来分析混沌系统的分岔图和吸引子。
分岔图是研究混沌系统的参数变化对系统行为的影响的重要工具,它可以帮助我们了解系统从周期运动向混沌运动转变的过程。
吸引子是描述混沌系统在相空间中的吸引轨道的几何形状,通过分析吸引子的分维和奇异性等特性,可以揭示混沌系统内在的规律。
可以使用Matlab中的bifurcation函数来绘制分岔图,并使用attractor函数来绘制吸引子。
基于Matlab的混沌特性分析可以帮助我们揭示混沌系统的规律和动力学特性。
通过绘制相图和轨迹图、计算Lyapunov指数、分析频谱特性、绘制分岔图和吸引子等,可以全面而深入地了解混沌系统的行为。
混沌信号的产生 matlab
混沌信号的产生及其在Matlab中的实现一、混沌信号的概念与特点混沌是一种在确定性系统中表现出的随机、不可预测的行为。
混沌系统具有以下几个显著特征:1. 灵敏依赖于初值:在混沌系统中,微小的初值变化会导致系统行为的巨大变化,这就是所谓的“蝴蝶效应”。
2. 随机性和周期性:混沌系统表现出随机性和周期性的叠加,使得系统的行为呈现出复杂的、看似无序的特征。
3. 分形结构:混沌系统的轨迹具有分形结构,表现出自相似性和自组织性。
二、混沌信号的产生原理混沌信号的产生通常基于非线性动力系统模型,其中最经典的混沌系统包括 Logistic 映射、Henon 映射等。
混沌信号的产生一般遵循以下步骤:1. 选择合适的混沌系统模型,比如 Logistic 映射:$x_{n+1} =rx_n(1-x_n)$。
2. 选择初值和模型参数,并设定迭代次数。
3. 进行迭代计算,得到混沌信号的时域序列。
三、Matlab 中的混沌信号生成Matlab 是一种强大的科学计算软件,提供了丰富的工具箱和函数,使得混沌信号的产生和分析变得非常简单。
在Matlab 中,可以通过以下几种方法产生混沌信号:1. 直接求解微分方程:利用ode45函数求解混沌系统的微分方程,得到混沌时域序列。
2. 迭代计算:利用for循环结构进行模型的迭代计算,得到混沌信号的时域序列。
3. 利用现成的工具箱:Matlab 提供了一些专门用于产生混沌信号的工具箱,比如 ChaosBox。
四、示例代码以下是一个利用 Logistic 映射产生混沌信号的示例代码:```matlabLogistic 映射参数r = 3.9;时域序列长度N = 1000;初值x0 = 0.1;初始化时域序列x = zeros(1, N);x(1) = x0;迭代计算for i = 1:N-1x(i+1) = r * x(i) * (1 - x(i));end绘制混沌信号时域图plot(x);xlabel('时域');ylabel('信号幅值');title('Logistic 映射产生的混沌信号');```五、混沌信号的应用混沌信号作为一种具有随机性和周期性的信号,具有广泛的应用价值,包括但不限于:1. 加密通信:混沌信号可用于加密通信系统中的信息传输,利用混沌的随机特性可以提高数据的安全性。
混沌优化算法matlab

混沌优化算法是一种通过利用混沌动态系统的特性来寻找最优解的优化算法。
在MATLAB中,可以使用以下步骤来实现混沌优化算法:1. 定义优化问题的目标函数。
2. 确定变量的边界和初始值。
3. 构建混沌动态系统模型。
可以选择Logistic映射或者其他混沌映射来构建模型。
4. 迭代更新混沌动态系统的状态,直到找到最优解。
以下是一个简单的MATLAB代码示例,用于实现混沌优化算法来求解一个简单的二次函数的最小值:```matlab定义目标函数fun = @(x) x(1)^2 + 3*x(2)^2 - 4*x(1)*x(2) - 5*x(1) - 11*x(2) + 20;确定变量的边界和初始值lb = [-5, -5]; ub = [5, 5];x0 = [0, 0];构建混沌动态系统模型k = 40; 迭代次数mu = 4; 控制参数lambda = log(mu)/k; 李雅普诺夫指数f = @(z) z.^2 - mu.*z + lambda; 混沌映射函数迭代更新混沌动态系统的状态,直到找到最优解x = x0;for i = 1:kz = f(x); 映射到新的状态x = x + z; 更新状态if x(1) < lb(1) || x(1) > ub(1) || x(2) < lb(2) || x(2) > ub(2)break; 越界则停止迭代endend输出最优解disp(['最优解为:[', num2str(x), ']']);disp(['最小值为:', num2str(fun(x))]);```这个例子中,我们使用Logistic映射来构建混沌动态系统模型,并使用控制参数mu=4和迭代次数k=40。
初始值设为x0=[0,0],变量的边界设为lb=[-5, -5]和ub=[5, 5]。
通过迭代更新混沌动态系统的状态,直到找到最优解,并输出最优解和最小值。
Matlab非线性方程与混沌
折了一匹战马,伤了一位骑士;
伤了一位骑士,输了一场战斗;
输了一场战斗,亡了一个帝国。
马蹄铁上一个钉子是否会丢失,本是初始条件的 十分微小的变化,但其“长期”效应却是一个帝 国存与亡的根本差别。 这就是军事和政治领域中的所谓“蝴蝶效应”。
2. 将参数r取0,0.3,0.6,0.9,1.2,…,3.9的迭代序列
收敛情况放置到同一坐标系中观察其变化
程序
clear;clf; hold on axis([0,4,0,1]);grid for r=0:0.3:3.9
x=[0.1]; for k=2:150
x(k)=r*x(k-1)*(1-x(k-1)); end pause(0.05) for k=101:150
混沌学的任务:就是寻求混沌现象的规律,加以 处理和应用。
60年代混沌学的研究热悄然兴起,渗透到物理学、 化学、生物学、生态学、力学、气象学、经济学、 社会学等诸多领域,成为一门新兴学科。
科学家给混沌下的定义是:混沌是指发生在确定性 系统中的貌似随机的不规则运动,一个确定性理论 描述的系统,其行为却表现为不确定性一不可重复、 不可预测,这就是混沌现象。
经典动力学的传统观点认为:系统的长期行为 对初始条件是不敏感的,即初始条件的微小变化 对未来状态所造成的差别也是很微小的。可混沌 理论向传统观点提出了挑战。混沌理论认为在混 沌系统中,初始条件的十分微小的变化经过不断
放大,对其未来状态会造成极其巨大的差别。
一则西方寓言:
丢失一个钉子,坏了一只蹄铁;
end
参数r的微小变化引起结果巨大的变化
请同学们再次加密r取值进行实验,回答 下面问题
(1)是否由4支分叉为8支,并依次类 推呢?
混沌粒子群算法matlab
混沌粒子群算法matlab
混沌粒子群算法matlab是一种基于混沌理论和粒子群算法的优化算法。
在matlab平台上,可以通过编程实现混沌粒子群算法来解决复杂的优化问题。
该算法的基本思想是通过模拟粒子在搜索空间中的移动来寻找最优解,同时加入混沌因素来增强算法的探索性和收敛性。
在实际应用中,混沌粒子群算法matlab已经被广泛应用于图像处理、信号处理、神经网络等领域,具有较高的优化效果和实用性。
需要注意的是,混沌粒子群算法matlab需要根据不同的问题进行参数调整和优化,以达到最优解的目的。
- 1 -。
基于Matlab的混沌特性分析

基于Matlab的混沌特性分析混沌现象是一种非线性动力学现象,其特征是在一定的条件下,系统会表现出无规律、无周期的运动。
这种运动模式具有极高的敏感性,即微小的扰动就可能导致运动轨迹的剧烈变化。
这种特性使混沌现象在生命科学、金融、天气预报等领域都具有重要的应用价值。
针对这种现象,人们已开发出了许多分析技术和计算工具。
其中,基于Matlab的混沌特性分析是一种常用的方法。
Matlab是一种基于矩阵运算的科学计算软件,具有强大的数值计算能力和便捷的可视化工具,可以方便地进行混沌运动的仿真和分析。
下面,我们将介绍基于Matlab的混沌特性分析的具体步骤和方法。
1. 定义混沌系统和初始条件首先,需要定义混沌系统的数学模型和初始条件。
常见的混沌系统包括Lorenz系统、Rössler系统、Chua系统等。
以Lorenz系统为例,其数学模型为:dx/dt = σ(y – x)dy/dt = x(ρ – z) – ydz/dt = xy –βz其中,σ、ρ、β为系统的参数,x、y、z为系统的状态变量。
定义好参数和初始条件后,即可利用Matlab进行数值计算。
2. 进行数值求解和仿真利用Matlab的ode45函数进行数值求解,并对结果进行仿真。
这里我们可以使用Matlab的绘图命令如plot、scatter等对系统的运动轨迹、吸引子轨道、相图等进行可视化展示。
3. 计算系统的混沌特征指标对混沌系统进行指标计算是分析混沌现象的重要方法。
根据Lyapunov指数、Hurst指数、分形维数等指标可以描述混沌系统的非线性特性、长期记忆特性和空间分布特性等。
这里以Lyapunov指数为例,Lyapunov指数用于描述非线性系统的稳定性,其数学定义为沿着轨道方向的指数增长率。
在Matlab中,可以使用Lyap函数进行计算,其计算结果可以用于描述系统是否混沌以及混沌程度。
对于具有较高的Lyapunov指数系统,其运动轨迹中存在大的剧烈抖动或明显的周期性分量。
matlab混沌算法
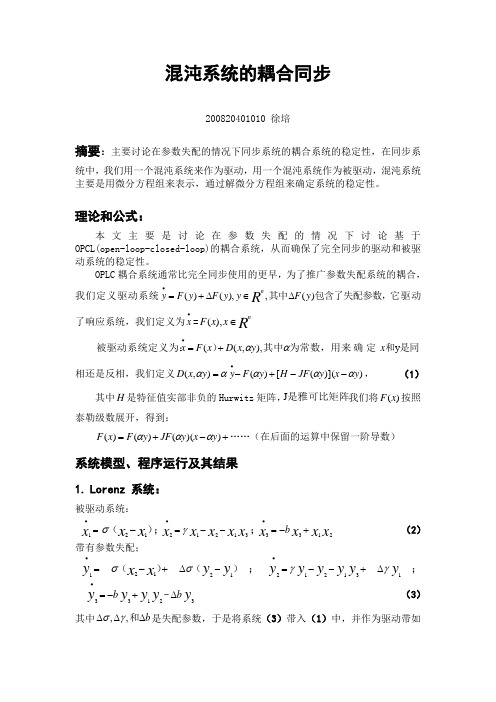
混沌系统的耦合同步200820401010 徐培摘要:主要讨论在参数失配的情况下同步系统的耦合系统的稳定性,在同步系统中,我们用一个混沌系统来作为驱动,用一个混沌系统作为被驱动,混沌系统主要是用微分方程组来表示,通过解微分方程组来确定系统的稳定性。
理论和公式:本文主要是讨论在参数失配的情况下讨论基于OPCL(open-loop-closed-loop)的耦合系统,从而确保了完全同步的驱动和被驱动系统的稳定性。
OPLC 耦合系统通常比完全同步使用的更早,为了推广参数失配系统的耦合,我们定义驱动系统包含了失配参数,其中)(,),()(y F y y F y F y R n∆∈∆+=∙它驱动了响应系统,我们定义为∙x =R nx x F ∈),(为常数,用来其中)被驱动系统定义为:αα),,((y x D x F x +=∙确定是同和y x 相还是反相,我们定义))](([)(),(y x y JF H y F y y x D ααααα--+-=∙, (1)其中H 是特征值实部非负的Hurwitz 矩阵,是雅可比矩阵J 我们将)(x F 按照泰勒级数展开,得到:+-+=))(()()(y x y JF y F x F ααα……(在后面的运算中保留一阶导数)系统模型、程序运行及其结果1. Lorenz 系统:被驱动系统:=∙x 1)(x x 12-σ;xx xx x31212--=∙γ;xx x x b 2133+-=∙(2)带有参数失配;=∙y1+-)(x x 12σ)(y y12-∆σ;+--=∙yy yyy31212γy1γ∆;y y yyb2133+-=∙-y b 3∆ (3)其中b ∆∆∆和,,γσ是失配参数,于是将系统(3)带入(1)中,并作为驱动带如入到系统(2)中,得到:=∙x1)(x x 12-σ+)(ξσα/1∆)(y y 12-;))(())(()1(331211313131212yxy py xy pyy xx xxxααααααγ-++-++-+--=∙))(())(()1(221411232132133yxy py xy pyy yxx xxbbααααααα--+--+-+∆-+-=∙其中,我们在运算时,取H=[b ppp p--+-4321;10γσσ;]其中,0,0,14321===-<ppppγ,22,001038或,,,-==∆=∆=∆=∆+ασγγγb ,3/810==b ,σMatlab 程序:建立一个M 文件:function dx=Rossler1(t,x) %x(1) denotes x1 %x(2) denotes x2 %x(3) denotes x3 %x(4) denotes y1 %x(5) denotes y2 %x(6) denotes y3 dx=zeros(6,1); alpha=-2; b=2.666; d_r=0.10; r=28;sigma=10; d_sigma=0; E=1; d_b=0; p1=-29; p2=0; p3=0; p4=0;dx(1)=sigma*(x(2)-x(1))+alpha*d_sigma*(1/E)*(x(5)-x(4));dx(2)=r*x(1)-x(2)-x(1)*x(3)+alpha*d_r*x(4)+alpha*(alpha-1)*x(4)*x(6)+(p1+alpha*x(6))*(x(1)-alpha*x(4))+(p2+alpha*x(4))*(x(3)-alpha*x(6)); dx(3)=-b*x(3)+x(1)*x(2)-alpha*d_b*x(6)+alpha*(1-alpha)*x(4)*x(5)+(p3-alpha*x(4))*(x(1)-alpha*x(4))+(p4-alpha*x(4))*(x(2)-alpha*x(5)); dx(4)=sigma*(x(5)-x(4))+d_sigma*(x(5)-x(4)); dx(5)=r*x(4)-x(5)-x(4)*x(6)+d_r*x(4); dx(6)=-b*x(6)+x(4)*x(5)-d_b*x(6);在命令框中输入:[T,X]=ode45(@Rossler1,[0 200],[1 1 1 1 1 1]);%四阶龙格库塔法解微分方程组plot(T,X(:,3),'b',T,X(:,6),'r'); axis([50 150 -70 50]); 得到图:图1 其中红色部分蓝色部分分别表示的变化情况,相对于时间变量和t 33yx 从图中可以看出y33x 和实现了同步。
Matlab中的分形几何和混沌理论技巧
Matlab中的分形几何和混沌理论技巧随着计算机科学和数学的不断发展,分形几何和混沌理论在许多领域中得到了广泛的应用。
作为一种强大的科学计算工具,Matlab提供了许多实用的技巧,使得分形几何和混沌理论的研究更加简单和高效。
本文将介绍一些在Matlab中使用分形几何和混沌理论的技巧,探索其在数学、物理和工程等领域的应用。
一、分形几何分形几何是一种研究自相似结构和复杂物体的数学理论。
Matlab提供了一系列强大的函数和工具,用于生成和分析分形几何图形。
1. 使用Fractal函数库Matlab中的Fractal函数库提供了许多用于生成各种分形图形的函数。
例如,使用Barnsley函数可以创建分形植物或分形地形图像,使用Mandelbrot函数可以绘制Mandelbrot集合的图像。
这些函数不仅提供了生成图形的算法,还可以通过调整参数来控制图形的细节。
2. 自定义分形函数除了使用现有的函数库,Matlab还允许用户定义自己的分形函数。
通过编写自定义函数,用户可以创建符合特定需求的分形图形。
例如,可以定义一个自相似函数来生成分形树状结构,或者定义一个混沌映射来生成分形图像。
3. 分形几何的应用分形几何在许多领域中具有广泛的应用。
在数学中,分形理论可以用于研究复杂系统和非线性动力学。
在物理学中,分形几何可以解释复杂的自然现象,例如分形天线的电磁波辐射特性。
在工程领域,分形几何可以用于设计具有特定性能的材料结构。
二、混沌理论混沌理论是研究非线性动力学系统中的无序行为的数学理论。
混沌现象具有极高的灵敏度和迅速的演变速度,可以用来描述一些看似随机但又遵循确定性规律的系统。
Matlab提供了一系列用于研究和模拟混沌系统的函数和工具。
1. 混沌映射Matlab中的Chaos函数库提供了许多常见的混沌映射函数,例如Logistic映射、Henon映射和Lorenz映射。
用户可以通过调整参数和初始条件来探索这些混沌映射的行为。
tent混沌映射matlab代码
一、介绍混沌映射混沌映射是一类非线性动力系统的数学模型,其特点是具有极其敏感的初始条件和参数变化,表现出复杂、不可预测的动态行为。
混沌映射广泛应用于密码学、通信、生物学等领域,具有重要的理论和实际价值。
二、混沌映射的基本模型混沌映射的基本模型可以用迭代函数表示,其一般形式为:Xn+1=f(Xn),其中Xn表示第n次迭代的值,f()为映射函数。
常见的混沌映射包括Logistic映射、Henon映射、Lorenz映射等,它们具有不同的动态特性和应用场景。
三、混沌映射在Matlab中的实现在Matlab中,可以利用迭代方法实现混沌映射的计算和可视化。
以下是一个简单的混沌映射的Matlab代码示例:```matlab定义迭代次数n = 1000;定义参数a = 2;b = 0.5;初始化初始值x(1) = 0.1;y(1) = 0.1;迭代计算for i=1:nx(i+1) = y(i) + 1 - a*x(i)^2;y(i+1) = b*x(i);end可视化plot(x, y)xlabel('X')ylabel('Y')title('Henon Map')```四、混沌映射的参数调节与分析混沌映射的动态行为受参数和初始条件的影响,可以通过调节参数来观察其不同的轨迹和性质。
在Matlab中,可以通过修改参数a、b的数值,以及初始值x(1)、y(1)来进行实验和分析。
五、混沌映射的应用混沌映射在密码学中具有重要的应用,例如可以用于生成密钥序列、乱序数据等。
混沌映射在通信领域、图像处理、随机数生成等方面也有广泛的应用。
在以上的应用中,混沌映射的不可预测性和随机性是其重要的特点,使得其在信息安全领域具有独特的优势。
六、总结与展望混沌映射作为一种重要的非线性动力系统模型,在数学理论和应用领域都具有重要意义。
随着对混沌映射的研究不断深入,其在密码学、通信、生物学等领域的应用将会更加广泛和深入。
利用Matlab进行分形分析和混沌系统建模

利用Matlab进行分形分析和混沌系统建模Matlab是一种非常强大的数学软件,它被广泛应用于科学研究和工程领域。
其中,分形分析和混沌系统建模是Matlab独特的应用之一。
本文将深入探讨利用Matlab进行分形分析和混沌系统建模的方法和技巧。
1. 引言在现代科学中,许多自然现象和复杂系统都表现出分形和混沌的特征。
这些特征对于理解和模拟真实世界中的各种现象非常重要。
Matlab作为一种功能强大的数学软件,为我们提供了丰富的工具和函数,用于分析和建模分形和混沌系统。
2. 分形分析分形是一种具有自相似性的几何形状,其特点是在不同尺度上具有相似的结构和形状。
Matlab提供了许多用于分形分析的函数和工具包,如boxcount、fractal、mandelbrot等。
我们可以使用这些函数来生成和分析分形图形,并计算其维数和特征。
例如,我们可以使用Matlab的boxcount函数来计算分形图形的盒计数维数。
首先,我们可以使用fractal函数生成一个分形图形,然后使用boxcount函数对其进行盒计数。
通过不断改变盒子的大小,我们可以计算出盒子的数量与尺寸之间的关系,从而得到分形图形的维数。
3. 混沌系统建模混沌系统是一类表现出极其敏感的初始条件的非线性动力系统。
这种系统展现出了高度的不确定性和随机性。
在Matlab中,我们可以建立混沌系统的模型,并进行仿真和分析。
Matlab提供了丰富的函数和工具包,用于建模和分析混沌系统。
例如,我们可以使用ode45函数来求解混沌系统的常微分方程,并生成系统的时间序列。
然后,我们可以使用plot函数绘制系统的相图和轨迹,并分析其特征。
另外,Matlab还提供了Lorenz系统、Henon映射、Logistic映射等经典混沌系统的建模工具包。
我们可以直接调用这些函数来生成和分析这些混沌系统,并探索它们的特性和行为。
4. 分形分析与混沌系统建模的应用分形分析和混沌系统在众多领域中都有广泛的应用。
混沌系统matlab代码
混沌系统通常指的是非线性、动力学复杂的系统,其行为难以预测。
在MATLAB中,您可以模拟混沌系统的行为。
以下是一个简单的混沌系统(例如,Logistic映射)的MATLAB 代码示例:
```matlab
% 定义参数和初始条件
r = 3.9; % 控制参数
x0 = 0.4; % 初始条件
n = 100; % 迭代次数
% 初始化数组来存储混沌序列
x = zeros(1, n);
x(1) = x0;
% 迭代计算混沌序列
for i = 2:n
x(i) = r * x(i-1) * (1 - x(i-1));
end
% 绘制混沌序列
plot(1:n, x);
title('混沌序列');
xlabel('迭代次数');
ylabel('值');
```
上述代码演示了一个简单的Logistic映射的混沌系统,其中`r` 是控制参数,`x0` 是初始条件,`n` 是迭代次数。
代码使用一个循环来迭代计算混沌序列,并通过`plot`函数绘制结果。
请注意,混沌系统有许多不同的方程和变种,具体的模拟方法和参数设置会根据您选择的系统而异。
您可以根据特定的混沌系统方程和参数来调整MATLAB代码以模拟不同的混沌行为。
此外,MATLAB还提供了一些混沌工具箱,可用于更复杂的混沌系统模拟和分析。
10种混沌映射matlab

10种混沌映射matlab如何在MATLAB中实现10种混沌映射引言:混沌理论是非线性动力学研究的一个重要分支,它研究的是一类具有确定性但展现出随机行为的系统。
混沌映射是混沌理论的基础,通过它可以生成一系列具有随机性质的数值序列。
本文将介绍10种经典的混沌映射,并提供在MATLAB中实现它们的详细步骤。
一、Logistic映射Logistic映射是最早被研究的混沌映射之一,它的迭代公式为:x(n+1) = r * x(n) * (1 - x(n))其中,x(n)表示第n次迭代的值,r是产生的随机参数。
在MATLAB中,可以通过以下步骤实现Logistic映射:1. 初始化参数:迭代次数N = 1000;初始值x = zeros(N, 1);随机参数r = 3.9;2. 进行迭代计算:初始化初始值x(1) = 0.5;进行迭代计算for n = 2:Nx(n) = r * x(n-1) * (1 - x(n-1)); end3. 可视化生成的混沌序列:绘制混沌序列plot(1:N, x);二、Henon映射Henon映射是一种二维混沌映射,其迭代公式为:x(n+1) = 1 - a * x(n)^2 + y(n)y(n+1) = b * x(n)其中,x(n)和y(n)分别表示第n次迭代的x坐标和y坐标,a和b是产生的随机参数。
在MATLAB中,可以通过以下步骤实现Henon映射:1. 初始化参数:迭代次数N = 10000;初始值x = zeros(N, 1);y = zeros(N, 1);随机参数a = 1.4;b = 0.3;2. 进行迭代计算:初始化初始值x(1) = 0.1;y(1) = 0.1;进行迭代计算for n = 2:Nx(n) = 1 - a * x(n-1)^2 + y(n-1);y(n) = b * x(n-1);end3. 可视化生成的混沌序列:绘制混沌序列plot(x, y);三、Tinkerbell映射Tinkerbell映射是一种二维混沌映射,其迭代公式为:x(n+1) = x(n)^2 - y(n)^2 + a * x(n) + b * y(n)y(n+1) = 2 * x(n) * y(n) + c * x(n) + d * y(n)在MATLAB中,可以通过以下步骤实现Tinkerbell映射:1. 初始化参数:迭代次数N = 100000;初始值x = zeros(N, 1);y = zeros(N, 1);随机参数a = 0.9;b = -0.6013;c = 2;d = 0.5;2. 进行迭代计算:初始化初始值x(1) = 0.1;y(1) = 0.1;进行迭代计算for n = 2:Nx(n) = x(n-1)^2 - y(n-1)^2 + a * x(n-1) + b * y(n-1);y(n) = 2 * x(n-1) * y(n-1) + c * x(n-1) + d * y(n-1); end3. 可视化生成的混沌序列:绘制混沌序列plot(x, y);四、Ikeda映射Ikeda映射是一种二维混沌映射,其迭代公式为:x(n+1) = u + d * cos(theta(n) - w)y(n+1) = v + d * sin(theta(n) - w)theta(n+1) = b - a / (1 + x(n)^2 + y(n)^2)在MATLAB中,可以通过以下步骤实现Ikeda映射:1. 初始化参数:迭代次数N = 5000;初始值x = zeros(N, 1);y = zeros(N, 1); theta = zeros(N, 1); 随机参数u = 0.9;v = 0.6;a = 0.4;b = 6;d = 0.9;w = 0.4 * pi;2. 进行迭代计算:初始化初始值x(1) = 0.1;y(1) = 0.1;theta(1) = 0;进行迭代计算for n = 2:Ntheta(n) = b - a / (1 + x(n-1)^2 + y(n-1)^2);x(n) = u + d * cos(theta(n) - w);y(n) = v + d * sin(theta(n) - w);end3. 可视化生成的混沌序列:绘制混沌序列plot(x, y);五、Lorenz映射Lorenz映射是一种三维混沌映射,其迭代公式为:x(n+1) = x(n) + dt * a * (y(n) - x(n))y(n+1) = y(n) + dt * (x(n) * (b - z(n)) - y(n))z(n+1) = z(n) + dt * (x(n) * y(n) - c * z(n))在MATLAB中,可以通过以下步骤实现Lorenz映射:1. 初始化参数:时间步长dt = 0.01;时间序列t = 0:dt:50;随机参数a = 10;b = 28;c = 8/3;初始值x = zeros(size(t));y = zeros(size(t));z = zeros(size(t));x(1) = 0.1;y(1) = 0.1;z(1) = 0.1;2. 进行迭代计算:进行迭代计算for n = 1:numel(t)-1dx = a * (y(n) - x(n));dy = x(n) * (b - z(n)) - y(n);dz = x(n) * y(n) - c * z(n);x(n+1) = x(n) + dt * dx;y(n+1) = y(n) + dt * dy;z(n+1) = z(n) + dt * dz;end3. 可视化生成的混沌序列:绘制混沌序列plot3(x, y, z);六、Chen映射Chen映射是一种三维混沌映射,其迭代公式为:x(n+1) = a * x(n) - y(n) * z(n)y(n+1) = c * y(n) + x(n) * z(n)z(n+1) = -b * z(n) + x(n) * y(n)在MATLAB中,可以通过以下步骤实现Chen映射:1. 初始化参数:迭代次数N = 10000;初始值x = zeros(N, 1);y = zeros(N, 1);z = zeros(N, 1);随机参数a = 35;b = 3;c = 28;2. 进行迭代计算:初始化初始值x(1) = 0.1;y(1) = 0.1;z(1) = 0.1;进行迭代计算for n = 2:Nx(n) = a * x(n-1) - y(n-1) * z(n-1);y(n) = c * y(n-1) + x(n-1) * z(n-1);z(n) = -b * z(n-1) + x(n-1) * y(n-1);end3. 可视化生成的混沌序列:绘制混沌序列plot3(x, y, z);七、Genesio-Tesi映射Genesio-Tesi映射是一种三维混沌映射,其迭代公式为:x(n+1) = y(n)y(n+1) = z(n)z(n+1) = -a * x(n) - b * y(n) - c * z(n) - x(n)^3 + u(n)在MATLAB中,可以通过以下步骤实现Genesio-Tesi映射:1. 初始化参数:迭代次数N = 10000;初始值x = zeros(N, 1);y = zeros(N, 1);z = zeros(N, 1);随机参数a = 0.1;b = 0.1;c = 14;u = 1;2. 进行迭代计算:初始化初始值x(1) = 1;y(1) = 1;z(1) = 1;进行迭代计算for n = 2:Nx(n) = y(n-1);y(n) = z(n-1);z(n) = -a * x(n-1) - b * y(n-1) - c * z(n-1) - x(n-1)^3 + u; end3. 可视化生成的混沌序列:绘制混沌序列plot3(x, y, z);八、Newton-Leipnik映射Newton-Leipnik映射是一种三维混沌映射,其迭代公式为:x(n+1) = x(n) + 0.1 * (y(n) - x(n)^5)y(n+1) = y(n) + 0.1 * (z(n) - y(n)^5)z(n+1) = z(n) + 0.1 * (-0.4 * z(n) - x(n) * y(n))在MATLAB中,可以通过以下步骤实现Newton-Leipnik映射:1. 初始化参数:迭代次数N = 100000;初始值x = zeros(N, 1);y = zeros(N, 1);z = zeros(N, 1);2. 进行迭代计算:初始化初始值x(1) = 0.1;y(1) = 0.2;z(1) = 0.3;进行迭代计算for n = 2:Nx(n) = x(n-1) + 0.1 * (y(n-1) - x(n-1)^5);y(n) = y(n-1) + 0.1 * (z(n-1) - y(n-1)^5);z(n) = z(n-1) + 0.1 * (-0.4 * z(n-1) - x(n-1) * y(n-1)); end3. 可视化生成的混沌序列:绘制混沌序列plot3(x, y, z);九、Zaslavskii映射Zaslavskii映射是一种三维混沌映射,其迭代公式为:x(n+1) = a * x(n) + y(n) * z(n)y(n+1) = b * y(n) + z(n) * x(n)z(n+1) = c * z(n) + x(n) * y(n) + x(n) * z(n)在MATLAB中,可以通过以下步骤实现Zaslavsk。
tent混沌序列matlab代码
tent混沌序列matlab代码我们需要了解tent混沌序列的生成算法。
tent混沌序列是通过一个迭代公式生成的,其迭代公式如下:x(n+1) = a * x(n),若x(n) < 0.5x(n+1) = a * (1 - x(n)),若x(n) >= 0.5其中,x(n)为第n个序列值,a为常数,通常取值在(0, 2)之间。
通过不断迭代该公式,我们可以得到一个具有混沌特性的序列。
tent混沌序列具有以下几个特点:1. 非线性:由于迭代公式中包含非线性的判断条件,使得生成的序列具有非线性特性,这使得它在一些加密和随机数生成的应用中非常有用。
2. 敏感依赖于初始值:tent混沌序列对初始值非常敏感,微小的初始值变化会导致最终生成的序列完全不同,这为一些需要高度随机性的应用提供了可能。
3. 周期性:尽管tent混沌序列具有混沌特性,但它也具有一定的周期性。
当初始值和常数a取不同的值时,序列的周期也会有所不同。
接下来,我们将介绍tent混沌序列在实际应用中的意义。
1. 加密通信:混沌序列具有不可预测性和高度随机性的特点,可以用于加密通信中的密钥生成。
通过将tent混沌序列作为密钥流与明文进行异或操作,可以实现高强度的加密保护,增加了破解的难度。
2. 伪随机数生成:混沌序列可以用于生成伪随机数,这些伪随机数在统计上具有与真随机数相似的特性,可以用于模拟实验、数值计算、随机模型的构建等方面。
3. 混沌调制:混沌序列可以作为调制信号,在通信系统中实现抗干扰、抗窃听等功能。
通过将混沌序列与原始信号进行混合,可以增加信号的难以预测性,从而提高通信系统的安全性和可靠性。
4. 图像加密和水印:混沌序列可以用于图像加密和水印技术中。
通过将混沌序列与原始图像进行异或操作,可以实现图像的加密。
同时,混沌序列也可以用于生成水印,将水印嵌入到图像中,以实现版权保护和身份验证等功能。
5. 模拟电路设计:混沌序列可以用于模拟电路的设计和测试中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。