汽车驱动防滑控制系统控制算法的研究
ASR的滑模变结构控制方法及仿真研究

控制函数就可表示为 :
m( s ) =e ’ +f P, c > O
一 | 、 f . F p 1
|
r
.
式中 , c 为待 定常数 , 反映 了系统状 态对控制 切换 函数 r e( s ) 影响 的 大 小。滑模 变结构控 制系统 的设 计成为 : 根 据控制 目标 选择适 当的切 换 函数 r e ( s ) 和控制变量 u 和U 一 , 使得满 足条件式 m m’ <O, 这样 才能保 证 在相 同平 面内的任一 初始点都 能抵达切换 线 , 并 能沿 着切换 线滑 向 控制 目标 。 比例切换控 制 :
+C S< 0
由s =1 一旦 , 并对其求一二 阶导数 , 并带 入式 中 ,
得: ’ =
( c J F
”
对驱动车轮纵 向力平衡可得 :
ml =Fn—Fp ( 2 )
=
{( 2 ” 一 3 “ 一 2 ( ) + 2 2 )
r 式中 : m :Fra bibliotek驱 动轮质 量; J : 驱动轮转动惯量 ; F 作用在驱动轮上的地面切向反作用力 ; T f , : 驱动轮滚动阻力偶矩 ; F : 驱动轴作用于驱动轮的平行于路面的力 ; r : 驱动车轮半径 : T: 半轴作用于驱动轮的转矩。 3 . 滑 模 变 结 构 控 制 方 法 的 基 本 原 理 滑模变结构控 制是变结构控制系统 的一种控制策 略。这种控制策 略与 常规控制 的根本区别在 于控制 的不连续 性 , 即一 种使系统结 构随
”
+ ’ = ÷ ( 。 ” 一 。 ” 一 2 w v ( w ’ ) + 2 w 。 ) + f — : — 垒
汽车防滑控制系统

汽车防滑控制系统1概述汽车防滑控制系统就是对制动防抱死系统和驱动防滑系统的统称。
制动防抱死系统 (Anti-lock Braking System),简称 ABS。
驱动防滑系统(Acceleration Slip Regulation),简称 ASR。
它也被称为驱动力控制系统(Traction Control System),简称 TCS。
轮胎与路面的附着关系:Fμ=μGFμ——轮胎与路面间的附着力,NG ——轮胎与路面间的垂直载荷,Nμ——轮胎与路面间的附着系数。
由于轮胎与路面之间的垂直载荷和附着系数会随许多因素而变化,因此,轮胎与路面间的附着力实际上是经常变化的。
1.1车轮滑动率对附着系数的影响车轮相对于路面的滑动可分为滑移和滑转两种形式,引入车轮滑动率的概念可以表征车轮运动中滑动成分所占的比例。
(1)汽车在制动过程中,车轮可能相对于路面发生滑移,滑移成分在车轮纵向运动中所占的比例可以由负滑动率表征。
SB =(rω-v) / v ×100%(1)-100%< SB <0,车轮滑移所占成分越多, SB 越大。
(2)汽车在驱动过程中,驱动车轮可能相对于路面发生滑转,滑转成分在汽车纵向运动中所占的比例可由正滑动率表征。
SA=(rω-v) / rω×100% (2)0< SA <100%,车轮滑转比例越大, SA 越大。
通过试验发现,在硬实路面上,弹性车轮与路面间的附着系数μ和滑动率 S 存在如下图1所示的关系。
图1 附着系数与滑动率的一般性关系1.2防滑控制系统的作用与工作原理使汽车能够自动地将车轮控制在纵向和横向附着系数都很大的滑动率范围内。
制动防抱死系统在制动过程中,通常将车轮滑移率控制在10%~20%的范围内;驱动防滑系统在驱动过程中,通常将车轮滑移率控制在5%~15%的范围内。
制动防抱死系统 (ABS) 都是在制动过程中,通过调节轮缸(或制动气室)的制动压力使作用车轮的制动力矩受到控制,从而控制车轮的滑移率。
汽车驱动防滑控制仿真系统分析研究
文章编号:1007-757X(2021)02-0099-03汽车驱动防滑控制仿真系统分析研究崔晓琳(烟台汽车工程职业学院汽车工程系,山东烟台265500)摘要:针对小型电动汽车为有效实现驱动防滑功能,对汽车驱动防滑控制系统进行了研究和设计"该系统采用纯电动机控制,对于汽车目标滑转率结合运用路面自动识别方法及经验目标值完成确定过程,防滑控制过程涉及的电动机输出转矩通过PID控制算法(积分分离型)8使用实现有效8驱动控制过程,将该驱动防滑控制系统在不同路面上进行驱动加速仿真实验,结果表明该系统可完成驱动轮滑转率到目标滑转率附近快速准确地控制过程,证明了该控制算法及策略8有效性°关键词:驱动防滑控制系统;控制策略;PID控制算法;实现路径中图分类号:U463文献标志码:AAnalysis and Research on Simulation System of AutomobileDrive Anti-slip ControlCUIXiaolin(Department Of Automotive Engineering,Yantai Automobile Engineering Professional College,Yantai265500,China) Abstract:In order to effectively realize the anti-skid driving function of small electric vehicles,this paper mainly studies and designs the automotive anti-skid control system.The system uses pure motor control,and uses the automatic road surface recognition method and empirical target value for the target slip rate.After completing the determination process,the output torque of the motor involved in the anti-skid control process is used to implement an effective drive control process through the use of the PID control algorithm(integral separation type).This system can complete the fast and accurate control process from the driving wheel slip rate to the target slip rate!which proves the e f ectiveness of the control algorithm and strategy in this paper Key words:drive skid control system;control strategy;PID control algorithm;implementation path0引言在节能环保的大背景下,具备零排放特性的电动汽车顺应了未来汽车领域的发展趋势受到越来越多的关注,可有效满足能源利用绿色清洁化的发展需求,成为未来重要的交通出行方式,可实现单轮层面力矩控制的分布式驱动电动汽车因具有控制自由度较大、力矩精确度易于控制和响应速度较快等动力学控制方面的优势而成为目前领域内的一项研究热点。
汽车系统控制算法及其硬件在环仿真研究
分为3段:轮速小于埘。时,需要快速增加节气门开
度;轮速大于∞,时,需要快速减小节气门开度;轮速
在这两个门限值之间时,需要对节气门开度进行精确
调节,使轮速趋近于饥。这3种调节方式均采用PID
控制方法,但是不同PID参数组合,在离线仿真阶段
进行整定。整定PID参数时,前2种调节方式侧重于
响应速度,第3种调节方式侧重于控制精度和稳定
A Research on the Control Algorithm and Its HIL Simulation of Automotive ASR Systems
Wang Weidal,Ding Nenggen2,Zou Hongmin92,Yu Guizhen2&Xu Xiangyan92
1.School ofMechanical Engineering,Beijing Institute of Technology,&咖孵100081; 2t School of Transportation Sdence and Engineering,Beihang University,Beijing 100191
xn[e(尼)一2e(k一1)+e(k一2)】
(1)
lI(后)=u(k一1)+Au(五)
(2)
式中u(.j})、配(k一1)和au(后)分别为k与k一1时
刻的控制量和k时刻的控制量增量;e(J|})、e(k—1)
和e(k一2)分别为各时刻的误差值;Kp、KI和K。分
别为PID控制的比例、积分和微分系数。
[Abstract]The control strategy for ASR with the throttle opening regulation supplemented by brake interven· tion is studied.Based on the conventional control algorithms of throttle opening,all adaptive PID algorithm is pro- posed.The logic threshold method is adopted for brake intervention.To assure the direction stability in vehicle ac- celeration,the estimation method of yaw moment during brake intervention and the method of limiting the brake pressure according to yaw moment ale investigated.The program code for the control algorithm is written into the self-developed ECU and is validated by hardware·in-the—loop simulation with dSPACE.The simulation results indi—
客车驱动防滑系统控制算法的研究
pr r neadt  ̄csf y r i poe . hog nl i ot l f c A R,h he spri ot l bet e e omac n ' e e m rvd T ruhaa z gcn i i o S tew ell t cn o oj i s f I a a ta yn o r p n  ̄e f i ao r cv
文章编号 :0 6— 4 4 2 1 ) 2— 0 2— 4 10 4 1 (0 0 0 0 1 0
Re e r h o r la g r t m f ASR o s s a c on c nt o l o ih o f r bu
Wag I n . ei
( m  ̄i n e i Ja s H i n a g 10 8 , hn ) J m w  ̄@, i i eo ̄in 0 0 1 C i u mu l a
明确 滑转率的控制 目标 , 结合 A R的控 制途径和控制策略 , S 阐述 了 A R的 常用控 制算法, S 并对其进 行 比较 ,
探 讨 了 A R控 制 算 法 的选 择 依 据 和 方 法 。 S
关键词 : S 控制算法; A R; 滑转率
中图分类号 :d 3 U6
文献标识码 : A
d i ig wh es k d wh n y u sa t rs e d u ,b o tol g te d ii g w e ltr u u o t al ,t e a tmo i rvn rvn e l s i e o tr o p e p yc n r l n rvn h e q e a t mai l i h o c y h uo b l d i g e i
6:—J— r -v×1 0% o 0
一文了解驱动轮防滑转调节技术(ASRTCSTRC)
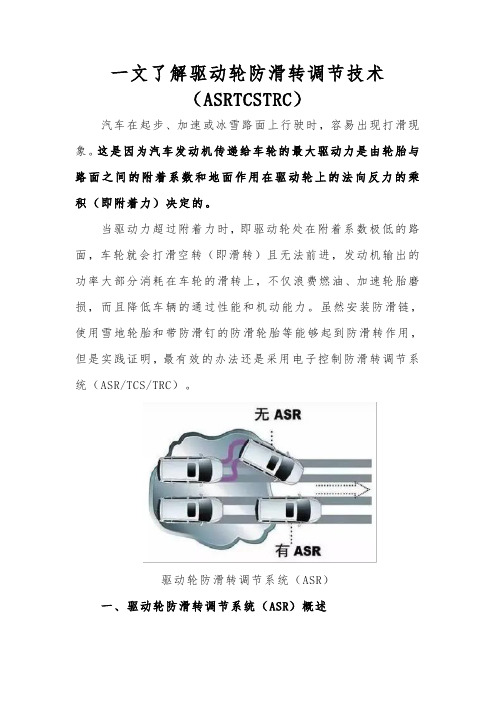
一文了解驱动轮防滑转调节技术(ASRTCSTRC)汽车在起步、加速或冰雪路面上行驶时,容易出现打滑现象。
这是因为汽车发动机传递给车轮的最大驱动力是由轮胎与路面之间的附着系数和地面作用在驱动轮上的法向反力的乘积(即附着力)决定的。
当驱动力超过附着力时,即驱动轮处在附着系数极低的路面,车轮就会打滑空转(即滑转)且无法前进,发动机输出的功率大部分消耗在车轮的滑转上,不仅浪费燃油、加速轮胎磨损,而且降低车辆的通过性能和机动能力。
虽然安装防滑链,使用雪地轮胎和带防滑钉的防滑轮胎等能够起到防滑转作用,但是实践证明,最有效的办法还是采用电子控制防滑转调节系统(ASR/TCS/TRC)。
驱动轮防滑转调节系统(ASR)一、驱动轮防滑转调节系统(ASR)概述汽车防滑转调节系统(ASR,Anti-Slip Regulation System)又称为加速滑移调节系统(Acceleration Slip Regulation System),因为防止驱动轮滑转能够通过调节驱动轮的驱动力(牵引力)来实现,故又称为牵引力控制系统(TCS 或TRC,Traction Force Control System)。
驱动(轮)防滑系统(ASR)是车辆重要的主动安全技术之一,其功能是防止车辆在大加速度/低附着路面工况下轮胎过度滑转,提高车辆的安全性。
驱动轮防滑转调节系统ASR作用:在车轮开始滑转时,降低发动机的输出转矩来减小传递给驱动轮的驱动力,防止驱动力超过轮胎与路面之间的附着力(或通过增大滑转驱动轮的阻力来增大未滑转驱动轮的驱动力,使所有驱动轮的总驱动力增大),从而提高车辆的通过性。
汽车ASR控制效果图ASR与ABS密切相关,都是汽车的主动安全装置,两个系统通常同时采用。
ABS的作用是自动调节(增大或减小)制动力,防止车轮抱死滑移,提高汽车的制动性能;ASR的作用是维持附着条件,增大总驱动力,防止车轮抱死滑转,提高汽车的通过性。
二、驱动轮防滑转调节系统(ASR)基本原理驱动(轮)防滑系统是根据驱动轮和传动轮的转数来判定驱动轮是否发生打滑现象,进而抑制驱动轮转速的一种防滑控制系统,是一套基于ABS系统一起对有滑转趋势的驱动轮进行控制的系统。
2 驱动防滑转系统(ASR)

图2-4 ASR制动液压系统 1-ASR电磁阀总成 2-单向阀 3-压力传感器 4-蓄能器 5-制动供能总成 6-液压泵 7-电动机 8-储液器隔离电磁阀 9-单向阀 10-ABS制动压力调节器 11-右后驱动车轮 12-ABS右后轮电磁阀 13-蓄能器隔离电磁阀 14-回油泵 15-储液器 16-制动主缸隔 离电磁阀 17- ABS左后轮电磁阀 18-左后驱动车轮
• 4)ASR工作时具有不同的优先选择性,当车速较低时, 优先考虑提高牵引力,因此可以只对滑转一侧的车轮制动, 或者对滑转程度不同的两侧驱动轮施加不同的制动力矩。 但当车速较高时,优先考虑行驶稳定性,即使一侧车轮滑 转时,也同时对两侧驱动轮施加相等的制动力矩。 • 5)ASR具有自诊断功能,当自诊断系统诊断出系统有故 障时,ASR将自动退出工作,并点亮警告灯。 • 6)ASR和ABS都是通过控制作用于被控车轮上的力矩, 而将车轮的滑移率或滑转率控制在理想范围内,以提高附 着系数的利用率,从而缩短汽车制动距离或提高汽车的加 速性能,改善汽车的行驶方向稳定性和转向控制能力。
• ② 制动供能总成 • 制动供能总成主要由TRC液压泵、蓄能器和压力传感 器等组成。压力传感器安装在TRC隔离电磁阀总成的旁边, 为接触开关型,当蓄能器内的压力高于13.24MPa时,开 关断开;当压力低于9.32MPa时,开关接通。压力传感器 信号送入ABS/TRC ECU,ABS/TRC ECU根据开关信号 控制TRC液压泵工作或停止。制动供能总成如图2-8所示。
(4)TRC执行器 TRC执行器包括控制滑转车轮制动的TRC 制动压力调节器和控制副节气门开度的步进电动机。TRC 制动压力调节器由隔离电磁阀总成和制动供能总成组成。
① 隔离电磁阀总成
图2-7 TRC隔离电磁阀总成 1-储液器隔离电磁阀 2-蓄能器隔离电磁阀 3-制动主缸隔离电磁阀 4-压力传感器
一种基于前驱纯电动汽车的驱动防滑控制方法及装置
一种基于前驱纯电动汽车的驱动防滑控制方法及装置一、前言。
小伙伴们!今天咱们来聊聊这个超级酷的基于前驱纯电动汽车的驱动防滑控制方法及装置。
你想啊,纯电动汽车现在可是越来越流行了,就像一阵潮流风席卷而来。
但是呢,在行驶过程中,防滑可是个大问题。
要是在湿滑的路面上,车就像个调皮的小泥鳅,不好控制可就危险啦。
所以这个驱动防滑控制方法及装置就像是汽车的“小保镖”,超级重要呢。
二、前驱纯电动汽车的特点。
前驱纯电动汽车啊,它有自己的小脾气。
它的动力主要是由前面的轮子来带动的,这样的设计呢,让车在一些方面有独特的表现。
比如说,它的前部比较重,因为电机啥的都在前面嘛。
这就导致在一些特殊路况下,比如有冰或者水的路面,它更容易出现打滑的情况。
就像一个人穿着不合适的鞋子在滑溜溜的地面上走路,一不小心就会摔个大跟头。
三、驱动防滑的重要性。
1. 安全保障。
防滑对于我们开车的人来说,那就是安全的大保障啊。
要是车在行驶中突然打滑,那可不得了。
可能会撞到旁边的东西,或者直接失去控制。
这就像在走钢丝的时候突然刮来一阵大风,要是没有保护措施,肯定会掉下去的。
所以这个驱动防滑控制方法能让我们在开车的时候安心不少。
2. 提高驾驶体验。
想象一下,你开着车,在湿滑的路面上,别人的车都在小心翼翼地挪动,而你的车稳稳当当的,就像在干燥的路面上一样。
这多酷啊,驾驶体验一下子就提升了。
不会有那种提心吊胆的感觉,能够尽情享受开车的乐趣。
四、驱动防滑控制方法。
1. 传感器检测。
这种方法呢,会在汽车上安装一些很厉害的传感器。
这些传感器就像汽车的小眼睛和小耳朵,能够检测到车轮的转速、车辆的加速度等等信息。
比如说,当车轮的转速突然变得很快,超过了正常行驶在这个路面应该有的速度,那就很可能是车轮在打滑了。
这时候传感器就会把这个信息传递给控制装置。
2. 控制算法。
控制装置收到传感器传来的信息后,就会启动它的控制算法。
这个算法就像是一个超级聪明的大脑,它会根据传来的信息计算出应该给车轮施加多大的制动力或者调整多少动力输出。
汽车驱动防滑控制系统控制方式的研究
0 绪 论
A 。=l V — ) j×1 0 (w / 0%
汽车 驱动 防滑控 制 系统 ( S 是 通 过 自动 控 制 A R) 驱动 车轮 的驱 动力 矩 步、
时使 驱动 轮不 致过 度滑转 , 以提 高 汽 车 的驱 动 性 、 稳 定性及 安全 性 能的控 制 系统 。 汽车 驱动 防滑控 制 系统 是在 A 5的基 础上发 展 B 起来 的 , 多 控 制 元 件 是 共 用 的 。1 7 很 9 1年 , U C B IK 公 司研 制 了驱 动 防抱 死 系 统 , 为 AS 成 R的 雏 形 。该 系统是 通过 电子 控 制 装 置 自动 中断 机 点 火 , 殳动 以 减小 发 动 机 输 出 转 矩 , 止 驱 动 车 轮 发 生 滑 转 。 防 18 9 5年 , O V V L O公 司试 制 了 电子 牵 引 力 控 制 系 统 。 该 系统通 过 调 节 燃 油 供 给 量 来 调 节 发 动 机 输 出 转 矩 , 制 驱 动 轮 滑 转 率 , 高 驱 动 性 能 。第 二 年 , 控 提 B S H研 制牵 引力 控 制 系 统 。但 是 . 依 靠 控 制 输 OC 仅 出扭矩 未 能达 到最 佳 控 制 效 果 , 着 A S技 术 的不 随 B 断发 展和 成熟 , 采用 制 动 干 预控 制 的 A R 系统 通 常 S 与 A S集 成在 一起 , B 形成 A S A R系统 。该 系统 可 B/ S 以更 好 控 制 滑 转 率 , 到 最 佳 控 制 目标 。 同 年 1 达 2 月 ,O C B S H公 司率 先 推 出 A S A R 防 滑 控 制 系 统 , B/ S 具有 防抱 死制 动和 驱动 防滑 转功 能 。 A R主 要作用 是 为 了防止 汽 车在 低 附着 路 面 上 S 驱动 轮 滑 转 , 高 车 辆 行 驶 的稳 定 性 、 向操 纵 能 提 转
电动汽车驱动防滑控制策略的研究

其 中: F f为 滚 动 阻 力 , N, F s 一厂 G ( 1 +
) C O S 0  ̄ ,
f为滚 动 阻力 摩擦 系数 , G— Mg , M 为满 载 总质 量 , k g , 口 为 坡 度 角 ;F 为 迎 风 阻 力 ,N,F 一
电动 汽 车驱 动 防滑 控 制 策 略 的研 究
张 俊 娜
( 山西 机 电职 业 技 术 学院 汽 车工 程 系 , 山 西 长 治 0 4 6 0 1 1 )
摘 要 : 电动 汽 车 驱 动 防滑 控 制 系统 是 一种 主 动 安全 控 制 系 统 , 是 继 防 抱 死 制 动 系 统 之 后 应 用 于 汽 车 上 的 控 制
.
的大 小 , 本 文 着重考 虑 滑移率 对纵 向附着 系数 的影 响 。 汽车 驱动 防滑 控制 系统 充分 利用 纵 向附着 系数 / 1 与 滑 移率 S的关 系 , 将 汽 车 驱 动 轮 的 滑移 率 稳 定 在 0 . 1 ~
0 . 3的 区 间 内 。
稳 定 非稳定 区
系 统 。 将 电 动 汽 车 作 为 研 究 的对 象 ,首 先 建 立 电 动汽 车 的 动 力 学模 型 , 接 着 介 绍 电动 汽 车 驱 动 防滑 控 制 的 方 法 ,设 计 P I D 与 模 糊 驱 动 防滑 控 制 器 , 对 比在 同一 路 面 上 P I D 与模 糊 控 制 器 的控 制 效 果 , 得 出这 两 种 控 制
器 的控 制 特 点 。
关 键 词 : 电动 汽 车 ;驱 动 防滑 控 制 ;S i mu l i n k ;P I D 控 制 ;模 糊 控 制
四轮驱动汽车驱防滑控制系统的设计
Classified Index: 461.6University Code:10213 U.D.C: 629Security:OpenDissertation for the Master’s Degree in EngineeringDESIGN OF ACCELERATION SLIP REGULATION FOR FOUR WHEEL DRIVEVEHICLECandidate:Wang LiangliangSupervisor:Prof. Bian WenfengAcademic Degree Applied for:Master of Engineering Speciality:Vehicle EngineeringAffiliation:School of Automobile Engineering Date of Defence:June, 2009Degree-Conferring-Institution:Harbin Institute of Technology-II-哈尔滨工业大学工学硕士学位论文摘要驱动防滑控制系统ASR的基础是ABS,是在ABS为基础上的延伸,ABS 和ASR统称为防滑控制系统。
驱动防滑控制系统通过调节作用于驱动轮的驱动力矩来控制驱动轮的滑转率,从而使汽车的操纵性、横向稳定性、动力性以及燃油经济性都得到提高。
四轮驱动汽车与二轮驱动汽车相比,因为其每个轮胎所受的驱动力只有二轮驱动汽车的一半,故具有更好的越野性能,然而,四轮驱动汽车本身存在许多不足,比如:短时四轮驱动汽车操作繁琐;常时四轮驱动汽车由于前后驱动桥之间以及左右驱动轮之间通过差速器连接,只要一个车轮处于低附着系数路面上时,整车驱动力几乎丧失。
将驱动防滑控制系统用于四轮驱动汽车将有可能解决四轮驱动汽车打滑的问题。
本文主要从轮胎的滑转以及整车的动力性等方面来分析驱动防滑控制系统对于四轮驱动汽车的影响,主要内容包括以下几个部分:1、分析四轮驱动汽车的驱动特点,制定出四轮驱动汽车驱动防滑控制系统的控制策略。
第五章 电控驱动防滑/牵引力控制系统(ASR/TRC)
一、填空(1)ABS控制的是汽车制动时车轮的“拖滑”,主要是用来提高制动效果和确保制动安全。
(2)ASR是控制车轮的“滑转”,用于提高汽车起步、加速及在滑溜路面行驶时的牵引力和确保行驶稳定性。
(3)ASR的传感器主要是车轮车速传感器和节气门开度传感器。
(4)ASR制动压力源是蓄压器,通过电磁阀调节驱动车轮制动压力的大小。
二、判断(1)ABS控制的是汽车制动时车轮的“拖滑”,主要是用来提高制动效果和确保制动安全。
(√)(1)ASR控制的是汽车加速时车轮的“拖滑”,主要是用来提高制动效果和确保制动安全。
(×)(2)ASR是控制车轮的“滑转”,用于提高汽车起步、加速及在滑溜路面行驶时的牵引力和确保行驶稳定性。
(√)(2)ABS是控制车轮的“滑转”,用于提高汽车起步、加速及在滑溜路面行驶时的牵引力和确保行驶稳定性。
(×)(3)ASR只对驱动车轮实施制动控制。
(√)(3)ASR可以对驱动车轮和从动车轮同时实施制动控制。
(×)(4)当车速很低(小于8km/h)时,ABS系统不起作用。
(√)(4)当车速很低(小于40km/h)时,ABS系统不起作用。
(×)(5)将ASR选择开关关闭,ASR就不起作用。
(√)(5)即使将ASR选择开关关闭,ASR也能起作用。
(×)(6)单独方式是ASR制动压力调节器和ABS制动压力调节器在结构上各自分开。
(√)三、简答题1、汽车打“滑”的分类汽车打“滑”有两种情况,一是汽车制动时车轮的滑移,二是汽车驱动时车轮的滑转。
2、ASR的主要传感器ASR的传感器主要是车轮车速传感器和节气门开度传感器。
四、问答题1、ASR的基本功能ASR的基本功能是防止汽车在加速过程中打滑,特别是防止汽车在非对称路面或在转弯时驱动轮的空转,以保持汽车行驶方向的稳定性,操纵性和维持汽车的最佳驱动力以及提高汽车的平顺性。
2、ASR的工作原理车轮车速传感器将行驶汽车驱动车轮转速及非驱动车轮转速转变为电信号,输送给电子控制单元(ECU)。
驱动防滑转电子控制系统(ASR)

3 ASR与ABS的区别 (1)两者都是用来控制车轮相对于地面的滑动, 以使车轮与地面的附着力不下降,但ABS控制的是制动 时车轮的“滑拖",而ASR是控制的驱动时车轮的“滑转 "。 (2)ASR只对驱动车轮实施制动控制。 (3)ABS是在汽车制动后车轮出现抱死时起作用, 当车速很低时(一般低于8 km/h)不起作用;而ASR则 是在汽车行驶过程中车轮出现滑转时起作用,当车速很 高(一般高于80~1 20km/h)时一般不起作用。
驱动防滑转电子控制系统 (ASR)
制作:孙大力 2009.5
随着发动机通过传动系作用在驱动轮上转矩的不断 增大,汽车的驱动力也逐步增大,但我们知道当驱动力 超过地面附着力时,驱动轮就会打滑。我们有时会看到 汽车起步时,尽管驱动轮不停地转动,但汽车却原地不 动,这就是所谓的驱动轮滑转。
那么如何解决这个问题呢? 我们今天就讲解决的方法——驱动防滑转电子控制 系统(ASR)。
ASR
7
(3)对可变锁止差速器进
行控制:
电脑这根是据一轮种速电传子感控器制 可传变来锁的止轮差速速 信器 号, 、也车把速它信 称号作判限定滑车差轮速 是器 否处(LS于D滑)控转 制状。态如,图若所处示 于, 滑它 转主状要态由则 装向在电差磁速阀器发壳 出与 指半 令轴接齿通轮蓄 间能的器多与片离离合合 器器 的、 油改路变,离增 合加器油控压制使油离压 合的 器电 锁磁止阀,、电 提脑供可控以制根压据力 传的 感高 器压反蓄馈能信 器号、随感时知调控整制 对压 电力 磁的阀油的压控 传的等制持制感轮组指在方(器速成令目法4)、传。,标多对感感使值是发知 器 车 范 通动驱 及 轮 围 过机动 控 滑 内 控与轮制转。制驱轮电率变动速脑保速轮器之的间的的换转档矩特进性行、控改制变:传这动种比控来 实现的。以上4种控制方式中AS,R前两者组合使用的较普遍8 。
ASR、TCS、TRC-汽车驱动防滑转电子控制系统的原理
若超过此值便发出指令控制副节气门的步进电机转动减小节气
门开度,此时,即使主节气门的开度不变,发动机的进气量也
会因副节气门的开度减小而减小,从而发动机的输出转矩,驱
动车轮的驱动力也就会随之下降。如果驱动车轮的滑转率仍未
降到设定范围值内,ABS/ASRECU又会控制ASR制动执行器,对
驱动车轮施加一定的制动力,进一步控制驱动车轮的滑转率,
系数。显然要靠人工来适
时快速完成驱动力的调节 是不现实的,因此ASR系 统应运而生。
ASR系统是以驱动力
为控制对象的,驱动力又
称为牵引力,故ASR系统
也称为牵引力控制系统,
简称TRC。
ASR系统的主要控制方式
ASR系统的控制目标参数是驱动轮滑转率,主要的控制方式有:
(1)对发动机输出转矩进行控制:
(1)两者都是用来控制车轮相对于地面的滑动,以 使车轮与地面的附着力不下降,但ABS控制的是制动 时车轮的“滑拖”,而ASR控制的是驱动时车轮的 “滑转”。
(2)ASR只对驱动车轮实施制动控制。 (3)ABS是在汽车制动后车轮出现抱死时起作用,
当车速很低(低于8km/h)时不起作用;而ASR则是在 汽车行驶过程中车轮出现滑转时起作用,当车速很高 (高于80-120km/h)时一般不起作用。 (4)两者都需要轮速传感器。
在节气门体上还设有主、副节气门位置传感器,其检测的信 号先送人发动机和变速器电脑,再由发动机和变速器电脑送至 ABS/TRC ECU。
二、工作过程
工作条件:
(1)TRC关断开关处于断开位置; (2)主节气门位置传感器怠速触点应断开(驾驶员在踩加速踏板); (3)制动开关处于断开位置; (4)发动机及变速器系统正常; (5)变速操纵杆不在“P”、“ N”位置。
驱动防滑系统
ASR系统的应用
随着各大公司不断开 发出结构更紧凑、成 本更低、可靠性更强、 功能更全面的 ABS/ASR系统, ABS/ASR系统也逐 渐应用于中低档汽车 上,到1997年时, 已有27家汽车厂商 近30种车型使用了 ABS/ASR系统。
ASR系统不足
ABS/ASR只是解决了紧急制 动时附着系数的利用,并可获 得较短制动距离和制动方向稳 定性,但它不能解决制动系统 中所有缺陷。因为其控制方法 以门限值为主。此种方法虽简 单但逻辑复杂,所有门限值都 需大量实验确定,调试很困难, 而且逻辑门限值控制的 ABS/ASR通用性差,需要针 对不同车型重新开发。
2.保压过程
当轮速传感器发出抱死危险 信号时,ECU想电磁线圈通入一 个较小的保持电流(约为最大 电流的1/2)时,电磁阀处于 “保压”状态。此时主缸、轮 缸和回油孔之间相互隔离密封, 轮缸中的制动压力保持一定。
3.减压过程
如果在"保持压力”命令发 出后,仍有车轮抱死信号, ECU即向电磁线圈通入一个最 大电流,电磁阀处于“减压” 位置,此时电磁阀将轮缸与回 油通道或储液室接通,轮缸中 制动液经电磁阀流入储液室, 轮缸压力下降。
四轮驱动汽车驱动防滑控制系统的设计

四轮驱动汽车驱动防滑控制系统的设计摘要驱动防滑控制系统ASR的基础是ABS,是在ABS 为基础上的延伸,ABS 和ASR 统称为防滑控制系统。
驱动防滑控制系统通过调节作用于驱动轮的驱动力矩来控制驱动轮的滑转率,从而使汽车的操纵性、横向稳定性、动力性以及燃油经济性都得到提高。
四轮驱动汽车与二轮驱动汽车相比,因为其每个轮胎所受的驱动力只有二轮驱动汽车的一半,故具有更好的越野性能,然而,四轮驱动汽车本身存在许多不足,比如:短时四轮驱动汽车操作繁琐;常时四轮驱动汽车由于前后驱动桥之间以及左右驱动轮之间通过差速器连接,只要一个车轮处于低附着系数路面上时,整车驱动力几乎丧失。
将驱动防滑控制系统用于四轮驱动汽车将有可能解决四轮驱动汽车打滑的问题。
本文主要从轮胎的滑转以及整车的动力性等方面来分析驱动防滑控制系统对于四轮驱动汽车的影响,主要内容包括以下几个部分:1、分析四轮驱动汽车的驱动特点,制定出四轮驱动汽车驱动防滑控制系统的控制策略。
通过调节发动机的输出扭矩以及控制制动器来控制车轮的相对滑转。
原始输入参考模型车发动机输出数据。
2、建立四轮驱动汽车驱动的简化数学模型。
本文主要为控制算法的研究,故数学模型可适当简化,并将汽车行驶的条件设置为相对简单的路面情况。
3、进行ASR 系统的控制算法研究。
并主要探讨了模糊控制在四轮驱动汽车ASR 系统上的应用。
分别设计了发动机输出扭矩控制器和制动力矩模糊控制器。
4、根据所建立的数学模型在MATLAB/SIMULINK 环境下建立仿真模型,并进行了不同路面上的仿真分析。
仿真结果表明驱动防滑控制系统对于四轮驱动汽车的驱动轮滑转起到了较好的抑制作用,并且使得四轮驱动汽车的动力性得到一定的提高,同时也验证了控制策略的正确性以及控制算法的可行性。
关键词:驱动防滑;四轮驱动;轮胎模型;MATLAB仿真;模糊控制AbstractAcceleration slip regulation (ASR) was developed based on Anti-lock Brake System (ABS). It is the extension of ABS to the driving course. So ABS and ASR are called a control system preventing slide by a joint name. ASR can control the slippages of the driving wheels by adjusting the driving moments acting on the driving wheels. Accordingly improves the handling performance、transverse stability、dynamic performance and economics.Four wheel drive vehicle has better cross-country performance than two wheel drive vehicle. So it usually passes for SUV. However, four wheel drive vehicle has many shortages. To drive a short-time four wheel drive vehicle is very troublesome. Because the front and rare driving bridges of a long-time four wheel drive vehicle are connected through a differential as well as the left and right driving wheels, certain wheel on the road with low coefficient of friction will result in else wheels’ driving power descend much, so th e power to drive the car become almost zero. ASR can possibly solve the four wheel drive vehicle’s problem of slip. So this paper mainly analysis the ASR’s effect on the four-wheel-drive vehicle from the angle of dynamic performance. This paper mainly includes several parts as follows:1. The control strategies were set down by analysis the character of four wheel drive vehicle when driving. That is, the exceed slips of driving wheels are regulated by controlling the gun, and the relative slips of driving wheels are regulated by controlling the brake. The means of estimating the vehicle’s velocity used on the ABS was used for reference.2. The mathematic model of a four wheel drive vehicle was established. Establish a simple 、convenience、obvious、accurate systems mathematic model. In this paper, the model of the system was established and the state-space of the system was deduced.3. Made some researches of the ASR’s control algorithms. Then discuss the application of fuzzy control means on the ASR of four wheel drive vehicle. The gun controller and brake controller were designed.4. The simulation model was established under the circumstance of MATLAB/SIMULINK according to the established mathematic model. And three different road conditions were simulated and analysis. The results of simulation have shown that ASR can effectively regulated the driving wheels’ slippages, furthermore, the dynamic performance be improved. At the same time, it proved the control strategies were correct and the control algorithms were feasible.Keywords: acceleration slip regulation, four wheel drive; bond graph, simulation, fuzzy control目录摘要 (I)Abstract .............................................................................................................. I I第1章绪论 (1)1.1 课题背景及研究的目的和意义 (1)1.1.1 ASR的由来 (1)1.1.2 ASR的发展历程 (2)1.2 四轮驱动汽车的驱动防滑及其相关理论的发展 (4)1.2.1 四轮驱动原理 (4)1.2.2 四驱汽车的驱动防滑 (5)1.3 ASR在我国的现状及本课题研究的内容 (6)1.3.1 ASR在我国的发展现状 (6)1.3.2 ASR研究中的关键技术 (6)1.3.3 本课题的主要研究内容 (7)第2章ASR的基本原理及控制策略的研究 (9)2.1 ASR的基本原理及其基本结构 (9)2.2 四轮驱动汽车的ASR控制策略的研究 (10)2.2.1 控制实现的方法 (10)2.2.2 控制策略的选择 (11)2.2.3 控制量的选择 (13)2.3 模型汽车参数的确定 (13)2.4 本章小结 (14)第3章汽车运动模型建立 (15)3.1 轮胎力学模型 (15)3.2 制动系统模型 (17)3.3 滑转率的计算模型 (17)3.4 驱动力矩的分配模型 (18)3.5 汽车整车模型的建立 (20)3.6 本章小结 (21)第4章模糊控制器的设计 (23)4.1 模糊控制方法 (23)4.1.1 模糊控制的基本思想及模糊系统的构成 (23)4.1.2 模糊控制的基本原理 (24)4.2 模糊控制器的设计 (25)4.2.1 模糊控制器结构的设计 (25)4.2.2 精确量的模糊化 (25)4.2.3 输出信息的模糊判决 (29)4.3 模糊系统的建模 (30)4.4 本章小结 (30)第5章不同路面情况下的仿真及结果分析 (31)5.1 ASR的控制器模型 (31)5.2 仿真以及结果分析 (34)5.2.1 汽车模型的检验 (34)5.2.2 增加了驱动防滑系统的汽车模型 (36)5.2.3 以复杂输入参数进行仿真 (37)5.2.4 ASR控制下的仿真 (39)5.2.5 将路面情况设定为普通路面的仿真 (42)5.3 本章小结 (43)结论 (44)参考文献 (46)第1章绪论1.1 课题背景及研究的目的和意义1.1.1 ASR的由来汽车技术在近一个世纪以来得到了快速的发展和提高,目前,ABS 对于大众来说已经是一个很熟悉的名词了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在 驾 驶 员 、汽 车 和 环 境 三 者所 组 成 的 闭环 系 统 中 .汽车和环境 之间 的最基本联 系是轮胎和路 面之 间 的作 用 力 (包 括 纵 向力 和侧 向力 、法 向力 以及 回正 力 矩 、翻 转 力 矩 等 )如 图 1所 示 .汽 车 的行 驶 状 态 主 要 是 由轮 胎 和路 面 的 作 用 力 决 定 的 , 因此 驾 驶 员 对 汽车 的控制实质上是在控制轮胎 与路 面的作用 力.
中图分 类号 :U 463.5
文 献标 识码 :A
文章 编 号 :1672—402X(2011)02—0027—04
O绪 论
汽车驱 动 防滑 控制系 统f简 称 ASR)是 通过 自动 控制 驱动车轮 的驱动力矩 ,在汽 车驱动起步 、加速或 减 速 时 使 驱 动 轮 不 致 过 度 滑 转 ,以提 高 汽 车 的驱 动 性 、稳 定 性 及 安 全 性 能 的控 制 系 统 .
之 间 的 下 述关 系 ,称 为 滑转 率 A
AD=『( ,)/Vw]xlO0%.
(1)
在 附 着 状 况 良好 的 路 面 .车 辆 可 以获 得 较 好 的
附 着 状 况 和 驱 动 力 以及 正 常 的稳 定 性 与 操 纵 性 能 .
但 驱 动 轮 受 某 些 工 况 的影 响 ,从 而使 车 轮发 生 滑 转 .
汽 车 加 速 行 驶 时 .如 果 作 用 于 驱 动 轮 上 的驱 动 力 过 大 ,车 轮 将 发 生 滑 转 ,轮 速 加 快 ,车 身 速 度 由于 车轮滑 转而降低 ,车轮 处于既滚 动又滑转状 态.那么
车 轮 的 瞬 时 速 度 与 车 身 相 对 于 路 面 的 瞬 时 速 度
. 28 .
罗锡 才 黄 华 :汽车 驱动 防滑控 制 系统控 制算法 的研 究
第 2期
而 使 车 辆 丧 失 稳 定 性 与 正 常 操 纵性 . 驱 动 防 滑控 制 系统 不 仅要 能 自适应 控 制 驱 动
力 ,还 要 能 根 据 不 同 的路 面 附 着 系 数 采 用 不 同 的控 制方 式 ,而且要 求反应要迅速精 确.如何更好 识别路 面 附 着 系 数 达 到 最 佳 目标 滑 转 率 成 为 ASR研 究 难 点 .附 着 系数 大 小 取 决 于 车 轮 和地 面 本 身 的 状 况 及 二 者 之 间 的运 动 状 况 .由 大 量 的证 明 ,附 着 系 数 与 滑 转 率 之 间 存 在 一 定 的相 互 关 系 ,如 图 2所 示 .从 图 中 可 以看到 。滑转 率 随纵 向 附着系数 Js 的增 大而 增 大 ;当滑转率 达到 某一值 时 ,Is 达到 最大值 ;滑转率 继续增 加 , 反而 随之下 降 ;当滑转率 达到 100%时 , 车轮 发 生 纯 滑 转 .横 向 附 着 系 数 随 滑 转 率 的增 大 而 急 剧 减 小 .因此 ,要 控 制 滑 转 率 在 最 佳 目标 范 围 。 如 图 2中的 灰 色 区域 .此 处 得 驱 动 轮 的 较 大 ,同 时 也有 比较 大 的 ,不 仅 具 有 最 大 的 驱 动力 ,而 且 具 有 较大转 向力和防止侧滑 的侧 向力.
收 稿 日期 :2011-04—10 作者 简 介 :罗锡才 (1983一),男 ,广 东湛 江人 ,硕 士 ,广 东科 技 贸易职 业学 院助 教.研究 方 向 :汽车控 制系 统.
黄 华 (1981一),男 ,广 东河 源人 ,硕士 ,广 东科 技 贸易 职业 学 院讲师 .研究 方 向 :汽车 电子及 排放 .
(2)发 动 机 功 率 突 然 变 小 (仍 处 于 驱 动 工 况),由于 发 动 机 制 动 的影 响车 轮转 速 受 到 限 制 。在 附着 状 况 较 差 的 路 面 上 同样 会 产 生 驱 动 轮 滑 转 ,稳 定 性 与 操 纵 性 能 下 降.
(3)发动机 维持 正常 的动力 ,但 路面 附着 系数 的 值 突 然 变小 ,使 得 驱 动 轮 附着 力 随 之 突 然 变 小 而 驱 动力 瞬间超过 所决定 的附着力极 限 。驱动轮滑移 从
ASR的作用是 当汽车加 速时将滑动率控 制在一 定 的范 围内 。从 而防止驱 动轮快速滑 动.它 的功 能一 是提 高牵引力 :二是保 持汽 车的行驶稳定 .没有 ASR 的 汽 车 行 驶 在 低 附 着 路 面 上 加 速 时 驱 动 轮 容 易 打 滑 ,如 果 是 后 驱 的车 辆 容 易 甩 尾 ;如 果 是 前 驱 的 车辆 容 易 方 向失 控 带 有 ASR系 统 的 车 辆 ,能 够 在 驱 动 的 过程 中 ,特别是在起 步 、加速 、转弯 、左右路 面情况 不 同 产 生 的 左 右 轮 速 不 平 衡 等 状 况 …。有 效 地 防 止 驱 动 车 轮 发 生 过 分 滑 转 .保 持 车 辆 行 驶 的 稳 定 性 .转 向 操 纵 能力 以及 提 高 加 速 性 能 、安 全 性 .
摘 要 :介 绍计 算机 驱 动 防滑控 制 系统 的概念 、作 用 、工作 原理 及 控 制算 法 .在 低 附 着 系数 路 面上 基 于滑 转 率
门 限值 驱 动 防滑控 制 的计 算机 仿真 ,可为 汽车驱 动 防滑 控制 系统 的设 计提供 理论 依 据 .
关 键词 :驱 动 防滑控 制 系统 ;控制 算法 ;逻 辑 门限值 ;汽 车
从 动 轮 受 力 圈
驱动轮 ̄ -jiit
图 1 前 后 轮 受 力 分析
(1)车辆 发 动 机 输 出 功 率 突 然 加 大 ,驱 动 轮 转 矩 随之增加 而附着条件未 变 ,则 驱动轮 动力超过所 决 定 的 附 着 极 限 时 .此 时 车辆 驱 动 力 并 不 随发 动 机 功 率 加 大 而 成 正 比加 大 。车 轮 产 生 滑 转 ,同时 由 于驱 动 轮 滑 转 而 导 致 横 向 附 着 系 数 减 小 .轻 微 的干 扰 力 即可 使 车辆 丧 失 稳 定 性 和正 常操 纵 性 .
2011年 第 2期
广 东技 术师 范 学院 学报 (自然科 学 )
Journ al of Guangdong Polytechnic 来自ormal University
No.2.201 1
汽车驱动 防滑控 制 系统控 制算 法的研 究
罗锡 才 黄 华
(广 州科 技 贸易 职业 学 院 ,广 东 广州 510540)