夏米尔慢走丝290-500操作说明书
夏米尔基本操作演示

例如: G74X60.Y40.
5
例如: G90G75X90.Y20. 或 G91G75X60.Y-30
加工程式准备
本节开始介绍主要的G,M代码 (第3页)
G00 : 直线快速移动 (工件座标系)
语法格式: G00 X_ Y_ G00 U_ V_ ( MDI 状态或四轴联动锥度方式 )
机床执行命令时先两轴同时移动(45°)至其中一轴到达目标 值后再单独移动另一轴到达目标值。
( 例3 )
O003(SAMPLE2B.ISO) N01G92X0.Y0.I-25.J25. N02G01G51G42Y5.875T2. N03G02X0.Y-5.875I0.J-5.875 N04G02X0.Y5.875I0.J5.875 N05G01G40G50Y0. N06M30 %
( 例4 )
G11 : 选择TEC 或 WIR文件 (激活功能) G13 : 修改放电条件参数
常用的M代码 M00 : 无条件暂停 M01 : 有条件暂停 (由OSP参数控制) M02 : 程式结束 M23 : 转角策略无效 M24 : 转角策略有效 M27 : 断线保护策略无效 M28 : 断线(第一层)保护策略有效 M29 : 断线(第二层)保护策略有效 M50 : 自动剪线 M60 : 自动穿线 M30 : 程序结束,同时光标跳回程序初始段 M98 : 呼叫子程序 M99 : 程序循环结束(子程序结束段)
Charmilles Technology Robofil Training
(FI380/390/690 FIx40/SL/SLC/CC)
Present by Tony Wong
1
培训目标:
使操作员可以掌握基本的操作过程
一般的加工过程便是从图纸到成品的一个流程:
夏米尔慢走丝290,500操作说明书

夏米尔慢走丝操作说明书1.目的为正确操作线切割设备以维持线切割设备之精度及稳定性,延长其使用寿命,使线切割加工作业规范.标准化,而达到提升质量保证,提升加工效率的目的,以满足客户需求.2.适用范围适合于ROBOFIL290.ROBOFIL500型号之慢走丝.3.作业内容3.1 开机当电柜合闸通电的时候,数控恢复断电前的状态.如果想装软件,必须启动特别的启动屏幕,步骤如下:3.1.1 按通电开关.3.1.2 同时,按住控制板上任何一个键,直到显示启动屏幕.3.1.2.1 监控功能(MONITOR)是保留给CT维修服务人员的.3.1.2.2 装入功能(LOAD)用来装软件模块:系统.自诊断.3.1.2.3 初始化功能(INITALIZE)数控返回到初始状态(相当于装入软件的状态).3.1.2.4 继续功能(CONTINUE)用于退出特别启动屏幕,进入正常操作(象上面的操作一样,激活最后一个屏幕).3.2 安装软件3.2.1 系统软件一旦初始化菜单被激活,接着:* 把系统盘(磁盘A)插入驱动器A* 选择LOAD(F2)在装软件期间,磁盘驱动器二极管和屏幕右一指灯亮,数控显示装入过程的信息.装入结束后,NC在EXE方式下,以便执行装入下列文件的操作.(语言,CT-EXPERT.CAM- CT)3.2.2. 装入系统软件后,显示语言配置菜单:* 指明所需要的语言名,用RETURN确认* 根据指示插入所选择的语言盘* 按F1(寻找)输入必须的文件,设备即按所选语言配置.3.3 屏幕组织* 准备模式(PREPARATION) 符号: PREP 背景色: 绿色* 执行模式(EXECTION) 符号: EXE 背景色: 紫色* 信息模式(INFORMATION) 符号: INFO 背景色: 蓝色* 图形模式(GRAPIC) 符号: GRAPH 背景色: 橙色3.3.1 PREP 准备方式3.3.1.1 编辑器(EDITOR)该功能用来建立或修改ISO程序,控制程序PROFIL程序1): 寻找文本(FIND.TEXT)2): 寻找下一个(FIND NEXT)3): 块(BLOCK)4): 标记范围开始(MARK START>标记范围结束(MARK END)5): 保存文件(SAVE FILE)6): 退出(EXIT)3.3.1.2 CAM-CT* 准备ISO零件程序需要交替运用菜单功能与绘图功能.<此单节介绍略>3.3.1.3 专家系统(CT-EXPERT)* 这些程序可以手工或者由CT-EXPERT专家系统自动生成.* 与不使用CT-EXPERT专家系统相比,CT-EXPERT生成的TEC文件是分完整的.用一个TEC文件,一个ISO文件和一个命令文件就可能执行个加工操作.相反,当一个文件在CT-EXPERT中查询或者修改时,必须3.3.1.4 文件(FILES)* 本功能用于处理存储在(所用的)不同单元上的所有文件(选择一个单示其下的文件目录).* 可以对给定目录中的文件操作,或者从一个目录转到另一个目录.1): 拷贝(COPY)2): 删除(DELETE)3): 改变名称(RENAME)4): 显示(DESPLAY)5): 打印(PRINT)6): 转换单元(CHANGE UNIT)7): 格式化(INITIALISE)8): 退出(EXIT)3.3.1.5 表编辑(EDIT TABLES)1): TEC--规准表(工艺文件的定义)2): OFS--偏移量(补正量)3): VAR--变量(变量值代入)4): WIR--电极丝(使用线参数)3.3.2. EXECUTION执行方式* 配置机台* 调节多种参数* 运行测量功能* 在开始加式操作之前,执行所需要的测试3.3.2.1. 执行程序(PROGRAM EXECUTION)1). 切割(CUT)2). 空跑(DRY RUN)3). 检验(VERIFY)4). 绘图(DRAW ON SCREEN)5). 改变模式(CHANGE UNIT)3.3.2.2. 用户参数(USER PARAMETERS)1) HPA: 工件设度2) CLE: 补偿间隙3) SCF: 比例系数4) ROT: 工件旋转5) TFE: 补正量认可6) TRE: 斜度认可7) MIR,X: X镜像8) MIR,Y: Y镜像9) ZID: 下导头至平台距离10) ZSD: 上导头至工件顶部距离11) BLK: 单节执行12) CBC: 一个命令一个命令执行13) SIM: 加工与空跑转换14) TSIM: 模拟穿丝15) VSIM: 空跑速度16) BLD: 遇"/"跳过17) OSP: 选择性暂停18) ENG: 选择单位19) COE: 遇不错误继续执行20) ART: 断电后自动重启动21) ATH: 断丝后重穿丝22) CHRA: 选择表面精度的单位23) WIRE LN : 电极丝的消耗量24) MIOL: 测量允许的误差25) DVI: 缺省使用的源外设26) EXT: 缺省扩展27) DEIO: 电介液的导电率28) ATT: 开始切入路径的长度29) EAO: 遥控报警3.3.2.3: 电源参数(GENERAO PARAMETERS)* EL: 使用的电极丝号* PA: 工件的材料号1) FF: 暂时降低频率2) M : 切割方式3) V : 切割电压4) A : 脉冲宽度(放电时间)5) B : 休止时间6) S : 最大进给率7) AJ: 伺服基准平均电压8) TAC: 短脉冲时间9) IAL: 点火脉冲电流10) WS: 走丝速度11) WB: 线张力12) INJ: 水压13) ST: 保护策略3.3.2.4: 作图参数(DRAWING PARAMETERS) <略>3.3.2.5: 激活表(ACTIVE TABLES)1). TEC: 工艺表2). OFS: 补正值表3). VAR: 变量表4). PNT: 点表5). WIR: 电极丝准备表3.3.2.6: 测量(MEASURING)测量功能用于执行一系列操作,这些操作分成两类.* 机台调校测量* 电极丝相对于被加工工件位置的测量* 电极丝相对于被加工工件位置的测量1).找外轮廓中心(EXTERNAL CENTERING)2).找中心平面(MIDDLE) (寻沟槽)3).找拐角(CORNER)4).测角度(ALIGN ADGE)5).校孔ALIGN HOLES6).找边EDGE7).电极丝校垂直VERTICAL ALIGNMENT8).找中心CENTER9).工件校垂直PART ALIGNMERNT10).测ZID GUIDES SETUP11).喷嘴调节NOZZLE ADJUST12).垂直返回VERTICAL RETURN13).工件返回PART RETURN注意:1).一定要在加工状态下执行测量功能,例如,上导向器在低位置(工作位置),丝的张力正确(张力已校准,并且WB=精加工张力).水的离子浓度合适(即水电阻率要求范围)并保持恒温.2).被加工工件必须除油,去磁,去毛刺.3).每周一次,或者在每次加工高精度,斜度加工之前,特别是拆卸导向器后,要执行电极丝导向器设定功能.4).确信使用的电接触类型与所用电极丝的类型一致.5).开始测量前,要确认电极丝没有与被测量物短路.3.3.2.7. 手动(MANUAL)1).接触激活/不激活动力(TOUCH ACTIVE)2).返回断线点或轮廓(RETURN CONTOUR)3).电源参数(GENERATOR PARAMETERS)4).点动/连续方式(INCRE MENTAL MODE)5).接通/断开接触(SWITCH OFF CONTACT)6).激活/不激活(SWITCH OFF JET)7).软极限(SOFT LIMITS)3.3.2.8. 基准点(REFERENCE)机台配置的光栅尺每10MM有一个基准标记,任何一个基准标记都可以用来决定坐标轴的基准位置.3.3.2.9 服务(SERVICE)1).日期和时间(DATE HOUR)2).周期(CYCLES)3).语言(LANGUAGE)4).安全(SECURITY)3.3.3. INFO查询模式* 它汇集了所有涉及到机台配和加工操作监视的信息.3.3.3.1 观察画面(SURVEY)1). 机台坐标系(MACHINE)2). 工作坐标系(PART)3). 速度(SPEED)4). 压力(PRESURE)5). 去离子(DEIO)6). DO=0.000(补正值)3.3.3.2 加工画面(MACHINING)3.3.3.3 运行程序画面(RUNNING PROGRAMS)3.3.3.4 信息画面(MESSAGES)3.3.3.5 模态状况画面(MODAL STATE)3.3.3.6 空白画面(BLANK)3.3.3.7 参考点画面(REFERENCE)3.3.3.8 输入输出画面(INPUTS-OUTPUTS)3.3.3.9 断丝点画面(BREAKAGE POINTS)3.3.3.10 参考点画面(REFERENCE)3.3.3.11 输入输出画面(INPUTS-OUTPUTS)3.3.3.12 断丝点画面(BREAKAGE POINTS)3.3.3.13 服务画面(SERUICE)3.4 GRAPHIC 图形方式图形方式有一个图形页面,用于在操作者定义的平面上执行一个工件程序期间,在屏幕上显示电极丝行经的轨迹.3.5 常用命令词:3.5.1 CTA:用于机床坐标系的绝对加工移动.3.5.2 CTR:用于机床坐标系的相对加工移动.3.5.3 CPA:用于工件坐标系的绝对加工移动.3.5.4 CPR:用于工件坐标系的相对加工移动.3.5.5 GOH:用于移动Z轴,并根据新的工件高度H定位上导向器喷嘴的位置.3.5.6 GOP:把机床各轴移动到用SEP命令储存的点位.3.5.7 MOV:在机床坐标系中移动到所选定的数值.3.5.8 MVR:在机床坐标中相对移到所选定的数值.3.5.9 MPA:在工件坐标中移动到所选定的数值.3.5.10 MPR: 在工件坐标中相对移动到所选定的数值.3.5.11 REX:从当前规准表中取规准,传输给加工电源,参数根据工件高度H设定.3.5.12 SEP:点记忆.3.5.13 ZCL:时间计数器清靃.3.5.14 SMA:设定机床坐标系的X轴和Y轴坐标.3.5.15 SPA::设定工件坐标系的X轴和Y轴坐标.3.5.16 SPG:用来执行一个工件程序文件.3.5.17 TEC:用于选择含有即将使用的工艺规准表文件.3.5.18 CLS:清屏幕显示的图形页.3.5.19 CPY:用于拷贝原文件到另一前设,可以换名字.3.5.20 DLF:删除文件.3.5.21 LOOP:返回命令程序起点,并执行一定次数.3.5.22 SWA:存储电极丝按工作表面手动校直位置.3.6 加工前检查清单:3.6.1«电介液»功能检查:3.6.1.1过滤:确认过滤网压力表读数是否在设定范围,观察导电块冷却区是否有水浸泡.3.6.1.2 去离子度:15±2U.CM3.6.1.3 温度:20±0.53.6.2«腐蚀»功能的检查:3.6.2.1 导电块:是否被水浸泡,表面磨损情况及安装质量.3.6.2.2 接地电缆和编织线:各电缆连接是否牢固.3.6.3 «电极丝更换»的检查:3.6.3.1 丝的种类(直径.材料)3.6.3.2 走丝是否正常3.6.3.3 如果安装新的丝轴,检查丝轴的质量.丝是否有氧化.3.6.3.4 丝的校直和退火.3.6.4工件安装检查:深圳培训网3.6.4.1 夹治具的清洗.3.6.4.2 工件去毛刺.清洁.3.6.4.3 工件装夹.3.6.4.4 工件的调整.3.6.5参数调整和检查:3.6.5.1 绝对参考点找取.3.6.5.2 在更换(重新装)导向器之后,进行«导向器»设定循环.3.6.5.3 在更换喷嘴或更换导向之后,运行«喷嘴调节»过程.3.6.5.4 如果没有在命令程序内设定丝参数,就要在程序一开始加入该设定.3.6.5.5 在«EXE»方式下检查«用户»和«电源»参数什是否在工件切割时要求的参数值.3.6.5.6 在丝准备表内选择丝文件.(.WIR)3.6.5.7 选择需要的工艺文件.(.TEC)3.6.5.8 选择用户偏移文件.(USER.OFS)3.6.6程序运行.3.6.7开始切割.。
慢走丝操作规程

文件编号:C-A-P-12
版次号:A/0
「慢走丝操作规程」
第1页共1页
1.0目的
明确加工时慢走丝的操作规定,严格按规定流程操作,防止因操作不当而损坏机床或人员伤残等不良现象/事故发生。
2.0应用范围
本公司所用使用慢走丝的操作人员。
3.0定义
参照有关慢走丝制作规定。
4.0参考资料
SMP-B07 「基础设施和.1夹工件要稳固。机床运转时,不得调整、测量工件和改变装夹方式,以防手触及工件碰伤手指
5.2机床示完全停止前,不能用手去触及机头和工件,以防被电击伤
5.3卸工件时,应将工作台退到安全位置,使用扳手紧固工件时,用力方向应掌握好,以防扳手打滑时撞到工件或工夹具
5.4加工中不要弄好挡水布,以防水溅出来。
6.0操作说明
6.1 开机前作业员必须明晰的“注意”标识区域。
6.2 开动机床前,须先对慢走丝日常点检。
6.3 维护人员要经常检查机床油路系统,要及时修理。
6.4 机床出现异象,如异声,异味时,应立即停机,并及时上报。
6.5 对于操作人员身体或精神状况不好而可能影响正常机器操作时,必须及时向组长以上管理人员报告,以免生产不良品或造成安全事故。
5.5加工的工件有任何疑问,都必须在机床停稳后进行
5.6工作台上禁止放置工量具、工件及其它杂物。
5.7工作台与升降台移动前,要检查有无极间丝挂住,则采取措施避免。
5.8工具和螺丝要吹干水放到指定位置。
5.9工作完毕后应关闭电源,清扫机床。
5.10人员在作业前必须认真阅览《慢走丝操作规程》严禁违规操作
承认
审核
作成
修
订
经
历
修订日期
慢走丝

线张力
Wire tension
线速
Wire feed
垂直度
Perpendicularity
锥度
Taper
斜度
Oblique
过滤方式
Filtering element
亚特
?
美溪
?
杜芬
?
联盛
?
文档冲亿季,好礼乐相随 uang Technoloies
编程系统
Esprit
无中文名你能取一个
M
asterCam
无中文名
Ycut
立先
Wpcam
统羸
机台性能:
最大工件尺寸
Max workpiece size
半自动穿线
Semi-auto
thread
自动穿线
Automatic thread
驱动器
Driver
伺服马达
Servo motor
光栅尺位置检出装置
Liner scale Positioning
2.4 空格后,选择好文件的输出路径。按保存。
2.5 程序便自动进行模拟。如想让其暂停可按“空格”或“鼠标右键”。
2.6 最后把所保存的文件*.*.ISO同C:/TWINCAD/*.*.CMD文件COPY到机床上并运行*.*.CMD程序便可以。
3 模式解析
3.1部分斜度/斜度加工:
3.1.1画完图形后,进入后置处理“WTCAM”。在路径设置后进入D:其他细节--T:斜度,输入用户需要的斜度,然后手动选择该斜度图形的边。不同的边斜度选定只要重新在T:斜度 中输入新的斜度既可。
夏米尔慢走丝工艺参数

夏米尔慢走丝工艺参数
夏米尔慢走丝是一种高效的线切割加工技术,广泛应用于各种小型化零件的超精加工,如航空、国防、医疗器械、半导体等领域。
以下是夏米尔慢走丝工艺的一些主要参数:
1. 丝径:夏米尔慢走丝的丝径通常小于0.02 mm,这使得它能够实现高精度的加工。
2. 超高精度:夏米尔慢走丝超高精度加工可以达到Ra0.04μm的纳米级表面粗糙度,具备亚微量级的精确定位能力。
3. 高速加工:夏米尔慢走丝线切割放电加工技术具有强大的功能,能满足高速加工的需求,同时保持工件表面的一致性。
4. 应用领域:夏米尔慢走丝适用于模具制造、航空、医药以及其他零件生产行业中复杂件与大型件的加工。
5. 灵活性:夏米尔慢走丝具有灵活的应用性,运行成本低,适用于任何电加工车间。
6. 控制系统:夏米尔慢走丝线切割机床采用高静力学刚性的机床结构,配备先进的测量系统和控制单元,确保加工精度和稳定性。
7. 型号规格:夏米尔慢走丝有不同的型号和规格,如AC Progress VP2和
AC Progress VP3等,适用于不同加工需求和场景。
8. 价格:夏米尔慢走丝的价格因型号、规格和配置的不同而有所差异。
您可以在阿里巴巴、京东等平台上查找相关报价和供应商。
需要注意的是,具体工艺参数可能会因设备型号、加工材料和客户需求等因素而调整。
在实际应用中,请根据具体情况优化工艺参数以获得最佳加工效果。
夏米尔慢走丝290-500操作说明书
夏米尔慢走丝操作说明书1.目的为正确操作线切割设备以维持线切割设备之精度及稳定性,延长其使用寿命,使线切割加工作业规范.标准化,而达到提升质量保证,提升加工效率的目的,以满足客户需求.2.适用范围适合于ROBOFIL290.ROBOFIL500型号之慢走丝.3.作业内容3.1 开机当电柜合闸通电的时候,数控恢复断电前的状态.如果想装软件,必须启动特别的启动屏幕,步骤如下:3.1.1 按通电开关.3.1.2 同时,按住控制板上任何一个键,直到显示启动屏幕.3.1.2.1 监控功能(MONITOR)是保留给CT维修服务人员的.3.1.2.2 装入功能(LOAD)用来装软件模块:系统.自诊断.3.1.2.3 初始化功能(INITALIZE)数控返回到初始状态(相当于装入软件的状态).3.1.2.4 继续功能(CONTINUE)用于退出特别启动屏幕,进入正常操作(象上面的操作一样,激活最后一个屏幕).3.2 安装软件3.2.1 系统软件一旦初始化菜单被激活,接着:* 把系统盘(磁盘A)插入驱动器A* 选择LOAD(F2)在装软件期间,磁盘驱动器二极管和屏幕右一指灯亮,数控显示装入过程的信息.装入结束后,NC在EXE方式下,以便执行装入下列文件的操作.(语言,CT-EXPERT.CAM-CT)3.2.2. 装入系统软件后,显示语言配置菜单:* 指明所需要的语言名,用RETURN确认* 根据指示插入所选择的语言盘* 按F1(寻找)输入必须的文件,设备即按所选语言配置.3.3 屏幕组织* 准备模式(PREPARATION) 符号: PREP 背景色: 绿色* 执行模式(EXECTION) 符号: EXE 背景色: 紫色* 信息模式(INFORMATION) 符号: INFO 背景色: 蓝色* 图形模式(GRAPIC) 符号: GRAPH 背景色: 橙色3.3.1 PREP 准备方式3.3.1.1 编辑器(EDITOR)该功能用来建立或修改ISO程序,控制程序PROFIL程序1): 寻找文本(FIND.TEXT)2): 寻找下一个(FIND NEXT)3): 块(BLOCK)4): 标记范围开始(MARK START>标记范围结束(MARK END)5): 保存文件(SAVE FILE)6): 退出(EXIT)3.3.1.2 CAM-CT* 准备ISO零件程序需要交替运用菜单功能与绘图功能.<此单节介绍略>3.3.1.3 专家系统(CT-EXPERT)* 这些程序可以手工或者由CT-EXPERT专家系统自动生成.* 与不使用CT-EXPERT专家系统相比,CT-EXPERT生成的TEC文件是分完整的.用一个TEC文件,一个ISO文件和一个命令文件就可能执行个加工操作.相反,当一个文件在CT-EXPERT中查询或者修改时,必须3.3.1.4 文件(FILES)* 本功能用于处理存储在(所用的)不同单元上的所有文件(选择一个单示其下的文件目录).* 可以对给定目录中的文件操作,或者从一个目录转到另一个目录.1): 拷贝(COPY)2): 删除(DELETE)3): 改变名称(RENAME)4): 显示(DESPLAY)5): 打印(PRINT)6): 转换单元(CHANGE UNIT)7): 格式化(INITIALISE)8): 退出(EXIT)3.3.1.5 表编辑(EDIT TABLES)1): TEC--规准表(工艺文件的定义)2): OFS--偏移量(补正量)3): VAR--变量(变量值代入)4): WIR--电极丝(使用线参数)3.3.2. EXECUTION执行方式* 配置机台* 调节多种参数* 运行测量功能* 在开始加式操作之前,执行所需要的测试3.3.2.1. 执行程序(PROGRAM EXECUTION)1). 切割(CUT)2). 空跑(DRY RUN)3). 检验(VERIFY)4). 绘图(DRAW ON SCREEN)5). 改变模式(CHANGE UNIT)3.3.2.2. 用户参数(USER PARAMETERS)1) HPA: 工件设度2) CLE: 补偿间隙3) SCF: 比例系数4) ROT: 工件旋转5) TFE: 补正量认可6) TRE: 斜度认可7) MIR,X: X镜像8) MIR,Y: Y镜像9) ZID: 下导头至平台距离10) ZSD: 上导头至工件顶部距离11) BLK: 单节执行12) CBC: 一个命令一个命令执行13) SIM: 加工与空跑转换14) TSIM: 模拟穿丝15) VSIM: 空跑速度16) BLD: 遇"/"跳过17) OSP: 选择性暂停18) ENG: 选择单位19) COE: 遇不错误继续执行20) ART: 断电后自动重启动21) ATH: 断丝后重穿丝22) CHRA: 选择表面精度的单位23) WIRE LN : 电极丝的消耗量24) MIOL: 测量允许的误差25) DVI: 缺省使用的源外设26) EXT: 缺省扩展27) DEIO: 电介液的导电率28) ATT: 开始切入路径的长度29) EAO: 遥控报警3.3.2.3: 电源参数(GENERAO PARAMETERS)* EL: 使用的电极丝号* PA: 工件的材料号1) FF: 暂时降低频率2) M : 切割方式3) V : 切割电压4) A : 脉冲宽度(放电时间)5) B : 休止时间6) S : 最大进给率7) AJ: 伺服基准平均电压8) TAC: 短脉冲时间9) IAL: 点火脉冲电流10) WS: 走丝速度11) WB: 线张力12) INJ: 水压13) ST: 保护策略3.3.2.4: 作图参数(DRAWING PARAMETERS) <略>3.3.2.5: 激活表(ACTIVE TABLES)1). TEC: 工艺表2). OFS: 补正值表3). VAR: 变量表4). PNT: 点表5). WIR: 电极丝准备表3.3.2.6: 测量(MEASURING)测量功能用于执行一系列操作,这些操作分成两类.* 机台调校测量* 电极丝相对于被加工工件位置的测量* 电极丝相对于被加工工件位置的测量1).找外轮廓中心(EXTERNAL CENTERING)2).找中心平面(MIDDLE) (寻沟槽)3).找拐角(CORNER)4).测角度(ALIGN ADGE)5).校孔ALIGN HOLES6).找边EDGE7).电极丝校垂直VERTICAL ALIGNMENT8).找中心CENTER9).工件校垂直PART ALIGNMERNT10).测ZID GUIDES SETUP11).喷嘴调节NOZZLE ADJUST12).垂直返回VERTICAL RETURN13).工件返回PART RETURN注意:1).一定要在加工状态下执行测量功能,例如,上导向器在低位置(工作位置),丝的张力正确(张力已校准,并且WB=精加工张力).水的离子浓度合适(即水电阻率要求范围)并保持恒温.2).被加工工件必须除油,去磁,去毛刺.3).每周一次,或者在每次加工高精度,斜度加工之前,特别是拆卸导向器后,要执行电极丝导向器设定功能.4).确信使用的电接触类型与所用电极丝的类型一致.5).开始测量前,要确认电极丝没有与被测量物短路.3.3.2.7. 手动(MANUAL)1).接触激活/不激活动力(TOUCH ACTIVE)2).返回断线点或轮廓(RETURN CONTOUR)3).电源参数(GENERATOR PARAMETERS)4).点动/连续方式(INCRE MENTAL MODE)5).接通/断开接触(SWITCH OFF CONTACT)6).激活/不激活(SWITCH OFF JET)7).软极限(SOFT LIMITS)3.3.2.8. 基准点(REFERENCE)机台配置的光栅尺每10MM有一个基准标记,任何一个基准标记都可以用来决定坐标轴的基准位置.3.3.2.9 服务(SERVICE)1).日期和时间(DATE HOUR)2).周期(CYCLES)3).语言(LANGUAGE)4).安全(SECURITY)3.3.3. INFO查询模式* 它汇集了所有涉及到机台配和加工操作监视的信息.3.3.3.1 观察画面(SURVEY)1). 机台坐标系(MACHINE)2). 工作坐标系(PART)3). 速度(SPEED)4). 压力(PRESURE)5). 去离子(DEIO)6). DO=0.000(补正值)3.3.3.2 加工画面(MACHINING)3.3.3.3 运行程序画面(RUNNING PROGRAMS)3.3.3.4 信息画面(MESSAGES)3.3.3.5 模态状况画面(MODAL STATE)3.3.3.6 空白画面(BLANK)3.3.3.7 参考点画面(REFERENCE)3.3.3.8 输入输出画面(INPUTS-OUTPUTS)3.3.3.9 断丝点画面(BREAKAGE POINTS)3.3.3.10 参考点画面(REFERENCE)3.3.3.11 输入输出画面(INPUTS-OUTPUTS)3.3.3.12 断丝点画面(BREAKAGE POINTS)3.3.3.13 服务画面(SERUICE)3.4 GRAPHIC 图形方式图形方式有一个图形页面,用于在操作者定义的平面上执行一个工件程序期间,在屏幕上显示电极丝行经的轨迹.3.5 常用命令词:3.5.1 CTA:用于机床坐标系的绝对加工移动.3.5.2 CTR:用于机床坐标系的相对加工移动.3.5.3 CPA:用于工件坐标系的绝对加工移动.3.5.4 CPR:用于工件坐标系的相对加工移动.3.5.5 GOH:用于移动Z轴,并根据新的工件高度H定位上导向器喷嘴的位置.3.5.6 GOP:把机床各轴移动到用SEP命令储存的点位.3.5.7 MOV:在机床坐标系中移动到所选定的数值.3.5.8 MVR:在机床坐标中相对移到所选定的数值.3.5.9 MPA:在工件坐标中移动到所选定的数值.3.5.10 MPR: 在工件坐标中相对移动到所选定的数值.3.5.11 REX:从当前规准表中取规准,传输给加工电源,参数根据工件高度H设定.3.5.12 SEP:点记忆.3.5.13 ZCL:时间计数器清靃.3.5.14 SMA:设定机床坐标系的X轴和Y轴坐标.3.5.15 SPA::设定工件坐标系的X轴和Y轴坐标.3.5.16 SPG:用来执行一个工件程序文件.3.5.17 TEC:用于选择含有即将使用的工艺规准表文件.3.5.18 CLS:清屏幕显示的图形页.3.5.19 CPY:用于拷贝原文件到另一前设,可以换名字.3.5.20 DLF:删除文件.3.5.21 LOOP:返回命令程序起点,并执行一定次数.3.5.22 SWA:存储电极丝按工作表面手动校直位置.3.6 加工前检查清单:3.6.1«电介液»功能检查:3.6.1.1过滤:确认过滤网压力表读数是否在设定范围,观察导电块冷却区是否有水浸泡.3.6.1.2 去离子度:15±2U.CM3.6.1.3 温度:20±0.53.6.2«腐蚀»功能的检查:3.6.2.1 导电块:是否被水浸泡,表面磨损情况及安装质量.3.6.2.2 接地电缆和编织线:各电缆连接是否牢固.3.6.3 «电极丝更换»的检查:3.6.3.1 丝的种类(直径.材料)3.6.3.2 走丝是否正常3.6.3.3 如果安装新的丝轴,检查丝轴的质量.丝是否有氧化.3.6.3.4 丝的校直和退火.3.6.4工件安装检查:3.6.4.1 夹治具的清洗.3.6.4.2 工件去毛刺.清洁.3.6.4.3 工件装夹.3.6.4.4 工件的调整.3.6.5参数调整和检查:3.6.5.1 绝对参考点找取.3.6.5.2 在更换(重新装)导向器之后,进行«导向器»设定循环.3.6.5.3 在更换喷嘴或更换导向之后,运行«喷嘴调节»过程.3.6.5.4 如果没有在命令程序内设定丝参数,就要在程序一开始加入该设定.3.6.5.5 在«EXE»方式下检查«用户»和«电源»参数什是否在工件切割时要求的参数值.3.6.5.6 在丝准备表内选择丝文件.(.WIR)3.6.5.7 选择需要的工艺文件.(.TEC)3.6.5.8 选择用户偏移文件.(USER.OFS)3.6.6程序运行.3.6.7开始切割.。
夏米尔慢走丝工艺参数

夏米尔慢走丝工艺参数全文共四篇示例,供读者参考第一篇示例:夏米尔慢走丝工艺是一种高精度加工工艺,适用于制造精密零部件和复杂形状的零件。
本文将从慢走丝工艺的基本原理、工艺参数及优势等方面进行介绍,希望能为读者提供一些参考。
夏米尔慢走丝工艺是一种使用线切割机床进行切割加工的工艺,通过电脉冲将工件表面的金属材料剥离下来,从而实现对工件进行加工的目的。
其工作原理是利用一根细丝作为电极,在脉冲电流的作用下,将工件材料熔化并冷凝成小颗粒,最终被冲击气流冲走,实现切割加工。
在夏米尔慢走丝工艺中,有一些重要的工艺参数需要进行调整和控制,以确保加工效果和加工质量。
其中包括放电电流、放电电压、脉冲宽度、工作液流量、工作速度等参数。
这些参数的设定将直接影响到加工速度、加工精度以及电极磨损程度等方面。
放电电流是夏米尔慢走丝加工中最为关键的参数之一,它的大小将直接影响到放电火花的能量和加工效果。
通常情况下,放电电流越大,放电火花的能量就越强,加工效率也就越高。
但是要注意的是,放电电流过大会导致加工表面粗糙度增大和电极磨损加剧的问题。
工作液流量是指在加工过程中用于冷却和冲洗工件表面的液体流量,其大小将直接影响到加工热量的排除和加工效果。
合理的工作液流量能够有效地降低加工温度和冷却工件,从而提高加工质量和延长电极寿命。
工作速度是指慢走丝机床在进行加工时的运行速度,其大小将直接影响到加工精度和加工效率。
通常情况下,工作速度越快,加工效率就越高,但同时也会影响到加工精度。
因此需要根据具体的加工要求和工件的材料性能来合理地选择工作速度。
各种参数的调整和控制需要经过多次试验和实践,才能找到最佳的加工参数组合。
在实际加工过程中,工艺师需要根据工件的要求和材料特性来进行针对性的调整,以达到最优的加工效果。
夏米尔慢走丝工艺具有高精度、高效率、适用性广等优点,在航空航天、汽车、电子、医疗器械等领域得到了广泛的应用。
通过不断的研究和实践,相信夏米尔慢走丝工艺在未来会有更广阔的发展空间,为制造业的发展注入新的活力。
夏米尔慢走丝作业指导书

株洲OKE硬质合金有限公司慢走式线切割工作岗位作业指导书1范围本作业指导书规定了模具车间夏米尔线切割工作岗位的操作,维护与保养和设备故障与分析基本操作规程。
本作业指导书适用于阿奇夏米尔FI240CCS慢走式线切割工作岗位。
2规范性引用文件3本作业指导书的组成技术参数操作规程维护与保养故障与排除4技术参数技术指标单位数值技术指标单位数值X轴行程mm 350 Y轴行程mm 220Z轴行程mm 220 U轴行程mm 350V轴行程mm 220 加工倾斜角度度 ±30定位精度μm 4 重复定位精度μm 3反向间隙μm 2 100毫米圆度精度μm <3最大加工速度mm2/min 500 最大工件尺寸mm 1000×550 台面尺寸mm 680×450 可侵泡最高工件高度mm 220最大工件质量kg 750 加工速度mm2/min 500最佳粗糙度um Ra0.2 标准丝直径mm 0.25丝架重量kg 0.8 走丝速度m/min 0.2-15最大穿丝高度mm 220 最小穿丝直径mm 0.6水温控制度±1最高环境温度度30总功率kw 10 输入电压v 400功率因数0.8 机床总高mm 2000机床总长mm 2050 机床总宽mm 2020机床毛重kg 3210 机床纯重kg 24505操作规程5.1工件准备5.1.1操作人员达到岗位后检查水、电、气,确定设备包括冷水机处于正常待机状态。
5.1.2按照图纸要求正确选用工装夹具,清洁待加工件表面,正确安装夹具,工件安装牢固。
确认工件安装在机床有效行程范围内。
5.2程序准备5.2.1仔细阅读图纸,在电脑上绘制几何图形,校验几何图形。
5.2.2确认程序起始位置,确认多工位程序位置与待加工件位置一致性。
5.2.3根据工艺要求确定偏移量,电参数、非电参数。
5.2.4根据图纸和工艺要求编制修整量。
5.2.5编制好程序经后处理传送到机床。
慢走丝之统赢操作说明及后处理修改说明
慢走丝之统赢操作说明及后处理修改说明相关搜索:后处理, 慢走NC程式中出現的補正編號是由變數90的控制,可以將#8更換為#90﹐Variable 90 = H20,abs,modal,integer,init/0.;Offset code :;;Offset Compensation Number#8與#90的區別,(根據客戶需要采用變數控制)#8的補正編號是由系統自動累加1,從H01﹒H02﹒H03﹒﹒﹒﹒H99﹒﹒﹒#90的補正編號是由DBF檔案資料庫與條件組補正編號控制﹐變動性較#8大﹐可以這選圖元時隨時改變補正編號#90補正編號可參考WPCAM﹒DBF檔案資料原Variable D = H10,init/0,not_modal,ex:H01,H02修改后Variable D = D10,init/0,not_modal,ex01,D02(也可以修改成其他字母代碼全世界慢走丝,中走丝,快走丝“常用中英词汇表”相关搜索:词汇表, 全世界, 慢走慢走丝名三菱Mitsubishi 牧野Makino 兄弟Brother 日立Hitachi 西部Seibu 沙迪克Sodlck法那科,富士通。
Fanuc 积柏时Japax 欧安?夏米尔洽米尔Charmiles 阿奇Agie GF阿奇夏米尔GF Agie-Charmills庆鸿Chmer 徕通Legend 京美Centech 美新?健升?秀丰?亚特?美溪?杜芬?联盛?三光科技Sanguang Technoloies 汉川?三光沙迪克Sanguang Sodlck 北京阿奇?中特?宝码?上海通用?安德?编程系统Esprit 无中文名你能取一个MasterCam 无中文名Ycut 立先Wpcam 统羸机台性能:最大工件尺寸Max workpiece size 最大工件重量Max workpiece weight X和Y轴行程X/Y Travel U,Vl轴行程U,VTreavl Z轴行程Z Travel 机械重量Net Wight机头移动距离Machine Head movement 电极直径Electrode pipe diameter 加工液容量Fluid capacity 加工液Dielectric fluid加工电源Input power 最大加工电流Max machineing current 机械高度Machine height 机台尺寸Machine size机器特性Features 穿线方法Thread type 半自动穿线Semi-auto thread 自动穿线Automatic thread驱动器Driver 伺服马达Servo motor 光栅尺位置检出装置Liner scale Positioning 线张力Wire tension 线速Wire feed垂直度Perpendicularity 锥度Taper 斜度Oblique 过滤方式Filtering element 纯水供液系统Pure water supply unit离子交换Ionexchange 冷却系统Coolant system 控制轴Axis control 最小设定单位Min setting 最小移动单位Min movment程序储存Program storage 轴旋转Axis rotating 镜像Mirror 线径补偿Offset 倍率scale 自动园角corner path转角暂停corner pause 加工电源Power supply 放电回路Discharge loop 电流current 停止时间Off time 放电时间On time辅助电流Auxiliary current 辅助停止时间Auxiliary offtime 伺服电压Servo Voltage 开路电压Open Voltage 精修功能Fine finish起始点回归Start point return 暂停点回归Hold point return 路径跟踪Path trcing 路径倒走Path retrace 起始点start point机台重置Restart 空跑Dry run 单节运行Single block execution 选择性停止Optional stop 斜度加工Taperdischarge选择性暂停Optional skip 呼叫子程序Subprogram 在线帮助On Line help 自动垂直校正Auto perpendicularity rectify自动寻边Auto edging 软件机台极限设定Soft limitsetting 自动找园中心Self centering 自动找外园中心Self O,Pcertering自动找沟Self centering in slit 座标Coordinate 参考点设定Reference point set 切割长度显示Cutting length display 回归参考点Home return加工时间计算working timer 切割速度显示Cutting speeddisplay 单节模拟Single block simulation 转角路径控制Cornering path control加工警告信息Alam message 喷水FW 浸水SW 材质Material 电极丝抗拉强度Wire tensile strength 廷伸率Elongation线芯材料core material 线轴Spool 转角内侧cornerinner 转角外侧corner outer 硬线Hard wire 软线Soft wire配合间隙自由配合Free fit 轻压配合Finger press fit 压入配合Handfit 松配合Rough fit 压配合Press fit 推入配合Push fit 滑动配合Easy push fit 轻转配合Easy running fit 轻滑配合Easyslide fit 精确配合Exact fit紧动配合Close running 特小间隙配合Close sliding fit 紧滑配合Close working fit 公差Tolerance 偏差Deviation火花位Wire overburn 修刀余量Stock to leave 总切割量Total offset 线切割速度Feedrate 电极丝半径Wire radius相关搜索:夏米尔, 代码Aa 锥度 A____ (角度)Cc 辅助平面旋转角度 C_____(角度)Ee 加工模式的选择 E____(正整数)Ff 多少秒闭锁时间 F____(常数)Hh 工件的厚度 H____(常数)Rr 基准面与辅助平面之间的距离 R____(常数)Ww 基准面与下部表面之间的距离G27 正常模式[取消模式 G28,G29,G30和G32]G28 锥形模式,旋转主轴类型[不变角]G29 尖角的锥形模式G30 恒定半径的锥形模式G32 扭转模式的约定和定义M03 起用电极丝进给M05 停用电极丝进给M06 自动穿丝M07 起用上部冲洗M08 起用下部冲洗M09 停用上部与下部冲洗M12 自动线切割M20 起用加工M21 停用加工多种慢走丝通用代码G代碼G00 快速移動G00 X___Y___U_ __V___G01 直線加工G01 X___Y___U_ __V___G02 順時針圓弧加工G02 X___Y___ I___ J____ G03 逆時針圓弧加工G03 X___Y____I___J____ G04G40 補正取消G40 X____Y____ G41 向左補正G41X____Y____G42 向右補正G42 X____Y____ G90 絕對值數據模式G90 (指定絕對坐標值)G91 相對值數據模式G91 (指定相對坐標值)G92 程式原點數據模式G92 X___Y____I____J____U____V ____M代碼M00 無條件停止工作M00 (當程式執行到M00單節時,機台將自動停止)M01 選擇性停止工作M01 (如果M01STOP按鍵按亮時,和M00功能相同)M02 程式結束 M02 (指定主程式結束)三菱(MITSU)線割機台代碼A 錐度 A____ (角度)L 程式編號L_____(正整數)N 程式中加工孔號N_____(正整數)R 圓弧半徑R_____(常數)K 旋轉角度K_____(角度)S 縮放比例S_____(常數)H 補正編號H_____(常數)E 加工條件E_____(正整數) F 加工速度F_____(正數)G22 呼叫副程式G22L__(正整數)G23 返回主程式G23G87 主程式與副程式圓角設定G87G88 自動化清角G88G89 取消自動化清角G89M20 自動穿線M20 M21 自動剪線M21 M80 噴水打開M80 M81 噴水關閉M81 M82 送線開始M82 M83 送線結束M83 M84 放電開始M84 M85 放電結束M85 M90 最適利進給打開M90M91 最適利進給結束M91慶鴻線割機台代碼A 錐度 A____ (角度)L(O) 程式編號L_____(正整數)N 程式中加工孔號N_____(正整數)R 圓弧半徑R_____(常數)K 旋轉角度K_____(角度)H(D) 補正編號H_____(常數)E(S) 加工條件E_____(正整數) F 加工速度F_____(正數)G22 呼叫副程式G22L__(正整數)G23 返回主程式G23G87 主程式與副程式圓角設定G87G94 定速切割G94 G95 伺服切割G95 M20 自動穿線M20 M21 自動剪線M21 M80 噴水打開M80 M81 噴水關閉M81 M82 送線開始M82 M83 送線結束M83 M84 放電開始M84 M85 放電結束M85 M90 最適利進給打開M90M91 最適利進給結束M91M98 呼叫副程式M98L(P)__ (正整數)M99 返回主程式M99沙迪克(SODICK) 線割機台代碼G05 X軸鏡象G05 G06 Y軸鏡象G06 G07 Z軸鏡象G07 G08 X.Y軸交換G08G09 取消鏡象与軸交換G09G26 圖形旋轉打開G26K___(角度) G27 圖形旋轉取消G27G50 取消錐度 G50 G51 向左側傾斜 G51G52向右側傾斜G52G74 打開四軸補正G74G75 關閉四軸補正G75G81 回歸机械原點G81G82 X或者Y方向分中G82G84 自動測垂直 G84X-G97 設定所有坐標系歸零G97XYT80 送線打開T80 T81 送線關閉T81 T82 加工液打開 T82T83 加工液關閉 T83T84 泵流打開 T84T85 泵流關閉 T85T86 噴流打開T86 T87 噴流關閉T87 T88 浸油加工T88 T89 噴水加工T89 T94 浸水加工T94 M05 忽視接触(短路)感知 M05M06 不放電M06M98 呼叫副程式M98L(P)__ (正整數)M99 返回主程式M99法蘭克(富士通FANUC) 線割機台代碼G10 設定補正值或者加工條件 G10P__R__(補正值設定)G10P__X__Y__Z__U__V__W__I__J_K_(加工條件設定 )G48 轉角R机能打開G48G49 轉角R机能關閉G49G50 取消錐度 G50X__Y__G51 向左側傾斜 G51 X__Y__ G52 向右側傾斜 G52 X__Y__G94 定速切割G94X__Y__F__G95 伺服切割G95X__Y__夏米爾(CHARMILL) 線割機台代碼Aa 錐度A_ ___ (角度)Cc 輔助平面旋轉角度C_____(角度)Ee 加工模式的選擇 E____(正整數)Ff 多少秒閉鎖時間 F____(常數)Hh 工件的厚度H____(常數)Rr 基准面与輔助平面之間的距离 R____(常數)Ww 基准面与下部表面之間的距离G27 正常模式[取消模式 G28,G29,G30和G32]G28 錐形模式,旋轉主軸類型[不變角]G29 尖角的錐形模式G30 恒定半徑的錐形模式G32 扭轉模式的約定和定義M03 起用電极絲進給M05 停用電极絲進給M06 自動穿絲M07 起用上部沖洗M08 起用下部沖洗M09 停用上部與下部沖洗M12 自動線切割M20 起用加工M21 停用加工还有很多!没有补全慢走丝线切割系统特征1.两平面,两轴直线,圆弧插补。
夏米尔慢走丝指令清单
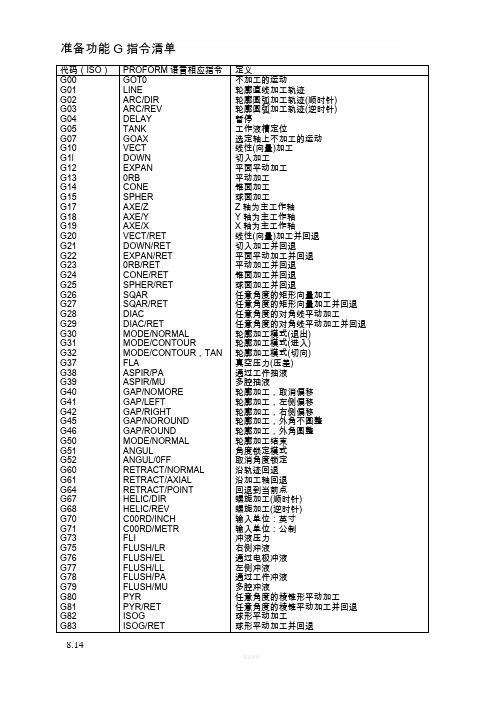
准备功能G指令清单8.14GOO 不加工的运动句法G00<Xx><Yy><Zz><Cc><Rr>定义四轴联动,以线性插补方式运动到指定点(X、Y、Z、C)。
有C轴运动时,Rr表示电极相对于其中心的最大半径。
<Rr>不改变几何形状,但改善“C”轴伺服性能等价于PROFORM:GOTO/<,X,x><,Y,y><,Z,z><,C,c><,R,r>例GO1 轮廓直线加工轨迹句法G01<L1><Hh><Xx><Yy><Zz><Ee><> 可选项定义轮廓直线加工轨迹。
等价于ROBFORM:X,x,Y,y(如用G17)LINE/ Y,y,Z,z(如用G19),L,I,H,h,E,eZ,z,X,x(如用G18)注:主加工轴为Z时使用LI代替Zz。
GO2 轮廓圆弧加工轨迹句法G02<Xx><Yy><Zz><Ll><Hh><Ii><Jj><Kk><Ee> <> 可选项定义顺时针圆弧加工轨迹。
注:一个整圆的编程至少要用两次ARC指令,才能完成。
等价于PROFORM:,X,x,Y,y(如用G17)ARC/DIR ,Y,y,Z,z(如用G19)L,I,H,h,E,e,Z,z,X,x(如用G18)GO3 轮廓圆弧加工轨迹句法G03<Xx><Yy><Zz><L1><Hh><Ii><Jj><Kk><Ee> <> 可选项定义逆时针圆弧加工轨迹。
注:一个整圆的加工,至少要两次ARC指令,才能完成。
夏米尔操作指南4
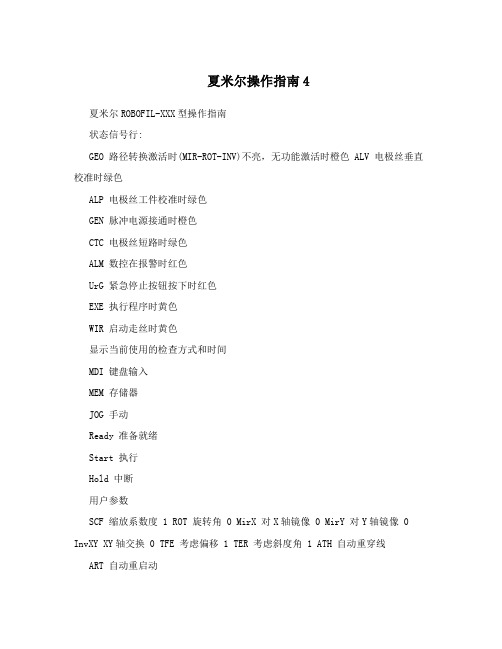
夏米尔操作指南4夏米尔ROBOFIL-XXX型操作指南状态信号行:GEO 路径转换激活时(MIR-ROT-INV)不亮,无功能激活时橙色 ALV 电极丝垂直校准时绿色ALP 电极丝工件校准时绿色GEN 脉冲电源接通时橙色CTC 电极丝短路时绿色ALM 数控在报警时红色UrG 紧急停止按钮按下时红色EXE 执行程序时黄色WIR 启动走丝时黄色显示当前使用的检查方式和时间MDI 键盘输入MEM 存储器JOG 手动Ready 准备就绪Start 执行Hold 中断用户参数SCF 缩放系数度 1 ROT 旋转角 0 MirX 对X轴镜像 0 MirY 对Y轴镜像 0 InvXY XY轴交换 0 TFE 考虑偏移 1 TER 考虑斜度角 1 ATH 自动重穿线ART 自动重启动SIM 空运行MLK 无移动模拟(程序校验)BLK 单段执行BLD 跳段有效,表示程序前有/的就不执行(如/M00) OSP 考虑可选停止制作:尹承效夏米尔ROBOFIL-XXX型操作指南BLK 打勾后,ISO程序单段执行OSP M01无效打勾后,M01有效(M01为暂停)BLD /开头的语句执行打勾后,/开头的语句跳过0、自动穿丝无效即断丝后不会自动穿丝ATH 1、断丝后回起割点自动穿丝再空走到断丝点切2、如果穿丝穿不进就直接加工下一个孔VSIM 空运行速度(6-900)1、机床坐标操做指令:SMA,X10 设制X轴机床坐标值为本10.00 SMA 设定机床坐标值X Y U V 同时为零MOV,X10 机床坐标系中的绝对移动将机床坐标X移到10处(注意无插补,各轴速度一样,路徑不是线性的) MOV XYUV都回零MOV,Z10 Z轴机床坐标移到10处绝对 Z轴不能同其他轴联动移动MVR 机床坐标的相对移动MVR,Z10 Z轴在现在的位置上向上移动10mm(不考虑转换、镜像、缩放,如果数控系统先前为绝对方式,移动后重新回到这一方式)制作:尹承效夏米尔ROBOFIL-XXX型操作指南CTR,X20 在此位置X轴向正方向加工20mm EDG,X-,X0.1252、工件坐标操作指令:SPA,X1 更新坐标SPA 同时更新XY的坐标为零MPA 绝对移动(不带值XY同时移动到零处) MPR 相对移动CPA 绝对加工CPR 相对加工3、预定义的移动GOH,Hh 按照工件高度H移动Z轴以定位喷嘴位 SEP,CPp 存储绝对坐标系中当前点的坐标p=点号,从0-5 GOP,p 移动到所定义的点位上,p=点号,从0-54、工艺和加工规准TEC<,表名> 激活含有准备使用的规准的工艺 WIR<,表名>激活准备使用的电极丝特性表HPA,h 修改当前高度h=新高度单位mm REX,Ee,(Hh)在所用工艺表中选择工艺规准Ee可选修改当高度(Hh) CLE(,c) 引入附加间隙(c=附加间隙,mm) CLE 设定附加间隙为零制作:尹承效夏米尔ROBOFIL-XXX型操作指南5、辅助功能AUX,m 辅助M功能(m=功能号)WTC 电极丝准备和切(拉)断WPR 断丝后的穿丝准备THR 自动穿丝(在WCT或WPR或人工丝准备之后) MDI模式常用指令:CT 相应的G\M代码SMA,XO,YO G74X0Y0 设定机床坐标的0,0点 SPA,XO,Y0 G92X0Y0 设定工件坐标的0,0点 MOV,X0,Y0 G75X0Y0 移动到机床坐标的0,0点 MVR,X2.0 X 方向相对移动2mm THD M60 穿丝WCT M50 剪丝SEP,CP1 G910 A1 设定当前点为1号点 GOP,1 G911 A1 从当前点移动到1号点EDG,Y,Y-0.125 Y方向对边,并把所对面设0CEN,R45 45度找孔中心 MID,R90 90度方向找中 CTR,X10 X方向相对切割10mm简单加工举例:TEC,LT25AREX,E2,H25制作:尹承效夏米尔ROBOFIL-XXX型操作指南CTR,X10程序执行:ZCL 加工计数器设回到零 SIM,I 激活(i=1) 不激活(i=0) EDG,s轴(,轴v) 找边CEN(,Xx)(,Yy)(,Rr) 找孔中心MID(,Xx)(,Yy)(,Rr) 在两个平行面之间找中GG00 快速移动G01 直线插补G02 顺时针圆弧插补G03 逆时针圆弧插补G04 暂停G09 准备停止一次移动到位 G10 指定偏移量/可选责程序跳步值 G11 自动加工顺序G17 编辑面选择G20 英制输入(英寸)G21 公制输入(mm)G22 存储行程极限功能ON(有效) G23 存储行程极限功能OFF G28 返回到第一参考点G29 从参考点返回到用户点 G30 返回到第二、第三、第四用户点 G32 存储当前点为用户第二、第三、第四参考点G33 设定用户点2,3,4G40 取消丝径补偿G41 电极丝左补偿G42 电极丝右补偿G46 最佳反向控制ONG47 最佳反向控制OFFG48 自动角部倒圆ONG49 自动角部倒圆OFFG50 取消斜度G51 左锥度G52 右锥度G53 在绝对坐标系中移动G61 恒定拐角半径制作:尹承效夏米尔ROBOFIL-XXX型操作指南G62 锥形拐角半径(最小) G63 锥形拐角半径(平均) G64 (最大) G65 宏调用(局部)G66 宏调用(全程)G67 取消宏调用(全程) G68 切割进给方式G69 准确停止方式G70 找边G71 找孔中心G72 找槽中心G73 电极丝校准和导向器设定循环 G74 设定测量点/机床坐标系设定 G75 在机床坐标系中定位 G76 定位-找边点类型1或2 G77 定位-测量点类型1、2或3 G78 定位-拐角点G79 计算工件倾斜角G86 取消支撑功能G87 “用支撑保留废芯”方式G88 “切除支撑”方式G90 绝对方式指令G91 相对G93 局部坐标系设定G94 恒速进给G95 伺服进给MM00 停止M01 可选停止(可用来建立支撑以保留废芯)M02 程序结束M06 穿丝水射流ON M07 上导电块退回ON M14 重穿丝块初始化 M15 锥度方式编成 M16 穿丝射水OFF M17 上导电块回退OFF M23 几何精度策略OFF M24 几何精度策略ON M27 保护策略OFF制作:尹承效夏米尔ROBOFIL-XXX型操作指南M28 一级粗加工策略ON M29 二级粗加工策略ON M30 程序结束和重绕 M31 预置计时器M32 检查水的离子度(电导率) M33 检查水的温度M34 工作液槽上水M35 放水M36 工作液槽位记忆+加载液位ON M37 加载液位OFF M40 空运行状态M42 走丝OFFM43 上、下冲液OFF M44 丝张力OFF M50 CUT 切丝M59 穿丝准备M60 穿丝M68 关闭循环泵M69 接通循环泵M70 轨迹返回功能M70 《执行有效》信号的管理 M71M73M74M80 加工状态M82 走丝开M83 下冲液开M87 存储功能1 ON M88 存储功能1 OFF M89 存储功能2 ON M90 存储功能2 OFF M91 遥控器报警有效 M92 遥控器报警无效 M93 遥控器报警接通ON M94 遥控器报警断开OFF M95 脉冲输出功能M96 完成加工M97 镜向反向加工M98 子程序调用M99 子程序结束制作:尹承效夏米尔ROBOFIL-XXX型操作指南穿丝射流水调整:EXE-service-calibration cyeles-wire calibration 激活卸下丝移动上加工头到相对于待加工工件所需的穿丝位置上接通穿丝射流水手动移动U/V轴以便使穿丝射流水对准下导向器的中心并在其周围分布均匀按memorize threading (记忆穿丝)ZUV 键,保存达到的位置存储UV位置;其值在穿丝操作中会自动用到。
慢走丝操作规程20110316

慢走丝设备操作规程(進口機)一.,架模前之準備工作:1.檢查模塊分辨種類.正反面.基準2.依線割圖檢查線割孔位置是否正確,線孔是否有小孔或線孔未鉆通.3.模塊四周是否有碰傷,毛邊,若有須用油石或砂輪機將其磨平.4.將工作單之架模要求(掃直目測.尋邊.尋中心.抓孔等)先了解清楚.5.用油漆筆將要求切割的圖形畫出并標示清楚正反面.基准.二.架模中注意事項:1.將機頭移至左上角,再行架模,以免架模時模塊掉落,撞傷下機頭,若需千斤頂架模時機頭移位后打開將機械鎖定.防止手動避免下機頭撞千斤頂.架完模取出千斤頂后再將機械鎖定打開.2.依工單要求,取出正確模板,依圖面分清模塊正反面,將模塊掃直,再掃平面度.3.平面度不平時(大板500mm誤差0.05以上,小板200mm誤差0.02以上)端子模,塑胶模按第十一项.a,利用壓板將其壓平.b,利用治具加螺絲調整平面.c,利用薄紙墊平.若以上方法仍無法改善平面反映主管處理.4.有大內孔或外形起割點盡量靠盡工作平台,減少變形.5.穿線目測第一孔空跑,檢查是否會破孔超程,上下機頭是否會撞壓板或治具.6.空跑中若會破孔,先了解孔性質是否可破孔,並調整第一孔起割點,適度偏移,盡量以最少破孔為起割點,並反映主管是否需挖入塊.7.有切割到模塊四周時,注意是否會切到治具.8.模塊有段差時,以模塊最高點設定Z軸.三.切割中注意事項:1.將第一孔G92程式座標輸入機台計數座標,隨時檢查程式與計數座標是否一致.2.注意廢料與治具,避免上下機頭撞机.3.廢料取出之方式:A,取小廢料以強力磁鐵吸起或以回紋針取出.B,取大廢料時將機台移開避免大廢料掉落,撞傷下機頭,以手托住廢料,另一手將銅片拔出,再將廢料向上頂起取出.C,有斜度無法從上取出的廢料,先確定廢料未掉入下機頭水蓋與眼模的溝中,用磁鐵吸住,確定廢料未掉下,再移動機台將廢料從下取出.D,會破孔的廢料,操作員須在旁注意廢料掉落之情形,(可依速度,放電水聲,圖形位置判斷),馬上停机檢查廢料是否掉下.4.依圖面要求將各孔切割至所需尺寸間隙,以圓棒塊規及異形衝測量,(異形衝測量時先測量異形沖尺寸是否正確).5.留修之工件注意預留量是否適當.6.切割共用模塊或滑塊注意共用斜度與模面設定(主程式面與副程式面)7.大型模具應注意防止變形,需塞銅片與粘鐵塊,注意塞粘位置是否適當正確.8.隨時注意程式線徑補正偏移(G41,G42)傾斜方向(G52, A)切割方向是否正確.9.共用孔確認以內孔準或衝子準,判斷線徑偏位是否正確.10.遇有異常狀況或無法解除之問題及時反映上級主管.11.切割中有空時,準備下一工作之安排,如審圖調圖檔,檢查模塊或支援幫助其他組員.12.切割沖子較大的須放穿線孔,避免變形.較大入塊先割外形,后割內孔,再修外形.四.修模注意事項:1.先了解模塊內容,須加工模塊確定是否需細孔放電.或需植入塊.2.將模塊掃平,基準孔以K200清潔后再抓孔.3.基準孔抓孔后輸入轉角檢查圖形是否正確.4.若基準孔誤差甚大,(依模具精度判斷容許誤差)可通知編程更改基準孔或掃直內孔(外形)抓附近一孔切割.5.切割當中注意間隙,線徑補正偏移,切割方向,廢料是否會掉落.6.若有疑問馬上反應主管,避免不必要的錯誤.五.切割完成之零件與模具:1.零件一般會預留噴沙量(預留量依實際噴沙量而定.)噴沙完后測量尺寸是否正確,以便與模塊配合.2.小模塊可放至噴沙機中清潔除銹.3.大模塊可放至除銹桶中浸泡4~6分鐘.4.以清水洗凈吹干噴上防銹油.5. 將工作單圖紙依規定放至完成區.六.架模常見錯誤與預防:1.架好模塊發現漏孔未鉆,或未鑽穿.預防:架模前先將線孔與圖紙核對,並檢查是否通孔.查明該孔性質,是否可拉線切割(需主管确认).2.架模時撞下機頭或千斤頂撞下机頭橫臂.預防:架模時一定要將機頭移至左上角,避免模塊掉落撞下机,頭架大模塊使用千斤頂時,機頭移至左上角后機械鎖定打幵等螺絲都鎖好后,將千斤頂取出再將機械鎖定關閉.3.架模時超程.預防:先算好工作範圍能預留多少提供架模,若確實不夠時,以治具架模,或分二次切割架模.4.掃直模塊時掃表撞傷.預防:正確使用掃表,表針與模塊呈30度以下為佳,掃平面時注意螺絲孔沉頭孔與銑槽,避免撞傷掃表針.5.模塊取錯,模塊正反面錯誤.預防:模塊相像時,將模塊一起比對圖紙分出正確模塊.正反面可依沉頭.逃位.螺絲.線孔.銑溝,無法判斷時反映主管.七.線割常見錯誤及預防1.未看清圖面設定錯誤,致使模板割錯.預防:原圖與線割圖面尺寸不符,可跳過不割,待查明再切割.2.下料模.復合模.滑塊模面設定錯誤.預防:設定完后請組長或其他組員幫忙檢查.3.材質與圖面不符或零件厚度數量不符.預防:確定切割材質,不明材質不予切割,厚度依圖面可高不可低.數量清點無誤再裝零件袋中.並將工件號.料厚.數量標示於袋上.4.修模時上下機頭撞到模塊入塊或零件.預防:修模時零件或入塊有高出模塊或模塊反面出之入塊將其取出,或抬高上機頭切割.5.上機頭降下過低造成撞机.預防:機頭下降時,快接近模塊時切換低速下降,以免高速下降撞機.6.修模時機頭過低撞上導柱孔.外形.避位孔預防:抬高機頭先空跑到快接近切割邊時,再降低機頭並保持在模塊最高點.7.切割衝子入塊時材料不夠.預防:切割前先空跑,檢查是否夠料,避免不必要的浪費與錯誤.8.切割公母共用時未更改模面設定.預防:切割共用設定時,請旁邊的組員組長幫忙檢查絯對.9.尋邊時線徑未加或加錯方向預防:一軸尋好邊立刻加線徑歸零,再尋另一軸,加線徑歸零,如此較不易錯誤.10.轉角錯誤未發現.預防:有轉角AR時,一定要空跑確定方向無誤才可切割,特別在正負值不確定時.11.M01鍵操作未打開,造成切割完無法停止撞廢料.預防:時時注意機臺加工情況,尤其起割與結束時之情形.12.破孔或修模廢料掉下撞机預防:隨時注意加工動向,預先避免廢料掉落,切割中注意切割速度與切割水聲,發現異常馬上停机檢查.13.細長內孔線孔作在中間時廢料掉落,撞机.預防:切割過一半即穿過起割點另一邊停機檢查,若廢料未掉,搖動廢料看是否可掉落,否則塞細小銅片避免掉落撞机.14.加工公母模,塞銅片粘鐵塊高於板面G00快速移位時撞機.預防:有粘鐵片或銅片時,執行G00前,將機頭抬高移位,待移至下一孔后再降低機頭.15.客戶原圖為第一角法.預防:若有發現,立刻反映更改視圖,統一為第三角法.16.模塊編號與圖紙不符.預防:立刻反映,查明原因.17.手動移位,未對圖紙造成跑點.預防:程式座標與計數座標設定一致,依圖紙手動移位,調程式,啟動后檢查二座標是否相同后再切割.18.加工過程中停電,清除程式后調錯孔序.預防:停電后,一定要抓基準孔,檢查是否跑點.調孔序切割時,如上例啟動后檢查二座標是否相同后再切割.八.切割中狀況處理:1.切割小圓孔時觸溝處理:割小孔時,操作員必須注意切割情況,快結束時將放電條件放低,避免二次放電觸溝或以無屑切割.2.小衝子切斷時無法取出.處理:以弱水切斷,要取出時以磁鐵吸住.切勿直接移動機頭,以免衝子掉落撞机.3.小孔位置正確但孔鑽斜應如何處理保證刀口不破孔.處理:調動X.Y.U.V軸無短路后,手動放電,X軸與U軸.Y軸與V軸同時呈相反方向移動,保證刀口不破,移至起割點.4.切割中試配內孔衝子或圓棒無法取出.處理:試配時切勿大力壓下無法配合時即退出返修,不可在模板上敲打,以免移動模板跑位.5.刀口板起割點在外的內孔,回起割點時触溝.處理:一般孔有過切0.3mm,須在程式于G40回起割點前插入 M016.穿線孔不在程式路徑上,空跑至穿線孔附近,機台暫停手動移到穿線孔,執行斷線自動回歸切割到停止點,再執行程式切割,避免廢料掉下撞機.九.線割機台速度慢的原因:1.機頭導電塊磨損需更換位置,機頭清洗,眼模通氣孔須暢通.2.調整上下機台,上機頭抬太高或下機頭過低,水壓不足.3.模塊有銑深或斷差,將放電條件調整至不斷線的最適合進給.4.導線輪軸承損壞易斷線,更換軸承.5.電極線接觸不良或斷線,將松動或氧化的接頭清洗重新鎖到定位.6.電路板故障,反映主管派人維修.十.架模標准時間:1.沖頭入塊10分鍾.2.新模﹕500㎜以下20分鍾﹐500㎜以上40分鍾.3.修模﹕500㎜以下15分鍾﹐500㎜以上30分鍾.十一.端子模加工流程及要求:1.来料→热处理→超生冷→粗磨→粗割→精磨→精割→放电→品检.2.模板粗割平面保证在0.02㎜内,精修平面保证在0.005㎜内.3.在精割过程中试配模孔,一定不能敲打模板,以免错位.4.水温水质控制在规定范围内(22°-24°)(55000-65000).5.零件加工步骤:先割冲子→割下模入子→割夹板入子→割脱料入子.核准/日期审核/日期:制表/日期:雷艳。
某x夏米尔线切割机操作说明书
夏米尔线切割机操作说明书1.目的为正确操作线切割设备以维持线切割设备之精度及稳定性,延长其使用寿命,使线切割加工作业规范.标准化,而达到提升质量保证,提升加工效率的目的,以满足客户需求.2.适用范围适合于ROBOFIL290.ROBOFIL500型号之线切割机.3.作业内容3.1 开机当电柜合闸通电的时候,数控恢复断电前的状态.如果想装软件,必须启动特别的启动屏幕,步骤如下:3.1.1 按通电开关.3.1.2 同时,按住控制板上任何一个键,直到显示启动屏幕.3.1.2.1 监控功能(MONITOR)是保留给CT维修服务人员的.3.1.2.2 装入功能(LOAD)用来装软件模块:系统.自诊断.3.1.2.3 初始化功能(INITALIZE)数控返回到初始状态(相当于装入软件的状态).3.1.2.4 继续功能(CONTINUE)用于退出特别启动屏幕,进入正常操作(象上面的操作一样,激活最后一个屏幕).3.2 安装软件3.2.1 系统软件一旦初始化菜单被激活,接着:* 把系统盘(磁盘A)插入驱动器A* 选择LOAD(F2)在装软件期间,磁盘驱动器二极管和屏幕右一指灯亮,数控显示装入过程的信息.装入结束后,NC在EXE方式下,以便执行装入下列文件的操作.(语言,CT-EXPERT.CAM- CT)3.2.2. 装入系统软件后,显示语言配置菜单:* 指明所需要的语言名,用RETURN确认* 根据指示插入所选择的语言盘* 按F1(寻找)输入必须的文件,设备即按所选语言配置.3.3 屏幕组织* 准备模式 (PREPARATION) 符号: PREP 背景色: 绿色* 执行模式 (EXECTION) 符号: EXE 背景色: 紫色* 信息模式 (INFORMATION) 符号: INFO 背景色: 蓝色* 图形模式 (GRAPIC) 符号: GRAPH 背景色: 橙色3.3.1 PREP 准备方式3.3.1.1 编辑器(EDITOR)该功能用来建立或修改ISO程序,控制程序PROFIL程序1): 寻找文本(FIND.TEXT)2): 寻找下一个(FIND NEXT)3): 块(BLOCK)4): 标记范围开始(MARK START>标记范围结束(MARK END)5): 保存文件(SAVE FILE)6): 退出(EXIT)3.3.1.2 CAM-CT* 准备ISO零件程序需要交替运用菜单功能与绘图功能.<此单节介绍略>3.3.1.3 专家系统(CT-EXPERT)* 这些程序可以手工或者由CT-EXPERT专家系统自动生成.* 与不使用CT-EXPERT专家系统相比,CT-EXPERT生成的TEC文件是分完整的.用一个TEC文件,一个ISO文件和一个命令文件就可能执行个加工操作.相反,当一个文件在CT-EXPERT中查询或者修改时,必须 3.3.1.4 文件(FILES)* 本功能用于处理存储在(所用的)不同单元上的所有文件(选择一个单示其下的文件目录).* 可以对给定目录中的文件操作,或者从一个目录转到另一个目录.1): 拷贝(COPY)2): 删除(DELETE)3): 改变名称(RENAME)4): 显示(DESPLAY)5): 打印(PRINT)6): 转换单元(CHANGE UNIT)7): 格式化(INITIALISE)8): 退出(EXIT)3.3.1.5 表编辑(EDIT TABLES)1): TEC--规准表(工艺文件的定义)2): OFS--偏移量(补正量)3): VAR--变量(变量值代入)4): WIR--电极丝(使用线参数)3.3.2. EXECUTION执行方式* 配置机台 * 调节多种参数* 运行测量功能 * 在开始加式操作之前,执行所需要的测试3.3.2.1. 执行程序(PROGRAM EXECUTION)1). 切割 (CUT)2). 空跑 (DRY RUN)3). 检验 (VERIFY)4). 绘图 (DRAW ON SCREEN)5). 改变模式 (CHANGE UNIT)3.3.2.2. 用户参数 (USER PARAMETERS)1) HPA: 工件设度 2) CLE: 补偿间隙3) SCF: 比例系数 4) ROT: 工件旋转5) TFE: 补正量认可 6) TRE: 斜度认可7) MIR,X: X镜像 8) MIR,Y: Y镜像9) ZID: 下导头至平台距离10) ZSD: 上导头至工件顶部距离11) BLK: 单节执行 12) CBC: 一个命令一个命令执行13) SIM: 加工与空跑转换14) TSIM: 模拟穿丝 15) VSIM: 空跑速度16) BLD: 遇"/"跳过 17) OSP: 选择性暂停18) ENG: 选择单位 19) COE: 遇不错误继续执行20) ART: 断电后自动重启动21) ATH: 断丝后重穿丝 22) CHRA: 选择表面精度的单位23) WIRE LN : 电极丝的消耗量24) MIOL: 测量允许的误差25) DVI: 缺省使用的源外设26) EXT: 缺省扩展 27) DEIO: 电介液的导电率28) ATT: 开始切入路径的长度29) EAO: 遥控报警3.3.2.3: 电源参数(GENERAO PARAMETERS)* EL: 使用的电极丝号* PA: 工件的材料号1) FF: 暂时降低频率 2) M : 切割方式3) V : 切割电压 4) A : 脉冲宽度(放电时间) 5) B : 休止时间 6) S : 最大进给率7) AJ: 伺服基准平均电压 8) TAC: 短脉冲时间9) IAL: 点火脉冲电流 10) WS: 走丝速度11) WB: 线张力 12) INJ: 水压13) ST: 保护策略3.3.2.4: 作图参数(DRAWING PARAMETERS) <略>3.3.2.5: 激活表(ACTIVE TABLES)1). TEC: 工艺表2). OFS: 补正值表3). VAR: 变量表4). PNT: 点表5). WIR: 电极丝准备表3.3.2.6: 测量(MEASURING)测量功能用于执行一系列操作,这些操作分成两类.* 机台调校测量* 电极丝相对于被加工工件位置的测量* 电极丝相对于被加工工件位置的测量1).找外轮廓中心(EXTERNAL CENTERING)2).找中心平面(MIDDLE) (寻沟槽)3).找拐角(CORNER)4).测角度(ALIGN ADGE)5).校孔ALIGN HOLES6).找边EDGE7).电极丝校垂直VERTICAL ALIGNMENT8).找中心CENTER9).工件校垂直PART ALIGNMERNT10).测ZID GUIDES SETUP11).喷嘴调节NOZZLE ADJUST12).垂直返回VERTICAL RETURN13).工件返回PART RETURN注意:1).一定要在加工状态下执行测量功能,例如,上导向器在低位置(工作位置),丝的张力正确(张力已校准,并且WB=精加工张力).水的离子浓度合适(即水电阻率要求范围)并保持恒温.2).被加工工件必须除油,去磁,去毛刺.3).每周一次,或者在每次加工高精度,斜度加工之前,特别是拆卸导向器后,要执行电极丝导向器设定功能.4).确信使用的电接触类型与所用电极丝的类型一致.5).开始测量前,要确认电极丝没有与被测量物短路.3.3.2.7. 手动(MANUAL)1).接触激活/不激活动力(TOUCH ACTIVE)2).返回断线点或轮廓(RETURN CONTOUR)3).电源参数(GENERATOR PARAMETERS)4).点动/连续方式(INCRE MENTAL MODE)5).接通/断开接触(SWITCH OFF CONTACT)6).激活/不激活(SWITCH OFF JET)7).软极限(SOFT LIMITS)3.3.2.8. 基准点(REFERENCE)机台配置的光栅尺每10MM有一个基准标记,任何一个基准标记都可以用来决定坐标轴的基准位置.3.3.2.9 服务(SERVICE)1).日期和时间(DATE HOUR)2).周期(CYCLES)3).语言(LANGUAGE)4).安全(SECURITY)3.3.3. INFO查询模式* 它汇集了所有涉及到机台配和加工操作监视的信息.3.3.3.1 观察画面(SURVEY)1). 机台坐标系(MACHINE)2). 工作坐标系(PART)3). 速度(SPEED)4). 压力(PRESURE)5). 去离子(DEIO)6). DO=0.000(补正值)3.3.3.2 加工画面(MACHINING)3.3.3.3 运行程序画面(RUNNING PROGRAMS)3.3.3.4 信息画面(MESSAGES)3.3.3.5 模态状况画面(MODAL STATE)3.3.3.6 空白画面(BLANK)3.3.3.7 参考点画面(REFERENCE)3.3.3.8 输入输出画面(INPUTS-OUTPUTS)3.3.3.9 断丝点画面(BREAKAGE POINTS)3.3.3.10 参考点画面(REFERENCE)3.3.3.11 输入输出画面(INPUTS-OUTPUTS)3.3.3.12 断丝点画面(BREAKAGE POINTS)3.3.3.13 服务画面(SERUICE)3.4 GRAPHIC 图形方式图形方式有一个图形页面,用于在操作者定义的平面上执行一个工件程序期间,在屏幕上显示电极丝行经的轨迹.3.5 常用命令词:3.5.1 CTA:用于机床坐标系的绝对加工移动.3.5.2 CTR:用于机床坐标系的相对加工移动.3.5.3 CPA:用于工件坐标系的绝对加工移动.3.5.4 CPR:用于工件坐标系的相对加工移动.3.5.5 GOH:用于移动Z轴,并根据新的工件高度H定位上导向器喷嘴的位置.3.5.6 GOP:把机床各轴移动到用SEP命令储存的点位.3.5.7 MOV:在机床坐标系中移动到所选定的数值.3.5.8 MVR:在机床坐标中相对移到所选定的数值.3.5.9 MPA:在工件坐标中移动到所选定的数值.3.5.10 MPR: 在工件坐标中相对移动到所选定的数值.3.5.11 REX:从当前规准表中取规准,传输给加工电源,参数根据工件高度H设定.3.5.12 SEP:点记忆.3.5.13 ZCL:时间计数器清靃.3.5.14 SMA:设定机床坐标系的X轴和Y轴坐标.3.5.15 SPA::设定工件坐标系的X轴和Y轴坐标.3.5.16 SPG:用来执行一个工件程序文件.3.5.17 TEC:用于选择含有即将使用的工艺规准表文件.3.5.18 CLS:清屏幕显示的图形页.3.5.19 CPY:用于拷贝原文件到另一前设,可以换名字.3.5.20 DLF:删除文件.3.5.21 LOOP:返回命令程序起点,并执行一定次数.3.5.22 SWA:存储电极丝按工作表面手动校直位置.3.6 加工前检查清单:3.6.1«电介液»功能检查:3.6.1.1过滤:确认过滤网压力表读数是否在设定范围,观察导电块冷却区是否有水浸泡.3.6.1.2 去离子度:15±2U.CM3.6.1.3 温度:20±0.53.6.2«腐蚀»功能的检查:3.6.2.1 导电块:是否被水浸泡,表面磨损情况及安装质量.3.6.2.2 接地电缆和编织线:各电缆连接是否牢固.3.6.3 «电极丝更换»的检查:3.6.3.1 丝的种类(直径.材料)3.6.3.2 走丝是否正常3.6.3.3 如果安装新的丝轴,检查丝轴的质量.丝是否有氧化.3.6.3.4 丝的校直和退火.3.6.4工件安装检查:3.6.4.1 夹治具的清洗.3.6.4.2 工件去毛刺.清洁.3.6.4.3 工件装夹.3.6.4.4 工件的调整.3.6.5参数调整和检查:3.6.5.1 绝对参考点找取.3.6.5.2 在更换(重新装)导向器之后,进行«导向器»设定循环.3.6.5.3 在更换喷嘴或更换导向之后,运行«喷嘴调节»过程.3.6.5.4 如果没有在命令程序内设定丝参数,就要在程序一开始加入该设定.3.6.5.5 在«EXE»方式下检查«用户»和«电源»参数什是否在工件切割时要求的参数值.3.6.5.6 在丝准备表内选择丝文件.(.WIR)3.6.5.7 选择需要的工艺文件.(.TEC)3.6.5.8 选择用户偏移文件.(USER.OFS)3.6.6程序运行.3.6.7开始切割.。
慢走丝之统赢操作说明及后处理修改说明
慢走丝之统赢操作说明及后处理修改说明相关搜索:后处理, 慢走NC程式中出現的補正編號是由變數90的控制,可以將#8更換為#90﹐Variable 90 = H20,abs,modal,integer,init/0.;Offset code :;;Offset Compensation Number#8與#90的區別,(根據客戶需要采用變數控制)#8的補正編號是由系統自動累加1,從H01﹒H02﹒H03﹒﹒﹒﹒H99﹒﹒﹒#90的補正編號是由DBF檔案資料庫與條件組補正編號控制﹐變動性較#8大﹐可以這選圖元時隨時改變補正編號#90補正編號可參考WPCAM﹒DBF檔案資料原Variable D = H10,init/0,not_modal,ex:H01,H02修改后Variable D = D10,init/0,not_modal,ex01,D02(也可以修改成其他字母代碼全世界慢走丝,中走丝,快走丝“常用中英词汇表”相关搜索:词汇表, 全世界, 慢走慢走丝名三菱Mitsubishi 牧野Makino 兄弟Brother 日立Hitachi 西部Seibu 沙迪克Sodlck法那科,富士通。
Fanuc 积柏时Japax 欧安?夏米尔洽米尔Charmiles 阿奇Agie GF阿奇夏米尔GF Agie-Charmills庆鸿Chmer 徕通Legend 京美Centech 美新?健升?秀丰?亚特?美溪?杜芬?联盛?三光科技Sanguang Technoloies 汉川?三光沙迪克Sanguang Sodlck 北京阿奇?中特?宝码?上海通用?安德?编程系统Esprit 无中文名你能取一个MasterCam 无中文名Ycut 立先Wpcam 统羸机台性能:最大工件尺寸Max workpiece size 最大工件重量Max workpiece weight X和Y轴行程X/Y Travel U,Vl轴行程U,VTreavl Z轴行程Z Travel 机械重量Net Wight机头移动距离Machine Head movement 电极直径Electrode pipe diameter 加工液容量Fluid capacity 加工液Dielectric fluid加工电源Input power 最大加工电流Max machineing current 机械高度Machine height 机台尺寸Machine size机器特性Features 穿线方法Thread type 半自动穿线Semi-auto thread 自动穿线Automatic thread驱动器Driver 伺服马达Servo motor 光栅尺位置检出装置Liner scale Positioning 线张力Wire tension 线速Wire feed垂直度Perpendicularity 锥度Taper 斜度Oblique 过滤方式Filtering element 纯水供液系统Pure water supply unit离子交换Ionexchange 冷却系统Coolant system 控制轴Axis control 最小设定单位Min setting 最小移动单位Min movment程序储存Program storage 轴旋转Axis rotating 镜像Mirror 线径补偿Offset 倍率scale 自动园角corner path转角暂停corner pause 加工电源Power supply 放电回路Discharge loop 电流current 停止时间Off time 放电时间On time辅助电流Auxiliary current 辅助停止时间Auxiliary offtime 伺服电压Servo Voltage 开路电压Open Voltage 精修功能Fine finish起始点回归Start point return 暂停点回归Hold point return 路径跟踪Path trcing 路径倒走Path retrace 起始点start point机台重置Restart 空跑Dry run 单节运行Single block execution 选择性停止Optional stop 斜度加工Taperdischarge选择性暂停Optional skip 呼叫子程序Subprogram 在线帮助On Line help 自动垂直校正Auto perpendicularity rectify自动寻边Auto edging 软件机台极限设定Soft limitsetting 自动找园中心Self centering 自动找外园中心Self O,Pcertering自动找沟Self centering in slit 座标Coordinate 参考点设定Reference point set 切割长度显示Cutting length display 回归参考点Home return加工时间计算working timer 切割速度显示Cutting speeddisplay 单节模拟Single block simulation 转角路径控制Cornering path control加工警告信息Alam message 喷水FW 浸水SW 材质Material 电极丝抗拉强度Wire tensile strength 廷伸率Elongation线芯材料core material 线轴Spool 转角内侧cornerinner 转角外侧corner outer 硬线Hard wire 软线Soft wire配合间隙自由配合Free fit 轻压配合Finger press fit 压入配合Handfit 松配合Rough fit 压配合Press fit 推入配合Push fit 滑动配合Easy push fit 轻转配合Easy running fit 轻滑配合Easyslide fit 精确配合Exact fit紧动配合Close running 特小间隙配合Close sliding fit 紧滑配合Close working fit 公差Tolerance 偏差Deviation火花位Wire overburn 修刀余量Stock to leave 总切割量Total offset 线切割速度Feedrate 电极丝半径Wire radius相关搜索:夏米尔, 代码Aa 锥度 A____ (角度)Cc 辅助平面旋转角度 C_____(角度)Ee 加工模式的选择 E____(正整数)Ff 多少秒闭锁时间 F____(常数)Hh 工件的厚度 H____(常数)Rr 基准面与辅助平面之间的距离 R____(常数)Ww 基准面与下部表面之间的距离G27 正常模式[取消模式 G28,G29,G30和G32]G28 锥形模式,旋转主轴类型[不变角]G29 尖角的锥形模式G30 恒定半径的锥形模式G32 扭转模式的约定和定义M03 起用电极丝进给M05 停用电极丝进给M06 自动穿丝M07 起用上部冲洗M08 起用下部冲洗M09 停用上部与下部冲洗M12 自动线切割M20 起用加工M21 停用加工多种慢走丝通用代码G代碼G00 快速移動G00 X___Y___U_ __V___G01 直線加工G01 X___Y___U_ __V___G02 順時針圓弧加工G02 X___Y___ I___ J____ G03 逆時針圓弧加工G03 X___Y____I___J____ G04G40 補正取消G40 X____Y____ G41 向左補正G41X____Y____G42 向右補正G42 X____Y____ G90 絕對值數據模式G90 (指定絕對坐標值)G91 相對值數據模式G91 (指定相對坐標值)G92 程式原點數據模式G92 X___Y____I____J____U____V ____M代碼M00 無條件停止工作M00 (當程式執行到M00單節時,機台將自動停止)M01 選擇性停止工作M01 (如果M01STOP按鍵按亮時,和M00功能相同)M02 程式結束 M02 (指定主程式結束)三菱(MITSU)線割機台代碼A 錐度 A____ (角度)L 程式編號L_____(正整數)N 程式中加工孔號N_____(正整數)R 圓弧半徑R_____(常數)K 旋轉角度K_____(角度)S 縮放比例S_____(常數)H 補正編號H_____(常數)E 加工條件E_____(正整數) F 加工速度F_____(正數)G22 呼叫副程式G22L__(正整數)G23 返回主程式G23G87 主程式與副程式圓角設定G87G88 自動化清角G88G89 取消自動化清角G89M20 自動穿線M20 M21 自動剪線M21 M80 噴水打開M80 M81 噴水關閉M81 M82 送線開始M82 M83 送線結束M83 M84 放電開始M84 M85 放電結束M85 M90 最適利進給打開M90M91 最適利進給結束M91慶鴻線割機台代碼A 錐度 A____ (角度)L(O) 程式編號L_____(正整數)N 程式中加工孔號N_____(正整數)R 圓弧半徑R_____(常數)K 旋轉角度K_____(角度)H(D) 補正編號H_____(常數)E(S) 加工條件E_____(正整數) F 加工速度F_____(正數)G22 呼叫副程式G22L__(正整數)G23 返回主程式G23G87 主程式與副程式圓角設定G87G94 定速切割G94 G95 伺服切割G95 M20 自動穿線M20 M21 自動剪線M21 M80 噴水打開M80 M81 噴水關閉M81 M82 送線開始M82 M83 送線結束M83 M84 放電開始M84 M85 放電結束M85 M90 最適利進給打開M90M91 最適利進給結束M91M98 呼叫副程式M98L(P)__ (正整數)M99 返回主程式M99沙迪克(SODICK) 線割機台代碼G05 X軸鏡象G05 G06 Y軸鏡象G06 G07 Z軸鏡象G07 G08 X.Y軸交換G08G09 取消鏡象与軸交換G09G26 圖形旋轉打開G26K___(角度) G27 圖形旋轉取消G27G50 取消錐度 G50 G51 向左側傾斜 G51G52向右側傾斜G52G74 打開四軸補正G74G75 關閉四軸補正G75G81 回歸机械原點G81G82 X或者Y方向分中G82G84 自動測垂直 G84X-G97 設定所有坐標系歸零G97XYT80 送線打開T80 T81 送線關閉T81 T82 加工液打開 T82T83 加工液關閉 T83T84 泵流打開 T84T85 泵流關閉 T85T86 噴流打開T86 T87 噴流關閉T87 T88 浸油加工T88 T89 噴水加工T89 T94 浸水加工T94 M05 忽視接触(短路)感知 M05M06 不放電M06M98 呼叫副程式M98L(P)__ (正整數)M99 返回主程式M99法蘭克(富士通FANUC) 線割機台代碼G10 設定補正值或者加工條件 G10P__R__(補正值設定)G10P__X__Y__Z__U__V__W__I__J_K_(加工條件設定 )G48 轉角R机能打開G48G49 轉角R机能關閉G49G50 取消錐度 G50X__Y__G51 向左側傾斜 G51 X__Y__ G52 向右側傾斜 G52 X__Y__G94 定速切割G94X__Y__F__G95 伺服切割G95X__Y__夏米爾(CHARMILL) 線割機台代碼Aa 錐度A_ ___ (角度)Cc 輔助平面旋轉角度C_____(角度)Ee 加工模式的選擇 E____(正整數)Ff 多少秒閉鎖時間 F____(常數)Hh 工件的厚度H____(常數)Rr 基准面与輔助平面之間的距离 R____(常數)Ww 基准面与下部表面之間的距离G27 正常模式[取消模式 G28,G29,G30和G32]G28 錐形模式,旋轉主軸類型[不變角]G29 尖角的錐形模式G30 恒定半徑的錐形模式G32 扭轉模式的約定和定義M03 起用電极絲進給M05 停用電极絲進給M06 自動穿絲M07 起用上部沖洗M08 起用下部沖洗M09 停用上部與下部沖洗M12 自動線切割M20 起用加工M21 停用加工还有很多!没有补全慢走丝线切割系统特征1.两平面,两轴直线,圆弧插补。
慢走丝管操作规范

一.,架模前之准备工作:1. 按令单要求检查模块分辨种类.正反面.基准,并填写相应记录。
2. 依线割图检查线割孔位置是否正确,线孔是否有小孔或线孔未钻通.3. 模块四周是否有碰伤,毛边,若有须用油石或砂轮机将其磨平.4. 将架模要求(扫直目测.寻边.寻中心.抓孔等)先了解清楚.5. 用油漆笔将要求切割的图形草画下并标示清楚正反面.基准.二.,编程要求及注意事项:1. 为统一图档规范作如下要求:A. 图档路径如: D:\WORK\SC\150309\1245.DWGB. 图档内图形放置方式:客户原图待编程图档:编程图档: 程式模拟检查1.洋红色为割一刀 1.如有镜像需标明2.红色为割一修一 2.生成程式名称:3.绿色为割一修二 s150306a…s150306b…4.如有公差需在此路径:D:\NC图偏置完成2. 注意事项:A. 编程用图公差是否以偏好B. 线割内容用颜色标识C.多余影响编程线删除D.开放路径的补偿方向必查 G41左边 G42右边E.图纸、工艺公差检查是否有遗漏F.为防变形是否需要双线头处理G.D1 为补偿代码 S1 为放电条件代码H.程式必需模拟检查I.图档是否及时存盘三.架模中注意事项:1. 将机头移至左上角,再行架模,以免架模时模块掉落,撞伤下机头,若需千斤顶架模时机头移位后打开将机械锁定.防止手动避免下机头撞千斤顶.架完模取出千斤顶后再将机械锁定打开.2. 依指令单要求,3.取出正确模板,4.依图面分清模块正反面,5.将模块扫直,再扫平面度.6. 平面度不平时(大板500mm误差0.05以上,小板200mm误差0.02以上)端子模,塑胶模按第十一项.a,利用压板将其压平。
牢固,由于水太较大,避免加工过程中抖动或跑位。
b,利用治具加螺丝调整平面.c,利用薄纸垫平.若以上方法仍无法改善平面反映主管处理.7. 有大内孔或外形起割点尽量靠尽工作平台,减少变形.8. 穿线目测第一孔空跑,检查是否会破孔超程,上下机头是否会撞压板或治具.9. 空跑中若会破孔,先了解孔性质是否可破孔,并调整第一孔起割点,适度偏移,尽量以最少破孔为起割点,并反映主管是否需挖入块.10. 有切割到模块四周时,注意是否会切到治具.11. 模块有段差时,以模块最高点设定Z轴极限.12.如以内外圆或四面分中,需将机台实测内外径或长宽尺寸计录于指令单内。
最新2019年某公司夏米尔线切割机操作说明书

夏米尔线切割机操作说明书1.目的为正确操作线切割设备以维持线切割设备之精度及稳定性,延长其使用寿命,使线切割加工作业规范.标准化,而达到提升质量保证,提升加工效率的目的,以满足客户需求.2.适用范围适合于ROBOFIL290.ROBOFIL500型号之线切割机.3.作业内容3.1 开机当电柜合闸通电的时候,数控恢复断电前的状态.如果想装软件,必须启动特别的启动屏幕,步骤如下:3.1.1 按通电开关.3.1.2 同时,按住控制板上任何一个键,直到显示启动屏幕.3.1.2.1 监控功能(MONITOR)是保留给CT维修服务人员的.3.1.2.2 装入功能(LOAD)用来装软件模块:系统.自诊断.3.1.2.3 初始化功能(INITALIZE)数控返回到初始状态(相当于装入软件的状态).3.1.2.4 继续功能(CONTINUE)用于退出特别启动屏幕,进入正常操作(象上面的操作一样,激活最后一个屏幕).3.2 安装软件3.2.1 系统软件一旦初始化菜单被激活,接着:* 把系统盘(磁盘A)插入驱动器A* 选择LOAD(F2)在装软件期间,磁盘驱动器二极管和屏幕右一指灯亮,数控显示装入过程的信息.装入结束后,NC在EXE方式下,以便执行装入下列文件的操作.(语言,CT-EXPERT.CAM- CT)3.2.2. 装入系统软件后,显示语言配置菜单:* 指明所需要的语言名,用RETURN确认* 根据指示插入所选择的语言盘* 按F1(寻找)输入必须的文件,设备即按所选语言配置.3.3 屏幕组织* 准备模式 (PREPARATION) 符号: PREP 背景色: 绿色* 执行模式 (EXECTION) 符号: EXE 背景色: 紫色* 信息模式 (INFORMATION) 符号: INFO 背景色: 蓝色* 图形模式 (GRAPIC) 符号: GRAPH 背景色: 橙色3.3.1 PREP 准备方式3.3.1.1 编辑器(EDITOR)该功能用来建立或修改ISO程序,控制程序PROFIL程序1): 寻找文本(FIND.TEXT)2): 寻找下一个(FIND NEXT)3): 块(BLOCK)4): 标记范围开始(MARK START>标记范围结束(MARK END)5): 保存文件(SAVE FILE)6): 退出(EXIT)3.3.1.2 CAM-CT* 准备ISO零件程序需要交替运用菜单功能与绘图功能.<此单节介绍略>3.3.1.3 专家系统(CT-EXPERT)* 这些程序可以手工或者由CT-EXPERT专家系统自动生成.* 与不使用CT-EXPERT专家系统相比,CT-EXPERT生成的TEC文件是分完整的.用一个TEC文件,一个ISO文件和一个命令文件就可能执行个加工操作.相反,当一个文件在CT-EXPERT中查询或者修改时,必须 3.3.1.4 文件(FILES)* 本功能用于处理存储在(所用的)不同单元上的所有文件(选择一个单示其下的文件目录).* 可以对给定目录中的文件操作,或者从一个目录转到另一个目录.1): 拷贝(COPY)2): 删除(DELETE)3): 改变名称(RENAME)4): 显示(DESPLAY)5): 打印(PRINT)6): 转换单元(CHANGE UNIT)7): 格式化(INITIALISE)8): 退出(EXIT)3.3.1.5 表编辑(EDIT TABLES)1): TEC--规准表(工艺文件的定义)2): OFS--偏移量(补正量)3): VAR--变量(变量值代入)4): WIR--电极丝(使用线参数)3.3.2. EXECUTION执行方式* 配置机台 * 调节多种参数* 运行测量功能 * 在开始加式操作之前,执行所需要的测试3.3.2.1. 执行程序(PROGRAM EXECUTION)1). 切割 (CUT)2). 空跑 (DRY RUN)3). 检验 (VERIFY)4). 绘图 (DRAW ON SCREEN)5). 改变模式 (CHANGE UNIT)3.3.2.2. 用户参数 (USER PARAMETERS)1) HPA: 工件设度 2) CLE: 补偿间隙3) SCF: 比例系数 4) ROT: 工件旋转5) TFE: 补正量认可 6) TRE: 斜度认可7) MIR,X: X镜像 8) MIR,Y: Y镜像9) ZID: 下导头至平台距离10) ZSD: 上导头至工件顶部距离11) BLK: 单节执行 12) CBC: 一个命令一个命令执行13) SIM: 加工与空跑转换14) TSIM: 模拟穿丝 15) VSIM: 空跑速度16) BLD: 遇"/"跳过 17) OSP: 选择性暂停18) ENG: 选择单位 19) COE: 遇不错误继续执行20) ART: 断电后自动重启动21) ATH: 断丝后重穿丝 22) CHRA: 选择表面精度的单位23) WIRE LN : 电极丝的消耗量24) MIOL: 测量允许的误差25) DVI: 缺省使用的源外设26) EXT: 缺省扩展 27) DEIO: 电介液的导电率28) ATT: 开始切入路径的长度29) EAO: 遥控报警3.3.2.3: 电源参数(GENERAO PARAMETERS)* EL: 使用的电极丝号* PA: 工件的材料号1) FF: 暂时降低频率 2) M : 切割方式3) V : 切割电压 4) A : 脉冲宽度(放电时间) 5) B : 休止时间 6) S : 最大进给率7) AJ: 伺服基准平均电压 8) TAC: 短脉冲时间9) IAL: 点火脉冲电流 10) WS: 走丝速度11) WB: 线张力 12) INJ: 水压13) ST: 保护策略3.3.2.4: 作图参数(DRAWING PARAMETERS) <略>3.3.2.5: 激活表(ACTIVE TABLES)1). TEC: 工艺表2). OFS: 补正值表3). VAR: 变量表4). PNT: 点表5). WIR: 电极丝准备表3.3.2.6: 测量(MEASURING)测量功能用于执行一系列操作,这些操作分成两类.* 机台调校测量* 电极丝相对于被加工工件位置的测量* 电极丝相对于被加工工件位置的测量1).找外轮廓中心(EXTERNAL CENTERING)2).找中心平面(MIDDLE) (寻沟槽)3).找拐角(CORNER)4).测角度(ALIGN ADGE)5).校孔ALIGN HOLES6).找边EDGE7).电极丝校垂直VERTICAL ALIGNMENT8).找中心CENTER9).工件校垂直PART ALIGNMERNT10).测ZID GUIDES SETUP11).喷嘴调节NOZZLE ADJUST12).垂直返回VERTICAL RETURN13).工件返回PART RETURN注意:1).一定要在加工状态下执行测量功能,例如,上导向器在低位置(工作位置),丝的张力正确(张力已校准,并且WB=精加工张力).水的离子浓度合适(即水电阻率要求范围)并保持恒温.2).被加工工件必须除油,去磁,去毛刺.3).每周一次,或者在每次加工高精度,斜度加工之前,特别是拆卸导向器后,要执行电极丝导向器设定功能.4).确信使用的电接触类型与所用电极丝的类型一致.5).开始测量前,要确认电极丝没有与被测量物短路.3.3.2.7. 手动(MANUAL)1).接触激活/不激活动力(TOUCH ACTIVE)2).返回断线点或轮廓(RETURN CONTOUR)3).电源参数(GENERATOR PARAMETERS)4).点动/连续方式(INCRE MENTAL MODE)5).接通/断开接触(SWITCH OFF CONTACT)6).激活/不激活(SWITCH OFF JET)7).软极限(SOFT LIMITS)3.3.2.8. 基准点(REFERENCE)机台配置的光栅尺每10MM有一个基准标记,任何一个基准标记都可以用来决定坐标轴的基准位置.3.3.2.9 服务(SERVICE)1).日期和时间(DATE HOUR)2).周期(CYCLES)3).语言(LANGUAGE)4).安全(SECURITY)3.3.3. INFO查询模式* 它汇集了所有涉及到机台配和加工操作监视的信息.3.3.3.1 观察画面(SURVEY)1). 机台坐标系(MACHINE)2). 工作坐标系(PART)3). 速度(SPEED)4). 压力(PRESURE)5). 去离子(DEIO)6). DO=0.000(补正值)3.3.3.2 加工画面(MACHINING)3.3.3.3 运行程序画面(RUNNING PROGRAMS)3.3.3.4 信息画面(MESSAGES)3.3.3.5 模态状况画面(MODAL STATE)3.3.3.6 空白画面(BLANK)3.3.3.7 参考点画面(REFERENCE)3.3.3.8 输入输出画面(INPUTS-OUTPUTS)3.3.3.9 断丝点画面(BREAKAGE POINTS)3.3.3.10 参考点画面(REFERENCE)3.3.3.11 输入输出画面(INPUTS-OUTPUTS)3.3.3.12 断丝点画面(BREAKAGE POINTS)3.3.3.13 服务画面(SERUICE)3.4 GRAPHIC 图形方式图形方式有一个图形页面,用于在操作者定义的平面上执行一个工件程序期间,在屏幕上显示电极丝行经的轨迹.3.5 常用命令词:3.5.1 CTA:用于机床坐标系的绝对加工移动.3.5.2 CTR:用于机床坐标系的相对加工移动.3.5.3 CPA:用于工件坐标系的绝对加工移动.3.5.4 CPR:用于工件坐标系的相对加工移动.3.5.5 GOH:用于移动Z轴,并根据新的工件高度H定位上导向器喷嘴的位置.3.5.6 GOP:把机床各轴移动到用SEP命令储存的点位.3.5.7 MOV:在机床坐标系中移动到所选定的数值.3.5.8 MVR:在机床坐标中相对移到所选定的数值.3.5.9 MPA:在工件坐标中移动到所选定的数值.3.5.10 MPR: 在工件坐标中相对移动到所选定的数值.3.5.11 REX:从当前规准表中取规准,传输给加工电源,参数根据工件高度H设定.3.5.12 SEP:点记忆.3.5.13 ZCL:时间计数器清靃.3.5.14 SMA:设定机床坐标系的X轴和Y轴坐标.3.5.15 SPA::设定工件坐标系的X轴和Y轴坐标.3.5.16 SPG:用来执行一个工件程序文件.3.5.17 TEC:用于选择含有即将使用的工艺规准表文件.3.5.18 CLS:清屏幕显示的图形页.3.5.19 CPY:用于拷贝原文件到另一前设,可以换名字.3.5.20 DLF:删除文件.3.5.21 LOOP:返回命令程序起点,并执行一定次数.3.5.22 SWA:存储电极丝按工作表面手动校直位置.3.6 加工前检查清单:3.6.1«电介液»功能检查:3.6.1.1过滤:确认过滤网压力表读数是否在设定范围,观察导电块冷却区是否有水浸泡.3.6.1.2 去离子度:15±2U.CM3.6.1.3 温度:20±0.53.6.2«腐蚀»功能的检查:3.6.2.1 导电块:是否被水浸泡,表面磨损情况及安装质量.3.6.2.2 接地电缆和编织线:各电缆连接是否牢固.3.6.3 «电极丝更换»的检查:3.6.3.1 丝的种类(直径.材料)3.6.3.2 走丝是否正常3.6.3.3 如果安装新的丝轴,检查丝轴的质量.丝是否有氧化.3.6.3.4 丝的校直和退火.3.6.4工件安装检查:3.6.4.1 夹治具的清洗.3.6.4.2 工件去毛刺.清洁.3.6.4.3 工件装夹.3.6.4.4 工件的调整.3.6.5参数调整和检查:3.6.5.1 绝对参考点找取.3.6.5.2 在更换(重新装)导向器之后,进行«导向器»设定循环.3.6.5.3 在更换喷嘴或更换导向之后,运行«喷嘴调节»过程.3.6.5.4 如果没有在命令程序内设定丝参数,就要在程序一开始加入该设定.3.6.5.5 在«EXE»方式下检查«用户»和«电源»参数什是否在工件切割时要求的参数值.3.6.5.6 在丝准备表内选择丝文件.(.WIR)3.6.5.7 选择需要的工艺文件.(.TEC)3.6.5.8 选择用户偏移文件.(USER.OFS)3.6.6程序运行.3.6.7开始切割.。
线切割慢走丝机床操作指导书
线切割慢走丝机床操作指导书慢走丝线切割机主要用于加工高精度零件。
慢走丝电火花线切割机床的品种较多,各种机床的操作大同小异,一些基本操作内容及其要求与快走丝电火花线切割机床有相似之处。
但慢走丝线切割机所加工的工件表面粗糙度、圆度误差、直线误差和尺寸误差都较快走丝线切割机好很多,其操作要求更加注重加工精度和表面质量。
线切割慢走丝机床1.工艺准备(1)工件材料的技术性能分析不同的工件材料,其熔点、气化点、导热系数等性能指标都不一样,即使按同样方式加工,所获得的工件质量也不相同。
因此必须根据实际需要的表面质量对工件材料作相应的选择。
例如要达到高精度,就必须选择硬质合金类材料,而不应该选不锈钢或未淬火的高碳钢等,否则很难实现所需要求。
这是因为硬质合金类材料的内部残余应力对加工的影响较小,加工精度和表面质量较好。
(2)工作液的选配火花放电必须在具有一定绝缘性能的液体介质中进行,工作液的绝缘性能可使击穿后的放电通道压缩,从而局限在较小的通道半径内火花放电,形成瞬时和局部高温来熔化并气化金属,放电结束后又迅速恢复放电间隙成为绝缘状态。
绝缘性能太低,将产生电解而形不成击穿火花放电;绝缘性能太高,则放电间隙小,排屑难,切割速度降低。
线切割慢走丝机床自来水具有流动性好、不易燃、冷却速度较快等优势。
但直接用自来水作工作液时,由于水中离子的导电作用,其电阻率较低,约为5kΩ•cm,不仅影响放电间隙消电离、延长恢复绝缘的时间,而且还会产生电解作用。
因此,慢走丝电火花线切割加工的工作液一般都用去离子水。
一般电阻率应在10~100kΩ•cm,具体数值视工件材料、厚度及加工精度而定。
如用黄铜丝加工钢时,工作液的电阻率宜低,可提高切割速度,但加工硬质合金时则反之。
加工前必须观察电阻率表的显示,特别是机床刚起动时,往往会发现电阻率不在这个范围内,这时不要急于加工,让机床先运转一段时间达到所要的电阻率时才开始正式加工。
为了保证加工精度,有必要提高加工液的电阻率,当发现水的电阻率不再提高时,应更换离子交换树脂。
夏米尔慢走丝指令清单

准备功能G指令清单GOO 不加工的运动句法G00<Xx><Yy><Zz><Cc><Rr> 定义四轴联动,以线性插补方式运动到指定点(X 、Y 、Z 、C )。
有C 轴运动时,Rr 表示电极相对于其中心的最大半径。
<Rr>不改变几何形状,但改善“C ”轴伺服性能 等价于PROFORM :GOTO/<,X,x><,Y,y><,Z,z><,C,c><,R,r>GO1轮廓直线加工轨迹 句法G01<L1><Hh><Xx><Yy><Zz><Ee> <>可选项例8.16定义轮廓直线加工轨迹。
等价于ROBFORM:X,x,Y,y(如用G17)LINE/Y,y,Z,z(如用G19),L,I,H,h,E,eZ,z,X,x(如用G18)注:主加工轴为Z时使用LI代替Zz。
GO2轮廓圆弧加工轨迹句法G02<Xx><Yy><Zz><Ll><Hh><Ii><Jj><Kk><Ee><>可选项定义顺时针圆弧加工轨迹。
注:一个整圆的编程至少要用两次ARC指令,才能完成。
等价于PROFORM:,X,x,Y,y(如用G17)ARC/DIR,Y,y,Z,z(如用G19)L,I,H,h,E,e,Z,z,X,x(如用G18)GO3轮廓圆弧加工轨迹句法G03<Xx><Yy><Zz><L1><Hh><Ii><Jj><Kk><Ee><>可选项定义逆时针圆弧加工轨迹。
注:一个整圆的加工,至少要两次ARC指令,才能完成。
慢走丝培训教材
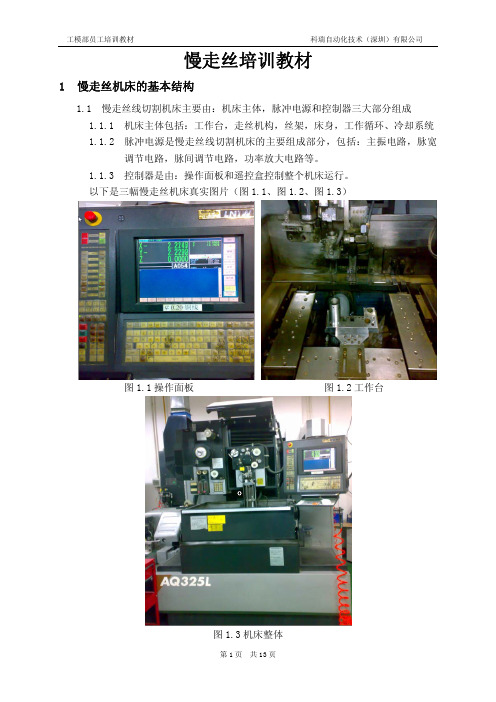
慢走丝培训教材1慢走丝机床的基本结构1.1 慢走丝线切割机床主要由:机床主体,脉冲电源和控制器三大部分组成1.1.1 机床主体包括:工作台,走丝机构,丝架,床身,工作循环、冷却系统1.1.2 脉冲电源是慢走丝线切割机床的主要组成部分,包括:主振电路,脉宽调节电路,脉间调节电路,功率放大电路等。
1.1.3 控制器是由:操作面板和遥控盒控制整个机床运行。
以下是三幅慢走丝机床真实图片(图1.1、图1.2、图1.3)图1.1操作面板 图1.2工作台图1.3机床整体2慢走丝的基本知识2.1 我司现使用慢走丝机床有:阿奇(AGIE CUT)慢走丝、夏米尔(Charmlles CUT)慢走丝、沙迪克(SODICK CUT)慢走丝。
2.2 慢走丝按使用的工作液分类:水机慢走丝、油机慢走丝2.2.1 水机慢走丝:采用离子水作工作液,主要是加工效率高,应用很普遍。
2.2.2 油机慢走丝:采用油作工作液,特点是:切割效率较低,但是加工精度高可达±0.001 mm,表面粗糙度可达Ra0.05,加工过程稳定。
适合加工高精密而体积较小的零件。
2.3 慢走丝的加工原理:工具电极(铜线)和工件之间加上脉冲电压,两者在绝缘介质液体中到达一定的间隙击穿形成放电通道,产生火花放电,放电时在局部产生瞬时高温(8000℃~12000℃)使金属材料熔化,甚至汽化并被液体介质带走,脉冲电源不断地发出电脉冲形成一次次火花放电将工件材料不断去除。
2.4 电极丝的类型及规格:2.4.1 慢走丝线切割是利用电极丝进行放电加工,所以电极丝是必不可少的,慢走丝线切割一般使用的是黄铜线、镀锌线做电极丝。
2.4.2 常用的黄铜线直径有:¢0.07mm、¢0.1mm、¢0.15mm、¢0.2mm、¢0.25mm 2.4.3 常用的镀锌线直径有:¢0.1mm、¢0.15mm、¢0.2mm、¢0.25mm3慢走丝的加工特点3.1 慢走丝线切割加工不需要像电火花成形加工那样制作特定形状的工具电极,它是用一根细电极丝作为工具电极,按一定的切割程序进行轮廓加工,所需去除的材料很少,属于少或无切削加工的工艺技术之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
夏米尔慢走丝操作说明书1.目的为正确操作线切割设备以维持线切割设备之精度及稳定性,延长其使用寿命,使线切割加工作业规范.标准化,而达到提升质量保证,提升加工效率的目的,以满足客户需求.2.适用范围适合于ROBOFIL290.ROBOFIL500型号之慢走丝.3.作业内容3.1 开机当电柜合闸通电的时候,数控恢复断电前的状态.如果想装软件,必须启动特别的启动屏幕,步骤如下:3.1.1 按通电开关.3.1.2 同时,按住控制板上任何一个键,直到显示启动屏幕.3.1.2.1 监控功能(MONITOR)是保留给CT维修服务人员的.3.1.2.2 装入功能(LOAD)用来装软件模块:系统.自诊断.3.1.2.3 初始化功能(INITALIZE)数控返回到初始状态(相当于装入软件的状态).3.1.2.4 继续功能(CONTINUE)用于退出特别启动屏幕,进入正常操作(象上面的操作一样,激活最后一个屏幕).3.2 安装软件3.2.1 系统软件一旦初始化菜单被激活,接着:* 把系统盘(磁盘A)插入驱动器A* 选择LOAD(F2)在装软件期间,磁盘驱动器二极管和屏幕右一指灯亮,数控显示装入过程的信息.装入结束后,NC在EXE方式下,以便执行装入下列文件的操作.(语言,CT-EXPERT.CAM-CT)3.2.2. 装入系统软件后,显示语言配置菜单:* 指明所需要的语言名,用RETURN确认* 根据指示插入所选择的语言盘* 按F1(寻找)输入必须的文件,设备即按所选语言配置.3.3 屏幕组织* 准备模式(PREPARATION) 符号: PREP 背景色: 绿色* 执行模式(EXECTION) 符号: EXE 背景色: 紫色* 信息模式(INFORMATION) 符号: INFO 背景色: 蓝色* 图形模式(GRAPIC) 符号: GRAPH 背景色: 橙色3.3.1 PREP 准备方式3.3.1.1 编辑器(EDITOR)该功能用来建立或修改ISO程序,控制程序PROFIL程序1): 寻找文本(FIND.TEXT)2): 寻找下一个(FIND NEXT)3): 块(BLOCK)4): 标记范围开始(MARK START>标记范围结束(MARK END)5): 保存文件(SAVE FILE)6): 退出(EXIT)3.3.1.2 CAM-CT* 准备ISO零件程序需要交替运用菜单功能与绘图功能.<此单节介绍略>3.3.1.3 专家系统(CT-EXPERT)* 这些程序可以手工或者由CT-EXPERT专家系统自动生成.* 与不使用CT-EXPERT专家系统相比,CT-EXPERT生成的TEC文件是分完整的.用一个TEC文件,一个ISO文件和一个命令文件就可能执行个加工操作.相反,当一个文件在CT-EXPERT中查询或者修改时,必须3.3.1.4 文件(FILES)* 本功能用于处理存储在(所用的)不同单元上的所有文件(选择一个单示其下的文件目录).* 可以对给定目录中的文件操作,或者从一个目录转到另一个目录.1): 拷贝(COPY)2): 删除(DELETE)3): 改变名称(RENAME)4): 显示(DESPLAY)5): 打印(PRINT)6): 转换单元(CHANGE UNIT)7): 格式化(INITIALISE)8): 退出(EXIT)3.3.1.5 表编辑(EDIT TABLES)1): TEC--规准表(工艺文件的定义)2): OFS--偏移量(补正量)3): VAR--变量(变量值代入)4): WIR--电极丝(使用线参数)3.3.2. EXECUTION执行方式* 配置机台* 调节多种参数* 运行测量功能* 在开始加式操作之前,执行所需要的测试3.3.2.1. 执行程序(PROGRAM EXECUTION)1). 切割(CUT)2). 空跑(DRY RUN)3). 检验(VERIFY)4). 绘图(DRAW ON SCREEN)5). 改变模式(CHANGE UNIT)3.3.2.2. 用户参数(USER PARAMETERS)1) HPA: 工件设度2) CLE: 补偿间隙3) SCF: 比例系数4) ROT: 工件旋转5) TFE: 补正量认可6) TRE: 斜度认可7) MIR,X: X镜像8) MIR,Y: Y镜像9) ZID: 下导头至平台距离10) ZSD: 上导头至工件顶部距离11) BLK: 单节执行12) CBC: 一个命令一个命令执行13) SIM: 加工与空跑转换14) TSIM: 模拟穿丝15) VSIM: 空跑速度16) BLD: 遇"/"跳过17) OSP: 选择性暂停18) ENG: 选择单位19) COE: 遇不错误继续执行20) ART: 断电后自动重启动21) ATH: 断丝后重穿丝22) CHRA: 选择表面精度的单位23) WIRE LN : 电极丝的消耗量24) MIOL: 测量允许的误差25) DVI: 缺省使用的源外设26) EXT: 缺省扩展27) DEIO: 电介液的导电率28) ATT: 开始切入路径的长度29) EAO: 遥控报警3.3.2.3: 电源参数(GENERAO PARAMETERS)* EL: 使用的电极丝号* PA: 工件的材料号1) FF: 暂时降低频率2) M : 切割方式3) V : 切割电压4) A : 脉冲宽度(放电时间)5) B : 休止时间6) S : 最大进给率7) AJ: 伺服基准平均电压8) TAC: 短脉冲时间9) IAL: 点火脉冲电流10) WS: 走丝速度11) WB: 线张力12) INJ: 水压13) ST: 保护策略3.3.2.4: 作图参数(DRAWING PARAMETERS) <略>3.3.2.5: 激活表(ACTIVE TABLES)1). TEC: 工艺表2). OFS: 补正值表3). VAR: 变量表4). PNT: 点表5). WIR: 电极丝准备表3.3.2.6: 测量(MEASURING)测量功能用于执行一系列操作,这些操作分成两类.* 机台调校测量* 电极丝相对于被加工工件位置的测量* 电极丝相对于被加工工件位置的测量1).找外轮廓中心(EXTERNAL CENTERING)2).找中心平面(MIDDLE) (寻沟槽)3).找拐角(CORNER)4).测角度(ALIGN ADGE)5).校孔ALIGN HOLES6).找边EDGE7).电极丝校垂直VERTICAL ALIGNMENT8).找中心CENTER9).工件校垂直PART ALIGNMERNT10).测ZID GUIDES SETUP11).喷嘴调节NOZZLE ADJUST12).垂直返回VERTICAL RETURN13).工件返回PART RETURN注意:1).一定要在加工状态下执行测量功能,例如,上导向器在低位置(工作位置),丝的张力正确(张力已校准,并且WB=精加工张力).水的离子浓度合适(即水电阻率要求范围)并保持恒温.2).被加工工件必须除油,去磁,去毛刺.3).每周一次,或者在每次加工高精度,斜度加工之前,特别是拆卸导向器后,要执行电极丝导向器设定功能.4).确信使用的电接触类型与所用电极丝的类型一致.5).开始测量前,要确认电极丝没有与被测量物短路.3.3.2.7. 手动(MANUAL)1).接触激活/不激活动力(TOUCH ACTIVE)2).返回断线点或轮廓(RETURN CONTOUR)3).电源参数(GENERATOR PARAMETERS)4).点动/连续方式(INCRE MENTAL MODE)5).接通/断开接触(SWITCH OFF CONTACT)6).激活/不激活(SWITCH OFF JET)7).软极限(SOFT LIMITS)3.3.2.8. 基准点(REFERENCE)机台配置的光栅尺每10MM有一个基准标记,任何一个基准标记都可以用来决定坐标轴的基准位置.3.3.2.9 服务(SERVICE)1).日期和时间(DATE HOUR)2).周期(CYCLES)3).语言(LANGUAGE)4).安全(SECURITY)3.3.3. INFO查询模式* 它汇集了所有涉及到机台配和加工操作监视的信息.3.3.3.1 观察画面(SURVEY)1). 机台坐标系(MACHINE)2). 工作坐标系(PART)3). 速度(SPEED)4). 压力(PRESURE)5). 去离子(DEIO)6). DO=0.000(补正值)3.3.3.2 加工画面(MACHINING)3.3.3.3 运行程序画面(RUNNING PROGRAMS)3.3.3.4 信息画面(MESSAGES)3.3.3.5 模态状况画面(MODAL STATE)3.3.3.6 空白画面(BLANK)3.3.3.7 参考点画面(REFERENCE)3.3.3.8 输入输出画面(INPUTS-OUTPUTS)3.3.3.9 断丝点画面(BREAKAGE POINTS)3.3.3.10 参考点画面(REFERENCE)3.3.3.11 输入输出画面(INPUTS-OUTPUTS)3.3.3.12 断丝点画面(BREAKAGE POINTS)3.3.3.13 服务画面(SERUICE)3.4 GRAPHIC 图形方式图形方式有一个图形页面,用于在操作者定义的平面上执行一个工件程序期间,在屏幕上显示电极丝行经的轨迹.3.5 常用命令词:3.5.1 CTA:用于机床坐标系的绝对加工移动.3.5.2 CTR:用于机床坐标系的相对加工移动.3.5.3 CPA:用于工件坐标系的绝对加工移动.3.5.4 CPR:用于工件坐标系的相对加工移动.3.5.5 GOH:用于移动Z轴,并根据新的工件高度H定位上导向器喷嘴的位置.3.5.6 GOP:把机床各轴移动到用SEP命令储存的点位.3.5.7 MOV:在机床坐标系中移动到所选定的数值.3.5.8 MVR:在机床坐标中相对移到所选定的数值.3.5.9 MPA:在工件坐标中移动到所选定的数值.3.5.10 MPR: 在工件坐标中相对移动到所选定的数值.3.5.11 REX:从当前规准表中取规准,传输给加工电源,参数根据工件高度H设定.3.5.12 SEP:点记忆.3.5.13 ZCL:时间计数器清靃.3.5.14 SMA:设定机床坐标系的X轴和Y轴坐标.3.5.15 SPA::设定工件坐标系的X轴和Y轴坐标.3.5.16 SPG:用来执行一个工件程序文件.3.5.17 TEC:用于选择含有即将使用的工艺规准表文件.3.5.18 CLS:清屏幕显示的图形页.3.5.19 CPY:用于拷贝原文件到另一前设,可以换名字.3.5.20 DLF:删除文件.3.5.21 LOOP:返回命令程序起点,并执行一定次数.3.5.22 SWA:存储电极丝按工作表面手动校直位置.3.6 加工前检查清单:3.6.1«电介液»功能检查:3.6.1.1过滤:确认过滤网压力表读数是否在设定范围,观察导电块冷却区是否有水浸泡.3.6.1.2 去离子度:15±2U.CM3.6.1.3 温度:20±0.53.6.2«腐蚀»功能的检查:3.6.2.1 导电块:是否被水浸泡,表面磨损情况及安装质量.3.6.2.2 接地电缆和编织线:各电缆连接是否牢固.3.6.3 «电极丝更换»的检查:3.6.3.1 丝的种类(直径.材料)3.6.3.2 走丝是否正常3.6.3.3 如果安装新的丝轴,检查丝轴的质量.丝是否有氧化.3.6.3.4 丝的校直和退火.3.6.4工件安装检查:3.6.4.1 夹治具的清洗.3.6.4.2 工件去毛刺.清洁.3.6.4.3 工件装夹.3.6.4.4 工件的调整.3.6.5参数调整和检查:3.6.5.1 绝对参考点找取.3.6.5.2 在更换(重新装)导向器之后,进行«导向器»设定循环.3.6.5.3 在更换喷嘴或更换导向之后,运行«喷嘴调节»过程.3.6.5.4 如果没有在命令程序内设定丝参数,就要在程序一开始加入该设定.3.6.5.5 在«EXE»方式下检查«用户»和«电源»参数什是否在工件切割时要求的参数值.3.6.5.6 在丝准备表内选择丝文件.(.WIR)3.6.5.7 选择需要的工艺文件.(.TEC)3.6.5.8 选择用户偏移文件.(USER.OFS)3.6.6程序运行.3.6.7开始切割.。