平面控制测 量 导线外业及内业计算
四等水准测量的外业测量步骤及内业计算的主要公式

四等水准测量的外业测量步骤及内业计算的主要公式
四等水准测量是一种常用的大地水准测量方法,用于测量地面上两个点之间的高程差。
下面是四等水准测量的外业测量步骤及内业计算的主要公式:
外业测量步骤:
1. 设站:选取测站点,并设置水准仪。
2. 观测:在各测站点上进行视线测量,记录水准仪读数。
3. 收站:移动至下一个测站点,重复观测步骤。
4. 控制测量:在适当的间隔处进行控制测量,以校正测量误差。
内业计算主要公式:
1. 高差观测值的纠正:
高差观测值的纠正 = 高差观测值 - 折差 - 改正数
其中,折差是由于视线折射引起的高差修正值,改正数是根据控制测量结果进行的纠正。
2. 高程改正数的计算:
高程改正数= Σ高差观测值 / 测站数
3. 闭合差的计算:
闭合差 = 高差观测值的代数和
4. 高程调整值的计算:
高程调整值 = 闭合差 / 测站数
5. 最终高程的计算:
最终高程 = 基准点高程+ Σ高程调整值
在四等水准测量中,还涉及其他一些参数和计算公式,如观测误差的计算、闭合差限差的确定等。
具体的计算过程和公式会根据实际情况和测量要求而有所不同。
因此,在进行四等水准测量时,最好参考相关的测量手册、标准和指南,并遵循正确的测量程序和计算方法,以确保测量结果的准确性和可靠性。
导线测量外业和内业计算表完整版

表3
水平角测量记录表
场次-线路抽签号:观测日期:
测量(号): 记录(号):
注:角度的计算取位至1秒
观测日期: 记录(号):
距离测量记录表
场次-线路抽签号: 测量(号):
注: 距 离 平 均 值 的 计 算 取 位 至 1mm 。
精品文档
导线测量成果计算表
场次-线路抽签号: 计算者(号):计算日期:
注:角度及改正数的计算取位至 1秒,距离、坐标及相关改正数的计算取位至1mm
精品文档
精品文档
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。
控制测量内页计算

x
X
Ⅰ
P1
R1
R4
a1
第Ⅰ象限 a = R
第Ⅱ象限 a =180 - R
第Ⅲ象限 a = 180 + R
a4 0
a3
R3
Ⅲ P3
Y
a2 R2
P2 Ⅱ
第Ⅳ象限 a =360 - R
三.直角坐标与极坐标X的换算
1.在坐标系中表示两个点的关系:
极坐标表示: D12,a12;
Y12
直角坐标表示:X12,Y12
1/120000
1/200000
三等
5
± 1.8
(首级) 1/120000
1/80000
(加密)
1/120000
四等
2
± 2.5
(首级) 1/80000
1/45000
(加密)
4.常规平面控制测量的主要技术要求
( 表7-1,表7-2,表7-3)
3.图根导线的技术要 求
图根导线的技术要求
表7-4
测图 附合导 平均边 测距相对 测 角 测回数 导线全 方位角
2主要方法 :水准测量 另外方法:三角高程测量、电子全站仪高程测量。
2等级关系 :分一等、二等、三等、四等,前一等作 为以后各等的控制基准,逐级控制(由 整体到局部,由高级到低级)。 地形测量时,布设图根水准(也称等外 水准)。
2技术要求 :P163 表7-5
表7-5 城市水准测量设计规格(长度单位:km)
比例尺 线长度 长(m) 中误差 中误差 DJ6 长相对 闭合差
(km)
(mm)
(″)
闭合差
1:500 500 75 一般地区
1:1000 1000 110 < 1/3000 ±20 1:2000 2000 180
平面控制测量

精度要求:符合规范规定。
例:图根导线
测距方法: 钢尺量距 电磁波测距
D往 D返 1 D平均 3000
2020/10/16
27
3.导线角度测量
——观测导线各转折角、连接角。
DJ6一个测回(图根导线)。左 右40
边长较短时,采用光学对点。
全部测左角,或全部测右角;闭合导线测内角。
4.导线连接测量
2 1
(4)推算各边的坐标方位角α: (用改正后的β改)
前 后 18 0 右 左
计算出的 终 终 , 否则,需重算。
2020/10/16
36
(5)计算坐标增量ΔX、ΔY:
Xi Di cosi
Yi Di sini
(6)计算坐标增量闭合差:
fx x(x终x始)
fy y(y终y始)
由于 f x , f y 的存在,使导线不能和CD连接,存
2020/10/16
14
7-2导线测量
1-2 导线测量
一.导线测量概述 二.导线测量的外业 三.导线测量的内业计算
2020/10/16
15
导线测量概述
导线测量概述
导线测量是平面控制测量中最常 用的方法。
闭合导线
导线的已知点和新建点组成的若 干条直线(即导线边)联结成一系 列折线或闭合多边形。
导线测量时,通常只需要前后两 点相互通视。
已知数据:AB,XB,YB;CD,XC,YC。
C CD
B
1 DB1
D12
2 D23
AB B
1
2
3 D34 4 D4C C
3
4 (XC,YC)
D
(XB,YB)
附合导线图
A
(整理)导线测量内业计算

导线测量内业计算导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。
首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。
一、坐标正算与坐标反算1、坐标正算已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。
如图6-6 所示,点的坐标可由下式计算:式中、为两导线点坐标之差,称为坐标增量,即:【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5",两点水平距离=200.416,计算点的坐标?35o17'36.5"=1163.58035o17'36.5"=1115.7932、坐标反算已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。
如图6-6可知,由下式计算水平距离与坐标方位角。
(6-3)(6-4)式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。
【例题6-2】=3712232.528、=523620.436、=3712227.860、=523611.598,计算坐标方位角计算坐标方位角、水平距离。
=62°09'29.4"+180°=242°09'29.4"注意:一直线有两个方向,存在两个方位角,式中:、的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。
坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。
【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、=1719.24,试计算坐标方位角、水平距离。
键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[],键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。
导线测量的内业计算
第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
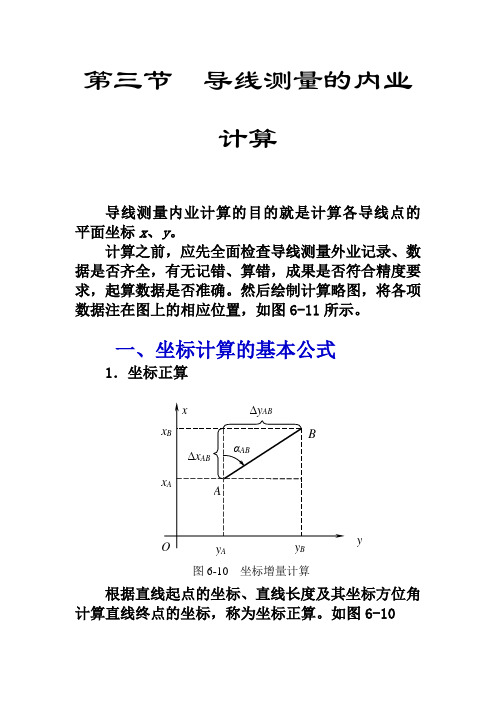
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10y图6-10坐标增量计算所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos(6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos(6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得6.792456380sin m 62.135m 82.658sin .457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
第九章__平面控制测量
三、导线测量的近似平差计算
支导线的计算
其计算步骤如下: 1.由A、M两点的坐标,使用坐标反算公式计
算出坐标方位角αAM。 2.由αAM起始,并根据观测角β1、β2…推算出
各边的坐标方位角。 3.由各边的坐标方位角及边长,按正算公式
控制测量的任务
在测绘各种大比例尺地形图时,要进 行必要的图根控制测量;在工程建设施工 阶段,要进行一定精度的施工控制测量; 在工程竣工后的营运阶段,为进行各种变 形观测而作的专用控制测量。由此可见, 控制测量是进行其他各项测量工作的基础, 它具有传递点位坐标并高精度控制全局的 作用,具有限制测量误差的传播和积累的 作用。
控制测量作业内容
技术设计、实地选点、标石埋设、观 测和平差计算等主要步骤。在常规的高等 级平面控制测量中,当某些方向受地形条 件限制不能使相邻控制点直接通视时,就 需要在控制点上建造觇标。采用GPS定 位技术建立平面控制网,由于不要求相邻 点之间通视,因此不需要建造觇标。
布设控制网的要求
控制网中控制点坐标是由起算数据和观测 数据经平差计算得到的。控制网中只有必要的 一套起始数据,例如三角网中已知一个点的坐 标、一条边长和一边的坐标方位角,这种控制 网称为独立网。如果控制网中已知数据多于必 要的起算数据,则这种控制网称为非独立网。 控制网中的观测数据按控制网的种类不同而不 同,有水平角或水平方向、边长、高差以及三 角高程测量的竖直角或天顶距,外业观测工作 完成后,应对观测成果进行整理和检核,保证 观测成果满足限差要求,然后进行平差计算。 对于高等级控制网需要进行严密平差计算,而 低级的控制网可以采用近似平差计算。
导线测量和水准测量

-13 167 21 43 90 18 33 116.44
-13 175 31 12 -13 214 09 20
94 47 21 156.25 60 38 01
增量计算值
Δx
Δy
m
mபைடு நூலகம்
+0.04 -0.02 -107.31 -64.81
+0.03 -0.02 -17.92 +97.12 +0.04 -0.02 +30.88 +141.29 +0.03 -0.02
• 导线布设的主要形式是闭合导线和附合导线,必要时还须布设结点导 线,由于导线的边长和角度测量中不可避免地存在误差,所以在导线 计算中将会出现两种矛盾:一是观测角的总和与导线几何图形的理论 值不符的矛盾,即角度闭合差;二是从已知点出发,逐点计算各点坐 标,最后闭合到原出发已知点或附合到另一已知点时,其推算的坐标 值与已知坐标值不符,即坐标闭合差。合理地处理这两种矛盾,最后 正确计算出各导线点的坐标,就是导线测量内业计算的基本过程和内 容。
二、平面控制测量
• 附合导线的计算
A
AB
B
3
D
4
CD
C
1
1
2
3
2
4
C
• 如图,A、B、C、D是已知点,起始边的
• 方位角 AB (和始终)止边的方位角
CD (终 )
• 为已知。外业观测资料为导线边距离和各转折角。
(1)计算角度闭合差:
f 测 理
如图:以右转折角为例
计算 理 。
一般公式:
(4)温度对仪器的影响
•
温度会引起仪器的部件涨缩, 从而可能引起视准轴的构件
控制测量的内业、外业基准面基准线

控制测量的内业、外业基准面基准线测量是一项重要的工程技术,广泛应用于建筑、土木工程、地理测量等领域。
测量的准确性直接影响到工程的质量和安全。
在测量中,内业和外业是两个关键的环节,而基准面和基准线则是内业和外业中的重要概念。
内业是指在室内进行的一系列数据处理、计算和分析工作。
在内业中,我们需要处理测量仪器采集的原始数据,进行数据清理、筛选和校正。
同时,还需要进行数据的计算和分析,以获得准确的测量结果。
内业的准确性对于外业的测量工作至关重要,只有在内业处理得当的情况下,才能保证外业测量的准确性。
外业是指在实地进行的测量工作。
在外业中,我们需要根据实际情况选择合适的测量方法和仪器,进行测量点的布设和测量。
基准面和基准线是外业测量中的重要概念。
基准面是指在测量过程中所选择的一个参考平面,用来确定测量点的高程。
基准线则是在测量过程中所选择的一个参考线,用来确定测量点的坐标。
通过选择合适的基准面和基准线,可以确保测量结果的准确性和可比性。
在测量中,内业和外业的工作是相辅相成的。
内业提供了外业所需的准确数据和参数,而外业则通过实地测量获取了实际的测量数据。
内业和外业的紧密配合可以提高测量工作的效率和准确性。
在进行测量工作时,我们需要注意以下几点。
首先,选取合适的测量方法和仪器是保证测量准确性的关键。
不同的测量任务需要选择不同的测量方法和仪器,以确保测量结果的准确性。
其次,数据的处理和分析是测量工作的重要环节。
只有对原始数据进行合理的处理和分析,才能得到准确的测量结果。
同时,数据的记录和保存也是非常重要的,以备后期查阅和验证。
最后,测量工作需要严格遵守相关的规范和标准,确保测量结果的可靠性和可比性。
控制测量的内业、外业基准面和基准线是保证测量准确性的重要环节。
通过合理选择基准面和基准线,以及内业和外业的紧密配合,可以提高测量工作的效率和准确性。
在进行测量工作时,我们需要注意选择合适的测量方法和仪器,进行数据的处理和分析,严格遵守相关的规范和标准。
导线计算公式

1、导线内业计算基本原理(1)坐标的正算x B=x A+Δx AB Δx AB=S AB cosαABy B=y A+Δy AB Δy AB=S AB sinαAB(2)坐标的反算tanαAB=Δy AB/Δx AB=(y B- y A)/(x A-x B)S AB =(3)坐标方位角的传递根据坐标方位角之间的几何关系,可以得到如下计算公式:当水平角为左角时,α前=α后+β左-180O当算出的角度为负值时,加360O转换为正角。
当水平角为右角时,α前=α后-β右+180O当算出的角度为负值时,加360O转换为正角。
6.2普通导线测量随着测绘科学技术的不断发展,电磁波测距和电子计算机技术的广泛应用,以导线测量的方法来建立平面控制网得到迅速推广。
导线的布设形式有下述几种:1.闭合导线闭合导线是从一个已知点出发,最后仍回到这个已知点。
如图6-2所示,由已知控制点1出发,经过2、3、4、5、6点最后仍闭合到1点,形成一个闭合多边形。
2.附合导线敷设在两个已知点之间的导线,称为附合导线。
如图6-5所示,由已知点B 和已知方向αAB 出发,经过导线点1、2、3、4点最后附合到已经点C 和已知方向αCD 。
图6-5 附合导线 图6-6 支导线3.支导线支导线也称自由导线,它是由一个已知点出发,既不回到原出发点又不附合到另外已知点上。
如果测量发生粗差,这种导线无法检核。
因此,布设时一般不得超过二条边(图6-6)。
6.2.1导线测量外业工作导线测量的外业工作包括:踏勘选点、角度测量、边长测量以及导线连接测量。
其工作内容如下:1.踏勘选点踏勘选点之前,应先到有关部门收集原有地形图、高一级控制点的坐标和高程,以及这些已知点的位置详图。
然后按坐标把已知点展绘在原有的地形图上,在图上规划导线的布设方案。
最后带上所规划的导线网图,到实地选定各点点位并建立标志。
现场选点应注意如下事项:(1)相邻导线点间应互相通视,以便测角和测边(如果采用钢尺量距,地势应较为平坦)。
关于导线测量中左右角的观测和内业计算的思考

第47卷第3期6|J送坊Vol.47,No.3 2021年3月Sichuan Building Materials March,2021关于导线测量中左右角的观测和内业计算的思考蒋德兴(四川建筑职业技术学院,四川成都610300)摘要:导线测量是平面控制测量的常用方法,在地形图测绘、道路以及隧道等工程的施工测量中,经常布设导线,先进行导线测量的外业观测,然后进行导线测量的内业计算来确定控制点的平面坐标。
本文就导线测量中的左右角在外业观测和内业计算时的不同点和相同点进行了思考。
关键词:导线测量;左角;右角;外业观测;内业计算;不同点;相同点中图分类号:U455文献标志码:A文章编号:1672-4011(2021)03-0061-02DOI:10.3969/j.issn.1672-4011.2021.03.0310前言导线测量是平面控制测量的常用方法,导线测量的外业包括踏勘、选定、建标、埋石、测角、测距等工作,导线测量的内业就是平差计算,即先对观测的水平角度进行改正,然后对坐标增量进行改正,最后计算出未知点的平面坐标。
观测的水平角度也叫转折角,它分为左角和右角,左角就是沿着导线测量前进方向上位于导线左侧的转折角,右角就是沿着导线测量前进方向上位于导线右侧的转折角。
导线测量时,既可以观测左角,又可以观测右角,但内业计算有所不同,本文重点就导线测量中观测左右角时内业计算的不同点和相同点进行剖析。
1左角和右角在观测时的区别图1所示为一闭合导线,B-l-2-3-B为测量的前进方向(逆时针方向),闭合导线要求只观测多边形的内角,不观测多边形的外角。
那么对于逆时针方向编号的控制点,自然也就按照逆时针方向依次计算各导线边的方位角和各未知点的坐标,这时内角就叫左角(外角叫右角,但不观测外角)。
本文以第1点的水平角pl为例,来说明左角的观测方法:①在第1点安置经纬仪(全站仪),对中并整平,在左目标B(后方点)和右目标2(前方点)上各放置一竖直细目标,且对准两个地面点;②盘左照准左目标B,读出水平方向值(设为a左),再顺时针转动照准部,盘左照准右目标2,读出水平方向值(设为b左),则得上半测回水平角0左二b左-a左;③纵转望远镜,逆时针转动照准部,盘右照准右目标2,读出水平方向值(设为b右),再逆时针转动照准部,盘右照准左目标B,读出水平方向值(设为a右),则得下半测回水平角B右= b右-a右;④上、下半测回合起来就是一个测回的观测,上、下半测回所测水平角之差邙二B左-0右在误差范围之内时,取其平均值p=(p左+B右)/2作为1点的一测回水平角。
控制测量(导线测量计算)
二 级
1800 180 ≤1/15000 ≤±8 ≤1/7000 1 3 ≤ 16 n
三 级
1200 120 ≤1/10000 ≤±12 ≤1/5000 1 2 ≤ 24 n
1:500 500 75
图 根
1:1000
1000
110
≤1/2000
1 ≤ 60 n
1:2000 2000 180
注:n为测站数。
等 级
测图 比例尺
附合 导线 长度 /m
平均 边长
/m
测距 中误差
/mm
测角 中误差
/″
导线全长 测回数 相对闭合
差 DJ2 DJ6
方位角 闭合差
/″
一 级
3600 300 ≤± 15 ≤±5 ≤1/14000 2 4 ≤ 10 n
二 级
2400 200 ≤±15 ≤±8 ≤1/10000 1 3 ≤ 16 n
用经纬仪测量转折角,用钢尺测定导线边长的导 线,称为经纬仪导线;
若用光电测距仪测定导线边长,则称为光电测 距导线。
一、导线的布设形式
1.闭合导线 2.附合导线 3.支导线
1.闭合导线 x
4
3
A
B
BA
2
1
从已知控制点B和已知方向BA出发,经过1、2、3、4 最后仍回到起点B,形成一个闭合多边形,这样的导线称
*
二、导线测量的等级与技术要求
等 级
测图 比例尺
导线 长度 /m
平均 边长
/m
测距相对 中误差
测角 中误差
/″
导线全长 测回数 相对 闭合差 DJ2 DJ6
方位角 闭合差
/″
一 级
控制测量的内业、外业基准面基准线

控制测量的内业、外业基准面基准线1 前言在测绘工作中,我们需要采集和处理各种数据,因此需要建立内业和外业基准面,以及基准线来控制测量的准确度和精度。
本文将介绍这些内容的定义、建立以及相关的测量控制工作。
2 内业基准面内业基准面是相对于地面水平面而言的一组坐标系统,其原点、坐标轴的方向以及承担的功能均有规定。
建立内业基准面时,需要选择基准点,以此来确定原点及其它参数。
一般情况下,内业基准面包括两个方向:水平方向和垂直方向,分别用平面坐标系和高程系统来表示。
水平方向的内业基准面通常采用地方坐标系作为计算基础,该坐标系应满足平方体形变条件,以确保测量结果的准确性。
内业基准面的高程则是以国家高程基准面为基准,以椭球面高程系统进行度量。
3 外业基准面外业基准面是指在野外测量中建立的控制网,其作用是为测量提供基础数据,以减小误差和提高测量精度。
外业基准面通常由测量控制点和其周围的辅助控制点组成,其坐标值应尽可能准确、稳定。
建立外业基准面时,首先需要选择控制点进行标定,然后通过测量、观测和计算等手段来确定其坐标值和高程值。
控制点的数量及其位置应根据测区面积、地形地貌和测量精度来决定。
4 基准线基准线是为野外测量提供方向控制的基础设施。
它通常由精密仪器如全站仪、经纬仪等进行测量、布设。
建立基准线需要考虑附近的地形地貌、地理条件、防止建筑物的振动、避免人为干扰等因素。
在采用过程中,应注意保持测量仪器的准确性,并根据气象、时间等因素进行校正。
基准线的建立应遵循精细化、系统化、标准化的原则。
标志物应尽可能稳定牢固,使其不受其他因素干扰。
建立的基准线应与内外业基准面严格配合,以确保测量精度和准确性。
5 测量控制工作内业、外业基准面及基准线的建立和使用是测量控制中必不可少的环节。
测量控制工作主要有以下几项:1)内业控制:根据测图要求,选定适当的内业控制网,进行数据管理和计算,以确保测量成果准确、可靠。
2)外业控制:对测区进行外业控制布设,包括控制点的精确定位、高程测量等,以便于后续的实地测量。
导线测量内业计算

、导线测量概述导线测量是建立各级平面控制网的方法之一。
导线:由若干条直线连成的折线,包括导线边和转折角导线边:每条直线边转折角:相临两直线边之间的水平角连接角和连接边:与高级控制点连接用的边和角,作为传递坐标方位角和1. 导线的布设形式闭合导线、附合导线、支导线、导线网附合导线:布设在两已知点之间的导线闭合导线:导线的起点和终点为同一个已知点的导线闭甘导线支导线:从一个已知点出发不回到原点,也不附合到另一已知点单结点导线多结点导线2. 导线测量技术指标粉1垃按Cm)涯蛊史■ 谟£方时DJt叫-ft 25002W VZCQ&0±5 1/ICM0 ― tia 厲厂; i 2 i二 stUD4VI50001/70±1£ /7 I 31300U1W 1*10000 土门I/5C0C ±» /TL2IM<1-Hmw*1/N0Cbid yv1雀,州为翡圈比鶴尺舟醉皿倉濤捣蠱丈为醫峭收"張斥神建为1* !愀.3. 导线测量外业工作踏勘、选点、埋设标志选点注意事项♦导线点应选在土质坚硬,能长期保存和便于观测的地方♦ 相邻导线点间通视良好,便于测角、量边♦ 导线点视野幵阔,便于测绘周围地物和地貌Id△ 单蜡点粉闊♦导线边长应大致相等,可减免因望远镜调焦带来的误差外业测量边长测量、角度测量三、导线测量的内业计算目的是计算出各导线点的坐标。
包括坐标正算和坐标反算根据已知点坐标、已知边长和坐标方位角计算未知点坐标,称为坐标正算; 由两个已知点的坐标反算坐标方位角和边长,称为坐标反算。
1. 坐标正算已知:A点坐标亠求:B点坐标—」由甸;:肚〕「式中所以有屯=勺4-^cos^和加称为坐标増量(-入712. 坐标反算根据A B两点坐标计算坐标方位角则故根据两点坐标计算水平距离根据勾股定理和三角函数的关系可得cos siiiDf^13妙九)i- ------------------------- 1 ------ K F 3. 方位角推算% = % + ^-360°=必誣十炖一180°q2 二十屈—1 - cz肿十bg十0i l 2x180°吟=%+另血-沙刚口1昕吟二0■血一乞A右+恥4. 单一导线计算的基本步骤①角度闭合差的计算和调整②用改正后的导线左角或右角推算各边的坐标方位角③坐标增量的计算④坐标增量闭合差的计算和调整⑤计算各导线点的坐标5•闭合导线的内业计算闭合导线角度闭合差(二)的计算与调整①计算闭合导线内角和的理论值二' :1 n式中为内角个数;一;吒为内角和的理论值②计算角度闭合差③计算角度闭合差的容许误差;」=-‘心(图根导线限差)④计算改正数♦导线各边坐标方位角的计算 --(计算时注意左右角的区别)山玄垃—A J C&S阿2Ay匕—上入虫劭九比竝加2产Djt COS码M♦坐标增量闭合差的计算和调整①闭合导线各边坐标增量总和的理论值Eg -0②坐标增量闭合差A - 2L山ss 1工加唱-2L "购③导线全长闭合差④ 全长相对闭合差A--i-oJ/ L▼ 二flTre)'十斗H/,r-•" X 』片蜩.初 15OD 2OM1廉足椎堆婴苯.6•附合导线的内业计算♦角度闭合差的计算与调整c4 =c ;& ±迟九 nvs 180° 兀二殆一屜⑤ 坐标增量改正数9 二_乞^ “% =Di♦坐标计算yi = rj-i 十观徇痢ttt樂标nt ・Cm>ft 正话煤椅 4«(m )总厂.—ArArJFy4CL 2 107 4B. 7 H>-+-5L£S». H S51.A4辅助订w<m)hKt6II7 M14-A3- J d?l 9r?一池 13>|3I. 77«S B4GM8-2改证ft+2 ■M址 2)■M乱坠話方悄rv ft対- at', iia.oo注意:当用左角计算时,改正数与r 反号;当用右角计算 J 时,改正数与6同号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前 后 左 180
或: 前 后 右 180
注意:若前两项计算出的方位角>180°,则减去180°; 若前两项计算出的方位角<180°,则加上180°;
例题:方位角的推算
已知:α 12=300,各观测角β
2、有关名词
小地区(小区域)(block, region) :不必考 虑地球曲率对水平角和水平距离影响的范围。 控制点(control point) :具有精确可靠平面 坐标或高程的测量基准点。 控制网(control network):由控制点分布和测 量方法决定所组成的图形。 控制测量(control survey):为建立控制网所进 行的测量工作。
讲题:导线测量内业计算
2、坐标正算公式
由A、B两点边长DAB和坐标方位角αAB,计算坐标
增量。见图有:
XAB =DAB cos AB YAB =DAB sin AB 其中,ΔXAB=XB-XA ΔYAB=YB-YA
0
X
YAB XAB AB DAB
B
A
y
(三)闭合导线平差计算步骤
3、控制测量分类
按内容分:
平面控制测量:测定各平面控制点的坐标X、Y。 高程控制测量:测定各高程控制点的高程H。 二级、三级导线。
按精度分:一等、二等、三等、四等三角网;一级、
按方法分:天文测量、常规测量(三角测量、导线测
量、水准测量)、卫星定位测量
按区域分:国家控制测量、城市控制测量、小区域
A1 484318 A
1
1
970300
10517062
A
2
XA=536.27m YA=328.74m
1122224
4
1233006 1014624 4
3
3
1
(1)计算坐标增量闭合差:
f x x测 x理 x测
970300
工程控制测量
二、国家控制网
平面:国家平面控制网由一、二、三、四等三角
网(triangulation network)组成。
2000国家GPS控制网2609个点。A、B等级平均
边长相应为650km和150km。GPS有A、
高程:国家高程控制网是由一、二、三、四等水 准网(leveling network)组成。
-2
+1
+63.94 -21.89 +63.93 -21.88 536.27 328.74
-1
+1
48 43 18
485.47 +0.09 -0.08
0
0
= 测理 = 405 = 60 容
理=5400000
=89
x = y =0.08 +0.09 ²y = ² x +
第7章:小地区控制测量
§7.1
1、目的与作用
概 述
一、控制测量(control survey)
为测图或工程建设的测区建立统一的平面控制
网(horizontal control network)和高程控
制网(vertical control network)。
控制误差的积累。
作为进行各种细部测量的基准
970300
1
A1 484318 A
A
XA=536.27m YA=328.74m
1122224
1051706
2
4
1233006 1014624 4
3
3
例题:闭合导线坐标计算表
点 转折角 改正后 方向角 边 长 坐 标 增量(米) 号 (右) D 转折角 (米) X Y
1
D12
2
D23
3
4
(XC,YC)
C
D
2
附合导线图
A 观测数据:连接角B 、C ; 导线转折角1, 2, 3 ,4 ; 导线各边长DB1,D12,……,D4C。
复习:坐标方位角 由坐标纵轴的北端顺时针量到
直线位置时所夹的水平角称为方位角;0º --360º
αAB
B
B
αAB
A
A
A
αAB
B、C、D、E五等,省级用C级网,云南省1311点。
国家控制网的特点:高级点逐级控制低级点。
图形1:国家一、二等平面控制网布置形式
一等三角网
二等三角网
国家二等水准网布设图
三、小区域(15km2以内)控制测量
小区域平面控制:
国家城市控制点——首级控制——图根控制。
小区域高程控制:
国家或城市水准点——三、四等水准——图根 点高程。
多用于面积较宽阔的独立地区。
2.附合导线(connecting traverse)
多用于带状地区及公路、铁路、水利等工程 的勘测与施工。 3.支导线(open traverse) 支导线的点数不宜超过2个,仅作补点使用。 还有导线网,其多用于测区情况较复杂地区。
图形:导线的布设形式
附合导线
闭合导线
§6.2
导 线 (traverse) 测量
一、定义及分类
1.导线的定义:将测区内相邻控制点(导线点)
(traverse point)连成直线而构成的折线图形。
2.适用范围:主要用于带状地区 (如:公路、铁
路和水利) 、隐蔽地区、城建区、地下工程 等控制点的测量。
二、导线布设形式
1.闭合导线(closed traverse)
1122224
f允 60" n
4
1233006 1014624 4
3
3
(3)若在限差内,则平均分配原则,计算改正 数: f
V
1
n
970300
1
V f
(4)计算改正后新 的角值:
A1 484318 A V f
A
XA=536.27m YA=328.74m
1122224
10517062
2
ˆi x Vxi x ˆ i x Vyi y
4
1233006 1014624 4
3
3
6、坐标计算
来依次计算各导线点的坐标。
1
根据起始点的已知坐标和经改正的新的坐标增量,
ˆ12 x2 x1 x ˆ12 y 2 y1 y
48 43 18
115.10 100.09 108.32
+75.93 +86.50 +75.91 +86.52 -66.54 +74.77 -66.56 +74.79 -97.04 -48.13 -97.06 -48.11
-2
+2
A 1
-2
+2
-2
+2
2
3 4 A
94.38 +23.80 -91.33 +23.78 -91.32 67.58
1122224
10517062
2
4
1233006 1014624 4
3
ˆ i i V
3
3、按新的角值,推算各边坐标方位角。 4、按坐标正算公式,计算各边坐标增量。 5、坐标增量闭合差(closing error in coordination increment)计算与调整
改 正 后 坐标(米) 点 增量(米) 号 X Y X Y
536.27 328.74 612.18 415.26 545.62 490.05 448.56 441.94 472.34 350.62
A 1 2 3 4 A 1
539 59 00 540 00 00
+12 97 03 00 97 03 12 131 40 06 +12105 17 18 105 17 06 206 22 48 +12 101 46 36 101 46 24 284 36 12 +12 123 30 18 123 30 06 341 05 54 +12 112 22 36 112 22 24
K=
D
1 = 4000
1 < 2000
单结点导线(导线网) 支导线
三、导线的外业
1.踏勘选点及建立标志 2.测水平角——转折角(左角、右角)、
连接角
3、量水平边长
附合导线外业:
已知数据:AB,XB,YB;CD,XC,YC。 点1、2、3、4为新建导线点。
C CD
D34 4 D4C
3 B DB1 1
AB
B (XB,YB)
30 12 1 95
122
2
2
130
如图,求各边坐标方位角α 23、 1 α 34、α 45、α 51。
解: α23= α
0=800 β ± 180 12 2
3
65 128
3
5
5
4
α34=
α23-β3±1800=1950
4
α45=2470
α51=3050
α 0(检查) =30 12
(2)分配坐标增量闭合差。
若K<1/2000(图根级),则将fx、fy以相反符号,按 边长成正比分配到各坐标增量上去。并计算改正后的坐标
增量。
Vxi fx Di D
1
970300
1
Vyi
D
fy
Di
A1 484318 A
A
XA=536.27m YA=328.74m
A B
αAB
B
正反坐标方位角: