申力步进电机与驱动器接法案例
步进电机控制方法及编程实例
步进电机控制方法及编程实例
步进电机在现代自动化控制系统中广泛应用,其精准的位置控制和相对简单的驱动方式使其成为许多工业和家用设备中的理想选择。
本文将介绍步进电机的控制方法及编程实例,帮助读者更好地理解和应用这一技术。
步进电机的基本原理
步进电机是一种将电能转换为机械能的电机,其运行原理基于磁场相互作用。
步进电机内部包含多个电磁线圈,根据电流方向和大小的不同来控制转子的运动。
通过逐个激活线圈,可以实现步进电机的准确位置控制,使其能够按照指定的步长旋转。
步进电机的控制方法
1.单相激励控制:最简单的步进电机控制方式之一。
通过依次激活每一相的线圈,
使电机按照固定步长旋转。
这种方法控制简单,但稳定性较差。
2.双相正交控制:采用两相电流的正交控制方式,提高了步进电机的稳定性和精
度。
可以实现正向和反向旋转,常用于对位置要求较高的应用场景。
3.微步进控制:将步进电机每个步进细分为多个微步进,以提高控制精度和减小振
动。
虽然增加了控制复杂度,但可以获得更平滑的运动和更高的分辨率。
步进电机的编程实例
下面以Python语言为例,演示如何通过控制步进电机的相序来实现简单的旋转控制。
通过以上代码,可以实现对步进电机的简单控制,按照设定的相序进行旋转,实现基本的位置控制功能。
结语
步进电机是一种常用的精准位置控制设备,掌握其控制方法和编程技巧对于工程师和爱好者来说都是有益的。
希望本文介绍的步进电机控制方法及编程实例能够帮助读者更好地理解和应用这一技术。
步进电机驱动电路

R11 R10 361x4
IC6 TCP521-4
1 io4 Vdd 16 2 io6 io2 15 3 o/i io1 14 4 io7 io0 13 5 io5 io3 12 6 inh a 11 7 Vee b 10 8 Vss c 9
+5V
13 1A
14 Vcc 12 1Y
Nc
11 5A
10 5Y
+15V
14
1
Vcc 1A
1Y
3
1B
2
E7 E12/47u25V +5V
IC9
5
NE555
C41
8 VCC 4 RST
R26
470u 35V
C7
103
7 DHE 3 OUT D1
2 TGR 5 CTL
3
4 2A 2Y 6 5 2B 9 1A 1Y 8
1B 10
C16
R27 333 D2
6 TSD 1 GND
78L15
2
PC6
47u
25V
E2
C2
47u
25V
E3
C3
47u
25V
PC3 PC3 47u 25V
PT3
1
Vin
Vout
3
GND
78L15
2
PC7
47u
25V
E4
C4
47u
25V
驱动/电源板: H2P-8AH.PCB
P
222
N
1kV
2
3 1/9 12
8 10/7
PD1
PT4
1
Vin
Vout
3
GND
申力86步进电机二相八线接线方法

电机招聘专家
一、并联接法:
以SL86S278A为例,相电流是4.2A。
假如:步进驱动器SL2680驱动器的电流调到(4.2A*1.4=)5.8A以下就可以。
步进驱动器适宜调到4.5~5.5A之间。
这种接法适用步进电机高速运行。
二、串联接法:
1、以SL86S278A为例,相电流是4.2A。
接这款步进驱动器SL2680驱动器的电流调到(4.2A/1.4=)3.0A 以下就可以。
步进驱动器适宜调到2.6A就可。
将步进电机的A-和C二个线头并接在一起有绝缘胶纸包好(也即是AC端)。
将步进电机的B-和D二个线头并接在一起有绝缘胶纸包好(也即是BC端)。
2、假如SL86S278A步进驱动器SL2680C驱动器的电流调到(4.2A/1.4=)3.0A以下就可以。
步进驱动器适宜调到2.8A就可。
将将步进电机的A-和C二个线头并接(也即是AC端)接驱动器的AC端上,将步进电机的B-和D二个线头并接(也即是BC端)接驱动器的BC端上。
这种接法适用步进电机低速运行。
电机招聘专家(此文转自一览电机英才网)。
步进电机原理接线

2相四线,四相五线,四相六线步进电机接线及驱动方法分类:单片机2010-07-18 09:24 5085人阅读评论(9) 收藏举报步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
步进电机接线

注意:用到HZ-RSL时,不要用开发板HZ-ULZ1上的VCC,因为步进电机运行时会消耗很大的电流,会使PL2303芯片烧坏。
接线方法:
1、找5V电源,引两根线到HZ-RSL上(上边已经标出),
2、再用四根杜邦线把开发板的P1.0、P1.1、P1.2、P1.3依次连到HZ-RSL上的ULN2003的第1、2、3、4脚(不要告诉我不知道1、2、3、4脚是哪个哦)相连。
3、把步进电机的引线插到HZ-RSL上的J2上,Leabharlann 意方向是凸起的一面朝ULN2003.
4、因为开发板和HZ-RSL不是共用的一个电源,所以需要共地,方法是:通过一根杜邦线把开发板的GND(开发板上的靠近液晶可调电阻附近的标有GND的插针)和HZ-ULZ1的GND连起来
5、为了保证实验效果,请把短路帽J5插上
一份步进电机驱动器整机电路图原创
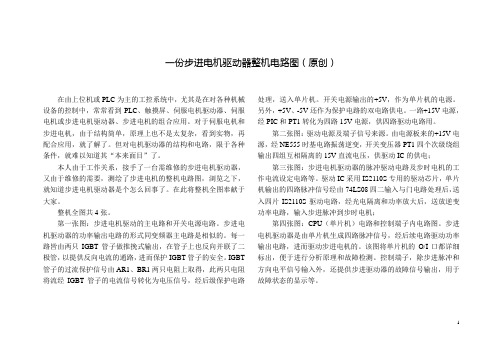
一份步进电机驱动器整机电路图(原创)在由上位机或PLC为主的工控系统中,尤其是在对各种机械设备的控制中,常常看到PLC、触摸屏、伺服电机驱动器、伺服电机或步进电机驱动器、步进电机的组合应用。
对于伺服电机和步进电机,由于结构简单,原理上也不是太复杂,看到实物,再配合应用,就了解了。
但对电机驱动器的结构和电路,限于各种条件,就难以知道其“本来面目”了。
本人由于工作关系,接手了一台需维修的步进电机驱动器,又由于维修的需要,测绘了步进电机的整机电路图,浏览之下,就知道步进电机驱动器是个怎么回事了。
在此将整机全图奉献于大家。
整机全图共4张。
第一张图:步进电机驱动的主电路和开关电源电路。
步进电机驱动器的功率输出电路的形式同变频器主电路是相似的。
每一路皆由两只IGBT管子做推挽式输出,在管子上也反向并联了二极管,以提供反向电流的通路,进而保护IGBT管子的安全。
IGBT 管子的过流保护信号由AR1、BR1两只电阻上取得,此两只电阻将流经IGBT管子的电流信号转化为电压信号,经后级保护电路处理,送入单片机。
开关电源输出的+5V,作为单片机的电源。
另外,+5V、-5V还作为保护电路的双电路供电。
一路+15V电源,经PIC和PT1转化为四路15V电源,供四路驱动电路用。
第二张图:驱动电源及端子信号来源。
由电源板来的+15V电源,经NE555时基电路振荡逆变,开关变压器PT1四个次级绕组输出四组互相隔离的15V直流电压,供驱动IC的供电;第三张图:步进电机驱动器的脉冲驱动电路及步时电机的工作电流设定电路等。
驱动IC采用IS2110S专用的驱动芯片,单片机输出的四路脉冲信号经由74LS08四二输入与门电路处理后,送入四片IS2110S驱动电路,经光电隔离和功率放大后,送放逆变功率电路,输入步进脉冲到步时电机;第四张图:CPU(单片机)电路和控制端子内电路图。
步进电机驱动器是由单片机生成四路脉冲信号,经后续电路驱动功率输出电路,进而驱动步进电机的。
电机接线说明

一、本店57 3A步进电机接线顺序,如下图所示:注意:不可接错相线,接错相线会烧驱动器!如果运转方向反了,对调A+ A-即可!附:4线/6线/8线2相(4相)步进电机相线区分方法:◆方法1—用万用表:4根线用万用表量导通,2根线导通的为一组,定义为为A相,则另外2根线就是B相。
A相B相是相对的,你也可以把第一组叫B相,第二组叫A相。
同一相线中,哪根是A+、A-(B+、B-),这个不重要,接反了只会影响电机转动方向,如果要调电机转动方向,只需要将A+ A-对调即可。
◆方法2—阻力判断:如果没有万用表,就把任意2根线短接,发现某2根线短接后电机轴转动有阻力的,就是一组。
定义为为A相,则另外2根线就是B 相。
6线步进电机相线区分及连接方法:6线步进电机相线区分方法和四相方法类似,同相线间电阻很小,不同相线电阻无穷大。
重点是中间抽头的判断:同组线圈3根线,每两根线之间量电阻,其中一根线到另外两根线之间电阻相等的,即为中间抽头接法有如下2种:图 1 图 2图1接法的特点:舍弃中心抽头接两端,实际就是将每组的两个相线圈串联起来使用,电机堵转矩大和效率高些,但是高速性能差。
图2接法的特点:接中心抽头和一端,这种接法电机高速性能好些,但是每相有一组线圈空闲,堵转矩小和效率低些。
8线制的步进电机接法:接法1:是将每两组线圈串联使用,这样驱动器的电流也是设定为电机相电流的0.7倍,这种接法电机发热量小,但是高转速性能差些。
接法2:将每两组线圈并联使用,驱动器的电流设定为电机相电流的 1.4倍,其优点是高转速性能好些,但是电机发热量大,但是步进电机发热是允许的,只要低于电机的消磁温度就行,一般步进电机的消磁温度在105度左右。
三张接线图搞定步进电机接线问题!
三张接线图搞定步进电机接线问题!很多小伙伴刚接触步进电机,步进电机驱动器,很有可能对于步进电机接线方法和步进电机接线图弄不明白,所以可能无从下手。
下面这篇文章让您快速掌握步进电机的接线方法,三张实用的步进电机接线图教你快速解决。
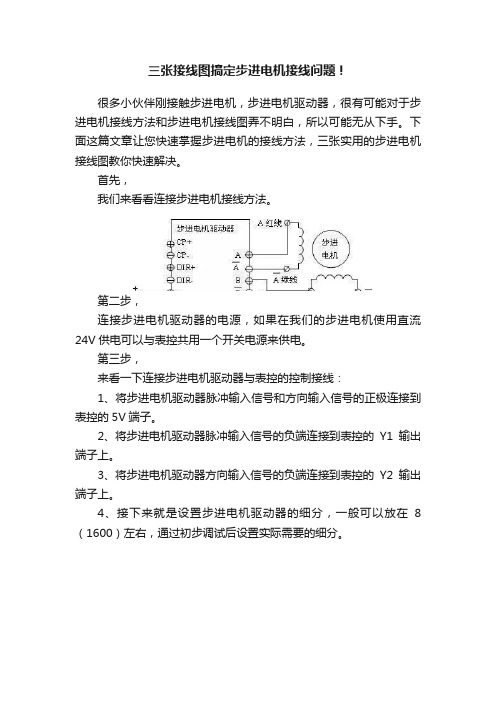
首先,我们来看看连接步进电机接线方法。
第二步,连接步进电机驱动器的电源,如果在我们的步进电机使用直流24V供电可以与表控共用一个开关电源来供电。
第三步,来看一下连接步进电机驱动器与表控的控制接线:1、将步进电机驱动器脉冲输入信号和方向输入信号的正极连接到表控的5V端子。
2、将步进电机驱动器脉冲输入信号的负端连接到表控的Y1输出端子上。
3、将步进电机驱动器方向输入信号的负端连接到表控的Y2输出端子上。
4、接下来就是设置步进电机驱动器的细分,一般可以放在8(1600)左右,通过初步调试后设置实际需要的细分。
5、设置步进电机的正转设置,参考设置,一行实现正转。
X1是正转的启动开关。
6、步进电机反转的设置:X2是反向启动开关,Y1输出脉冲,Y2输出方向信号。
两行实现反转动作。
好了,小编描述了步进电机接线和最基本的设置方法就到这里告一段落了,一般情况保证接线正确,但是要特别注意的是电源的极性,设置正确就可以正常运行。
看到这里,相信很多小伙伴对此已经非常熟悉了。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机通常被用作定位控制和定速控制。
下面为大家分享三张最实用的步进电机接线图!二相混合式步进电机+三相混合式步进电机+五相混合式步进电机接线图空心杯无刷电机接线图工业级无刷电机接线图看完以上关于步进电机接线的知识和问题,是不是轻松就搞定了呢?!来源:网络。
ULN2003步进电机接线图及程序

ULN2003步进电机接线图及程序ULN2003 步进电机驱动板使用说明一、主要技术参数1、工作电压 DC 4-12V2、工作电流≤500mA3、适用于 2 相 5 线步进电机4、带工作指示灯,方便客户观察工作状态。
同时也可以用于板子自测,5-12V 处通上电源后,将电源的正极分别去接 IN1-IN4 对应的指示灯会亮,表明板子是好的。
5、ULN2003 最高工作电压可以达到DC30V,如果客户需要接24V 等步进电机,需要将板子上的限流电阻加大,以免烧坏工作指示灯。
二、ULN2003 简介三、驱动板接 5V 和 12V 电机与单片机系统板的连接图四、步进机工作式电机可以使用单四拍、双四拍和八拍方式驱动4.1 单四拍: A-B-C-D(0001、0010、0100、1000)#includeunsigned char code F_Rotation[4]={0x01,0x02,0x01,0x08};//正转表格unsigned char code B_Rotation[4]={0x08,0x04,0x02,0x01};//反转表格void Delay(unsigned int i)//延时{while(--i);main(){unsigned char i;while(1){for(i=0;i<4;i++) //4 相 {P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格Delay(500); //改变这个参数可以调整电机转速}}}4.2 双四拍:AB-BC-CD-DA(0011、0110、1100、1001)#include unsigned char code F_Rotation[4]={0x03,0x05,0x0D,0x09};//正转表格unsigned char code B_Rotation[4]={0x09,0x0D,0x05,0x03};//反转表格void Delay(unsigned int i)//延时{while(--i);}main(){unsigned char i;while(1){for(i=0;i<4;i++) //4 相 {P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格Delay(500); //改变这个参数可以调整电机转速}}4.3 八拍方式:A-AB-B-BC-C-CD-D-DA(0001、0011、0010、0110、0100、1100、1000、1001)#includesbit key=P2^0; //按键控制步进电机的方向//八拍方式驱动,顺序为 A AB B BC C CD D DAunsigned char code clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d}; void Delay(unsigned int i)//延时{while(--i);}void main(){unsigned char i;while(1){for(i=0;i<8;i++){if(key) //按键未按下,正转{P0=clockWise[i];Delay(500);}else //按键按下,反转{P0=clockWise[8-i];Delay(500);}}。
步进驱动器接线:步进电机驱动器与plc怎么接线【附接线图】

步进驱动器接线:步进电机驱动器与plc怎么接线【附接线图】 步进电机驱动器和PLC怎么接线? PUL+:+5V或+24V串2K电阻。
PUL-:Y0 (PLC输出COM0:-5V或-24V (输出Y点对应COM端))。
DIR+:+5V或+24V串2K电阻。
DIR-:Y1 (PLC输出COM1:-5V或-24V (输出Y点对应COM端))。
EN+:+5V或+24V串2K电阻。
EN-:同上(使能脱机信号,可接可不接) 伺服电机内部的转⼦是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转⼦在此磁场的作⽤下转动,同时电机⾃带的编码器反馈信号给驱动器,驱动器根据反馈值与⽬标值进⾏⽐较,调整转⼦转动的⾓度。
伺服电机的精度决定于编码器的精度(线数)。
脉冲型步进电机驱动器与PLC的接线: 以PMD006P2这款驱动器采⽤共阴极接法为例,下图为PMD006P2驱动器操作⼿册上的共阴极接线⽅式: 驱动器实物及详细端⼝描述如下图: 脉冲型驱动器与PLC共阴极接线⽅案图如下: 注意: 1、R电阻为分压电阻,由于PMD006P2驱动器信号输⼊电压为5V,⽽PLC输出信号电压为24V所以需要接⼀个3.3Kohm 1/4W的分压电阻 2、使⽤此种共阴极接法在待机状态下,需保证Y0为低电平,如果Y0为⾼电平,驱动器待机时也会处于⼯作状态,从⽽导致驱动器发热 步进电机驱动器与PLC的接线图 步进电机驱动器与PLC的接线图分很多种,⾸先我们需要确定步进电机驱动器的类型,总线控制的步进电机驱动器与PLC的接线图和脉冲型的步进电机驱动器是有较⼤区别。
总线型步进电机驱动器与PLC的接线最⽐较简单,如果⽤CAN总线只需分别将PLC的CANH、ANL与驱动器的CANH、CANL⼀⼀对应接上就⾏,值得注意的是CAN总线的末端需要接⼀个120欧的终端电阻。
德科智控步进驱动器⼚家提供步进驱动器、步进电机接线⽰意图及接线⽅法指导,有对应电机⼯程师给与技术⽀持!相关推荐。
42步进电机接线图【附图】

步进电机接线图,许多合作伙伴刚熟悉步进电机和步进电机驱动器。
他们可能不了解42步进电机接线方法和接线图,因此可能无法启动。
下面这篇文章可以让你快速掌握步进电机的接线方法,快速了解步进接线图。
首先,让我们看看如何连接42步进电机接线方法。
第一步是接通步进电机驱动器的电源。
如果我们在步进电机中使用直流24伏电源,我们可以与仪表控制共用开关电源。
第二步是连接步进电机驱动器和仪表控制控制接线:1.将步进电机驱动器的脉冲输入信号和方向输入信号的正极连接到仪表控制的5V端子上。
2.将步进电机驱动器脉冲输入信号的负端连接到仪表控制的Y1输出端。
3.将步进电机驱动方向输入信号负端接至仪表控制Y2输出端。
4.下一步是设置步进电机驱动器的细分,一般可放置在8(1600)左右。
在初步调试之后,设置所需的实际细分。
5.设定步进电机正向旋转设定,参照设定,一行实现正向旋转。
X1是向前旋转的起动开关。
6.步进电机反向设定:X2为反向启动开关,Y1输出脉冲,Y2输出方向信号。
两行执行相反的操作。
以上简单介绍42步进电机接线的方法和最基本的设置教程,一般要保证接线正确,但要特别注意电源的极性,正确的设置才能正常工作。
扩展资料:两相42步进电机的额定功率:步进电机不讲功率得,一般都讲转速,电流,力矩,惯量等。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度。
它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机驱动器DM使用方法及电机接线使用说明

步进电机驱动器D M使用方法及电机接线使用说明 The Standardization Office was revised on the afternoon of December 13, 2020DM542型细分型两相混合式步进电机驱动器,采用直流18-50V供电,适合驱动电压为18V-50V,电流小于4.0A外径42-86mm的两相混合式步进电机。
此驱动器采用交流伺服驱动器的电流环进行细分控制,电机的转矩波动很小,低速运行很平稳,几乎没有振动和噪音。
高速时力矩也大大高于其它二相驱动器,定位精度高,广泛用于雕刻机,数控机床,包装机械等分辨率要求较高的设备上!主要特点1 平均电流控制,两相正弦电流驱动输出2 直流18~50V供电3 光电隔离信号输入/输出4 有过压、欠压、过流、相间短路保护功能5 十五档细分和自动半流功能6 八档输出相电流设置7 具有脱机命令输人端子8 电机的扭矩与它的转速有关,而与电机每转的步数无关9 高启动转速10.高速力矩大一、电气参数输入电压直流18~50V输入输入电流小于4安培输出电流 1.0A~4.2A功耗功耗:80W;内部保险:6A温度工作温度-10~45℃;存放温度-40℃~70℃湿度不能结露,不能有水珠气体禁止有可燃气体和导电灰尘重量200克二、控制信号接口图1是驱动器的接线原理图1、控制信号定义PLS/CW+:步进脉冲信号输入正端或正向步进脉冲信号输入正端PLS/CW-:步进脉冲信号输入负端或正向步进脉冲信号输入负端DIR/CCW+:步进方向信号输入正端或反向步进脉冲信号输入正端DIR/CCW-:步进方向信号输入负端或反向步进脉冲信号输入负端ENA+:脱机使能复位信号输入正端ENA-:脱机使能复位信号输入负端脱机使能信号有效时复位驱动器故障,禁止任何有效的脉冲,驱动器的输出功率元件被关闭,电机无保持扭矩。
2、控制信号连接上位机的控制信号可以高电平有效,也可以低电平有效。
【步进电机及驱动器控制器】3轴控制器使用手册

1
三轴运动控制器操作手册
目录
一 与外部驱动器及IO (输入输出)接线图 (4)
二 用户管理操作 (5)
三 系统参数设置 (7)
四 IO (输入输出)设置 (8)
五 系统自检操作 (10)
六 手动操作
(13)
七编程操作 (15)
八自动执行 (17)
九指令详解 (19)
十电子齿轮计算及公式 (21)
十一编程案例 (24)
十二常见问题及处理 (28)
2
3
旗开得胜一与外部驱动器及IO(输入输出)接线图
1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线)
2.IO(外接开关及继电器)的接线图(红色线为1号线)
4
旗开得胜
注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二用户管理操作
注意:所有重要参数只有用户登录以后才可修改保存。
防止他人随意更改参数,影响加工质量。
从主画面进入参数设置,并进入用户管理,进行密码输入。
5。
步进电机连接方式

步进电机连接方式步进电机是一种可以控制旋转角度的电机,通常被广泛应用于各种自动化设备中。
在实际的电路连接中,步进电机的连接方式有许多种,不同的连接方式会影响到电机的运行效果和控制方式。
下面将介绍一些常见的步进电机连接方式:单极性连接单极性连接是步进电机最简单的连接方式之一,通常只需要四条导线连接到驱动器上。
在这种连接方式下,步进电机的两个相将会被联结在一起,每次只能激活其中一个相,因此也称为单相激励。
这种连接方式操作简单,但是效率较低,精度不高,速度也有限。
双极性连接双极性连接是步进电机的常见连接方式之一,需要八条导线连接到驱动器上。
在这种连接方式下,步进电机的两个相被分开接驳,每次可以同时激活两个相,从而提高了电机的性能和精度。
双极性连接方式适用于一些对精度要求较高的应用场合。
串联连接串联连接是一种将多个步进电机按照一定顺序连接在一起的方式。
通过串联连接,可以将多个步进电机同时工作,从而提高整体的输出功率和扭矩。
这种连接方式适用于一些需要更大功率输出的应用场合,比如重载的自动化设备。
并联连接并联连接是一种将多个步进电机并联在一起工作的方式,通常适用于需要更高速度和精度的场合。
通过并联连接,不仅可以提高整体的输出速度,还可以分担每个电机的负荷,延长电机的使用寿命。
并联连接方式一般需要更多的电路设计和控制技术。
总的来说,步进电机连接方式的选择需要根据具体的应用需求来进行,不同的连接方式会带来不同的性能和效果。
在实际应用中,需要根据具体情况选择合适的连接方式,并结合恰当的控制方法,以达到最佳的工作效果。
步进电机连接方式的选择对于整个自动化系统的稳定性和性能都有着至关重要的影响。
ULN2003步进电机接线图及程序

ULN2003 步进电机驱动板使用说明一、主要技术参数1、工作电压DC 4-12V2、工作电流≤500mA3、适用于2 相5 线步进电机4、带工作指示灯,方便客户观察工作状态。
同时也可以用于板子自测,5-12V 处通上电源后,将电源的正极分别去接IN1-IN4 对应的指示灯会亮,表明板子是好的。
5、ULN2003 最高工作电压可以达到DC30V,如果客户需要接24V等步进电机,需要将板子上的限流电阻加大,以免烧坏工作指示灯。
二、ULN2003 简介和三、驱动板接5V 12V 电机与单片机系统板的连接图式作方工进电、四步机电机可以使用单四拍、双四拍和八拍方式驱动0100、A-B-C-D4.1 单四拍:(00010010、、1000)#include <reg52.h>unsigned char code unsigned char codeF_Rotation[4]={0x01,0x02,0x01,0x08};//正转表格B_Rotation[4]={0x08,0x04,0x02,0x01};//反转表格void Delay(unsigned int i)//延时{while(--i);}main(){unsigned char i; while(1){{ 相for(i=0;i<4;i++) //4可以自行换成反转表格P1=F_Rotation[i]; //输出对应的相改变这个参数可以调整电机转速Delay(500); //}}}1001) 、0110、11004.2 双四拍:AB-BC-CD-DA(0011、正转表#include <reg52.h> unsigned char codeF_Rotation[4]={0x03,0x05,0x0D,0x09};// 反转表格格unsigned char code B_Rotation[4]={0x09,0x0D,0x05,0x03};//延时void Delay(unsigned int i)//{while(--i);}main(){unsigned char i; while(1){{ for(i=0;i<4;i++) //4 相可以自行换成反转表格P1=F_Rotation[i]; //输出对应的相改变这个参数可以调整电机转速Delay(500); //}}}4.3 八拍方式:(0001、0011、0010、0110、0100、1100、1000、A-AB-B-BC-C-CD-D-DA1001)#include <reg52.h>按键控制步进电机的方向sbit key=P2^0; //A AB B BC C CD D DA //八拍方式驱动,顺序为unsigned char code clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d};void Delay(unsigned int i)//延时{while(--i);}void main(){unsigned char i;while(1){for(i=0;i<8;i++){if(key) //按键未按下,正转{P0=clockWise[i];Delay(500);}按键按下,反转else //{P0=clockWise[8-i];Delay(500);}}}。
ULN2003步进电机接线图及程序

ULN2003 步进电机驱动板使用说明一、主要技术参数1、工作电压 DC 4-12V2、工作电流≤500mA3、适用于 2 相 5 线步进电机4、带工作指示灯,方便客户观察工作状态。
同时也可以用于板子自测,5-12V 处通上电源后,将电源的正极分别去接 IN1-IN4 对应的指示灯会亮,表明板子是好的。
5、 ULN2003 最高工作电压可以达到 DC30V,如果客户需要接 24V 等步进电机,需要将板子上的限流电阻加大,以免烧坏工作指示灯。
二、ULN2003 简介三、驱动板接 5V 和 12V 电机与单片机系统板的连接图四、步进电机工作方式电机可以使用单四拍、双四拍和八拍方式驱动4.1 单四拍: A-B-C-D(0001、0010、0100、1000)#include <reg52.h>unsigned char code F_Rotation[4]={0x01,0x02,0x01,0x08};//正转表格 unsigned char code B_Rotation[4]={0x08,0x04,0x02,0x01};//反转表格void Delay(unsigned int i)//延时{while(--i);}main(){unsigned char i;while(1){for(i=0;i<4;i++)//4 相 {P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格Delay(500); //改变这个参数可以调整电机转速}}}4.2 双四拍:AB-BC-CD-DA(0011、0110、1100、1001)#include <reg52.h> unsigned char codeF_Rotation[4]={0x03,0x05,0x0D,0x09};//正转表格 unsigned char code B_Rotation[4]={0x09,0x0D,0x05,0x03};//反转表格void Delay(unsigned int i)//延时{while(--i);}main(){unsigned char i;while(1){for(i=0;i<4;i++)//4 相 {P1=F_Rotation[i]; //输出对应的相可以自行换成反转表格Delay(500); //改变这个参数可以调整电机转速}}}4.3 八拍方式:A-AB-B-BC-C-CD-D-DA(0001、0011、0010、0110、0100、1100、1000、1001)#include <reg52.h>sbit key=P2^0; //按键控制步进电机的方向//八拍方式驱动,顺序为 A AB B BC C CD D DAunsigned char code clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d};void Delay(unsigned int i)//延时{while(--i);}void main(){unsigned char i;while(1){for(i=0;i<8;i++){if(key) //按键未按下,正转{P0=clockWise[i];Delay(500);}else //按键按下,反转{P0=clockWise[8-i];Delay(500);}}}(资料素材和资料部分来自网络,供参考。
P2 P3 运动扩展型接线图、86步进电机与驱动器接线图

PUL+ PULDIR+ DIR-
脉冲正 脉冲负 方向正 方向负
图名 86或110步进电机及驱动器接线说明
日期
版本 C
页码 3/3
制图 LJQ 审核
批准
电机驱动器接线图
控制器的 脚接到继电器驱动电源的
端,继电器线圈的一端接
,
线圈的另一端接输出点 控制器 脚 ,当第一输出点有输出信号时, 脚
输出一个低电平,此时为
,继电器的线圈得到 的工作电压,开关
吸合,即 、 脚导通,当第一输出点没有输出信号时, 脚为悬空状态,
继电器没有工作电压, 、 脚断开。
如图所示,由点动开关给控制器提供输入信号,首先,控制器
86或110步进电机
电机A组线圈 A+ 电机A组线圈 A电机B组线圈 B+ 电机B组线圈 B-
M806或M1106步
进驱动器 ~ 驱动器外接电源AC80V
A+ A-
AC ~~
驱动器外接电源AC80V
PUL+ 脉冲/方向公共正5V(控制器12脚)
PUL- 控制器脉冲信号(控制器10脚)
B+ DIR+
串口 接头
7 供电 8 供电
标准RS232通信接口
9
10
输出电路内结构图
11 12
输入电路内部结构图 13
14
15
16
171819202122232425262728293031323334353637
输入24V地
注意: 1、输入输出信号均为“低电平”有效;