多运动模式轮腿移动机器人的运动学模型构建
轮腿混合移动机器人机构设计及分析
+
电 机 2带 动 大腿 下 摆 角 度 o一 t击
图 7 轮 腿切 换 时 腿 部各 电机 的 控 制 图
4机 器 人 步 态 规划 与 实 验 验证
机 器 人 爬 行 时 步 态 的选 择 关 系 到 机 器 人 运动 时 的稳 定 性 与
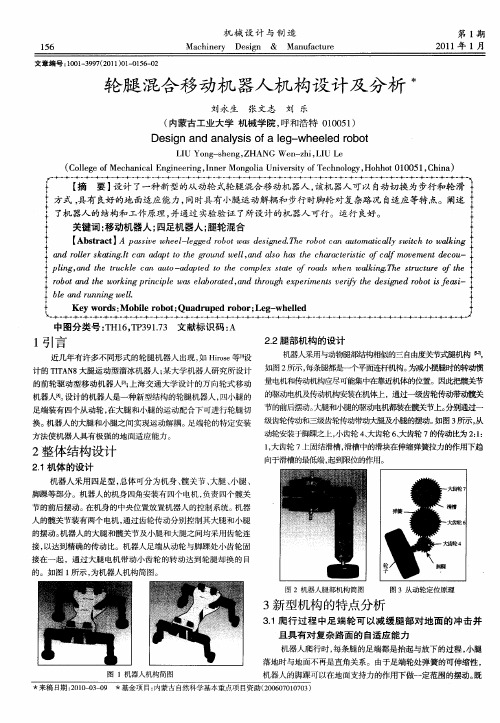
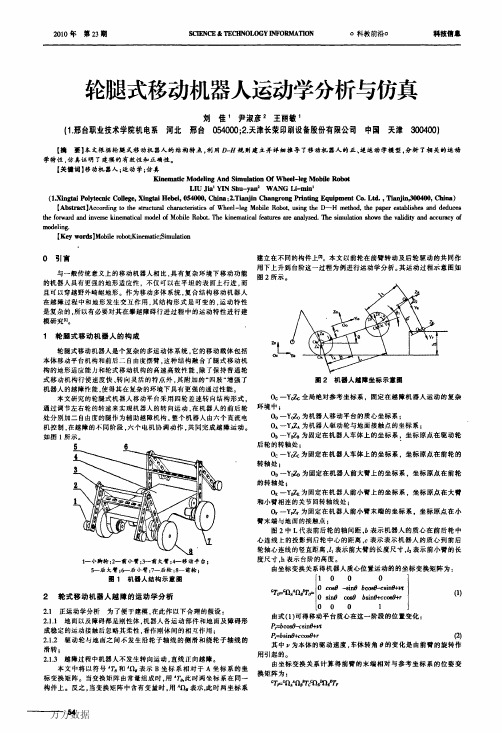
的 。如 图 1 所示 , 机器 人 机构 简 图 。 为
图 2 机 器人 腿 部机 构 简 图 图 3 从 动轮 定 位原 理
3 型机构 的特 点分 析 新
31爬行 过 程 中足端 轮 可 以减缓 腿 部对 地面 的 冲击 并 .
且具有对 复杂路 面的 自适应 能力
机器人爬行时, 每条腿的足端都是抬起与放下的过程 , 小腿 落地时与地面不再是直角关系。由于足端轮处 弹簧的可伸缩性 ,
中图分 类号 : H1 ,P 9 .3 文 献标识 码 : T 6T 3 1 7 A
1 引言
近几年有许多不同形式的轮腿机器人 出现 , H rs 等【 如 i e o 设
22腿 部机构 的设计 _
机器 人 采用与动物腿部结构相似的三 自由度关节式腿机构 酮,
所示 , 每条腿都是—个平面连杆机构。 为减小摆腿时的转动囔 计 的 TT N 大 腿 运 动型 溜 冰机 器 人 ; 大 学机 器 人研 究 所 设 计 如图 2 IA 8 某 量电机和传动机构应尽可能集中在靠近机体的位置。因此把髋关节 的前 轮驱 动 型 移 动机 器 人 上 海 交 通 大 学设 计 的万 向轮 式 移 动 ;
图 1机器人机构简图
机器人的脚踝可以在地面支持力的作用下做一定范围的摆动。 既
★来稿 日期 :0 0 0 — 9 ★基金项 目: 2 1— 3 0 内蒙古 自然科学基本重点项 目资助(0 6 7 17 3 200000 )
多运动模式轮腿移动机器人的运动学分析与

THANKS
感谢观看
02 考虑不确定性的控制策略
考虑到实际应用中存在的不确定性因素,如环境 变化、负载变化等,设计鲁棒性强的控制器和算 法。
03 实时优化的控制策略
根据实时获取的机器人状态信息,对控制策略进 行优化,以提高机器人的运动性能。
不同运动模式下轮腿移动机器人的控制策略
轮式运动模式
在平坦路面或短草地等环境下,机器人主要依靠 轮子进行移动,此时需要保证轮子的转速和方向 控制精确。
多运动模式轮腿移动
机器人的运动学分析
与汇报人:
日期:
目录
• 引言 • 多运动模式轮腿移动机器人的机
构设计 • 多运动模式轮腿移动机器人的运
动学模型建立 • 多运动模式轮腿移动机器人的运
动学特性分析
目录
• 多运动模式轮腿移动机器人的控 制策略研究
• 多运动模式轮腿移动机器人的实 验研究与性能评估
• 结论与展望 • 参考文献
机构设计的基本原则和要求
基本原则
多运动模式轮腿移动机器人的机构设计应遵循结构简单、紧凑、易于制造和维修的原则,同时 要保证机器人的稳定性和可靠性。
要求
在机构设计过程中,需要考虑机器人的运动性能、负载能力、灵活性、耐用性等方面的要求, 并针对不同的应用场景和任务需求进行优化和改进。
典型多运动模式轮腿移动机器人的机构组成
确定运动学参数
通过实验或计算的方 法,确定机器人的运 动学参数,如轮子和 腿的长度、角度以及 机器人的质量等。
验证模型
机器人的运动学和动力学模型

机器人的运动学和动力学模型机器人的运动学和动力学是研究机器人运动和力学性质的重要内容。
运动学是研究机器人姿态、位移和速度之间关系的学科,动力学则是研究机器人运动过程中力的产生和作用的学科。
机器人的运动学和动力学模型可以帮助我们理解机器人的运动方式和受力情况,进而指导机器人的控制算法设计和路径规划。
一、机器人运动学模型机器人运动学模型是描述机器人运动方式和位置关系的数学表达。
机器人的运动状态可以用关节角度或末端执行器的位姿来表示。
机器人的运动学模型分为正运动学和逆运动学两种。
1. 正运动学模型正运动学模型是通过机器人关节角度或末端执行器的位姿来确定机器人的位置。
对于串联机器人,可以使用连续旋转和平移变换矩阵来描述机械臂的位置关系。
对于并联机器人,由于存在并联关节,正运动学模型比较复杂,通常需要使用迭代方法求解。
正运动学模型的求解可以通过以下几个步骤:(1) 坐标系建立:确定机器人的基坐标系和各个关节的局部坐标系。
(2) 运动方程描述:根据机器人的结构和连杆长度等参数,建立各个关节的运动方程。
(3) 正运动学求解:根据关节的角度输入,通过迭代计算,求解机器人的末端执行器的位姿。
正运动学模型的求解可以用于机器人路径规划和目标定位。
2. 逆运动学模型逆运动学模型是通过机器人末端执行器的位姿来确定机器人的关节角度。
逆运动学问题在机器人的路径规划和目标定位等任务中起着重要作用。
逆运动学求解的难点在于解的存在性和唯一性。
由于机器人的复杂结构,可能存在多个关节角度组合可以满足末端执行器的位姿要求。
解决逆运动学问题的方法有解析法和数值法两种。
解析法通常是通过代数或几何方法,直接求解关节角度,但是解析法只适用于简单的机器人结构和运动方式。
数值法是通过迭代计算的方式,根据当前位置不断改变关节角度,直到满足末端执行器的位姿要求。
数值法可以用于复杂的机器人结构和运动方式,但是求解时间较长。
二、机器人动力学模型机器人动力学模型是描述机器人运动时受到的力和力矩的模型。
机器人运动学模型的建立与应用

机器人运动学模型的建立与应用在当今科技飞速发展的时代,机器人已经成为了各个领域中不可或缺的一部分。
从工业生产中的自动化装配线,到医疗领域的精准手术机器人,再到家庭服务中的智能机器人,它们的身影无处不在。
而机器人能够实现如此多样化和复杂的任务,离不开其背后的关键技术之一——运动学模型的建立与应用。
要理解机器人的运动学模型,我们首先需要知道什么是运动学。
简单来说,运动学是研究物体在空间中的位置、速度和加速度等运动参数之间关系的学科。
对于机器人而言,运动学模型就是描述机器人各个关节的位置、速度和加速度与机器人末端执行器(比如机械手的爪子)在空间中的位置、姿态之间关系的数学模型。
建立机器人运动学模型的第一步是对机器人的结构进行分析和描述。
常见的机器人结构可以分为串联型和并联型。
串联型机器人就像人的手臂一样,关节依次连接,而并联型机器人则有多个分支同时支撑着末端执行器。
不同的结构有着不同的运动学特性,因此需要采用不同的建模方法。
以串联型机器人为例,我们通常使用DenavitHartenberg(DH)参数法来建立其运动学模型。
这种方法通过定义一系列的坐标系和参数,来描述相邻关节之间的相对位置和姿态关系。
通过依次计算每个关节的变换矩阵,最终可以得到从机器人基座到末端执行器的总变换矩阵。
这个总变换矩阵就包含了末端执行器在空间中的位置和姿态信息。
建立好运动学模型后,我们就可以利用它来进行各种应用。
其中一个重要的应用是机器人的运动规划。
运动规划的目的是为机器人找到一条从起始位置到目标位置的最优路径,同时要满足各种约束条件,比如关节的运动范围、速度限制、避障等。
通过运动学模型,我们可以计算出在不同关节位置下末端执行器的位置和姿态,从而评估不同路径的可行性和优劣。
另一个应用是机器人的控制。
在实际控制中,我们需要根据期望的末端执行器位置和姿态,计算出各个关节应该运动的角度、速度和加速度等参数。
这就需要通过运动学模型的逆解来实现。
《新型轮腿式机器人的设计与仿真》范文

《新型轮腿式机器人的设计与仿真》篇一一、引言随着科技的不断发展,机器人技术已成为当前研究的热点领域。
新型轮腿式机器人作为机器人技术的一种重要形式,具有移动灵活、适应性强等优点,在军事、救援、勘探等领域具有广泛的应用前景。
本文旨在介绍一种新型轮腿式机器人的设计与仿真过程,以期为相关研究提供参考。
二、设计目标与原理新型轮腿式机器人的设计目标在于实现高效、灵活的移动能力,以适应复杂多变的环境。
设计原理主要基于多模式运动机制,即轮式运动和腿式运动的有机结合。
在平坦路面上,机器人采用轮式运动以提高移动速度;在复杂地形或需要跨越障碍物时,机器人则切换为腿式运动,以实现灵活的移动。
三、结构设计新型轮腿式机器人的结构主要包括轮式模块、腿式模块、驱动模块、控制模块等部分。
其中,轮式模块采用多轮驱动的设计,以提高机器人的稳定性和移动速度;腿式模块采用仿生学原理设计,模仿生物的腿部结构,以实现灵活的移动;驱动模块负责驱动机器人的各个部分,包括电机、传动装置等;控制模块负责控制机器人的运动和行为,包括传感器、控制器等。
四、仿真实验为了验证新型轮腿式机器人的设计效果,我们进行了仿真实验。
仿真实验主要采用动力学仿真软件进行,通过建立机器人的三维模型,模拟机器人在不同环境下的运动情况。
仿真实验结果表明,新型轮腿式机器人在平坦路面上具有较高的移动速度和稳定性,同时在复杂地形和障碍物环境下也能实现灵活的移动。
此外,我们还对机器人的能耗、负载能力等性能进行了评估,为后续的优化提供了依据。
五、结果与讨论通过仿真实验,我们得出以下结论:新型轮腿式机器人具有高效、灵活的移动能力,能够适应复杂多变的环境;机器人的轮式运动和腿式运动有机结合,实现了多模式运动机制;机器人的结构设计和控制策略有待进一步优化,以提高机器人的性能和适应能力。
此外,我们还可以从以下几个方面对新型轮腿式机器人进行改进:1. 优化驱动模块:采用更高效的电机和传动装置,提高机器人的动力性能和能耗效率。
轮式移动机器人动力学建模与运动控制技术

WMR具有结构简单、控制方便、运动灵活、维护容易等优点,但也存在一些局限性,如对环境的适应性、运动稳定性、导航精度等方面的问题。
轮式移动机器人的定义与特点特点定义军事应用用于生产线上的物料运输、仓库管理等,也可用于执行一些危险或者高强度任务,如核辐射环境下的作业。
工业应用医疗应用第一代WMR第二代WMR第三代WMRLagrange方程控制理论牛顿-Euler方程动力学建模的基本原理车轮模型机器人模型控制系统模型030201轮式移动机器人的动力学模型仿真环境模型验证性能评估动力学模型的仿真与分析开环控制开环控制是指没有反馈环节的控制,通过输入控制信号直接驱动机器人运动。
反馈控制理论反馈控制理论是运动控制的基本原理,通过比较期望输出与实际输出之间的误差,调整控制输入以减小误差。
闭环控制闭环控制是指具有反馈环节的控制,通过比较实际输出与期望输出的误差,调整控制输入以减小误差。
运动控制的基本原理PID控制算法模糊控制算法神经网络控制算法轮式移动机器人的运动控制算法1 2 3硬件实现软件实现优化算法运动控制的实现与优化路径规划的基本原理路径规划的基本概念路径规划的分类路径规划的基本步骤轮式移动机器人的路径规划方法基于规则的路径规划方法基于规则的路径规划方法是一种常见的路径规划方法,它根据预先设定的规则来寻找路径。
其中比较常用的有A*算法和Dijkstra算法等。
这些算法都具有较高的效率和可靠性,但是需要预先设定规则,对于复杂的环境适应性较差。
基于学习的路径规划方法基于学习的路径规划方法是一种通过学习来寻找最优路径的方法。
它通过对大量的数据进行学习,从中提取出有用的特征,并利用这些特征来寻找最优的路径。
其中比较常用的有强化学习、深度学习等。
这些算法具有较高的自适应性,但是对于大规模的环境和复杂的环境适应性较差。
基于决策树的路径规划方法基于强化学习的路径规划方法决策算法在轮式移动机器人中的应用03姿态与平衡控制01传感器融合技术02障碍物识别与避障地图构建与定位通过SLAM(同时定位与地图构建)技术构建环境地图,实现精准定位。
轮腿式移动机器人的运动学分析
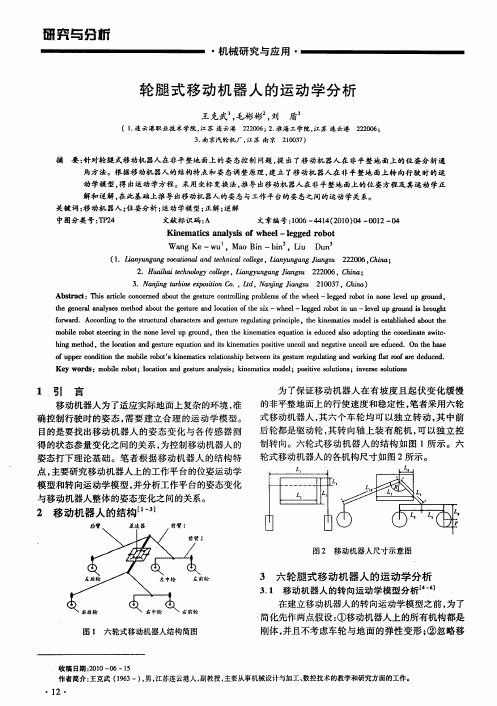
( .L nug n ct nl n cncl ol e La yn agJagu 22 0 , hn 1 i yn agv ai a dt h i lg , inug n i s 2 06 C i a o o a e ac e n a;
2 .Hn ia eh oo ycl g ,La g u g n in s 2 2 0 a h i c n lg ol e in y n a g Ja gu 2 0 6,C ia; t e hn
3 aj gt b ee oi nC . Ld N nn i gu 2 03 C i ) .N nn ri x si o , i , aj gJ n s 10 7, hn i u n p t o i a a
Ab t a t h s a t l o o r e b u e g su e c n rl n r be f h h e —lg e o o n n n e e p go n sr c :T i r c e e n ln d a o tt e tr o t l g p o lmso e w e l e g d r b ti o e lv lu ru d, i  ̄ h oi t t e g n rla ay e t o b u h e t r n ain o i — h e — lg e o o ・lv lu r u d i b o g t h e ea n s smeh d a o t e g s e a d l t ft sx— w e l - e g d rb ti u - e e p g o n r u h l t u c o o e h nn s fr ad o w r .Ac od n o t e sr cu a h r ce s a d g s r e ua ig p i cp e h e kn maismo e se tb ih b u e c r ig t t t l a a tr e t e r g l t rn il ,t i e t d l sa l e a o t h h u r c n u n c i sd t mo i o ts e i g i o e lv lu r u d,t e h n mai se u t n i d c d as d pi g t e c o dn t w t - bl r b t rn n t n n e p go n e o e e h e h n t e k e t q ai se u e l a o t h o r i ae s i i c o o n c
机器人动力学模型和运动学模型的建立PPT课件
智能控制 对模型不确定,环境交互作用位置 情况可用,满足社会发展需求
2021
4
机器人模型的建立
❖ 2.1 机器人数学基础 ❖ 2.2 机器人运动学模型 ❖ 2.3 机器人动力学模型
2021
5
2.1 机器人数学基础
❖ (1)位姿描述
1.位置的描述 刚体的位置可用它在某个坐标系中的向量来描述。
乘上一个齐次变换的逆,达到分离变量的目的。
2.几何法 通过几何图形求解角度值,求解过程中利用正弦定理、余
弦定理、反正切公式等求解角度。
2021
14
2.3 机器人动力学模型
机器人动力学正向问题:已知机器Байду номын сангаас各关节所需
机 器
的驱动力或力矩,求解机器人各关节的位移、速度 和加速度。从控制角度讲,正向问题用于运动的动 态仿真。
2021
12
机器人运动学方程建立
对于具有n个连杆的机械手,运动学方程是要确定与末端坐标 系{n}固联的手爪相对于基坐标系{0}的变换。根据其次变换的乘 法规则可得:
式中, 表示末端坐标系{n}相对于基座{0}的位姿。
2021
13
机器人运动学方程求解
1.代数法 代数法求解过程中,通过逐次在运动学方程式的两边同时
2.方位的描述 刚体的方位也称刚体的姿态。
2021
6
❖ (2)坐标变换
坐标变换包括平移变换和旋转变换。 1.平移变换
2.旋转变换
3.复合变换:平移与旋转的结合
2021
7
❖ (3)齐次坐标变换
齐次坐标定义:用四维向量表示三维空间一点的位置P,即
上式称为齐次坐标,其中w为非零常数。
机器人机构学【ch09】移动机器人的运动机构 培训教学课件

谢谢观看
轮子的类型
目前,轮子主要有4种类型,如图9-25所示。
轮式移动机器人
在运动学方面,它们差别很大,因此,轮子类型的选择对轮式移动机器人的 运动有很大的影响。标准轮和小脚轮均有一个旋转主轴,是高度有向的,如 果沿指定的方向运动,必须操纵垂直于移动表面的主轴,以改变轮子方向。 这两种轮的主要差别在于:操纵标准轮时无附加作用,因为操纵杆的旋转中 心经过标准轮与地面的接触点;而小脚轮的操纵轴与地面接触点有一定的距 离,在操纵小脚轮过程中会引起附加力矩,该力矩作用到机器人的底盘。
轮式移动机器人
常见的轮式移动机器人底盘结构(运动机构形式)
轮式移动机器人轮子类型的选择与底盘结构紧密相关,开发人员在设计轮式移动机器人 运动机构时必须同时考虑这两个问题,因为这涉及它的机动性、可控性和稳定性。 汽车多数基于高度标准化的公路网络而设计,而轮式移动机器人的设计需要考虑到各种 纷繁复杂的环境。汽车底盘一般采用相似的轮子结构,因为标准化环境(铺好的公路)所给 予的充分设计空间可使汽车的机动性、可控性和稳定性最大。
腿式移动机器人
对于腿式移动机器人,一般要求至少有2个自由度,通过提腿和摆腿使机器人移动,如图9-5所示。
腿式移动机器人
稍复杂的腿,附加了第3个自由度,如图9-6所示。
腿式移动机器人 步态规划
支撑相:腿部着地的状态。
摆动相:腿由地面抬起,处于悬空的状态。
占空系数:在一个步态周期T内,机器人各腿处于支撑 相的时间占该步态周期的比例,如果各腿占空系数不相 等,则分别表示。 规则步态:机器人的腿部按固定的顺序和轨迹运动的过 程,这种步态呈周期性的变化,也称周期步态。 非规则步态:机器人腿部运动的顺序和轨迹是不固定的, 机器人能够根据传感器获取的地面状况和自身状态,实时 改变各条腿的摆动次序以及运动轨迹。
机器人的运动学和动力学模型是什么
机器人的运动学和动力学模型是什么机器人的运动学和动力学模型是为了描述机器人运动和力学特性而建立的数学模型。
运动学模型描述机器人的位姿、速度和加速度,而动力学模型则描述机器人的力、力矩和力的影响。
本文将详细介绍机器人的运动学和动力学模型,包括其定义、应用和建模方法。
一、运动学模型1. 定义机器人的运动学模型用于描述机器人的位姿、速度和加速度之间的关系。
位姿是机器人在三维空间中的位置和方向,速度是机器人在时间上的位置变化率,加速度是速度的变化率。
运动学模型可以帮助我们理解机器人的运动规律,例如机器人的轨迹、路径和姿态等。
2. 应用运动学模型在机器人领域有广泛的应用。
首先,它可以用于路径规划和轨迹跟踪。
通过建立机器人的运动学模型,我们可以预测机器人在不同环境下的运动轨迹,从而实现有效的路径规划和轨迹跟踪。
其次,运动学模型可以用于机器人的姿态控制。
通过了解机器人的位姿、速度和加速度之间的关系,我们可以设计控制算法,实现机器人在不同姿态下的运动控制。
此外,运动学模型还可以用于机器人的碰撞检测和避障。
通过分析机器人的运动学特性,我们可以预测机器人的碰撞风险,并采取相应的避障策略。
3. 建模方法机器人的运动学模型可以通过几何方法、代数方法和向量方法进行建模。
几何方法是最常用的建模方法之一。
它通过描述机器人的几何特征和运动规律来建立运动学模型。
例如,可以使用笛卡尔坐标系和欧拉角来描述机器人的位姿,使用导数和积分来描述机器人的速度和加速度。
代数方法是另一种常用的建模方法。
它通过代数方程和矩阵运算来描述机器人的位姿、速度和加速度之间的关系。
例如,可以使用坐标变换和雅可比矩阵来描述机器人的运动规律。
向量方法是较新的建模方法之一。
它通过向量运算和微分几何来描述机器人的位姿、速度和加速度之间的关系。
例如,可以使用四元数和向量叉乘来描述机器人的姿态和运动规律。
二、动力学模型1. 定义机器人的动力学模型用于描述机器人的力、力矩和力对机器人的影响。
《新型轮腿式机器人的设计与仿真》范文

《新型轮腿式机器人的设计与仿真》篇一一、引言随着科技的不断发展,机器人技术已经成为现代工业、军事、医疗等多个领域的重要应用。
其中,移动机器人技术更是机器人领域的重要研究方向。
传统轮式和腿式机器人各自有着各自的优缺点,轮式机器人适合于在平坦地面上进行高速、长距离移动,而腿式机器人则能在复杂地形上具有更强的适应能力。
为了结合两者的优点,新型轮腿式机器人应运而生。
本文将介绍一种新型轮腿式机器人的设计与仿真过程。
二、设计目标与原理新型轮腿式机器人设计的主要目标是实现高效、灵活的移动能力,使其能够在平坦和复杂地形上都具有出色的表现。
设计原理是结合轮式和腿式机器人的优点,通过独特的机械结构设计,使机器人能够在不同地形上进行灵活的移动。
同时,通过高精度的控制系统,实现机器人的稳定性和灵活性。
三、机械结构设计1. 轮腿结构设计新型轮腿式机器人采用独特的轮腿结构设计,使机器人能够在不同地形上进行灵活的移动。
轮腿结构由轮子和腿部组成,通过电机驱动实现轮腿的切换。
在平坦地面上,机器人采用轮式移动方式,提高移动速度和效率;在复杂地形上,机器人切换为腿式移动方式,实现灵活的移动和越障能力。
2. 驱动系统设计驱动系统是新型轮腿式机器人的重要组成部分,包括电机、传动系统和控制系统。
电机采用高性能无刷电机,具有高转矩和高效率的特点;传动系统采用齿轮和皮带等传动元件,实现电机与轮腿的连接;控制系统采用先进的控制算法,实现机器人的稳定性和灵活性。
四、仿真分析为了验证新型轮腿式机器人的设计效果和性能,我们进行了仿真分析。
仿真软件采用专业的机器人仿真软件,建立了机器人的三维模型和仿真环境。
通过对机器人在不同地形上的移动过程进行仿真,我们可以分析机器人的运动性能、稳定性和灵活性等方面的表现。
仿真结果表明,新型轮腿式机器人在平坦地面上具有较高的移动速度和效率,同时在复杂地形上具有出色的适应能力和越障能力。
机器人的运动性能稳定,控制系统能够实时调整机器人的运动状态,实现灵活的移动。
轮式移动机器人的结构设计

目录1 前言 (2)2 机构的驱动方案设计 (5)2.1 机器人运动方式的选择 (5)2.2 轮式机器人驱动方案设计 (9)2.2.1轮式机器人驱动轮组成 (10)2.2.2轮式机器人转向轮组成 (11)2.2.3电机选择 (12)2.2.4减速机构的设计 (17)2.2.5变速箱体、前车体及电池箱 (18)2.2.6后减震及前减震机构 (19)2.2.7车轮和轮毂 (20)3 传动机构、执行机构的设计及受力分析 (23)3.1 传动机构的设计 (23)3.2 执行机构的设计 (24)3.3 机器人受力分析及如何保证加速度最优 (24)4 轮式移动机器人的运动学分析 (26)4.1 轮式式机器人的运动学建模 (26)4.2 阿克曼约束的机器人运动模型 (29)5 轮式移动机器人的运动控制系统设计 (32)5.1 控制系统硬件设计 (32)5.2 控制系统软件设计 (34)5.2.2上位机控制系统软件设计 (34)5.2.3下位机控制系统软件设计 (34)6 结论 (36)参考文献 (37)致谢 (38)1 前言移动机器人的研究始于上世纪60年代末期,随着计算机技术、传感器技术以及信息处理技术的发展,移动机器人已被广泛应用于工业、农业、医疗、保安巡逻等行业。
机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,也同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中,各国加强了经济的投入,就加强了本国的经济的发展。
另一方面它也是生产力发展的需求的必然结果,也是人类自身发展的必然结果,那么人类的发展随着人们这种社会发展的情况,人们越来越不断探讨自然过程中,在改造自然过程中,认识自然过程中,实现人们对不可达世界的认识和改造,这也是人们在科技发展过程中的一个客观需要。
国外对于移动机器人的研究起步较早,日本是开发机器人较早的国家,并成为世界上机器人占有量最多的国家,其次是美国和德国。
轮腿式移动机器人运动学分析与仿真
科技信息0科教前沿02010年第23期000c∞(“巩+蚴-sin(O+Ol+蚴如∞(肌口I+蚴+fleos(O+Oi)+LcosO+以sin(O+Ol+80cos(O+Ol+母0拓in(口+pI删+llsin(O+01)+LsinO+rOO1由于在此过程中前臂末端与参考坐标系在z方向上相对速度为零.所以町得Prz=12(oJ+Ol+的sin(“岛+∞+f1∞+矾)sin(O+01)+/xosin0=0(4)若台阶高度车体速度和转角0,,巩的变化规律已知,则可以由式(4)得到车体转角0的运动规律,进而由式(3)推导出质心位置在这一阶段的运动规律。
2.2逆运动学分析轮腿式移动机器人在越障过程中可以通过调节其相应的运动可控馈,对心以一定的越障行为翻越障碍。
为了实现机器人平稳越障。
减轻震动,保证移动载体的稳定性,就要求在越障过程中,机器人要通过控制其可变的结构保持机体重心以低缓的方式平稳上升以越过障碍。
机器人通过安装在其机体上的外部传感器可以感知地形障碍的特征及大致参数。
当获知运动前方待翻越的地形障碍特征要素后,便可以规划相应平缓的机器人重心越障轨迹。
为了控制机器人以一定的位姿跟踪该莺心连续轨迹,需要根据此条件下所要求的车体质心的速度和方位来确定驱动轮的转速,以使得机器人顺利平稳的翻越障碍。
为此进行相应控制变鼍的逆向求解。
设机器人移动平台质心的佗置和方位角为(R只,0)T,速度为(%%铆7;后轮中心坐标系B的速度为(y两'I,。
∥)7,根据刚体运动原理,有…一『y毋1一『b1V=y—xePo=ly匠l+to×Ic(5)【埘J【0J由式(5)可得驱动轮的速度:[cosO-sinO0]『L—幽1『oo颤y—J6)-sinO(V:-∽)]G萨IsinOcosO0K—雠l=lsino(P厂讪)+co咧PI_戗)l(6)【001儿∞J【∞J由于驱动轮做纯滚动,则驱动轮转速为:ta口=cosO(Vf-tob)-sinO(V:..cac).∽由于在越障过程中前臂和地形发生作用时.前臂的末端与地形障碍保持接触的运动约束限制,此时前臂与地面的接触点在其自身坐标系的z方向上相对参考坐标系的速度为零.则有转角速度都是未知的,同时限于篇幅,所以仅以晚做匀速运动,求0。
轮腿式机器人运动学分析及其步态规划

0 引言目前,智能机器人领域的发展呈现多元化、智能化等趋势,机器人产业得到极大发展,各种可移动机器人陆续被研制出来协助人们的生产和生活,使用移动机器人替代人类在各领域工作的研究也吸引了诸多学者的关注 [1]。
按照移动机器人结构的不同,可将其分为轮式、腿式、履带式机器人等[2]。
面对较为复杂的路面,传统的依靠单一移动模式的机器人逐渐难以满足需求。
因此,复合式地面移动机器人成为重点研究热点[3]。
目前,轮腿式结构主要有3种,轮子安装在机器人腿的末端,轮腿步态转换依靠末端轮子的收放;轮子与机器人腿结构分开,轮腿步态转换依靠各机构独自运行[4];轮腿混合机构,该机构具有轮式与腿式机器人的部分特征,轮腿步态不严格区分。
这3种轮腿机器人结构提高了机器人在非结构特种环境下的运动性能。
轮腿式机器人兼具轮式机器人的快速性、平稳性以及腿式机器人的高越障性,可以随外界环境调整自己的运动姿态,已经成为移动机器人领域一个充满活力、具有挑战性的前沿发展方向[5]。
本文设计了一种多功能、可实现构型切换、可搭载末端夹取装置的轮腿式机器人,该轮腿机器人拥有4条肢体,每条肢体都是由关节模块和碳纤维连接板组成的三自由度机械腿,通过仿真和试验分析来验证其稳定性。
1 机器人机械结构设计1.1 躯体结构设计轮腿机器人躯体部分主要由碳纤维板和亚克力板构成,在机壳前端头部安装有双目相机,在后端装有躯体轮;躯体内部布置有电池组、上位机和下轮腿式机器人运动学分析及其步态规划陈耀轩1 周子尧1 王峥宇1 梅 杰1,2 陈 昆1,21武汉理工大学交通与物流工程学院 武汉 430063 2武汉理工大学智能制造与控制研究所 武汉 430063摘 要:文中提出了一种可实现构型切换的轮腿式机器人,能根据地形的不同切换为不同的构型,且前腿末端可与夹取装置相结合,能够通过变换姿态构型将前腿用作机械臂,通过配合前臂关节与末端夹取装置协调运动以实现远程代替人工进行作业的功能;对轮腿机器人在运动过程中进行单腿的正/逆运动学分析;对轮腿机器人进行了CPG步态规划和可操作性仿真分析。
《多运动模态轮腿分离四足移动机器人动力学研究》范文

《多运动模态轮腿分离四足移动机器人动力学研究》篇一一、引言随着科技的进步和机器人技术的不断发展,移动机器人已成为众多领域中不可或缺的智能设备。
其中,四足移动机器人凭借其稳定、灵活以及多模态运动的特性,成为了众多研究的焦点。
本研究致力于对多运动模态轮腿分离四足移动机器人动力学进行研究,以提高其运动性能及适应性。
二、多运动模态轮腿分离四足移动机器人概述多运动模态轮腿分离四足移动机器人是一种新型的移动机器人,其特点在于具有轮式和腿式两种运动模态。
在平坦的地面上,机器人可以像传统轮式机器人一样快速移动;在复杂地形中,机器人则能像四足动物一样灵活移动。
这种特殊的结构设计,使机器人在面对复杂多变的环境时具有更高的适应性和灵活性。
三、动力学模型构建为深入理解多运动模态轮腿分离四足移动机器人的运动特性,本研究首先构建了其动力学模型。
模型基于拉格朗日方程,并考虑了机器人的结构特点、关节动力学以及地形的动态影响。
在建模过程中,我们将机器人的运动分为垂直、水平以及旋转三个方向,并分别建立了相应的动力学方程。
四、动力学分析在动力学模型的基础上,我们进行了深入的动力学分析。
首先,我们分析了机器人在不同地形条件下的运动特性,包括平坦地面和复杂地形中的速度、加速度以及稳定性等。
其次,我们研究了机器人的关节动力学,包括关节的力矩、速度以及角度等参数对机器人运动的影响。
最后,我们还探讨了机器人的能量消耗问题,包括在不同运动模态下的能量消耗情况以及如何优化能量消耗等问题。
五、实验验证为验证所建立的动力学模型的准确性,我们进行了大量的实验研究。
实验中,我们首先在平坦地面上测试了机器人的速度、加速度以及稳定性等性能指标;然后,在复杂地形中测试了机器人的灵活性和适应性等性能指标。
实验结果表明,所建立的动力学模型能够较好地描述机器人的运动特性,并为后续的优化设计提供了理论依据。
六、结论与展望本研究对多运动模态轮腿分离四足移动机器人的动力学进行了深入研究。
全轮转向移动机器人运动学建模及机动性研究

全轮转向移动机器人运动学建模及机动性研究随着科技的不断发展,移动机器人在工业、军事、医疗等领域的应用越来越广泛。
全轮转向移动机器人作为一种灵活且机动性强的机器人,受到了研究者们的广泛关注。
全轮转向移动机器人具备四个独立驱动的轮子,并且每个轮子均可独立转动。
这种机构设计使得机器人可以在水平面上实现前进、后退、平移、旋转等多种运动方式,具备了较强的机动性。
因此,对全轮转向移动机器人的运动学建模及机动性研究显得尤为重要。
首先,对全轮转向移动机器人进行运动学建模。
运动学建模是描述机器人运动的数学模型。
对于全轮转向移动机器人而言,需要考虑每个轮子的转角以及机器人的速度控制。
通过建立适当的数学模型,可以得到机器人的位姿与轮子转动之间的关系。
运动学建模不仅可以帮助我们理解机器人的运动规律,还可以为机器人的路径规划、运动控制等方面提供基础支持。
其次,研究全轮转向移动机器人的机动性。
机动性是指机器人在运动过程中的灵活性和可操作性。
全轮转向移动机器人由于具备独立转动的轮子,因此可以实现更加复杂的运动方式,如平稳的转弯、精准的定位等。
通过研究机器人的机动性,可以优化机器人的运动控制算法,提高机器人的运动能力。
最后,应用全轮转向移动机器人的运动学建模及机动性研究成果。
全轮转向移动机器人的应用领域十分广泛,如工业生产线上的物料搬运、仓库内的货物整理、医院内的病床运送等。
通过研究全轮转向移动机器人的运动学建模及机动性,可以为这些应用场景提供技术支持,实现自动化、智能化的操作。
综上所述,全轮转向移动机器人的运动学建模及机动性研究对于提高机器人的运动能力、优化运动控制算法具有重要意义。
通过深入研究,我们可以更好地理解和应用全轮转向移动机器人,为各个领域的自动化操作提供强有力的支持。
机器人运动学建模与优化设计
机器人运动学建模与优化设计近年来,机器人技术的发展突飞猛进,已经渗透到各个领域,为人类的生活和生产带来了巨大的变革。
机器人的运动学建模和优化设计是机器人技术中的重要环节,它们在机器人的精确控制和高效运动中起着关键作用。
本文将从机器人运动学建模和优化设计两个方面展开讨论。
一、机器人的运动学建模机器人的运动学建模是指通过数学方法和模型,描述和分析机器人的运动和姿态。
它是实现机器人自主控制和规划路径的基础。
机器人运动学建模的核心是描述机器人的关节坐标和末端执行器的位置关系。
1. 关节坐标描述关节坐标是指机器人中各个关节角度的表示,它决定了机器人的姿态和运动范围。
常用的关节坐标表示方法有欧拉角和四元数。
欧拉角是通过三个旋转角度描述的,含有明确的物理意义,适用于简单的机器人模型。
而四元数是一种复数的扩展,可以更灵活地表示机器人的姿态,适用于复杂的机器人模型。
2. 正运动学模型正运动学模型描述了机器人末端执行器相对于基座的位置和姿态,也就是机器人的正向运动学问题。
正运动学模型可以由关节坐标表示,根据机器人的几何特征和连杆的长度关系,通过正逆求解的方法得到末端执行器的位置和姿态。
3. 逆运动学模型逆运动学模型是指根据末端执行器的位置和姿态,求解机器人各个关节坐标的问题。
逆运动学模型的求解是一个非线性优化问题,可以通过解析方法、数值方法或者混合方法来求解。
逆运动学模型的求解对于机器人轨迹规划和运动控制具有重要意义。
二、机器人的优化设计机器人的优化设计是在满足机器人性能要求的条件下,寻找最佳的设计参数和结构。
优化设计可以提高机器人的运动精度、负载能力和力矩稳定性等性能指标。
1. 优化设计参数机器人的优化设计参数包括结构参数和控制参数。
结构参数是指机器人的连杆长度、关节间隙等几何特性,它们直接影响机器人的运动学和动力学性能。
控制参数是指机器人的控制策略和算法,包括位置控制、力矩控制等。
优化设计需要在这些参数中寻找最佳的组合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2.7) 数学软件仿真结果如图 4 所示:
、l4 为
常量。转角 θi 为关节变量,通过的转角 θ 的 变化,来完成机器人的各种旋转动作,从而 机器人可以到达一定的运动空间。 2. 多运动模式移动机器人运动学方程求建 (Solution for forward kinematics) 通常把描述一个连杆坐标系与下一个 连杆坐标系间相对关系的齐次变换矩阵称 为 Ai 变换矩阵, 简称 Ai 矩阵。A1 矩阵表示 第一个连杆坐标系相对固定坐标系的位姿; A2 矩阵表示第二个连杆坐标系相对第一个 连杆坐标系的位姿;Ai 表示第 i 个连杆相对 于第 i-1 个连杆的位姿变换矩阵。那么, 第 二个连杆坐标系在固定坐标系中的位姿可 用 A1 和 A2 的乘积来表示,即: T2 A1 A2 , 依此类推 , 对于本例六足机器人 , 则有下列 矩阵: T4 A1 A2 A3 A4 。 下面将结合数学模型与三维模型, 对六 足机器人的变形腿的正解结果, 进行具体地 仿真验证。
1 前言(Introduction)
*
多足动物在移动时, 整体机构存在移动 部和支撑部, 移动部向前迈进的同时, 支 撑部负责支撑并配合整个躯体向前移动, 多 足仿生机器人即模仿多足动物进行移动的 机器人,如四足哺乳动物,六足昆虫,八足 爬行动物等,具有良好的稳定性,不易于发 生侧翻倾覆等,可灵活运动,应用性较强。 因多足仿生机器人关节数目较多, 其拓扑机
三维模型软件所作位姿及轨迹仿真结 果如图 5 所示:
由图 2.28 匀速模拟结果可知, 腿部机构
3
宋孟军 王旭龙
周海松等:多运动模式轮腿移动机器人机构运动学研究 图 6 多运动模式轮腿移动机器人并联机构构 型图 Fig.6. Kinematic model of the multi-motion mode bionic robot
运动学,数学软件和三维模型软件仿真,结 果完全相吻合, 再次表明运动学构建方法和 所求结果的正确性。
图 2.28 四角度输入匀速模拟图 Fig.2.21 Four angles input of uniform mimic diagram
如图 5 所示, 多运动模式轮腿移动机器 人并联机构全局坐标系的起始坐标系 (Ox0y0z0) 构建于多运动模式轮腿移动机器 人机身的几何中心,即将定平台设为机身, 将动平台设为地面, 这主要是依据运动的相 对性和仿生学原理而建立。 图 6 所示并联机 构三分支在上平台彼此夹角为 120°,且各 坐标系系统的构建方式相同。 2.2 动 平 台 运 动 学 模 型 构 建 (Kinematics model of top platform) 如图 5 所示, 多运动模式轮腿移动机器 人并联机构 3 个分支的初始位姿对称分布, 应用前面第 1 小节的运动学求解方法, 求解 该并联机构各分支的运动学正解。 除第一关 节坐标变换外, 其余各关节坐标变换分别具 有相同的变换矩阵,如式(1)。
Abstract:Based on the walking mechanism and the researching method for the serial-parallel mechanism, one multi-sports mode wheel-leg mobile robot was proposed in this paper; Firstly, the serial mechanism model of one leg was constructed, and the method for constructing the kinematic model of the single leg mechanism was studied; Secondly, based on the study work of the single leg mechanism, the kinematic model of the parallel mechanism of the multi-sports mode wheel-leg mobile robot was furtherly constructed when the robot was in the support state; Finally, based on the methods and theories discussed above, the experimental prototype mobile robot was constructed, so feasibility of the proposed method was verfied. Key words: wheel-leg robot; Mechanism; Kinematics; Multi-sports mode
宋孟军 王旭龙
周海松等:多运动模式轮腿移动机器人机构运动学研究
1 单 腿 串 联 机 构 的 求 解 (Rapid
approaches for sloving serial kinematics models of robots)
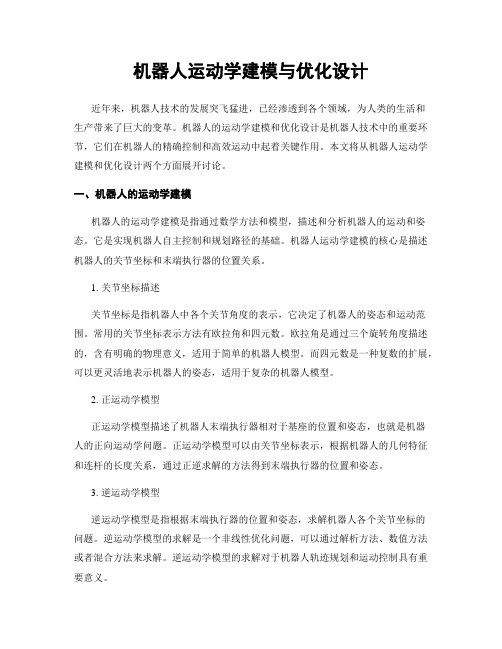
1.1 坐 标 系 构 建 (Establishing coordinate systems) a
注:负号“—”表示与矢量轴正方向相反,即与图示所画坐 标系的正方向相反
表 1 中的参数同样也可以依据上节 “连 杆坐标系之间的变换矩阵” 这一节所介绍的 方法获得,从上表可以看出,前三个连杆间 距(d1、d2、d3)为 0mm,d4 为常量,并 且各连杆间没有伸缩运动,杆长 l
2
0.5 0.2588 77.9423 0.866 0.483 0.8365 0.258841 0.9659 143.5802 0 0 1 0
表 1 六足机器人的连杆及关节参数 Table 1 The connecting rod and joint parameters of a six-legged robot
连杆 i 1 2 3 4 转角 θi/度 θ1 θ2 θ3(+90) θ4 连杆间距 di/mm 0 0 0 -d4 杆长 li/mm 0 l2 0 l4 扭角 αi/度 90 0 -90 -90
采用数学计算软件分析正解结果, 可得 到此运动学模型正解简图。 为分析此运动学 正解的正确性, 下面将分别以不同初始值进 行变量输入, 从而不断验证此运动学模型和 正解结果。 下面对各转角变量进行随机输入, 输入 如下:
θ1、θ2、θ3、θ4 分别为 90 度,30
度,45 度,60 度,此时末端的位姿为:
国家自然科学基金资助项目(61075097) ; 天津职业技术师范大学校内基金 (KYQD13012)
构较为复杂,国内外学者分别利用几何构 图、坐标变换、 变量耦合[1~4]等多种方法对 仿生机器人运动学模型的解析解与数值解 进行了求解。 但目前仍然缺乏对多足仿生机 器人整体机构的运动学模型构建与求解。 本文基于多足移动机器人整体机构坐 标系构建, 提出一种新型多运动模式轮腿移 动机器人,具有六条仿生轮腿,可通过变换 关节构型,实现多种运动模式之间的转换, 例如昆虫运动模式和哺乳动物运动模式之 间的转换,因此其整体机构具有变形功能; 本文将对其串并混联机构运动学模型的构 建方法、求解方法进行研究。
RESEARCH ON KINEMATIC FOR THE MECHANISM OF WHEEL-LEG MOBILE ROBOT WITH MULTI-SPORTS MODE
SONG Mengjun Wang Xulong Zhou Haisong Zhou Yi
(1 School of Automobile and Transportation, Tianjin University of Technology and Education,Tianjin ,300222,China )
b
c
图 2 六足机器人机械腿的运动学模型 Fig.2 Six-legged robot kinematic model of the mechanical leg
图 1 多运动模式轮腿移动机器人机构模型 Fig.1. Mechanism model of the multi-motion mode bionic robot
基节 股节
胫节
轮
变形关节
的结构,然后获取 D-H 参数表[5]。 D-H 参数由 l、 d、 α、 θ四个分量组成, 分别描述了机器人某一杆件相对于前一个 杆件的位姿(位置和方向) ,不同的机器人, 采用不同的方法为机器人杆件设置坐标系, 将导致一个不同的 D-H 参数定义和参数指 标。 本文将机器人的基础坐标系建立在了关 节一处(如图 2.6 所示) 。 六足机器人的机械腿的运动学模型如 图 2 所示, 转角(变量)为θ1、θ2、θ3、 θ4,连杆长度参数为 l1、l2、l3 、l4 ,连杆 距离 d1、d2、d3、d4,连杆扭角α1、α2、α 3、α4。此模型建立的情况为当腿部伸直轮 子垂直向下,而末端(Z4)位于轮子正对面 时的情况,如图 2:
图 3 六足机器人机械腿坐标系的建立 Fig.3 Establishment of six-legged robot mechanical leg coordinate system 2
宋孟军 王旭龙
周海松等:多运动模式轮腿移动机器人机构运动学研究
依据 D-H 法则,建立如图 3 所示坐标 系, 各连杆的参数和关节变量如下表 1 所示:
图 5 四角度输入时的三维实体模型及轨迹仿 真 Fig. 5 Trajectory simulation on four angles input of the three-dimensional solid model 图 4 四角度输入时的三维数学模型及轨迹仿 真 Fig.4 Three-dimensional mathematical model and trajectory simulation of the four angles input