01单级移动倒立摆建模及串联超前校正设计
单级移动倒立摆建模及串联PID校正..
课程设计题目单级移动倒立摆建模及串联PID校正学院自动化学院班级电气1003班姓名xxx指导教师刘志立2013 年 1 月16 日课程设计任务书学生姓名: xxx 专业班级: 电气1003班指导教师: 刘志立 工作单位: 自动化学院题 目: 单级移动倒立摆建模及串联PID 校正 初始条件:要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、研究该装置的非线性数学模型,并提出合理的线性化方法,建立该装置的线性数学模型-传递函数(以u 为输入,θ为输出);2、要求系统输出动态性能满足,5.1%,3.4%s t s ≤≤σ试设计串联PID校正装置。
3、 用Matlab 对校正后的系统进行仿真分析,比较校正装置加在线性化前的模型上和线性化后的模型上的时域响应有何区别,并说明原因。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日目录摘要 (1)1单级移动倒立摆系统的建模 (2)1.1倒立摆系统建模 (2)1.2单级移动倒立摆的数学模型的线性化 (3)2绘制校正前系统的Bode图和Nyquist图 (4)2.1绘制Bode图 (4)2.绘制Nyquist图 (5)3单级移动倒立摆系统的串联PID校正 (6)3.1设计PID控制器装置 (6)2.2确定PID参数 (7)4用MATLAB对校正后的系统进行校正分析 (9)4.1绘制校正后系统的bode图 (9)4.2绘制校正后系统的Nyquist图 (10)4.3系统校正后的比较 (11)5心得体会.............................................. . (12)参考文献 (13)本科生课程设计成绩评定表 (14)摘要倒立摆系统是一个典型的非线性多变量强耦合不稳定的非最小相位系统,在航天航空和机电一体化等领域得到了广泛的应用,如在火箭箭身的姿态稳定控制及机器人多自由运动稳定的设计都用到了倒立摆系统。
自控课设
学号:课程设计单级移动倒立摆建模及串联超前题目校正学院自动化学院专业自动化专业班级自动化0904班姓名小白牙指导教师2012年1月4日课程设计任务书学生姓名: 小白牙 专业班级: 自动化0904班 指导教师: 工作单位: 武汉理工大学题 目: 单级移动倒立摆建模及串连超前校正 初始条件:要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 研究该装置的非线性数学模型,并提出合理的线性化方法,建立该装置的线性数学模型-传递函数(以u 为输入,θ为输出);2、要求系统输出动态性能满足,1%,3.4%s t s ≤≤σ试设计串连超前校正装置。
3、用Matlab 对校正后的系统进行仿真分析,比较校正装置加在线性化前的模型上和线性化后的模型上的时域相应有何区别,并说明原因。
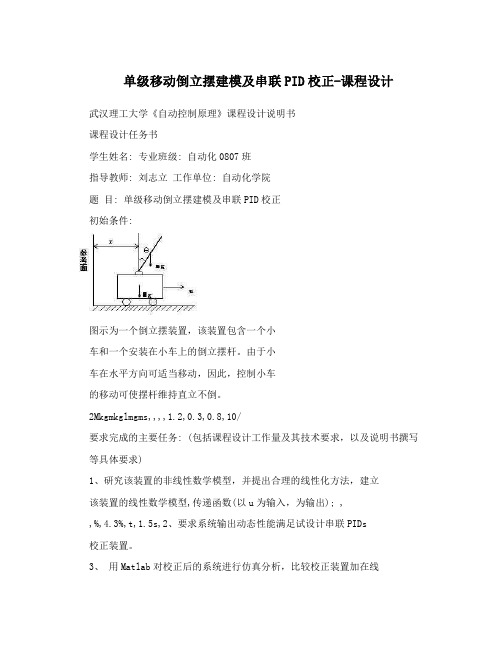
时间安排:图示为一个倒立摆装置,该装置包含一个小车和一个安装在小车上的倒立摆杆。
由于小车在水平方向可适当移动,因此,控指导教师签名:年月日系主任(或责任教师)签名:年月日目录摘要倒立摆系统作为控制理论研究中一种比较理想的实验手段,以自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论的或方法的典型方案,促进了控制系统新理论的、新思想的发展。
由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用和开发前景。
平面倒立摆可以比较真实的模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。
AbstractInverted pendulum system in control theory as an idealexperimental tool to automatically control the teaching of theory, experiment and research to build a good experimental platform used to test a theory or method of control typical of programs to promote the new theory of control systems, the development of new of the extensive application of control theory, which produces systematic study of methods and techniques will be precision instruments in the semiconductor processing, robot control, artificial intelligence, missile defense control systems, air docking technology, rocket launchers in the vertical control, satellite flight the attitude control and general industrial applications has extensive use and development prospects. Planar inverted pendulum can be more realistic simulation of the rocket's flight control and stability control walking robotic research.单级移动倒立摆及串联超前校正1.单级移动倒立摆系统建模非线性化数学模型单级移动倒立摆实验建模是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对象并通过传感器检测其可观测的输出,利用数学手段建立系统的输入-输出关系。
一级倒立摆的建模及控制分析
直线一级倒立摆的建模及控制分析摘要:本文利用牛顿—欧拉方法,建立了直线型一级倒立摆系统的数学模型。
在分析的基础上, 采用状态反馈控制中极点配置法设计了用于直线型一级倒立摆系统的控制器。
此外,用MATLAB 仿真绘制了相应的曲线并做了分析。
一、问题描述倒立摆控制系统是机器人技术、控制理论、计算机控制等多个领域和多种技术的有机结合,其被控系统本身是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,是控制理论研究中较为理想的实验对象。
它为控制理论的教学、实验和科研构建了一个良好的实验平台,促进了控制系统新理论、新思想的发展。
倒立摆系统可以采用多种理论和方法来实现其稳定控制,如PID,自适应、状态反馈、智能控制等方法都己经在倒立摆控制系统上得到实现。
由于直线一级倒立摆的力学模型较简单,又是研究其他倒立摆的基础,所以本文利用所学的矩阵论知识对此倒立摆进行建模和控制分析。
二、方法简述本文利用牛顿—欧拉方法,建立了直线型一级倒立摆系统的数学模型。
在分析的基础上, 采用状态反馈控制中极点配置法设计了用于直线型一级倒立摆系统的控制器。
此外,用MATLAB 仿真绘制了相应的曲线并做了分析。
三、模型的建立及分析3.1 微分方程的推导在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图1所示。
图1 直线一级倒立摆系统假设 M 为小车质量;m 为摆杆质量;b 为小车摩擦系数;l 为摆杆转动轴心到杆质心的长度;I 为摆杆惯量;F 为加在小车上的力;x 为小车位置;φ为摆杆与垂直向上方向的夹角;θ为摆杆与垂直向下方向的夹角。
图2是系统中小车和摆杆的受力分析图。
其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。
值得注意的是: 在实际倒立摆系统中检测和执行装置的正负方向已确定, 因而矢量方向定义如图2所示, 图示方向为矢量正向。
(a) (b)图2 小车和摆杆的受力分析图分析小车水平方向所受的合力,可以得到以下方程:N x b F x M --= (1)由摆杆水平方向的受力进行分析可以得到下面等式:θθθθs i n c o s 2ml ml x m N -+= (2) 把这个等式代入上式中,就得到系统的第一个运动方程:()F ml ml x b x m M =-+++θθθθsin cos 2 (3)为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:θθθθc o s s i n 2 ml ml mg P --=- (4) 力矩平衡方程如下:θθθI Nl Pl =--cos sin (5)合并这(4)、(5)两个方程,约去P 和N ,得到第二个运动方程:()θθθc o s s i n 2x ml mgl ml I -=++ (6) 假设φ与1(单位是弧度)相比很小,即φ《1,则可以进行近似处理:0d d s i n 1c o s 2=⎪⎭⎫ ⎝⎛-=-=t θφθθ,, (7) 用u 来代表被控对象的输入力F ,线性化后两个运动方程如下:()()⎩⎨⎧=-++=-+u ml x b x m M xml mgl ml I φφφ 2 (8) 3.2 状态空间方程方程组(8)对φ,x 解代数方程,整理后的系统状态空间方程为: ()()()()()()()()u Mm l m M I m l Mm l m M I m lI x x Mm l m M I m M m gl Mm l m M I m lbMm l m M I gl m Mm l m M I b m l I x x ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡++++++⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+++++-+++++-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡222222222200001000000010φφφφ u x x x y ⎥⎦⎤⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=0001000001φφφ 对于质量均匀分布的摆杆有:3/2ml I =,于是可得:()x ml mgl ml ml =-+φφ223/ 化简得:xll g 4343+=φφ设}{x u x x X ==1,,,,φφ ,则有:14301004300100000000010u l x x l g x x⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡φφφφ10001000001u x x x y ⎥⎦⎤⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=φφφ 3.3 实际系统模型实际系统模型参数: M =1.096 Kg ;m =0.109 Kg ;b =0.1 N/m/s ; l =0.25 m ;I =0.0034 kg ·m ·m ;采样频率 T =0.005 s 。
单级移动倒立摆建模及串联超前校正设计(打印版)汇编

目录摘要 (2)1单级移动倒立摆的Newton方法建模 (3)1.1非线性数学模型 (3)1.1.1 被控对象系统建模分析 (3)2倒立摆系统的串联超前校正装置校正分析 (5)2.1未校正系统输出动态性能 (5)2.2系统的串联超前装置校正 (8)2.2.1参数修正 (8)2.2.2串联超前校正装置 (11)2.3校正后系统的稳定性分析 (11)3校正前系统与校正后系统的比较 (14)4设计心得体会 (14)参考文献 (15)摘要倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
本次课程设计主要考察对课堂理论知识把握的牢固程度和将理论知识、数学建模及软件应用相综合应用的技巧。
通过对给定的物理模型进行分析和求解,进而使用自动控制中所要求的知识,串联超前校正装置,使系统响应符合题目给定的要求。
这次课程设计要求的绘图软件为MATLAB,使用的校正方式为串联超前校正。
关键字:倒立摆串联超前校正MATLAB单级移动倒立摆建模及串联超前校正设计1单级移动倒立摆的Newton方法建模1.1非线性数学模型系统建模可以分为两种:机理建模和实验建模。
实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对象并通过传感器检测其可观测的输出,应用数学手段建立起系统的输入-输出关系。
这里面包括输入信号的设计选取,输出信号的精确检测,数学算法的研究等等内容。
机理建模就是在了解研究对象的运动规律基础上,通过物理、化学的知识和数学手段建立起系统内部的输入-状态关系。
单级倒立摆系统建模(单页)

单级倒立摆系统建模倒立摆倒立摆(Inverted Pendulum)作为一个被控对象,是快速、多变量、开环不稳定、非线性的高阶系统,必须施加强有力的控制手段才能使之稳定。
许多新的实时控制理论,都通过倒立摆控制试验来加以验证。
从工程背景来讲,小到日常生活中所见到的各种重心在上、支点在下的物体的稳定问题,大到火箭的垂直发射控制等关键技术问题,都与倒立摆控制有很大的相似性。
小车倒立摆系统建模图1所示的是人手保持倒立摆平衡的问题,相应的平衡条件是和。
人手保持倒立摆平衡与导弹在发射初始阶段的状态控制没有本质差异。
0)(=t θ0d /d =tθ图1 手持倒立摆小车倒立摆动力学分析(3)单级旋转倒立摆系统结构单级旋转倒立摆系统结构表1 旋转式倒立摆系统符号意义及参数值符号意义数值与单位M驱动臂的总质量 0.285kg 1M摆杆的总质量 0.175kg 2G转动力矩与控制电压之比 0.0508Nm/V 0U控制输入电压VJ驱动臂对其质心处的转动惯量 0.00185kgm²1J摆杆对其质心处的转动惯量 0.00137kg m²2L驱动臂的质心到转轴的距离0.119m1L摆杆的质心到转轴的距离 0.24m2表1 旋转式倒立摆系统符号意义及参数值符号意义数值与单位L从关节到转轴的距离0.127m12F转轴处的摩擦阻力矩系数0.05Nms1F关节处的摩擦阻力矩系数 0.0026 Nms 2f驱动臂与摆杆作用力的水平分力N1xf驱动臂与摆杆作用力的垂直分力N1yθ驱动臂相对垂直线的角位移rad1θ摆杆相对垂直线的角位移rad2g重力加速度9.8m/s²。
单级倒立摆的数学建模与仿真
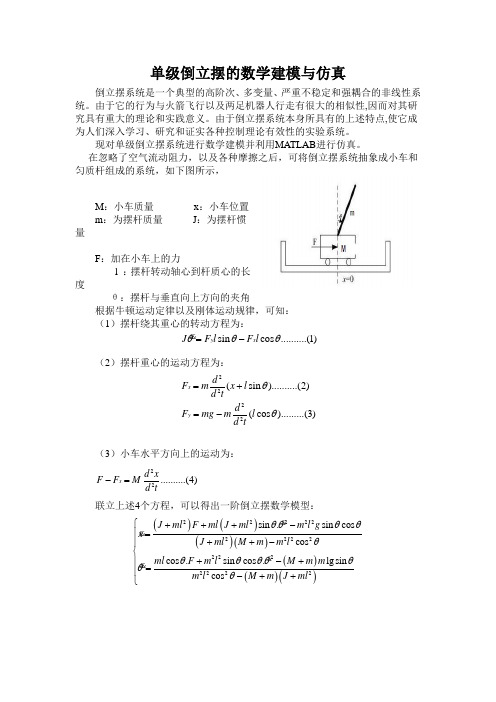
单级倒立摆的数学建模与仿真倒立摆系统是一个典型的高阶次、多变量、严重不稳定和强耦合的非线性系统。
由于它的行为与火箭飞行以及两足机器人行走有很大的相似性,因而对其研究具有重大的理论和实践意义。
由于倒立摆系统本身所具有的上述特点,使它成为人们深入学习、研究和证实各种控制理论有效性的实验系统。
现对单级倒立摆系统进行数学建模并利用MATLAB 进行仿真。
在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,M :小车质量 x :小车位置m :为摆杆质量 J :为摆杆惯量F :加在小车上的力l :摆杆转动轴心到杆质心的长度θ:摆杆与垂直向上方向的夹角根据牛顿运动定律以及刚体运动规律,可知:(1)摆杆绕其重心的转动方程为:(2)摆杆重心的运动方程为:(3)小车水平方向上的运动为:22..........(4)x d xF F M d t -=联立上述4个方程,可以得出一阶倒立摆数学模型:()()()()()()()2222222222222222sin .sin cos cos cos .sin cos .lg sin cos J m l F m l J m l m l g x J m l M m m l m l F m l M m m m l M m J m l θθθθθθθθθθθθ⎧+++-⎪=++-⎪⎨+-+⎪=⎪-++⎩sin cos ..........(1)y x J F l F l θθθ=- 2222(sin )..........(2)(cos ).........(3)x y d F m x l d t d F m g m l d t θθ=+=-式中J 为摆杆的转动惯量:32ml J =若只考虑θ在其工作点附近θ0=0附近(︒︒≤≤-1010θ)的细微变化,则可以近似认为:⎪⎩⎪⎨⎧≈≈≈1cos sin 02θθθθ ⎪⎪⎩⎪⎪⎨⎧++-+=++-+=2..2222..)(lg )()()(Mml m M J mlF m m M Mml m M J g l m F ml J x θθθ 若取小车质量M=2kg,摆杆质量m=1kg,摆杆长度2 l =1m,重力加速度取g=2/10s m ,则可以得一阶倒立摆简化模型:....0.44 3.330.412x F F θθθ⎧=-⎪⎨⎪=-+⎩由以上得出的一阶倒立摆模型,对一阶倒立摆进行仿真,222()0.4()12() 1.110()s F s s x s s s s θθ-⎧=⎪-⎪⎨-+⎪=⎪⎩。
单级倒立摆稳定控制

课程设计任务书班1005自动化 专业班级: 王建华 学生姓名:自动化学院 工作单位: 陈跃鹏 指导教师:题 目: 单级移动倒立摆建模及串连超前校正初始条件:要求完成的主要任务: 〔包括课程设计工作量及其技术要求,以及说明书撰写等具体要求〕1、研究该装置的非线性数学模型,并提出合理的线性化方法,建立该装置的线性数学模型-传递函数〔以u 为输入,为输出〕;2、要求系统输出动态性能满足试设计串连超前校正装置。
3、 用Matlab 对校正后的系统进展仿真分析,比拟校正装置加在线性化前的模型上和线性化后的模型上的时域相应有何区别,并说明原因。
时间安排:任务 时间〔天〕审题、查阅相关资料2 分析、计算 2 编写程序 2 撰写报告 1 论文辩论指导教师签名: 年 月 日图示为一个倒立摆装置,该装置包含一个小车和一个安装在小车上的倒立摆杆。
由于小车在水平方向可适当移动,因此,控制小车的移动可使摆杆维持直立不倒。
系主任〔或责任教师〕签名:年月日目录摘要 (1)1. 一级倒立摆数学模型建立 (2)1.1 一级倒立摆的组成 (2)1.2 应用牛顿力学建立系统数学模型 (2)1.3 数学模型的线性化 (4)2. 校正前系统动态性能分析 (4)2.1 待校正系统阶跃响应曲线 (4)2.2 待校正系统根轨迹分析 (5)3. 串联超前校正设计分析 (6)3.1 系统校正前性能指标要求分析 (6)3.2 校正环节设计分析 (7)3.3 校正后系统动态性能分析 (8)3.4 系统参数的修正 (9)4. SIMULINK仿真设计 (11)4.1 MATLAB及SIMULINK (11)4.2 绘制系统仿真构造图并进展S IMULINK仿真 (11)5. 系统校正前后动态性能比拟 (13)5.1 待校正系统的阶跃响应曲线、根轨迹图、B ODE图和N YQUIST图 (13)5.2 校正以后系统的阶跃响应曲线、根轨迹图、B ODE图和N YQUIST图 (13)6. 小结 (14)7. 心得体会 (15)8. 附录倒立摆在MATLAB中自带的倒立摆模型 (16)参考文献 (18)摘要在控制理论开展的过程中,某一理论的正确性及在实际中的可行性需要一个按其理论设计的控制器去控制一个典型对象来验证,倒立摆就是这样一个对象。
单级移动倒立摆建模及串联PID校正-课程设计
单级移动倒立摆建模及串联PID校正-课程设计武汉理工大学《自动控制原理》课程设计说明书课程设计任务书学生姓名: 专业班级: 自动化0807班指导教师: 刘志立工作单位: 自动化学院题目: 单级移动倒立摆建模及串联PID校正初始条件:图示为一个倒立摆装置,该装置包含一个小车和一个安装在小车上的倒立摆杆。
由于小车在水平方向可适当移动,因此,控制小车的移动可使摆杆维持直立不倒。
2Mkgmkglmgms,,,,1.2,0.3,0.8,10/要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、研究该装置的非线性数学模型,并提出合理的线性化方法,建立该装置的线性数学模型,传递函数(以u为输入,为输出); ,,%,4.3%,t,1.5s,2、要求系统输出动态性能满足试设计串联PIDs校正装置。
3、用Matlab对校正后的系统进行仿真分析,比较校正装置加在线性化前的模型上和线性化后的模型上的时域响应有何区别,并说明原因。
时间安排:任务时间(天)审题、查阅相关资料 2分析、计算 3编写程序 2撰写报告 2论文答辩 1指导教师签名: 年月日系主任(或责任教师)签名: 年月日武汉理工大学《自动控制原理》课程设计说明书目录摘要 ...............................................................1 1 单级移动倒立摆系统建模 (2)1.1 倒立摆系统建模 (2)1.2 求倒立摆系统的传递函数 (4)2 绘制校正前系统的Bode图和Nyquist图 (4)2.1 绘制Bode图 (4)2.2 绘制Nyquist图 (6)3 PID控制器设计 (7)3.1 设计PID控制器装置 (7)4 用MATLAB对校正后的系统进行仿真分析 (10)4.1 绘制校正后的系统Bode图 (10)4.2 绘制校正后系统的Nyquist图 (11)4.3 系统校正前后的比较 (11)5 结束语 (12)参考文献 (12)本科生课程设计成绩评定表 (13)武汉理工大学《自动控制原理》课程设计说明书摘要倒立摆系统是一个典型的非线性多变量强耦合不稳定的非最小相位系统,在航天航空和机电一体化等领域得到了广泛的应用,如在火箭箭身的姿态稳定控制及机器人多自由运动稳定的设计都用到了倒立摆系统。
单级移动倒立摆系统建模及性能分析
自动控制原理课程设计题目单级移动倒立摆系统建模及性能分析学生姓名学号学院专业指导教师二O一O年 5 月15日南京信息工程大学本科生课程设计任务书注:此表由指导教师课程设计工作开始前填写,每位学生两份,一份发给学生,一份交学院留存。
南京信息工程大学本科生学年论文(课程设计)指导教师评阅意见表目录1 系统介绍2 单级倒立摆的数学模型3 系统稳定性分析4 分析相角裕度和截止频率5 系统动态性能分析6 系统仿真7 总结与体会参考文献摘要倒立摆系统是一个典型的非线性、强耦合、多变量和不稳定系统,作为控制系统的被控对象,通过以单级倒立摆为被控对象,来掌握控制系统的数学模型的建立方法和及控制系统的调试方法,掌握MATLAB仿真软件的使用方法。
本次课程设计包含如下几个内容:[1]研究该装置的非线性数学模型,并提出合理的线性化方法,建立该装置的线性数学模型-传递函数(以u为输入, 为输出);[2]用画根轨迹方法对系统进行稳定性分析,用BODE图求出系统的相角裕度和截止频率.[3]用Matlab求系统阶跃响应.1系统介绍单级倒立摆系统的结构示意图如图1所示。
图1 单级倒立摆系统示意图图示为一个倒立摆装置,该装置包含一个小车和一个安装在小车上的倒立摆杆。
由于小车在水平方向可适当移动,因此,控制小车的移动可使摆杆维持直立不倒。
2M kg m kg l m g m s====1,0.2,0.5,10/系统组成的框图如图2所示。
施加外力运动状态摆角θ图2 单级倒立摆系统组成框图系统通过给小车施加外力,使摆杆与小车相互作用,达到平衡,维持不倒。
2 单级倒立摆的数学模型对系统建立数学模型是系统分析、设计的前提,为了简化分析,忽略空气阻力,仅考虑小车与倒立摆之间的摩擦力。
将倒立摆系统看成简单的小车与单级摆组成的系统。
在水平方向施加控制力u,相对参考坐标系产生位移x 。
建立系统的线性数学模型-传递函数(以u为输入,θ为输出)。
设小车瞬时位置为 ,摆心瞬时位置为在水平方向,由牛顿第二定律 即:在垂直方向:惯性力矩与重力矩平衡即:2sin 0,cos 1,θθθθθ≈≈很小时,忽略项 则有:联立求解并进行拉氏变换:则传递函数为3 系统稳定性分析代入参数,M =1kg,m =0.5kg,l =0.5m,用如下程序将传递函数在MATLAB 中表示出来: num=[-1]den=[0.5,0,-7.5] sys=tf(num,den)用MATLAB 显示为:x(sin )x l θ+2222(sin )d x d M m x l u dt dtθ++=2()cos sin M m x ml ml uθθθθ++-=22(sin )cos sin d m x l l mgl dt θθθ⎡⎤+=⎢⎥⎣⎦22cos cos sin cos sin x l l g θθθθθθθ+-=)M m x ml u θ++=(x l g θθ+= 2)(1)()(Mls g M m s u s -+=θ用如下程序将传递函数的根轨迹图在MATLAB中表示出来:num=[-1]den=[0.5,0,-7.5]rlocus(num,den)用MATLAB做出的根轨迹如图3所示:图3 校正前系统根轨迹由于系统在右半平面有极点,因此为非稳定系统.4 分析相角裕度和截止频率利用下列程序MATLAB中画出BODE图,并算出相角裕度和截止频率: num=[-1]den=[0.5,0,-7.5]sys=tf(num,den)[mag,phase,w]=bode(num,den)[gm,pm,wcg,wcp]=margin(mag,phase,w)margin(sys)用MATLAB做出BODE图如图4所示:图4 校正前系统BODE图gm = Inf ,pm = Inf, wcg = NaN ,wcp = NaN其中gm为幅值裕度, pm为相角裕度,wcg为相角交界频率,wcp为截止频率.所画的BODE图没有穿过频率轴,使的没有截止频率和相角裕度.4系统阶跃响应因为求单位阶跃响应要求在闭环条件下,求出闭环传递函数为:利用如下程序在MATLAB中对系统绘制单位阶跃响应:num=[2]den=[-1,0,17]step(num,den)系统单位阶跃响应如图5所示:图5 系统单位阶跃响应因为系统为不稳定系统,所以当它时间趋于无穷时,它的幅值并不趋于输入信号,即不会趋近于1.、5系统动态性能分析(用公式计算各动态指标,根据系统的阶次)5.1延迟时间的计算5.2 上升时间的计算5.3峰值时间的计算5.4 超调量的计算5.5 调节时间的计算5.6 使用MATLAB求系统各动态性能指标num=[0,0,2.7]; %设置分子的系数den=conv([1, 0.8, 0.64],[a, 1]); %设置分母的系数G=tf(num,den);t=0:0.01:30; % 从0到30每隔0.01取一个值c=step(G, t); % 动态响应的幅值赋给变量Cplot(t,c) %绘制二维图形,横坐标取t,纵坐标取c grid % 绘制网格线[y,x,t]=step(num,den,t); %求系统单位阶跃响应maxy=max(y) % 求取响应的最大值ys=y(length(t)) %求取响应的终值pos=(maxy-ys)/ys %求取超调量n=1;while y(n)<0.5*ysn=n+1;endtd=t(n) %求取延迟时间n=1;while y(n)<ysn=n+1;endtr=t(n) %求取上升时间n=1;while y(n)<maxyn=n+1;endtp=t(n) %求取峰值时间L=length(t);while (y(L)>0.95*ys)&(y(L)<1.05*ys)L=L-1;endts=t(L) %求取调节时间title('Unit-Step Response of G(s)朱雷(1)') %设置Matlab 图的标题6系统仿真在MATLAB命令窗口中输入SIMULINK,然后点File→New→Model,在SOURCE 中选择STEP模块,在SINKS中选择SCOP模块,在CONTINUOUS中选择传递函数,双击更改极点和零点,用直线将模块连接后,点击START,双击示波器,即可看到仿真图形.系统MATLAB仿真图形如图6所示;图6 系统MATLAB仿真图形7总结与体会参考文献[1]自动控制原理,胡寿松,科学出版社,2007-7[2] 自动控制原理的MA TLAB实现,黄忠霖,国防工业出版社,2007-2[3] 自动控制原理与设计,美)富兰克林(Franklin G.F.),(美)鲍威尔(Powell J.D.),(美)那诶尼(Naeini A.E.)著,李中华,张雨浓译,人民邮电出版社,2007-11-1[4][5]。
单级倒立摆系统课程设计

单级倒立摆系统课程设计一、课程目标知识目标:1. 理解单级倒立摆系统的基本原理,掌握其数学模型和动力学特性;2. 学会分析单级倒立摆系统的稳定性,并掌握相应的控制策略;3. 掌握利用传感器和执行器实现单级倒立摆系统的实时控制方法。
技能目标:1. 能够运用所学的理论知识,设计并搭建单级倒立摆实验系统;2. 能够编写程序,实现对单级倒立摆系统的实时控制,使系统保持稳定;3. 能够分析实验数据,优化控制参数,提高系统性能。
情感态度价值观目标:1. 培养学生对物理系统控制原理的兴趣,激发学生探索科学技术的热情;2. 培养学生的团队协作意识和解决问题的能力,增强学生的自信心;3. 引导学生关注科技创新,认识到所学知识在实际应用中的价值。
课程性质:本课程为理论与实践相结合的课程,旨在帮助学生将所学的理论知识应用于实际系统中,提高学生的实践能力和创新能力。
学生特点:学生具备一定的物理、数学基础,对控制原理有一定了解,但实践经验不足。
教学要求:注重理论与实践相结合,鼓励学生动手实践,培养解决实际问题的能力。
在教学过程中,注重引导学生自主学习,培养学生的创新意识和团队协作精神。
通过本课程的学习,使学生能够将所学知识应用于实际系统,提高自身综合素质。
二、教学内容1. 理论知识:- 单级倒立摆系统的基本原理及数学模型;- 单级倒立摆系统的稳定性分析;- 控制策略及控制算法在单级倒立摆系统中的应用;- 传感器和执行器在单级倒立摆系统中的作用及选型。
2. 实践操作:- 搭建单级倒立摆实验系统;- 编写程序实现实时控制;- 调试优化控制参数;- 分析实验数据,提高系统性能。
3. 教学大纲:- 第一周:介绍单级倒立摆系统基本原理,学习数学模型,进行稳定性分析;- 第二周:学习控制策略及控制算法,探讨其在单级倒立摆系统中的应用;- 第三周:了解传感器和执行器,学习其在单级倒立摆系统中的作用及选型;- 第四周:分组搭建单级倒立摆实验系统,进行程序编写和实时控制;- 第五周:调试优化控制参数,分析实验数据,提高系统性能。
单级倒立摆的数学模型的建立-参考

1单级倒立摆的数学模型的建立:小车由电机通过同步带驱动在滑杆上来回运动,保持摆杆平衡。
电机编码器和角编码器向运动卡反馈小车和摆杆位置(线位移和角位移)。
导轨截面成H 型,小车在轨道上可以自由滑动,其在轨道上的有效运行长度为1米。
轨道两端装有电气限位开关,以防止因意外失控而撞坏机构。
图1 单级倒立摆系统数学模型倒立摆系统的模型参数如下[]:M 小车质量 1.096Kg ; m 摆杆质量 0.109Kgb 小车摩擦系数 0.1N/m /sec I 摆杆质量 0.0034kg*m*ml 摆杆转动轴心到杆质心的长度 0.25mT 采样频率 0.005s下面N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。
分析小车水平方向所受的合力,可得到方程为:N x b F xM --= (1) 由摆杆水平方向的受力进行分析可以得到下面等式:()θθθθθsin cos sin 222ml ml xm N l x dtd m N -+=+= (2) 把这个等式代入(1)式中,得到系统的第一个运动方程:()F ml ml x b xm M =-+++θθθθsin cos 2 (3) 为了推出系统的第二个运动方程,对摆杆垂直方向的合力进行分析,得到下面的方程:()θcos 22l dtd m mg P =-θθθθcos sin 2 ml ml mg P --=- (4) 力矩平衡方程如下:θθ I Nl Pl =--cos sin (5) 方程中力矩的方向,由于φπθ+=,θφθφsin sin ,cos cos -=-=,故等式前面有负号。
合并这两个方程,约去P 和N ,得到第二个运动方程:()θθθcos sin 2x ml mgl ml I -=++ (6)综上:单级倒立摆的运动方程为:()F ml ml x b xm M =-+++θθθθsin cos 2 (3) ()θθθcos sin 2x ml mgl ml I -=++ (6)由于这2个方程式非线性的近似线性化处理:考虑一类非线性系统其镇定问题所研究的是设计一个状态反馈控制器,使得闭环系统为稳定系统。
单级倒立摆建模与pd矫正
摘要
单级移动倒立摆控制系统是一个复杂的、 不稳定的、 非线性系统, 是进行控制理论教学 及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中的许多典 型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆 的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。本此课 程设计对单级移动倒立摆的平衡问题进行了研究并采用串联 PD 校正实现了系统的的平衡 控制。建立了系统的数学模型进行合理线性化,求出线性传递函数。并且设计串联 PD 校正 装置, 使系统输出动态性能满足一定指标要求。使用 Matlab 软件中的 SIMULINK 工具对倒 立摆系统的运动进行了计算机仿真,并利用 Matlab 便捷的计算功能和绘图功能分析未校正 系统的动态性能和校正后系统的各项性能。 关键字:单级移动倒立摆 串联 PD 校正 MATLAB 仿真
2 单级移动倒立摆的串联 PD 校正 ............................................................................... 4
2.1 未校正系统的动态性能指标.................................................................................... 4 2.2 系统的串联 PD 校正 ................................................................................................ 9 2.3 校正后系统动态性能指标 ..................................................................................... 11
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计任务书
学生姓名: 专业班级: 指导教师: 工作单位:
题 目: 单级移动倒立摆建模及串联超前校正设计 初始条件:
要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)
(1) 研究该装置的非线性数学模型,并提出合理的线性化方法,建立该装置的线
性 数学模型-传递函数(以u 为输入,θ为输出);
(2) 要求系统输出动态性能满足,5.1%,3.16%s t s ≤≤σ试设计串联超前校正装置。
(3) 用Matlab 对校正后的系统进行仿真分析,比较校正装置加在线性化前的模型
上和线性化后的模型上的时域响应有何区别,并说明原因。
(4) 对上述任务写出完整的课程设计说明书,说明书中必须进行原理分析,写清
楚分析计算的过程及其比较分析的结果,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。
时间安排:
指导教师签名:年月日系主任(或责任教师)签名:年月日
武汉理工大学《╳╳╳╳╳╳》课程设计说明书
附件5:课程设计说明书统一书写格式
设计题目
正文题序层次是文章结构的框架。
章条序码统一用阿拉伯数字表示,题序层次可以分为若干级,各级号码之间加一小圆点,末尾一级码的后面不加小圆点,层次分级一般不超过4级为宜,示例如下:
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳╳
3。