XL80 激光干涉仪详细样本
雷尼绍XL80激光干涉仪操作手册

镭射干涉仪操作手册手册内容一.RENISHAW 公司简介 1二.镭射干涉仪原理 2(1)波的速度 3(2)干涉量测原理 3(3)镭射干涉仪 4(4)镭射干涉仪一般量测项目 4三.注意事项 5四.镭射干涉仪防止误差及保养 5(1)镭射干涉仪防止误差 5(2)镭射干涉仪保养方法 6五.安全及注意事项 6六.镭射光原理及特性7七.镭射硬件介绍8八.镭射架设流程图15九.定位量测原理及操作16(1)线性定位量测原理16(2)量测方式17十.镭射易发生之人为架设误差20(1)死径误差20(2)余弦误差21(3)阿倍平移误差21 十一.镭射操作之步骤22(1)软件安装之步骤22(2)执行量测软件22(3)定位量测硬件架设之操作23(4)镜组架设前之注意事项24(5)镜组架设之步骤24 十二.定位量测之程序范例29 十三.定位量测之软件操作步骤30 热漂移量测38 快速功能键44 十四.动态软件量测之操作45(1)动态量测硬件之架设45(2)执行量测之软件46(3)位移与时间48(4)速度与时间49(5)加速度与时间50 十五.角度量设之操作52(1)注意事项52(2)镜组架设的种类53(3)镜组架测之步骤54(4)角度量测之软件操作步骤57 十六.RX10旋转轴之量测62(1)说明62(2)硬件配件之介绍62(3)硬件操作之步骤64(4)软件操作之步骤67 十七.直度量测之操作75(1)直度之分类75(2)直度量测之硬件架设75(3)镜组架设之步骤75(4)直度软件之操作步骤80 十八.Z轴直度镜组织架设方法85 十九.垂直度量测之操作89(1)垂直度镜组架设之步骤89(2)软件操作之步骤95 二十.平面度量测之原理与操作101(1)硬设备101(2)操作之原理102(3)镜组架设之步骤102(4)软件操作之步骤110RENISHAW 公司简介RENISHAW为一家英国公司,产品营销全世界,主要产品有三次元量床之测头、测针、BALLBAR循圆测试仪、镭射干涉仪・・・・・・・・等等及产品经NPL(英国国家标准)认证为ISO 9001之合格厂商RENISHAW公司为机器设备制造商提供量测检验系统的仪器,提供各种用于机器精度检定的量测设备进而改善机器的精度RENISHAW XL80 高性能镭射干涉仪是机床、三次元坐标量床及其它定位装置精度校准用的高性能仪器,由于最新电子技术的应用,使其镭射波长非常稳定并保持了低成本高效率的工作流程RENISHAW 产品介绍:镭射干涉仪量测系统循圆测试仪器(BALLBAR)量测系统三次元测头测针系列黏贴式光学尺系列镭射干涉仪量测原理MICHELSON E0 干涉原理两个频率振幅波长相同的镭射光波因相位变化而发生不同程度的干涉a.相长干涉(建设性干涉)b.相消干涉(破坏性干涉)相长干涉相消干涉1.波的速度V=fλ 若f,λ const . 则V const2.干涉量测原理3.镭射干涉仪:一般镭射干涉仪均为氦氖镭射,其镭射光为红色波长0.6329μm长期稳定误差0.05ppm以下(10个波长相差0.5个波)其优点:a.测量范围大b.简化以往光学仪器结构c.测量速度快缺点:易受大气环境影响因波长常会随温度、气压、湿度而变化(因镭射光以空气为传递介质)4.镭射干涉仪一般量测项目:(一)定位精度、距离量测、重复性(二)速度、加速度、动态量测(三)角度量测:a.垂直方向角度(pitch)b.水平方向角度(yaw)(四)真直度量测:a.垂直方向b.水平方向(五)直角度量测(六)平面度量测(七)平行度量测(八)旋转角度量测注意事项:(1)三脚架置于待测物适当位置,地基稳固不可摇晃及避免人员和机器碰触的地方(2)三脚架之水平气泡调至中央位置固定(3)信号线之插头,红点表示向上,各线接头缺口部份确实吻合方可插入(4)各电源线、信号线连接或拔除时,各仪器需均在OFF状态,否则会对仪器造成伤害(5)给予稳定独立电源,确实不漏电环境中使用(6)短距离量测(50mm内)亦产生余弦误差,先校直度再作定位(6)对焦时避免反射回来的镭射光打在镭射光射出口处(7)镭射先热机稳定后,再做镭射量测(8)操作中确认XC80(环境补偿系统)是监控中,每7秒各侦测一项,以42秒为一次循环(9)镭射干涉仪设备存放地点尽量保持干燥镭射干涉仪防止误差及保养1﹒镭射干涉仪防止误差(1)量测周围环境应尽量避免太阳光直接照射或突然流动的风产生扰流现象(2)装设干涉镜及反射镜在被测机台上时,必须牢固,否则机台移动会造成不可预期的量测误差(3)环境侦测感应器与材料温度感应器是否作动,必须于量测前确实检查,以免造成不必要的误差(4)要获得最佳精度并减少误差,建议遵守下列规定:a﹒在校验环境条件中执行量测b﹒激光束需作确实校直c﹒需注意量测时的周围条件d﹒牢固地装设镜组(3)在量测执行中不可因其它因素而中断,量测必须一次完成检验,若发生量测中断情形,必须重新执行检验2﹒镭射干涉仪保养方法(1)使用时应防止碰撞及震动(2)工作完毕应循操作方法反顺序逐一拆卸并且擦拭干净置回仪器盒内(3)金属平台在使用完后应擦拭干净(4)干涉镜及反射镜片应使用光学镜片专用擦拭纸做圆形回转擦拭(注意严禁使用酒精或具有挥化性及腐蚀性之清洁液擦拭,请干擦,因镜面有镀一层蓝色薄墨,而激光束是靠此薄墨产生折射与反射,如果使用具有挥化性或腐蚀性之清洁液会将此薄墨破坏,如果镜面没有薄墨折射率既减弱而影响光强,且无法再镀上此薄墨,请注意小心使用)(5)应小心搬运尤其对镜片类应有适当防护与防震,暂不用时以干净东西覆盖安全注意事项1.镭射光属二级镭射,建议勿长时间直视镭射光2.镭射预热时可将镭射光闸暂时关闭,镜组对焦时再予以打开3.对焦时尽量避免反射之镭射光打在镭射头的镭射发射出口处,以免镭射造成不良影响4.架设镜组前,先将机器欲测轴全行程来回移动,观察机器移动空间并决定镜组架设位置,当镜组架设至机台后,使用手动慢速移动机器确定移动空间无其它干涉物后,机器才可改为自动移动5.架设或操作镭射干涉仪时,闲杂人等避免靠近,以免拌到电源线或传输线6.确认电压伏特是否正确,并且所使用的电力来源尽量能够独立,并加稳压器.镭射光原理及特性1.光的相关原理光为一种无质量的微粒子(牛顿)光为一种电磁波(马克士威尔)光具有粒子与波动的性质2.光的特性方向性直线性波动性3.波的基本物理量频率f、周期T、振幅A、波长λ、其中波长是长度单位4.何谓镭射光对某种元素施予能量,使其原来稳定的基态(低能阶)变为不稳定的激态(高能阶),元素会由激态(高能阶)释放出能量后变回原来的基态(低能阶) 再释放能量的过程中会产生一种光,我们谓之镭射光5.镭射光之特性A.高单频性:光的频率即是色,高纯频率即是高单色,一般可见光包含红、澄、黄、绿、蓝、靛、紫、频率纯度较低B.高方向性:镭射光配合聚光镜的发散角度非常小,而一般光线其扩散角度都非常大C.高亮度性:其光线亮度比一般光线亮度大数倍(视镭射而定)硬件介绍XL80 镭射头XC80 环境补偿系统8XC80 环境补偿系统插槽示意图夹持器组线性定位量测镜组角度量测镜组Z轴直度量测镜组及附件垂直度量测镜平坦度量测镜组旋转轴量测系统镭射头微调平台重负荷三脚架镭射架设联机流程图1﹒镭射架设及量测流程表15定位量测原理及操作1﹒线性定位量测原理:(一)架设方式:干涉镜不动,移动反射镜反射镜不动,移动干涉镜(二)何谓线性定位精度:CNC机器执行时,程序之坐标点未必是机器的坐标点,程序坐标点为理想值,机器坐标点为实际值,两者之间差为机器的定位精度(三)线性定位误差原因:误差原因可能是导程误差、控制器误差、机器几何误差及震动等原因(四)线性定位量测的目的:量测出机台可能因零件和组装所造成的误差,可利用机器参数补偿或重新组装改进机器加工机精度,确保机器加工的质量(五)镭射干涉仪定位量测发生误差的原因:a﹒空气、温度、湿度、气压等影响b﹒待测物之热膨胀系数c﹒电子误差d﹒死径误差(图一)e﹒阿倍(ABBE)误差(图二)f﹒余弦(COS)误差(图三)g﹒震动误差h﹒镜组热膨胀飘移镭射干涉仪量测数据是以数值方式显示,并没有一般量测时有人为读值判定所产生的误差162﹒量测方式a﹒线性(linear)方式---单向---2次b﹒线性(linear)方式---双向---2次17C﹒朝圣(pilgrim)方式---单向---2次d﹒朝圣(pilgrim)方式---双向---2次18e﹒钟摆(pendulum)方式---单向---2次f﹒钟摆(pendulum)方式---单向---2次镭射架设易发生之误差1﹒死径误差(如图一所示)˙死径误差是一种与使用XC80 自动补偿的线性量测过程中的环境因子变化有关的误差。
xl80激光干涉仪原理
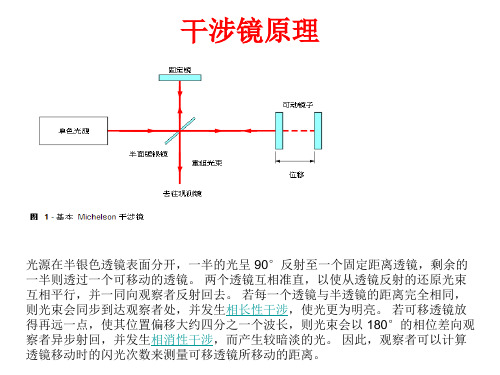
• 将一个反光镜牢固地接上分光镜,形成一个固定长度的基准臂。 而另一个反光镜可以相对于分光镜移动,形成可变长度的测量臂。
雷尼绍激光干涉仪测试原理
根据光的叠加和干 涉原理, 凡光程差 等于波长整数倍的 位置, 振动加强, 产 生明条纹(如图2 ( a) 所示); 凡光程差等于半波 长奇数倍的位置, 振动减弱, 产生 暗条纹(如图2 ( b) 所示)。
线性干涉原理运动测量如果测量光路长度改变角锥反射镜c移动干涉光束的相对相位将改变由此产生的相长干涉和相消干涉的循环将导致叠加光束强度的明暗周期变化角锥反射镜每移动316nm因为此移动会造成633nm的光路长度变化就会出现一个光强变nm的测量干涉测量法的原理一个角锥反射镜紧紧固定在分光镜上形成固定长度参考光束
辨率 (1 nm) 的测量
干涉测量法的原理
• 一个角锥反射镜紧紧固定在分光镜上,形成固定长度参考光束。 另一个角锥反射镜相对于分光镜移动,形成变化长度测量光束。
• 从激光头射出的激光光束 (1) 具有单一频率,标称波长为0.633 μm,长期波长稳定性(真空中)优于0.05 ppm。当此光束到达 偏振分光镜时,被分成两束光— 反射光束 (2) 和透射光束 (3) 。 这两束光被传送到各自的角锥反射镜中,然后反射回分光镜中, 在嵌于激光头中的探测器中形成干涉光束。
• 如果两光程差不变化,探测器将在相长干涉和相消干涉的两端之 间的某个位置观察到一个稳定的信号。
• 尽管目前的干涉仪更为精密,但测量距离精度达到±0.5 ppm或 更高时仍采用上述基本原理。如果两光程差发生变化,每次光路 变化时探测器都能观察到相长干涉和相消干涉两端之间的信号变 化。这些变化(条纹)被数出来,用于计算两光程差的变化。测 量的长度等于条纹数乘以激光波长的一半。
雷尼绍xl80使用介绍
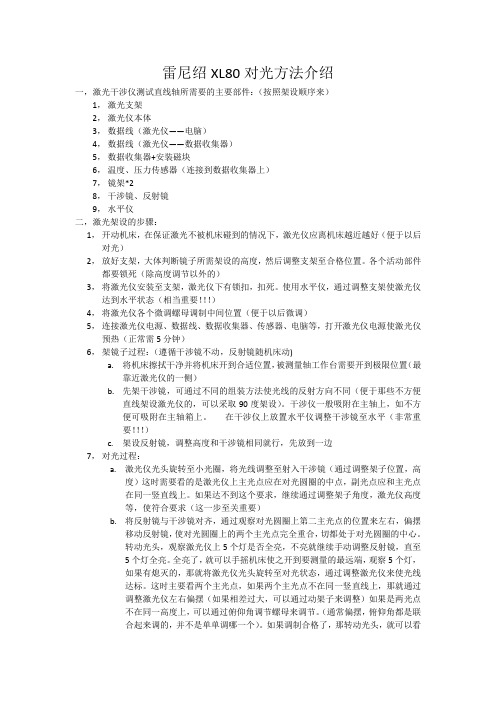
雷尼绍XL80对光方法介绍一,激光干涉仪测试直线轴所需要的主要部件:(按照架设顺序来)1,激光支架2,激光仪本体3,数据线(激光仪——电脑)4,数据线(激光仪——数据收集器)5,数据收集器+安装磁块6,温度、压力传感器(连接到数据收集器上)7,镜架*28,干涉镜、反射镜9,水平仪二,激光架设的步骤:1,开动机床,在保证激光不被机床碰到的情况下,激光仪应离机床越近越好(便于以后对光)2,放好支架,大体判断镜子所需架设的高度,然后调整支架至合格位置。
各个活动部件都要锁死(除高度调节以外的)3,将激光仪安装至支架,激光仪下有锁扣,扣死。
使用水平仪,通过调整支架使激光仪达到水平状态(相当重要!!!)4,将激光仪各个微调螺母调制中间位置(便于以后微调)5,连接激光仪电源、数据线、数据收集器、传感器、电脑等,打开激光仪电源使激光仪预热(正常需5分钟)6,架镜子过程:(遵循干涉镜不动,反射镜随机床动)a.将机床擦拭干净并将机床开到合适位置,被测量轴工作台需要开到极限位置(最靠近激光仪的一侧)b.先架干涉镜,可通过不同的组装方法使光线的反射方向不同(便于那些不方便直线架设激光仪的,可以采取90度架设)。
干涉仪一般吸附在主轴上,如不方便可吸附在主轴箱上。
在干涉仪上放置水平仪调整干涉镜至水平(非常重要!!!)c.架设反射镜,调整高度和干涉镜相同就行,先放到一边7,对光过程:a.激光仪光头旋转至小光圈,将光线调整至射入干涉镜(通过调整架子位置,高度)这时需要看的是激光仪上主光点应在对光圆圈的中点,副光点应和主光点在同一竖直线上。
如果达不到这个要求,继续通过调整架子角度,激光仪高度等,使符合要求(这一步至关重要)b.将反射镜与干涉镜对齐,通过观察对光圆圈上第二主光点的位置来左右,偏摆移动反射镜,使对光圆圈上的两个主光点完全重合,切都处于对光圆圈的中心。
转动光头,观察激光仪上5个灯是否全亮,不亮就继续手动调整反射镜,直至5个灯全亮。
XL-80激光干涉仪为线纹尺测量系统提供精准可靠的位置补偿解决方案
雷尼绍XL-80系列激光干涉仪
详情请访问:/scl
雷尼绍(上海)贸易有限公司
中国上海市静安区江场三路288号 18幢楼1楼 200436
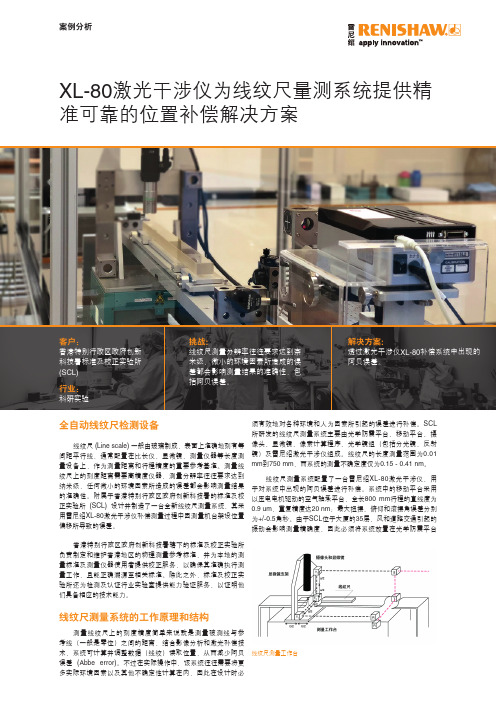
雷尼绍XL-80激光干涉仪在系统中所扮演的角色是补偿测 量系统中的误差,无论是移动平台的直线度、线纹尺的放置位 置,还是反射镜的位置等,在架设时都难免会存在角度偏摆, 导致在测量时出现所谓的阿贝误差。系统在设计上使用激光干 涉仪,以对称形式在移动平台两边的轴上进行测量,任何因角 度偏移所导致的阿贝误差值改变都会被另一边轴的激光所补 偿。而干涉仪的架设采用了典型的线性测量配置,如上页插图 所示,激光束通过分光镜S分成两路,一路形成参考光束经转 向镜T及反射镜R回到激光源探测器,另一路则通过转向镜T1、 T2、T3及反射镜R形成长度变化的测量光束。另外,XL-80干涉 仪在测量过程中也补偿了因环境造成的潜在误差,其内置的压 力和湿度传感器精度分别达1 mbar和6% RH,外置的材料和空 气传感器精度分别达0.1和0.2度。数据显示,在干涉仪的帮助 下,系统整体减少约95%的阿贝误差。
案例分析
XL-80激光干涉仪为线纹尺量测系统提供精 准可靠的位置补偿解决方案
客户: 香港特别行政区政府创新 科技署标准及校正实验所 (SCL)
行业: 科研实验
挑战: 线纹尺量分辨率往往要求达到奈 米级,微小的环境因素所造成的误 差都会影响测量结果的准确性,包 括阿贝误差。
解决方案: 透过激光干涉仪XL-80补偿系统中出现的 阿贝误差。
雷尼绍XL-80激光干涉仪是目前市场上真正快速、精确、 便携的校准系统。精确稳定的激光源和准确的XC-80环境补偿 器,保证了±0.5 ppm(在空气环境中)的线性测量精度。系统 以高达50 kHz的频率读取数据,最高线性测量速度可达4 m/s, 即使在最高速度下线性分辨率仍可达1 nm。所有测量选项(不 仅是线性)均采用干涉法测量,确保所记录数据的精度。XL-80 配备先进、易用的人性化操作软件,为用户提供最全面的机器 校准方案。
雷尼绍XL80激光干涉仪操作手册

镭射干涉仪操作手册手册内容一.RENISHAW 公司简介 1二.镭射干涉仪原理 2(1)波的速度 3(2)干涉量测原理 3(3)镭射干涉仪 4(4)镭射干涉仪一般量测项目 4三.注意事项 5四.镭射干涉仪防止误差及保养 5(1)镭射干涉仪防止误差 5(2)镭射干涉仪保养方法 6五.安全及注意事项 6六.镭射光原理及特性7七.镭射硬件介绍8八.镭射架设流程图15九.定位量测原理及操作16(1)线性定位量测原理16(2)量测方式17十.镭射易发生之人为架设误差20(1)死径误差20(2)余弦误差21(3)阿倍平移误差21 十一.镭射操作之步骤22(1)软件安装之步骤22(2)执行量测软件22(3)定位量测硬件架设之操作23(4)镜组架设前之注意事项24(5)镜组架设之步骤24 十二.定位量测之程序范例29 十三.定位量测之软件操作步骤30 热漂移量测38 快速功能键44 十四.动态软件量测之操作45(1)动态量测硬件之架设45(2)执行量测之软件46(3)位移与时间48(4)速度与时间49(5)加速度与时间50 十五.角度量设之操作52(1)注意事项52(2)镜组架设的种类53(3)镜组架测之步骤54(4)角度量测之软件操作步骤57 十六.RX10旋转轴之量测62(1)说明62(2)硬件配件之介绍62(3)硬件操作之步骤64(4)软件操作之步骤67 十七.直度量测之操作75(1)直度之分类75(2)直度量测之硬件架设75(3)镜组架设之步骤75(4)直度软件之操作步骤80 十八.Z轴直度镜组织架设方法85 十九.垂直度量测之操作89(1)垂直度镜组架设之步骤89(2)软件操作之步骤95 二十.平面度量测之原理与操作101(1)硬设备101(2)操作之原理102(3)镜组架设之步骤102(4)软件操作之步骤110。
雷尼绍XL80激光干涉仪操作手册汇总
雷尼绍XL80激光干涉仪操作手册汇总镭射干涉仪原理镭射干涉仪是利用光的干涉原理来进行测量的仪器。
其原理包括波的速度、干涉量测原理和镭射干涉仪的概念。
通过镭射干涉仪进行量测可以得到高精度的数据。
注意事项在使用镭射干涉仪时,需要注意一些事项,以保证测量的准确性。
例如,需要避免震动和光源的干扰。
同时,还需要注意仪器的保养和维护。
镭射干涉仪防止误差及保养为了保证镭射干涉仪的测量准确性,需要注意防止误差的产生。
其中包括死径误差、余弦误差和阿倍平移误差等。
此外,还需要进行仪器的保养和维护,以延长其使用寿命。
安全及注意事项在使用镭射干涉仪时,需要注意安全问题。
例如,需要避免直接观察镭射光线,以免对眼睛造成伤害。
同时,还需要注意仪器的保护,避免损坏。
镭射光原理及特性镭射光具有高度的单色性和相干性,可以用于进行高精度的测量。
镭射光的特性还包括方向性、激光功率密度大等。
镭射硬件介绍镭射干涉仪的硬件包括光学元件、探测器等部分。
其中,镜组是非常重要的部分,需要进行精确的架设。
此外,还需要注意光源的选择和调节。
定位量测原理及操作定位量测原理包括线性定位量测原理和量测方式。
在进行定位量测时,需要注意仪器的硬件架设和软件操作。
其中,线性定位量测原理是常用的一种方法。
镭射易发生之人为架设误差在进行镭射干涉仪的架设时,容易发生人为误差。
其中包括死径误差、余弦误差和阿倍平移误差等。
需要注意这些误差的产生,并进行相应的纠正。
镭射操作之步骤在进行镭射干涉仪的操作时,需要遵循一定的步骤。
包括软件安装、执行量测软件、定位量测硬件架设之操作、镜组架设前之注意事项和镜组架设之步骤等。
定位量测之程序范例定位量测的程序范例可以帮助用户更好地了解仪器的使用方法。
通过程序范例的研究,可以更加熟练地掌握仪器的操作技巧。
定位量测之软件操作步骤在进行定位量测时,软件操作也是非常重要的一部分。
需要注意软件的安装和使用方法,以保证测量的准确性。
热漂移量测热漂移量测是一种常见的测量方法,可以用于测量物体在温度变化下的形变情况。
雷尼绍激光干涉仪产品简介
apply innovationRENISHAW雷尼绍 XL-80 激光测量系统 • Renishaw简介 • 激光的介绍 • 激光干涉仪系统组件 • 雷尼绍激光干涉仪的测试原理 • 测量规格 • 典型案例分析 • 荣誉客户apply innovationRENISHAW简介• 雷尼绍公司在计量学和拉曼光谱仪器领域居世界领先地位。
总 部 (Renishaw plc) 位于英国伦敦西部的格劳斯特郡(Gloucestershire)。
她是一家 跨国公司,在世界各地有14家子公司。
中国大陆的业务由雷尼绍(香港)有限公司 归口负责。
• 30多年来,Renishaw一直是计量、即测量科学领域的创新者,实现了按照国际标准 进行测量。
在计量、运动控制、机器校准、牙科CAD/CAM及光谱学领域,Renishaw以 创新产品提高精度、效率和质量 • 机床测量和校准用的激光干涉仪和球感仪系统;高精度定位反馈编码器系统-servo 代理apply innovation基本概念 – 激光– 激光头输出的光束是正弦波的激光. 激光的波长是633nm 在雷尼绍XL-80激光 测试系统中。
Wavelength– 激光有以下3个重要特性: • 激光的波长是精确已知的可以被应用于高精度测量 • 激光的波长很短可以应用于高分辨率的测量 • 激光的相位是一致的,空间相干性apply innovationXL-80 系统组件XC-80USB - one sensor reading update every 7 secsXL-80LaserXLUSB - 50kHz fringe count data and statusNotebook PCQuickView XLapply innovationXL-80激光头性能指标系统精度(整个工作范围)±0.5ppm (0~40 ℃) 0.05ppm 0.001 um 4.0m/sec 50KHz 0 - 80 metres(在长距光学镜配合下)激光稳频精度 分辨率 最大测量速度 最高采样频率 测量范围 预热时间更短 激光信号强度指示灯~5分钟专利技术ABCDHapply innovationXL-80激光头性能指标• 外接电源• USB接口– Mini-USB 端口 – 标准USB电缆• DIP开关 & 辅助I/O端口– – – – 遥控触发 正交输出 模拟信号输出 长距离接收apply innovationXC-80补偿单元和传感器“智能”化传感器设计 • 通过RS485传送数字信号 • 可更换的传感器电缆 • 更快的刷新频率,每隔7秒 • 更紧凑的电缆接头设计 • 自降温设计空气湿度 空气压力精度: ±1.0 mbar 精度: ±6%空气温度精度: ±0.2 °C材料温度精度: ±0.1 °Capply innovationXC-80补偿单元和传感器• 激光的波长取决于光路中介质的折射率,空气折射率受环境的温度 、空气压力、相对湿度、材料温度等因素影响,所以renishaw开发 了XC-80补偿单元。
Renishaw(雷尼绍)_XL-80激光干涉仪组件

A-9908-0301
QuickView XL software
QuickView™ is a simple to use and intuitive software package to capture, review and save dynamic data at up to 4 m/s and 50 kHz from the Renishaw XL-80 laser system. Ideal for motion system analysis. Minimum PC requirements 512 MB RAM, 1 GHz processor and 100 MB free hard disk space. Windows XP (SP2) and Windows Vista compatible.
Air temp sensor & cable kit
Range 0Байду номын сангаас -40º C, cable length 5 m, magnetic attachment. Sensor not available separately.
A-9908-0878
Material temp sensor & cable kit
For more information please visit /lasercalsupport
Application note
XL system support disk
Specific manual for the XL80 system. Minimum PC requirements 512 MB RAM, 1 GHz processor and 100 MB free hard disk space. Included with all XL and XC kits.
雷尼绍XL-80激光校准仪说明书

D D
B A
B A
计算机
典型双轴设定
* 软件以光盘形式提供,包括以下语言:英语、德语、法语、意大利语、西班牙语、日语、简体中文、繁体中文、俄语及韩语。 6
用于实时动态分析的QuickViewXL™软件
实时显示线性位移、 速度和加速度分析的激光 测量数据。
QuickViewXL™软件
QuickViewXL™软件包简单易用,界面直观,它能 够采集、复现和保存来自雷尼绍XL-80激光系统的动态 数据。
雷尼绍使用其XC-80环境补偿单元和高精度环境传 感器对激光波长进行补偿。
XC-80补偿系统和传感器能够在整个系统工作范 围内保持精度。因此,在0 - 40 ºC及整个空气压力范围 内,可以保持±0.5 ppm的线性测量精度(参阅与同行系 统的图形比较)。
8
精度单位:ppm(百万分之一)
精度单位:ppm(百万分之一)
大多数激光测量中的最大不确定度是由环境条件 与标称值之间的差异引起的(空气温度、空气压力、 相对湿度),即使环境条件的微小变化也会改变激光 波长和相关测量读数。例如,下列变化会使激光波长 增加0.25 ppm(百万分之一):
空气温度升高0.26 °C 空气压力下降0.93毫巴
当空气温度、相对湿度、和空气压力与标称值之间 的误差影响组合到一起,可能导致20-30 ppm的测量不 确定度(即使测试条件保持稳定也不例外)。
其他同行厂家
雷尼绍XL-80
ºC 系统线性测量精度与环境温度
其他同行厂家
雷尼绍XL-80
ºC 10 ppm/ºC时的标准材料温度的归一化精度
系统优点
其他影响精度的因素
测量归一化
激光稳频精度 – 通过热控制技术将激光管长度变化控 制 在几纳米范围内,达到1年内精度为±0.05 ppm, 1小时内精度为±0.02 ppm。
雷尼绍XL80激光干涉仪操作手册.概要
镭射干涉仪操作手册手册内容一.RENISHAW 公司简介 1二.镭射干涉仪原理 2(1)波的速度 3(2)干涉量测原理 3(3)镭射干涉仪 4(4)镭射干涉仪一般量测项目 4三.注意事项 5四.镭射干涉仪防止误差及保养 5(1)镭射干涉仪防止误差 5(2)镭射干涉仪保养方法 6五.安全及注意事项 6六.镭射光原理及特性7七.镭射硬件介绍8八.镭射架设流程图15九.定位量测原理及操作16(1)线性定位量测原理16(2)量测方式17十.镭射易发生之人为架设误差20(1)死径误差20(2)余弦误差21(3)阿倍平移误差21 十一.镭射操作之步骤22(1)软件安装之步骤22(2)执行量测软件22(3)定位量测硬件架设之操作23(4)镜组架设前之注意事项24(5)镜组架设之步骤24 十二.定位量测之程序范例29 十三.定位量测之软件操作步骤30 热漂移量测38 快速功能键44 十四.动态软件量测之操作45(1)动态量测硬件之架设45(2)执行量测之软件46(3)位移与时间48(4)速度与时间49(5)加速度与时间50 十五.角度量设之操作52(1)注意事项52(2)镜组架设的种类53(3)镜组架测之步骤54(4)角度量测之软件操作步骤57 十六.RX10旋转轴之量测62(1)说明62(2)硬件配件之介绍62(3)硬件操作之步骤64(4)软件操作之步骤67 十七.直度量测之操作75(1)直度之分类75(2)直度量测之硬件架设75(3)镜组架设之步骤75(4)直度软件之操作步骤80 十八.Z轴直度镜组织架设方法85 十九.垂直度量测之操作89(1)垂直度镜组架设之步骤89(2)软件操作之步骤95 二十.平面度量测之原理与操作101(1)硬设备101(2)操作之原理102(3)镜组架设之步骤102(4)软件操作之步骤110RENISHAW 公司简介RENISHAW为一家英国公司,产品营销全世界,主要产品有三次元量床之测头、测针、BALLBAR循圆测试仪、镭射干涉仪・・・・・・・・等等及产品经NPL(英国国家标准)认证为ISO 9001之合格厂商RENISHAW公司为机器设备制造商提供量测检验系统的仪器,提供各种用于机器精度检定的量测设备进而改善机器的精度RENISHAW XL80 高性能镭射干涉仪是机床、三次元坐标量床及其它定位装置精度校准用的高性能仪器,由于最新电子技术的应用,使其镭射波长非常稳定并保持了低成本高效率的工作流程RENISHAW 产品介绍:镭射干涉仪量测系统循圆测试仪器(BALLBAR)量测系统三次元测头测针系列黏贴式光学尺系列镭射干涉仪量测原理MICHELSON E0 干涉原理两个频率振幅波长相同的镭射光波因相位变化而发生不同程度的干涉a.相长干涉(建设性干涉)b.相消干涉(破坏性干涉)相长干涉相消干涉1.波的速度V=fλ 若f,λ const . 则V const2.干涉量测原理3.镭射干涉仪:一般镭射干涉仪均为氦氖镭射,其镭射光为红色波长0.6329μm长期稳定误差0.05ppm以下(10个波长相差0.5个波)其优点:a.测量范围大b.简化以往光学仪器结构c.测量速度快缺点:易受大气环境影响因波长常会随温度、气压、湿度而变化(因镭射光以空气为传递介质)4.镭射干涉仪一般量测项目:(一)定位精度、距离量测、重复性(二)速度、加速度、动态量测(三)角度量测:a.垂直方向角度(pitch)b.水平方向角度(yaw)(四)真直度量测:a.垂直方向b.水平方向(五)直角度量测(六)平面度量测(七)平行度量测(八)旋转角度量测注意事项:(1)三脚架置于待测物适当位置,地基稳固不可摇晃及避免人员和机器碰触的地方(2)三脚架之水平气泡调至中央位置固定(3)信号线之插头,红点表示向上,各线接头缺口部份确实吻合方可插入(4)各电源线、信号线连接或拔除时,各仪器需均在OFF状态,否则会对仪器造成伤害(5)给予稳定独立电源,确实不漏电环境中使用(6)短距离量测(50mm内)亦产生余弦误差,先校直度再作定位(6)对焦时避免反射回来的镭射光打在镭射光射出口处(7)镭射先热机稳定后,再做镭射量测(8)操作中确认XC80(环境补偿系统)是监控中,每7秒各侦测一项,以42秒为一次循环(9)镭射干涉仪设备存放地点尽量保持干燥镭射干涉仪防止误差及保养1﹒镭射干涉仪防止误差(1)量测周围环境应尽量避免太阳光直接照射或突然流动的风产生扰流现象(2)装设干涉镜及反射镜在被测机台上时,必须牢固,否则机台移动会造成不可预期的量测误差(3)环境侦测感应器与材料温度感应器是否作动,必须于量测前确实检查,以免造成不必要的误差(4)要获得最佳精度并减少误差,建议遵守下列规定:a﹒在校验环境条件中执行量测b﹒激光束需作确实校直c﹒需注意量测时的周围条件d﹒牢固地装设镜组(3)在量测执行中不可因其它因素而中断,量测必须一次完成检验,若发生量测中断情形,必须重新执行检验2﹒镭射干涉仪保养方法(1)使用时应防止碰撞及震动(2)工作完毕应循操作方法反顺序逐一拆卸并且擦拭干净置回仪器盒内(3)金属平台在使用完后应擦拭干净(4)干涉镜及反射镜片应使用光学镜片专用擦拭纸做圆形回转擦拭(注意严禁使用酒精或具有挥化性及腐蚀性之清洁液擦拭,请干擦,因镜面有镀一层蓝色薄墨,而激光束是靠此薄墨产生折射与反射,如果使用具有挥化性或腐蚀性之清洁液会将此薄墨破坏,如果镜面没有薄墨折射率既减弱而影响光强,且无法再镀上此薄墨,请注意小心使用)(5)应小心搬运尤其对镜片类应有适当防护与防震,暂不用时以干净东西覆盖安全注意事项1.镭射光属二级镭射,建议勿长时间直视镭射光2.镭射预热时可将镭射光闸暂时关闭,镜组对焦时再予以打开3.对焦时尽量避免反射之镭射光打在镭射头的镭射发射出口处,以免镭射造成不良影响4.架设镜组前,先将机器欲测轴全行程来回移动,观察机器移动空间并决定镜组架设位置,当镜组架设至机台后,使用手动慢速移动机器确定移动空间无其它干涉物后,机器才可改为自动移动5.架设或操作镭射干涉仪时,闲杂人等避免靠近,以免拌到电源线或传输线6.确认电压伏特是否正确,并且所使用的电力来源尽量能够独立,并加稳压器.镭射光原理及特性1.光的相关原理光为一种无质量的微粒子(牛顿)光为一种电磁波(马克士威尔)光具有粒子与波动的性质2.光的特性方向性直线性波动性3.波的基本物理量频率f、周期T、振幅A、波长λ、其中波长是长度单位4.何谓镭射光对某种元素施予能量,使其原来稳定的基态(低能阶)变为不稳定的激态(高能阶),元素会由激态(高能阶)释放出能量后变回原来的基态(低能阶) 再释放能量的过程中会产生一种光,我们谓之镭射光5.镭射光之特性A.高单频性:光的频率即是色,高纯频率即是高单色,一般可见光包含红、澄、黄、绿、蓝、靛、紫、频率纯度较低B.高方向性:镭射光配合聚光镜的发散角度非常小,而一般光线其扩散角度都非常大C.高亮度性:其光线亮度比一般光线亮度大数倍(视镭射而定)硬件介绍XL80 镭射头XC80 环境补偿系统8XC80 环境补偿系统插槽示意图夹持器组线性定位量测镜组角度量测镜组Z轴直度量测镜组及附件垂直度量测镜平坦度量测镜组旋转轴量测系统镭射头微调平台重负荷三脚架镭射架设联机流程图1﹒镭射架设及量测流程表15定位量测原理及操作1﹒线性定位量测原理:(一)架设方式:干涉镜不动,移动反射镜反射镜不动,移动干涉镜(二)何谓线性定位精度:CNC机器执行时,程序之坐标点未必是机器的坐标点,程序坐标点为理想值,机器坐标点为实际值,两者之间差为机器的定位精度(三)线性定位误差原因:误差原因可能是导程误差、控制器误差、机器几何误差及震动等原因(四)线性定位量测的目的:量测出机台可能因零件和组装所造成的误差,可利用机器参数补偿或重新组装改进机器加工机精度,确保机器加工的质量(五)镭射干涉仪定位量测发生误差的原因:a﹒空气、温度、湿度、气压等影响b﹒待测物之热膨胀系数c﹒电子误差d﹒死径误差(图一)e﹒阿倍(ABBE)误差(图二)f﹒余弦(COS)误差(图三)g﹒震动误差h﹒镜组热膨胀飘移镭射干涉仪量测数据是以数值方式显示,并没有一般量测时有人为读值判定所产生的误差162﹒量测方式a﹒线性(linear)方式---单向---2次b﹒线性(linear)方式---双向---2次17C﹒朝圣(pilgrim)方式---单向---2次d﹒朝圣(pilgrim)方式---双向---2次18 e﹒钟摆(pendulum)方式---单向---2次f﹒钟摆(pendulum)方式---单向---2次镭射架设易发生之误差1﹒死径误差(如图一所示)˙死径误差是一种与使用XC80 自动补偿的线性量测过程中的环境因子变化有关的误差。
雷尼绍激光干涉仪产品简介
apply innovationRENISHAW雷尼绍 XL-80 激光测量系统 • Renishaw简介 • 激光的介绍 • 激光干涉仪系统组件 • 雷尼绍激光干涉仪的测试原理 • 测量规格 • 典型案例分析 • 荣誉客户apply innovationRENISHAW简介• 雷尼绍公司在计量学和拉曼光谱仪器领域居世界领先地位。
总 部 (Renishaw plc) 位于英国伦敦西部的格劳斯特郡(Gloucestershire)。
她是一家 跨国公司,在世界各地有14家子公司。
中国大陆的业务由雷尼绍(香港)有限公司 归口负责。
• 30多年来,Renishaw一直是计量、即测量科学领域的创新者,实现了按照国际标准 进行测量。
在计量、运动控制、机器校准、牙科CAD/CAM及光谱学领域,Renishaw以 创新产品提高精度、效率和质量 • 机床测量和校准用的激光干涉仪和球感仪系统;高精度定位反馈编码器系统-servo 代理apply innovation基本概念 – 激光– 激光头输出的光束是正弦波的激光. 激光的波长是633nm 在雷尼绍XL-80激光 测试系统中。
Wavelength– 激光有以下3个重要特性: • 激光的波长是精确已知的可以被应用于高精度测量 • 激光的波长很短可以应用于高分辨率的测量 • 激光的相位是一致的,空间相干性apply innovationXL-80 系统组件XC-80USB - one sensor reading update every 7 secsXL-80LaserXLUSB - 50kHz fringe count data and statusNotebook PCQuickView XLapply innovationXL-80激光头性能指标系统精度(整个工作范围)±0.5ppm (0~40 ℃) 0.05ppm 0.001 um 4.0m/sec 50KHz 0 - 80 metres(在长距光学镜配合下)激光稳频精度 分辨率 最大测量速度 最高采样频率 测量范围 预热时间更短 激光信号强度指示灯~5分钟专利技术ABCDHapply innovationXL-80激光头性能指标• 外接电源• USB接口– Mini-USB 端口 – 标准USB电缆• DIP开关 & 辅助I/O端口– – – – 遥控触发 正交输出 模拟信号输出 长距离接收apply innovationXC-80补偿单元和传感器“智能”化传感器设计 • 通过RS485传送数字信号 • 可更换的传感器电缆 • 更快的刷新频率,每隔7秒 • 更紧凑的电缆接头设计 • 自降温设计空气湿度 空气压力精度: ±1.0 mbar 精度: ±6%空气温度精度: ±0.2 °C材料温度精度: ±0.1 °Capply innovationXC-80补偿单元和传感器• 激光的波长取决于光路中介质的折射率,空气折射率受环境的温度 、空气压力、相对湿度、材料温度等因素影响,所以renishaw开发 了XC-80补偿单元。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阴极
阳极
反射镜
氦氖 (HeNe) 混合气体
反射镜
• 当高压连接在阳极和阴极之间时,混合气体被激发,形成激光光束 • 当激光光束在两个反射镜之间来回共振时激光光强被放大 • 一些光透射出阳极反射镜,成为输出激光光束
高压 (HT) 电源
阴极 (0V)
激光管
镇流电阻器(阻止 电气震荡)
阳极 (1000V)
澳大利亚 • 奥地利 • 巴西 • 加拿大 • 中国(北京、上海、广州、沈阳、 青岛、成都) • 捷克 • 法国 • 德国 • 香港 • 台湾 • 印度 • 爱尔兰 • 以色列 • 意大利 • 日本 • 荷兰 • 波兰 • 俄罗斯 • 斯洛维尼亚 • 韩国 • 西班牙
工艺革新
• Renishaw制造自己的产品 • 获奖的RAMTIC制造系统 • Renishaw自动铣削、车削和检测
RLE光导纤维激光尺 — 系统概述
• 由于其物理尺寸及输出分辨率所限,HS10不适合用在机床市场以外的很多 应用场合
• 为了增强应用的灵活性,RLE光导纤维激光尺应运而生,它集干涉仪的性能 水平与光栅的简便性于一体
• 第一代RLE10于2001年7月推出
RLD10 0°
HS10激光头
HS10激光尺应用
Henri Line
RLE系统
RLD10 DI (差动干涉仪) RLD10 90°
Asquith
Giddings & Lewis 5
干涉测量法的原理
干涉测量法的原理
激光
激光输出可被视为正弦光波。 波长
6
• 从激光头射出的光波有三个关键特性: • 波长精确已知,能够实现精确测量 • 波长很短,能够实现精密测量或高分辨率测量 • 所有光波均为同相,能够实现干涉条纹
新产品及市场开发
无论您身在何处,都能享受到应 用及产品支持 • Renishaw在20多个国家/地区设有
办事处 • 专家型应用工程师对新应用及现有
设备的支持提供建议 • 服务快捷,让您的业务永不间断 • 很多产品提供可选的高级RBE(换
修)服务 — 我们在您提出请求的 当天即可发出更换件 • 故障排除及常见问题解答,请登录 /support
波长补偿
波长补偿
线性定位测量精度取决于激光波长的已知精度。这不仅与激光的稳频精度有关,而且还与周围环境参数有关。 尤其是气温、气压和相对湿度将会影响激光光束的波长(在空气中)。
公司简介
Renishaw公司是世界领先的计量 解决方案供应商,致力于提高制造业 和科研的生产力。
公司成立于1973年,提供坐标测 量机、数控机床及电子和半导体行业 制造自动化系统的解决方案。产品包 括各种测头、校准、光栅、编码器、 数字化扫描及光谱系统。
Renishaw坚信,成功源于专利和 创新产品及工艺、高质量制造技术以 及为所有市场就近提供客户支持的能 力 — 这依然体现了公司成立之初的朴 素理念:
• 通过专利创新技术实现有 机增长
• 1983年上市
Renishaw的商业策略
• 我们致力于通过不断开发专利产品 和创新的制造技术
• 我们是世界公认的自动化、航天和 零部件制造业的领导者和贡献者
• 在牙科、医学、电子和半导体市场 的份额不断增长
• 在截至2006年6月的财政年度销售 额逾1.75亿英镑
1-3 4-5 6-9 10 - 11 12 13 14 - 17 18 - 19 20 - 21 22 - 23 24 - 25 26 27 28 29 - 32 33 34 - 35 36 - 39 40 - 41 42
简介
本应用指南全面介绍了干涉测量法和Renishaw的相关产品,供销售代表、经销商和客户使用。
循环(明-暗-明) • 通过计算这些循环来测量移动 • 通过在这些循环之间进行相位细分,实现更高分辨率 (1 nm) 的测量
(B) 固定角锥反射镜
(A) 分光镜
输入光束 参考光束
测量光束 叠加光束
(C) 移动角锥反射镜 叠加光束的干涉条纹
干涉测量法的原理
干涉测量法的原理
尽管目前的干涉仪更为精密,但测量距离精度达到±0.5 ppm或更高时仍采用上述基本原理。 角锥反射镜
如果两光程差不变化,探测器将在相长干涉和相消 干涉的两端之间的某个位置观察到一个稳定的信号。
如果两光程差发生变化,每次光路变化时探测器都 能观察到相长干涉和相消干涉两端之间的信号变化。这 些变化(条纹)被数出来,用于计算两光程差的变化。 测量的长度等于条纹数乘以激光波长的一半。
应当注意到,激光波长将取决于光束经过的空气的 折射率。由于空气折射率会随着气温、压力和相对湿度 的变化而变化,用于计算测量值的波长值可能需要对这 些环境参数的变化进行补偿。在实践中,对于技术指标 中的测量精度,只有线性位移(定位精度)测量需要进 行此类补偿,在这种情况下两束光的光程差变化可能非 常大。
移动
9
激光源 探测器
侧视图
分光镜
角锥反射镜
一个角锥反射镜紧紧固定在分光镜上,形成固定长 度参考光束。另一个角锥反射镜相对于分光镜移动,形 成变化长度测量光束。
从 激 光头 射出 的 激 光光 束 (1) 具有单一频率,标称 波 长 为 0.633 µm,长 期 波 长 稳 定 性 ( 真 空 中 ) 优 于 0.05 ppm。当此光束到达偏振分光镜时,被分成两束光 — 反射光束 (2) 和透射光束 (3) 。这两束光被传送到各自 的角锥反射镜中,然后反射回分光镜中,在嵌于激光头 中的探测器中形成干涉光束。
氦氖激光管
• LASER是Light Amplification by Stimulated Emission of Radiation的缩写,意为通过受激发射线的 放射达到光的放大,即激光
• 大多数现代位移干涉仪都使用氦氖 (HeNe) 激光管。这些激光管具有633纳米 (nm) 的波长输出 • 氦氖激光管的构成如下所示:
快捷的服务与支持
Renishaw设有7个产品部门: • CMM – 坐标测量机用产品和传感器 • 机床 – 工件检测、工件找正、对刀
及刀具破损检测测头 • 牙科和数字化扫描 – 用于逆向工程
及牙科应用的数字化扫描产品 • 激光和校准 – 激光干涉仪(包括激
光尺)、球杆仪及转台 • 光栅 – 直线光栅及圆光栅产品 • 拉曼 – 光谱仪系统 • 测针 – 各种测头应用所需的测针
• 创新的产品设计提供具有专利的突 破性解决方案
• 创新的制造技术保证了性价比优异 的高质量产品
• 优质的客户支持和服务,卓而不群 • 通过新产品和扩大市场调研实现公
司的有机增长
公司宗旨
Renishaw公司设计、制造和供应 最高质量和可靠性的计量系统以使全 世界的用户能实现按溯源标准的几何 尺寸测量。
激光干涉仪
原理及应用概述
角度测量
平面度测量
线性测量
回转轴测量
垂直度测量
直线度测量
目录
简介 测量和校准产品 干涉测量法的原理 波长补偿 系统概述 激光系统应用 线性测量原理 角度测量原理 直线度测量原理 垂直度测量原理 平行度测量原理 对角线垂直度测量原理 平面度测量原理 回转轴测量原理 动态测量原理 双轴激光测量 系统组件及附件 常见问题解答 (FAQ) XL-80激光干涉仪系统主要规格 参考
• 研发和工程设计投资不断增长, 2006年研发费用占营业额16%以上
• 随着越来越多的子公司和代表处的 成立,销售网络不断壮大
• 全球员工逾2000
• Renishaw测头系统用于控制工序 质量
• 针对制造方法的设计缩短了开发新 产品的时间间隔
• 在英国和爱尔兰设有四个机械和电 子装配厂
分公司所在地
干涉
• 角锥反射镜将两束光返回到分光镜中,光束叠加并彼此干涉,可能是: • 相消干涉(如果两束光中的相位相反)。在此情况下,一束光的峰值被波谷抵消,产生暗条纹 • 也可能是相长干涉(如果两束光中的相位相同)。在此情况下,一束光的峰值被另一束光的波 峰加强,产生明条纹
运动测量
• 如果测量光路长度改变(角锥反射镜C移动),干涉光束的相对相位将改变 • 由此产生的相长干涉和相消干涉的循环将导致叠加光束强度的明暗周期变化 • 角锥反射镜每移动316 nm(因为此移动会造成633 nm的光路长度变化),就会出现一个光强变化
输出光束
• 激光光束包含两种正交模式(在上图中分别用红色和蓝色表示) • 这两种模式具有相近的频率(它们相差2 ppm)但处于垂直极化状态 • 激光增益曲线在下页显示
干涉测量法的原理
激光增益曲线
强度
干涉测量法的原理
不相等
F1 F2
频率
7
• 两种模式的强度用光敏二极管测量,通过加热器控制激光管长度来实现平衡 • 这使激光稳频精度保持在± 0.05 ppm以内 • 激光实现稳定输出后,即可用于进行干涉测量
Renishaw是一个重视环保和有 责任感的公司。我们将努力确保我公 司各方面的业务不对环境产生不利影 响。
Renishaw的New Mills总部1 Nhomakorabea简介
历史 - 因创新而诞生
• 1973年发明了世界上首个三 维触 发 式 测 头 , 用 以 解 决 Olympus (Concorde) 喷气 发动机的燃油管测量问题
新产品:
• 高速扫描系统 • CMM控制器 • 直线光栅 / 圆光栅 • 非接触式对刀系统 • 牙科扫描机 • 拉曼光谱仪 • 光导纤维传导的激光尺
新市场:
• 牙科 • 电子 • 半导体 • 艺术品修复 • 刑侦科学 • 电机
3
测量和校准产品
• 自1985年以来,Renishaw一直积极致力于激光干涉技术 的研发
我们提供的产品会提高您的产品 质量和效率,我们将通过优质的用户 服务令全体客户满意。