ISC-Aug. 2 2010
IEEE拒绝收录的138个会议列表-推荐下载

IEEE拒绝收录的138个会议列表2011-10-27 14:54:18| 分类:EI、ISTP检索国际 | 标签:ieee 收录 138 会议列表 |字号大中小订阅IEEE拒绝收录的138个会议列表138个会议名单如下:2010 2nd Asia-Pacific Conference on Information Processing (APCIP)2010 2nd International Asia Symposium on Intelligent Interaction and Affective Computing & 2010 2nd International onInnovation Management (ASIA-ICIM)2010 2nd International Conference on Future Computer and Communication (FCC) 2010 2nd International Conference on Information and Multimedia Technology (ICIMT)2010 2nd International Conference on Intellectual Technique in Industrial Practice (ITIP 2010)2010 2nd International Conference on Multimedia and Computational Intelligence (ICMCI)2010 2nd International Conference on Research Challenges in Computer Science (ICRCCS)2010 2nd International Symposium on Computer Network and Multimedia Technology (CNMT 2010)2010 3rd International Conference on Computational Intelligence and Industrial Application (PACIIA)2010 3rd International Conference on Environmental and Computer Science (ICECS) 2010 3rd International Conference on Machine Vision (ICMV)2010 3rd International Conference on Power Electronics and Intelligent Transportation System (PEITS)2010 4th International Conference on Intelligent Information Technology Application (IITA)2010 6th International Conference on MEMS, NANO, and Smart Systems (ICMENS) 2010 First International Conference on Cellular, Molecular Biology, Biophysics and Bioengineering (CMBB)2010 IIS 2nd International Conference on Signal Processing, Robotics and Automation (ICSRA 2010)2010 International Asia Conference on Optical Instrument and Measurement (ACPIM)2010 International Conference on Bio-Inspired Systems and Signal Processing (ICBSSP)2010 International Conference on Biology, Environment and Chemistry (ICBEC) 2010 International Conference on Broadcast Technology and MultimediaCommunication (BTMC)2010 International Conference on Circuit and Signal Processing (ICCSP)2010 International Conference on Communication and Vehicular Technology (ICCVT)2010 International Conference on Computational Intelligence and Vehicular System (CIVS)2010 International Conference on Computer and Computational Intelligence (ICCCI) 2010 International Conference on Computer and Software Modeling (ICCSM)2010 International Conference on Computer Science and Sports Engineering (CSSE) 2010 International Conference on Computer-Aided Manufacturing and Design (CMD)2010 International Conference on Construction and Project Management (ICCPM) 2010 International Conference on Digital Enterprise and Digital Manufacturing (DEDM)2010 International Conference on E-business, Management and Economics (ICEME) 2010 International Conference on Economics, Business and Management (ICEBM) 2010 International Conference on Electrical Engineering and Automatic Control (ICEEAC)2010 International Conference on Embedded Systems and Microprocessors (ICESM) 2010 International Conference on Engineering Education and Educational Technology (EEET)2010 International Conference on Future Biomedical Information Engineering (FBIE) 2010 International Conference on Future Computer, Control and Communication (FCCC)2010 International Conference on Future Industrial Engineering and Application (ICFIEA)2010 International Conference on Future Information Technology (ICFIT)2010 International Conference on Future Information Technology and Computing (FITC)2010 International Conference on Graphic and Image Processing (ICGIP)2010 International Conference on Information and Finance (ICIF)2010 International Conference on Information Security and Artificial Intelligence (ISAI)2010 International Conference on Intelligence and Information Technology (ICIIT) 2010 International Conference on Intelligent Network and Computing (ICINC)2010 International Conference on Management Science (ICMS)2010 International Conference on Management Science and Information Engineering (ICMSIE)2010 International Conference on Manufacturing Science and Technology (ICMST) 2010 International Conference on Measurement and Control Engineering (ICMCE) 2010 International Conference on Mechanical and Aerospace Engineering (ICMAE) 2010 International Conference on Mechanical Engineering, Robotics and Aerospace (ICMERA)2010 International Conference on Modeling, Simulation and Control (ICMSC 2010)2010 International Conference on Nano Science and Technology (ICNST)2010 International Conference on Nanotechnology and Biosensors (ICNB)2010 International Conference on Nuclear Energy and Engineering Technology (NEET)2010 International Conference on Physics Science and Technology (ICPST)2010 International Conference on Psychology, Psychological Sciences and Computer Science (PPSCS)2010 International Conference on Remote Sensing (ICRS)2010 International Conference on Semiconductor Laser and Photonics (ICSLP)2010 International Conference on Services Science, Management and Engineering (SSME)2010 International Conference on Signal and Information Processing (ICSIP)2010 International Conference on Software and Computing Technology (ICSCT) 2010 International Conference on Sport Medicine, Sport Science, and Computer Science (SMSSCS)2010 ISECS International Colloquium on Computing, Communication, Control, and Management (CCCM 2010)2010 Second International Conference on E-Learning, E-Business, Enterprise Information Systems, and E-Government(EEEE)2010 Second International Conference on Test and Measurement (ICMT)2010 Second International Seminar on Business and Information Management (ISBIM)2010 Third International Conference on Computer and Electrical Engineering (ICCEE)2010 Third International Conference on Education Technology and Training (ETT) 2010 Third International Symposium on Intelligent Ubiquitous Computing and Education (IUCE)2010 Third Pacific-Asia Conference on Web Mining and Web-Based Application (WMWA)2011 15th Global Chinese Conference on Computers in Education (GCCCE)2011 2nd Asia-Pacific Conference on Wearable Computing Systems (APWCS)2011 2nd International Conference on Biomedical Engineering and Computer Science (ICBECS)2011 2nd International Conference on Biotechnology and Food Science (ICBFS) 2011 2nd International Conference on Data Storage and Data Engineering (DSDE) 2011 2nd International Conference on Environmental Science and Technology (ICEST)2011 2nd International Conference on Financial Theory and Engineering (ICFTE) 2011 2nd International Conference on Mechanical, Industrial, and Manufacturing Technologies (MIMT)2011 2nd Intl Conf on Innovative Computing & Communication and 2010 Asia-Pacific Conf on Information Technology &Ocean Engineering, (CICC-ITOE)2011 2nd World Congress on Computer Science and Information Engineering (CSIE) 2011 3rd IEEE International Conference on Information Management and Engineering (ICIME)2011 3rd International Conference on Bioinformatics and Biomedical Technology (ICBBT 2011)2011 3rd International Conference on Computer and Automation Engineering (ICCAE)2011 3rd International Conference on Computer and Network Technology (ICCNT) 2011 3rd International Conference on Computer Design and Applications (ICCDA 2011)2011 3rd International Conference on Computer Modeling and Simulation (ICCMS) 2011 3rd International Conference on E-business and Information System Security (EBISS)2011 3rd International Conference on Machine Learning and Computing (ICMLC) 2011 3rd International Conference on Networks Security, Wireless Communications and Trusted Computing (NSWCTC)2011 3rd International Conference on Signal Acquisition and Processing (ICSAP) 2011 3rd International Workshop on Education Technology and Computer Science (ETCS)2011 4th IEEE International Conference on Computer Science and Information Technology (ICCSIT 2011)2011 IEEE International Conference on Information and Education Technology (ICIET)2011 IEEE International Conference on Smart Grid and Clean Energy Technologies (ICSGCE)2011 International Conference on Applied Physics and Mathematics (ICAPM 2011) 2011 International Conference on Bioinformatics and Computational Biology (ICBCB)2011 International Conference on Bioscience, Biochemistry and Bioinformatics (ICBBB)2011 International Conference on Communication and Electronics Information (ICCEI)2011 International Conference on Computer and Communication Devices (ICCCD) 2011 International Conference on Computer Applications and Network Security (ICCANS)2011 International Conference on Computers, Communications, Control and Automation (CCCA)2011 International Conference on Control, Robotics and Cybernetics (ICCRC)2011 International Conference on Data Engineering and Internet Technology (DEIT) 2011 International Conference on Database and Data Mining (ICDDM)2011 International Conference on Digital Convergence (ICDC)2011 International Conference on Economics and Finance Research (ICEFR)2011 International Conference on Economics, Business and Marketing Management (CEBMM)2011 International Conference on Economics, Trade and Development (ICETD) 2011 International Conference on Electrical Energy and Networks (ICEEN)2011 International Conference on Energy and Environment (ICEE)2011 International Conference on Engineering and Information Management (ICEIM) 2011 International Conference on Environment Science and Engineering (ICESE) 2011 International Conference on Environmental Science and Development (ICESD) 2011 International Conference on Future Environment and Energy (ICFEE 2011) 2011 International Conference on Fuzzy Systems and Neural Computing (FSNC) 2011 International Conference on Information and Computer Applications (ICICA) 2011 International Conference on Information and Computer Networks (ICICN) 2011 International Conference on Information and Industrial Electronics (ICIIE) 2011 International Conference on Information Engineering and Mechanical Engineering (IEME)2011 International Conference on Innovation and Information Management (ICIIM) 2011 International Conference on Intelligent Information Networks (ICIIN)2011 International Conference on Knowledge Discovery (ICKD)2011 International Conference on Life Science and Technology (ICLST)2011 International Conference on Manufacturing and Industrial Engineering (ICMIE) 2011 International Conference on Mechanical and Aerospace Engineering (ICMAE) 2011 International Conference on Medical Information and Bioengineering (ICMIB) 2011 International Conference on Network Communication and Computer (ICNCC) 2011 International Conference on Product Development and Renewable Energy Resources (ICPDRE)2011 International Conference on Security Science and Technology (ICSST)2011 International Conference on Social Science and Humanity (ICSSH)2011 International Conference on Solid-State and Integrated Circuit (ICSIC)2011 International Conference on System Design and Data Proceesing (ICSDDP) 2011 International Conference on System。
阿特斯面扫描设备联合分析低效片

1.000
Cell Voltage (volts)
0.03
0.4 0.100 0.3 0.2
Light Intensity Open-Circuit Voltage
0.025 0.02 0.015 0.01
0.009
0.010
0.1
0.005 0 0.00 0.000 0.70
0.001 0 0.00E+00 2.00E-03 4.00E-03 6.00E-03 8.00E-03 1.00E-02 1.20E-02 1.40E-02 1.60E-02 Time (sec)
4.77E+01 23-Aug-10
Illum ination at Reference Cell and Test Cell Voc 10.000 0.7 0.6
Light Intensity (Suns)
Pseudo Light IV curve w ithout the effect of Rs
3.39E+01 23-Aug-10
Illum ination at Reference Cell and Test Cell Voc 10.000 0.7 0.6 0.04 0.035
Pseudo Light IV curve w ithout the effect of Rs
0.019
Light Intensity (Suns)
测试分析
测试分析
Measure Cell
Sam ple Nam e low 1
Fit IV Curve
Fitted Rsh (W cm ² ) 1141 Pseudo Efficiency 16.427
Log to Summary
红警2单位中英对照
GAPOWR 盟军发电厂GAREFN 盟军矿厂GAPILE 盟军兵营GAWEAP 盟军兵工厂GAAIRC 盟军空军指挥部AMRADR 美国空军指挥部--AmericanParaDropSpecial GADEPT 盟军维修厂GAYARD 盟军船厂GATECH 盟军实验室GAROBO 控制中心---GAOREP 矿石精鍊器GAWALL 盟军围墙GAPILL 机枪碉堡---Vulcan2NASAM 爱国者飞弹--RedEye2GAGAP 裂缝产生器ATESLA 光棱塔----PrismShot / PrismSupport GASPYSAT 间谍卫星GAST 盟军建造场GTGCAN 法国巨炮GrandCannonWeapon GACSPH 超时空传送仪--- ChronoSphereSpecial GAWEAT 天气控制器--- LightningStormSpecial NAPOWR 磁能反应炉NAREFN 苏军矿厂NAHAND 苏军兵营NAWEAP 苏军兵工厂NARADR 苏军雷达--- SpyPlaneSpecialNADEPT 苏军维修厂NAYARD 苏军造船厂NATECH 苏军实验室NANRCT 核子反应堆--- NukePayloadNAINDP 工业工厂NAWALL 苏军围墙NABNKR 战斗碉堡NALASR 哨戒炮--VulcanNAFLAK 防空炮--FlakWeaponTESLA 磁暴线圈-- CoilBolt / OPCoilBoltNAST 苏军建造厂NAIRON 铁幕--- IronCurtainSpecialNAMISL 核弹发射井-- NukeSpecialYAPOWR 生化反应炉YAREFN 奴隶矿厂YABRCK 尤里兵营YAWEAP 尤里兵工厂NAPSIS 心灵感应器--- PsychicRevealSpecialYAYARD 尤里船厂YAGRND 部队回收厂YATECH 尤里实验室GAFWLL 尤里围墙NATBNK 坦克碉堡YAGGUN 盖特机炮YAPSYT 心灵控制塔----MultipleMindControlTowerNACLON 复制中心YAGNTC 基因突变器--- GeneticConverterSpecialYAPPET 心灵控制增幅器--- PsychicDominatorSpecialYAST 尤里建造场GASAND=沙墙CAAIRP=科技机场---ParaDropSpecialCAOILD=科技钻油厂--- ProduceCashStartup= ProduceCashAmount= ProduceCashDelay=CAHOSP=市民医院[RA2]CAMACH=科技机器商店CAOUTP=科技前哨站----HoverMissileCAPOWR=科技电厂CASLAB=秘密科技实验室CATHOSP=科技医院[YR]CATIME01=时间机器CATIME02=时间机器CALAB=爱因斯坦实验室GATE1=闸门CABUNK01-04 =燃料库CABHUT=桥梁维修小屋CAGARD01=警卫哨CAMIAM04=救生员休息亭CAUSFGL=美国国旗CACUFGL=古巴国旗CAFRFGL=法国国旗CAGEFGL=德国国旗CAIRFGL=伊拉克国旗CALBFGL=利比亚国旗CARUFGL=俄国国旗CAUKFGL=英国国旗CASKFGL=韩国国旗CALOND04=英国国会CALOND05=大笨钟CALOND06=伦敦塔CAMORR06=理克酒馆CAEGYP01=金字塔CAEGYP02=金字塔CAEGYP03=金字塔CASEAT01=西雅图太空针塔CASEAT02=巨软园区CASTL04=拱门CASYDN03=雪梨歌剧院CAEAST01=复活岛石像CAEAST02=尤里雕像----PrismShot CATRAN03=尤里要塞CAEGYP03=人面狮身像CALUNR01=登月小艇CAMIAM08=亚历桑那纪念馆CAPRS03=世界惊奇博物馆CACHIG04=芝加哥协会大楼CAEURO05=雕像CAFARM06=灯塔CAPARS01=艾菲尔铁塔CAPARS11=巴黎凯旋门CAWASH14=杰佛逊纪念馆CAWASH19=胜利纪念碑CAWASH15=林肯纪念馆CARUS03=克里姆林宫CAWASH01=白宫CATRAN01=地窖CAWASH19=胜利纪念碑CACOLO01=空军学院礼拜堂CARUS08 - 11 =球状戏院CAMISC06=V3 飞弹CAARMY01-04 =军队营帐CAFRMB =移动式厕所CATECH01 =通讯中心AMMOCRAT =弹药箱CAMISC01-02 =油桶中文名------------------注册名---------第一武器/ 第二武器终结者------------------ARND-----------TERMIGUN蓝波--------------------STLN-----------STALGUN / STALGREN快枪手------------------CLNT-----------CLINTGUN月球飞行兵-------------LUNR-----------Lunarlaser美国大兵----------------E1---M60 / Para /UCPara,UCElitePara盟军警犬----------------ADOG--GoodTeeth / VirtualScanner盟军工程师--------------ENGINEER--DefuseKit / VirtualScanner重装大兵----------------GGI------M60 / MissileLauncher火箭飞行兵--------------JUMPJET---20mm间谍--------------------SPY--MakeupKit海豹部队----------------GHOST -- MP5 / Sapper / C4=yes谭雅--------------------TANY--DoublePistols / Sapper超时空军团兵------------CLEG----NeutronRifle超时空突击队------------CAND[隐藏]--ChronoMP5 / FakeC4心灵突击队--------------PTROOP [YR][隐藏]--MindControl狙击手------------------SNIPE---AWP动员兵------------------E2====M1Carbine / UCM1Carbine,UCEliteM1Carbine苏军警犬----------------DOG--BadTeeth / VirtualScanner防空步兵----------------FLAKT -- FlakGuyGun / FlakGuyAAGun苏军工程师--------------SENGINEER--DefuseKit / VirtualScanner磁爆步兵----------------SHK -- ElectricBolt / AssaultBolt疯狂伊文----------------IVAN--IvanBomber特工--------------------SJJD--没有这个人鲍裏斯------------------BORIS--AKM / Flare超时空伊文--------------CIVAN[隐藏]--IvanBomber恐怖分子----------------TERROR--TerrorBomb辐射工兵----------------DESO--RadBeamWeapon / RadEruptionWeapon 尤里新兵----------------INIT--PsychicJab / UCPsychicJab,UCElitePsychicJab奴隶矿工----------------SLAV--SHOVEL尤里工程师--------------YENGINEER狂兽人------------------BRUTE--Punch / Smash病毒狙击手--------------VIRUS--Virusgun克隆尤里----------------YURI--MindControl / PsiWave超级尤里----------------YURIPR--SuperMindControl / SuperPsiWave 心灵突击队--------------YURIPT--[RA2]尤里改------------------YURIPP--[RA2]平民--------------------CIV1 黄衣服女-------CIV2 白衣服-------CIV3 技师-------CIVA 工人样-------CIVB 牛仔-------CIVC 黑衣蓝裤-------CIVBBP 棒球员-------CIVBFM 海滩胖男-------CIVBF 海滩女-------CIVBTM 海滩瘦男-------CIVSFM 老人-------CIVSF 红衣服女-------CIVSTM 黑衣服黄衣服将军---------------VLADIMIR绿衣服将军---------------PENTGEN苏联卫兵----------------CTECH-------WEEDGUY骆驼--------------------CAML =YR奶牛--------------------COW鄂鱼--------------------ALL --- AlligatorBite / VirtualScanner北极熊------------------POLARB --- BearBite / VirtualScanner暴龙------------------DNOA =YR腕龙--------------------DNOB =YR猴----------------------JOSH --- ChimpBite / VirtualScanner终级保镖----------------SSRV -- Pistola总统--------------------PRES洛马诺夫总理------------RMNV =YR爱因斯坦----------------EINS =YR木乃伊-----------------MUMY =YR-------------WWLF =YR灰熊坦克----------------MTNK--105mm多功能步兵车------------FV -----HoverMissile幻影坦克----------------MGTK----MirageGun光陵坦克----------------SREF----et/Superet战斗要塞----------------BFRT--20mmRapid盟军基地车--------------AMCV超时空矿车(倒矿)-------CMON **超时空矿车--------------CMIN机器人坦克--------------ROBO--Robogun坦克杀手----------------TNKD--SABOT榴弹炮--------------HOWI[隐藏,要修改ini]--HowitzerGun 恐怖机器人--------------DRON--DroneJump / VirtualScanner 防空车------------------HTK --FlakTrackGun / FlakTrackAAGun 犀牛坦克----------------HTNK--120mmV3火箭发射车------------V3 -- V3Launcher / V3ROCKET天启坦克----------------APOC 120mmx / MammothTusk苏军基地车--------------SMCV苏军矿车(倒矿)--------HORV **苏军矿车----------------HARV--20mmRapid磁爆坦克----------------TTNK --TankBolt自爆卡车----------------DTRUCK--Demobomb / none 狂风坦克----------------LTNK--ATGUN格林机炮坦克------------YTNK--AGGattling / AAGattling磁电坦克----------------TELE--MagneticBeam / MagneShake策划者------------------MIND--MultipleMindControlTank镭射幽浮----------------DISK--DiskLaser / DiskDrain神经突击车--------------CAOS--ChaosAttack / VirtualScanner尤里基地车--------------PCV---奴隶矿车----------------SMON--[卸矿]奴隶矿车----------------SMIN--20mmRapid汽车----------CAR 黄色------EUROC 黑色-------SUVB 包厢型-------STANG 跑车型-------SUVW 包厢型校车---------BUS野营车-------WINI小货车-------PICK 东风型-----PTRUCK 皮卡型卡车--------TRUCKA 自爆卡车型--------JEEP =YR卡车(载货)--TRUCKB 东风型豪华轿车-----LIMO计程车-------TAXI警车---------COP挖土机-------CONA宣传车-------PROPA巴士----------DDBX =YR黑色计程车-----BCAB =YR黄色计程车-----YCAB =YR摄影车---------DOLY =YR电车----------CBLC =YR救火车--------FTRK =YR救护车--------AMBU =YR盟军气垫艇--------------LCRF驱逐舰------------------DEST--155mm / ASWLauncher,ASW海豚--------------------DLPH--SonicZap神盾巡洋舰--------------AEGIS--Medusa航空母舰----------------CARRIER--HornetLauncher / HORNET 苏军气垫船--------------SAPC海蝎--------------------HYD--FlakTrackGun / FlakWeapon台风潜艇----------------SUB--SubTorpedo巨型乌贼----------------SQD--SquidGrab / SquidPunch无畏级战舰--------------DRED-- DredLauncher / DMISL尤里气垫船--------------YHVR雷鸣潜艇----------------BSUB --BoomerTorpedo / CruiseLauncher CMISL 海岸巡逻船--------------CDEST拖船--------------------TUG游船--------------------CRUISE尼米兹号航空母舰--------CARRIERB将军无畏级战舰----------DREDB维拉迪摩指挥舰----------VLAD============飞机类==============夜鹰直升机--------------SHAD--BlackHawkCannon入侵者战机--------------ORCA--Maverick舰载反潜机--------------ASW ** --ASWBomb大黄蜂------------------HORNET **--HornetBomb / HornetCollision 黑鹰战机----------------BEAG--Maverick2围攻直升机--------------SCHP -- BlackHawkCannon 160mm 基洛夫飞艇--------------ZEP--BlimpBomb米格战机----------------BPLN **--Maverick3间谍飞机----------------SPYP **--SpyCameraWeaponV3火箭------------------V3ROCKET **无畏级导弹--------------DMISL ··雷鸣导弹------------------ ------- CMISL **运输机-----------------PDPLANE鼠标动作(在原版里没用上的)PsychicReveal 心灵揭露NoForceShield 不能加载力场护盾无效ForceShield 力场护盾GeneticConverter 基因突变SpyPlane 侦察机PsychicDominator 心灵震荡AmerParaDrop 伞兵Demolish 红叉AttackMoveTar 移动攻击(CTRL+SHIFT)AttackMoveNav 移动攻击(CTRL+SHIFT)SelectBeacon 选取感叹号PlaceBeacon 放置感叹号AttackSupport 红叉SelectNode 正常指针DisarmBomb 拆弹DetonateAll C4Detonate C4NoIvanBomb 不能放置IVAN炸弹IvanBomb IVAN炸弹AreaAttack 部署PatrolWaypoint 红叉EnterWaypoint 红叉AttackWaypoint 红叉DragWaypoint 红叉LoopWaypointPath 红叉SelectWaypoint 红叉FollowWaypoint 红叉EnterWaypointMode 红叉TibSunBug 红叉PlaceWaypoint 红叉ParaDrop 伞兵ChronoWarp 时空传送选取目的地ChronoSphere 时空传送发动LightningStorm 闪电风暴IronCurtain 铁幕NoEnterTunnel 不能占领无效EnterTunnel 占领NoTogglePower 红叉NoGRepair 不能K维修NoEnter 不能进入NoDeploy 不能部署GRepair K维修Heal 医疗GuardArea 蓝盾(CTRL+ALT)Nuke 核弹Tote 红叉NoRepair 不能FV维修NoSell 不能变卖SellUnit 小绿变卖Sell 变卖ToggleSelect 悬停无效Select 悬停无效Self 部署NoMove 不能移动到目的地武器:105mm 105毫米口径0级灰熊坦克主武器105mmE 105毫米口径升级3级灰熊坦克主武器120HE 120HE120mm 120毫米口径0级犀牛坦克主武器120mmE 120毫米口径升级3级犀牛坦克主武器120mmx 120毫米口径X 0级天启坦克主武器120mmxE 120毫米口径X升级3级天启坦克主武器155mm 155毫米口径0级cdest主武器155mmE 155毫米口径升级3级cdest主武器20mm 20毫米口径0级火箭飞行兵主武器20mmE 20毫米口径升级3级火箭飞行兵主武器20mmRapid 20毫米口径快速20mmRapidE 20毫米口径快速升级75mm 75毫米口径90mm 90毫米口径轻坦克主武器AlliedOccupyW 盟军占领W 玛雅遗迹02主武器|建筑主武器AlligatorBite 鳄鱼咬鳄鱼主武器AssaultBolt 攻击线圈磁爆步兵辅武器AssaultCannon 攻击大炮ASWBomb ASW炸弹asw主武器ASWCollision ASW碰撞asw辅武器ASWLauncher ASW发射器cdest辅武器AWP 重狙0级狙击手主武器AWPE 重狙升级3级狙击手主武器BadTeeth 坏牙苏联军犬主武器BAZOOKA 火箭筒BearBite 熊咬北极熊主武器BikeMissile 摩托车导弹BlackHawkCannon 黑鹰机关炮雌鹿直升机主武器|0级夜鹰直升机主武器BlackHawkCannonE 黑鹰机关炮升级3级夜鹰直升机主武器BlimpBomb 飞艇炸弹0级基洛夫空艇主武器BlimpBombE 飞艇炸弹升级3级基洛夫空艇主武器Bomb 炸弹ChemLauncher 化学发射器ChimpBite 黑猩猩咬猴子主武器ChronoMP5 Chrono-MP5冲锋枪0级超时空突击队主武器ChronoMP5E Chrono-MP5冲锋枪升级3级超时空突击队主武器CoilBolt 线圈磁暴(Tesla=Coil)主武器et 棱镜坦克etFragment 棱镜坦克碎片CowShot 奶牛枪杀CRAWP CR-重狙CRBAZOOKA CR-火箭筒CRElectricBolt CR-导电磁爆CRFlakGuyGun CR-步兵高射炮CRM1Carbine CR-M1卡宾枪CRM60 CR-轻机枪CRMakeupKit CR-构造工具包CRMindControl CR-精神控制CRMP5 CR-MP5冲锋枪CRNeutronRifle CR-超时空步枪CRNuke CR-核多功能步兵车死亡武器CRRadBeamWeapon CR-RAD束武器CRTerrorBomb CR-恐怖炸弹CyCannon Cy大炮DefuseKit 拆炸弹工程师主武器Demobomb 卡车炸弹自爆卡车主武器|自爆卡车死亡武器DoublePistols 双手枪0级谭雅主武器DoublePistolsE 双手枪升级3级谭雅主武器Dragon 鳄鱼DredCollision Dred碰撞DredLauncher Dred发射器无畏级战舰主武器DroneJump 雄蜂跳跃恐怖机器人主武器EiffelBolt 艾菲尔磁爆艾菲尔铁塔主武器ElectricBolt 导电磁爆0级磁爆步兵主武器ElectricBoltE 导电磁爆升级3级磁爆步兵主武器ElectricFragment 导电碎片EMPulseWeapon EM脉冲武器FakeC4 假的C4 超时空突击队辅武器FiendShard 恶魔碎片FireballLauncher 火球发射器FlakGuyAAGun 加固高射炮0级防空步兵辅武器FlakGuyAAGunE 加固高射炮升级3级防空步兵辅武器FlakGuyGun 步兵高射炮0级防空步兵主武器FlakGuyGunE 步兵高射炮升级3级防空步兵主武器FlakTrackAAGun 轨道高射炮0级防空履带车辅武器FlakTrackAAGunE 轨道高射炮升级3级防空履带车辅武器FlakTrackGun 轨道枪0级海蝎主武器|0级防空履带车主武器FlakTrackGunE 轨道枪升级3级海蝎主武器|3级防空履带车主武器FlakWeapon 核武器0级海蝎辅武器|防空炮主武器FlakWeaponE 核武器升级3级海蝎辅武器GoodTeeth 好牙盟军军犬主武器GrandCannonWeapon 大火炮武器巨炮主武器Grenade 手榴弹HarpyClaw 悍妇爪Heal 治愈Hellfire 地狱之火HornetBomb 黄蜂炸弹0级大黄蜂主武器HornetBombE 黄蜂炸弹升级3级大黄蜂主武器HornetCollision 大黄蜂碰撞大黄蜂辅武器HornetLauncher 大黄蜂发射器航空母舰主武器HoverMissile 悬停导弹0级多功能步兵车主武器|科技前哨站主武器HoverMissile2 悬停导弹2HoverMissile2e 悬停导弹2升级HoverMissileE 悬停导弹升级3级多功能步兵车主武器HowitzerGun 榴弹炮榴弹炮主武器IvanBomber 伊文炸弹0级疯狂伊文主武器|超时空伊文主武器IvanBomberE 伊文炸弹升级3级疯狂伊文主武器JumpCannon 跳跃大炮LaserFire 激光枪LaserFire2 激光枪2LtRail 电网M1Carbine M1卡宾枪0级动员兵主武器M1CarbineE M1卡宾枪升级3级动员兵主武器M60 轻机枪0级美国大兵主武器M60E 轻机枪升级3级美国大兵主武器MakeupKit 构造工具包间谍主武器MammothTusk 巨大的长牙天启坦克辅武器Maverick 小牛0级入侵者战机主武器Maverick2 小牛2 0级黑鹰战机主武器Maverick2E 小牛2升级3级黑鹰战机主武器MaverickE 小牛升级3级入侵者战机主武器MayanPrism 玛雅棱镜玛雅金字塔主武器|墨西哥玛雅金字塔主武器MechRailgun 机械铁枪Medusa 水母0级宙斯盾战舰主武器MedusaE 水母升级3级宙斯盾战舰主武器MindControl 精神控制尤里主武器|0级伞兵主武器MindControlE 精神控制升级3级伞兵主武器Minigun 迷你枪MirageGun 幻影枪0-3级幻影坦克主武器MirageGunE 幻影枪升级3级幻影坦克辅武器MP5 MP5冲锋枪0级海豹部队主武器MP5E MP5冲锋枪升级3级海豹部队主武器NeutronRifle 超时空步枪0级超时空军团主武器NeutronRifleE 超时空步枪升级3级超时空军团主武器Nukebomb 核炸弹NukeCarrier 核媒介物Weedguy主武器NukePayload 核弹头OPCoilBolt 线圈磁爆(Tesla=Coil)辅武器OutpostMachineGun 前哨机枪Para 重机枪ParaDropWeapon 重机枪空投武器运输机主武器paraE 重机枪升级Pistola 皮斯托拉技师主武器|VLADIMIR主武器|PENTGEN主武器|Ssrv主武器PrismShot 棱镜不连光棱塔主武器PrismSupport 棱镜连光棱塔辅武器Proton 质子PsiWave 污染波尤里辅武器|尤里改辅武器QuadCannon 四倍火炮RadBeamWeapon 雷得束武器0级生化步兵主武器RadBeamWeaponE 雷得束武器升级3级生化步兵主武器RadEruptionWeapon 雷得喷发武器生化步兵辅武器RaiderCannon 入侵者机关炮RedEye2 红眼2 爱国者导弹主武器RepairBullet 修复子弹RPGTower 火箭塔SABOT 炮弹软壳0级坦克杀手主武器SABOTE 炮弹软壳升级3级坦克杀手主武器Sapper 挖掘器海豹部队辅武器|谭雅辅武器SlimeAttack 软泥攻击Sniper 狙击手SonicZap 声波摧毁0级海豚主武器SonicZapE 声波摧毁升级3级海豚主武器SovietOccupyW 苏联占领W 玛雅遗迹02辅武器|建筑辅武器SquidGrab 乌贼抓取0级乌贼主武器SquidGrabE 乌贼抓取升级3级乌贼主武器SquidPunch 乌贼推挤0级乌贼辅武器SquidPunchE 乌贼推挤升级3级乌贼辅武器SubTorpedo 潜水艇鱼雷0级飓风级战舰主武器SubTorpedoE 潜水艇鱼雷升级3级飓风级战舰主武器SuicideBomb 自杀炸弹Superet 超级棱镜坦克SuperetFragment 超级棱镜坦克碎片SuperMindControl 超级精神控制尤里改主武器TankBolt 坦克磁爆0级磁爆坦克主武器TankBoltE 坦克磁爆升级3级磁爆坦克主武器TankMakeupKit 坦克构造工具包TerrorBomb 恐怖炸弹恐怖分子主武器|恐怖分子死亡武器TeslaFragment 特斯拉碎片V3Airburst V3空气爆裂V3Cluster V3集群Weedguy辅武器V3Launcher V3发射器VirtualScanner 虚拟扫描恐怖机器人辅武器|工程师辅武器|苏联军犬辅武器|鳄鱼辅武器|盟军军犬辅武器|北极熊辅武器|猴子辅武器Vulcan 火焰哨戒炮主武器Vulcan2 火焰2 碉堡主武器Vulcan3 火焰3VulcanTower 火焰塔装甲:concrete--混凝土flak -- 防弹片heavy--重型light--轻型medium-- 中型none -- 无plate-- 金属板special_1 --特别_1special_2 -- 特别_2steel -- 钢铁wood -- 木头。
NVIDIA RTX A5000 专业级图形卡说明书
NVIDIA RTX A5000 PERFECTLY BALANCED. BLAZING PERFORMANCE.Amplified Performance for ProfessionalsThe NVIDIA RTX™ A5000 delivers the power, performance, capabilities, and reliability professionals need to bring their boldest ideas to life. Built on the NVIDIA Ampere architecture, the RTX A5000 combines 64 second-generation RT Cores, 256 third-generation Tensor Cores, and 8,192 CUDA® cores with 24 GB of graphics memory to supercharge rendering, AI, graphics, and compute tasks. Connect two RTX A5000s with NVIDIA NVLink1 to scale memory and performance with multi-GPU configurations2, allowing professionals to work with memory intensive tasks such as large models, ultra-high resolution rendering, and complex compute workloads. Support for NVIDIA virtual GPU software increases the versatility for enterprise deployments.NVIDIA RTX professional graphics cards are certified with a broad range of professional applications, tested by leading independent software vendors (ISVs) and workstation manufacturers, and backed by a global team of support specialists. Get the peace of mind needed to focus on what matters with the premier visual computing solution for mission-critical business.SPECIFICATIONSPNY Part Number Retail: VCNRTXA5000-PBSingle Bulk: VCNRTXA5000-SBEducation: VCNRTXA5000-EDUBulk: VCNRTXA5000-BLKGPU memory24 GB GDDR6Memory interface384-bitMemory bandwidth768 GB/sError-correcting code (ECC)YesNVIDIA Ampere architecture-based CUDA Cores8,192NVIDIA third-generationTensor Cores256NVIDIA second-generationRT Cores64Single-precision performance27.8 TFLOPS5RT Core performance54.2 TFLOPS5Tensor performance222.2 TFLOPS6NVIDIA NVLink Low profile bridges connect twoNVIDIA RTX A5000 GPUs1NVIDIA NVLink bandwidth112.5 GB/s (bidirectional)System interface PCI Express 4.0 x16Power consumption Total board power: 230 W Thermal solution ActiveForm factor 4.4” H x 10.5” L,dual slot, full heightDisplay connectors4x DisplayPort 1.4a7Max simultaneous displays4x 4096 x 2160 @ 120 Hz,4x 5120 x 2880 @ 60 Hz,2x 7680 x 4320 @ 60 HzPower connector1x 8-pin PCIeEncode/decode engines1x encode, 2x decode (+AV1 decode) VR ready YesvGPU software support7NVIDIA vPC/vApps, NVIDIA RTXVirtual WorkstationvGPU profiles supported See the Virtual GPU Licensing Guide Graphics APIs DirectX 12 Ultimate, Shader Model6.6, OpenGL 4.689, Vulkan 1.38 Compute APIs CUDA 11.6, DirectCompute,OpenCL 3.0Features>PCI Express Gen 4>Four DisplayPort 1.4a connectors >AV1 decode support>DisplayPort with audio>3D stereo support with stereo connector>NVIDIA GPUDirect® for Video support >NVIDIA virtual GPU (vGPU) softwaresupport>NVIDIA Quadro® Sync II3 compatibility>NVIDIA RTX Experience™>NVIDIA RTX Desktop Manager software>NVIDIA RTX IO support>HDCP 2.2 support>NVIDIA Mosaic4 technologyNVIDIA RTX A5000 | DATASHEET | APR21To learn more about the NVIDIA RTX A5000, visit /nvidia-rtx-a50001 NVIDIA NVLink sold separately. |2 Connecting two RTX A5000 cards with NVLink to scale performance and memory capacity to 48GB is only possible if your application supports NVLink technology. Please contact your application provider to confirm their support for NVLink. |3 Quadro Sync II card sold separately. |4 Windows 10 and Linux. |5 Peak rates based on GPU Boost Clock. |6 Effective teraFLOPS (TFLOPS) using the new sparsity feature. |7 Display ports are on by default for RTX A5000. Display ports are not active when using vGPU software. |8 GPU supports DX 12.0 API, hardware feature level 12 + 1. |9 Product is based on a published Khronos specification and is expected to pass the Khronos conformance testing process when available. Current conformance status can be found at /conformance© 2021 NVIDIA Corporation. All rights reserved. NVIDIA, the NVIDIA logo, CUDA, GPUDirect, NVLink, Quadro, RTX Experience, and RTX are trademarks and/or registered trademarks of NVIDIA Corporation in the U.S. and other countries. Other company and product names may be trademarks of the respective companies with which they are associated. All other trademarks are property of their respective owners.。
军用型号项目软件复用成本度量模型
军用型号项目软件复用成本度量模型张圆圆1,刘琪2,王颖1【摘要】针对军用型号项目软件研制过程中普遍存在的软件复用行为,提出了一种复用成本度量方法,对传统的COCOMO2.0成本度量模型进行了改进,采用改进的功能点法估计软件实际规模,适当调整模型中的评估项,增加了度量系统复用的成本驱动因子及系统通用特性统计项(GSC),建立了相应的量化评估及DI分级表,形成了军用型号项目软件进度、成本估计模型,使用改进的度量模型对某军用型号项目进行了成本度量,验证了方法的有效性。
【期刊名称】计算机工程与应用【年(卷),期】2015(000)005【总页数】6【关键词】COCOMO2.0;复用度量;军用型号项目1 引言近年来,我军武器装备更新步伐不断加快,对军工装备研制需求不断增长。
军工科研项目是普遍按照产品型号及系列进行研发的大型复杂系统工程[1],具有安全可靠性高、投资规模巨大、建设周期长等特点[2]。
软件研发是军工项目研制的一部分,随着计算机技术越来越广泛地应用于武器装备,军用软件在规模和功能重要性上均呈急剧上升趋势,软件研发已成为军工型号项目研制的关键[3]。
“软件活动是可控、可度量和可改进的过程”(Watts Humphrey),为了提高软件质量、控制进度,军用软件开发组织必须在项目过程中持续度量,持续跟踪,持续改进,不断提高软件项目管理水平。
目前,各武器装备型号都积累了一大批成熟的软件产品,型号项目的系列化研制方式,使得软件产品的重用也越来越普遍[4],对存在复用的型号项目软件进行有效、准确的软件规模/成本估计(Software Measurement),是软件研制过程中进行任务、资源分配,以及进度安排等项目策划(Project Plan)活动的重要前提和基础。
软件复用开发与传统的软件开发方式不同,导致了新的软件复用度量方法及度量模型的需求[5],本文根据军用型号项目软件研制特点,分析了软件开发过程中的复用行为对成本度量结果的影响,并结合项目实施的实际过程及经验数据,对COCOMO2.0(Constructive Cost Model,建设成本分析模型)进行了改进,形成了适用于军用型号项目的改进型软件复用进度/成本估计模型。
第18届智利航空航天展上的轻武器

第18届智利航空航天展上的轻武器作者:张宏光来源:《轻兵器》 2015年第9期在土耳其KB仪表制造公司展台上不仅展示了防空武器,还有反坦克导弹和榴弹武器张宏光智利航空航天展(FIDAE)是拉丁美洲规模最大的武器、军事与航空航天技术展览会,主要展出军/民用运输机、直升机、无人机以及运载火箭技术、发射服务技术、航空配件等,另外,作为广泛使用的轻武器,在航展上也有一席之地。
到目前为止,历届FIDAE一直是在近智利首都圣地亚哥的奥特罗·梅利诺·比利兹(Arturo Merino Benitez)国际机场举办。
近年,FIDAE的国际影响越来越大,很多世界著名的研制和生产厂商踊跃参加展览。
在第18届展会上,有35个国家的370家厂商参展,其中包括美国的77家公司、俄罗斯的14家公司及巴西的37家公司。
本文则聚焦本次展会上的轻型武器——土耳其Tisas公司ZIG P 06紧凑型手枪土耳其Tisas公司的ZIG P 06紧凑型半自动手枪发射9×19mm巴拉贝鲁姆手枪弹,套筒座材料为聚合物,套筒座前方下部设有皮卡汀尼导轨,握把前后左右侧面均制有防滑纹,套筒后部左右两侧制有斜槽状防滑纹,方便前后拉动套筒。
准星为片状,不可调;照门为觇孔式,可左右调整。
空仓挂机及手动保险均设在枪身左侧,空仓挂机在前,手动保险在后。
将手动保险扳至上方为保险状态,扳至下方为射击状态。
该枪弹匣容弹量14发,全枪质量(不含弹匣)0.6kg。
智利FAMAE公司紧凑型SAF迷你冲锋枪FAMAE是智利一家国营轻武器工厂,其推出了图中的紧凑型SAF迷你冲锋枪,该枪采用模块化设计,可安装固定式聚合物枪托或可折叠式金属枪托。
该枪虽然体积小,但战术附件却并不少,如机匣顶部设有皮卡汀尼导轨,可安装小型的瞄准镜,其瞄准镜位置较高;下护手与前握把采用一体式设计,当然,如果不需要前握把,也可换装专门的下护手。
其发射9×19mm巴拉贝鲁姆手枪弹,射速1 200发/分,全枪长525mm(处于战斗状态,带枪托时),枪托折叠时全枪长320mm,空枪质量2.3kg,弹匣容弹量20发或30发。
coc武器列表

说明:db:伤害加权,具体数值因人而异。
勒颈:关于这种可能性,请参照“擒抱”技能的规则。
晕眩:在1轮、1d6轮或由守秘人指定的时间内,除了招架什么都做不了。
而且,必须通过一个[意志值×莫兰上校的气动步枪:靠压缩空气发射,不需要火药,因而比较安静。
[译注:典出自福尔摩斯的故事] 1/2、1/3:只有2轮或3轮攻击一次,才能做到准确攻击。
1或2:在同一轮中,可以选择只用一边、还是同时用两边的枪管射击。
①:这种武器、或武器类型可以造成贯穿。
②:本武器的伤害加权算上了马的冲击力。
③:采用“溺毙、窒息”的规则。
④:本枪械是重型加特林机关枪,一般装备在直升机上。
若想用手持的方式射击,则至少需具备16点力⑤:轻型反坦克武器,一次性使用。
☆:本武器不适用于“近距离平射”的规则。
★:本武器若造成贯穿,便可任意截下对手的一条肢体。
连射:民间不可能搞到能连射的枪械。
在这里给出的价格都是黑市价。
NA:平民禁止购买任何自动武器,即使拥有也是违法行为。
但有可能获得把合法武器改装成自动武器的故障值:如果一次火器发射的检定结果大于等于该武器的故障值,不仅攻击不会命中,子弹也会成为哑 但如果拿的是带杠杆式枪机的步枪,枪就会卡壳,射手必须用1d6个战斗轮的时间投“机器维修 而且,如果在检定时投出了96~00,枪就会被彻底弄坏。
直到枪被修好、或者被彻底弄坏为止散弹枪子弹的口径规格:10号为[1d10+8]、12号为[1d10+6]、16号为[1d10+5]、20号为[1d10+4];基本射稀有:可能指已经属于古董的武器、也可能指专供收藏用的精致武器,亦有可能指违法的武器。
各时代价格:现代的价格指收藏品市场上的价格,1920年代的价格指市价。
单位一律为美元。
2码、3码等等:在伤害栏中所示的这个距离,指爆炸后的杀伤半径。
在爆炸范围之外,每远离一段相当阔剑地雷:这种武器的弹道是密集的射束流,其杀伤范围为120度。
附加说明(1):标红色的武器未收录于规则书上,是我自己加的,数值也是我自己估算的,供有爱者使用附加说明(2):标蓝色的武器出自日本Arclight公司出版的扩展规则《克苏鲁与帝国》,供有爱者使用。
2010年美国陆军十大发明

2010年美国陆军十大发明美国陆军2010年度十大发明在9月12日揭晓。
这是由具有实战经验的士官和陆军训练与条令司令部的军官联合组成的评比委员会选出来的,获奖的有M992 型40毫米红外照明枪榴弹、M885A1式5.56毫米增强性能步枪弹、“绿眼”强光致盲系统、“胡狼”扫雷车、M240L轻重量中型机枪、便携式迫击炮火控系统、“赫斯基犬”Mk3探雷车、mCare计划、RG-31机器人部署系统以及单兵可穿戴式综合电源装备系统(简称SWIPES)。
颁奖仪式将在2011年10月10到12日期间在华盛顿举办的陆军年会上进行,美国陆军装备司令部司令安邓伍迪将军将出席颁奖。
有意思的是,在陆军各主要兵种中,2010年的十大发明大多集中在和步兵有关的项目,工兵项目也集中在反IED装备,传统的装甲兵、炮兵、航空兵基本没有涉及,就连十分热门的网络战和通信也没有入围。
这自然和十年反恐战争有直接联系,但也和美国陆军的艰难转型分不开。
美国陆军实际上是“反恐”起家的。
当年从星散的小块殖民地开疆拓土的时候,印第安人就是必欲消灭的“恐怖分子”,喀斯特将军的名言“只有死了的印第安人才是好印第安人”就是这个时代的写照。
后来争夺南方的时候,潘兴将军追缴的也是墨西哥“恐怖分子”。
但美国陆军的成长壮大开始于两次世界大战,尤其在二战后,驻欧美军成为西欧安全的镇海神针。
但是时过境迁,重装甲为主的陆军重兵集团在冷战后很是茫然,而十年反恐战争凸现了空中火力支援下精锐步兵分队的作用,美国陆军开始了很不情愿的艰难转型,但一直眷恋于重装甲在高烈度战争中的作用,把反恐和低烈度战争看作大战之间的副业,直到前国防部长盖茨在2010 年2月25日西点军校的毕业典礼上,明确指出美国陆军必须放弃大陆军的幻想。
这对陆军武器研究、发展与工程中心是好消息,这是美军轻武器和弹药研发的中心,著名的皮卡丁尼导轨就是这里发明的。
2002年以来,陆军十大发明奖全部90个获奖项目中有30个来自皮卡丁尼,2009年只有3个,但2010年一举夺下6个,这是皮卡丁尼的最高纪录。
Eaton Aerospace产品说明书

Manual (ATA Number)CurrentRevisionRevisionDateEaton PartNumberDescription OEM Application63-41-10Rev 1Mar 31/981H118-45QDM Signal Conditioner Agusta Westland EH10163-41-20Initial Feb 15/02S247-4Sight Gauge Agusta AB13979-22-06Rev 2Jul 30/991A475Chip Collector GE CF679-24-01Reissue Apr 15/94A693Full Flow Debris Monitor Textron Lycoming ALF502/ LF507 79-22-06Rev 2Jul 30/991A1869Chip Collector GE CF679-24-01Reissue Apr 15/941D1934Full Flow Debris Monitor Textron Lycoming ALF502/ LF507 79-24-01Reissue Apr 15/941D2316Full Flow Debris Monitor Textron Lycoming ALF502/ LF507 79-22-11Initial Feb 1/941J2496Power Module Israel Cobra79-23-00Initial Feb 28/941F2870-3Lubriclone Allison AE210079-21-39Rev 2Sep 30/991F2976SeriesDMS Separator Hispano-Suiza GE9079-21-38Rev 1Aug 31/991G2977SeriesDMS Sensor Hispano-Suiza GE9079-21-41Rev 1Apr 30/991H2983-3DMS Conditioner Hispano-Suiza GE9049-90-30Initial Jan 18/082E3249Level Sensor Honeywell36-150 APU79-21-03Rev 1May 24/96VB3447Chip Detector Rolls-Royce RB21179-21-04Rev 1May 10/96VA3503Chip Detector Rolls-Royce RB21179-21-05Rev 2Feb 15/01VA3508Chip Detector Rolls-Royce BR710, TRENT700/80079-22-45Rev 3Nov 1/99VB3521-2Chip Detector Rolls-Royce V250079-22-06Rev 2Jul 30/99B4354-1Chip Detector GE CF679-22-08Rev 1Mar 31/99B4901Chip Detector w/Self-ClosingValve Pratt & Whitney PW2000F117PW-10079-22-14Rev 1May 9/08B4902Chip Detector w/Self-ClosingValvePratt & Whitney PW400079-22-14Rev 1May 9/08B4903Chip Detector w/Self-ClosingValvePratt & Whitney PW400079-23-00Initial Feb 28/942Z6468Self-Closing Valve Allison AE2100 79-22-02Rev 2Nov 19/991A6473Chip Detector w/Self-ClosingValvePratt & Whitney PW4000 79-22-03Initial Jul 15/931B6488Chip Detector w/ Self-ClosingValvePratt & Whitney PW400079-22-02Rev 2Nov 19/991A6505Chip Detector w/Self-ClosingValvePratt & Whitney PW4000 79-21-51Rev 2Nov 17/061D6549Debris Monitor Hispano-Suiza CFM56 79-21-52Rev 1Oct 20/001B6550Chip Detector Hispano-Suiza CFM56 79-31-10Rev 2May 9/944J6588Electric Chip Detector GE LM6000 79-22-04Initial Oct 15/921A6618Chip Collector w/Self-ClosingValveGarrett APU79-22-10Initial Dec 15/971A6794Chip Collector w/Self-ClosingValveIAE V250079-23-00Initial Feb 28/941B6820Chip Detector Allison AE2100 79-23-05Initial Jun 1/981F6875Lubriclone Rolls-Royce AE1107C 79-22-07Initial Mar 15/951A6902Chip Collector w/Self-ClosingValvePratt & Whitney JT9D79-22-07Initial Mar 15/951A6925Chip Collector w/Self-ClosingValvePratt & Whitney JT9D79-22-09Rev 2Jan 3/001A6945Chip Collector w/Self-ClosingValvePratt & Whitney JT8D79-22-09Rev 2Jan 3/001A6947Chip Collector w/Self-ClosingValvePratt & Whitney JT8D79-22-09Rev 2Jan 3/001A6948Chip Collector w/Self-ClosingValvePratt & Whitney JT8D79-22-12Initial Sep 15/961A7091Chip Collector w/Self-ClosingValvePratt & Whitney JT9D79-22-16Initial Dec 15/971A7476Chip Collector w/Self-ClosingValveRolls-Royce BR715Manual (ATA Number)CurrentRevisionRevisionDateEaton PartNumberDescription OEM Application77-42-03Initial Jan 03/001J7589Smart Zapper Power Module Westland Seaking77-42-04Initial Jan 03/001Z7628Smart Zapper Maint. Panel Westland Seaking79-22-16Initial Dec 15/971A7802Chip Collector w/Self-ClosingValveRolls-Royce BR71579-22-46Rev 1Jan 29/041B7802Chip Detector Rolls-Royce TRENT 500/900 79-22-47Initial Dec 29/062Z7802DMS Inhibitor Rolls-Royce TRENT 500/900 63-41-20Initial Feb 15/021D7829Debris Monitor Agusta AB13963-41-20Initial Feb 15/021B7830Chip Detector w/Adapter Agusta AB13963-41-20Initial Feb 15/022A7831Oil Filler Agusta AB13963-41-20Initial Feb 15/021B7839Chip Detector w/SCV Agusta AB13963-41-20Initial Feb 15/022A7840-1Oil Filler Agusta AB13963-41-20Initial Feb 15/022B7841Vented Breather Agusta AB13963-41-21Initial Feb 15/021J7895Power Module Agusta AB13979-11-24Initial Apr 14/041F8550DMS Separator Hispano-Suiza GE90-115B63-41-20Initial Feb 15/022F8566E/O Sensor Agusta AB13979-36-13Initial Jun 30/061F8664-4ODM Separator GE GP7200。
飞机涂装和识别

飞机涂装和识别菲亚特CR.32 箭战斗机CR.32quater AS 意大利空军第50攻击联队12大队160中队CR.32 国民党空军CR.32 奥地利空军CR.32 德国接收原奥地利CR.32 匈牙利空军第一气象大队山狮中队CR.32 巴拉圭空军CR.32 委内瑞拉空军亨舍尔Hs-123 攻击机Hs-123A 秃鹰军团Hs-123A-1 纳粹空军波利卡尔波夫I-15 战斗机I-153 苏联空军1941 明斯克I-153 芬兰空军1942I-153 国民党空军PZL P-37 麋鹿战斗机P-37bis 罗马尼亚空军容克斯Ju-87 俯冲轰炸机Ju-87B-1 纳粹空军Stab/LG1 波兰1939Ju-87B-1 Ⅶ./JG51 法国1940Ju-87B-2 纳粹空军Stab/JG1 东部战线1941Ju-87B-2 意大利空军209A 非洲Squadriglia 1941Ju-87B-2 纳粹空军Ⅲ/StG2 不列颠1942Ju-87B-2 纳粹空军Ⅲ./StG3 利比亚昔兰尼加1942Ju-87D-1/Trop 纳粹空军StG3 Obstlt Walter Siegel Geschwaderkommodre Dema 1942Ju-87D-3 纳粹空军Ⅸ./StG77 东部战线1943Ju-87G-1 纳粹空军Versuchskommando fur Panzerbekampfung 1943Ju-87R 纳粹空军Ⅶ/StG77 Balcans 1941Ju-87R-2 纳粹空军利比亚1941海因克尔He-112 战斗机He-112V-6 秃鹰军团He-112V-9 纳粹空军He-112B 西班牙空军He-112B 匈牙利空军He-112B 罗马尼亚空军梅塞施密特Bf-109战斗机Bf-109B 秃鹰军团1939 西班牙内战Bf-109B 纳粹空军杜尔塞多夫德国1938Bf—109E-3 纳粹空军Ⅱ/JG77 1939Bf—109E-3 纳粹空军Ⅱ/JG77 1940Bf—109E-4 纳粹空军Ⅱ/JG77 1941Bf-109E-1 纳粹空军Ⅶ./JG52 巴尔干半岛1941Bf-109E-3 纳粹空军Ⅵ./JG51 约瑟夫.波尔勒1940秋Bf-109E-4 纳粹空军JG2 Helmut Wick 1940Bf-109E-4 纳粹空军3./JG1 De Koy 1941初Bf-109E-4 纳粹空军JG-2 Helmut Wick 1940.11 Bf-109E-4 纳粹空军2./JG52 1940Bf-109E-4 纳粹空军II./JG27 Wolfgang LIppert 1940Bf—109F-2 纳粹空军Ⅲ/JG27 1942 Bf-109F-4 纳粹空军Ⅹ.JG26 1942.4Bf-109G-2 纳粹空军Bf—109G-6 纳粹空军Ⅸ. /]G52 哈特曼1943Bf—109G-10/U4 匈牙利空军1945Bf-109T-2 纳粹空军梅塞施密特Bf—110 战斗机Bf—110G-4b/R-3 纳粹空军Ⅲ/NG4 1944布鲁斯特F2A 水牛舰载战斗机F2A-2 美国空军“列克星敦”号航母VF-2 1941F2A-3 美国海军陆战队1942菲亚特CR.25 战斗机原型机都柏林机场三菱重工A6M 零战斗机A6M2-11 日本空军海军第12航空队中国1941.5A6M2-22 日本空军布干维尔岛瑞鹤号A6M3-32 日本空军第2航空队腊包尔1942拉沃契金LaGG-3 战斗机LaGG-3 苏联空军1942 列宁格勒LaGG-3 苏联空军LaGG-33 66型苏联空军雅克福列夫I-26 战斗机I-26原型机雅克福列夫yak-1 战斗机yak-1第二批次苏联空军Lilya Litvak 座机Yak-1第二批次苏联空军叛逃德国Yak-1 苏联空军雅克福列夫Yak-7 战斗机Yak-7A苏联空军1942 加里宁前线Yak-7B 苏联空军1942夏Yak-7B苏联空军列宁格勒前线1943Yak-7B 苏联空军第159战斗航空团指挥官P.PokryshevYak-7V 苏联空军波兰第一战斗航空团1943冬雅克福列夫Yak-9 战斗机Yak-9初期型苏联空军第976战斗航空团1943.3Yak-9 苏联空军贝尔P-39飞蛇战斗机苏联空军格里戈里·列奇卡洛夫座机寇蒂斯P-40 小鹰战斗机P-40C 飞虎队Tomahawk座机P-40F 法国自由空军P-40 飞虎队格里高利·波音顿中岛二式钟馗单战日本空军Ki-44 1942拉沃契金La-5 战斗机La-5 苏联空军伊留申IL-2 攻击机IL-2 苏联空军IL-2M 苏联空军IL-2M3 苏联空军拉沃契金La-7战斗机La-5 苏联空军伊留申IL-10 攻击机IL-10 朝鲜空军钱斯·沃特F4U 海盗舰载战斗机美国空军F4U黑羊中队格里高利·波音顿美国空军F4U VF-17作战官罗杰·赫德里克美国空军F4U VMF-215 罗伯特·汉森美国空军F4U VMF-124 霍华德·芬法国空军F4U-7 1956 苏伊士行动美国空军F4U VMF-213 托马斯康维尔·史汀生L-5 步哨联络机L-5 中国空军诺斯罗普·格鲁曼F6F 恶妇舰载战斗机美国空军F6F-3 VF-4 阿拉米达海军航空站1943.5 美国空军F6F-3N “索罗门斯”号航母1944.11美国空军F6F-5 VFN-90英国皇家空军恶妇MK.Ⅰ“君主”号航母804中队共和P-47 雷电战斗机P-47 美国空军56战斗机联队1942 英国P-47D-10 美国空军325战斗机联队1943P-47C-2 美国空军56战斗机联队1943 英国P-47D-22-RE 美国空军56战斗机联队1944 英国北美P-51 野马战斗机P-51D中国空军战斗飞行大队2中队中岛四式疾风单战美国空军Ki-84 战后缴获霍克暴风战斗机英国皇家空军暴风Mk.Ⅴ靶标拖曳机福克·沃尔夫Ta-152 战斗机Ta-152H-1 纳粹空军Stab/JG301 Josef Keil 1945 Ta-152H-1 纳粹空军Stab/JG301 willi Reschke 1945梅塞施密特Me-262 战斗机Me-262A-1a 纳粹空军第262试飞队Me-262A-1a 纳粹空军Walther NowotnyMe-262A-1a 纳粹空军Me-262A-1a 纳粹空军第51轰炸航空团第1大队Me-262A-1a 纳粹空军第44喷气战斗机联队Me-262A-1a 纳粹空军第2补充战斗航空团第3大队Me-262A-1a 纳粹空军第54轰炸航空团第3大队阿拉多Ar-234 闪电轰炸机Ar-234B-2/N夜间战斗机纳粹空军雅克福列夫Yak-17 战斗机Yak-17 苏联空军北美F-86 佩刀战斗机F-86E-6CAN 美国空军FU-852雅科夫列夫Yak-36 自由画垂直起降战斗机Yak-36 苏联空军米高扬-格列维奇MiG-21 鱼窝战斗机MiG-21PF 苏联空军前线航空师1964MiG-21FL 印度空军红色射手特技飞行队1970MiG-21bis 印度空军印巴战争1971MiG-21PF 印度空军印巴战争1971MiG-21MF 苏联空军基辅军区1973MiG-21MF 捷克斯洛伐克空军第7航空军1974MIG-21MF 东德空军第1空军防卫师第8大队1975 北美F-107 战斗轰炸机YF-107A 美国空军北美A-5 民团团员攻击机RA-5C 美国空军越南战争1971RA-5C 美国空军越南空军1970RA-5C 美国空军越南战争1967BAE 闪电战斗机闪电F.1A 英国皇家空军第56中队闪电F.1A 英国皇家空军第74中队麦克唐纳·道格拉斯F-4 鬼怪战斗机F-4D 伊朗伊斯兰共和国空军F-4E 土耳其空军112中队1998F-4F 德国空军JG-71 Rithchofen联队40周年纪念F-4J 美国空军“美国”号航母VFMA-33 Thomas Lasseter少校和John mings少尉1972 米高扬-格列维奇MiG-23 鞭笞者战斗机MiG-23I 苏联空军多摩多多瓦航空展1967MiG-23MF-B 匈牙利空军MiG-23MF-B 东德空军JG-9联队MiG-23ML-B早期型苏联空军1978MiG-23MLD-K 苏联空军越南金兰湾MiG-23-D 苏联空军前线航空团MiG-23BN-H 印度空军第10中队MIG-23BN-H 捷克空军布达佩斯图波列夫Tu-22眼罩轰炸机Tu-22B 利比亚空军雅科夫列夫Yak-38 铁匠垂直起降战斗机Yak-38 苏联空军米高扬-格列维奇MiG-25 狐蝠战斗机MiG-25P 苏联空军别列科远东丘谷耶夫卡基地1976MiG-25PD 乌克兰空军MiG-25PD 利比亚空军MiG-25PU 苏联空军Boris Safonov号1996MiG-25RB 阿拉伯联合酋长国第63独立空中特遣部队1972MiG-25RB 保加利亚空军MiG-25RBF 苏联空军萨塔洛夫空军基地MiG-25RU 印度空军诺斯罗普·格鲁曼F-14 雄猫战斗机F-14A 美国空军VF-114“土豚”中队密拉马航空站/“小鹰”号航母F-14A 美国空军VF-134“Pukin Dogs”密拉马航空站/“美国”号航母F-14A 美国空军VF-14 “顶帽”欧新尼亚航空站/“肯尼迪”号航母苏霍伊Su-25 蛙足攻击机Su-25T-8 预生产型苏联空军Su-25 苏联空军第375战斗轰炸机团Su-25K 伊拉克空军两伊战争Su-25K 捷克空军1992Su-25 苏联空军Su-25TM 苏联空军原型机Su-25UTG 原型机Su-25UB 苏联空军Su-25UBK 保加利亚空军达索幻影战斗机幻影2000N 法国空军波音F—15 鹰战斗机F-15A Eagle 美国空军73—106 路克空军基地F-15A Eagle 美国空军73—103 路克空军基地F-15A Eagle 美国空军75—042 内利斯空军基地F-15A Eagle 美国空军75—064 德国彼得格伯苏霍伊Su—27 侧卫战斗机Su—27 俄罗斯国土防空军941联队红色39Su—27 俄罗斯空海军第9联队红色39 2001Su—27 俄罗斯空军第9联队蓝色41 亚历山大·切斯洛夫号。
IWB2010珍藏枪展示(Ⅱ)

IWB2010珍藏枪展示(Ⅱ)作者:何文龙来源:《轻兵器》 2010年第19期欧洲制7mm口径边针发火弹胡椒盒手枪边针发火弹是早期的一种定装枪弹,其特点是弹壳底部侧面带有一个击针。
由于这种枪弹与后来的边缘发火式枪弹及中心发火式枪弹相比,使用起来非常不便,因此在欧洲使用的时间很短,相应地,使用边针发火弹的手枪的生产也只持续了相当短的时间。
其中使用边针发火弹的胡椒盒手枪(枪管与弹膛呈一体式设计,因外形像胡椒盒而得名)生产数量更是极少,如今颇显珍贵。
图为使用7mm口径边针发火弹的胡椒盒手枪。
意大利伍贝尔德公司缩小型柯尔特转轮手枪意大利伍贝尔德公司在复制全尺寸老款枪械的同时,也推出其缩小型。
图示的这种缩小型柯尔特转轮手枪是伍贝尔德公司已退休的高级技工设计制作的,由于这些技术工人的年龄越来越大,现在已基本不再制作生产,因而收藏价值也就水涨船高。
美国莱依德公司弗兰德·纳克尔德斯塔No.2转轮手枪图示的弗兰德·纳克尔德斯塔No.2转轮手枪是由位于美国纽约州的莱依德公司制造的小型转轮手枪。
该枪外形非常小巧独特,没有枪管,转轮弹膛的前半部分作为枪管使用。
该枪采用击锤外露式单动发射机构,结构简单。
另外,该枪还有一个特点,即如果握住转轮弹膛部分,可以利用握把直接击打目标。
从这点可以判断,该枪当时主要是在治安并不完善的新建城市中使用。
比利时造史密斯-韦森No.3俄版转轮手枪沙皇俄国于1870年选用美国史密斯-韦森公司的No.3俄版转轮手枪为制式手枪。
由于史密斯-韦森公司的生产远不能满足俄国军队的需求,为此德国的路德韦克·罗拜公司也进行特许生产,即使这样仍不能满足需求,后来,比利时和西班牙也为沙皇俄国生产该枪。
但是比利时和西班牙并未从史密斯-韦森公司得到特许,属盗版生产。
图为比利时生产的史密斯-韦森No.3俄版转轮手枪。
浮士德握持式手枪图示的浮士德握持式手枪是最古老的火绳枪之一,是德国在14世纪左右生产的。
新品轻武器及附件呈送

新品轻武器及附件呈送作者:郭萍来源:《轻兵器》 2014年第17期郭萍LCR-X紧凑型转轮手枪是斯图姆-鲁格公司LCR系列转轮手枪的最新一款,于2014年推出。
其外形小巧,采用外露击锤,改变了LCR以往内置击锤的设计。
击锤较小,呈银色。
黑色握把由聚合物材料制成,前方设有指槽。
转轮座由钢制成,表面采用黑色处理,转轮弹膛、击锤、扳机由不锈钢制成,呈银色,故全枪外观呈现黑色、银色两种颜色。
该枪发射0.38英寸特种弹,转轮弹膛容弹量为5发,全枪长165mm,空枪质量为0.38kg。
其售价为529美元。
斯洛文尼亚共和国Arex d.o.o公司REX zero 1半自动手枪斯洛文尼亚共和国的Arex d.o.o公司于1994年成立,历史并不是很长。
该公司生产的REX zero 1半自动手枪吸取了西格手枪和CZ手枪的结构特点,如其套筒座、枪身分解杆、空仓挂机解脱杆、手动保险的设置与西格手枪相似,而套筒的设置则与CZ手枪相似。
与大多数手枪不同,其套筒套装在套筒座外侧,故套筒显得较宽大。
套筒两侧前后均制有较宽大的防滑纹,方便操作。
套筒座前端下方设有皮卡汀尼导轨,方便安装附件。
其套筒颜色为深灰色,而套筒座有橄榄绿色、沙漠色及黑色3种。
该枪口径为9mm,发射9mm巴拉贝鲁姆枪弹,全枪长190mm,枪管长108mm,空枪质量0.81kg,弹匣容弹量有15、18、20发3种。
瑞士克瑞斯公司斯芬克斯SDP阿尔法紧凑型手枪斯芬克斯SDP阿尔法紧凑型手枪(Sphinx SDP CompactAlpha Pistol)是克瑞斯(KRISS)公司的最新产品。
该枪的特点是击锤外露部分短小,击锤虽然外露,但尾端没有向后突出的扳齿柄,外露式击锤无法用手操作。
该枪采用单动/双动发射方式,双动操作时,击锤处于击发位,直接扣动扳机便可以双动方式击发。
而单动击发则比较麻烦,击锤处于击发位时,扣动扳机,带动击锤向后旋转,使击锤处于待击位置,松开扳机,然后再扣动扳机,则为单动击发。
auga3突击步枪

未来改进方向
轻量化设计
通过采用更轻的材料和优化内部结构,降低武器 重量。
增强耐用性
提高武器部件的耐磨性和抗腐蚀性,延长武器使 用寿命。
增加射击精度
改进枪管制造工艺和校准方法,提高射击精度和 稳定性。
技术创新与展望
采用新材料
探索采用新型复合材料和轻质合金,提高武器强度和耐久性。
智能化瞄准
研究采用智能瞄准系统,提高射击精度和作战效率。
弹匣设计
容量大
采用30发容量弹匣,保证火力持续 性和作战效率。
易பைடு நூலகம்换
弹匣采用双排双进设计,便于快速更 换弹匣。
枪托与握把
人机工程
枪托和握把均采用人机工程设计,确保舒适握持和操作。
可调节
枪托长度可调节,以适应不同身高的使用者的需求。
03 性能分析
射击精度
良好
Auga3突击步枪采用了先进的瞄准系统,具有较高的射击精度和稳定性,能够在 不同距离上实现准确的打击。
05 战场应用与评价
阿富汗战争中的应用
2001年阿富汗战争中,auga3 突击步枪首次投入实战。
在阿富汗战争中,auga3突击 步枪展现了优秀的可靠性和适 应性。
在阿富汗的复杂山地环境和炎 热气候中,auga3突击步枪的 性能表现稳定,且易于维护。
伊拉克战争中的应用
2003年伊拉克战争 中,auga3突击步枪 被广泛使用。
弹药
AUG A3使用的是5.56毫 米口径的弹药,与M4卡 宾枪的弹药兼容,但具有 更好的射击效果。
配件
AUG A3具有更多的配件 选项,如战术导轨、战术 灯、榴弹发射器等,比 M4卡宾枪更加灵活。
与AK-47的比较
射击效果
基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别

第38卷第3期大连海洋大学学报Vol.38No.3 2023年6月JOURNAL OF DALIAN OCEAN UNIVERSITY June2023DOI:10.16535/ki.dlhyxb.2022-354文章编号:2095-1388(2023)03-0533-10基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别袁红春,陶磊∗(上海海洋大学信息学院,上海201306)摘要:为解决传统商业渔船电子监控数据中鱼类检测与识别任务人工成本高㊁工作量大等问题,采用基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别方法,其中,主干网使用GCBlock结构对远程依赖关系建模,以增加特征提取能力;Neck端使用GSConv新型卷积方式,以减少模型计算量;使用SIOU损失函数解决CIOU损失函数的局限性,以提升模型检测精度㊂结果表明:提出的Yolov8n-GCBlock-GSConv模型在FishNet数据集不同标签L1和L2上的mAP@0.5为43.6%和52.7%,相比原Yolov8n模型分别提高了2.0%和4.3%,计算量为7.7GFLOPS,比原模型降低了0.5GFLOPS㊂研究表明,本研究中提出的Yolov8n-GCBlock-GSConv模型能以更低的成本,快速准确地完成商业渔船电子监控数据中鱼类的检测与识别㊂关键词:Yolov8;商业渔船;目标检测;目标识别;网络优化中图分类号:S977;TP391.4㊀㊀㊀㊀文献标志码:A㊀㊀目前,在全球商业渔船上安装了大约1000种电子监控(electronic monitoring,EM)系统[1]㊂EM系统将会记录完整的捕鱼活动,产生大量的视频数据,可允许研究人员在不登船的情况下观察渔获情况㊂实现EM系统中鱼类的高精度检测与识别,不仅能够显著提高捕捞效率㊁节约人类观察员成本[2],而且在改善渔业科学管理㊁提高渔业监管透明度和市场问责制等方面发挥着重要作用㊂因此,快速准确地完成EM系统中鱼类的检测与识别具有重要意义㊂对于EM系统中鱼类的检测与识别,传统方式是通过人工处理分析EM系统中的视频数据[3],而人工成本相对较高,需要更多的人力资源,阻碍了EM系统的普及[4]㊂近年来,随着人工智能㊁计算机视觉等领域技术的不断发展,部分专家学者开始将基于卷积神经网络(convolutional neural network, CNN)应用于解决海洋科学和海洋资源管理中的复杂问题[5]㊂目前,已有多位研究学者提出了基于CNN的商业渔船EM视频数据中鱼类的检测与识别,French等[6]使用Mask R-CNN对EM系统视频中的鱼类进行检测与识别,平均精度仅为63%,而人类观察员的平均精度为74%~86%,前者无法完成物种的细粒度分类,且出现多次错误分类结果㊂Mujtaba等[7]使用RegNetX-16GF为基础结构训练了TunaConvNet-4和TunaConvNet-2两个模型,其中,TunaConvNet-4模型可识别4种相似的金枪鱼,TunaConvNet-2模型可识别大眼金枪鱼㊁黄鳍金枪鱼,在对数据集进行数据增强,包括添加图像噪声㊁更改亮度等操作之后,在两个不同的数据集上分类准确率均高达90%,但是,对于图像中鱼类的定位需要通过手工标注,往往需要高昂的人工成本和较大的工作量㊂Van Essen等[8]模拟真实海上渔船EM系统采集的数据集,以Yolov3为基准网络模型,实现了EM视频中鱼类的检测与识别,在不同遮挡情况下可以达到80%的平均检测精度,但网络的泛化能力较弱,未能验证在真实场景下的检测与识别精度是否可以保持㊂Kay等[9]在真实的渔船工作环境下,以RetinaNet-ResNet101-FPN 为基准网络模型,实现了EM视频中鱼类的检测与识别,将数据集的标签种类分为L1㊁L2㊁tuna/ not-tuna和fish,在不同标签下的mAP@0.5分别达到25.4%㊁33.8%㊁44.5%和53.0%,但是模型㊀收稿日期:2022-12-04㊀基金项目:国家自然科学基金(41776142)㊀作者简介:袁红春(1971 ),男,博士,教授㊂E-mail:hcyuan@ ㊀通信作者:陶磊(1998 ),男,硕士研究生㊂E-mail:3170270371@检测与识别精度还有待进一步提高㊂目前,基于卷积神经网络的商业渔船EM 系统中鱼类的检测与识别方法存在两方面的问题:一是,在真实场景下检测与识别精度低,鱼类的细粒度分类较困难;二是,检测与识别精度高的模型,成本较高,并消耗更多的计算资源㊂对于在真实场景下,如何以更低成本高效完成商业渔船EM 系统中鱼类检测与识别的研究较少㊂本研究中,对Yolov8n 模型进行改进,在主干网中使用GCBlock 以提高模型的特征提取能力,对模型的Neck 端和目标框回归损失函数进行优化,并使用了FishNet 公开数据集,以期完成真实场景下商业渔船EM 系统中鱼类的检测与识别㊁鱼类的细粒度分类,并满足检测速度快㊁精度高和计算成本低的需求㊂1㊀FishNet 数据集和数据预处理1.1㊀FishNet 数据集FishNet [9]是一个用于商业渔船EM 系统中鱼类检测和精细视觉分类的数据集,由西太平洋和中太平洋延绳钓金枪鱼渔船上EM 系统视频以每秒一帧采集的图像组成,标签标注信息由Sama 数据注释公司提供,并由领域专家手动检查修改㊂其中,4种视觉上相似的金枪鱼物种[albacore (长鳍金枪鱼)㊁yellowfin tuna (黄鳍金枪鱼)㊁skipjack tu-na (鲣)和bigeye tuna (大眼金枪鱼)]占绝大多数(超过85%),包含鱼的注释,其余的鱼类注释分为25个物种,这29个细粒度的类组成了L1标签集㊂部分L1标签鱼类图像如图1所示(随机选择并使用标注框裁剪)㊂此外,联合国粮农组织ASFIS 渔业统计物种列表根据物理形态将物种分为12个较粗的类别,如比目鱼(bilfish)㊁马林鱼(marlin)和旗鱼(saifish)等,该列表中的部分类别组成了L2标签集,L1㊁L2标签集具体类别和关系如表1所示㊂在商业渔船捕鱼作业过程中,数据集中图像状态可分为理想状态(良好的照明㊁高可见度和无遮挡)及挑战性状态(夜间作业㊁恶劣天气㊁镜头上的水滴和船员混乱活动造成的鱼遮挡),图像状态对比如图2所示㊂某些捕获鱼类在非理想状态下很难在物种级别进行分类,所以在L1和L2标签集两者都包含许多模糊标签(如L1集中的marlin㊁tuna 和unknown,以及L2集中的TUNA 和OTH)㊂由于本研究主要是针对鱼类进行高精度检测和识别,在计算最终的平均精度均值时,不考虑标签中的非鱼类标签(如L1中的human㊁no fish 等和L2中的HUMAN㊁NoF 等)及模糊标签的检测精度㊂图1㊀L1标签鱼类图像示例Fig.1㊀Example of L1labeled fishimages图2㊀不同场景下图像状态对比Fig.2㊀Image state comparison in different scenarios435大连海洋大学学报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第38卷表1㊀L1、L2标签中类别的对应关系Tab.1㊀Correspondence of categories in L1and L2LabelsL1标签L1labelL2标签L2labelalbacore (长鳍金枪鱼)ALB bigeye tuna (大眼金枪鱼)BETblack marlin (黑马林鱼),blue marli (蓝马林鱼),In-do Pacific sailfish (印度太平洋旗鱼),marlin (马林鱼),shortbill spearfish (短嘴矛鱼),striped marlin (条纹马林鱼),swordfish (剑鱼)BILL mahi mahi (鲯鳅)DOL human (人)HUMANopah (月亮鱼)LAG no fish (无鱼)NoFbrama (乌鲂),escolar (蛇鲭),lancetfish (帆蜥鱼),great barracuda (巴拉金梭鱼),mola mola (翻车鱼),long snoutedlancetfish (长吻梭鱼),oilfish (油鱼),pomfret (鲳),unknown (未知),wahoo (刺鲅),sickle pomfret (镰刀鲳),snake mackerel (蛇鲭)OTHpelagic stingray (远洋黄貂鱼)PLSshark (鲨),thresher shark (长尾鲨)SHARK skipjack tuna (鲣)SKJtuna (金枪鱼)TUNA water (水)WATERyellowfin tuna (黄鳍金枪鱼)YFT 1.2㊀数据预处理由于FishNet 数据集中挑战性状态除了船员混乱活动造成的鱼遮挡问题,其余问题均为外界环境因素造成的图像不清晰㊂为去除环境因素的影响,采用色彩增益加权的AutoMSRCR (auto multi-scaleretinex with color restoration)模型对图像进行增强,增强结果对比如图3所示㊂2㊀Yolov8n 网络模型及其改进方法2.1㊀Yolov8n 网络模型Yolov8n 的网络分为输入端㊁主干网(Back-bone)㊁Neck 模块和输出端4个部分(图4)㊂输入端主要有马赛克(Mosaic)数据增强㊁自适应锚框计算和自适应灰度填充㊂主干网有Conv㊁C2f 和SPPF 结构,其中,C2f 模块是对残差特征进行学习的主要模块,该模块仿照Yolov7的ELAN 结构,通过更多的分支跨层连接,丰富了模型的梯度流,可形成一个具有更强特征表示能力的神经网络模块㊂Neck 模块采用PAN (path aggregation network)结构,可加强网络对不同缩放尺度对象特征融合的能力㊂输出端将分类和检测过程进行解耦,主要包括损失计算和目标检测框筛选,其中,损失计算过程主要包括正负样本分配策略和Loss 计算,Yolov8n 网络主要使用TaskAlignedAssigner [10]方法,即根据分类与回归的分数加权结果选择正样本;Loss 计算包括分类和回归2个分支,无Ob-jectness 分支㊂分类分支依然采用BCE Loss,回归分支则使用了Distribution Focal Loss [11]和CIOU (complete intersection over union)损失函数㊂2.2㊀特征提取主干网的改进在渔船行进过程中或者遇到风浪天气时,渔船上的电子监控摄像设备经常会粘上水滴,这将会导致拍摄图片中出现模糊区域,渔船的捕鱼作业通常在夜间执行,光线不足导致图像中鱼类目标难以分辨,同时,渔船工作人员的活动和恶劣的天气等均会导致图像不清晰㊁背景杂乱㊂这些场景下,卷积图3㊀环境因素影响下的图像与增强后图像对比Fig.3㊀Images under the influence of environmental factors compared to enhanced images535第3期袁红春,等:基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别图4㊀改进后的Yolov8n网络模型Fig.4㊀Improved Yolov8n model神经网络在提取图像特征时将会产生大量噪声,割裂像素间的远程依赖关系,最终导致检测与识别准确率降低㊂捕获远程依赖,被证明有利于计算机视觉任务,可以提高目标检测与识别效果㊂NLNet网络[12]是通过自注意力机制建立模像素对关系,然而NLNet对于每一个位置学习不受位置依赖的Attention Map,造成了大量的计算资源浪费[13]㊂SENet网络[14]用全局上下文对不同通道进行权值重标定,以调整通道依赖㊂然而,采用权值重标定的特征融合,不能充分利用全局上下文[15]㊂GC-Net[16]网络既能够像NLNet网络一样有效地对全局上下文建模,又能够像SENet网络一样轻量㊂GCNet网络中的GCBlock模块结构如图5(a)所示,该模块主要分为3个部分:首先,全局上下文建模采用1ˑ1卷积W k和Softmax函数来获取Atten-tion权值,执行Attention pooling以获得全局上下文特征;其次,捕获通道间依赖采用两层1ˑ1卷积W v1和W v2降低计算量,并在ReLU前增加LayNorm结构以降低优化难度,提高泛化性;最后,特征融合步骤中使用Broadcast Element-wise Addition方法来聚合全局上下文特征到每个位置的特征上㊂GCNet网络充分结合了NLNet网络全局上下文建模能力强和SENet节省计算量的优点㊂因此,本研究中提出在Yolov8n主干网中使用GCBlock模块对原C2f结构进行改进,形成新的C2fGC结构,可以使模型完成对远程依赖关系建模(图5(b))㊂第一个C2f模块的特征图和将此模块替换为C2fGC模块后的特征图对比如图6所示,可以明显看出,C2fGC模块的特征图比原C2f模块的特征图更加清晰㊂图5㊀GCBlock结构和C2fGC模块Fig.5㊀GCBlock structure and C2fGC module 2.3㊀特征融合Neck端的改进在商业渔船出海工作期间,EM系统将会产生大量的视频数据,如果使用原Yolov8n模型进行鱼类目标检测和识别,将会使用较高的计算资源成本,且检测速度也有待进一步提高㊂为了提高模型的检测速度,一些有效的轻量级网络模型,如Xception[17]㊁MobileNet[18]㊁ShuffleNet[19]和Ghost-Net[20]等可通过深度可分离卷积(depth-wise sepa-rable convolution,DConv)提高模型检测速度,但该635大连海洋大学学报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第38卷类模型在FishNet 数据集上的准确性较低,主要是由于深度可分离卷积输入特征图的通道信息在计算过程中是分离的,舍弃了通道之间的信息交互㊂本研究中使用GSConv [21]新型卷积方式(图6(a)),该卷积方式的主要思想是使用均匀混合(Shuffle)操作,将标准卷积生成的信息渗透到深度可分离卷积生成的信息中,使用较低的时间损耗尽可能保留通道之间的信息交互㊂本研究在GSConv 的基础上进一步设计了GS-Bottleneck 和C2fGS 结构,如图6(b)㊁(c)所示,在Neck 端使用GSConv 代替普通卷积操作,用C2fGS 模块代替原来的C2f 模块,在减少模型计算复杂度和推理时间的同时保持其准确性㊂2.4㊀IOU 损失函数的改进在Yolov8n 模型中使用CIOU[22]作为检测框回归损失函数,考虑了边界框回归中预测框和真实框的重叠面积㊁中心点距离和纵横比,即{(W =kW gt ,H =kH gt )k ɪR +}㊂(1)式中:W 和H 分别为预测框的宽和高;W gt 和H gt分别为真实框的宽和高㊂式(1)中纵横比仅反映了预测框与真实框宽或高的比值关系,当不同预测框和真实框间的纵横比相同时,此时CIOU 的计算结果是相同的㊂图6㊀GSConv ㊁GSBottleneck 结构及C2fGS 模块Fig.6㊀GSConv structure ,GSBottleneck structure andC2fGS module针对这个问题,本研究中使用了SIOU [23]作为检测框回归损失函数㊂SIOU 考虑到所需回归之间的向量角度,重新定义了惩罚指标,SIOU 损失(U SIO )包括距离损失Δ㊁形状损失Ω和IOU 损失(U IO )3个部分,其计算公式为U SIO =U IO -(Δ+Ω)/2㊂(2)3㊀结果与分析本研究试验环境如下:Linux Ubuntu 16.04.4LTS 的操作系统,AMD Ryzen 95950X16CPU,24GB 显存的NVIDIA GeForce RTX 3090GPU㊂使用Yolov8n 为基准网络模型,超参数设置批大小(batch size)为16,训练周期(epochs)为300,初始学习率(learning rate)为0.01㊂3.1㊀评价指标采用计算量衡量网络模型的执行时间,使用每秒10亿次的浮点运算数(giga floating-point opera-tions per second,GFLOPS)为单位,计算量越大意味着需要占用更多的计算资源;采用平均精度均值(mean average precision,mAP),评价模型的准确性,即对所有类别的平均精度(average precision,AP)值求平均值,其计算公式为P mA =ðP A /N ㊂(3)式中:P mA 为mAP;N 为类别总数;P A 为以召回率为横轴㊁精确度为纵轴组成的曲线围成的面积㊂mAP@0.5为IOU 阈值为0.5时的平均精度均值㊂3.2㊀改进方法效果对比为探究本研究中提出的改进方法的效果,对Yolov8n 模型进行了网络结构改进和参数的优化调整,以FishNet 数据集作为训练㊁验证数据集,通过试验结果对比各种改进方法的效果㊂3.2.1㊀主干网改进试验㊀由于Yolov8n 模型的主干网中共有4个C2f 模块,将每个C2f 模块替换为C2fGC 模块后,4个C2fGC 模块中分别有3㊁6㊁6㊁3个GCBlock 结构㊂同时,使用NLNet 中的NL-Block 和SENet 中的SE 注意力机制对主干网进行修改㊂试验结果表明,NLNet 和SENet 可提高模型的准确性,但计算量分别提高了11.3GFLOPS 和4.6GFLOPS,是原模型的2.4倍和1.6倍,而使用C2fGC 模块在计算量小幅增加的同时,检测准确性mAP@0.5最高提高了4.7%(表2)㊂由于在主干网中,过多地使用C2fGC 模块会导致网络层数增加,加剧对数据流的阻力,因此,本研究中仅将主干网中第一个C2f 模块替换为C2fGC 模块㊂3.2.2㊀Neck 端改进试验㊀在Neck 端使用不同的轻量化结构对Yolov8n 模型进行改进,即在Neck 端使用不同的卷积方式和以此卷积方式构造的C2f 模块,展示不同方法对于模型准确性和计算量的影响结果㊂735第3期袁红春,等:基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别表2㊀主干网改进后的模型性能对比Tab.2㊀Comparison of model performance after Backbone improvement模型model mAP@0.5/%L1L2计算量/GFLOPScomputation网络层数layerYolov8n41.648.48.2225 Yolov8n+NLBlock43.351.719.5342 Yolov8n+SE42.750.312.8287 Yolov8n+1C2fGC(3GCBlock)43.552.18.3252 Yolov8n+2C2fGC(9GCBlock)43.151.48.5315 Yolov8n+3C2fGC(15GCBlock)42.449.88.8413 Yolov8n+4C2fGC(18GCBlock)41.549.19.1440㊀㊀试验结果表明,DConv㊁ShuffleNet和Ghost-Convu卷积方法均可降低模型计算量㊂由于DConv 方法在卷积过程中无通道信息交互,而ShuffleNet 中提出的分组卷积通道重排和GhostConv压缩通道信息的方法,虽然对深度可分离卷积的缺陷有所改进,但改进后的模型检测精度均有所下降㊂本研究中使用的GSConv方法不仅可以降低模型约10%的计算量,且改进后模型的检测精度略有上升(表3)㊂表3㊀Neck端改进后的模型性能对比Tab.3㊀Comparison of model performance after Neck ter-minal improvement模型model mAP@0.5/%L1L2计算量/GFLOPScomputationYolov8n41.648.48.2 Yolov8n+DConv40.246.57.3 Yolov8n+ShuffleNet39.846.17.4 Yolov8n+GhostConv40.446.77.9 Yolov8n+GSConv41.948.67.5 3.2.3㊀IOU损失函数的改进㊀对比常用损失函数IOU㊁DIOU[22]㊁GIOU[24]㊁CIOU和SIOU对模型精度的影响,结果表明,各模型均在250轮训练后收敛(图7),而SIOU损失函数有最低的边框回归误差,结合表4中的试验结果可知,使用SIOU损失函数的模型(Yolov8n+SIOU)具有更高的精度,可在原模型(Yolov8n+CIOU)基础上使mAP@0.5在L1和L2标签下分别提高1.2%和1.1%㊂3.3㊀消融试验从表5可见:在主干网使用C2fGC模块代替原有的C2f模块(仅替换第一个C2f模块),在L1㊁L2两种不同标签类型下,mAP@0.5分别提升了1.9%和3.7%;在特征融合Neck端使用C2fGS模块代替C2f模块,可以使计算量降低8.5%,显著减少计算资源的占用;当C2fGC和C2fGS模块配合使用时,可以做到降低计算量的同时提升mAP;使用SIOU损失函数,解决了CIOU 在真实场景下的局限性,对于模型的检测效果有一定提升作用㊂图7㊀不同IOU损失函数曲线Fig.7㊀Loss function curves of different IOU表4㊀使用不同IOU损失函数的模型性能对比Tab.4㊀Comparison of model performance using different IOU loss function模型modelmAP@0.5/%L1L2 Yolov8n+CIOU41.648.4 Yolov8n+IOU40.347.5 Yolov8n+DIOU41.048.1 Yolov8n+GIOU40.447.7 Yolov8n+SIOU42.849.5表5㊀消融试验结果Tab.5㊀Ablation experiment resultsC2fGC C2fGS SIOU mAP@0.5/%L1L2计算量/GFLOPScomputation41.648.48.243.552.18.341.948.67.542.849.58.240.051.57.743.652.77.7㊀㊀综合试验结果,同时使用C2fGC模块㊁C2fGS 模块和SIOU损失函数,经过300轮迭代训练,最终改进后的Yolov8n模型在准确率和计算量上均优于原Yolov8n模型,在L1㊁L2两种标签类别下, mAP@0.5分别提升了2.0%和4.3%,计算量减少了6.1%(图8,表5)㊂3.4㊀不同模型的检测与识别对比试验将改进模型与其他主流目标检测模型包括两阶段有锚框检测模型Faster R-CNN[25]㊁一阶段有锚835大连海洋大学学报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第38卷框检测模型SSD [26]和一阶段无锚框检测模型FCOS [27]等进行测试对比,采用相同的数据集㊁试验条件和图像增强方法,所有模型均未使用预训练模型,根据实际情况分为夜间作业㊁水滴遮挡摄像头和船员混乱活动3个试验㊂选择FishNet 数据集中典型的3张图片进行检测识别,使用L1标签类别,将检测结果在未增强的原图上显示,最终结果如图9所示㊂图8㊀L1、L2标签下模型改进前后的mAP 曲线对比Fig.8㊀Comparison of mAP curves before and after algorithm improvement under L1and L2tags图9㊀不同场景下不同模型对比试验的可视化结果Fig.9㊀Visual results of comparison experiment with different models in different scenarios935第3期袁红春,等:基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别㊀㊀在试验1(夜间作业)中,Faster R-CNN模型有严重的误检和漏检现象,SSD㊁FCOS㊁Yolov8n 和Yolov8n-GCBlock-GSConv模型基本无误检和漏检现象,但是前3种模型物体分类准确度较低;在试验2(水滴遮挡摄像头)中,Faster R-CNN和SSD模型检测结果完全错误,FCOS和Yolov8n模型均漏检了图像右下角的长鳍金枪鱼,Yolov8n-GCBlock-GSConv模型不仅检测到图像中的所有目标,且检测框比FCOS和Yolov8n模型更加准确;在试验3(船员混乱活动)中,前4个模型主要存在对物体的多次框定问题,Yolov8n-GCBlock-GSConv模型则可以准确地检测出所有物体㊂综合试验结果表明,本研究中提出的Yolov8n-GCBlock-GSConv模型具有更高的检测精度㊁更精确的检测框和更高的分类可信度㊂从表6可见,在FishNet数据集下,本研究中提出的Yolov8n-GCBlock-GSConv模型在L1㊁L2两种不同的标签下,mAP@0.5分别达到了43.6%和52.7%检测精度,远高于其他4种目标检测模型,且计算量仅为7.7GLOPS㊂表6㊀不同模型的检测性能对比Tab.6㊀Performance comparison of different models模型model mAP@0.5/%L1L2计算量/GFLOPScomputationFaster R-CNN36.845.9273.4 SSD37.746.561.2 FCOS39.447.241.7 Yolov8n41.648.48.2 Yolov8n-GCBlock-GSConv43.652.77.74㊀讨论4.1㊀远程依赖关系建模对模型性能的影响为了提高模型的特征提取能力,充分利用像素的上下文信息,在模型中对远程依赖关系建模是相对有效的方法,可以在原模型中融合NonLocal㊁SE注意力和GCBlock模块等㊂Xue等[28]基于GCBlock模块构建了Yolo-Tea茶叶病虫害识别模型,在自然环境中如叶子阴影㊁照明和小尺寸问题下,该模型可以捕获像素的远程依赖关系,具有更高的特征提取能力,平均检测精度(mAP@0.5)较原模型提升了7.6%㊂Ye等[29]为了使高级特征充分利用其上下文信息,采用了GCBlock模块来捕获远程依赖关系,通过提高全局上下文建模和局部特征提取的能力,使低层小目标检测层能够获得更有效的特征信息㊂Wang等[30]使用GhostNet和GCBlock模块构建了基于Yolov4框架的轻量级高精度检测模型GG-Yolov4,用于从奶牛的热图像中自动检测奶牛的眼睛表面温度㊂模型中引入全局上下文网络(GCBlock)模块,可以获得完善有效的特征信息,弥补了轻量化模型因光照不足而造成的精度损失,提高了轻量化模型的检测精度㊂本研究中,在Yolov8n主干网中使用GCBlock模块,对远程依赖关系建模,提高了模型对于真实场景下的商业渔船EM系统中鱼类的检测识别精度㊂这与上述网络模型改进思想一致,在不大幅提升模型计算量和参数的同时,提升了模型的检测与识别精度㊂4.2㊀网络模型轻量化对检测效果的影响目前,对目标检测模型进行轻量化设计的主要方法均是从深度可分离卷积发展而来,而GSConv 弥补了深度可分离卷积中舍弃了通道信息交互的缺点㊂梁秀满等[31]以Yolov4为基础提出的轻量级带钢缺陷实时检测模型SSD-Yolo,在Neck端采用GSConv卷积代替标准卷积,结果表明,该文提出的模型相较于Yolov4,模型参数量减少71.6%,浮点运算量降低74.6%,检测精度提高3.49%,在减少模型参数量和计算量的同时提升了模型的检测精度㊂Yu等[32]在Yolov5模型Neck层引入GSConv和Slim-Neck模块,提高了模型的精度和其他指标,实现了对机器人手臂和AGV小车等生产线设备的实时检测和定位㊂Yuan等[33]将Yolov5模型应用于PCB缺陷检测领域,并在Neck端采用了相应的GSConv实现网络模型的轻量化,与原Yolov5模型相比,改进后的模型参数只有原模型的64.5%,平均精度均值比原模型提高2.4%㊂Hu 等[34]提出一种交通标志检测与识别模型PSG-Yolov5,引入GSConv后进一步降低了模型的计算复杂度,更好地满足了工业应用㊂与上述网络模型轻量化思路相同,本研究中在Neck端使用以GSConv为基础设计的C2fGS结构,并将Neck端使用的普通卷积方式替换为GSConv,试验结果表明,此方法不仅可以有效降低模型大小,降低模型约10%的计算量,而且改进后模型的检测精度略有上升㊂5㊀结论1)本研究中提出的一种改进Yolov8n的鱼类检测与识别模型Yolov8n-GCBlock-GSConv,该模型在FishNet数据集上,对于不同的标签L1㊁L2下045大连海洋大学学报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第38卷mAP@0.5分别达到了43.6%㊁52.7%,模型最终的计算量为7.7GFLOPS,可以更加快速准确地完成商业渔船电子监控数据中鱼类的检测与识别,且计算成本更低㊂2)将Yolov8n原来主干网中的第一个C2f模块替换为以GCBlock为基础的C2fGC模块,提高了模型对远程依赖关系的建模能力,在Neck端使用GSConv和C2fGS代替原模型普通卷积的C2f模块,减少了模型计算量,使用SIOU代替CIOU损失函数计算边框损失,提高了检测精度㊂表明Yolov8n-GCBlock-GSConv模型在检测精度和计算量上均优于原Yolov8n模型,在L1㊁L2两种标签类别下mAP@0.5分别提升了2.0%和4.3%,计算量减少了6.1%,做到了模型轻量化和检测精度佳两者的兼顾㊂3)本研究中提出的Yolov8n-GCBlock-GSConv 模型在L1㊁L2两种不同的标签下的mAP相较于Faster R-CNN㊁SSD㊁FCOS和Yolov8n模型均有提高,模型计算量均有减少,适宜部署在算力资源不足的嵌入式设备上㊂参考文献:[1]㊀MICHELIN M,ELLIOTT M,BUCHER M,et al.Catalyzing thegrowth of electronic monitoring in fisheries[J].California Environ-mental Associates and the Nature Conservancy,2018. [2]㊀王书献,张胜茂,朱文斌,等.基于深度学习YOLOV5网络模型的金枪鱼延绳钓电子监控系统目标检测应用[J].大连海洋大学学报,2021,36(5):842-850.㊀㊀㊀WANG S X,ZHANG S M,ZHU W B,et al.Application of an e-lectronic monitoring system for video target detection in tuna long-line fishing based on YOLOV5deep learning model[J].Journal ofDalian Fisheries University,2021,36(5):842-850.(in Chinese) [3]㊀HELMOND A T M,MORTENSEN L O,PLET-HANSEN K S,etal.Electronic monitoring in fisheries:lessons from global experi-ences and future opportunities[J].Fish and Fisheries,2020,21(1):162-189.[4]㊀NEEDLE C L,DINSDALE R,BUCH T B,et al.Scottish scienceapplications of remote electronic monitoring[J].ICES Journal ofMarine Science,2015,72(4):1214-1229.[5]㊀HUANG T W,HWANG J N,ROMAIN S,et al.Recognizing fishspecies captured live on wild sea surface in videos by deep metriclearning with a temporal constraint[C]//2019IEEE InternationalConference on Image Processing(ICIP).Taipei,China:IEEE,2019:3407-3411.[6]㊀FRENCH G,MACKIEWICZ M,FISHER M,et al.Deep neural net-works for analysis of fisheries surveillance video and automatedmonitoring of fish discards[J].ICES Journal of Marine Science,2020,77(4):1340-1353.[7]㊀MUJTABA D F,MAHAPATRA N R.Convolutional neural net-works for morphologically similar fish species identification[C]//2021International Conference on Computational Science andComputational Intelligence(CSCI).Las Vegas,NV,USA:IEEE,2022:1553-1559.[8]㊀VAN ESSEN R,MENCARELLI A,VAN HELMOND A,et al.Au-tomatic discard registration in cluttered environments using deeplearning and object tracking:class imbalance,occlusion,and acomparison to human review[J].ICES Journal of Marine Science,2021,78(10):3834-3846.[9]㊀KAY J,MERRIFIELD M.The FishNet open images database:adataset for fish detection and fine-grained categorization in fisher-ies[EB/OL].2021.arXiv:2106.09178.https:///abs/2106.09178.[10]㊀FENG C J,ZHONG Y J,GAO Y,et al.TOOD:Task-Aligned one-stage object detection[C]//2021IEEE/CVF International Con-ference on Computer Vision(ICCV).Montreal,QC,Canada:IEEE,2022:3490-3499.[11]㊀LI X,WANG W,WU L,et al.Generalized focal loss:learningqualified and distributed bounding boxes for dense object detec-tion[EB/OL].2020.arXiv:2006.04388.https:///abs/2006.04388.[12]㊀WANG X L,GIRSHICK R,GUPTA A,et al.Non-local neuralnetworks[C]//2018IEEE/CVF Conference on Computer Visionand Pattern Recognition.Salt Lake City,UT,USA:IEEE,2018:7794-7803.[13]㊀YIN M H,YAO Z L,CAO Y,et al.Disentangled non-local neuralnetworks[M]//Computer Vision-ECCV2020.Cham:SpringerInternational Publishing,2020:191-207.[14]㊀HU J,SHEN L,SUN G.Squeeze-and-excitation networks[C]//2018IEEE/CVF Conference on Computer Vision and PatternRecognition.Salt Lake City,UT,USA:IEEE,2018:7132-7141.[15]㊀WANG Q L,WU B G,ZHU P F,et al.ECA-net:efficient channelattention for deep convolutional neural networks[C]//2020IEEE/CVF Conference on Computer Vision and Pattern Recogni-tion(CVPR).Seattle,WA,USA:IEEE,2020:11531-11539.[16]㊀CAO Y,XU J R,LIN S,et al.GCNet:non-local networks meetsqueeze-excitation networks and beyond[C]//2019IEEE/CVFInternational Conference on Computer Vision Workshop(IC-CVW).Seoul,Republic of Korea:IEEE,2020:1971-1980. [17]㊀CHOLLET F.Xception:deep learning with depthwise separableconvolutions[C]//2017IEEE Conference on Computer Visionand Pattern Recognition(CVPR).Honolulu,HI,USA:IEEE,2017:1800-1807.[18]㊀HOWARD A,SANDLER M,CHEN B,et al.Searching for Mo-bileNetV3[C]//2019IEEE/CVF International Conference onComputer Vision(ICCV).Seoul,Republic of Korea:IEEE,2020:1314-1324.[19]㊀MA N N,ZHANG X Y,ZHENG H T,et al.ShuffleNet V2:practi-cal guidelines for efficient CNN architecture design[C]//Com-puter Vision-ECCV2018:15th European Conference,Munich,Germany.Proceedings,Part XIV.New York:ACM,2018:122-138.[20]㊀HAN K,WANG Y H,TIAN Q,et al.GhostNet:more features from145第3期袁红春,等:基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别。
苏俄核潜艇全集
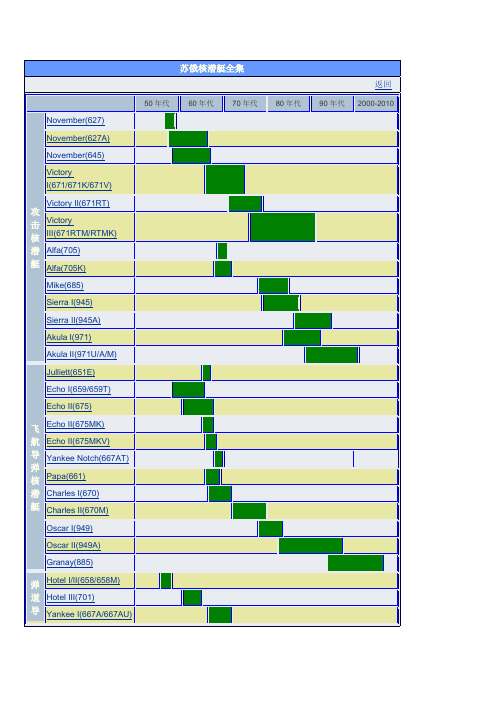
5-200赫兹噪声(分贝) 170 1000赫兹噪声(分贝)150武备鱼雷СЭТ-65 鱼雷53-65К鱼雷发射装置533毫米气压发射管×8 武器携载数20电子设备雷达Призма 棱镜导航设备Плутон-627 普鲁顿627型电子侦察Накат综合声呐МГ-200 Арктика-М 北极侦察声呐МГ-13М测距声呐МГ-10探雷声呐Луч 卢克通信设备Молния 闪电敌我识别科劳姆КМ作战指控系统特里型鱼雷发射指挥装置船型参数长宽比13.49 海军系数1971953年时侧视图↓1963年时双视图↓November俄罗斯攻击核潜艇图解同级舰资料返回首页型号627A 中文名称十一月总体同级艇数量12 艇长(米)107.4艇宽(米)7.96 吃水(米) 6.48水面排水量(吨) 3101 水下排水量(吨)4750储备浮力(%)31.2 艇体结构双壳舱段数9 艇体材料АК-25钢编制数量110 编制说明军官24名,士官33名,水兵53名动力核反应堆ВМ-А型压水堆×2 反应堆功率(兆瓦)140剖视图↓推进主机60-Д型汽轮机×2 主机功率(马力)35000辅助推进发动机ПГ-116型×2 辅推功率(马力)900柴油发电机ДГ-400型柴油发电机×2 柴油发电机功率(马力) 1088蓄电池28-СМ1型×2组112块推进器变距螺旋桨×2 水下航速(节)30.1 水面航速(节)15.2续航力(海里/节) 166000/5.7,106000/17.4 自持力(天)50最大潜深(米)300 安全潜深(米)240武备鱼雷СЭТ-65 鱼雷53-65К鱼雷发射装置533毫米气压发射管×8 武器携载数20电子设备雷达Призма 棱镜导航设备Плутон-627 普鲁顿627型电子侦察Накат综合声呐МГ-200 Арктика-М 北极侦察声呐МГ-13М测距声呐МГ-10探雷声呐Луч 卢克通信设备Молния 闪电敌我识别科劳姆КМ作战指控系统特里型鱼雷发射指挥装置船型参数长宽比13.49 海军系数220侧视图↓剖视图↓November俄罗斯攻击核潜艇图解同级舰资料返回首页型号645 中文名称十一月总体同级艇数量 1 艇长(米)109.8艇宽(米)8.3 吃水(米) 5.9水面排水量(吨)3414 水下排水量(吨) 5078储备浮力(%)28 艇体结构双壳舱段数9 艇体材料АК-25钢编制数量105动力核反应堆ВТ-1型液体金属冷却型反应堆×2推进主机60-Д型汽轮机×2主机功率(马力)35000 辅助推进发动机ПГ-116型×2辅推功率(马力)900 柴油发电机ДГ-400型柴油发电机×2 柴油发电机功率(马力) 1088 蓄电池28-СМ1型×2组112块推进器变距螺旋桨×2 水下航速(节)30.2水面航速(节)14.7 自持力(天)50最大潜深(米)300 安全潜深(米)270武备鱼雷СЭТ-65 鱼雷53-57鱼雷发射装置533毫米气压发射管×8 武器携载数20电子设备雷达Призма 棱镜导航设备Плутон-645 普鲁顿645型电子侦察Накат-М综合声呐МГ-200 Арктика-М 北极侦察声呐МГ-13М测距声呐МГ-10探雷声呐Луч 卢克通信设备Молния 闪电敌我识别科劳姆КМ作战指控系统特里型鱼雷发射指挥装置船型参数长宽比13.23 海军系数232航行照片↓剖视图↓Victor I俄罗斯攻击核潜艇图解同级舰资料返回首页型号671/671К/671В中文名称维克多1总体同级艇数量15 艇长(米)93艇宽(米)10.6 吃水(米)7.3剖视图↓1——“Рубин 红宝石”主声呐站基阵;2——“Радиан-1 弧度”探雷声呐;3——533毫米鱼雷发射管;4——鱼雷装载舱口;5——鱼雷舱;6——艏救生浮标;7——前舱口;8——备用鱼雷室及快速装填装置;9——鱼雷无泡发射水舱;10——首纵倾平衡水舱;11——“Брест-671 勃列斯特”鱼雷指挥仪和“Рубин 红宝石”声呐站;12——蓄电池;13——艏水平舵及传动装置;14——主压载水舱;15——中央舱;16——“Рубин红宝石”声呐基阵;17——驾驶台;18——陀螺罗经复示器;19——“Орион-10 奥里昂”潜望镜;20——“Залив 海湾-П”电子侦察天线;21——“Каскад 梯形瀑布”雷达天线;22——“烟幕Завеса-П”无线电定向仪;23——“柳树Ива-МВ”通信天线;24——耐压指挥室;25——中央部位;26——电子设备和声呐室;27——辅机和全艇系统室;28——高压空气瓶;29——反应堆舱;30——反应堆及蒸汽发生器、循环泵和屏蔽水箱;31——轮机舱;32——蒸汽轮机;33——行星齿轮减速器;34——主推力轴承;35——冷凝器;36——电气和辅机设备舱;37——艉救生浮标;38——高压空气系统压缩机;39——生活舱;40——推进电机及舵机舱;41——艉纵倾平衡水舱;42——水平舵传动装置;43——垂直稳定翼(注:可保存原图后放大对照查看)双视图↓首视图↓К-147首视图↓围壳↓1——“柳树Ива-МВ”通信天线;2——“烟幕Завеса-П”无线电定向仪;3——通气管装置;4——“Каскад 梯形瀑布”雷达天线;5——“Залив 海湾-П”电子侦察天线;6——“Орион-10 奥里昂”潜望镜К-147围壳↓1——“柳树Ива-МВ”通信天线;2——“烟幕Завеса-П”无线电定向仪;3——通气管装置;4——“Каскад 梯形瀑布”雷达天线;5——试验用航迹探测仪传感器;6——“Залив 海湾-П”电子侦察天线;7——“Орион-10 奥里昂”潜望镜Victor II俄罗斯攻击核潜艇图解同级舰资料返回首页型号671РТ中文名称维克多2总体同级艇数量8 艇长(米)102艇宽(米)10.6 吃水(米)7.3水面排水量(吨)4245 水下排水量(吨)5670储备浮力(%)34 艇体结构双壳舱段数8 艇体材料АК-29钢编制数量98 编制说明军官34名,士兵64名动力动力装置ОК-300 核反应堆ВМ-4П型压水堆×2推进主机ГТЗА-615型汽轮机×1 主机功率(马力)31000涡轮发电机ОК-2型涡轮发电机×2 涡轮发电机功率(马力) 5400辅助推进发动机ПГ-137型×2 辅推功率(马力)750柴油发电机柴油发电机×1 柴油发电机功率(马力)626蓄电池426-II型×2组112块推进器七叶螺旋桨×1 水下航速(节)31 水面航速(节)11自持力(天)60 最大潜深(米)400安全潜深(米)320 5-200赫兹噪声(分贝) 1631000赫兹噪声(分贝)143武备反舰导弹81Р 暴风雪-53 反潜导弹81Р 暴风雪-53鱼雷СЭТ-65 鱼雷53-65К鱼雷发射装置533毫米气压发射管×4 武器携载数18鱼雷65-76 鱼雷发射装置650毫米气压发射管×2 武器携载数 6电子设备雷达МРК-50 Каскад 梯形瀑布导航设备Медведица-РТ 牡熊星座-РТ电子侦察МРП-21А Залив 海湾-П综合声呐МГК-300 Рубин 红宝石探雷声呐МГК-519 Арфа-М 阿尔法-М通信设备Молния 闪电搜索潜望镜ПЗНГ-10М作战指控系统Аккорд 和弦作战情报指挥系统,拉多加Ладога 1В-671РТ型鱼雷发射指挥装置船型参数长宽比9.62 海军系数306剖视图↓1——“Рубин 红宝石”主声呐站基阵;2——“Арфа-М 阿尔法-М”探雷声呐;3——533毫米鱼雷发射管;4——650毫米鱼雷发射管;5——鱼雷装载舱口;6——鱼雷舱;7——艏救生浮标;8——前舱口;9——备用鱼雷室及快速装填装置;10——备用533毫米鱼雷;11——备用650毫米鱼雷;12——鱼雷无泡发射水舱;13——首纵倾平衡水舱;14——“Брест-671 勃列斯特”鱼雷指挥仪和“Рубин 红宝石”声呐站;15——蓄电池;16——首纵倾平衡水舱;17——艏水平舵及传动装置;18——主压载水舱;19——居住舱;20——中央指挥舱;21——“Рубин 红宝石”声呐基阵;22——驾驶台;23——ПЗНГ-10М潜望镜;24——МТ-70-10电视潜望镜;25——“Залив 海湾-П”电子侦察天线;26——“Каскад 梯形瀑布”雷达天线;27——“烟幕Завеса-П”无线电定向仪;28——“柏树Кипарис”通信天线;29——耐压指挥室;30——中央部位;31——电子设备和声呐室;32——辅机和全艇系统室;33——反应堆舱;34——反应堆及蒸汽发生器、循环泵和屏蔽水箱;35——轮机舱;36——蒸汽轮机;37——行星齿轮减速器;38——主推力轴承;39——冷凝器;40——电气和辅机设备舱;41——艉舱口;42——艉救生浮标;43——高压空气系统压缩机;44——生活舱;45——推进电机及舵机舱;46——艉纵倾平衡水舱;47——水平舵传动装置;48——垂直稳定翼(注:可保存原图后放大对照查看)侧视图↓首视图↓围壳↓1——“柏树Кипарис”通信天线;2——“烟幕Завеса”无线电定向仪;3——通气管装置;4——“Каскад 梯形瀑布”雷达天线;5——“Залив 海湾-П”电子侦察天线;6——МТ-70-10电视潜望镜;7——“Орион-10 奥里昂”潜望镜Victor III俄罗斯攻击核潜艇图解同级舰资料返回首页型号671РТМ/РТМК中文名称维克多3总体同级艇数量27 艇长(米)107.1艇宽(米)10.8 吃水(米)7.66水面排水量(吨)4877 水下排水量(吨)7889储备浮力(%)34 艇体结构双壳舱段数8 艇体材料АК-29钢编制数量99 编制说明军官23名,士兵76名671РТМ围壳↓1——“Скат-КС 鳐-КС”声呐基阵;2——“Анис 茴芹”通信天线;3——“烟幕Завеса”无线电定向仪;4——“Каскад 梯形瀑布”雷达天线;5——通气管装置;6——“柏树Кипарис”通信天线;7——“Залив 海湾-П”电子侦察天线;8——“Синтез 综合”卫导系统升降天线;9——ПЗНГ-10М潜望镜671РТМК围壳↓1——“Скат-2М 鳐-2М”声呐基阵;2——“Кора 树皮”超短波通信天线;3——“烟幕Завеса”无线电定向仪;4——“Каскад 梯形瀑布”雷达天线;5——通气管装置;6——“Анис 茴芹”通信天线;7——“Залив 海湾-П”电子侦察天线;8——“Синтез 综合”卫导系统升降天线;9——ПЗНГ-10М潜望镜;10——水声信号侦察站671РТМ剖视图↓1——“Скат-КС 鳐-КС”主声呐站基阵;2——533毫米鱼雷发射管;3——650毫米鱼雷发射管;4——鱼雷装载舱口;5——鱼雷舱;6——艏救生浮标;7——前舱口;8——备用鱼雷室及快速装填装置;9——备用533毫米鱼雷;10——备用650毫米鱼雷;11——鱼雷无泡发射水舱;12——首纵倾平衡水舱;13——反潜导弹和鱼雷射击指挥仪舱;14——蓄电池;15——主压载水舱;16——居住舱;17——中央指挥舱;18——“Скат-Б 鳐-Б”声呐基阵;19——驾驶台;20——陀螺罗经复示器;21——МТ-70-10电视潜望镜;22——“Синтез 综合”卫导系统升降天线;23——“Залив 海湾-П”电子侦察天线;24——“Альбатрос 信天翁”雷达天线;25——“烟幕Завеса”无线电定向仪;26——“Анис 茴芹”通信天线;27——耐压指挥室;28——中央部位;29——电子设备和声呐室;30——辅机和全艇系统室;31——反应堆舱;32——反应堆及蒸汽发生器、循环泵和屏蔽水箱;33——“Параван 破雷卫”漂浮天线及其绞车;34——轮机舱;35——蒸汽轮机;36——行星齿轮减速器;37——主推力轴承;38——冷凝器;39——高压气瓶;40——电气和辅机设备舱;41——后舱口;42——艉救生浮标;43——生活舱;44——推进电机及舵机舱;45——艉纵倾平衡水舱;46——水平舵传动装置;47——垂直稳定翼;48——“Скат-КС 鳐-КС”拖曳基阵收放装置;49——独立运行的轮机发电机;50——艉水平舵传动装置;51——双螺距螺旋桨(注:可保存原图后放大对照查看)671РТМ侧视图↓671РТМК侧视图↓671РТМ首视图↓671РТМК首视图↓长宽比8.14 海军系数373剖视图↓1——“Енисей 叶尼塞”主声呐站基阵;2——533毫米鱼雷;3——高压空气瓶;4——鱼雷舱;5——备用鱼雷室及快速装填装置;6——“Сарган ;7——蓄电池;8——鱼雷无泡发射水舱;9——首纵倾平衡水舱;10——主压载水舱;11——无线电设备舱;12——高压空气瓶;13——“Енисей 叶尼塞”声呐基阵;14——“Айва 温柏树”通信天线;15——漂浮救生舱;ТВ-1潜望镜;16——“Чибис 凤头麦鸡”雷达天线;17——电子侦察天线;18——“Тополь 白杨”通信天线;19——“Весло-П 桨-П”无线电定向仪;20——指挥舱;21——指挥室;22——居住、医疗和卫生舱室;23——会议室和餐厅;24——反应堆舱;25——反应堆及蒸汽发生器、循环泵和屏蔽水箱;26——救生浮标;27——轮机舱;28——汽轮机减速器;29——第6舱(海水淡化装置和舵传动装置);30——艉舱口;31——轴系;32——燃油舱;33——海水淡化装置;34——艉纵倾平衡水舱;35——艉水平舵传动装置;36——垂直稳定翼(注:可保存原图后放大对照查看)首视图↓围壳↓1——“Весло-П 桨-П”无线电定向仪;2——“Тополь 白杨”通信天线;3——“Чибис 凤头麦鸡”雷达天线;4——潜望镜;5——通气管装置及“Айва 温柏树”通信天线Alfa俄罗斯攻击核潜艇图解同级舰资料返回首页型号705К中文名称阿尔法总体同级艇数量 6 艇长(米)79.6艇宽(米)10 吃水(米)7.6水面排水量(吨)2280 水下排水量(吨)3180储备浮力(%)37 艇体结构双壳舱段数 6 艇体材料48-ОТ3钛合金编制数量23动力动力装置ОК-550 核反应堆БМ-40А型液体金属冷却型反应堆×1反应堆功率(兆瓦)155 推进主机ОК-7К型汽轮机×1主机功率(马力)40000 涡轮发电机涡轮发电机×2涡轮发电机功率(马力) 4082 辅助推进发动机ПГ-118型×2辅推功率(马力)270 柴油发电机М-850型柴油发电机×1 柴油发电机功率(马力)680 蓄电池银锌蓄电池×1组112块推进器五叶螺旋桨×1 水下航速(节)41水面航速(节)14 自持力(天)50最大潜深(米)420 安全潜深(米)3505-200赫兹噪声(分贝) 163 1000赫兹噪声(分贝)143武备鱼雷САЭТ-60 鱼雷САЭТ-65鱼雷发射装置533毫米气动液压式发射管×6武器携载数12电子设备雷达Чибис 凤头麦鸡导航设备Сож 索日综合声呐МГК-1001 Енисей 叶尼塞通信设备Молния 闪电作战指控系统МВУ-III Аккорд 和弦作战情报指挥系统,Сарган 沙尔岗型鱼雷发射指挥装置船型参数长宽比7.96 海军系数373双视图↓Mike俄罗斯攻击核潜艇图解同级舰资料返回首页型号685 中文名称麦克总体同级艇数量 1 艇长(米)118.4艇宽(米)11.1 吃水(米)7.3水面排水量(吨)5880 水下排水量(吨) 8500储备浮力(%)36 艇体结构双壳舱段数7 艇体材料48-ОТ3钛合金编制数量64 编制说明军官30名,士官26名,士兵8名动力动力装置ОК-650Б-3 核反应堆压水堆×1反应堆功率(兆瓦)190 推进主机ОК-300型汽轮机×1 主机功率(马力)43000 涡轮发电机ОК-2型涡轮发电机×2 涡轮发电机功率(马力) 5400 辅助推进发动机辅推电机×2辅推功率(马力)816 柴油发电机ДГ-500型型柴油发电机×1柴油发电机功率(马力) 680 蓄电池银锌蓄电池×1组112块推进器七叶螺旋桨×1 水下航速(节)30.6水面航速(节)14.6 自持力(天)90最大潜深(米)1250 安全潜深(米)1000武备巡航导弹РК-55 石榴石鱼雷САЭТ-60М鱼雷ВА-111 暴风鱼雷发射装置533毫米气动液压式发射管×6武器携载数22 电子设备雷达Чибис 凤头麦鸡导航设备Медведица-685 牡熊星座-685电子侦察БУХТА 海湾综合声呐МГК-305 Скат 鳐通信设备Молния-Л 闪电-Л作战指控系统Омнибус 公共马车型作战情报指挥系统船型参数长宽比10.67 海军系数278双视图↓侧视图↓Sierra I俄罗斯攻击核潜艇图解同级舰资料返回首页型号945 中文名称塞拉1总体同级艇数量 2 艇长(米)107.2艇宽(米)12.3 吃水(米)9.6水面排水量(吨)5940 水下排水量(吨)9600储备浮力(%)30.1 艇体结构双壳舱段数 6 艇体材料48-ОТ3钛合金编制数量61 编制说明士官31名动力动力装置ОК-650А核反应堆压水堆×1反应堆功率(兆瓦)190 推进主机ОК-300型汽轮机×1主机功率(马力)43000 涡轮发电机ОК-2型涡轮发电机×2 涡轮发电机功率(马力) 5400 辅助推进发动机辅推电机×2辅推功率(马力)1000 柴油发电机ДГ-300型柴油发电机×2 柴油发电机功率(马力)1360 蓄电池426-II型×1组112块推进器七叶大侧斜螺旋桨×1 水下航速(节)35.2水面航速(节)12.1 自持力(天)100最大潜深(米)550 安全潜深(米)4805-200赫兹噪声(分贝) 140 1000赫兹噪声(分贝)120武备反潜导弹86Р 瀑布反潜导弹88Р 风巡航导弹РК-55 石榴石鱼雷ТЭСТ-71鱼雷УСЭТ-80 鱼雷ВА-111 暴风鱼雷发射装置533毫米气动液压式发射管×4武器携载数32鱼雷65-76 鱼雷发射装置650毫米气动液压式发射管×2武器携载数8电子设备雷达МРКП-58 Радиан 弧度导航设备Симфония 交响乐电子侦察МРП-21А Залив 海湾-П综合声呐МГК-503 Скат-КС 鳐-КС通信设备Молния-МЦ 闪电-МЦ搜索潜望镜Кутум 库图姆攻击潜望镜Лебедь-21 天鹅-21作战指控系统Омнибус 公共马车型作战情报指挥系统船型参数长宽比8.72 海军系数458侧视图↓首视图↓围壳和垂尾↓1——“Скат-КС 鳐-КС”声呐拖曳部分收放装置导流罩;2——试验用水声信号侦察站导流罩;3——“烟幕Завеса”无线电定向仪;4——“Синтез 综合”卫导系统升降天线;5——МРКП-58“Радиан 弧度”雷达天线;6——“Кора 树皮”超短波通信天线;7——“Кутум 库图姆”潜望镜;8——“Лебедь-21 天鹅-21”潜望镜Sierra II俄罗斯攻击核潜艇图解同级舰资料返回首页型号945A 中文名称塞拉2总体同级艇数量 2 艇长(米)110.6艇宽(米)12.3 吃水(米)11.7水面排水量(吨)6466 水下排水量(吨)10412储备浮力(%)34 艇体结构双壳舱段数7 艇体材料48-ОТ3钛合金双视图↓Akula I俄罗斯攻击核潜艇图解同级舰资料返回首页型号971 中文名称鲨鱼1总体同级艇数量9 艇长(米)107.2艇宽(米)13.6 吃水(米)9.7水面排水量(吨)8140 水下排水量(吨)12120储备浮力(%)30.1 艇体结构双壳舱段数7 艇体材料高强度钢编制数量73 编制说明士官33名剖视图↓纵剖面图↓首视图↓围壳↓Akula II俄罗斯攻击核潜艇图解同级舰资料返回首页型号971У/А/М中文名称鲨鱼2总体同级艇数量8 艇长(米)110.2艇宽(米)13.6 吃水(米)13.8水面排水量(吨)8632 水下排水量(吨)12770储备浮力(%)34 艇体结构双壳双视图↓侧视图↓侧视图↓剖视图↓Echo I俄罗斯巡航导弹核潜艇图解同级舰资料返回首页型号659/659Т中文名称回声1总体同级艇数量 6 艇长(米)111.2艇宽(米)9.2 吃水(米)7.1水面排水量(吨) 3730 水下排水量(吨)4920储备浮力(%)32 艇体结构双壳舱段数10 艇体材料АК-25钢编制数量104 编制说明士官24名动力核反应堆ВМ-А型压水堆×2 反应堆功率(兆瓦)140 推进主机ГТЗА-601型汽轮机×2 主机功率(马力)35000 涡轮发电机ГПМ-21汽轮发电机×2 涡轮发电机功率(马力) 3810 辅助推进发动机ПГ-116型×2 辅推功率(马力)900 柴油发电机ПГ-117型柴油发电机×2 柴油发电机功率(马力) 1280蓄电池28-СМ型铅酸蓄电池×2组112块推进器变距螺旋桨×2水下航速(节)26 水面航速(节)15.1续航力(海里/节) 31000/26 自持力(天)50最大潜深(米)370 安全潜深(米)300武备巡航导弹П-5Д×6鱼雷СЭТ-65鱼雷53-61 鱼雷发射装置533毫米气压发射管×4 武器携载数 4 鱼雷МГТ-1鱼雷发射装置400毫米气压发射管×4 武器携载数12电子设备雷达РЛК-101 Альбатрос 信天翁导航设备力量Сила Н-659电子侦察Накат综合声呐МГ-200 Арктика-М 北极测距声呐МГ-10船型参数长宽比12.09 海军系数145三视图↓剖视图↓Echo II俄罗斯巡航导弹核潜艇图解同级舰资料返回首页型号675 中文名称回声2总体同级艇数量15 艇长(米)115.4艇宽(米)9.3 吃水(米)7.9水面排水量(吨) 4450 水下排水量(吨)5650储备浮力(%)27 艇体结构双壳舱段数10 艇体材料АК-25钢编制数量104动力核反应堆ВМ-А型压水堆×2 反应堆功率(兆瓦)140推进主机60-Д1型汽轮机×2 主机功率(马力)35000涡轮发电机ГПМ-21汽轮发电机×2 涡轮发电机功率(马力) 3810辅助推进发动机ПГ-116型×2 辅推功率(马力)900柴油发电机ДГ-400型柴油发电机×2 柴油发电机功率(马力) 1088蓄电池38-СМ型铅酸蓄电池×2组112块推进器变距螺旋桨×2水下航速(节)23 水面航速(节)14自持力(天)90 最大潜深(米)370安全潜深(米)300武备巡航导弹П-6×8 鱼雷53-65М鱼雷53-65К鱼雷发射装置533毫米气压发射管×4 武器携载数 4 鱼雷СЭТ-72鱼雷发射装置400毫米气压发射管×2 武器携载数 6电子设备雷达РЛК-101 Альбатрос 信天翁雷达Аргумент 自变量导航设备力量Сила Н-675 电子侦察Накат-М综合声呐МГК-100 Керчь 刻赤通信设备Молния 闪电搜索潜望镜ПЗНГ-10 攻击潜望镜ПР-14作战指控系统拉多加Ладога型鱼雷射击指挥仪,成功型目标指示系统船型参数长宽比12.41 海军系数110双视图↓剖视图↓Echo II俄罗斯巡航导弹核潜艇图解同级舰资料返回首页型号675МК中文名称回声2总体同级艇数量9 艇长(米)115.4艇宽(米)9.3 吃水(米)7.9水面排水量(吨) 5090 水下排水量(吨)6500储备浮力(%)28 艇体结构双壳舱段数10 艇体材料АК-25钢编制数量107动力核反应堆ВМ-А型压水堆×2 反应堆功率(兆瓦)140推进主机60-Д1型汽轮机×2 主机功率(马力)35000涡轮发电机ГПМ-21汽轮发电机×2 涡轮发电机功率(马力) 3810辅助推进发动机ПГ-116型×2 辅推功率(马力)900柴油发电机ДГ-400型柴油发电机×2 柴油发电机功率(马力) 1088蓄电池38-СМ型铅酸蓄电池×2组112块推进器变距螺旋桨×2水下航速(节)23 水面航速(节)14自持力(天)90 最大潜深(米)370安全潜深(米)300武备巡航导弹П-500 玄武岩×8 鱼雷53-65М鱼雷53-65К鱼雷发射装置533毫米气压发射管×4 武器携载数 4 鱼雷СЭТ-72鱼雷发射装置400毫米气压发射管×2 武器携载数 6电子设备雷达РЛК-101 Альбатрос 信天翁雷达Аргон 氩-К导航设备力量Сила Н-675 电子侦察Накат-М综合声呐МГК-100 Керчь 刻赤通信设备Молния 闪电搜索潜望镜ПЗНГ-10 攻击潜望镜ПР-14作战指控系统拉多加Ладога型鱼雷射击指挥仪,Касатка-Б 燕子-Б型目标指示系统船型参数长宽比12.41 海军系数121水线图↓Echo II俄罗斯巡航导弹核潜艇图解同级舰资料返回首页型号675МКВ中文名称回声2总体同级艇数量 5 艇长(米)115.4艇宽(米)9.3 吃水(米)7.9水面排水量(吨)5375 水下排水量(吨)6810储备浮力(%)28 艇体结构双壳舱段数10 艇体材料АК-25钢编制数量112动力核反应堆ВМ-А型压水堆×2 反应堆功率(兆瓦)140推进主机ГТЗА型汽轮机×2 主机功率(马力)35000涡轮发电机ГПМ-21汽轮发电机×2 涡轮发电机功率(马力) 3810辅助推进发动机ПГ-116型×2 辅推功率(马力)900柴油发电机ДГ-400型柴油发电机×2 柴油发电机功率(马力) 1088蓄电池38-СМ型铅酸蓄电池×2组112块推进器变距螺旋桨×2水下航速(节)22 水面航速(节)14 自持力(天)90 最大潜深(米)370 安全潜深(米)300武备巡航导弹П-1000 火山×8 防空导弹箭-3М×18鱼雷53-65М鱼雷53-65К鱼雷发射装置533毫米气压发射管×4 武器携载数 4鱼雷СЭТ-72 鱼雷发射装置400毫米气压发射管×2 武器携载数 6电子设备雷达РЛК-101 Альбатрос 信天翁雷达Аргон 氩-КВ导航设备力量Сила Н-675 电子侦察Накат-М综合声呐МГК-100 Керчь 刻赤通信设备Молния 闪电搜索潜望镜ПЗНГ-10 攻击潜望镜ПР-14作战指控系统拉多加Ладога型鱼雷射击指挥仪,Касатка-Б 燕子-Б型目标指示系统船型参数长宽比12.41 海军系数109双视图↓Yankee Notch俄罗斯巡航导弹核潜艇图解同级舰资料返回首页型号667АТ中文名称扬基-缺口总体同级艇数量 3 艇长(米)141.7艇宽(米)12.8 吃水(米)7.8水面排水量(吨)8935 水下排水量(吨) 11400储备浮力(%)28.7 艇体结构双壳舱段数10 艇体材料АК-29钢编制数量121动力动力装置ОК-700 核反应堆ВМ-2-4型压水堆×2反应堆功率(兆瓦)180 推进主机ГТЗА型汽轮机×2主机功率(马力)40000 涡轮发电机汽轮发电机×2涡轮发电机功率(马力) 8160 辅助推进发动机辅推电机×2辅推功率(马力)612 柴油发电机柴油发电机×2柴油发电机功率(马力) 1250 蓄电池铅酸蓄电池×2组112块推进器七叶螺旋桨×2 水下航速(节)27水面航速(节)16.5 自持力(天)70最大潜深(米)400 安全潜深(米)320武备巡航导弹РК-55 石榴石×32 鱼雷СЭТ-65鱼雷53-65К鱼雷САЭТ-60鱼雷发射装置533毫米气压发射管×14 武器携载数14电子设备雷达МРК-57 Корма雷达РЛК-101 Альбатрос 信天翁导航设备Тобол-АТ 托鲍尔-АТ,Шлюз АДК-ЗМ 闸门型卫星导航系统电子侦察МРП-21А Залив-П综合声呐МГК-400 Рубикон 卢比康通信设备Молния-ЛМ 1 闪电-ЛМ 1搜索潜望镜ПЗНГ-8М攻击潜望镜ПЗНС-8 作战指控系统Омнибус-АТ 公共马车-АТ型作战情报指挥系统船型参数长宽比11.07 海军系数249剖视图↓双视图↓围壳↓Papa俄罗斯巡航导弹核潜艇图解同级舰资料返回首页型号661总体同级艇数量 1 艇长(米)106.9艇宽(米)11.5 吃水(米)8.1水面排水量(吨) 5197 水下排水量(吨)7000储备浮力(%)34.7 艇体结构双壳舱段数9 艇体材料48-ОТ3钛合金编制数量80动力核反应堆В-5Р型压水堆×2 反应堆功率(兆瓦) 354.8 推进主机ГТЗА-618 汽轮机×2 主机功率(马力)80000涡轮发电机ОК-3型汽轮发电机×2 涡轮发电机功率(马力)8160蓄电池424-III型×2组152块推进器变距螺旋桨×2水下航速(节)44.7 水面航速(节)19自持力(天)70 最大潜深(米)400武备巡航导弹П-40 紫晶石×10 鱼雷发射装置533毫米气压发射管×4 武器携载数12电子设备雷达МТП-10 雷达Призма 棱镜导航设备Сигма-661 西格玛661 综合声呐МГК-300 Рубин 红宝石探雷声呐МГК-509 Радиан-1 弧度攻击潜望镜ПЗНС-9敌我识别镍铬合金作战指控系统Брест 勃列斯特型作战情报指挥系统,拉多加Ладога-П-661型鱼雷发射指挥装置船型参数长宽比9.30 海军系数409双视图↓剖视图↓彩色侧视图↓Charlie I俄罗斯巡航导弹核潜艇图解同级舰资料返回首页型号670 中文名称查理1总体同级艇数量11 艇长(米)95.5艇宽(米)9.9 吃水(米)7.5水面排水量(吨)3574 水下排水量(吨) 4560储备浮力(%)27.6 艇体结构混合结构舱段数7 艇体材料АК-29钢编制数量102动力动力装置ОК-350 核反应堆ВМ-4-1压水堆×2反应堆功率(兆瓦)89 推进主机ГТЗА汽轮机×1主机功率(马力)18800 涡轮发电机ОК-2型涡轮发电机×2 涡轮发电机功率(马力) 5400 辅助推进发动机辅推电机×2辅推功率(马力)500 柴油发电机ДГ型柴油发电机×1柴油发电机功率(马力) 680 蓄电池28-СМ1型×2组112块推进器五叶变距螺旋桨×1 水下航速(节)26水面航速(节)12 自持力(天)60最大潜深(米)300 安全潜深(米)240武备巡航导弹П-40 紫晶石×8 鱼雷СЭТ-65鱼雷САЭТ-60М鱼雷发射装置533毫米气压发射管×4 武器携载数14电子设备雷达РЛК-101 Альбатрос 信天翁导航设备Сигма-670 西格玛670电子侦察МРП-21А Залив 海湾-П综合声呐МГК-100 Керчь-670 刻赤通信设备Молния 闪电搜索潜望镜ПЗНГ-10作战指控系统Брест 勃列斯特型作战情报指挥系统,拉多加Ладога-П-670型鱼雷发射指挥装置船型参数长宽比9.65 海军系数257双视图↓剖视图↓Charlie II俄罗斯巡航导弹核潜艇图解同级舰资料返回首页型号670М中文名称查理2总体同级艇数量 6 艇长(米)104.5艇宽(米)10 吃水(米) 6.9水面排水量(吨)4300 水下排水量(吨) 5350储备浮力(%)24.4 艇体结构混合结构舱段数8 艇体材料АК-29钢编制数量90动力动力装置ОК-350 核反应堆ВМ-4-1压水堆×2反应堆功率(兆瓦)89 推进主机ГТЗА汽轮机×1主机功率(马力)18800 涡轮发电机ОК-2型涡轮发电机×2 涡轮发电机功率(马力) 5400 辅助推进发动机辅推电机×2辅推功率(马力)500 柴油发电机ДГ型柴油发电机×1。
国际军警保安器材展轻武器精选(Ⅲ)
国际军警保安器材展轻武器精选(Ⅲ)
康平;邢筱莹
【期刊名称】《轻兵器》
【年(卷),期】2010(000)008
【总页数】4页(P6-9)
【作者】康平;邢筱莹
【作者单位】
【正文语种】中文
【相关文献】
1.纺织器材的现状和发展——第二届中国(上海)国际纺织器材展记述
2.展后报告--第四届国际医疗展--医院、制药、医疗康复设备器材及用品展览会
3.摄影器材:传统与现代的交汇:‘98中国国际摄影器材展巡礼
4.别具风情的影像摄影器材展——“2007中国国际影像和摄影器材展览会”现场掠影
5.雅马哈亮相法国巴黎国际军警设备展
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Hydraulic Pressure
11
© Copyright 2009
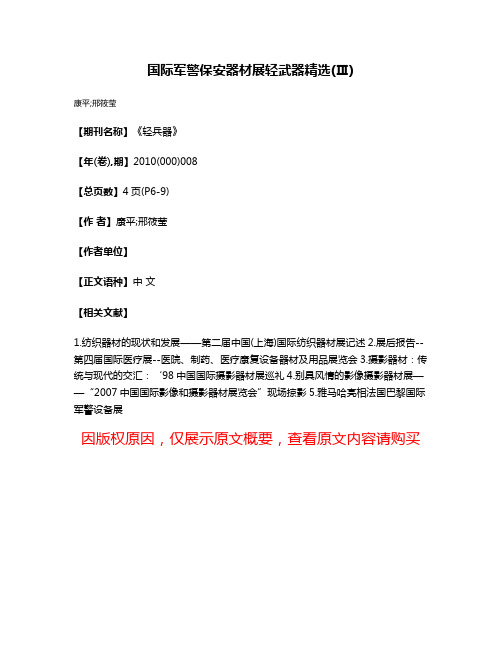
ISC Actuator, Valve and Plunger 无级控制阀动器,气阀和柱塞
PORT A (Tank) 端口A(罐) COMPRESSOR LOADED 压缩机加载 PORT B (Pump) 端口B(泵) PORT A (Pump)端口A(罐) COMPRESSOR UNLOADED 压缩机卸载 PORT B (Tank)端口B(泵)
Port A端口 A Port B端口 B
Hydraulic Seal 液压密封 Wiper 刮油环 Gas Seal 气体密封
Drain 排放口 Gas Vent 气体出口
10
© Copyright 2009
ISC Actuator, Valve and Plunger 无级控制阀动器,气阀和柱塞
12
© Copyright 2009
MAGNUMTM Valve and Plunger MAGNUMTM气阀和柱塞
13
© Copyright 2009
ISC - Servo and Actuators 无级控制- 伺服器和阀动器
Test Lab Installation 实验室安装
Sest ISC system has been installed at Port Arthur TX and will be operating in April. 最近的一套安装在德州西部的石化工业小镇Port Arthur ,将于4月份投入运行 Existing units in field: 35 units of the original (mechanical) ISC (installed between 1960-1975) 现有安装:35套原始设计(机械控制)的ISC(安装于1960~1975年) 5 units of the original updated with ServoValves (installed between 1999-2003). 其中有5套升级成了带伺服器的电子控制ISC(升级时间1999~2003年) 1 unit of the current version of the ISC installed at Praxair in Port Arthur, TX. 1套现在设计型式的ISC安装于德州西部的石化工业小镇Port Arthur 的普莱克斯 公司 3 units to be installed this year at various Praxair facilitiies in United States. 3套于今年安装在美国普莱克斯公司不同的设备上
7
ISC Controller 无级控制控制器
8
© Copyright 2009
ISC Hydraulic Schematic 无级控制液压系统示意图
2 Cylinder Unit 两缸的压缩机
ACTUATOR
NO. 2 CYLINDER
SERVO
CUSTOMER CONNECTION POINT
COMPRESSOR FRAME Oil Pump Drive End End
PIPING BY CUSTOMER
NO. 1 CYLINDER RETURN SUPPLY
CUSTOMER CONNECTION POINT
HYDRAULIC CONSOLE
© Copyright 2009
9
ISC - Actuator Details 无级控制—阀动器详细资料
© Copyright 2009
3
ISC 无级控制
4
© Copyright 2009
Delayed suction valve closing 延迟进气阀的关闭 I-R pioneered ISC 50 years ago 50年前由英格索兰首创 Successful with integral gas engine through the 1970’s but never actively pursued in process market 70年代成功地集成应用于气体发动机,但未积极地在工艺气体市场推行 Installations with mechanical controls: 配套机械控制安装 Gas Transmission Service – 30 气体传输服务 – 30套 Installations with updated electronic controls: 配套升级的电子控制安装 Gas Transmission Service – 5 气体传输服务 – 5套 Process Service – 1 工艺气体服务 – 1套
5
ISC 无级控制
Scope供货范围:
Included包括: ISC unloaders ISC 卸荷器 Servo Valves 伺服阀 Hoses, Accumulators 软管 储液罐 Hydraulic Power Unit 液压系统 Control Panel (Stand Alone with Touch Panel interface) 控制面板(单独的触控 板界面) Not Included 不包括: Header Piping between Power unit and cylinder 液压控制系统与气缸之间的管道 Electrical Conduit and wiring between Control Panel and Servos and Hydraulic Power Unit 控制面板与伺服阀及液压控制单元之间的电线及导管 Installation 安装
Infinite Step Capacity Control for Reciprocating Compressors 往复式压缩机无极容量控制 (Delayed Suction Valve Closing 延迟进气阀的关闭) [Revision: March, 2009] ISC 无极控制
By:
23
© Copyright 2009
info@
© Copyright 2009
© Copyright 2009
This assumes standard materials. Stainless Steel or Special Requirements will increase the cost 材料为标准材料。如采用不锈钢或有其他特殊要求,价格将会相应增加。
14
© Copyright 2009
ISC Actuator Installation 无级控制阀动器的安装
Test Lab Installation 实验室安装
A B
Actuator Drain Vent
© Copyright 2009
15
ISC Controller 无级控制-控制器
18
© Copyright 2009
6
ISC Schematic 无级控制示意图
HOW IT WORKS 它是如何工作的: Cylinder capacity is controlled by delaying the closing of the inlet valves. 通过延迟进气阀的 关闭来控制气缸容 量
© Copyright 2009
HMI (Touch Screen) 人机界面(触屏)
20
© Copyright 2009
HMI (Touch Screen)人机界面(触屏)
21
© Copyright 2009
HMI (Touch Screen)人机界面(触屏)
22
© Copyright 2009
HMI (Touch Screen)人机界面(触屏)
© Copyright 2009
Long life Heavy Duty hydraulic pump unit (40,000 hour bearing life on pump). Rexroth A4 heavy duty pressure compensated pump. 重载液压泵寿命较长(泵的轴承寿命是4万小时),Rexroth A4 重载压力补偿泵
Advatantages versus HydroCOM : 优点(与HydroCOM相比) Simpler installation and set-up. Panel is pre-configured and ready to run. 安装和设置比较简单,控制面板是提前设置好的,随时可以投入运行。 Less electronics installed on the compressor cylinders. 1 servo valve per end of cylinder (Hoerbiger uses a solenoid on each valve) 在压缩机气缸上安装较少的电子元件。气缸的轴端和盖端各有一个伺服阀(贺尔碧格是每个气阀配一个电磁阀) HMI (human machine interface) is standard on the ISC control system. Touch panel is included with the control panel. 在无级控 制系统上配置标准的人机界面,控制面板包含触屏式面板。 Flexible configuration of control system with customer DCS system or existing panel. The ISC controller can accept a 4-20 ma signal or a pressure transmitter input to control the output of the ISC with a pressure set point. We can configure it either way. 控制系统 可与客户的DCS或其它现有的控制面板灵活配置,ISC控制器 可以接收4-20 ma 的信号,也可以接收用压力设置 点控制排气量的的压力变送器输入信号。