起重机超载限制器的设计
起重超载限制器说明书

QCX-2B型起重量限制器使用说明书一、概述:QCX-2B型起重量限制器是QCX-2型仪表改进的一种起重机械安全保护装置,可用于桥吊、门吊等起重机设备上,该装置主要有电阻应变式传感器和电气控制器(俗称二次仪表)两部分组成,具有声光报警并切断起重机起升回路电源和数字显示重量等功能。
它是根据GB6067.1-2011《起重机械安全规程》和GB/T3811-2008《起重机设计规范》要求设计而成的,通过大量试验及工业运行证明,该产品能符合实际使用要求,各项技术指标优于《GBl2602-90》的安全技术规范,深受广大用户欢迎。
该产品于1989年11月通过国家机电部和劳动部的技术鉴定,1990年获江苏省和劳动部优质产品称号,1991年全国行业评比中名列第一,并荣获国优产品称号。
本企业于1998年12月通过ISO9001质量体系认证。
二、技术指标:1.适用范围:3.2~500t桥门式起重机2.动作误差:≤±3%(F.S)3. 综合显示误差:≤土5%(F.S)4.报警点的设定:①预报警点:额定起重量的90%②延时报警点:额定起重量的110%③立即报警点:额定起重量的130%5.延时报警时间:1~2秒6.传感器过载能力:1.5倍7.使用环境条件: -20℃~+60℃、90%RH8.电源电压:~220V±10% 50Hz(如用其他电源电压,用户订货时需注明)- 1 -9.继电器触点容量:~220V/380V 10A10.传感器防护等级:IP6511.电气控制箱防护等级:IP42三、工作原理:工作原理框图见图1,起重机的载荷由电阻应变式称重传感器检测,当起重机起吊物体后,传感器受压产生与载荷成比例的电压信号,完成重量/电压转换。
图1.原理框图传感器输出信号由二级集成运放器进行放大,放大后的信号送入四比较器,其中三个彼此独立的比较器分别与不同的基准电压比较,其基准分别设定在额定值的90%、110%、130%。
机械毕业设计10450t桥式起重机小车运行机构及超载限制器设计
毕业论文50t桥式起重机小车运行机构及超载限制器设计作者姓名指导导师姓名毕业班级学科类别工学学科专业名称论文提交日期答辩委员会成员评阅人2007年6毕业设计(论文)任务书毕业设计论文题目:50t桥式起重机小车运行机构毕业设计论文内容: 1.传动方案选择2.起重机力能参数计算3.常用标准件选择计算4.主要零件疲劳强度计算5.编写设计说明书毕业设计论文专题部分:起重机小车超载限制器设计指导教师:签字年月日教研室主任:签字年月日系主任:签字年月日毕业设计论文评语指导教师评语:成绩:指导教师:(签字)年月日评阅人评语:成绩:指导教师:(签字)年月日摘要桥式起重机运行小车中最主要的结构有:电动机,减速器,联轴器,等等。
桥式起重机的小车设有起升机构和小车运行机构,为使小车轮压呈均匀分布,应对小车的机构布置进行优化设计,以知小车轨迹和轴矩为例,以车轮轮压均匀分配为目标函数,按单钩起重小车的条件提出约束条件,对优化设计的结果进行分析如下:首先,电动机——起重机械的驱动电动机要根据所需功率、最大转矩、接电持续率、起动等级、控制类型、速度变化范围、供点方式、保护等级、环境温度与使用地区海拔高度等因素进行选择。
其次,减速器——起重机械设计时,根据理论指导和工作经验,对机构形式、中心距、公称传动比及齿轮参数的选择应遵守原则和注意事项。
再次,联轴器——起升机构装有联轴器,其电动机工况驱动力矩,起升过程,减速传动装置的载荷等,与电动机通过减速器直接驱动的起重运行机构有差别,本文根据在MH葫芦桥式起重机系列设计中的应用的经验,提出了把联轴器传动与起重机机构设计相结合的设计计算方法,其设计计算结果在该系列试验中得到证实。
关键词起重小车、机构布置、优化设计、电动机选择、减速器、设计原则、联轴器.AbstractThe most of structure of conuey uehicle,which of the crane of bridge is this :genertor、cushion、coupting.Trolley of overhead traveling crane comprises lifting and traversing mechanisms .Optimization method is applied to the layout design of mechanisms on trolley in order to maintain an even distribution of optimization design on an example a trolley with given wheel base and track gauge ,using even distribution of wheel loads as an objective funtion and condition of a signle hook lifting trolley as restrictive condition The driving motor an electric cane has to be selected according to the required power、maximum torque 、dutyfator 、startup frequency 、type of control 、range of speed rariation 、method of power supply 、class of protection 、ambient temperature and elevation oversee level at the vacation of use .Based on theoretical and practical experience ,this paper presents the principles and attentions for selecting and designing of the structure ,center distance ,nominal transmission ratio and gear parameters when designing the reducers for cranes .Crane traveling mechanism equipped with hydraulic coupling is quite different from ordinary one so far as the working condition of motor .Driving moment,starting process load applied to reducer etc ,Based upon the experience of application to the series of MH type gantry crane with electric hoist as lifting mechanism ,this paper gives calculation method ,which combines the design of hydraulic transmission with the design of crane traveling mechanism .The calculation result is successfully proved by the test of proto types .Key words :Trolley of overhead traveling craneSelection of electric motor for lifting machineryRedueer Design PrincipleHydraulic coupling绪论起重运输机械主要用于装卸和搬运物料。
邵阳学院毕业设计(论文)

致谢
感谢在论文设计期间,老师和同学对我的帮助 ,同时也感谢负责答辩的老师,利用宝贵的时间听 我的陈述。临近毕业,就要与老师们分开了,而仍 然有很多的知识要向老师学习,但以前老师教我的 知识已让我终身受益。最后预祝老师们工作顺利, 桃李满天下。谢谢。 马晓伟
额定值90%~105% 正常显示 黄灯亮 不报警 大于额定值105% 红灯亮 声光报警
2 系统基本结构
• 2.1方案论证
工业控制计算机解决方案与以8位或16位高性 能的单片机为控制核心做比较。 8051与80C51比较 完全兼容,80C51较先进。 。 AD转换模块 MC14433与ADS5422比较 与 优点:精度高、抗干扰性能好,是目前较先进 的一款AD转换芯片。 显示器的选择 LCD与LED比较
• 国内比较有影响的有以下产品: 三峡大学电子厂生产的超载限制器。 湖北宜昌市鸿阳自动化控制有限公司的HY系列 起重机超载限制器。 深圳市测力佳控制技术有限公司HDC型超载限制 器是自行研制的产品。 北京起重机器厂的BQL系列超载限制器。 BQL 普遍问题可靠性不强。基本具有了人机界面与 液晶显示等功能,但体积大,参数设计复杂。
• 1.2 课题主要研究内容
设计的超载限制器的显示器可随时根据起吊物 重是否超重来显示预警的黄灯和报警的红灯,有预 报警、超限报警和超限控制功能。 主要工作 (1)总体方案的研究 (2)系统硬件电路的设计 (3)系统软件的设计 (4)仿真试验
• 需要解决的问题 (1)优良的人机界面 (2)超载限制器的参数指标 额定值 90%以内 正常显示 不报警
超载限制器控制盒
4系统软件
• • • • • • • • 软件设计主要包括: 初始化程序 数据采集子程序 自重值显示 采集毛重(实际物重=毛重-自重) 判断是否报警或预警 中断服务 显示子程序
太重超载限制器说明书(YCTA-50t)8953太重1

号起重机械超载限制器使用说明书Operating Instruction北京首昌衡器有限公司B E I J I N G S H O UC H A N G S C A LE C O.,LT D超载限制器使用说明书目录一、系统概述2二、主要性能参数3三、工作原理4四、安装调试5五、维护及保养6六、售后服务6七、注意事项6一、系统概述起重机械超载保护器,是根据国家标准GB12602-90《起重机械超载保护装置安全技术规范》的规定设计制造,专用于防止起重设备在超载状态下运行的一种安全保护装置。
该系统由称重传感器、接线盒、控制仪表部分组成,具有声光报警、数字显示起重重量、切断起重机械提升电路电源回路等功能。
该系统能在起重设备起吊、振动等各种复杂的情况下,直接显示被测荷重,提供准确报警信号。
超载时,开关电路工作,继电器动作,切断提升电路电源回路,实现超载自动保护。
具有安全、准确、可靠、通用性好等特点。
特点:➢在起重机械提升重物、振动等各种复杂的情况下,准确显示被提升物重量,提供准确有报警信号及断电信号、切断起重机械控制电路,实现起重机械超载自动保护➢重心补正功能:可满足限制器需要重心补正的要求➢编程由设定键盘完成,数字定标➢相同的灵敏度,便于互换二、主要性能参数1.系统精度:5%2.DBC-110仪表技术指标:2.1 产品规格✧型号: DBC-110✧显示: 6位荧光数字显示✧显示分度: 1、2、5✧报警指示: 红色指示灯、文字指示✧报警音响: 蜂鸣器2.2模拟输入✧输入范围: 0-23mV✧输入滤波: 3级有源滤波✧灵敏度: 最小分辨率0.4 μV /分度2.3 A/D特性✧转换方式: △-∑✧转换速率: 100次/秒✧显示速率: 10次/秒2.4 传感器供桥✧供桥电压:DC10V✧最大电流:150 mA2.5 精度和稳定性✧非线性:优于0.5%✧综合误差:小于0.5%✧长期漂移:对于固定增益和初始固定载荷每年在满量程的0.1之内✧零点漂移:满量程的±2%之内2.6 继电器输出✧输出路数:3路✧触点容量:250V 3A✧触点形式:干接点✧输出形式:常开、常闭可选2.7 工作条件✧工作电源:AC220V±10% 20VA✧工作温度:-10℃至+70℃✧工作湿度:45% 至85%RH(无凝露)✧储存温度: -20℃至+80℃✧3. 传感器的技术参数:三、工作原理当传感器受力后,提升的重量经传感器转换成模拟电信号,然后图一工作原理方框图经接线盒传至DBC-110仪表,经仪表完成模-数转换,数据处理,在仪表上显示出重量信号,同时另一路信号经仪表内部的微处理器与设定的基准值进行比较,产生满载报警、超载控制信号,从而切断起重设备的上升回路电源,实现超载限制功能。
智能起重机超载限制器设计
仪 器 仪 表 与 检 测 技 术
Isr n tume a i n nt t on a d Me u e n t as r m e
《 自动化技术 与应 用》2 0 0 7年第 2 6卷第 2期
{) 1 变送器
重量 进行报读 , 同时当起重机处于报警或者动作状态是 , 报 语音 读可 以 醒操作者当前的状态 , 系统操作更加智能和人性化。 提 使 e数据存储是将每次的重量值都存放到外部EP 0 6K . 2R M( 4 字节 ) 这样 即可保存 数据 , , 也可防止停断 电时数据丢失 。 这里 我们 选用2A 52 4 A 1芯片来记录数据 , 由于该芯片是 串口的 , 这样
L U a -u, U N S a - n I J oy H A G h o u i j
( hn nvri o T cnlg, uo t n eatet hn 30 0 hn) Wu a U i sy f eh o yA t i D pr n Wu a 40 7 , ia e t o mao m , C
维普资讯
智 能起 重机 超 载 限制器 设计
刘 教 瑜 。 黄 少 军
( 武汉理工大学 自 动化学 院,湖北 武汉 407) 300
摘
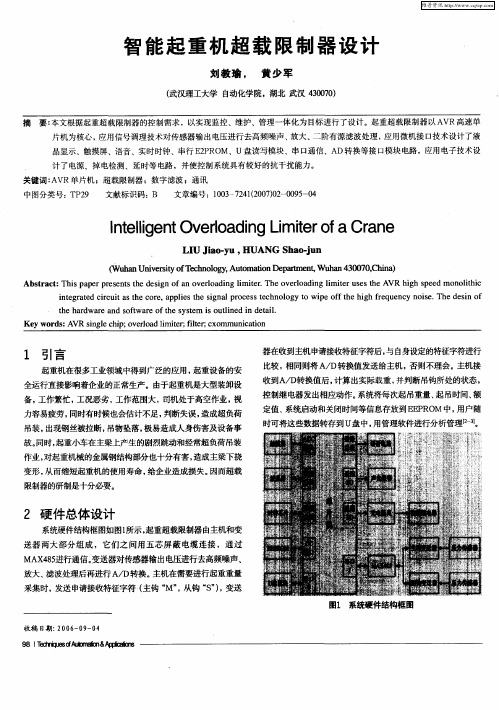
要: 本文根据起重超载 限制器的控制需求 ,以实现监控 、维护、管理 一体化为 目标 进行 了设计 。起重超载 限制器 以AVR高速单
关键 词 : R单 片机 ;超载限制器 ;数字滤波 ;通讯 AV 中图分类号 :T 2 P9 文献标识码 :B 文章编号 :10 — 2 1 0 70 -09 - 4 0 3 7 4 ( 0 )2 0 5 0 2
It l e t e la igLmi r f a e nel n i g Ov r dn i t Crn o eoa
桥、门式起重机超载限制器的精度及安装位置分析
G 6.—2 1 起重机械安 全规程》 中规定 : B6 7 1 O0《 0
大 于 2 的桥 式起 重 机 、大 于 1 的 门式 起 重 机 0t 0t 应 安装 超 载 限制 器 ,其 他 吨位 的桥 、 门式 起 重 机 以及 电动葫 芦单梁 或双 梁起 重机宜 装超 载限制 器 。
或偏心轮或弹簧上 , 进而使它们控制电器开关 。机 械式起重量限制器简单可靠 ,价格便宜 ,但笨重、 精度低 ,现阶段桥、门式起重机上已很少用。 相 比之下 电 子 式 的 起 重 量 限制 器 体 积 小 ,精
度 高 ,并 能 同步 显 示 吊 物重 量 , 目前 ,已 被 大 规 模运 用 到 桥 、门 式 起 重 机 上 ,用 以 限 制 起 重 量 , 减少 和避 免 超 载 等恶 性 事 故 的发 生 。它 主 要 由载
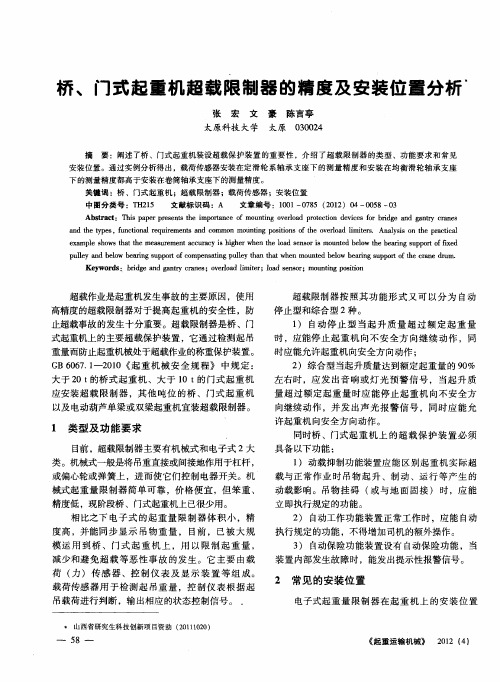
桥 、 门式 起 重机 超 载 限 制器 的精 度 及 安装 位 置 分析
张 宏 文 豪
陈言亭
O0 2 3o4
太原科技 大 学 太 原
摘
要 :阐述 了桥 、门式起重机装设超载保护 装置 的重要 性 ,介绍 了超载 限制器的类 型、功 能要求和 常见
安装 位置。通过实例分析得 出,载荷传感器安装在定滑轮 系轴承支 座下 的测 量精度和 安装在均衡 滑轮轴承 支座 下的测量精度都高于安装在卷筒 轴承支座下 的测量精度 。 关键词 :桥 、门式起重 机 ;超载 限制器 ;载荷传感器 ;安装位 置
中图 分 类 号 :T 25 H 1 文 献 标 识 码 :A 文 章 编 号 :10 0 8 ( 02 4一 o 8— 3 0 1— 7 5 2 1 )0 o5 0
Ab t a t h s p p rp e e t te i o tn e o u t g o e la r tc in d v c s f r b i g n a t rn s s r c :T i a e r s n s h mp r c fmo n i v r d p o e t e i e o r e a d g n r ca e a n o o d y a d t e tp s u c in lrq ie n s a d c mmo u t g p s in ft e o el a i tr .An y i o h r ci a n h y e ,f n t a e ur me t n o o n mo n i o i o s o v r d l e s n t h o mi l a ss n t e p a t l c
葫芦起重机超载限制器技术的应用

计 结 构 相 埘较 差 , 全 感 小 好 而 B Q型 超 载 限制 器 的 传感 器 安 C
限 制 器 发 报 警 声 提 醒 操 作 人 员 注 意 ,并 延 时 2 3 , 制 器 内 继 电器 动 - s限
此无论从 罔家规程要求 , 还足 于生 r 安伞考虑 , ‘ 都应埘在用
的葫 芦 起重 机 加 装 超 载限 制 。 1 一钢 丝绳 ;一传 感 器 ;一控 制 仪表 ;一手 电门 2 3 4 图 1 B Q型 超 载 限 制器 安 装 C
2 超 载 限制器类型 的选择
对本 厂小 加 l 间往 用 I 5×1. 车 D 6 5×9 d电动 单 梁 起 重 机 增 设 起 重量 超载 限 制 器 。本 电动 单 梁 起重 机 额 定起 重 量 为 5, t
D Q型 } C C 亏B Q型 均 分 为 传感 器 和 电气 控 制 仪表 两部 分 。 D Q型 板 环 式 传 感 器 串接 钢 丝 绳 上 , C 一 /— 传 感 器 C D Q 21 5 外 尺 寸 4 5 0×5 , 感 器 I型 挂 板 、 7 ×6 6传 I 限制 器 、 轴 、 销 楔 套 、钢 丝 绳 连 接组 成 , 型挂 l持 在 电 动葫 芦外 壳 楔 槽 上 , u f 反 没
重机 械安 全技 术监察规程 一桥式 起再O } S oo — 0 8必 LT CQ o 2 2 0
起重机超载限制器

起重机超载限制器起重机超载限制器起重机超载限制器,又称为起重机重载保护装置,是一种用于防止起重机超载的安全装置。
它通过对起重机的载荷进行实时监测和控制,能够在起重机达到或超过额定载荷时发出警示,并且会自动采取措施来避免起重机发生超载事故,保护操作人员和设备的安全。
起重机超载限制器的工作原理是基于载荷的测量和比较,它通过将称重传感器放置在起重机的起重机构部位,实时测量起重机的载荷,并与起重机的额定载荷进行比较,从而判断起重机是否超载。
一旦超载发生,超载限制器会通过声光报警等方式发出警示,提醒操作人员及时采取措施,避免危险的发生。
同时,超载限制器还可以通过电气或机械的方式对起重机进行控制,例如制动器、禁用电源等,以阻止起重机继续工作,直到超载问题得到解决为止。
起重机超载限制器广泛应用于各种类型的起重机,包括塔式起重机、桥式起重机、门式起重机、履带式起重机等。
它不仅可以保护起重机自身的安全,还能够预防因超载造成的人身伤害和设备损坏。
在大型工地、港口、船舶等重型起重设备场所,超载限制器的安装和使用更加重要,因为这些场所通常承载的是巨大的载荷和严苛的工作环境,一旦发生超载事故,后果将不堪设想。
起重机超载限制器的选择和安装十分关键。
首先,应根据起重机的类型和工作环境的特点选择适合的超载限制器。
其次,超载限制器的安装位置必须能够准确测量载荷,并且不会因振动、温度变化等因素而产生误差。
此外,超载限制器的性能指标也是选择的重要考虑因素,例如测量范围、精度、响应时间等。
最后,超载限制器的使用和维护要符合相关的安全规范和要求,定期进行检测和校准,以确保其可靠性和稳定性。
总之,起重机超载限制器是起重机安全的重要组成部分,它能够有效避免起重机发生超载事故,保护人员和设备的安全。
在现代工程建设和起重作业中,起重机超载限制器的应用已经成为一项标准的安全要求,它不仅能够提高工作效率,还能够提高工作环境的安全性和可靠性。
因此,我们应该高度重视起重机超载限制器的选择、安装和使用,以确保起重机工作的安全和稳定。
起重超载限制器说明书

QCX-2B型起重量限制器使用说明书一、概述:QCX-2B型起重量限制器是QCX-2型仪表改进的一种起重机械安全保护装置,可用于桥吊、门吊等起重机设备上,该装置主要有电阻应变式传感器和电气控制器(俗称二次仪表)两部分组成,具有声光报警并切断起重机起升回路电源和数字显示重量等功能。
它是根据GB6067.1-2011《起重机械安全规程》和GB/T3811-2008《起重机设计规范》要求设计而成的,通过大量试验及工业运行证明,该产品能符合实际使用要求,各项技术指标优于《GBl2602-90》的安全技术规范,深受广大用户欢迎。
该产品于1989年11月通过国家机电部和劳动部的技术鉴定,1990年获江苏省和劳动部优质产品称号,1991年全国行业评比中名列第一,并荣获国优产品称号。
本企业于1998年12月通过ISO9001质量体系认证。
二、技术指标:1.适用范围:3.2~500t桥门式起重机2.动作误差:≤±3%(F.S)3. 综合显示误差:≤土5%(F.S)4.报警点的设定:①预报警点:额定起重量的90%②延时报警点:额定起重量的110%③立即报警点:额定起重量的130%5.延时报警时间:1~2秒6.传感器过载能力:1.5倍7.使用环境条件: -20℃~+60℃、90%RH8.电源电压:~220V±10% 50Hz(如用其他电源电压,用户订货时需注明)9.继电器触点容量:~220V/380V 10A10.传感器防护等级:IP651页11.电气控制箱防护等级:IP42三、工作原理:工作原理框图见图1,起重机的载荷由电阻应变式称重传感器检测,当起重机起吊物体后,传感器受压产生与载荷成比例的电压信号,完成重量/电压转换。
图1.原理框图传感器输出信号由二级集成运放器进行放大,放大后的信号送入四比较器,其中三个彼此独立的比较器分别与不同的基准电压比较,其基准分别设定在额定值的90%、110%、130%。
起重机超载限制器的设计
起重机超载限制器的设计一.概述本篇文章简要地讲述了起重机限制器的基本构成,并对其基本软硬件进行了简单的介绍。
起重机限制器主要用于对工矿企业和施工现场的起重机,行车进行超载限制。
当它进行工作时,若起重机承受重物在额定值的90%以内,则该限制器能显示重物的实际重量,若重物的重量超过额定值的90%但在105%以内,该限制器显示重物的实际重量的同时发出声光预警信号,若重物的重量达到或超过额定值的105%,该限制器将发出声光报警信号,同时自动切断起重机电源。
该限制器还能自动记录超载的次数,供有关部门检查。
二.系统设计根据上述的工作原理和技术要求,可知该系统实际上是一个典型的数据采集与控制系统,数据采集的对象是一路压力(拉力),故选用压力(拉力)传感器进行物理量的测量,控制对象是断电及报警装置,故选用继电器及声响电路进行断电和报警。
1.硬件设计硬件电路如下图所示,模拟信号放大部分选用运算放大器OP07,A/D转换器选用MC14433,系统主机选用8031单片机,扩充一片程序存储器2716,地址及数据锁存器选用74LS373,4线-7线译码器选用4511,驱动器选用MC1413,基准电压源选用MC1403,数码显示部分选用BS212共阴数码管,音响部分选用一片KD9561。
由电路图可知,硬件系统上电工作后,由压力(拉力)传感器来的微弱电信号(约20uV)经OP07送到MC14433进行A/D转换,MC14433送出的4位8421BCD码及4位选通信号一起送到8031单片机的P1口,8031根据P1口来的信号进行处理判别后送到4511和MC1413译码驱动显示。
若采集到的物重达到或超过额定值的90%,则由P3.0送出低电平驱动声光预警电路。
105%,超载计数单元加1,由P3.1送出低电平,驱动声光报警电路,并由继电器切断起重机电源。
硬件部分还设计了一个掉电保护电路,当8031系统的电源出现意外情况突然下降或消失时,可由掉电保护电路保护8031内存单元中的内容。
25T(40T)门机超负荷限制器
PCI-1002CHR全功能起重机超载限制器工作原理:仪表设置4路独立的测力通道和1路总量叠加通道,每个通道都有单独的显示窗和控制回路。
4路通道分别检测起重机4根钢丝绳上的载荷情况,当任一根钢丝绳上的载荷(偏载)超过允许范围时,该通道即报警并输出触点信号,同时对应的显示窗显示偏载重量。
仪表设置了高度显示窗,当起重机PLC向本仪表输送高度信号时,显示窗上即显示吊钩的实际高度位置。
仪表设置了幅度显示窗,用一个高性能的角度传感器配以仪表的简单操作,在整个幅度范围内准确地显示吊钩所处的水平位置。
总量叠加通道能将4根钢丝绳上的载荷全部叠加起来,当总重量大于额定值的110%时发出声光报警信号,经过几秒(可调整)的延时识别,当确认不是起升过冲而是真正的超载时,仪表输出一对继电器触点信号,切断起重机向不安全方向运行的全部动作。
当总重量大于额定值的125%时,声光报警、仪表内的继电器立即动作,马上切断起重机向不安全方向运行的全部动作,以杜绝挂仓等恶性超载事故!特点:功能:●高可靠设计,使仪表能在恶劣环境中长期工作● 单绳负荷显示、控制●优异的动载适应性● 总负荷显示、控制●清晰的数字显示,使操作人员随时了解起重机● 吊钩高度、幅度显示的载荷及吊钩高度、幅度变化情况● 90%声光预报警●各通道的校准均在面板进行● 110%延时断电●美观实用、便于安装的外型设计● 125%瞬时断电适用机型:本仪表适用于对4根钢丝绳有单独测量控制要求和对吊钩高度位置、幅度位置有显示要求的门座式起重机。
PCI-1022起重机动态记录仪工作原理:PCI-1022起重机动态记录仪是一种记录起重机械运行参数的智能仪器。
当起重机配置该仪器时,装卸运行过程中的作业量、运行台时、耗电量这三项参数都将得到实时记录。
对于起重机械所属的生产管理部门而言,仪器能提供装卸作业量的班累计、日累计、月累计、年累计及总累计。
并能同时提供与前述装卸作业量对应的班、日、月、年、总运行台时及班、日、月、年、总的耗电量。
双梁超载限制器主要技术参数
双梁超载限制器主要技术参数
1.额定载荷能力:双梁超载限制器的额定载荷能力是指该设备能够安
全监测和控制的最大起重载荷。
通常以吨(t)为单位进行标识,例如1t、5t、10t等。
起重机的额定载荷应小于或等于超载限制器的额定载荷能力。
2. 载荷显示精度:载荷显示精度是指超载限制器能够测量和显示的
载荷值的准确度。
通常以百分比或千克为单位进行标识,例如±2%、
±5kg等。
精度越高,载荷显示的准确度越高。
3.触发报警值:触发报警值是指超载限制器设定的触发报警的载荷阈值。
当起重机的实际载荷达到或超过该阈值时,超载限制器会触发警报,
提示操作员降低载荷或采取其他措施。
触发报警值通常由用户根据具体应
用需求进行设定。
4.触发切断值:触发切断值是指超载限制器设定的触发切断电源的载
荷阈值。
当起重机的实际载荷达到或超过该阈值时,超载限制器会切断电源,使起重机停止工作,以保护起重机和工作环境的安全。
触发切断值通
常由用户根据具体应用需求进行设定。
5. 响应时间:响应时间是指超载限制器检测到起重机载荷达到触发
报警或切断的阈值时,所需要的反应时间。
通常以毫秒为单位进行标识,
例如100ms、500ms等。
响应时间越短,超载限制器对起重机载荷的监测
和控制能力越强。
除了以上几个主要技术参数外,双梁超载限制器还可能包括其他功能
和性能指标,例如抗干扰能力、工作温度范围、安装方式等。
这些参数都
会因为不同的产品型号和厂家而有所差异,用户在选择和购买时应根据具
体需求进行合理的选择。
起重机超载限制电路设计_图文

目录第一章绪论 (1)1.1 起重机超载限制器的介绍 (1)1.2 国内外超载限制器的发展 (1)第二章系统硬件设计 (2)2.1系统方框图 (2)2.2系统硬件设计概述 (2)2.3各子电路的简介 (3)2.3.1电源电路 (3)2.3.2 传感器电路 (3)2.3.3 A/D转换电路 (5)2.3.4复位电路及振荡时钟电路 (6)2.4人机通道的设计 (7)2.4.1显示器的设计 (7)2.4.2 键盘的设计 (9)2.4.3 报警电路的设计 (11)2.4.4超载限制器控制盒的设计 (13)第三章系统软件设计 (15)3.1软件设计概述 (14)3.2软件设计构思与软件结构 (14)结论 (29)参考文献 (30)致谢 (32)附录1 起重机超载限制器主电路图附录2 PCB图第一章绪论1.1 起重机超载限制器的介绍起重机超载限制器(Crane Overload Limiter)[2]是一种重要的起重机超载保护装置。
它主要装备在汽车吊、轮胎吊和履带吊等大型起重机上。
通过系统内的传感器对起重机的关键工作参数进行实时检测,经过分析计算和数据处理得到结果并结合起重机的当前工况进行判断:当实际载荷接近起重机的非安全工作范围时,系统预报警。
超过非安全工作范围时,系统报警并自动进行安全保护控制,禁止起重机向危险方向动作。
1.2 国内外超载限制器的发展伴随微电子技术、计算机技术、智能仪表技术及传感器技术的迅速发展,现今起重机用户己不满足于起重机仅仅拥有载荷、超载限制功能,他们希望获得更多关于起重机工作状态的准确信息,包括起升高度、风速、起升角度、工作幅度甚至钢丝绳状况、油温、振动情况等信息,基于上述原因,起重机超载限制器的功能不断得到延伸,信息集成度更高也更加人性化。
国外许多起重机制造商对起重机超载限制器的研究和应用较早,目前已达到较高水平。
我国在这方面的工作起步较晚,技术水平不高,应用范围不广。
但随着社会经济的发展和安全管理意识的提高,国内起重机的制造商和用户对起重机超载限制器产生了很大需求。
起重机超载限制器设计讲诉
起重机超载限制器的设计一.概述本篇文章简要地讲述了起重机限制器的基本构成,并对其基本软硬件进行了简单的介绍。
起重机限制器主要用于对工矿企业和施工现场的起重机,行车进行超载限制。
当它进行工作时,若起重机承受重物在额定值的90%以内,则该限制器能显示重物的实际重量,若重物的重量超过额定值的90%但在105%以内,该限制器显示重物的实际重量的同时发出声光预警信号,若重物的重量达到或超过额定值的105%,该限制器将发出声光报警信号,同时自动切断起重机电源。
该限制器还能自动记录超载的次数,供有关部门检查。
二.系统设计根据上述的工作原理和技术要求,可知该系统实际上是一个典型的数据采集与控制系统,数据采集的对象是一路压力(拉力),故选用压力(拉力)传感器进行物理量的测量,控制对象是断电及报警装置,故选用继电器及声响电路进行断电和报警。
1.硬件设计硬件电路如下图所示,模拟信号放大部分选用运算放大器OP07,A/D转换器选用MC14433,系统主机选用8031单片机,扩充一片程序存储器2716,地址及数据锁存器选用74LS373,4线-7线译码器选用4511,驱动器选用MC1413,基准电压源选用MC1403,数码显示部分选用BS212共阴数码管,音响部分选用一片KD9561。
由电路图可知,硬件系统上电工作后,由压力(拉力)传感器来的微弱电信号(约20uV)经OP07送到MC14433进行A/D转换,MC14433送出的4位8421BCD码及4位选通信号一起送到8031单片机的P1口,8031根据P1口来的信号进行处理判别后送到4511和MC1413译码驱动显示。
若采集到的物重达到或超过额定值的90%,则由P3.0送出低电平驱动声光预警电路。
105%,超载计数单元加1,由P3.1送出低电平,驱动声光报警电路,并由继电器切断起重机电源。
硬件部分还设计了一个掉电保护电路,当8031系统的电源出现意外情况突然下降或消失时,可由掉电保护电路保护8031内存单元中的内容。
起重机械超载保护装置设置及检验
2 起重 机械 超 载保 护装 置使 用 的相 关法律 法 规
1 引言
冶 金 企 业 大 量 使 用 重 负荷 起 重 机 械 ( 俗 称 天 车、 行车 ) 吊运 熔 融 金 属 , 一旦 起 重 机 械 超 载 引发
t e c t o r s o f h o i s t i n g ma c h i n e r y . S u m u p t h e t e s t a n d i n s p e c t i o n i t e ms a n d r e q u i r e me n t s i n t h e u s a g e . P r e s -
重要 的零 部件 。根 据 起 重 机 的不 同类 型 , 起 重 机
防 超 载 的 安 全装 置有 起 重 量 限制 器 、 起 重 力 矩 限
起 重 机械 有 以下 几种 类 型 : 流 动式 起 重 机 、 塔
式起 重机 、 臂架起 重机 、 桥式 和门式起重机 、 缆索 起 重机 、 轻 小 型 起 重设 备 等 。冶 金 企 业 以桥 式 类 型起重机为主。 自2 0 1 4 年1 月1 日 施行的《 中华人 民共 和国特种设备安全法》 是起 重机械安全管理 的法律依据 , 该法第八条规定 了特种设备生产 、 经 营、 检验 、 检 测应 遵 守 的特 种 设 备安 全 技 术规 范 及 相 关 标 准 。桥 门式 类 型起 重 机 有关 安 全 技术 规 范 及标准主要有( G B 6 0 6 7 — 2 0 1 0 起 重 机 械 安 全规 程》 、 ( G B 6 0 6 7 . 5 — 2 0 1 4 起重机械安全规程第 5 部分
双梁超载限制器的规格 -回复
双梁超载限制器的规格-回复双梁超载限制器的规格是指该装置在使用时需要符合的特定要求和标准。
它通常是用来监测和保护双梁起重机或其他起重设备在运行过程中的超载情况,并在超载时自动停止或提醒操作者采取必要的措施来避免事故的发生。
下面我将一步一步回答你提出的关于双梁超载限制器规格的问题,以帮助你更好地了解该装置的工作原理和要求。
1. 什么是双梁超载限制器?双梁超载限制器是一种用于检测和保护双梁起重机或其他起重设备超载的装置。
它通过测量和监控负载的重量,并将其与事先设定的额定负载进行比较,判断是否超过了限定的范围。
2. 双梁超载限制器的工作原理是什么?双梁超载限制器通常采用压力传感器或应变传感器等测量装置,将负载的压力或应变转化为电信号。
这些电信号经过放大和处理后,再经过一个比较器进行判断。
如果检测到负载超过设定的阈值,比较器将触发一个报警信号或直接切断电源,停止起重机的工作。
3. 双梁超载限制器的规格有哪些要求?双梁超载限制器的规格要求通常包括以下几个方面:- 额定负载范围:指该限制器所能测量和判断的负载范围。
一般情况下,双梁超载限制器的额定负载范围应根据起重机的实际工作情况和设计参数来确定。
- 精度和灵敏度:即限制器所能测量和判断负载的精确程度和敏感程度。
这对于确保起重机的安全运行非常重要,因此一般要求双梁超载限制器的精度和灵敏度较高。
- 报警方式:指当检测到负载超过设定阈值时,限制器将采取何种方式进行报警,如发出声光报警或发送信号给控制室操作员等。
- 标定和调整:双梁超载限制器的安装和调试应符合相关标准要求,在使用前需要进行准确的标定和调整,以确保它能够可靠地工作。
- 报警和停机功能:该规格要求限制器能够及时准确地报警或停机,以避免设备超载导致事故的发生。
- 环境适应性:双梁超载限制器通常需要在各种恶劣的工作环境下使用,如高温、低温、湿度等。
因此,其规格要求还包括对环境适应性和防护等级的要求。
- 可靠性和安全性:对于限制器来说,可靠性和安全性是最为重要的规格要求之一。
双梁超载限制器的规格 -回复

双梁超载限制器的规格-回复双梁超载限制器(Double Girder Overload Limiter),作为一种重要的安全装置,广泛应用于起重机械行业。
它的主要功能是监测起重机械的负载,当超过设定的限制值时,及时发出警报或停止运行,以避免可能发生的事故。
本文将详细介绍双梁超载限制器的规格以及其主要性能特点。
规格是指产品的具体技术参数和尺寸要求,决定了产品的适用范围和性能优劣。
双梁超载限制器的规格主要包括以下几个方面:载荷范围、示值误差、主要尺寸和安装要求。
首先是载荷范围。
双梁超载限制器的载荷范围是指它能够监测的最大负载值和最小负载值。
通常,载荷范围的选择应根据起重机械的使用要求和实际工况进行。
例如,对于小型起重机械,其负载范围一般在几吨到几十吨之间;而对于大型起重机械,其负载范围可能达到数百吨甚至更高。
其次是示值误差。
示值误差是指双梁超载限制器显示的实际负载值与实际负载值之间的差异。
示值误差应尽量小,以保证精确的负载监测。
一般来说,示值误差应在额定负荷的百分之几内,以确保安全可靠的工作。
接下来是主要尺寸。
主要尺寸包括双梁超载限制器的外形尺寸、安装孔距和连接方式等。
外形尺寸应根据起重机械的结构特点和安装条件进行选择,以确保双梁超载限制器可以安装在适当的位置上。
安装孔距和连接方式应与起重机械的梁上规定的安装孔距和连接方式相匹配,以确保双梁超载限制器的稳定性和可靠性。
最后是安装要求。
双梁超载限制器的安装要求包括安装位置、安装方法和连接方式等。
安装位置应选择在起重机梁的适当位置,以确保双梁超载限制器可以准确监测起重机械的负载情况。
安装方法应根据产品说明书进行,以确保安全可靠。
连接方式应选择合适的连接方式,确保双梁超载限制器与起重机械的梁紧密连接,避免松动或脱落。
除了以上规格,双梁超载限制器还具有一些其他的性能特点。
首先是具备可靠的报警和停止功能。
当超载发生时,双梁超载限制器会通过声光报警等方式提醒操作人员,并自动停止起重机械的运行,以避免事故发生。
起重机超载限制器标准

起重机超载限制器标准起重机超载限制器是一种用于保护起重机安全运行的重要装置,它可以监测和限制起重机的工作状态,确保在安全范围内进行作业。
在实际的工程施工中,起重机超载限制器的使用具有重要意义,它可以有效地避免因超载引起的事故,保障施工现场的安全。
因此,对起重机超载限制器的标准和要求需要有清晰的认识和了解。
起重机超载限制器的标准主要包括以下几个方面:一、技术要求。
1. 起重机超载限制器应具有可靠的超载检测功能,能够准确监测起重机的工作状态,及时发出警报并限制起重机的工作,确保在安全范围内进行作业。
2. 起重机超载限制器的测量精度应符合国家标准要求,能够准确地测量起重机的负荷重量,并能够在一定范围内进行调整和校准。
3. 起重机超载限制器应具有良好的抗干扰能力,能够在恶劣的施工环境下稳定可靠地工作,不受外界干扰影响。
二、安全要求。
1. 起重机超载限制器应具有自检功能,能够定期进行自检,确保装置的正常工作状态。
2. 起重机超载限制器应具有防水、防尘、防震等功能,能够在各种恶劣环境下稳定可靠地工作。
3. 起重机超载限制器的报警装置应具有清晰、响亮的警报声音,能够有效地提醒操作人员并引起注意。
三、安装要求。
1. 起重机超载限制器的安装位置应符合国家标准和设计要求,能够有效地监测起重机的工作状态。
2. 起重机超载限制器的安装应牢固可靠,能够承受起重机在工作过程中产生的振动和冲击。
3. 起重机超载限制器的安装应符合相关安全规范和标准要求,确保安全可靠地使用。
综上所述,起重机超载限制器的标准是确保起重机安全运行的重要保障,对其技术、安全和安装要求都有着严格的规定和要求。
只有严格按照标准进行选型、安装和使用,才能有效地保障起重机的安全运行,避免因超载引起的事故。
因此,在实际的工程施工中,需要严格按照起重机超载限制器的标准要求进行操作,确保施工现场的安全和稳定。
起重机械限位器 标准

起重机械限位器标准
起重机械限位器是一种安全装置,用于限制起重机的移动或提升范围。
它能够防止超载、碰撞或损坏等不可预见的危险情况的发生,保护起重机的安全运行,避免工人和财产的损失。
起重机械限位器的执行标准通常根据国家或地区的安全规范和标准进行设计和使用。
在中国,起重机械限位器被列为特种设备的重要组成部分,其安全性能和执行标准受到严格监管。
根据国家质量监督检验检疫总局发布的《起重机械安全规程》(GB/T 6067.1-2010),起重机械限位器是起重机械安全保护装置之一,包括起重量限制器、力矩限制器、极限位置限制器等。
根据该规程,起重机械限位器的作用是在起重机达到设定的限位点时及时检测并发出信号,使起重机停止或减速,以确保操作的安全性和有效性。
不同类型的限位器根据其功能和用途,有着不同的执行标准和设计要求。
总的来说,起重机械限位器的执行标准通常包括设计、制造、安装、调试、使用等方面的规定和要求,以确保其安全性能的有效性和可靠性。
在使用起重机械限位器时,应严格按照相关规定和标准进行操作和维护,确保其正常运转和安全性能的充分发挥。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
起重机超载限制器的设计一.概述本篇文章简要地讲述了起重机限制器的基本构成,并对其基本软硬件进行了简单的介绍。
起重机限制器主要用于对工矿企业和施工现场的起重机,行车进行超载限制。
当它进行工作时,若起重机承受重物在额定值的90%以内,则该限制器能显示重物的实际重量,若重物的重量超过额定值的90%但在105%以内,该限制器显示重物的实际重量的同时发出声光预警信号,若重物的重量达到或超过额定值的105%,该限制器将发出声光报警信号,同时自动切断起重机电源。
该限制器还能自动记录超载的次数,供有关部门检查。
二.系统设计根据上述的工作原理和技术要求,可知该系统实际上是一个典型的数据采集与控制系统,数据采集的对象是一路压力(拉力),故选用压力(拉力)传感器进行物理量的测量,控制对象是断电及报警装置,故选用继电器及声响电路进行断电和报警。
1.硬件设计硬件电路如下图所示,模拟信号放大部分选用运算放大器OP07,A/D转换器选用MC14433,系统主机选用8031单片机,扩充一片程序存储器2716,地址及数据锁存器选用74LS373,4线-7线译码器选用4511,驱动器选用MC1413,基准电压源选用MC1403,数码显示部分选用BS212共阴数码管,音响部分选用一片KD9561。
由电路图可知,硬件系统上电工作后,由压力(拉力)传感器来的微弱电信号(约20uV)经OP07送到MC14433进行A/D转换,MC14433送出的4位8421BCD码及4位选通信号一起送到8031单片机的P1口,8031根据P1口来的信号进行处理判别后送到4511和MC1413译码驱动显示。
若采集到的物重达到或超过额定值的90%,则由P3.0送出低电平驱动声光预警电路。
105%,超载计数单元加1,由P3.1送出低电平,驱动声光报警电路,并由继电器切断起重机电源。
硬件部分还设计了一个掉电保护电路,当8031系统的电源出现意外情况突然下降或消失时,可由掉电保护电路保护8031内存单元中的内容。
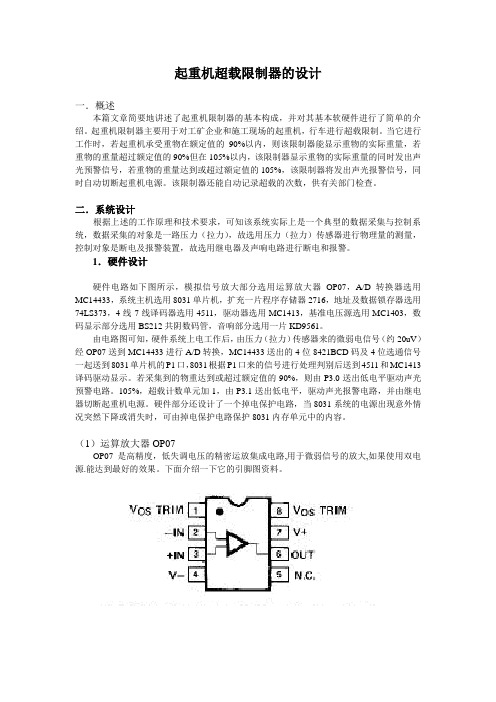
(1)运算放大器OP07OP07是高精度,低失调电压的精密运放集成电路,用于微弱信号的放大,如果使用双电源.能达到最好的效果。
下面介绍一下它的引脚图资料。
V5+性能:1) 低的输入噪声电压幅度—0.35 μVP-P (0.1Hz ~10Hz)2) 极低的输入失调电压—10 μV3) 极低的输入失调电压温漂—0.2 μV/ ℃4) 具有长期的稳定性—0.2 μV/MΩ5) 低的输入偏置电流—± 1nA6) 高的共模抑制比—126dB7) 宽的共模输入电压范围—±14V8) 宽的电源电压范围—± 3V ~± 22V(2)A/D转换器MC14433双积分型由于两次积分时间比较长,所以转换速度慢,但精度可以做得比较高;对周期变化的干扰信号积分为零,抗干扰性能也较好。
常用的有3½位双积分A/D转换器MC14433(精度相当于11位二进制数)和4½位双积分A/D转换器ICL7135(精度相当于14位二进制数)。
1. MC14433A/D转换器简介MC14433是3½位双积分型A/D转换器,优点:精度高、抗干扰性能好等,缺点:转换速度慢,约1~10次/秒。
与国内产品5G14433完全相同,可互换。
被转换电压量程为199.9mV 或1.999V。
转换完的数据以BCD码的形式分四次送出。
1)MC14433的引脚功能说明各引脚的功能如下:1)电源及共地端V DD:主工作电源+5V。
V EE:模拟部分的负电源端,接-5V。
V AG:模拟地端。
V SS:数字地端。
V R:基准电压输入端。
2)外接电阻及电容端R1:积分电阻输入端,转换电压Vx=2V时,R1=470Ω;Vx=200mV时,R1=27kΩ。
C1:积分电容输入端,一般取0.1 F。
R1/C1:R1与C1的公共端。
CLKI、CLKO:外接振荡器时钟调节电阻RC,RC一般取470Ω左右。
3)转换启动/结束信号端EOC:转换结束信号输出端,正脉冲有效。
DU:启动新的转换,若DU与EOC相连,每当A/D转换结束后,自动启动新的转换。
4)过量程信号输出端OR*:当|Vx|<V R,输出低电平。
5)位选通控制端DS4~DS1:分别为个、十、百、千位输出的选通脉冲,DS1对应千位,DS4对应个位。
每个选通脉冲宽度为18个时钟周期,两个相应脉冲之间间隔为2个时钟周期。
如图所示6)BCD 码输出端Q0~Q3:BCD 码数据输出线。
Q3为最高位,Q0为最低位。
当DS2、DS3和DS4选通期间,输出三位完整的BCD 码数,但在DS1(千位)选通期间,输出端Q0~Q3除了表示个位0或1外,还表示被转换电压的正负极性(Q2=1为正)、欠量程还是过量程,具体含义如表所示。
1)在Q0=“0”的条件下,Q3=0表示千位(1/2位) 为1, “Q3=1”表示千位为0。
2)Q2表示极性, “1”为正极性, “0”为负极性。
3)Q0=“1”表示过量程或欠量程,Q3=0 表示过量程,Q3=1表示欠量程。
(3)译码器45114511是一个用于驱动共阴极 LED (数码管)显示器的 BCD 码—七段码译码器,特点如下:具有BCD 转换、消隐和锁存控制、七段译码及驱动功能的CMOS 电路能提供较大的拉电流。
可直接驱动LED 显示器。
其功能介绍如下:BI:4脚是消隐输入控制端,当BI=0 时,不管其它输入端状态如何,七段数码管均处于熄灭(消隐)状态,不显示数字。
L T:3脚是测试输入端,当BI=1,LT=0 时,译码输出全为1,不管输入DCBA状态如何,七段均发亮,显示“8”。
它主要用来检测数码管是否损坏。
LE:锁定控制端,当LE=0时,允许译码输出。
LE=1时译码器是锁定保持状态,译码器输出被保持在LE=0时的数值。
D A、DB、DC、DD、为8421BCD码输入端。
a、b、c、d、e、f、g:为译码输出端,输出为高电平1有效。
CD4511的内部有上拉电阻,在输入端与数码管笔段端接上限流电阻就可工作。
8421 BCD 码对应的显示见下图:(4)地址及数据锁存器74LS37374LS373是单片机种常用的芯片。
它是带三态缓冲输出的8D触发器,起引脚图与结构原理图如下:<74LS373引脚图内部结构原理图电路连接图>G——输入端,与8031ALE连高电平:畅通无阻。
低电平:关门锁存。
图中OE——使能端,接地。
当G=“1”时,74LS373输出端1Q—8Q与输入端1D—8D相同;当G为下降沿时,将输入数据锁存。
2.软件设计在任务的总体设计思想和硬件确定之后,就可以开始设计程序,根据前面介绍的工作原理和技术指标,软件设计应完成的任务为:(1)初始化程序初始化程序主要用来确定堆栈,程序状态字,对存储单元清零,让数码管闪烁显示全零10次。
流程图如下所示:初始化程序流程图根据流程图,编程如下:START:MOV SP, #60H ;初始化MOV PSW, #00HCLR A;清21H,22H单元ANL 21H, AANL 22H, AMOV R0, #0AH ;全0闪烁十次LOOP:MOV A, #F0H ;全0显示MOVX @R1, A;送P0口显示LCALL DS1 ;调用延时子程序MOV A, #00H ;显示全暗MOVX @R1, ALCALL DS1DJNZ R0, LOOP ;闪烁完十次否….….(2)数据采集子程序起重机在实际工作前,超载限制器应先检测出起重机挂钩,承重绳等物体的重量,这里把它们称为自重。
当起重机实际起吊重物时,检测到的重量成为毛重,而物体的实际重量等于毛重减去自重。
程序中数据存储单元为31H(千位和百位),32H(十位和个位)数据采集子程序流程图如下:编程如下:IN1:MOV A, P1 ;输入转换结果JNB ACC.4, IN1 ;是千位选通否IN2:JNB ACC.3, IN3 ;千位为1否CLR A;千位为0MOV 31H, ASJMP IN4IN3:MOV 31H, #10H ;千位为1送入31H高四位IN4:MOV A, P1JNB ACC.5, IN4 ;是百位选通位否ANL A, #0FH ;提取百位值ORL A, 31H ;与千位值合并MOV 31H, A;存入31H单元IN5: MOV A, P1JNB ACC.6,IN6 ; 是十位选通位否SWAP A;高低四位交换ANL A, #0F0H ; 提取十位值MOV 32H, AIN6:MOV A, P1JNB ACC.7, IN6 ; 是个位选通位否ANL A, #0FH ; 提取个位值ORL A, 32H ; 与十位值合并MOV 32H, A;存入32H单元RET ;子程序返回数据采集子程序流程图(3)自重值显示子程序系统开机工作后,首先调用数据采集子程序,获得自重值,然后分别将他们送到 27H 和28H 单元。
自重显示程序是从27H 和28H单元中提取千,百,十,个位值,再配上选通位后从数据总线输出。
下面是程序流程图和对应的程序:根据流程图编程如下:MOV 27H, 31H ;千,百位送27HMOV 28H, 32H ;十,个位送28HMOV A, 27HANL A, #0F0H ;提取千位值SWAP AMOV 11H, A;存入11HMOV A, 27HANL A, #0FH ;提取百位值MOV 12H, A;存12H单元MOV A, 28HANL A, #0F0H ;提取十位值SWAP AMOV 13H, A;存入13HMOV A, 28HANL A, #0FH ;提取个位值MOV 14H, A;存14H单元MOV R0, #0FFH ;设显示次数LOOP1:MOV A, 11HORL A, #10H ; 组合千位值和选通位MOVX @R1, A;输出到显示器LCALL DS2 ;延时MOV A, 12HORL A, #20H ; 组合百位值和选通位MOVX @R1, A;输出到显示器LCALL DS2 ;延时MOV A, 13HORL A, #40H ; 组合个位值和选通位MOVX @R1, A;输出到显示器LCALL DS2 ;延时MOV A, 14HORL A, #80H ; 组合十位值和选通位MOVX @R1, A;输出到显示器LCALL DS2 ;延时DJNZ R0, LOOP ;显示次数到否自重值显示子程序流程图(4)采集毛重程序由于起重机或吊车在吊起重物时存在着一定的加速度,这就会影响到传感器测得的信号的准确性。
因此在这里当程序执行完自重测量和显示后,延时约0.5S后再进行毛重测量。
同时采用两次采样,采样间隔约0.5S。