步进电机驱动控制
步进电机的驱动原理
步进电机的驱动原理
步进电机的驱动原理可以通过以下几点来解释:
1. 电磁驱动:步进电机内部通常包含多个线圈,每个线圈都有一对电极。
通过交替通电来激励这些线圈,可以产生磁场。
这个磁场与固定磁铁或其他线圈的磁场相互作用,从而使电机转动。
2. 步进角度:步进电机的转动一般是围绕其轴心以一定的步进角度进行的。
这个步进角度是由电机的结构和驱动信号决定的。
常见的步进角度有1.8度、0.9度、0.72度等。
通过适当的电
流驱动和控制信号,可以实现电机按照这些角度进行准确的转动。
3. 控制信号:步进电机一般需要外部的电流驱动器或控制器来提供适当的电流和控制信号。
这些控制信号通常是脉冲信号,通过改变脉冲的频率、宽度和方向,可以控制电机的转动速度和方向。
4. 开环控制:步进电机的控制通常是开环控制,即没有反馈回路来监测电机的实际位置和速度。
控制信号是基于预先设定的脉冲数目和频率来驱动电机的。
因此,步进电机在运行过程中可能存在累积误差,特别是在高速运动或长时间运行的情况下。
总而言之,步进电机的驱动原理是通过控制电流、改变磁场以及控制信号的脉冲,实现电机按照设定的步进角度进行准确转动的过程。
s7-200步进电机控制s-200步进电机控制s7-200步进电机控制s7-200步进电机控制

PTOx_RUN子程序(运行轮廓)
• PTOx_RUN子程序(运行轮廓)命 令PLC执行存储于配置/轮廓表的 特定轮廓中的运动操作。开启EN位 会启用此子程序。在懲瓿蓲位发出 子程序执行已经完成的信号前,请 确定EN位保持开启。
• 现在比较常用的步进电机包括反应式步进电机(VR)、 永磁式步进电机(PM)、混合式步进电机(HB)和单相 式步进电机等。
• 电机固有步距角:
• 它表示控制系统每发一个步进脉冲信号,电机所 转动的角度。电机出厂时给出了一个步距角的值 。
• 如86BYG250A型电机给出的值为0.9°/1.8°(表 示半步工作时为0.9°、整步工作时为1.8°), 这个步距角可以称之为‘电机固有步距角’,它 不一定是电机实际工作时的真正步距角,真正的 步距角和驱动器有关。
• Error(错误)参数包含本子程序的结果。 如果PTO向导的HSC计数器功能已启用, C_Pos参数包含用脉冲数目表示的模块; 否则此数值始终为零。
编程
运行。 • 脉宽时间 = 0 占空比为0%:输出关闭。 • 周期 < 2个时间单位 周期的默认值为两个时间单
位。
• PTO操作
• PTO为指定的脉冲数和指定的周期提供方 波(50%占空比)输出。PTO可提供单脉冲 串或多脉冲串(使用脉冲轮廓)。您指定 脉冲数和周期(以微秒或毫秒递增)。
• 周期范围从10微秒至65,535微秒或从2毫秒 至65,535毫秒。
产生一个高速脉冲串或一个脉冲调制波形。 • Q0.0 • Q0.1
• 当Q0.0/Q0.1作为高速输出点使用时,其普 通输出点禁用,反之。
步进电机的控制原理

步进电机的控制原理步进电机是一种高精度的电动执行器,具有定位准确、不需反馈器和转矩、速度和位置控制的特点,广泛用于数码设备、计算机和机器人控制等领域。
步进电机的控制原理包括三部分:输入信号、驱动电路和电机转动。
一、输入信号步进电机的输入信号有两种:脉冲信号和方向信号。
脉冲信号是由控制器发送给驱动电路的,用来控制电机的转动步数和速度。
步进电机的每一步运动需要一定的脉冲信号,具体步数由控制器编程决定。
方向信号则表示电机转动的正、反方向,一般由控制器通过电平高低来控制。
输入信号是步进电机运动的基础,只有正确的输入信号才能实现精准控制。
二、驱动电路步进电机的控制需要依赖驱动电路,一般为双H桥驱动电路。
它能够根据输入信号的变化,控制步进电机的相序和电流大小,从而实现电机的精准控制。
驱动电路是整个控制系统的核心部分,不同类型的步进电机需要不同的驱动方式,因此制定相应的驱动电路是十分重要的。
三、电机转动步进电机的转动是由驱动电路提供的电流产生的磁场、轴承和转子间的相互作用实现的。
不同类型的步进电机其转动的方式也不同,如单相、两相、五相、六相等。
不同类型的步进电机也需要不同的驱动方式,否则会导致控制不准确或失步。
综上所述,步进电机的控制原理需要在三个方面进行开展:输入信号、驱动电路和电机转动。
只有以正确的方式输入信号,配合正确的驱动电路和电机类型,才能实现精准的电机控制。
在实际应用中,我们需要根据具体情况来选择不同类型的步进电机和相应的控制方式,以实现最优控制效果。
步进电机的控制的原理

步进电机的控制的原理步进电机(Stepper Motor)是一种将电脉冲信号转换为角度让电机转动的电机。
它通常由定子和转子组成,定子线圈通过控制电流的输入来产生磁场,而转子则是由磁材料制成的。
步进电机有许多种类型,其中最常见的是单圈、双圈和四圈步进电机。
步进电机凭借其高精度、高可靠性等优点,在很多领域都有广泛的应用,包括打印机、电子门锁、数码相机等。
步进电机的控制原理主要包括两个方面,即脉冲信号的输入以及驱动电流的控制。
下面将详细介绍这两个方面的原理。
首先是脉冲信号的输入。
步进电机的转动是通过输入脉冲信号驱动的。
脉冲信号可以由切换电路产生,也可以由计算机或其他控制系统发出。
脉冲信号的频率决定了步进电机转动的速度,而脉冲信号的数量则决定了步进电机转动的角度。
当脉冲信号输入到步进电机的一个定子线圈时,该线圈产生一个磁场。
根据电磁感应定律,该磁场将对转子产生一个力矩,使其转动一定的角度。
当脉冲信号不再输入时,磁场也消失,转子停止转动。
如果脉冲信号连续输入,那么步进电机将不断地进行转动。
接下来是驱动电流的控制。
步进电机的线圈通常由绝缘性材料包裹,以防止电流损耗。
驱动电流的控制是通过对步进电机的定子线圈施加合适的电压来实现的。
根据欧姆定律,电流与电压的比值等于线圈的电阻。
通过改变电压的大小,可以控制线圈中的电流,进而控制步进电机的转动速度和力矩。
为了更好地控制步进电机的转动,常常采用两相驱动方式。
两相驱动方式是指将步进电机的两个定子线圈分别驱动,使其产生独立的磁场。
通过交替输入脉冲信号,可以让步进电机转动一个固定的角度。
在实际应用中,常常使用驱动器来控制步进电机的驱动电流。
驱动器接受外部脉冲信号,并通过电流放大器将电流信号传输给定子线圈。
此外,通过改变定子线圈的电流方向,可以改变步进电机的转动方向。
例如,如果一个线圈中的电流是顺时针方向的,而另一个线圈中的电流是逆时针方向的,那么步进电机就会向顺时针方向转动。
步进电机的驱动控制电路
绕组电 流小了, 输出转矩就会以12关系下降 1 21。此外, 在绕组电流截止时, 相绕组地两端 还会产生很高的反电动势。为提高步进电机 系统的性能和效率, 一般对驱动电路具有如 下要求: ①通电周期内能提供足够大的矩形波或 接近矩形波的电流。 ② 具有截止电流泻放回路, 以降低相绕组 两端的反电动势, 加快电流的衰减。 ③驱动电源效率高、功耗低, 运行稳定
蓄雾 蓄粼蹂。动路斩曝 盘瓷 严电 波 曹
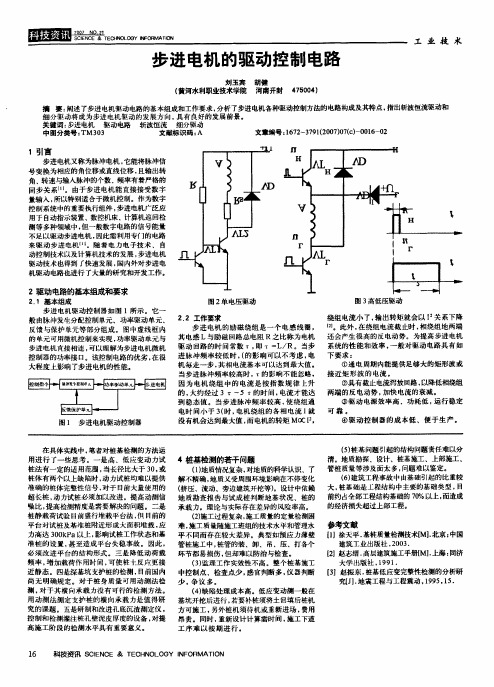
,引言 步进电 机又称为脉冲电 它 机, 能将脉冲信 号变 换为 相应的角位移或直线位移, 输出 且 转 角、 转速与 输入脉冲的 个数、 频率有着严格的 同步关系川。由于步进电机能直接接受数字 量输入, 所以特别适合于微机控制。作为数字
控制系统中的重要执行组件, 步进电机广泛应 用于自 动指示装置、 数控机床、 计算机巡回检 测等多种领域中, 但一般数字电路的信号能量 不足以驱动步进电机, 因此需利用专门的电路 来驱动步进电机川。随着电力电子技术、自 动控制技术以及计算机技术的发展, 步进电机 驱动技术也得到 了 快速发展, 国内外对步进电 机驱动电路也进行了大量的研究和开发工作。
图3 高低压驱动
图1 步进电机驱动控制器
2 .2 工作要求 步进电机的励磁绕组是一个电感线圈, 其电感L 与励磁回路总电阻R 之比称为电机 驱动回路的时间常数 T , T = L/ R 。当步 即 进脉冲频率较低时,的影响可以不考虑, ( 电 机每走一步, 其相电流基本可以达到最大值。 当步进脉冲频率较高时, 的影响不能忽略, T 因为电机绕组中的电流是按指数规律 上 升 的, 大约经过 3 r 一5 T 的时间, 电流才能达 到稳态值。当步进脉冲频率较高, 使绕组通 电时间小于 3(时, 电机绕组的各相电流 1就 没有机会达到最大值, 而电机的转矩 MOC12,
步进电机 驱动器 控制器三者的关系
电机行业专业求职平台1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机、交流电机在常规下使用。
步进电机必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
它涉及到机械、电机、电子及计算机等许多专业知识。
提及此知识,希望能给予正在对电机选型的客户有所帮助。
2.力矩:电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度,则产生力F与(dФ/dθ)成正比S其磁通量Ф=Br*SBr为磁密,S为导磁面积F与L*D*Br成正比L为铁芯有效长度,D为转子直径Br=N·I/R电机行业专业求职平台N·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。
力矩=力*半径力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态)因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。
一、混合式步进电机1、特点:混合式(又称感应子式步进电机)与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。
因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。
混合式步进电机某种程度上可以看作是低速同步电机。
一个四相电机可以作四相运行,也可以作二相运行。
(必须采用双极电压驱动),而反应式电机则不能如此。
例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)完全可以采用二相八拍运行方式.不难发现其条件为C= A ,D=B . 一个二相电机的内部绕组与四相电机完全一致,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,更可以作二相电机绕组串联或并联使用。
步进电机驱动器及细分控制原理

步进电机驱动器及细分控制原理引言:步进电机是一种将电脉冲信号转化为机械转动的电动机。
步进电机驱动器是一种用于控制步进电机旋转的设备。
步进电机可以通过控制驱动器提供的电流和脉冲信号来精确地控制旋转角度和速度。
本文将介绍步进电机驱动器的工作原理以及细分控制的原理。
一、步进电机驱动器的工作原理:1.输入电流转换:驱动器将输入的电流信号转换为电压信号。
电流信号通常由控制器产生,通过选择合适的电阻来控制输入电流的大小。
2.逻辑控制:驱动器还会接收来自控制器的脉冲信号。
这些脉冲信号会相互间隔地改变驱动器输出的电压,从而驱动步进电机旋转。
脉冲信号的频率和脉冲数量会影响步进电机的转速和旋转角度。
3.输出电压控制:驱动器会根据输入的电流和脉冲信号控制输出的电压,使其适应步进电机的工作要求。
输出电压的频率和脉冲数有助于控制步进电机旋转的速度和角度。
二、细分控制原理:细分控制是指通过控制驱动器输出的电压脉冲信号来实现更精确的步进电机控制。
细分控制可以将步进电机的每个脉冲细分成更小的步进角度,从而提高步进电机的转动分辨率。
1.脉冲信号细分:通过改变驱动器的输出脉冲信号频率和脉冲数来实现脉冲信号的细分。
例如,如果驱动器输入100个脉冲,但只输出50个脉冲给步进电机,那么每个输入的脉冲就会分为两个输出脉冲,步进电机的旋转角度将更精确。
2.电流细分:通过改变驱动器输出的电流大小来实现电流的细分。
通常情况下,驱动器的输出电流会根据步进电机的转动需要进行控制。
细分控制可以使驱动器能够实现更精确的电流控制,进而控制步进电机的转动精度。
3.微步细分:微步细分是一种更高级的细分控制方法,通过改变驱动器输出的电压波形进行微步细分。
微步细分将步进电机的每个步进角度再次细分为更小的角度,进一步提高了步进电机的转动分辨率和平滑性。
总结:步进电机驱动器是通过将控制器产生的电流和脉冲信号转换为驱动步进电机的电压信号的设备。
细分控制是通过改变驱动器输出的电流和脉冲信号来实现更精确的步进电机控制。
步进电机驱动器及细分控制原理
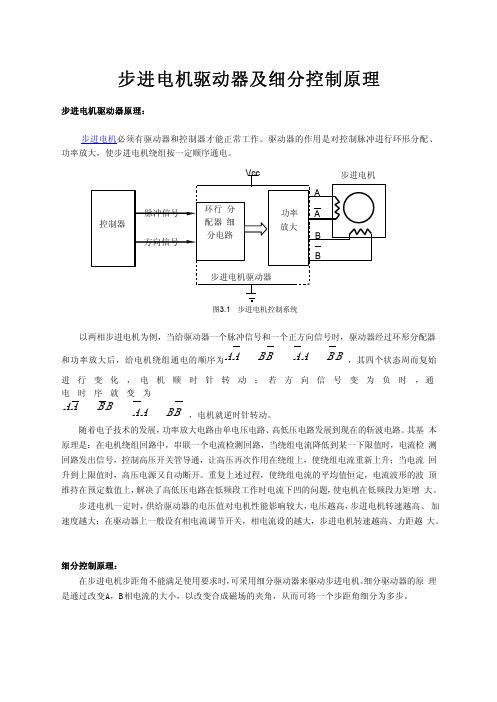
步进电机驱动器及细分控制原理步进电机驱动器原理:步进电机必须有驱动器和控制器才能正常工作。
驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电。
以两相步进电机为例,当给驱动器一个脉冲信号和一个正方向信号时,驱动器经过环形分配器和功率放大后,给电机绕组通电的顺序为AABB A A B B,其四个状态周而复始进行变化,电机顺时针转动;若方向信号变为负时,通电时序就变为AA B BA A BB,电机就逆时针转动。
随着电子技术的发展,功率放大电路由单电压电路、高低压电路发展到现在的斩波电路。
其基本原理是:在电机绕组回路中,串联一个电流检测回路,当绕组电流降低到某一下限值时,电流检测回路发出信号,控制高压开关管导通,让高压再次作用在绕组上,使绕组电流重新上升;当电流回升到上限值时,高压电源又自动断开。
重复上述过程,使绕组电流的平均值恒定,电流波形的波顶维持在预定数值上,解决了高低压电路在低频段工作时电流下凹的问题,使电机在低频段力矩增大。
步进电机一定时,供给驱动器的电压值对电机性能影响较大,电压越高,步进电机转速越高、加速度越大;在驱动器上一般设有相电流调节开关,相电流设的越大,步进电机转速越高、力距越大。
细分控制原理:在步进电机步距角不能满足使用要求时,可采用细分驱动器来驱动步进电机。
细分驱动器的原理是通过改变A,B相电流的大小,以改变合成磁场的夹角,从而可将一个步距角细分为多步。
定子A转子SNB B BSNA A(a)(b)AS NB B N S BS NA(c)(d)图3.2步进电机细分原理图仍以二相步进电机为例,当A、B相绕组同时通电时,转子将停在A、B相磁极中间,如图3.2。
若通电方向顺序按AA AABB BB BB AA AA AA BB BB BB AA,8个状态周而复始进行变化,电机顺时针转动;电机每转动一步,为45度,8个脉冲电机转一周。
与图2.1相比,它的步距角小了一半。
42步进电机驱动原理

42步进电机驱动原理
42步进电机是一种常用的电机驱动器件,它采用了步进电机工作原理,通过电流控制来驱动电机的运动。
具体的驱动原理如下:
1. 步进电机由电机本体和驱动电路组成,其中驱动电路负责控制电机的转动。
2. 驱动电路通过控制电流的大小和方向,来控制步进电机的每一步的转动。
3. 在步进电机驱动电路中,一般采用了电流变化的方式来控制电机的转动。
即通过改变电流的大小和方向,来控制步进电机在每一步中的转动角度。
4. 在控制电流大小方面,一般采用了细分驱动的方式来提高驱动精度。
常见的细分方式有全、半、四、八、十六等细分,不同的细分方式可以控制电流的变化,从而控制电机的转动。
5. 在控制电流方向方面,一般采用了H桥驱动器来实现。
H 桥驱动器可以控制电流的正反方向,从而控制电机的正反转。
6. 步进电机的转动方向和步数是由驱动电路中的控制信号来控制的。
驱动电路会根据输入的控制信号来控制电机的转动,通过改变电流的大小和方向,从而控制电机的转动步数和方向。
综上所述,42步进电机驱动原理是通过控制电流的大小和方
向,利用电流变化和H桥驱动器来控制电机的转动。
不同的控制信号可以控制电机的不同转动步数和方向。
机械电子学-第6章 步进电动机的驱动与控制

认识步进电动机
功能 • 将电脉冲信号转换成转角或转速信号。 • 转角 ∝脉冲信号的个数; • 转速 ∝脉冲信号的频率。 • 转向取决于脉冲信号的相序
f
相
f N
通电脉冲频率 拍数
步进电动机的特点
2) 步距角
步进机通过一个电脉冲转子转过的角度,称为步距角。
S
360 ZrN
N:一个周期的运行拍数 Zr:转子齿数
如:Zr=40 ,
N=3 时
S
360 40 3
3
1 单拍制
拍数:N=km m:相数 k=
整步
2 双拍制
半步
步距角不受各种干扰因素的影响。
步进电动机的特点
2) 步距角
步进电动机的特点
3) 转速
每输入一个脉冲,电机转过
S
360 ZrN
即转过整个圆周的1/(ZrN), 也就是1/(ZrN)转
因此每分钟转过的圆周数,即转速为
n
60f ZrN
60f 360 360Z r N
s f
6
(r / min)
步进电动机的特点
4)误差不长期积累。 5)可实现数字信号的开环控制,控制系统廉价。 6)步进电机具有自锁能力
齿距角 为使转、定子的齿对齐,定子磁极上的小齿, 齿宽和齿槽和转子相同。
工作原理:假设是单三拍通电工作方式。
(1)A 相通电时,定子A 相的五个小齿和转子对 齐。此时,B 相和 A 相空间差120,含
120/9 = 13 1 齿 3
A 相和 C 相差240,含240/ 9 =26 2个齿。所以, A 相的转子、定子的五个小齿对齐时,3B 相、C 相不能 对齐,B相的转子、定子相差 1/3 个齿(3),C相的 转子、定子相差2/3个齿(6)。
PLC如何控制步进电机

PLC如何控制步进电机PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的控制设备,通过输入/输出模块对各种机电设备进行控制。
在PLC系统中,步进电机是常见的执行元件之一,它具有准确的位置控制和高的加减速性能。
本文将介绍PLC如何控制步进电机,包括步进电机的驱动方式、PLC的控制原理及步进电机控制的程序设计。
一、步进电机的驱动方式1.串行通信驱动方式:步进电机通过串行通信驱动方式与PLC进行通信和控制。
首先,将PLC与串行通信模块相连,通过串行通信模块与步进电机控制器进行通信。
PLC通过串行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
2.并行通信驱动方式:步进电机通过并行通信驱动方式与PLC进行通信和控制。
与串行通信驱动方式类似,首先将PLC与并行通信模块相连,通过并行通信模块与步进电机控制器进行通信。
PLC通过并行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
3.脉冲驱动方式:步进电机通过脉冲驱动方式与PLC进行通信和控制。
在脉冲驱动方式中,需要PLC输出脉冲信号控制步进电机。
通常情况下,PLC将脉冲信号传递给步进电机驱动器,在驱动器中产生相应的控制信号,实现对步进电机的控制。
二、PLC的控制原理PLC作为控制器,一般采用扫描运行方式。
其运行原理如下:1.输入信号读取:PLC将外部输入信号输入到输入模块中,采集输入信号,并将其从输入模块传递给中央处理器(CPU)进行处理。
2. 程序执行:CPU根据事先编写好的程序进行处理,包括数据处理、逻辑运算和控制计算等。
PLC程序一般采用ladder diagram(梯形图)进行编写。
3.输出信号控制:根据程序的执行结果,CPU将处理好的数据通过输出模块发送给外部设备,用于控制和操作外部设备。
三、步进电机控制的程序设计步进电机的控制程序主要包括参数设定、模式选择、起停控制、运动控制等部分。
下面以一个简单的例子来说明步进电机控制的程序设计过程:1.参数设定:首先需要设定步进电机的一些参数,如电机型号、步距角度、运动速度等。
步进电机的驱动原理

步进电机的驱动原理步进电机的驱动原理主要包括两种类型,开环控制和闭环控制。
开环控制是指通过控制电流的大小和方向来驱动步进电机,而闭环控制则是在开环控制的基础上增加了位置反馈系统,以实现更精确的位置控制。
首先,我们来看一下开环控制的驱动原理。
在开环控制中,步进电机的驱动器通过控制电流的大小和方向来控制电机的转动。
通常情况下,步进电机的驱动器会根据预先设定的步进角度和速度来控制电流的大小和方向,从而驱动电机按照预定的路径和速度进行转动。
开环控制的优点是结构简单、成本低廉,适用于一些对位置精度要求不高的应用场景。
而闭环控制则是在开环控制的基础上增加了位置反馈系统。
通过在步进电机上安装位置传感器,可以实时监测电机的位置,并将反馈信息传输给驱动器,从而实现更精确的位置控制。
闭环控制的优点是能够克服步进电机本身存在的一些缺点,如失步、共振等问题,提高了系统的稳定性和精度。
除了控制方式的不同,步进电机的驱动原理还与电机的类型密切相关。
常见的步进电机包括单相、双相和三相步进电机,它们的驱动原理略有不同。
单相步进电机通常采用双极性驱动方式,即通过改变电流的方向来控制电机的转向;双相步进电机则采用四相驱动方式,通过控制两对线圈的电流来实现电机的转动;而三相步进电机则采用六相驱动方式,通过控制三对线圈的电流来驱动电机。
不同类型的步进电机有不同的驱动原理,因此在实际应用中需要根据具体情况选择合适的电机类型和驱动方式。
总的来说,步进电机的驱动原理涉及到开环控制和闭环控制两种方式,以及不同类型电机的具体驱动方式。
在实际应用中,需要根据具体的需求和场景选择合适的驱动方式和电机类型,以实现更精准、稳定的位置控制。
希望本文能够帮助读者更好地理解步进电机的驱动原理,为实际应用提供一定的参考价值。
步进电动机驱动控制原理

步进电机控制步进电动机一、步进电动机的组成和种类二、步进电动机的工作原理2.1.1B'B'C'C'这种工作方式下这种工作方式下,,三个绕组依次通电一次为一个循环周期个循环周期,,一个循环周期包括三个工作脉冲一个循环周期包括三个工作脉冲,,所以称为三相单三拍工作方式以称为三相单三拍工作方式。
按A →B →C →A →……的顺序给三相绕组轮流通电轮流通电,,转子便一步一步转动起来转子便一步一步转动起来。
每一拍转过30°(步距角步距角)),每个通电循环周期每个通电循环周期(3(3(3拍拍)转过90°(一个齿距角一个齿距角))。
2.1 2.1 步进电动机步进电动机步进电动机结构与工作原理结构与工作原理2.1.2 三相六拍按A →AB →B →BC →C →CA 的顺序给三相绕组轮流通电序给三相绕组轮流通电。
这种方式可以获得更精确的控制特性获得更精确的控制特性。
4123齿与A、A' 对齐对齐。
对齐,,又转324齿与B、B´对齐三相反应式步进电动机的一个通电循环周期如下期如下::A →AB →B →BC →C →CA ,每个循环周期分为六拍环周期分为六拍。
每拍转子转过15°(步距角步距角),),),一一个通电循环周期环周期((6拍)转子转过90°(齿距角齿距角))。
与单三拍相比与单三拍相比,,六拍驱动方式的步进角更小,更适用于需要精确定位的控制系统中更适用于需要精确定位的控制系统中。
2.1.3 三相双三拍按AB→BC→CA的顺序给三相绕组轮流通每拍有两相绕组同时通电。
电。
每拍有两相绕组同时通电。
B'C'B'C'B'C'360°电机转动的电机转动的工作原理演示工作原理演示总结总结::错齿是步进电动机旋转的根本原因齿距角是齿距角是99°;定子仍是6个磁极个磁极,,但每个磁极表面加工有五个和转子一样的齿面加工有五个和转子一样的齿。
如何优化步进电机的驱动控制算法

如何优化步进电机的驱动控制算法在现代工业和自动化领域,步进电机因其精确的定位和简单的控制方式而得到广泛应用。
然而,要充分发挥步进电机的性能,优化其驱动控制算法至关重要。
首先,我们来了解一下步进电机的基本工作原理。
步进电机是一种将电脉冲信号转换为角位移或线位移的开环控制电机。
每输入一个脉冲信号,电机就转动一个固定的角度。
这种特性使得步进电机在需要精确控制位置和速度的场合具有独特的优势。
要优化步进电机的驱动控制算法,第一步是提高脉冲信号的精度和稳定性。
脉冲信号的质量直接影响电机的运行精度和稳定性。
可以采用更高精度的时钟源来产生脉冲,减少脉冲的抖动和误差。
同时,对脉冲信号进行滤波和整形处理,去除干扰和噪声,确保信号的干净和准确。
其次,合理的细分驱动是优化控制算法的重要手段。
细分驱动是将一个步距角细分成多个微步,从而使电机的运行更加平滑和精确。
通过细分,可以降低电机的振动和噪声,提高运行的平稳性。
在实现细分驱动时,需要精确计算每个微步的电流和相位,以保证电机的输出力矩均匀。
电流控制也是优化驱动控制算法的关键环节。
合适的电流控制策略可以提高电机的效率和输出力矩。
常见的电流控制方式有恒流控制和斩波控制。
恒流控制可以保证电机在不同转速下的输出力矩稳定,但可能会导致较大的功率损耗。
斩波控制则能够根据电机的转速和负载动态调整电流,提高系统的效率,但控制算法相对复杂。
可以根据具体的应用需求选择合适的电流控制方式,并进行参数优化。
另外,加减速控制对于提高电机的运行性能也非常重要。
在电机启动和停止阶段,过快的速度变化会导致失步和冲击。
通过合理的加减速控制算法,可以实现电机的平稳启动和停止,减少对机械系统的冲击。
常见的加减速控制方法有直线加减速和指数加减速。
直线加减速算法简单,但在高速阶段加速度较大;指数加减速则能够在整个速度范围内实现较为平滑的加速度变化。
为了进一步优化控制算法,还可以引入反馈机制。
例如,使用编码器或霍尔传感器来实时监测电机的位置和速度,将反馈信号与给定信号进行比较,通过闭环控制算法对电机的运行进行调整。
步进电机最简单的驱动方法
步进电机最简单的驱动方法步进电机是一种常见的电机类型,它可以根据输入的脉冲信号来精确控制旋转角度,适用于许多自动控制领域。
在步进电机的驱动方法中,最简单的方式是使用驱动器和控制器来实现基本的控制。
步进电机最简单的驱动方法通常采用的是开环控制系统。
开环控制是一种简单直接的控制方法,通过向步进电机施加固定的脉冲信号来驱动电机旋转。
在这种方法中,控制系统不会对电机的实际运动进行反馈检测,而是仅依赖于输入的脉冲信号来控制电机的步进运行。
为了实现步进电机的最简单驱动方法,需要准备以下几个关键元素:1.步进电机:作为被驱动的执行器,根据输入的信号进行步进运动。
2.驱动器:将控制器发送的信号转换为电机可以理解的脉冲信号,驱动电机正常工作。
3.控制器:负责生成适时的脉冲信号,控制电机的步进运动。
在步进电机的最简单驱动方法中,控制器生成的脉冲信号会传输给驱动器,驱动器再将信号传送给步进电机,从而让电机按照一定的步距顺序运转。
这种开环控制方法简单高效,适用于一些对运动精度要求不高的场景,比如简单的机械转动、小型设备控制等。
尽管步进电机的最简单驱动方法在某些应用中效果显著,但也存在一些局限性。
由于开环控制无法对电机实际运动状态进行监测和修正,容易出现误差累积导致不精确的情况。
因此,在一些对运动精度要求高的场景中,通常需要采用闭环控制系统,结合位置反馈传感器实现更精准的控制。
在实际应用中,可以根据需要选择合适的步进电机驱动方法。
若对精度要求不高,且对成本和复杂度有限制,最简单的开环控制方法可能是较为合适的选择。
而在一些对精度要求高、需求复杂的场景中,闭环控制系统通常能更好地满足要求。
综上所述,步进电机的最简单驱动方法采用开环控制系统,通过控制器生成的脉冲信号驱动电机旋转。
这种方法简单直接,适用于一些精度要求不高的场景。
在实际应用中,需要根据具体需求选择合适的驱动方法,以达到最佳控制效果。
步进电机细分驱动控制

步进电机作为一种电脉冲——角位移的转换元件,由于具有价格低廉、易于控制、无积累误差和计算机接口方面等优点,在机械、仪表、工业控制等领域中获得了广泛的应用。
步进电机细分驱动技术是70年代中期发展起来的一种可以显著改善步进电机综合使用性能的驱动控制技术。1975年美国学者T.R.F redr ik sen首次在美国增量运动控制系统及器件年会上提出了步进电机步距角细分的控制方法。在其后的二十多年里,步进电机细分驱动技术得到了很大的发展,并在实践中得到广泛的应用。实践证明,步进电机细分驱动技术可以减小步进电机的步距角,提高电机运行的平稳性,增加控制的灵活性等。
1、步进电机细分驱动原理
步进电机的驱动是靠给步进电机的各相励磁绕组轮流通以电流,实现步进电机内部磁场合成方向的变化来使步进电机转动的。设矢量TA ,TB ,TC,TD 为步进电机A,B,C,D四相励磁绕组分别通电时产生的磁场矢量;TAB ,TBC,TCD,TDA为步进电机中AB,BC,CD,DA 两相同时通电产生的合成磁场矢量。当给步进电机的A,B,C,D四相轮流通电时,步进电机的内部磁场从TA→TB→TC→TD,即磁场产生了旋转。一般,当步进电机的内部磁场变化一周(360°)时,电机的转子转过一个齿距,因此,步进电机的步距角Bθ可表示为:rMBNθθ= 。
式中,Nr 为步进电机的转子齿数;Mθ为步进电机运行时两相邻稳定磁场之间的夹角。Mθ与电机的相数(M)和电机的运行拍数有关。当电机以单四拍方式运行时,Mθ=90°;当电机以四相八拍方式运行时,Mθ=45°。和单四拍方式相比,Mθ和Bθ都减小了一倍,实现了步距角的二细分。但是在通常的步进电机驱动线路中,由于通过各相绕组的电流是个开关量,即绕组中的电流只有零和某一额定值两种状态,相应的各相绕组产生的磁场也是一个开关量,只能通过各相的通电组合来减小Mθ和Bθ。因此,这样可达到的细分数很有限。
7.2 步进电机及其驱动控制系统

C N C 主要内容7.2 步进电机及其驱动控制系统主要内容:•步进电机的原理;•主要性能参数;•步进驱动的特点;•驱动控制:环形分配器,功放电路。
要求:在掌握原理基础上,注重围绕应用了解各型电机的特点、性能参数、功放电路。
主要内容定义:步进电机是一种脉冲控制的执行元件,将电脉冲转化为角位移。
每给步进电机输入一个脉冲,其转轴就转过一个角度,称为步距角。
✓脉冲数量----位移量;✓脉冲频率----电机转速;✓脉冲相序----方向。
组成:由步进电机驱动电源和步进电机组成,没有反馈环节,属于开环位置控制系统。
7.2.1 步进电机概述主要内容优点:结构简单,价格便宜,工作可靠;缺点:–容易失步(尤其在高速、大负载时),影响定位精度;–在低速时容易产生振动;–细分技术的应用,明显提高了定位精度,降低了低速振动。
应用:要求一般的开环伺服驱动系统,如经济型数控机床、和电加工机床、计算机的打印机、绘图仪等设备。
步进电动机的分类按运动方式分:旋转式、直线运动式、平面运动式和滚切运动式。
按工作原理分:反应式(磁阻式)、电磁式、永磁式、混合式。
按结构分:单段式(径向式)、多段式(轴向式),印刷绕组式。
按相数分:三相、四相、五相、六相和八相等。
按使用频率分:高频步进电动机和低频步进电动机。
(1) 反应式步进电动机极与极之间的夹角为60°,每个定子磁极上均匀分布了五个齿,齿槽距相等,齿距角为9°。
转子铁心上无绕组,只有均匀分布的40个齿,齿槽距相等,齿距角为360°/40=9°。
单段式的结构:三相反应式步进电动机。
定子铁心上有六个均匀分布的磁极,沿直径相对两个极上的线圈串联,构成一相励磁绕组。
特点:转子无绕组,定转子开小齿、步距小;应用最广。
7.2 步进电机及其驱动控制系统C N C(2) 永磁式步进电动机工作原理:转子或定子一方具有永久磁钢,另一方有软磁材料制成,由绕组轮流通电产生的磁场与永久磁钢相互作用,产生转矩是转子转动。
实验5步进电机控制

实验五PWM配置及步进电机控制一、实验目的1. 了解步进电机驱动原理;2. 了解步进电机的控制原理;3. 熟悉使用PWM控制步进电机的运行。
二、实验主要内容1. DSP的初始化;2. ePWM模块初始化与配置;3. 步进电机的驱动程序。
三、实验基本原理1. 步进电机的驱动:图1 是单极性步进电机驱动的典型电路,图中的方块为驱动开关。
针对SEED-DEC 中直流电机系统的动作要求,步进电机驱动电路设计思路如下:1)电机采用15V直流电源供电;2)4路控制信号由DSP提供,信号为CMOS标准电平,通过排线接入并下拉;3)使用达林顿管TIP31C代替IRL549作为电机驱动开关,基级串接100欧电阻减小MOS管的寄生震荡;4)使用快速二极管IN4007完成保护功能,以免电机换向时烧毁电机;图 1 步进电机驱动电路2. 步进电机的控制一般分为四相四拍与四相八拍两种方式,其中前者称为全步,后者称为半步。
步进电机在这个实验中选择的时M35SP-7N,其步进角为7.5°,是一种单极性步进电机。
它的结构如图2:图 2 步进电机结构四、实验过程和关键程序解读1. 启动CCS,进入CCS的操作环境,并导入stepmotor工程。
2. 加载stepmotor工程,添加xml文件3. 阅读源代码1)初始化系统控制寄存器与要使用的GPIO:2)关中断、初始化PIE、初始化PIE向量表3)关ePWM时钟,配置后打开时钟,并更新中断向量表4)ePWM初始化函数(以EPwm1为例):EPWM2的其他配置与1相同,不用的在于一些事件产生的动作不同:其产生的pwm波为CMPAABCD线圈按照ACBD的次序导通步进电机接线示意图(2b-A、1b-B、1a-C、2a-D):则步进电机顺时针旋转4. 按照老师要求修改源代码1)改变步进电机的转速在使用直流电机时,通常是用占空比来调节转速的,但是在步进电机中,是通过改变PWM的频率来调整的,因为在一个PWM周期中,步进电机改变的相位是一样的,所以PWM频率越高,改变相同相位就越快,所以转速也越快,程序中我们只需改变TBPRD的值即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要步进电机及其驱动系统具有成本低、控制系统简单、升级更新方便的优势,所以在数控、冶金等工业现场使用越来越普及。
但是与伺服系统相比,缺点也很明显,步进电机存在低频振荡、抗干扰能力差的问题,负载波动过大时,可能出现丢步甚至堵转的危险。
所以研究一种可以改善步进电机运行性能的控制方式具有重要的运用价值和现实意义。
当前,步进电机的驱动方法有许多种,本文在研究和比较各种驱动方法的基础上,确立了采用脉冲细分技术作为本课题研制的步进电机驱动方法。
步进电机是通过上位机或者数控系统给驱动器发送电脉冲控制的,上位机每发一个脉冲,步进电机转过一个步距角,采用细分技术,步进电机转过相同的角度,驱动器需要的脉冲等于细分数。
因此,步进电机在相同速度下的脉冲频率也随之升高,可以抑制低频振荡。
论文完成了硬件电路和软件程序的设计,硬件电路主要包括控制部分和功率部分,软件主要包括系统主程序和中断服务子程序。
最后,在 Matlab/Simulink 下搭建了系统仿真模型,对系统控制方案进行了仿真,在不同细分条件和转速下获得了绕组相电流的波形,验证了系统控制方案的可行性。
实验结果表明,采用细分驱动技术后,电机运行效果明显比没有采用细分技术效果好,电机噪声小,运行平稳。
关键词:步进电机脉冲细分驱动技术数字信号处理器系统仿真模型AbstractWith the advantage of low cost, controlled simply, updated convenience, The stepsystem is more and more popular in the industrial field of electrical macine, metallurgyand it has the trend of replacing the expensive servo system. Compared to the servosystem, the shortcoming is also obviously. The problem of low-frequency oscillation isserious, when the load fluctuate drastically, stepping motor may occur the phenomenon oflosing step or even stall. The study of method which can improve the performance ofstepping motor has important value and practical significance.Currently, there are many methods to drive stepping motor, under the analysis andcomparison of these methods, the thesis decide to use the method of subdivisionechnology to drive the stepping motor. Stepping motor rotation is in the control of pulsewhich was send by the host computer. The stepping motor will run one step when receivedone pulse, by the use of this new technology, the driver must receive a number of pulsewhen running the same angle, the pulse frequency in the same speed will increase byseveral times. This will suppress low frequency oscillation of motor.The thesis completes the design of hardware circuit and software. The hardwarecircuit includes control circuit and power circuit. The software includes main program andinterruptted service routine. Finally, set up the simulation model in Matlab, and simulatethe system scheme. Gain stator phase current in different subdivision and speed, verify thefeasibility of the system scheme. The results of experiment show that the motor operatingperformance is better than system without subdivision, and the noice is small.Key words: Stepping motor Subdivision technology Digital signal processorSystem simulation model目录第一章绪论 (4)1.1论文选题背景及研究意义 (4)1.2国内外研究现状 (6)1.3论文研究的主要内容 (8)第二章方案论证 (10)2.1系统设计要求 (10)2.1.1 三相混合式步进电机的结构 (10)2.1.2 工作原理 (12)2.2 步进电机的脉冲细分技术 (14)2.3 三相混合式步进电机的数学模型 (15)2.4 系统控制方案设计 (18)第三章系统的硬件电路设计 (19)3.1 系统硬件总体框架设计 (19)3.2 控制电路硬件设计 (20)3.2.1 TMS320F28032数字处理器介绍 (21)3.2.2 控制信号转换电路 (21)3.2.3电流采样和隔离放大电路 (22)3.2.4 过流与掉电保护电路 (23)3.3 智能功率模块和驱动电路 (24)3.3.1 智能功率模块 IPM 介绍 (24)3.3.2 PWM 驱动电路 (25)3.4 系统辅助电源的设计 (25)第四章系统的软件设计 (26)4.1 系统软件方案设计 (26)4.2 各程序模块功能介绍 (28)4.2.1 系统初始化程序 (28)4.2.2 电流环中断服务程序 (28)4.2.3 功率驱动保护中断程序 (29)4.2.4 掉电保护中断程序 (29)4.3 PID 调节器及其数字化实现 (29)4.4 空间矢量脉宽调制技术(SVPWM)的原理及其数字实现 (31)4.4.1 空间矢量脉宽调制技术原理 (31)4.4.2 空间矢量脉宽调制算法数字实现 (34)总结 (36)致谢 (37)参考文献 (38)附录1:程序清单 (40)附录2:系统原理图 (42)第一章绪论1.1论文选题背景及研究意义步进电动机是一种典型的实用型机电一体化装置,又叫脉冲式电动机或者阶跃式电动机,是电机家族的“婴儿”,20 世纪 60 年代早期才开始流行,最初构想是作为位置控制应用中伺服电机的低成本替代产品,新兴的计算机工业迅速将其采用到外设应用当中。
步进电机的主要优势是:可以提供开环位置控制,而成本只是需要反馈的伺服系统的几分之一。
狭义上,步进电机可以定义为这种电机:接收上位机或数控系统发送的脉冲信号,步进电机驱动系统将脉冲信号转换为角位移,电机转过的角位移由接收的脉冲数量决定,收到一个脉冲,电机转过一个步距角,若没有脉冲信号,则转子保持静止状态,电机转过的角度由脉冲数量决定,电机转速由脉冲频率决定。
广义上,步进电机可以看作一种受脉冲信号控制的无刷直流电机,也可以认为是在低速运行状态下,转速与脉冲频率成正比的同步电机。
由于步进电机驱动系统结构简单,控制比较方便并且没有累计误差,而且成本比伺服系统低很多,所以,步进电机在数控、纺织、印刷、化工等领域得到了广泛的运用[1]。
数字式三相混合式步进电机驱动器实三项步进电机驱动器步进电机种类非常繁多,不同阶段每种步进电机的发展也不一样,最早出现的步进电机类型是永磁式步进电机,这种电机主要运用于计算机外设、阀门控制、自动绕线机及医疗设备等领域[4]。
后来出现了反应式步进电机,逐渐取代了永磁式电机,混合式步进电机是在永磁式和反应式的基础上发展起来的,结合了两种电机的优势。
国内在上世纪 80 年代研制出混合式步进电机,经过三十多年的研究与应用,随着新材料的不断发现和应用,电机的制作方法已经有了很大的改进,日趋完善,能够基本满足工业现场的应用需求。
根据电机绕组相数的不同,混合式步进电机比较常见的类型有两相式、三相式和五相式。
两相式电机优点比较明显,与三相式和五相式相比,它的电机结构最简单,生产制作起来比较容易,但是缺点也比较多,例如易发生振荡、运行不平稳。
五相式电机在两相式结构上做了很大的修改,电机绕组从二相变为五相,内部结构变的更加复杂,由于相数的增多,成本也提高了很多,对于成本控制要求比较高的步进系统来说,采用五相电机优势不明显,特别是随着脉冲细分技术的研究与发展,步进电机微步驱动技术日渐成熟,使得步距分辨率的提高不再仅仅依赖电机绕组的相数,因此,五相式电机的广泛使用受到了很大的局限性,随着三相式电机的出现,二相式电机和五相式电机的运用越来越少,三相式电机已经逐渐成为混合式步进电机市场的主流产品,与伺服系统相比,虽然开环控制的步进系统性能比较差,但是却具有成本低,驱动系统简单的优点,因此,三相混合式步进电机在许多对精度要求比较低的控制领域已经取代了交流伺服产品[2][3]。
步进电机1.2 国内外研究现状步进电机细分驱动技术是二十世纪70年代中期发展起来的,它是一种可以显著改善步进电机综合使用性能的驱动控制技术。
1975年美国学者T.R.Fredriksen首次在美国增量运动控制系统及器件年会上提出了步进电机步距角细分的控制方法。
在其后的二十多年里,步迸电机细分驱动技术得到了很大的发展,并在实践中得到了广泛的应用。
实践证明,步进电机细分驱动技术可以减小步进电机的步距角,提高步进运行的平稳性,增加控制的灵活性等(12.311国内外研究开发步进电机细分驱动器的科研单位、厂家很多。
如:中国科学院自动化研究所开发的步进电机细分驱动器系列,其中针对三相反应式步进电机,细分数为10;北京兴大豪科技开发有限公司开发的用于电脑绣花机的步进细分驱动器;深圳市自山机电一体化技术有限公司开发的三相反应式步进电机驱动器,最大细分数可达480;国外产品主要有美国SHAPHON公司生产的细分驱动器系列,其中SH 一3F075M反应式步进电机驱动器为40细分。