B52微机手册
9326 D2U V2 Node B本机调测手册
9326 D2U V2本机调测手册编制Prepare : 齐聪云审核Review :批准Approve :更改历史Revision history目录Contents1准备步骤 (4)2本机调测 (5)2.1软件升级 (5)2.2参数修改: (8)2.2.1PCM参数修改 (8)2.2.2修改Node B IP地址 (9)2.2.3修改RRH类型页面 (9)2.2.4修改BTS页面 (10)2.2.5修改PCM&IMA页面 (11)2.3Node B参数备分 (12)1准备步骤1、首先在PC机上安装调测软件j2re-1_4_2_03-windows-i586-p.exe2、配置本机IP:223.254.254.1子网掩码:255.255.240.03、设备上电,打开总电源,风扇电源,数字模块电源,设备启动,等待板卡灯正常亮起< 文档结束End of file >二、登陆板卡连接电脑到PORT2调测网口,打开浏览器,地址输入http://223.254.254.244/til/index.html 登陆设备,在TIL窗口输入用户名路径。
Start 进入调测面板。
在登陆之前一定要检查好ALARM与ALARM INT的连接线要插好。
不然会出问题的。
登陆后稍微等一会再操作,等待TIL的几个叹号提示,否则可能后面的操作不能进行。
2本机调测2.1软件升级打开Tools→Software Upgrade→New Software Download,出现Choose a delivery file对话框,打开升级文件夹,选取FILE0文件,确定。
注意的是升级完成后立即对其重启(Tool→Software upgrade→Activation and iBTS reset)注意:这里下载的是D2U站的软件一定不要选错 D2U V2目前最新版本尾号为30150。
另外请在下载软件之前把连接RRH到D2U主设备的尾纤(光纤)拔掉,经过测试多次,不拔掉线可能会DONW不进去的。
LPMS-B2系列硬件手册说明书
LPMS-B2 Series Hardware Manual ver. 1.0LP-RESEARCH Inc.Version HistoryTable of Contents1.Introduction ....................................................................... - 1 -2.System Overview .............................................................. - 2 -3.Coordinate ........................................................................ - 3 -4.Specification ..................................................................... - 4 -5.Battery Charging .............................................................. - 7 -Charging ........................................................................................ - 7 -LED Indication ............................................................................... - 7 -6.Mechanical Information .................................................... - 8 -1.IntroductionWelcome to the LP-RESEARCH Motion Sensor LPMS-B2 Series hardware manual.In this documentation we will primarily introduce the hardware specifications of LPMS-B2 Series sensors. If you have any further questions or comments regarding this documentation please feel free to contact us anytime.For more information on the LPMS-B2 or other product series, please refer to related datasheets and user manuals, available from the LP-RESEARCH website at the following address: .Table 1-1. LPMS-B2 Series part number informationPart NumberBluetoothClassic 2.0Bluetooth LowEnergy 4.1EnclosureCaseEmbeddedBatteryLPMS-B2 ✓✓✓✓LPMS-B2 OEM ✓✓✗✗2. System OverviewFig. 2.1. LPMS-B2 series sensor structureCharger and Battery UnitMCU3 axis Accelerometer3 axis Gyroscope 3-axis MagnetometerPressure SensorFlash UnitBluetooth UnitData/Command5V DC3.CoordinateThe LPMS sensor calculates the orientation difference between a fixed sensor coordinate system (S) and a global reference coordinate system (G). Both coordinate systems are defined as right-handed Cartesian coordinate systems. The sensor coordinate system (S) is constructed as following images.Z YXZYXFig. 3.1. Sensor coordinates of LPMS-B2 and LPMS-B2 OEMThe global reference coordinate system (G) can be divided into two different cases. While the orientation calculation is using all acceleration, gyroscope and magnetic data (sensor filter mode set at acc+gyr+mag), (G)system is defined as following:•X positive when pointing to the magnetic north•Y positive when pointing to the magnetic west•Z positive when pointing up (gravity points vertically down with -1g)While the orientation calculation is using only acceleration and gyroscope data (sensor filter mode set at acc+gyr), (G) system is defined as following: •X positive aligned to ground plane horizontal projection of x axis of (S) when sensor powered on•Y positive based on right-handed Cartesian coordinate definition•Z positive when pointing up (gravity points vertically down with -1g)4.SpecificationTable 4-1. Overall parametersParameters LPMS-B2LPMS-B2 OEM Output range of Euler angle Roll: ±180°; Pitch: ±90°; Yaw: ±180°Bandwidth400HzResolution<0.01°Accuracy<0.5°(Static), <2°RMS (Dynamic) Max. instant impact (0.1 ms)10,000gOutput data type Raw data/Euler/Quaternion/Linear acceleration/Air pressure/Altitude/TemperatureLatency 20 msInternal sampling rate400Hz Communication interface Bluetooth Classic 2.0 (BLE4.1 Optional) Max. baudrate 921600 bps Communication protocol LPBUSSize39x39x8 mm 16x31x4 mm Weight12 g 2g Communication distance<20mMax. data update rate400HzPower consumption<**********Power supply Lithium Battery > 6h(3.7V@230mAh)3.3-5.5V DCWorking temperature-20~+60 °C -40 ~ +80 °CConnector*Micro USB, type B Micro USB, type B; SM02B-SURS-TF;*LPMS-B2 USB connector is only used for charging, the sensor is powered by the internal embedded lithium battery.Table 4-2. Accelerometer SpecificationParameters Typical Value Unit Measurement range±2/±4/±8/±16 g Sensitivity0.061/0.122/0.244/0.488 mg/LSBLinear accelerationsensitivity changevs. temperature±1 %Linear accelerationtypical zero-g leveloffset accuracy±40 mgLinear accelerationzero-rate changevs. temperature±0.5 mg/°CAcceleration noise density90(FS= ±2 g ODR = 104 Hz)μg/√HzParameters Typical Value Unit Measurement range±125/±245/±500/±1000/±2000 dps Sensitivity 4.375/8.75/17.50/35/70 mdps/LSBAngular ratesensitivity changevs. temperature±1.5 %Angular rate typicalzero-rate level±10 dps Angular rate typicalzero-rate levelchange vs.temperature±0.05 dps/°C Rate noise density7 mdps/√HzTable 4-4. Magnetometer SpecificationParameters Typical Value Unit Measurement range±4/±8/±12/±16 Gauss Sensitivity6842/3421/2281/1711 LSB/gaussZero-gauss level±1(FS=±4 gauss)gaussRMS noise(Ultra-high-perform ance mode)X axis 3.2 mgauss Y axis 3.2 mgauss Z axis 4.1 mgaussNon-linearity±0.12 %FSTable 4-5. Pressure and Humidity Sensor Specification Parameters Typical Value UnitPressuremeasurement range300~1100 hPa Temperaturecoefficient of offset±1.5 Pa/K Absolute accuracypressure±1.0 hPa Pressure sensitivity 0.18 Pa Pressure noise 1.3 Pa Humiditymeasurement range0~100 %RH Humidity accuracy ±3 %RH Humidity latency(10~90~10 %RH,25 °C)±1 %RH Humidity sensitivity 0.008 %RH Humidity noise 0.02 %RH Humidity stability(10~90 %RH,25 °C)0.5 %RH/year5.Battery ChargingChargingThe LPMS-B2 sensor can be charged through the micro USB port. In case of LPMS-B2 OEM, users have to specify the methods of power supply for their own designs.The charging voltage for LPMS-B2 is 5V and the required power current is at least 100mA for an efficient charging progress. Depending on the remaining power in the battery, the on-board LED will show different charging status by different colors. Detailed information of the LED status is introduced in the following section.LED IndicationTable 5-1. LED Status IndicationWork Mode LED Status LED Color Remaining BatteryNormalConnection off Blinking lightBlue >10%Red <10% Connection on Pulsating lightBlue >10%Red <10% Charging Always onGreen >90%Blue 20%~90%Red <20%6.Mechanical InformationFig. 6.1. LPMS-B2 DimensionFig. 6.2. LPMS-B2 OEM DimensionCopyright © 2020, LP-RESEARCH Inc. All rights reserved.。
飞机技术培训资料:CFM56-5B学员手册

20
发动机本体——附件齿轮箱
CFM56-5B发动机
21
发动机本体——附件齿轮箱
CFM56-5B发动机
22
发动机本体——附件齿轮箱碳封严
CFM56-5B发动机
23
发动机本体——附件齿轮箱碳封严
CFM56-5B发动机
24
发动机本体——孔探
CFM56-5B发动机
25
发动机本体——孔探
CFM56-5B发动机
N1 振动极限 6 如果超限配平风扇叶片 N2 振动极限 4.2 如果超限只能换发
CFM56-5B发动机
68
CFM56-5B发动机
69
CFM56-5B发动机
70
CFM56-5B发动机
71
CFM56-5B发动机
72
CFM56-5B发动机
73
反推系统
CFM56-5B发动机
74
CFM56-5B发动机
CFM56-5B发动机
7
CFM56-5B发动机概述
CFM56-5B发动机
8
发动机本体——进气道
CFM56-5B发动机
9
发动机本体——压气机
9级
1级
4级
20喷嘴、2点火咀
1级
4级
CFM56-5B发动机
10
发动机本体——转子&主轴承
3#轴承受颗粒污染会失效,新发动机要以50-60H为周期,定期检查磁堵。 发动机风车转动时限为6小时。
P-----三维气动设计(高压压气机、 高压涡轮、低压涡轮)
无----二维气动设计 3-----技术嵌入型(TAI)
2-----DAC(双环腔燃烧室) 无----SAC(单环腔燃烧室)
B520技术手册
布赫HPX5005i操作手册(微机6)综述
布赫HPX5005i操作手册<第6章>微机操作部分目录基本功能6.1 引言6.2操作概念6.3启动PC机,登录6.4常规操作、生产模式6.5清洗榨汁机6.6手工操作6.7 显示和打印错误信息6.8 打印榨汁机工作记录6.9紧急停止后的重新启动6.10 退出PC和关机。
无权限使用预防。
扩展功能6.11 第一次使用榨汁机说明6.12 指定密码,定义登录级别6.13 选择语言和单位(英制或公制)6.14 基本操作信息6.15选择-改变加工设定6.16 安全特性6.17 维修操作6.18 维护保养6.19 附录6.1引言谢谢您!我们诚挚地向您致意,欢迎您成为布赫的用户!您选择了一款智能性的自动优化的HPX5005i型水果榨汁机,具有质优、经济、可靠和价稳等显著特点。
特性布赫HPX5005i型水果榨汁机用户手册只有本册。
安全性本操作手册,尤其是第二章“安全守则”旨在帮助安全地使用布赫HPX5005i型榨汁机,保护相关人员、机器本身和环境!注意!在您阅读并理解第一册第2章“安全守则”之前,千万别动您的HPX5005i榨汁机!关于这本手册本操作手册有助于您对您的布赫HPX5005i型榨汁机的PC控制系统的结构、工具和指令有一个全面的了解,可以作为日常操作人员的参考书及培训材料。
本操作手册分为“基本功能”和“扩展功能”两部分。
基本功能(6.1到6.10节)基本功能主要对象是初学者和操作人员,详细介绍了PC机从开机生产到关机的所有步骤。
(6.2节)“操作概念”中有助于您了解PC机的控制,能够进行优化果汁生产。
扩展功能(6.11到6.18节)扩展功能的对象是操作榨汁机的人员,介绍了各种可能的输入,如:密码、参数编辑等。
6.14节介绍了榨汁加工的基本原理,有助于您了解每一个加工步骤及各个程序参数的含义。
6.2操作概念目录6.2.1使用鼠标6.2.2 使用触摸面板6.2.3 菜单结构综述(用户接口)6.2.4对话控制6.2.5 确认对话6.2.6 工具条6.2.7 标准按钮6.2.8 程序步骤界面6.2.9 榨汁机显示6.2.9.1 显示框6.2.9.2果汁箱6.2.10外部连接(外围设备)6.2.1使用鼠标通常,可以通过图形用户接口上的图标按钮执行该项功能。
550 使用手册(中文版)
微调(Clarifier)
仅接收:+ / – 50 Hz、+ / – 150 Hz、+ / – 1K Hz
射频输出功率
125W 语音 / 100W ± 1 dB 双音调 / 10W PEP(可调)
发
负载率
配散热风扇可达 100%
射
无用边带抑制
优于-50dB
技
术
谐波抑制
优于-40dB
指
载波抑制
优于-50dB
GPS 系统
NMEA 0183 Ver2.0 信令格式
本机静重
3.6 公斤
体积
250 ㎜×75 ㎜×300 ㎜(宽×高×深)
扫描类型
选呼、自动增益控制、语音(一般模式)
扫描信道
500 个可编程信道
扫描速度
选呼扫描:500 毫秒 非选呼扫描:100 毫秒~99 秒可调
灵敏度
0.35µV/10 dB
选择性
2.3 KHz/-6 dB
4.2 KHz/-60 dB
接
杂波抑制
优于-60dB
收
技
抗阻塞
优于 70dB(20 KHz)
术
互调抑制
优于 70dB(30 KHz/60 KHz)
指 自动增益控制(AGC)特性 输入 3µV~3V 输出变化小于 1dB
标
音频失真度
小于 5%
音频输出
2W/8Ω
通带滤波器
± 3 KHz
宝丽 550 单边带短波电台
使用手册 (中文版)
BH7KEM 编辑录入
1
目录
1.0 技术指标...................................................................................4 1.1 概述..........................................................................................5 2.0 安装..........................................................................................5 3.0 操作..........................................................................................6 3.1 前面板说明................................................................................6 3.2 编程...........................................................................................7 3.3 信道转换....................................................................................9 3.4 微调...........................................................................................9 3.5 发射频率监视...........................................................................10 3.6 静噪..........................................................................................10 3.7 报警..........................................................................................10 3.8 2182 海难警报..........................................................................11 3.9 天线调谐...................................................................................11 3.10 工作模式...................................................................................11 3.11 扫描...........................................................................................12 3.12 选呼...........................................................................................12 3.13 电话拨号....................................................................................13 3.14 GPS 信息传送............................................................................16 3.15 寻呼............................................................................................18 3.16 状态信息接收..............................................................................18 3.17 信息记录.....................................................................................20 3.18 功能菜单.....................................................................................21 3.19 调谐接收.....................................................................................23 3.20 扫描接收.....................................................................................24 3.21 背面板端口.................................................................................24 4.0 主机及选配件..............................................................................26 5.0 外部设备.....................................................................................26 6.0 重要提示.....................................................................................27
ROP5微机综合保护测控装置用户手册
注意: 装置外壳应可靠接地。 禁止带电拔插通讯接头。 带电前确认开入量输入电压。 现场调试时应注意大电流通电时间不能过长,本装置交流回路2 倍额定电流时可连续工作,10倍额定电流时允许10s,40倍额定 电流时允许1s。 装置工作电源输入为交流或直流110V/220V。 电流输入极性是否正确,电压输入相序是否正确。
ROONZHI 201103
-3-
ROP5 系列微机保护测控装置
概述
2.9 完善的事件报告处理功能,可保存最新32次故障事件,最新32次预告事件,最新32次变 位信息,最新32次操作记录报告,最新32次自检信息,5种报告的综合分析,便于复现故障 的全部过程,便于监视对装置的各种操作; 2.10 支持数据录波功能,并实时备份到远动主机或监控系统,记录最新64组录波数据。 2.11 友好人机界面:大屏幕图形液晶显示,可显示测量数据、各种电气参数及保护信息。 中文菜单提示,操作快捷方便。 2.12 强大自检功能:具备软、硬件实时自检与报警功能。
继电器板插件:包括保护动作信号继电器及出口继电器。主要包括跳闸继电器、合闸继电器、 遥跳继电器、遥合继电器、防跳继电器、跳闸保持继电器、合闸保持继电器、合后继电器。
开入开出插件:完成开关量的光电隔离与继电器的出口功能。
ROONZHI 201103
-7-
ROP5 系列微机保护测控装置
概述
液晶模块:采用(128 ×64)大屏幕液晶显示器,全汉化显示,测量数据、保护信息、故障 波形等。采用液晶低功耗运行方式,延长了LCD使用寿命。
3 主要技术参数 3.1 计量精度
内容
条件
测量电流
(10%--120%)In
电压 有功功率
(20%--120%)Un
HXN5B机车微机控制装置用户手册
运用文件名称HXN5B机车微机控制装置用户手册编号TE6218400000D290版本 A版权专有违者必究编制胡敬松校核标准化审核批准版本号更改人更改日期更改说明变更编号A 胡敬松2014.12.31 数字量正输出板更改图号。
售后服务简介售后服务中心成立于2009年(前身售后服务部成立于2001年)。
目前,中心下设综合管理部、质量控制部、技术支持部、培训管理部、服务业务部、检修业务部6个部门,共有员工318名。
中心按照株洲本部、服务办事处、服务站三级管理模式进行组建。
设置8个服务办事处和2个检修基地,分别是:株洲、北京、广州、上海、资阳、沈阳、兰州服务办事处和青岛、武汉检修基地;时代电气售后服务中心对公司所有贴有绿荫服务标识的产品执行绿荫品牌服务。
售后服务的主要内容包括:现场服务及配件管理、技术支持、技术培训和配件管理。
1)现场服务及配件管理。
主要是产品运用现场的故障协查和处理,保证产品早期运用顺利,性能稳定;在现场筹建了配件库,存放相应基数的周转备品,以便快速、及时地修复故障。
在合同保证期内主要是保证优质、快速的配件维修;产品技术升级改造(硬件);为产品的技术升级、改善性能、持久创造价值提供保证;产品中修、大修的技术状态检测和产品翻新。
2)技术支持。
为适应不同用户的需求,给用户确定专门的技术参数,如防空转参数等,为用户自行改进产品和改良性能提供咨询建议;协议方案设计和实验工作,在硬件许可的条件下为用户升级新版本应用软件,以提升产品的附加值;为用户按产品可靠性标准合理确定储备配件的数量和种类,提供建议和咨询;为用户建立产品的维修体系、完善管理制度和提升维修人员技能,以协议提供培训和咨询。
3)技术培训。
在合同保证期内,主要是按合同要求组织各类用户培训。
根据产品的使用进程实施三级培训即前期普及培训、中期强化培训、后期重点培训。
绿荫服务简介●绿荫服务是株洲南车时代电气股份有限公司(以下简称时代电气)为“时代”产品客户建立的全面客户服务保障体系。
健伍系列对讲机编程手册及操作说明
健伍系列对讲机编程手册及操作说明2007-11-24 20:26健伍系列对讲机编程手册及操作说明今天在网上闲逛,发现这篇好东东,发上来分享下:KENWOOD TH42对讲机简易使用说明三种工作模式:1,VFO模式(频率工作模式)2,MR模式(信道模式)3,CALL模式(呼叫信道,类似普通信道模式)三种工作模式转换:分别按VFO,MR,CALL键VFO模式可以用键盘直接输入工作频率,也可以用频道旋钮改变工作频率。
频率步进选择:短按F键,再按T键,屏幕显示频率步进数值,用频道旋钮选择需要的步进频率。
普通模式:收发频率相同差频工作模式:发射频率比接收频率高或低一个设定的频率差频方向设定:短按F键,再按REV键,屏幕显示+,表示发射频率比接收频率高设定的频率。
重复上述操作,屏幕显示“-”,表示发射频率比接收频率低设定的频率重复上述操作,回到普通模式。
设定频差:长按F键,再按REV键,屏幕显示频差,用频道旋钮改变频差MR模式如何将频率存入信道?在VFO模式调好频率和频差,长按F键,屏幕右上脚显示频道数,用频道旋钮选择希望贮存的频道,再按MR键,频率即存入。
如何在一个频道中分别存贮发射和接收频率?应该先存入接收频率,再存入发射频率在VFO模式调好接收频率,长按F键,屏幕右上脚显示频道数,用频道旋钮选择希望贮存的频道,再按MR键,接收频率即存入。
在VFO模式调好发射频率,长按F键,屏幕右上脚显示频道数,用频道旋钮选择希望贮存的频道,按住PTT键不放的同时再按MR键,发射频率即存入。
CALLA模式如何将频率存入CALL信道?方法同存入MR信道基本相同,只是将上述的MR改为CALL即可。
亚音频:42A已经内置标准亚音频编码功能,解码功能需安装选件短按T键,屏幕显示T,亚音频编码功能启用再按T键,屏幕显示CT,亚音频编解码功能启用再按T键,亚音频功能不启用。
长按F键,再按T键,屏幕显示亚音频频率,用频道旋钮选择需要的频率扫描:频率扫描:长按VFO键频道扫描:长按MR键其它功能改变发射功率:短按F键,再按PTT键,可以循环选择大,小,微功率(屏幕显示为H,L,EL)照明灯长亮:短按F键,再按LAMP键调节静噪深度:短按F键,再按SQL键,用频道旋钮调整静噪深度。
IBM物理设备属性手册
关于P系列小型机的功耗以及供电准备的知识...........................................................................23
主机设备属性
P615 7029-6C3 IBM eServer pSeries 615 Rack-Mount Server Model 6C3
60U
13
FastT500/DS4400 1742-1RU IBM TotalStorage DS4400 Midrange Disk System Model 1RU
................................................................................................................................................14
P650 7038-6M2 IBM eServer pSeries 650 Server Model 6M2 .........................................4
H85 7026-6H1 IBM RS/6000 IBM eServer pSeries 660 Model 6H1 .................................5
DS4700 Family 1814+01 IBM System Storage DS4700 Express Models .............................14
DS4800/FastT900 Family 1815+01 IBM TotalStorage DS4800 Midrange Disk System.......15 磁带机设备信息.............................................................................................................................16
AM5微机保护装置操作说明书

V5-ITMS-01 V2双核心微波车检器用户手册-v2.5CS
V5-ITMS-01V2双核心微波车检器用户手册Ver.2.51.产品简介 (4)2.功能特点 (4)2.1 数据采集和参数设置 (5)2.2 复原能力 (5)2.3 本地操作与自检维护 (5)2.4 控制功能 (5)2.5 其它 (5)3.产品指标 (6)3.1 微波指标 (6)3.2 检测指标 (6)3.3 通信指标 (6)3.4 环境与可靠度指标 (6)3.5 电源指标 (6)3.6 设备指标 (6)4.认证 (6)5.设备安装 (7)5.1 典型设置 (7)5.2 环境选择 (7)5.3 安装高度、角度 (8)5.3.1 侧置距离与安装高度关系对照表 (9)5.3.2 侧置距离与安装高度选用之概测方法 (9)5.4 安装程序 (9)5.4.1 设备组件 (9)5.4.2 安装流程 (9)6.设备调试.................................... . (11)6.1 连接设定 (11)6.2 调试软件与设备连接 (12)6.3 调试软件(GUI)使用说明 (13)6.3.1 基本功能及字段使用说明 (13)6.3.2 弹出式子菜单使用说明 (17)6.4 调试操作流程 (19)6.5 准确度验测 (21)6.6 测试记录文件 (21)6.6.1 统计资料 (21)6.6.2 单车资料 (22)7.设备维护.................................... . (23)7.1 固件版本更新 (23)7.2 设备初步功能简昜检测 (24)7.3 软件故障排查 (26)8.传输缆线 (27)8.1 接线协议 (27)8.2 接线说明 (27)9.维护与服务 (28)9.1 硬件维护需知 (28)9.2 设备识别 (28)9.3 维修运送 (28)9.4 质保 (28)9.5 手册编修日期 (28)附录1:V5-ITMS-01 V2双核心微波车检器故障排查 (29)附录2:微波车检器安装调试记录表 (30)附录3:微波车检器设备失效记录表 (31)1.产品简介V5-ITMS-01 V2为运用调频连续波(FMCW)目标侦测技术之非接触式微波雷达车辆检侧器, 采用最新自主知识产权微波技术,融合双核心数字运算器,兼容侦测、演算与通讯于单一处理器模块。
计算机单选题终结版202109
计算机单选题终结版202109第1章计算机基础知识(共165个单选)1946年,美国成功研制出第一台电子计算机。
它的英文缩写是eniac__;。
计算机有很多分类方法。
在以下选项中,根据计算机处理数据的方式,这些选项不属于“通用计算机”的分类。
B例3.为了实现自动控制处理,需要计算机具有的基础条件是_存储程序___。
a目前,计算机已应用于各个行业和领域,最早的计算机设计应用于科学计算。
在计算机领域,信息被转换成可以被计算机数据处理的信息。
A.例6.计算机系统由硬件系统和软件系统两部分组成,下列选项中不属于硬件系统的是系统软件___。
d例7。
计算机的硬件系统由五部分组成,其中下列各项不属于软件。
例8。
用于在计算机内部处理数据和指令的代码是二进制代码。
B例9.计算机软件分为系统软件和应用软件两大类,下列各项中不属于系统软件的是_办公软件___。
b例10。
对应于二进制数10110001的十进制数应该是177 uud。
例11。
在计算机存储单元中,ASCII码值占用的字节数为1。
例如12。
什么样的内存会在计算机断电后导致存储数据丢失?ram?例如13。
在微型计算机中,集成在微处理器芯片上的是控制器和运算单元。
例14。
维持微机正常运行所需的输入和输出设备是键盘和监视器。
例15。
以下各项中,什么不是微机的主要性能指标?硬盘容量。
D1.自计算机问世至今已经经历了4个时代,划分时代的主要依据是计算机的_构成元件___。
d2.一般认为,世界上第一台电子数字计算机诞生于_1946年___。
a3.世界上第一台电子数字计算机采用的电子器件是_电子管___。
d4.第一代计算机体积大、功耗高、性能低。
主要原因是它受uu组件uu的影响。
B5。
第二代电子计算机的主要部件是晶体管。
B6.以集成电路为基本元件的第三代计算机出现的时间为_1965-1970___。
a7.第三代计算机采用的主要电子器件为_小规模集成电路___。
b8.采用超大规模集成电路的计算机是计算机发展中的_第4代___。
B52微机系统使用手册
-7-
3.1.1、[10]菜单功能及操作说明
3.1.2、[20]菜单功能及操作说明
-8-
-9-
3.1.3、[30]菜单功能及操作说明
-10-
3.1.4、[40]菜单功能及操作说明
3.1.5、[50]菜单功能及操作说明
-11-
-12-
3.1.6、[60]菜单功能及操作说明
3.1.7、[70] 故障记录菜单功能及操作
TP1
轿厢通信板通信信号
接轿厢通信板TP1
TD1
轿厢通信板通信信号
接轿厢通信板TD1
GND
轿厢通信板供电负电源
接轿厢通信板GND
1.7 外呼通信接口
VCC
外呼通信板供电正电源
接外呼通信板VCC端
TP2
外呼通信板通信信号
接外呼通信板TP2
TD2
外呼通信板通信信号
接外呼通信板TD2
GND
外呼通信板供电负电源
X21
检修慢上
检修状态下,接通时电梯检修上行
X22
检修慢下
检修状态下,接通时电梯检修下行
X23
主板消防开关
常开,接通时进入消防状态X来自4主板锁梯开关/ 多功能
常开,接通时进入锁梯状态/ 多功能参考[8E]菜单
X25
主板超载信号
常开,接通时进入超载状态
X26
主板光幕信号
常开,接通时光幕起作用
X27
主板司机信号/ 多功能
0
0
0
0
[1]
0
0
0
1
[2]
0
0
1
0
[3]
0
0
uf25b手册_v1_内容(韦伯特)

逆变式直流焊接电源UF25B使用手册电话:0086-0755-******** 传真:0086-0755-******** Email:wb@ UF25B目录1 简介 (2)1.1 特性简介 (2)1.2 UF25物理特性 (3)1.3 UF25主回路图 (3)2 套装组件 (4)3 功能说明 (5)3.1 前面板功能说明 (5)3.2 后面板功能说明 (7)3.3 显示说明 (10)3.3.1UF25显示内容结构说明 (10)3.3.2 主菜单显示说明 (10)3.3.3 A.WELDING MONITER(焊接运行与监控)说明 (10)3.3.4 B.SCH PROGRAM(焊接参数设置)说明 (12)3.3.4.1 焊接参数设置’说明 (12)3.3.4.2 ‘焊接监控参数设置’说明 (13)3.3.5 C.OPTION SETTING(焊机功能设置)说明 (15)3.3.6 D.CALIBRATION(焊机标定与校准)功能说明 (16)4 工作模式与焊接参数说明 (17)4.1 工作模式说明 (17)4.2 ‘BASIC’基本焊接工作模式 (17)4.2.1 不同焊接机头的设置与动作说明 (17)4.2.2 焊接参数说明 (20)4.2.3 变规范功能 (22)4.3 ‘LINK’连续焊接工作模式 (22)4.3.1 安装与设置 (22)4.3.2 焊接动作说明 (23)4.3.3 焊接参数说明 (23)4.4 ‘ROLLSPOT’滚焊/缝焊工作模式 (24)4.4.1 安装与设置 (24)4.4.2 焊接动作说明 (25)4.4.3 焊接参数说明 (25)4.5 ‘DOUBLE HEAD’双焊接机头工作模式 (26)4.5.1 安装和设置 (26)4.5.2 焊接动作说明 (27)4.5.3 焊接参数说明 (28)4.6 ‘PLC’可编程控制器控制工作模式 (29)4.6.1 与PLC连接的信号说明 (29)4.6.2 安装和设置 (31)4.6.3 焊接动作说明 (31)1 简介UF25B是一款逆变式直流焊接电源,集合了众多先进功能,使其不但具有优秀的焊接能力,还能简便地匹配多种型式焊接机头或嵌入到自动化焊接系统中作为焊接模块应用。
PWL-2B手册
目录第一章:硬件原理…………………………………………………………..第二章:操作说明………………………………………………………….第三章:软件说明………………………………………………………….第四章:调试手册………………………………………………………….第五章:维护及故障处理…………………………………………………附图1(系统原理图)………………………………………………………….附图2(操作原理图)………………………………………………………….附图3(输入输出原理图) (1)附图4(CPU原理图)………………………………………………………….附图5(显示原理图)………………………………………………………….第一章:硬件原理第一节:硬件系统的组成1:原理方框图(具体图纸参照附图3、4、5)2):硬件原理阐述(1):8路开关量8路开关量分别为:增磁、减磁、断路器、停机灭磁、停风、整流故障、开机、灭磁开关位置。
具体原理图请参照附图3开关量的公共端可以为+220V或+24V,其前级电阻分别为36K2W或3.6K0.25W,输入量可以为-220V或24V的地,输入开关量经过第一级(12V)隔离之后再经过第二级(5V)隔离进入并口扩展(8255)进入控制CPU检测各开关量的状态,从而响应各种操作要求。
开关量通过两级隔离之后,抗干扰能力比较强,同时也保护了后级电路。
(2):12路模拟量12路模拟量分别为:机端A相电压、机端B相电压、机端C相电压、励磁变A、B、C相电流、系统电压AB\BC、机端A相电流、机端C相电流、励磁电压、它机移相比具体原理图请参照附图3前面10路模拟量都为交流量,每一路通过0.2级的精密变换器之后,通过一级射级跟随进入采样保持再进入第二级射级跟随,然后再进入模拟转换开关(16选1),之后再进入最后一级射级跟随直接进入AD转换,采样保持的时间取决于采样保持器的第6脚电容的大小,10路交流量通过12点付氏算法滤去高次谐波得到相应的有效值作为控制使用。
XP562-GPRPU(B)使用手册
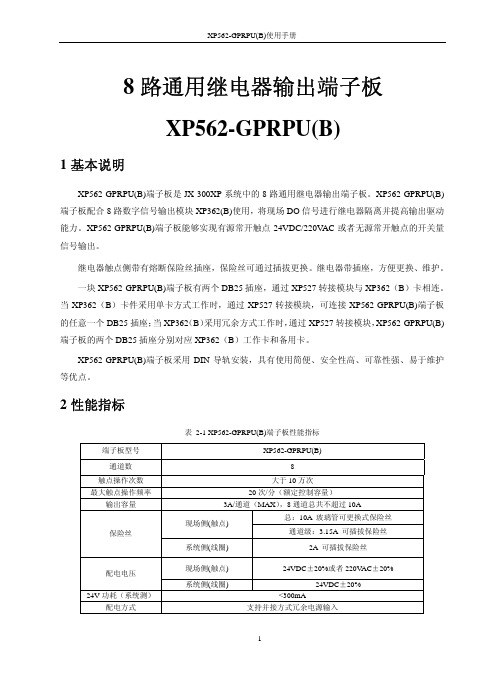
8路通用继电器输出端子板XP562-GPRPU(B)1基本说明XP562-GPRPU(B)端子板是JX-300XP系统中的8路通用继电器输出端子板。
XP562-GPRPU(B)端子板配合8路数字信号输出模块XP362(B)使用,将现场DO信号进行继电器隔离并提高输出驱动能力。
XP562-GPRPU(B)端子板能够实现有源常开触点24VDC/220V AC或者无源常开触点的开关量信号输出。
继电器触点侧带有熔断保险丝插座,保险丝可通过插拔更换。
继电器带插座,方便更换、维护。
一块XP562-GPRPU(B)端子板有两个DB25插座,通过XP527转接模块与XP362(B)卡相连。
当XP362(B)卡件采用单卡方式工作时,通过XP527转接模块,可连接XP562-GPRPU(B)端子板的任意一个DB25插座;当XP362(B)采用冗余方式工作时,通过XP527转接模块,XP562-GPRPU(B)端子板的两个DB25插座分别对应XP362(B)工作卡和备用卡。
XP562-GPRPU(B)端子板采用DIN导轨安装,具有使用简便、安全性高、可靠性强、易于维护等优点。
2性能指标表 2-1 XP562-GPRPU(B)端子板性能指标端子板型号XP562-GPRPU(B)通道数8触点操作次数大于10万次最大触点操作频率 20次/分(额定控制容量)输出容量 3A/通道(MAX),8通道总共不超过10A总:10A 玻璃管可更换式保险丝现场侧(触点)通道级:3.15A 可插拔保险丝保险丝可插拔保险丝系统侧(线圈) 2A现场侧(触点) 24VDC±20%或者220V AC±20%配电电压系统侧(线圈) 24VDC±20%24V功耗(系统测)<300mA配电方式支持并接方式冗余电源输入隔离方式通道间:点点隔离(无源配置)现场侧与系统侧:继电器隔离隔离电压2000V AC 1分钟(现场侧与系统侧)静电放电抗扰度依据标准:GB/T17626.2(IEC61000-4-2)空气放电±8kV,接触放电±6kV,间接放电±8kV电快速瞬变脉冲群抗扰度依据标准:GB/T17626.4(IEC61000-4-4)信号端±1000V浪涌(冲击)抗扰度依据标准:GB/T17626.5(IEC61000-4-5)信号端±2000V工作温度:(0~50)℃存放温度:(-40~70)℃工作湿度:10%~90%,无凝露存放湿度:5%~95%,无凝露工作环境大气压力:(62~106)kPa,相当于海拔4000米3使用说明3.1端子板外观图端子板尺寸:218mm×76mm。
【维修工作程序】8202-11_维修系统手册管理程序_V5R48
旗开得胜1概述与适用范围1.1本程序阐明了维修系统手册管理体系文件的编写、修订、评审等管理规定。
1.2本程序适用于飞机维修工程部各部、福州分公司机务部。
1.3程序属性■CCAR121 ■CCAR145航线■CCAR145定检/部件2依据文件2.1AC-121-64“质量管理系统”2.2《综合管理手册》“手册管理办法”、“手册文件编写基本要求”2.3《维修工程管理手册》“手册体系说明”2.4《维修管理手册》“修订和分发”、“安全管理体系”3术语和定义3.1本程序采用公司《综合管理手册》、《维修工程管理手册》和《维修管理手册》的有关术语、定义。
3.2维修系统管理手册体系文件(以下简称手册体系文件):是由厦航《维修工程管理手册》、《外站维修管理手册》、《维修管理手册》以及相关支持性手册和工作程序等组成。
3.3手册的“两个符合性”:一是手册的“文文符合”,即手册应符合国家法律、法规和局方规章的要求,部门级手册应符合公司级手册的要求;二是手册的“文实符合”,即手册内容应符合运行实际需要,具有可操作性。
4要求4.1所需的人员岗位4.1.1质量部主管、质保工程师4.1.2培训部主管、各单位主管4.1.3手册程序编写人员4.1.4各部手册管理人员1旗开得胜4.2职责4.2.1质量部:a)负责组织编写、修订、报批维修系统手册体系内综合类手册;b)负责协调处理局方、公司运行标准部、各职能部门、各维修单位或任何个人对手册体系文件提出的意见或建议;c)负责组织贯彻落实维修系统管理手册体系文件;d)负责保存现行有效及历次修订内容的体系文件主本。
4.2.2各职能部门、各维修单位:a)负责组织编写、修订、报批维修系统手册体系内专项类手册;b)参加手册体系文件的编写和修订工作;c)负责收集手册体系文件在执行中存在的问题,提出书面修订意见;d)负责组织培训贯彻落实涉及本单位的各项管理规定和程序要求。
4.2.3机务培训部:根据需要组织手册程序培训。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
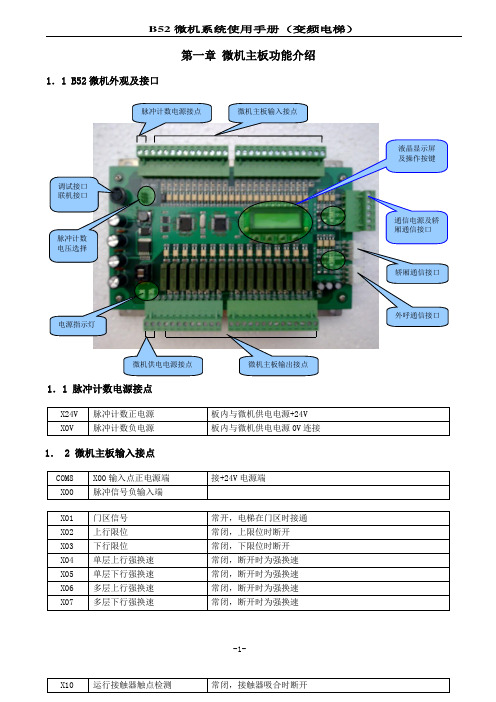
第一章微机主板功能介绍1.1 B52微机外观及接口电源指示灯1.1 脉冲计数电源接点24V 脉冲计数正电源板内与微机供电电源+24V X0V 脉冲计数负电源板内与微机供电电源0V连接1.2 微机主板输入接点COM8 X00输入点正电源端接+24V电源端X00 脉冲信号负输入端X01 门区信号常开,电梯在门区时接通X02 上行限位常闭,上限位时断开X03 下行限位常闭,下限位时断开X04 单层上行强换速常闭,断开时为强换速X05 单层下行强换速常闭,断开时为强换速X06 多层上行强换速常闭,断开时为强换速X07 多层下行强换速常闭,断开时为强换速X10 运行接触器触点检测常闭,接触器吸合时断开X11 抱闸接触器触点检测常闭,接触器吸合时断开X12 机械抱闸开关检测常闭,抱闸打开时断开X13 变频器故障检测常闭,故障时断开X14 变频器运行中信号常开,变频器运行中时接通X15 轿门锁回路常开,轿门锁回路正常时接通X16 厅门锁回路常开,厅门锁回路正常时接通X17 安全回路检测常开,安全回路正常时接通X20 检修/正常选择断开时为检修状态,接通时为正常状态X21 检修慢上检修状态下,接通时电梯检修上行X22 检修慢下检修状态下,接通时电梯检修下行X23 主板消防开关常开,接通时进入消防状态X24 主板锁梯开关 / 多功能常开,接通时进入锁梯状态 / 多功能参考[8E]菜单 X25 主板超载信号常开,接通时进入超载状态X26 主板光幕信号常开,接通时光幕起作用X27 主板司机信号 / 多功能常开,接通时进入司机状态 / 多功能参考[8E]菜单 COM7 X01-X27输入点正电源端接24V电源正及1.3微机主板输出接点Y00 电梯上行控制接变频器上行控制输入点Y01 电梯下行控制接变频器下行控制输入点COM0 Y00-Y01公共接点Y02 控制变频器组合/基极封锁信号Y03 控制变频器组合信号Y04 控制变频器组合信号Y05 控制变频器组合信号COM1 Y02-Y05公共接点Y06 消防联锁输出/多功能多功能参考[8E]菜单COM2 Y06公共接点Y07 主板到站钟输出/多功能多功能参考[8E]菜单COM3 Y07公共接点Y10 锁梯接触器输出Y11 运行接触器输出Y12 主抱闸接触器输出Y13 副抱闸接触器输出COM4 Y10-Y13公共接点Y14 主开门输出Y15 主关门输出COM5 Y14-Y15公共接点Y16 副开门输出Y17 副关门输出COM5 Y16-Y17公共接点1.4 微机主板供电接点+24V 微机主板供电正电源接24V稳压电源正极0V 微机主板供电负电源接24V稳压电源负极1.5通信供电电源及轿厢通信接口VCC 串行通信板供电正电源接开关电源+24V端GND 串行通信板供电负电源接开关电源0V端VCC 轿厢通信板供电正电源接轿厢通信板VCC端TP1 轿厢通信板通信信号接轿厢通信板TP1TD1 轿厢通信板通信信号接轿厢通信板TD1GND 轿厢通信板供电负电源接轿厢通信板GND1.6 轿厢通信接口VCC 轿厢通信板供电正电源接轿厢通信板VCC端TP1 轿厢通信板通信信号接轿厢通信板TP1TD1 轿厢通信板通信信号接轿厢通信板TD1GND 轿厢通信板供电负电源接轿厢通信板GND1.7 外呼通信接口VCC 外呼通信板供电正电源接外呼通信板VCC端TP2 外呼通信板通信信号接外呼通信板TP2TD2 外呼通信板通信信号接外呼通信板TD2GND 外呼通信板供电负电源接外呼通信板GND1.8 调试接口及联机接口连接手持操作器,电脑调试通信线,并联线或群控线1.9 脉冲计数电压选择选择24V脉冲计数选择12V脉冲计数选择5V脉冲计数选择UVW脉冲计数1.10 液晶显示屏及操作按键微机自带调试操作器,用于设置微机工作参数或监视微机工作数据。
如下图1.10.1显示电梯层站内容如下,如果用户需要显示字符下表没有,请与供应商联系: [ 1],[ 2],[ 3],[ 4],[ 5],[ 6],[ 7],[ 8],[ 9],[ 10],[ 11],[ 12][ 13],[ 14],[ 15],[ 16],[ 17],[ 18],[ 19],[ 20],[ 21],[ 22],[ 23],[ 24][ 25],[ 26],[ 27],[ 28],[ 29],[ 30],[ 31],[ 32],[ -1],[ -2],[ -3],[ -4][ -5],[ -6],[ -7],[ -8],[ -9],[ A],[ 3A],[13A],[ B],[ B1],[ B2],[ B3][ E],[ F],[ G],[ H],[ H1],[ H2],[ H3],[ P],[ P1],[ P2],[ P3],[ 0][ 3B],[13B],[ TX],[ ]1.10.2 显示电梯运行状态如下:[LEARN]学习 [ LOCK]锁梯 [ MEN ]司机 [ INS ]检修[ AUTO]正常 [ BASE]返基站 [ DIR ]直驶 [ ERR ]故障[ FIRE]消防 [ HELP]自救1.10.3 显示电梯运行动作内容如下:[-V0-]爬行速运行 [-V1-]单层速运行 [-V2-]多层速运行 [-V3-]最高速运行[-VN-]再平层运行 [-VI-]检修速运行 [WAIT]电梯候梯中 [LEVE]电梯在门区[-DO-]电梯开门中 [-DC-]电梯关门中 [-DE-]已开门到位第二章微机通信板功能介绍一.轿厢通信板功能及说明步通信接口:VCC:接微机轿厢通信接口TP1:接微机轿厢通信接口二.外呼通信板功能及说明三.语音报站板功能及说明第三章微机菜单功能及操作说明1、主菜单功能及操作说明1.1、[10]菜单功能及操作说明1.2、[20]菜单功能及操作说明1.3、[30] 菜单功能及操作说明1.4、[40] 菜单功能及操作说明1.5、[50] 菜单功能及操作说明1.6、[60] 菜单功能及操作说明1.7、[70] 故障记录菜单功能及操作1.8、[80][83] 内部菜单功能及操作1.9、[90] 井道数据功能及操作2、数据修改方法及操作说明2.1、数据修改方法1,以[11] 菜单为例:2.2、数据修改方法2,以[45] 菜单为例:2.3、数据修改方法3,以[21] 菜单为例:2.4、数据修改方法4,以[8D] 菜单为例:3、[53]菜单:变频器选择及输出点定义微机输出端端子安川变频器Y05 Y04 Y03 Y02 基极封锁 1 0 0 0检修速度0 1 0 0多层速度0 0 1 1单层速度0 0 1 0爬行速度0 0 0 1微机输出端端子富士变频器Y30 Y31 Y32 Y33 基极封锁 1 0 0 0检修速度0 1 0 0多层速度0 0 1 1单层速度0 0 1 0爬行速度0 0 0 1微机输出端端子科比变频器Y30 Y31 Y32 Y33 基极封锁 1 0 0 0检修速度0 1 0 0多层速度0 0 1 1单层速度0 0 1 0爬行速度0 0 0 1微机输出端端子西威变频器Y30 Y31 Y32 Y33 基极封锁 1 0 0 0检修速度0 1 0 0多层速度0 0 1 1单层速度0 0 1 0爬行速度0 0 0 1微机输出端端子FB10变频器Y30 Y31 Y32 Y33 检修速度0 1 0 0多层速度0 0 1 1单层速度0 0 1 0爬行速度0 0 0 1 -21-4、[8D]菜单:自定义速度组合表(类似二进制码)举例1:举例2:说明:[53]菜单选择“-1-”时,Y02固定为基极封锁输出-22-VI V2 V1 V0 自定义速度[1]或[2] [ ] [ ] [ ] [ ] 设[ ]为 Y05 Y04 Y03 Y02 [0] 0 0 0 0[1] 0 0 0 1 [2] 0 0 1 0 [3] 0 0 1 1 [4] 0 1 0 0 [5] 0 1 0 1 [6] 0 1 1 0 [7] 0 1 1 1 [8] 1 0 0 0 [9] 1 0 0 1 [A] 1 0 1 0 [B] 1 0 1[C] 1 1 0 0 [D] 1 1 0 1[E] 1 1 1 0 [F] 1 1 1 1速度组合输出状态电梯速度 设定值 Y05 Y04 Y03 Y02 [VI] 1 0 0 0 1 [V2] A 1 0 1 0[V1] C 1 1 0 0 [V0] 8 1 0 0 0 速度组合输出状态电梯速度 设定值 Y05 Y04 Y03 Y02 [VI] 8 1 0 0 0 [V2] 5 0 1 0 1[V1] 3 0 0 1 1 [V0] 1 0 0 0 15、[83] 菜单功能说明:(01):0--无召梯时关门候梯1--无召梯时开门候梯(02):0--两门同时开门或关门1--根据前后门选择先开前门或后门,在先选门开门状态下再按开门按钮开后选门(03):0--轿厢通信板(P15)为轿内长时关门按钮1--轿厢通信板(P15)为轿内锁梯按钮(04):0--关门锁梯1--开门锁梯(05):0--正常输出关门信号1--根据(06)输出关门信号(06):0--(05)为“1”时,有方向时输出关门信号1--(05)为“1”时,关门后保持输出关门信号(07)0--超载时不消号并且可以登记1--超载时消号并且不可以登记(08):0--反向消内选功能已设置1--反向消内选功能被取消(09):0--取消光幕防捣乱1--设置光幕防捣乱,连续开关门次光幕无感应则消内选登记信号(10):0--选择功能(11)1--司机状态下点动关门(按关门按钮关门,关门到位前放开按钮即停止动作) (11):0--司机状态下按关门按钮关门,关门到位前放开按钮即开门1--司机状态下按关门按钮关门,关门到位前放开按钮保持关门至到位(12):0--司机状态下外召信号顺向截车1--司机状态下外召信号不截车(13):0--消防状态下设为消防专用电梯1--消防状态下设为非消防专用电梯(14):0--消防状态下光幕不起作用1--消防状态下光幕起作用(15):0--消防状态下设置蜂鸣1--消防状态下取消蜂鸣(16):0--消防状态下国内模式;1--消防状态下香港模式;*****(17):0--检修状态下允许点动关门1--检修状态下取消点动关门(18):0--以爬行速度自救1--以检修速度自救(19):0--电梯不在门区,门锁断开,则关门自救1--电梯不在门区,门锁断开,不关门自救(20):0--无方向时输出基极封锁*****1--有方向时输出基极封锁(21):0--自动状态下自动运行3000次被取消1--自动状态下自动运行3000次被设置(22):0--未定义1--未定义(23):0--脉冲计数检测功能被设置1--脉冲计数检测功能被取消(24):0--设置内选板通信故障检测1--取消内选板通信故障检测-23-第四章故障说明及处理方法故障代码说明处理方法E1 安全回路断开检查安全回路各环节,并将其排除,安全回路恢复正常后,自动解除故障E2 门机信号故障检查门机,门锁接通或按开关门按钮,消除故障显示E3 内选通信出错检查内选通信,内选通信正常及按开或关门按钮,消除故障E4 无脉冲输入检查脉冲计数连接线E5 运行接触器触点粘死检查运行接触是否粘连。