第五章 线性振动的近似计算方法
振动力学3

解:若选取的假设模态更接近真 实模态,令
1 1.8 2
T
T
2 k 1 1.8 2 1 T 0 K R T M 1 T m 1 1.8 2 0 0
1 3 2 0 1 0
0 1 2 1.8 2 2 0 1 0 1.8 2 2
j
令 A ,利用
2 T K N diag 12 n N
M N E
T N
导出
aT T K N a aT Ka R T TN T a N M N a a Ma
a
j 1 n 2 j
n
2 j
a
j 1
2 j
得出的瑞利商不是系统的任一阶固有频率的平方,介于系统的最 低和最高固有频率的平方 12 和n
1.瑞利法
瑞利法是基于能量原理的一种近似方法。 利用瑞利法计算单自由度系统的等效质量和固有频率。对于多 自由度系统,可用于计算系统的基频,算出的近似值为实际基频的 上限。与邓克利法算出的基频下限配合,可以估计实际基频的大致 范围。 设n个自由度振动系统,系统的动能和势能 T
1 T 1 x Mx , V xT Kx 2 2
代入 K T K , M T M 得
1 0 0 M m 0 1 0 0 0 2
非线性振动

2 n A cos t arctan 2 2 1 2 1 2 2 i n n n
1
非线性振动
Part1 非线性分析计算方法
刘延柱、陈立群一书中主要的非线性方程式为:
( cos t )u 0 ,表示参数振动 Mathieu 方程 u
2 2 (t ) n 变形为 x(t ) 2n x x(t ) n A cos t
通解 X cos(t ) , 表响应对激励的滞后:
通解 X1 为: x
2 0
v n x0 0
2 d
2
v n x0 e nt cos d t 0 ,瞬态响应,逐步衰减。 d
2
2u u3 0 ,带有平方或立方非线性项 Duffing 振子 u
2u u u F cos(t ) 受外部激励的 Duffing 方程 u
2 3
2 u u u u F cos(t ) 具有稳定极限环和慨周期运动以及混沌运动 u
取决于系统阻尼比与固有频率和激励频率的关系,有
arctan
2 / 0 2 1 2 / 0
1
来自百度文库
稳态相应振幅与激励振幅的比值有
A2 B
机械振动学基础知识振动系统的线性与非线性模拟
机械振动学基础知识振动系统的线性与非线
性模拟
机械振动学是力学的一个分支,主要研究物体在外力作用下的振动
规律。振动系统是机械振动学中的一个重要概念,它由质点(或刚体)、弹簧、阻尼器等元件组成。振动系统可以分为线性和非线性两类,本文将从基础知识入手,探讨振动系统的线性和非线性模拟方法。
1.线性振动系统
线性振动系统是指系统的运动方程为线性方程的振动系统。“线性”
即指系统的运动方程满足叠加原理,具有相对简单的动力学特性。线
性振动系统的模拟方法多为以二阶常微分方程为代表的系统状态空间
方程,通过求解状态空间方程可以得到系统的时间响应和频率响应。
2.非线性振动系统
非线性振动系统是指系统的运动方程为非线性方程的振动系统。“非线性”即指系统的运动方程不能直接叠加或比例,并且系统的动力
学特性较为复杂。非线性振动系统的模拟方法相对复杂,通常需要采
用数值模拟、仿真等方法进行分析。
3.模拟方法比较
线性振动系统的模拟方法相对直观简单,在处理简单振动问题时具
有一定的优势。通过求解线性微分方程可以得到系统的精确解,便于
分析系统的稳定性和响应特性。而非线性振动系统的模拟方法更多依
赖于数值计算,需要考虑系统的各种非线性因素,如摩擦、接触、非线性弹簧等,对于系统的建模和仿真要求较高。
4.实际应用
在工程实践中,振动系统的模拟对于设计和分析振动系统具有重要意义。在设计机械结构、振动降噪、控制系统等领域,振动系统的模拟可以帮助工程师预测系统的振动响应,指导系统的优化设计。通过模拟线性和非线性振动系统,工程师可以更好地理解系统的动力学行为,提高设计效率和准确性。
理论力学 第5章 小振动
•牛顿力学
•牛顿第二定律 •动量定理 •动能定理
•分析力学
•动力学普遍方程 •拉格朗日方程
2. 单自由度系统的小振源自文库 •牛顿力学
2. 单自由度系统的小振动 •分析力学
2 v 2 l 2
(1)动能:
1 2 1 2 2 T mv ml 2 2
V mgl cos
(2)势能:(以固定点所在平面为重力势能零点) (3)拉格朗日函数: L T V =
理论力学
Theoretical Mechanics
南京大学物理学院 2012-2013学年第二学期
第五章 小振动
1. 机械振动基础 2. 单自由度系统的小振动 3. 多自由度系统的小振动 4. 阻尼振动 5. 受迫振动
1. 机械振动基础
•振动: 描述系统状态的参量(如位移、温度、电压、声压、 波函数)在某一基准值附近往复变化的过程。 •机械振动: 力学系统中物体(或物体的某一部分)在某一中 心位置两侧的往复运动。
2 (0 mgl / I )
2. 单自由度系统的小振动
例1:倒立摆(inverted pendulum)分析
非稳态平衡,平衡位形是V(q)的局域极大点
2. 单自由度系统的小振动
其中
拉格朗日函数:
2. 单自由度系统的小振动
代入拉格朗日方程
机械设计手册:单行本 机械振动 机架设计(第六版)
7.1远超共振惯性振动机动力参数设计示例 7.2惯性共振式振动机动力参数设计示例 7.3弹性连杆式振动机动力参数设计示例
8.1多轴式惯性振动机 8.2混振动的设计例 8.3利用振动的拉拔 8.4振动时效技术应用 8.5声波钻进
9.1三相异步振动电机 9.2仓壁振动器 9.3橡胶——金属螺旋复合弹簧
3.1许用应力 3.2起重机钢架的安全系数和许用应力 3.3铆焊连接基本许用应力 3.4极限状态设计法
4.1选取力学模型的原则 4.2支座的简化 4.3结点的简化 4.4构件的简化 4.5简化综述及举例
5.1用于梁和刚架或桁架的支座 5.2用于柱和刚架的支座
1梁的设计
2梁的计算
1.1纵梁的结构设计 1.2主梁的上拱高度 1.3端梁的结构设计 1.4梁的整体稳定性 1.5梁的局部稳定性 1.6梁的设计布置原则 1.7举例
8其他一些机械 2
振动的应用实 例
3
9主要零部件
4
10振动给料机
5
11利用振动来 监测缆索拉力
1.1振动机械的用途及工艺特性 1.2振动机械的组成 1.3振动机械的频率特性及结构特征
2.1机械振动指数 2.2物料的滑行运动 2.3物料抛掷指数 2.4常用振动机的振动参数 2.5物料平均速度 2.6输送能力与输送槽体尺寸的确定 2.7物料的等效参振质量和等效阻尼系数 2.8振动系统的计算质量 2.9激振力和功率
振动阻尼系数的计算公式

振动阻尼系数的计算公式
振动阻尼是指在振动过程中由于能量耗散而导致振动幅度的减小。它可以用振动阻尼系数来表示,也称为阻尼比。振动阻尼系数的计算公式与阻尼模型相关,常见的有线性阻尼、粘性阻尼和柯西阻尼等。下面将分别介绍这三种阻尼模型及其相应的计算公式。
一、线性阻尼模型
线性阻尼是指振动系统的阻尼力与振动速度成正比。在线性阻尼模型下,振动阻尼系数的计算公式为:
ζ=c/(2*√(m*k))
其中,ζ为振动阻尼系数,c为阻尼力系数,m为系统的质量,k为系统的刚度。
二、粘性阻尼模型
粘性阻尼是指振动系统的阻尼力与振动速度成正比,并且方向与振动速度相反。在粘性阻尼模型下,振动阻尼系数的计算公式为:ζ=c/(2*√(m*k))
其中,ζ为振动阻尼系数,c为阻尼力系数,m为系统的质量,k为系统的刚度。
三、柯西阻尼模型
柯西阻尼是指振动系统受到的阻尼力与速度的平方成正比,并且方向与速度相反。在柯西阻尼模型下,振动阻尼系数的计算公式为:ζ=2*β/ωn
其中,ζ为振动阻尼系数,β为系统的柯西阻尼系数,ωn为系统
的固有频率。
需要注意的是,以上三种阻尼模型是理想化的情况,真实的振动系统
常常存在非线性的阻尼特性。此时,振动阻尼的计算会更加复杂,需要借
助数值模拟或实验测量等手段来获得准确的结果。
在实际工程中,振动阻尼系数的计算是非常重要的,它可以帮助工程
师评估和控制振动系统的稳定性和性能。通过合理的选择和调整阻尼系数,可以减小系统的振动幅度,提高系统的抗振能力。因此,对振动阻尼系数
有深入的理解和掌握是非常有益的。
总之,振动阻尼系数的计算公式根据不同的阻尼模型有所不同,包括
《振动力学结构力学》课件

2
来分析振动系统。
介绍如何使用强度准则等方法来计算
阻尼比,并将其应用在结构设计中。
3
振动测试技术
讨论了如何通过测试和测量来评估和 优化结构阻尼,以及如何使用主动振 动控制。
地震响应分析
地震的概念
解释了地震是如何发生的,以 及为什么结构必须考虑地震响 应。
地震波的类型
结构抗震
探索了地震波的前、横、纵波, 以及它们对结构的影响。
描述了如何通过结构修改来提 高结构的抗震能力。
稳定性分析和控制方法
1 平衡状态和稳定性
介绍了结构的平衡状态和稳定边界,以及如何使用状态空间法和增益调节来分析和控制。
2 非线性稳定性
讨论了非线性系统的稳定性和卡亚平面,并介绍了极限环的概念。
3 动态响应
演示了如何用MATLAB分析系统的稳态和动态响应,以及如何应用控制策略来改进系统响 应。
振动力学结构力学
本课程通过多种方式介绍了结构力学和振动学的基本知识,以及如何应用这 些知识来分析和控制结构振动。
振动基础知识
1
简介
解释了为什么振动是如此重要以及振
基础概念
2
动分析所需的数学知识。
探索了相位、频率、振幅等基本术语
Baidu Nhomakorabea
和概念。
3
谐波振动
介绍了自然频率、阻尼比、共振等概
第五章 机械振动
二、描述谐振动的三个物理量
1、振幅A──由初始条件x0、v0决定 A xmax
x v
Acos(t 0 ) Asin(t 0
)
令 t=0 则
x0 Ac os0 (1)
v0
As
i
n 0
(2)
12 22
得
A
x02
v02
2
2、周期T(频率、圆频率ω 、固有圆频率)
(1)周期T :完成一次完全振动所需的时间
2 g
l
2 k
m
T 2
l g
T 2
m k
15
3、相位:(位——位置;相——变化的态势)
相位是描述系统的机械运动状态的物理量。(相又 指月相之相──取其具有周期性。)
1
x v
Acos(t 0 ) Asin(t
0
)
能确定系统运动状态,而又能反映其周期性特征的是
t 0
(2) 初位相t=0时的位相0
=vmcos(t+0+π/2) a(t)=-A2cos(t+0)
=amcos(t+0±π) 设0=0
x
0 v
0 a
0
T
4
A t
v
t
x
a
t
三种描述方法(即:三角函数、函数图象、旋转矢量)
声学基础第五章非线性声学简介

第五章 非线性声学简介
到目前为止,我们在讨论声源的振动和声的传播等问题中,数学上一直采用线性近似。正因为如此,我们一直对所讨论的问题要提出一些限制性条件,如小振幅声波假设,其目的是在线性近似下简化问题的数学处理。当所研究的问题超越了规定的限制性条件,如果我们仍然采用线性近似方法处理,则势必会出现太大的误差,从而无法获得满意的结果。因此,在这样的情形下,我们只好把以前进行线性近似时舍弃的高阶量再“恢复”回来一些,直到获得的结果和精度满足我们的要求。这就是非线性方法,对于声学问题就是非线性声学。
使声学问题超越线性范围而产生非线性的因素主要有两部分,一是声源的非线性振动,即振动的弹性恢复力偏离胡克定律。二是声波在介质中的传播特性引起的非线性,最典型的例子是当声扰动引起的粒子振动速度接近或达到声传播速度时,描述声传播规律的波动方程就不得不保留一定的非线性项。这在以下的内容中将会详细讨论。
非线性声学的内容同样离不开介绍介质特性,理想介质的非线性声学相对简单,而粘滞性介质的非线性声学就要复杂和繁琐的多。
§5.1 声波在理想介质中非线性行为
5.1.1 理想介质的非线性波动方程及其解的形式 5.1.1.1理想气体介质
在理想介质中,小振幅声波的一维运动方程为dv p dt x ρ∂=-∂或1dv
p dt
x ρ∂=-
∂ 由于质点振速v 本身就是时间和位置的函数,即(,)v v x t =,因此
dv v v dx v v
v dt t x dt t x
∂∂∂∂=+=+=∂∂∂∂本地加速度+迁移加速度 满足小振幅声波假设,意味着v c ,上式中的v v x ∂∂项为二阶小量,线性近似时可将其忽略。在有限振幅(非线性)声波中,质点振速v 与声传播速度c 的量值相当,该项不容忽略,因此有限振幅声波的运动方程为
航天航空学院研究生课程简介
目 录
061001 振动理论 (3)
061002 有限元原理及工程应用 (3)
062019 非线性连续介质力学 (3)
062020 高等断裂力学 (4)
062021 非线性动力学现代理论 (4)
062022 动力学系统建模 (5)
062023 现代振动测试技术 (5)
062024 固体力学非线性数值方法 (5)
062025 电磁机械力学 (6)
062027 高等计算力学 (6)
062028 工程结构动力分析 (7)
062029 现代控制理论基础 (7)
062031 振动力学实验技术 (8)
062032 振动信号数据处理 (8)
062037 固体中的超声波 (9)
062041 模态分析及综合应用技术 (9)
062042 智能结构与振动控制 (10)
062043 有限元方法与ANSYS应用 (10)
062044 现代力学测量技术 (11)
062046 复合材料力学分析 (11)
062048 工程疲劳与断裂 (12)
062053 材料的力学行为 (12)
062054 飞行器总体设计 (12)
062055 高等飞行动力学 (13)
062057 复合材料结构设计 (13)
062059 飞行器结构动力分析原理与实践 (14)
062060 可靠性设计基础 (14)
062061 气动弹性原理 (14)
062063 计算流固耦合力学 (15)
062097 飞行器气动设计原理与实践 (15)
062098 结构多场数值分析与设计 (16)
062099 飞行器控制系统设计与实践 (16)
062100 力学测量与无损检测 (17)
结构自振周期的近似计算
3.5.3 结构自振周期的近似计算
通过结构的频率方程求自振周期比较复杂,这里介绍几种近似计算方法。
动能为
势能为
由能量守恒,有
例.已知:解:
3.6 竖向地震作用《规范》规定:设防烈度为8度和9度区的大跨度屋盖结构、长悬臂结构、烟囱及类似高耸结构和9度区的高层建筑,应考虑竖向地震作用。
效应:使建筑物上下颠簸
F F
3.7 结构平扭耦合地震反应与双向水平地震影响 规范规定:
对于质量及刚度明显
不均匀、不对称的结
构,应考虑水平地震作
m
用的扭转影响。
刚心
)(t
u
g
质心
分析过程:
[
受弯钢筋凝土构件的滞回曲线
滞回模型:描述结构或构件滞回关系的数学模型。
双线性模型
双线性模型一般适
用于钢结构梁、柱、节
点域构件。
钢筋混凝土梁、
柱、墙等一般采用退化
三线性模型。
退化三线性模型
结构非弹性地震反应分析的简化方法
适用范围:
不超过12层且层刚度无突变的钢筋混凝土框架结构和填充墙钢筋混凝土框架结构;
不超过20层且层刚度无突变的钢框架结构和支撑钢框架结构;
式中:
N N a h +−5.0)(/---系数,混凝土强度等级不超过C50时,取1.0,C80时为0.94,
by
二、结构薄弱层位置判别
结构薄弱层:塑性变形集中的楼层,即ζy 最小
或相对较小的楼层
对于ζ
y 沿高度
分布均匀的框架结构,底层作为薄弱层。
3.9 结构抗震验算
3.9.1 结构抗震计算方法原则
(1 ) 一般情况下,应允许在建筑结构的两个主轴方向分
别计算水平地震作用,并进行抗震验算各方向的水平地
震作用应由该方向抗侧力构件承担。
(2 )有斜交抗侧力构件的结构,当相交角度大于15°时,应
机械振动学 第五章_两自由度系统振动(讲)
第五章两自由度系统振动
§5-1 概述
单自由度系统的振动理论是振动理论的基础。在实际工程问题中,还经常会遇到一些不能简化为单自由度系统的振动问题,因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。从单自由度系统到两自由度系统,振动的性质和研究的方法有质的不同。研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
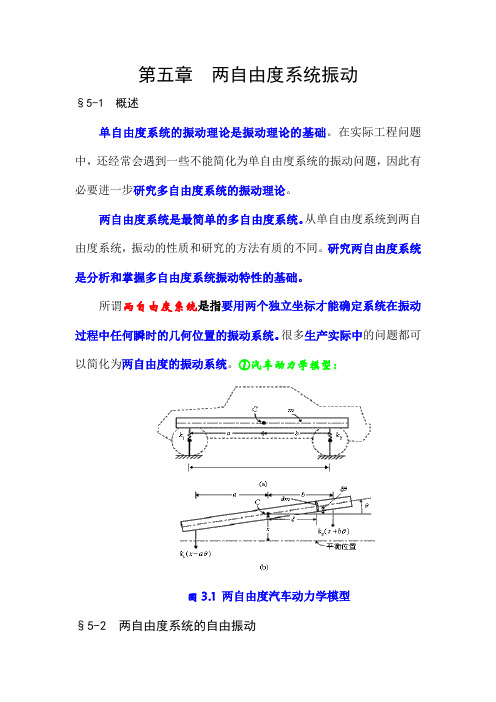
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。很多生产实际中的问题都可以简化为两自由度的振动系统。①汽车动力学模型:
图3.1两自由度汽车动力学模型
§5-2 两自由度系统的自由振动
一、系统的运动微分方程
②以图3.2的双弹簧质量系统为例。设弹簧的刚度分别为k 1和
k 2,质量为m 1、m 2。质量的位移分别用x 1和x 2来表示,并以静平衡位
置为坐标原点,以向下为正方向。
(分析)在振动过程中的任一瞬间t ,m 1和m 2的位移分别为x 1及x 2。此时,在质量m 1上作用有弹性恢复力()12211x x k x k -及,在质量m 2上作用有弹性恢复力()122x x k -。这些力的作用方向如图所示。
应用牛顿运动定律,可建立该系统的振动微分方程式:
()()⎭
⎬⎫=-+=--+00122221221111x x k x m x x k x k x
m (3.1)
令
2
2
12121,,m k c m k b m k k a =
=+=
则(3.1)式可改写成如下形式:
()()⎭
⎬⎫=-+=--+00122221221111x x k x m x x k x k x
非线性振动与线性振动对比ppt资料

c
s
r
e
c
r
k
s
r
Three Elements
Amplitude, Frequency
and Phase (difference)
P
mx cx
em 2 cos
x
P
my cy
em 2 sin
y
Vibrating
System
k
k
m
)
k
1 2
1 2
2
2
8
例:已知质量m, 杆长l, 求系统运动方程
系统的动能和势能
11 2
1
2
T
( ml
)
; V
mgl
(
1
cos
)
23
2
o
2
l gsin 0
3
非线性运动形式通常无法用
初等函数表示
非线性振动仍然可以用周期、振幅、
相位等来刻画, 方法?
9
怎样判断其路径?摆动周期的变化?
0
0m
c
k
k
c
2
2
2
传递矩阵法
R i 1
1 Ei I i
x 0
M i ( x)dx
x
R i 1
1 1 R M i 1 x QiR1 x 2 Ei I i 2Ei I i
yi ( x) y
R i 1
i ( x)dx
0
x
R yiR 1 i 1 x
1 1 2 R 3 M iR x Q x 1 i 1 2 Ei I i 6 Ei I i
I2
I3
假定一系列的试算频率,依次算出 Z1 ,Z 2 , Z3 ,并画出最右端 状态向量随频率的关系曲线; 由图可知,使剩余扭矩 M 3 为零的固有频率 为:
R
R
R
R
1 0,2 126 ,3 210
R R R Z , Z , Z 相应的各主振型由 1 2 3 中的
值确定,分
(i-1) li ki i
(i)
i
M
L i
iR 1
M
R i 1
iL
M iR I i
li ki
M iL
将任意截面上的转角和扭矩排成列向量即状态向量:Z ( , M )T
由于不计轴段的转动惯量,两边扭矩相等 轴段两边的转角有如下关系
iL iR 1
1 R M i 1 ki
(2)梁的横向弯曲振动系统
第五章 结的强迫振动响应分析
第五章 结构的强迫振动响应分析
§5.1 概述
如果结构已经用有限元方法进行了离散化,当一个结构系统受到外激励作用时,其响应就是一个多自由度系统的强迫振动问题的解。求解多自由度系统强迫振动响应的方法之一就是直接积分法。考虑到实际结构的高维数(自由度数很大)而给求解带来的困难,往往在实际求解中采用模态叠加法。直接积分法和模态叠加法这两种方法都可以得到具有相当精度的振动响应解,并且各有其特点。
§5.2 求解强迫振动响应的直接积分法
对动力学基本方程
)}({}]{[}]{[}]{[t P U K U C U M =++&&& (5-1)
进行直接积分,其含义是指在对方程进行积分之前,不对其进行任何形式的变换,在积分中,实际上是按时间步长逐步积分的。这样做的实质是基于如下考虑:
(1) 只在相隔t ∆的一些离散时间区间上、而不是在整个时间区间上的任一个
时刻t 上满足方程,即平衡是在求解区间上的一些离散时刻上获得的。 (2) 假定位移、速度、加速度在每一个时间区间t ∆内按一定规律变化,也正
是采用不同的变化形式,决定了各种直接积分解的精度、稳定性和求解速度。
首先,设}{}{}{0
00U U U &&&表示初始时刻(0=t )的位移、速度和加速度为已知向量,要求出从0=t 到T t =的解,则把时间段T 均分为n 个间隔n T t /=∆,所用的积分是在T t t Λ,2,∆∆上求方程的近似解。即要在t t t Λ,2,∆∆的解已知的情况下,求解t t ∆+时刻的解。
【中心差分法】
若基本方程式的平衡关系作为一个常系数微分方程组,则可以用任一种差分格式通过位移来表示速度和加速度。通常采用中心差分格式,这是一个行之有效的求解微分方程的格式。
随机震动-第五章 非线性随机振动
本章简单介绍非线性系统随机反应分析方法。
(1) 结构的非线性: 几何非线性——应变与位移之间的非线性。 材料非线性(物理非线性) ——应力与应变不服从
虎克定律。 阻尼非线性——非线性表现在阻尼项 刚度非线性——非线性表现在刚度项 滞变非线性——非线性表现在阻尼与刚度的偶合项
严格说,所有结构系统总不同程度地具有某种非线性。
•
•
{X1(t),, X n (t), X 1(t),, X n (t)}T
则方程(A)可化为
•
Y (t) f (Y ) G W (t)
(B)
式中
f
(Y
)
M
Y2 g 1
(Y
),
0
G
M
1
,
0 W (t) W1(t)
(2)当F(t)为向量正态过滤白噪声 并可表示为如下成形滤波器的向量平稳反应时:
0
h(
)E[F
(t
)]d
E[
X1
(t)]
0
h(
) E[ g (
X
0
(t
),
•
X
0
(t
))]d
其中
•
E[g( X0, X 0 )]
可按正态截断法降阶后由
X 0 (t)
和
•
X
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
线性振动的近似计算方法
线性振动的近似计算方法
在线性多自由度系统振动中,振动问题归结为刚度矩阵和 质量矩阵的广义特征值问题。
缺点之一:当系统自由度较大时,求解计算工作量非常大。 本章介绍几种近似计算方法,可作为实用的工程计算方法 对系统的振动特性作近似计算。
邓克利法,瑞利法,里茨法,传递矩阵法
所以 R( ) 12
得证!
愈接近系统的真实模态,算出的固有频率愈准确。
线性振动的近似计算方法 / 瑞利法
例:三自由度系统(教材P106算例)
1 x 1 0 0 2 1 0 x1 0 2 k 1 3 2 x2 0 m 0 1 0 x 3 x 0 0 2 0 2 2 x3 0
X 0 DX
作用力方程的特征值问题: Kφ 2 Mφ 位移方程的特征值问题:
Dφ φ
线性振动的近似计算方法 / 邓克利法
作用力方程的特征值问题: Kφ 2 Mφ
位移方程的特征值问题: 特征值: 关系:
Dφ φ
D=FM
2 2 12 2 n 2 i 1/ i
线性振动的近似计算方法 / 邓克利法
• 邓克利法
由邓克利(Dunkerley)在实验确定多圆盘的横向振动固有频率 时提出的 便于作为系统基频的计算公式
KX 0 自由振动作用力方程: MX
X Rn
X 0 左乘柔度矩阵F = K -1,位移方程: FMX
定义D=FM 为系统的动力矩阵
1 2 n
(基频) 对应着系统的第一阶固有频率
位移方程的最大特征根: 位移方程的特征方程:
1 1/ 12
D I 0
展开:
其中:
(1)n (n a1n1 an11 an ) 0
a1 (d11 d22 dnn ) trD
2 a j j 1
n
2 12 R( ) n
利用瑞利商估计系统的基频所得的结果必为实际基频的上限 解释: 例如 k=1
2 2 ) 瑞利商: R( ) ( 2 j k j 2 1 j 2 n
2 因为 2 j 1 0 ( j 2 ~ n)
利用瑞利商估计系统的基频所得的结果必为实际基频的上限
愈接近系统的真实模态,算出的固有频率愈准确。
线性振动的近似计算方法 / 瑞利法
T a T ΦN KΦN a a T Λa n 2 2 R( ) T T T a j j a ΦN MΦN a a Ia j 1
2 2 R( ) ( 2 j k ) j 2 k j 1 n
a 2j
j 1
n
a j j ak
2 2 R( ) k2 ( 2 j k ) j j 1
n
解释: 例如 k=1
a j j a1, j 2,, n
约去a1
2 2 2 2 2 2 2 2 2 2 a1212 a2 2 an n a1212 2 a1 2 n a1 n R( ) 2 2 2 2 2 2 2 a1 a2 an a12 2 a1 n a1
k m
k
m
2k
2m
采用常规方法,固有频率:1 0.3730 k / m 2 1.3213 k / m 3 2.0286 k / m 邓克利法: 当 m 单独存在时 2 k / m
1
k1k2 1 2 k 当 m2 单独存在时 k12 2 k12 / m k1 k2 2 1 1 1 1 5 2k k 2 k 3 当 m3 单独存在时 123 k123 k1 k2 k3 2k 5 5m
(1 ) ( )
2 1 2 2 2 n 2 2 1 2 n i 2 2 i 2 i 2 1
n
12
2 1
i 2
n
2 i
(i2 12 )
2 2 1 2 n
i2 (i2 12 )
f ii mi
i 1
n
如果只保留第 i 个质量,所得的单自由度系统的固有频率为: ki 1 2 i mi f ii mi n 1 1 1 1 2 将 i 代入: 2 2 2 2
i 1
i
1
2
n
对于梁结构系统,第二阶及第二阶以上的固有频率通常远大于 基频,因此左端可只保留基频项,有:
2 2
1 k F 1 1 k1
f11
m1
k2
m2
k1
m1
(1)只保留 m1 时 (2)只保留 m2 时
1 1 1 f 22 k1 k2 k12
k1
k2
m2
线性振动的近似计算方法 / 邓克利法
f m
i 1 i i 1 ii
n
n
i
i 1
n
1
2 i
(1) 1 N
( 2) N
( n) N
n
(1) ( 2) ( n) ΦN [ φN ,φ , , φ N N ]
a [a1, a2 ,, an ]T
j 1
T n a T ΦN KΦN a a T Λa 2 T 代入瑞利商: R( ) T T a2 j j a ΦN MΦN a a Ia j 1
比起 ak ,其它系数很小
a j j ak, j 1,2,, n, j k
代入,得:
2 2 R( ) k2 ( 2 j k ) j j 1 n
j 1
(k ) 因此,若 与φ 的差异为一阶小量,则瑞利商与 的差别为二阶 k2 小量。 2 2 对于基频的特殊情况,令k=1,则由于 j 1 0( j 2 ~ n) 瑞利商在基频处取极小值,
n
n
i
i 1
n
1
2 i
f ii mi
i 1
n
如果只保留第 i 个质量,所得的单自由度系统的固有频率为: ki 1 2 i mi f ii mi
例如:两自由度系统 柔度矩阵:
k1
1 1 k1 k 2 1 k1
1 k1
12
k1 m1 k 12 m2
机械能守恒
X Rn
主振动 : X φsin(t ) 1 T 1 T V X KX 动能与势能: T X MX 2 2 1 2 T 1 T Vmax φ Kφ 最大值: Tmax φ Mφ 2 2 φT Kφ Tmax Vmax R( φ) T 2 瑞利商 φ Mφ
线性振动的近似计算方法 / 瑞利法
瑞利商
φT Kφ R( φ) T 2 φ Mφ
R( φ( i ) )
对于第 i 阶模态:
φ
(i )T T
Kφ( i )
φ( i ) Mφ( i )
i2
当φ 为一般向量时(不是实际模态),总能展开为 n 个正 则模态的线性组合:
( j) aφ a2 φ +aNφ a φ j N ΦN a
(1)2[2 (d11 d22 ) (d11d22 d12 d21 )] 0
例如:d11 d12 0 d 21 d 22
线性振动的近似计算方法 / 邓克利法
特征方程: 其中:
(1)n (n a1n1 an11 an ) 0
1
2 1
1
2 1
1
2 2
1
n2
邓克利法
得到的基频是精确值的下限
线性振动的近似计算方法 / 邓克利法
i 1
n
1
2 i
1
1
2 1
1
1
2 2
1
1
n2
得到的基频是精确值的下限
1
2 1
2 1
源自文库
2 2
2 n
解释: 解得:
1
12
2 1
ab
a
1
2 2
1
代入邓克利法公式:
1
2 1
1
2 1
1
2 2
1
2 n
1 0.3535 k / m
线性振动的近似计算方法 / 瑞利法
• 瑞利法
基于能量原理的一种近似方法 可用于计算系统的基频 算出的近似值为实际基频的上限
配合邓克利法算出的基频下限,可以估计实际基频的大致范围。
KX 0 n 自由度保守系统: MX
a1 (d11 d22 dnn ) trD
trD tr ( FM ) f ii mi
i 1
n n
D=FM
n
当 M 为对角阵时:
特征方程又可写为: ( 1 )( 2 )( n ) 0 有:
n
a1 i trD f ii mi
i 2
n
线性振动的近似计算方法 / 瑞利法
T a T ΦN KΦN a a T Λa n 2 2 R( ) T T T a j j a ΦN MΦN a a Ia j 1 2 a j j 1 n
2 12 R( ) n
如果 接近第k阶真实模态
φ( k )
如果 接近第k阶真实模态
φ( k )
比起 ak ,其它系数很小
a j j ak, j 1,2,, n, j k
代入,得:
2 2 R( ) k2 ( 2 j k ) j j 1 n
j 1
线性振动的近似计算方法 / 瑞利法
2 R( ) a 2 j j j 1 n
1
2 3
1
2 n
1 ba
b
1
2 1
1
2 2
1
n2
因在邓克利法中忽略了a,因此所得结果为基频下限。
线性振动的近似计算方法 / 邓克利法
例:三自由度系统(教材P104算例)
1 x 1 0 0 2 1 0 x1 0 2 k 1 3 2 x2 0 m 0 1 0 x 3 x 0 0 2 0 2 2 x3 0
i 1 i 1
得:
f m
i 1 i i 1 ii
n
i
i 1
n
1
2 i
f ii mi
i 1
n
柔度系数 fii的物理意义:沿第i个坐标施加单位力时所产生 的第i个坐标的位移
i 1 / i2
线性振动的近似计算方法 / 邓克利法
f m
i 1 i i 1 ii
2 12 R( ) n
分析: 若将瑞利商右端分子内的所有 j 换为
1
n j 1 2 j 2 1 2 2 a j 1 j 1 n
由于 1 是最低阶固有频率
因此: R( ) a
φ(1) 由瑞利商公式知,当 确为第一阶模态时,有:
R( ) 12
因此,瑞利商的极小值为 12
同理可证明,瑞利商的极大值为 n
2
线性振动的近似计算方法 / 瑞利法
T a T ΦN KΦN a a T Λa n 2 2 R( ) T T T a j j a ΦN MΦN a a Ia j 1 2 a j j 1 n
2 12 R( ) n
2 2 可以证明, 和 分别为瑞利商的极小值和极大值 1 n
a
j 1
n
2 j
2 即: 12 R( ) n
线性振动的近似计算方法 / 瑞利法
T a T ΦN KΦN a a T Λa n 2 2 R( ) T T T a j j a ΦN MΦN a a Ia j 1 2 a j j 1 n
2 2 2 2 12 2 2 n n 2 2 1 2 n
分子上加减1项
2 2 2 2 2 2 2 2 2 2 2 2 12 2 2 n n ( 2 1 3212 n 1 ) ( 2 1 3212 n 1 ) 2 2 1 2 n