库卡外部自动运行模式的过程和配置2017
(完整版)KUKA机器人外部自动配置方法
机器人外部自动启动配置方法•不通过程序号而选定好要运行的程序的外部启动机器人通过下列步骤来外部启动机器人:步骤1、在T1模式下把用户程序按控制要求插入cell.src里,选定cell.src程序,把机器人运行模式切换到EXT_AUTO.步骤2、在机器人系统没有报错的条件下,PLC一上电就要给机器人发出$move_enable(要一直给)信号。
步骤3、PLC给完$move_enable信号500ms后再给机器人$drivers_off(要一直给)信号。
步骤4、PLC给完$drivers_off信号500ms后再给机器人$drivers_on信号。
当机器人接到$drivers_on后发出信号$peri_rdy给PLC,当PLC接到这个信号后要把 $drivers_on断开。
步骤5、PLC发给机器人$ext_start(脉冲信号)就可以启动机器人。
•通过程序号(不校验奇偶)来选定程序的外部启动机器人。
需要配置的信号:PRNO_FBIT:表示位字节的第一位。
例如,用$IN[11] ---$IN[17]来映射给变量PGNO,这时PRNO_FBIT为11,意思是PRNO_FBIT是这个区域的第一位。
PGNO_LENGTH:表示映射给变量PGNO的数据长度,以上例来说,这时PGNO_LENGTH为7,变量PGNO最大值为127.PGNO_PARITY:程序号奇偶位校验,没有特别要求,不需要校验的话该值设置为0.PGNO_VAILD:程序号有效,机器人信号输入端的位信号。
把位信号编号编写在其后面,如,用$IN[18]来表示此程序号有效的话,当$IN[18]为TRUE的时候,PLC发过来的程序号才有效。
PGNO_VAILD是个脉冲信号(脉宽1秒左右)。
每次改变程序号时,PLC都要让PGNO_VAILD为TRUE.否则机器人端的变量PGNO的值不会发生改变。
PGNO_REQ:机器人发给PLC的程序号请求信号,位信号。
KUKA机器人PLC外部自动控制运行

图I 1-1: PLC 连接 系统结构原理为了在KR C4 PLC 之间吏第)5利进行通讯.必须满足以下几点: ■ 外部自动运行方式:在该运行万式F 由一台主机或者PLC 翌制机器人系 统 ■ CELL.SRC :从外部迭择机話人程序的控制程序。
■ PLC 和机器人之间的信号交换:用于瓦置险入和输出端信号的外部自动运 行接口 : 发送至机器人的控屜信号(输入端);开始和停止信号、程序编号、 故障确认 机器人状态(皆出端):驱动装直状态、位置、故障等等。
从如茹启动程序的安全须知送择了 CELL 程序石必须执行BCO 运行。
「不 *土1如果迭定的运动语句包括PTP 运行梧令,則BCO 运行将作为 三£1 PTP 运动从实际位置移动到目标位侵。
狐果迭定的运动语句包 括LIN 或CIRC ,则BCO 运行将作为LIN 运动被执行。
規奈此运动,防止鱼 ?to 在BCO 运行中速度自动降低。
如果己执行了 BCO 运行,則在界部启动时便不再执行BGO 运行。
心警豈| 没有停止。
在冰部自动运行中没有BCO 运行。
这表明,机器人在启动之后 以褊程的速長(没有减速)到达第一个编程位置•并且在那里 外部程序启动的择作步骤 前提条件 ■ 在运行方式T 1或T 2 T■用于外部自动运行的输入/输出當和CELL.SRC 程序已配匱。
1. 在导航器中迭I? CELL.SRC 程序。
CELL 程序始终在目录KRC:\RI T2. 将程序倍率设定为100%。
(以上为洼议的设定但。
也可根抵需要设定其它数值。
)前言:本文档介绍KUKA 机器人作为下位机,PLC 作为上位机的 外部自动运行的设定方法以及程序结构11.1 由PLC 启动程洋的准备工作如果机器人进程应由一个中央位置进行控制(如由一个主机或PLC ).则这 一控制通过升都自动运行接□进行。
机器人与系统相连图I卜2:选择Oil和设簷手动倍翠1 HOV设置2 选定Cell.src3. 执行BCO运行:按住韵认开关。
KUKA机器人外部自动配置方法
KUKA外部自动配置方法[正文]章节一、引言本文档旨在介绍KUKA的外部自动配置方法。
通过该方法,用户可以自动设置和调整的各种参数,以满足特定的应用需求。
本文将详细介绍配置方法的步骤和注意事项。
章节二、配置准备在开始配置之前,需要准备以下工作:1、KUKA软件包2、与连接的计算机3、控制器的IP地质和用户名密码章节三、连接和计算机配置步骤如下:1、将和计算机通过以太网线连接。
2、在计算机上打开网络设置,配置IP地质和子网掩码,确保与处于同一局域网内。
3、确保控制器已开启,并保证用户名密码正确。
章节四、启动KUKA软件1、在计算机上安装KUKA软件包。
2、打开软件,并选择自动配置功能。
章节五、执行自动配置1、在自动配置功能中,选择连接的控制器。
2、开始自动配置按钮,系统将自动识别的型号和参数。
3、根据需要,设置的工作区域、速度、加速度等参数。
4、确认配置无误后,保存设置并退出自动配置功能。
章节六、验证配置结果1、重新启动控制器,确认配置的参数已成功生效。
2、运行简单的程序,观察的动作情况。
3、如有需要,可以通过手动调整参数进行微调。
章节七、安全注意事项在进行外部自动配置过程中,需要注意以下安全事项:1、在配置过程中,确保周围没有人员和障碍物。
2、了解的工作范围和安全边界,避免潜在的危险。
3、遵循KUKA官方的安全操作规范和指导文件。
[附件]本文档附带以下附件:1、KUKA外部自动配置软件包。
2、配置过程中可能用到的示例程序和文件。
[法律名词及注释]1、:指KUKA公司生产的工业,具有自主操作和控制能力。
2、自动配置:指通过计算机软件自动设置和调整的参数和配置。
3、IP地质:指网络中用来标识计算机或网络设备的数字地质。
4、用户名密码:指用来验证用户身份和控制权限的登录信息。
5、软件包:指一组相关软件程序的打包和发布形式。
[结束语]本文档提供了详细的KUKA外部自动配置方法,希望能够帮助用户快速、准确地完成的配置工作。
KUKA外部自动配置
• PGNO_FBIT_REFL 程序镜像第一位;为 正常使用该选项,变量 “REFLECT_PROG_NR”必须指定为“1”;
• ALARM_STOP _I 内部紧急关断;在内部 急停情况下复位该输出,正常为1,急停为0。
输出接口2及说明
• PRO_ACT 程序激活;如 果机器人在执行程序,则该 输出为真;
• PGNO_REQ 程序号请求; 请求PLC发送程序号;
• APPL_RUN 程序运行; 通过设定这个输出,设置机 器人控制器与PLC通讯,确定 程序正被执行的细节。
输出接口3及ห้องสมุดไป่ตู้明
• IN_HOME 在HOME位置;该输出与 PLC通讯,把机器人在HOME位置信号反 馈给PLC;
可以互相讨论下,但要小声点
机器人启动时序
1、T1模式下选择CELL程序,手动执行程序,注意中间路径,有时机器人不在HOME点附近,回原点的过 程中需慢速运行,直至到达BCO。
2、松开执行键,重新按下,信息栏出现“运行方式错误”提示,点击信息栏上的“全部OK”确认消息,松开 驱动及运行键,把机器人的运行模式打到“外部自动”即可。
操作步骤: 1、权限切换到“专家”用户组; 2、打开 程序CELL.SRC; 3. 在“CASE”段中将名称“EXAMPLE” 用相应的子程序名称进行替换 ,删除名称前 的分号; 4、关闭程序并保存更改; 5、若修改存在错误,则在保存后CELL程序 上会出现一个“×”标识,点击CELL,显 示出错误位置,对错误进行修改。
输出接口1及说明
• PERI_RDY 驱动装置就绪;通过设定这个 输出,设置机器人控制器与PLC通讯驱动器接 通的细节;
KUKA机器人外部自动配置方法
KUKA外部自动配置方法KUKA外部自动配置方法1.简介1.1 概述在KUKA应用中,需要进行外部自动配置来实现精确的环境控制和操作。
本文档详细介绍了KUKA的外部自动配置方法,包括安装和配置软件、硬件以及相关设置。
1.2 目的本文档的目的是提供给用户一个完整的指南,以便他们能够正确地进行KUKA的外部自动配置。
通过遵循本文档中的步骤和指导,用户可以准确地配置系统,提高生产效率。
2.硬件准备2.1 系统要求在进行外部自动配置之前,确保系统满足以下要求: - 硬件完好无损- 控制器和连接正常- 所需的传感器和设备已连接到控制器2.2 传感器和设备准备- 确保所有需要使用的传感器和设备已经准备就绪- 检查设备的连接线是否正常,插头是否插紧- 确保设备的电源正常工作3.软件安装与配置3.1 安装KUKA软件- 最新版本的KUKA软件,并按照安装向导进行安装- 确保安装过程中选择了所有需要的组件和插件3.2 配置控制器- 打开KUKA软件,并连接到相应的控制器- 进入控制器设置界面,根据需要配置网络连接、传感器接口和设备驱动4.外部自动配置过程4.1 配置环境参数- 根据实际应用需求,设置操作的环境参数,包括工作空间尺寸、安全区域等4.2 校准传感器- 对于使用的传感器,根据需要进行校准操作,以确保测量精度和准确性4.3 准备操作- 根据实际应用需求,编写操作程序,并进行相关设置4.4 测试与调试- 进行初步测试,验证是否正确执行所需的操作- 如果发现问题,进行适当的调试和错误修复5.附件本文档所涉及的附件包括:- KUKA软件安装包- 控制器设置文档- 外部自动配置操作手册6.法律名词及注释- 外部自动配置:指在应用中通过安装和配置软件、硬件来实现精确的环境控制和操作的过程。
- 传感器:用于测量和检测环境变量的装置或设备,例如距离传感器、力传感器等。
KUKA机器人外部自动配置

库卡机器人外部自动配置外部自动配置:系统结构外部自动配置,通过PLC调用机器人程序及启动停止。
∙系统结构原理为了在KR C4 和PLC之间能够顺利进行通讯,必须满足以下几点:∙外部自动运行方式:在该运行方式下由一台主机或者PLC控制机器人系统∙CELL.SRC:从外部选择机器人程序的控制程序。
∙PLC 和机器人之间的信号交换:用于配置输入和输出端信号的外部自动运行接口:∙发送至机器人的控制信号(输入端):开始和停止信号、程序编号、故障确认∙机器人状态(输出端):驱动装置状态、位置、故障等等。
从外部启动程序的安全须知∙选择了CELL 程序后必须执行BCO 运行。
∙Cell.src 控制程序管理由PLC 传输的程序号时,需要使用控制程序Cell.src。
该程序始终位于文件夹“R1” 中。
与任何常见的程序一样,Cell 程序也可以进行个性化调整,但程序的基本结构必须保持不变。
Cell程序的结构和功能:1、初始化和Home 位置∙初始化基坐标参数∙根据“Home” 位置检查机器人位置∙初始化外部自动运行接口2、无限循环:∙通过模块“P00” 询问程序号∙进入已经确定程序号的选择循环。
3 、程序号的选择循环∙根据程序号(保存在变量“PGNO” 中)跳转至相应的分支(“CASE”) 中。
∙记录在分支中的机器人程序即被运行。
∙无效的程序号会导致程序跳转至“ 默认的” 分支中。
∙运行成功结束后会自动重复这一循环。
更改CELL•操作步骤:1. 切换到“ 专家” 用户组2.打开CELL.SRC。
3.在“CASE” 段中将名称“EXAMPLE” 用•应从相应的程序编号调出的程序的•名称替换。
删除名称前的分号。
4. 关闭程序并保存更改更改外部自动接口,根据标准填写输入接口信号。
输出信号变量说明∙PERI_RDY 通过设定这个输出,机器人控制器与主计算机通讯驱动器接通的细节ALARM_STOP 在急停情况下复位该输出。
正常一直为1,急停为0 ∙USER_SAF如果安全栅栏监控开关被打开(在AUTO方式下)或使能开关被释放(在TEST方式下)复位该输出。
关于Step7与KUKA库卡机器人外部自动启动配置总结

9
9
三、机器人外部自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
PLC >> KRC4 KRC4 >> PLC
265
27th August 2014
27th August 2014
7
7
二、机器人外部运行控制接口配置
机器人通过外部PLC进行控制,需要配置外部控制运行接口和通讯连接,运行接口包括:IO运行 接口和安全回路接口。
通讯连接配置
1、在机器人试教器通过机器数据界面配置机器人名称
2、机器人IP地址设置
27th August 2014
8
8
27th August 2014
6
6
一、接口信号定义说明
接口信号说明:
KRC4 >> PLC ALARM_STOP- 紧急停止 该信号在机器人自身急停和外部急停下触发时,会发出一个报警停机控制信号。 USER_SAF- 操作人员防护装置 / 防护门 该信号在外部自动模式防护装置(如 安全门、卷帘门)被触犯的时机器人会发出一个用户安全停止控制信号。 PERI_RDY- 驱动装置准备就绪 通过设定此输出信号,机器人控制系统通知PLC控制系统机器人驱动装置已接通。 STOPMESS- 停止信息 该输出信号由机器人控制系统来设定,以向PLC显示出现了一条要求停住(Hold)机器人的信息提示。 (例如:紧急停止按键、运行开通或操作人员防护装置)。 I_O_ACTCONF- 外部自动运行激活 选择了外部自动运行这一运行方式并且输入端 $I_O_ACT 为 TRUE (默认为 $IN[1025])后,输出端为 TRUE,该信号需要配置成外部IO信号。 PRO_ACT- 程序激活 / 正在运行 当机器人程序启动运行后,始终给该输出端赋值。 PGNO_REQ- 程序号问询 该信号是机器人发出对PLC程序号的请求。 APPL_RUN- 应用程序在运行中 该信号是机器人发出告知PLC应用程序已经被执行。 IN_HOME- 机器人位于起始位置 (HOME) 该输出信号告知PLC,机器人正位于其起始位置 (HOME)。 ON_PATH- 机器人位于轨迹上 只要机器人位于编程设定的轨迹上,此输出信号即被赋值。
KUKA机器人外部自动配置
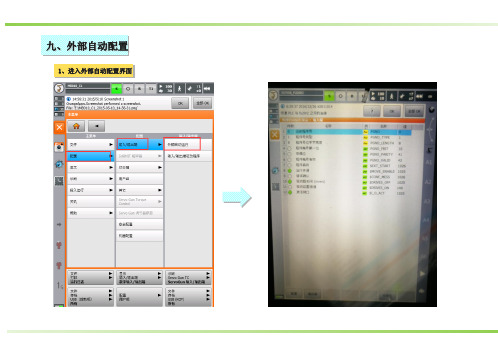
九、外部自动配置
4、输出信号-程序状态配置
程序激活 程序号请求 应用程序正在运行
九、外部自动配置
5、输出信号-机器人位置配置
机器人HO配置
机器人T1 机器人T2 机器人AUT 机器人外部自动
九、外部自动配置
九、外部自动配置
1、进入外部自动配置界面
九、外部自动配置
2、输入信号配置
程序号采用8421码 程序号镜像 程序号位数
程序号起始位 不启用奇偶位校验
程序号有效 程序号有效
运行开通 错误确认 电机下电 电机上电
九、外部自动配置
3、输出信号-启动条件配置
紧急关断环路关闭 操作人员防护装置开着
驱动装置待机状态
6、初始配置信号更改配置
1
2 3
将系统默认的伺服包 内的与外部自动配置 冲突的信号更改掉,
然后编译后导入
关于Step与KUKA库卡机器人外部自动启动配置总结PPT教案
第21页/共28页
22
六、PLC程序-机器人控制功能块配置
生产线启动机器人的外部启动条件 生产线停止机器人的外部停止条件 该信号常规为“1” 机器人全部工作结束反馈信号
机器人循环自动启动运行条件
第22页/共28页
23
六、PLC程序-机器人控制功能块配置
编写机器人运行过程中暂停条件 提供机器人在HMI翻页后的偏移地址
第27页/共28页
28
感谢您的观看!
第28页/共28页
2021/7/28
29
13
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
1. 接通驱动装置
第13页/共28页
14
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
4. 传递程序号并处理应用程序
第16页/共28页
17
五、机器人程序配置
机器人与PLC 的IO信号配置完成并且启动时序也清楚了,我们现在开始需要编写机器人启动调用 引导程序(即Cell程序)和PLC外部自动控制程序:
初始化 检查是否在原点
机器人回原点轨迹
调用1号程序
等待PLC程序启动信号
调用2号程序
调用3号程序
第17页/共28页
18
六、PLC程序-机器人控制功能块配置
此次KUKA机器人控制功能块采用Fiat提供的Comau机器人标准功能块(FB212),该功能块用 于KUKA机器人控制不能完全适用,但IO信号的时序逻辑基本相似;根据KUKA机器人的启动时序和 应用要求,我们在此块的基础上进行了修改和完善,使之成为GF2项目KUKA机器人PLC程序控制标 准功能块,修改后的功能块也经过了客户评审确认后投入正式使用。
kuka工业机器操作流程

kuka工业机器操作流程
KUKA工业机器是一种高度自动化的机器人系统,广泛应用于制
造业中的各种生产环节。
它具有高精度、高效率和高稳定性的特点,可以大大提高生产效率和产品质量。
在操作KUKA工业机器时,需要遵循一定的操作流程,以确保机器的正常运行和安全性。
首先,操作KUKA工业机器前,需要对机器进行检查和准备工作。
检查机器的各个部件是否完好无损,确保机器的正常运转。
同时,
需要检查机器的电源和气源是否正常,以确保机器能够正常供电和
运行。
在准备工作完成后,需要对机器进行开机操作,启动机器的
控制系统。
接下来,需要进行机器的编程设置。
根据生产任务的要求,需
要对机器进行编程设置,确定机器的运行轨迹和动作。
在编程设置
完成后,需要对机器进行调试和测试,确保机器的运行轨迹和动作
符合要求。
在机器的编程设置和调试完成后,可以开始正式操作机器。
在
操作机器时,需要注意机器的安全性和稳定性。
避免机器与其他设
备或人员发生碰撞,确保机器的正常运行。
同时,需要及时对机器
进行监控和维护,确保机器的正常运转。
在操作KUKA工业机器时,需要遵循一定的操作规程和流程,确
保机器的正常运行和安全性。
只有这样,才能充分发挥机器的作用,提高生产效率和产品质量。
KUKA工业机器的操作流程虽然复杂,但
只要按照规定的步骤进行操作,就能够顺利完成生产任务,实现生
产目标。
kuka机器人操作说明(草稿)(精选5篇)

kuka机器人操作说明(草稿)(精选5篇)第一篇:kuka机器人操作说明(草稿)系统自动运行操作流程(草稿)1,打开气源2,机器人开机3,T1模式,手动操作,进入专家界面(菜单“配置”下选择“用户组”,选择“专家“,输入密码“KUKA”)4,首先查看,菜单“显示”下选择“WINACPANEL”,查看PLC是否运行,或者查看三色灯黄灯是否亮5,然后,I/O重新配置,菜单“配置”下选择“输入输出”,再选择“输入输出重新配置” 6,选择CELL程序,手动运行CELL程序(RUN HOME时,即机器人运行到HOME时,要注意观察有无干涉),机器人到HOME点后,继续启动运行CELL程序(再按一次KCP上“启动“),运行到“AUTOEXT INI”这一行后;再选择菜单“程序“下其“程序复位”选项,然后,再手动运行CELL程序到HOME点这一行即可7,确认信息8,选择“EXT”模式,即外部自动模式9,按KOP上“复位”按钮(确认安全门)10,注塑机选择自动11,再按“启动”按钮12,再按注塑机上“启动”按钮13,系统启动另外:1,模具间有工件的处理:注塑机选择手动,再按一下KOP上“功能键“按钮;机器人手动回HOME点(注意干涉),CELL程序复位,系统再重新启动运行。
2,夹具掉件的处理:(掉件启用时)a,系统自动运行,掉件,确认信息,出现等待(WAIT FOR $IN[357]),此时,可以取消等待(按一下KOP上功能键),系统正常运行回HOME点(不带件)。
b,系统自动运行,掉件,确认信息,没有出现等待,则系统正常运行回HOME点后(不带件),再按一下KOP上“功能键“按钮。
c,若是系统自动运行,掉件,机器人停在中间,则确认信息,手动把机器人带回安全位置,然后,再重做上面“系统自动运行操作流程“第5步开始以后的步骤即可。
注意:如果掉件暂时不用报警信息提示,则可以把R1Systemsps.sub文件打开,文件里面:IF $IN[291] THENIF $IN[291] THENGRP_MSG(1)改为;GRP_MSG(1)即可。
关于Step7与KUKA库卡机器人外部自动启动配置总结

9
9
三、机器人外部自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
PLC >> KRC4 KRC4 >> PLC
265
27th August 2014
10
10
三、机器人外部自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
Automobile Production Solution
Step7与KUKA机器人外部自动启动 配置总结
汽车工业设备专家 Auto Industry Equipment Specialist
框架内容
技术经验总结
标准化总结
后续改造注意事项
27th August 2014
1
1
技术经验总结
硬件图纸设计/选型
编写机器人运行过程中暂停条件
提供机器人在HMI翻页后的偏移地址
填写PLC发给机器人的程序号(外部启动必须信号)
机器人反馈给PLC的实际运行程序号(外部启动必须信号)
PLC给机器人发外部自动程序启动命令(外部启动必须信号)
27th August 2014
23
23
六、PLC程序-机器人控制功能块配置
机器人返回原点控制(HMI操作按钮)
KRC4 >> PLC KRC4 >> PLC
27th August 2014
11
11
四、机器人外部自动启动时序
机器人与PLC IO交互信号配置好了之后,我们需要知道PLC与机器人的启动时序,机器人的启动 时序主要分为4步,具体如下:
关于Step7与KUKA库卡机器人外部自动启动配置总结

27th August 2014
22
背景
在GF2菲亚特项目软件设计中,关于KUKA机器人和西门子Step7编程软件的外部自动运行控制, 先前我们没有一个完善的总结,在每次项目调试中,我们依然需要花很多时间去搞清楚KUKA机器 人外部自动启动的原理,因此为了后续项目能够对KUKA外部自动启动的原理有个更清晰的理解, 特此以GF2项目软件调试经验做一个介绍和说明。
PGNO_PARITY- 程序号的奇偶位 PLC系统传递奇偶位的输入端。 PGNO_VALID- 程序号有效 PLC系统传送读取程序号指令的输入端。 PGNO_VALID- 程序号有效 EXT_START- 外部启动设定了该输入端后,输入 / 输出接口激活时将启动或继续一个程序 (一般为 CELL.SRC),该信号是个脉冲上升沿。 MOVE_ENABLE- 允许运行 该信号通过PLC的外部控制运行安全和报警联锁 对机器人驱动器使能控制。 CONF_MESS- 确认信息提示 通过给该信号使能,当故障原因排除后,PLC将确认机器人的故障信息。 DRIVES_ON- 驱动装置接通 通过该信号给机器人伺服驱动上伺服电,该信号触发至少持续20 毫秒的上升沿脉冲,直到驱动使能上了反馈回来去断开该输出控制。 DRIVES_OFF- 驱动装置关闭 该信号在安全回路、接口正常时为常”1”信号,PLC端触发了会关断机器人驱动装置,该信号触发至少持续20 毫秒的下降沿脉冲。
二、机器人外部运行控制接口配置
机器人通过外部PLC进行控制,需要配置外部控制运行接口和通讯连接,运行接口包括:IO运行 接口和安全回路接口。
IO运行接口配置 1、在机器人试教器通过安全组态界面组态运行控制方式
安全回路接口配置 2、在机器人安全组态界面进入通讯参数界面配置安全ID
库卡机器人外部变位机速度指令

库卡机器人外部变位机速度指令1. 引言库卡机器人是一种工业机器人,广泛应用于自动化生产线中。
机器人的外部变位机是指机器人在工作过程中,通过外部指令改变其位置和速度。
本文将详细介绍库卡机器人外部变位机速度指令的相关知识。
2. 库卡机器人外部变位机速度指令的概述库卡机器人外部变位机速度指令是通过编程的方式,向机器人发送指令,控制机器人在工作过程中的位置和速度。
通过合理设置速度指令,可以实现机器人的准确定位和高效运动。
3. 库卡机器人外部变位机速度指令的语法库卡机器人外部变位机速度指令的语法如下:P[速度指令]其中,速度指令是一个整数,表示机器人的速度。
速度指令的取值范围为0到100,表示机器人速度的百分比。
4. 库卡机器人外部变位机速度指令的使用库卡机器人外部变位机速度指令可以在机器人的编程环境中使用。
下面是一个使用速度指令的示例代码:P50 ; 设置机器人速度为50%在上述示例代码中,通过设置速度指令为50%,机器人的速度将被设定为其最大速度的50%。
5. 库卡机器人外部变位机速度指令的注意事项•库卡机器人外部变位机速度指令的取值范围为0到100,超出范围的值将被忽略。
•速度指令是一个相对值,表示机器人速度相对于其最大速度的百分比。
•设置速度指令时,应根据具体的应用需求进行调整,以实现最佳的运动效果。
6. 库卡机器人外部变位机速度指令的示例应用库卡机器人外部变位机速度指令可以应用于各种自动化生产线中。
下面是一个示例应用场景:假设有一个生产线上的库卡机器人负责将零件从一个位置搬运到另一个位置。
为了提高生产效率,需要将机器人的速度设置为其最大速度的80%。
可以通过以下代码实现:P80 ; 设置机器人速度为80%通过设置速度指令为80%,机器人将以其最大速度的80%进行工作,既能保证搬运效率,又能确保搬运的准确性。
7. 结论库卡机器人外部变位机速度指令是控制机器人在工作过程中位置和速度的重要指令。
合理设置速度指令能够提高机器人的工作效率和准确性。
KUKA简单操作说明书

K U K A简单操作说明书 Revised by Petrel at 2021K U K A简单操作说明书一、KUKA控制面板介绍1、示教背面在示教盒的背面有三个白色和一个绿色的按钮。
三个白色按钮是使能开关(伺服上电),用在T1和T2模式下。
不按或者按死此开关,伺服下电,机器人不能动作;按在中间档时,伺服上电,机器人可以运动。
绿色按钮是启动按钮。
SpaceMouse为空间鼠标又称6D鼠标。
2、示教盒正面急停按钮:这个按钮用于紧急情况时停止机器人。
一旦这个按钮被按下,机器人的伺服电下,机器人立即停止。
需要运动机器人时,首先要解除急停状态,旋转此按钮可以抬起它并解除急停状态,然后按功能键“确认(Ackn.)”,确认掉急停的报警信息才能运动机器人。
伺服上电:这个按钮给机器人伺服上电。
此按钮必须在没有急停报警、安全门关闭、机器人处于自动模式(本地自动、外部自动)的情况下才有用。
伺服下电:这个按钮给机器人伺服上电。
模式选择开关:T1模式:手动运行机器人或机器人程序。
在手动运行机器人或机器人程序时,最大速度都为250mm/s。
T2模式:手动运行机器人或机器人程序。
在手动运行机器人时,最大速度为250mm/s。
在手动运行机器人程序时,最大速度为程序中设定的速度。
本地自动:通过示教盒上的启动按钮可以使程序自动运行。
外部自动:必须通过外部给启动信号才能自动执行程序。
退出键:可以退出状态窗口、菜单等。
窗口转换键:可以在程序窗口、状态窗口、信息窗口之间进行焦点转换。
当某窗口背景呈蓝色时,表示此窗口被选中,可以对这个窗口进行操作,屏幕下方的功能菜单也相应改变。
暂停键:暂停正在运行的程序。
按“向前运行”或“向后运行”重新启动程序。
向前运行键:向前运行程序。
在T1和T2模式,抬起此键程序停止运行,机器人停止。
向后运行键:向后运行程序。
仅在T1和T2模式时有用。
回车键:确认输入或确认指令示教完成。
箭头键:移动光标。
菜单键:用菜单键打开相应菜单,通过箭头键选择子菜单,回车键使选中的菜单被应用。
KUKA配置顺序详细步骤

A:机器人上电后做系统原始GHOST (存储最终路径D:/ghost/original.gho)1在D盘新建文件夹,文件夹名称ghost2插入GHOST引导盘,重新启动机器人,按住DEL,进入BIOS,设置系统启动顺序为CD—ROM为优先启动,退出并保存设置,系统将重新启动,并进入GHOST引导界面3选择ghost中文向导(注意:请不要选择一键ghost)4选择local---partition----to image5双击后出现选择disk界面,直接点ok6出现选择分区界面,选择第一分区后点击ok7选择第二分区,在命名栏输入original 点击ok,系统将自动备份。
8 等待GHOST完成,选择重新启动。
B:安装Setup-CD系统做完原始GHOST后,重新启动机器人,按住Ctrl键,这样可以禁止KRC的启动,待系统启动完全。
在D盘新建文件夹(名称:安装软件),将安装盘放入光驱,将光盘中所有文件复制到安装软件这个文件夹中C设置机器人的名称、检查型号1进入expert模式2选择setup——robot data3进入后界面如下按照要求设置机器人名称(例如:UBR041 表示UB线4号位第一台机器人),检查型号与机器人本体一致后点击ok。
D:设置机器人存档以及恢复路径到U盘1.按住Ctrl+Esc键,进入WINDOWS界面2.进入路径为C:\KRC\UTIL\KRCCONFIGURATOR的文件夹中,选择文件名为KrcConfigurator的可执行文件,双击该图标,将出现如下界面3.按住Alt+T 键,出现如下界面,用方向键选择Archive Manager后按回车键,将出现如下界面4.利用Tab键可以在各个窗口间切换,切换到相应窗口修改(例如上面例子中机器人名称为UBR041,我们在设置机器人归档文件名称时也用一样的文件名),所以我们修改后的界面如下5.修改完成后,按住Tab 键切换到Apply ,按空格键或者回车键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2017/8/1库卡外部自动运行模式的过程和配置
配置并采用外部自动运行
⏹ 通过外部自动运行接口可用上级控制器(例如用一个PLC)来控制机器人进程
⏹ 上级控制系统通过外部自动运行接口向机器人控制系统发出机器人进程的相关信号(如运行许可、故障确认、程序启动等)。
机器人控制系统向上
级控制系统发送有关运行状态和故障状态的信息。
为了能够使用外部自动运行接口,必须进行下列配置:
1. 配置CELL.SRC 程序。
2. 配置外部自动运行接口的输入/ 输出端
输入端(从机器人控制器的角度)
⏹ PGNO_TYPE - 程序号类型
此变量确定了以何种格式来读取上级控制系统传送的程序编号。
如下表进行说明:
备注:采用这种传递格式时,未对PGNO_REQ、PGNO_PARITY 以及PGNO_VALID 的值进行分析,因此无意义。
⏹ PGNO_LENGTH - 程序号长度
此变量确定了上级控制系统传送的程序编号的位宽。
值域: 1 … 16。
若PGNO_TYPE 的值为2,则只允许位宽为4、8、12 和16。
⏹ PGNO_PARITY - 程序号的奇偶位
上级控制系统传递奇偶位的输入端。
如果PGNO_TYPE 值为3,则PGNO_PARITY 不被分析。
⏹ PGNO_VALID - 程序号有效
上级控制系统传送读取程序号指令的输入端。
⏹ $EXT_START - 外部启动
设定了该输入端后,输入/ 输出接口激活时将启动或继续一个程序(一般为CELL.SRC)。
备注:仅分析信号的脉冲上升沿。
在外部自动运行中无BCO 运行。
这表明,机器人在启动之后以
编程设定的速度(没有减速)到达第一个编程设定的位置,并
且不停在那里。
⏹ $MOVE_ENABLE - 允许运行
该输入端用于由上级控制器对机器人驱动器进行检查。
备注:当驱动装置由上级控制器停住后,将显示“ 开通全部运行” 的信息提示。
删除了该信息提示并且重新发出外部启动信号后机器人才能重新运动。
投入运行时变量$MOVE_ENABLE 常常设计为值$IN[1025]。
如果此
后忘记设计另一个输入端,则不能外部启动。
⏹ $CONF_MESS - 确认信息提示
通过给该输入端赋值,当故障原因排除后,上级控制器将自己确认故障信息。
备注:仅分析信号的脉冲上升沿。
⏹ $DRIVES_ON - 驱动装置接通
如果在此输入端上施加了持续至少20 毫秒的高脉冲,则上级控制系统会
接通机器人驱动装置。
⏹ $DRIVES_OFF - 驱动装置关闭
如果在此输入端上施加了持续至少20 毫秒的低脉冲,则上级控制系统会
关断机器人驱动装置。
输出端(从机器人控制器的角度)
⏹ $ALARM_STOP - 紧急停止
该输出端将在出现以下紧急停止情形时复位:
⏹ 按下了库卡控制面板(KCP)上的紧急停止按键。
(内部紧急关断)⏹ 外部紧急停止
注意:出现紧急停止时可从输出端$ALARM_STOP 和Int. NotAus 的状态看出是哪种紧急停止:
⏹ 两个输出端均为FALSE:触发了库卡控制面板(KCP)上的紧急
停止按键
⏹ $ALARM_STOP FALSE,Int. NotAus TRUE:外部紧急停止
⏹ $USER_SAF - 操作人员防护装置/ 防护门
该输出端在打开护栏询问开关(运行方式AUT)或放开确认开关(运行
方式T1 或T2)时复位。
⏹ $PERI_RDY - 驱动装置处于待机状态
通过设定此输出端机器人控制系统通知上级控制系统机器人驱动装置已接通。
⏹ $STOPMESS - 停止信息
该输出端由机器人控制系统来设定,以向上级控制器显示出现了一条要求
停住机器人的信息提示。
(例如:紧急停止按键、运行开通或操作人员防
护装置)
⏹ $I_O_ACTCONF - 外部自动运行激活
选择了外部自动运行这一运行方式并且输入端$I_O_ACT 为TRUE (一般始终设为$IN[1025])后,输出端为TRUE。
⏹ $PRO_ACT - 程序激活/ 正在运行
当一个机器人层面上的过程激活时,始终给该输出端赋值。
在处理一个程序或中断时,过程为激活状态。
程序结束时的程序处理只有在所有脉冲输出端和触发器均处理完毕之后才视为未激活。
⏹ PGNO_REQ - 程序号问询
在该输出端信号变化时,要求上级控制器传送一个程序号。
如果PGNO_TYPE 值为3,则PGNO_REQ 不被分析。
⏹ APPL_RUN - 应用程序在运行中
机器人控制系统通过设置此输出端来通知上级控制系统机器人正在处理有
关程序。
⏹ $IN_HOME - 机器人位于起始位置(HOME)
该输出端通知上级控制器机器人正位于其起始位置(HOME)。
⏹ $ON_PATH - 机器人位于轨迹上
只要机器人位于编程设定的轨迹上,此输出端即被赋值。
在进行了BCO 运行后输出端ON_PATH 即被赋值。
输出端保持激活,直到机器人离开了轨迹、程序复位或选择了语句。
但信号ON_PATH 无公差范围,机器人一离开轨迹,该信号便复位。
分步任务划分
1. 接通驱动装置
2. 确认信息提示
3. 启动Cell 程序
4. 传递程序号并处理应用程序
对每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给PLC。
⏹ 前提条件
⏹ $USER_SAF - 防护门已关闭
⏹ $ALARM_STOP - 无紧急停止
⏹ $I_O_ACTCONF - 外部自动运行激活
⏹ $MOVE_ENABLE - 允许运行
⏹ $DRIVER_OFF - 未激活驱动装置关闭
⏹ 接通驱动装置
$DRIVES_ON - 接通驱动装置至少20ms
⏹ 驱动装置处于待机状态
$PERI_RDY - 一有驱动装置的反馈,信号$DRIVES_ON 便撤回。
确认信息提示
⏹ 前提条件
$STOPMESS - 有停止信息
⏹ 确认信息提示
$CONF_MESS - 确认信息提示
⏹ 可确认的信息提示就此删除
$STOPMESS - 不再有停止信息,现在可撤回$CONF_MESS。
⏹ 前提条件
⏹ $PERI_RDY - 驱动装置处于待机状态
⏹ $IN_HOME - 机器人位于起始位置(HOME)
⏹ 无$STOPMESS - 无停止信息
⏹ 外部启动
$EXT_START - 接通外部启动(脉冲正沿)
⏹ CELL 程序在运行
⏹ $PRO_ACT - 报告CELL 程序在运行
⏹ $ON_PATH - 一有机器人位于轨迹上的反馈,信号$EXT_START 便撤回。
处理程序传递和应用程序
⏹ 前提条件
⏹ $PERI_RDY - 驱动装置处于待机状态
⏹ $PRO_ACT - CELL 程序在运行
⏹ $ON_PATH - 机器人在轨迹上
⏹ $IN_HOME - 机器人位于起始位置(HOME),重新启动时不再需要
⏹ PGNO_REQ - 有程序号问询
⏹ 程序号传递和确认
⏹ 程序号传递
(正确的数据类型(PGNO_TYPE),程序号长度(PGNO_LENGTH) 和程序号的第一比特位(PGNO_FBIT) 已设定)
⏹ PGNO_VALID - 将程序号切换为有效(确认,脉冲正沿)
⏹ 应用程序在运行中
⏹ APPL_RUN - 报告应用程序在运行中
⏹ 机器人离开起始位置(HOME),应用程序结束后机器人重又返回起始位置(HOME)
操作步骤 1. 在主菜单中选择配置> 输入/ 输出端> 外部自动运行。
2. 在数值栏中标定所需编辑的单元格,然后点击编辑。
3. 输入所需数值,并用OK 加以保存。
4. 对所有待编辑的数值重复第2 和第3 步。
5. 关闭窗口。
改动即被应用。
图为外部自动运行输入端配置。