运动目标检测与阴影消除的研究
基于背景重建的运动目标检测与阴影抑制

Ke od :b cgo n eos u tn moi betdtco ;hdw sp rsige g no a o y w r s ak u d rcnt co ; v g ojc eet n sa o u pes ;d ei r t n r r i n i n fm i
摘
要 : 出了一种静 止摄像机条件下的运动 目标检 测和去除阴影 的方 法。 提 该方法采用 以图像亮度和能量大小为判 断依据的分块
背景重建方法来快速更新 背景 , 并结合背景相减法 , 网格化连通域检 测 , 态学滤波等步骤 来检 测和提取运动 目标 , 形 同时运用边缘 检测获取 阴影边缘信 息, 并结合形 态学运算来去除 阴影 区域, 恢复 出完整物体 目标 。 实验 结果表 明, 该方法能够有效地检测 出运动
目标 和 抑 制 阴影 。 关键词 : 背景 重 建 ; 动 目标检 测 ; 运 阴影 抑 制 ; 边缘 信 息
b c g o n r c n tu t n a e o a e a e n e s y n i g e e g t u d t te a k o n a s ca e w t b c g o n a k r u d e o sr c i b s d n v r g it n i a d ma e n r o t y o p a e h b c g u d, s o it d i r h a k ru d
C m u rE gn e n n p l a os o p t n ier g ad A pi t n 计算机工程与应用 e i ci
2 1 ,6 1 ) 0 04 (6
17 9
基于 背 景 重 建 的运 动 目标检 测 与 阴影抑 制
刘 超 , 明一 , 何 付 勇
改进的HSV阴影去除算法研究

改进的HSV阴影去除算法研究作者:谭家政刘勇邱芹军来源:《物联网技术》2014年第01期摘要:针对视频序列图像中运动目标的阴影会造成运动目标的物理变形,影响运动目标的检测与跟踪等问题,提出了一种基于HSV色彩空间的无阈值阴影去除算法。
该方法通过分析阴影与背景的 HSV 彩色空间中的特性,并利用阴影与运动目标在 H、S、V 三个分量中的不同特点,提出了一种无阈值的阴影消除算法。
实验结果表明,该方法能够很好地去除阴影区域,同时又保持前景目标区域的完整性。
关键字:阴影去除;无阈值;HSV彩色空间中文分类号:TP391 文献标识码:A 文章编号:2095-1302(2014)01-0084-030 引言近年来,智能视频处理技术在商业、军事和工业领域得到了广泛的应用,如移动视频通信、工业过程控制、自主运载器导航、智能交通、目标检测与跟踪等。
其中,在智能视频处理系统中,运动目标检测与分析是后期处理与应用的基础,要把场景中的运动目标从背景中提取出来,常用的运动目标检测算法有帧间差分法、光流计算法、背景差减法[1]等方法。
检测运动目标大多采用背景差减法,但是常常由于光线在传播过程中被遮挡,在运动目标附近就会形成阴影,阴影常被误检测为前景。
然而,这些前景检测算法都不能将运动目标和运动阴影区分出来。
运动阴影严重影响目标分类、识别、跟踪等后续处理。
因此,如何准确地检测与分割阴影成了智能视频研究的一个重要课题。
在过去的几十年中,国内外很多研究者进行了深入的研究,提出了各种阴影检测与去除算法。
王宏在其硕士论文中对分割目标阴影做了深入的研究,并提出了机遇直方图和聚类技术阴影去除算法、基于色度畸变和局部交叉熵阴影去除算法和多梯度分析与线扫描阴影去除算法,通过实验证明了其提出算法的有效性[2];刘雪和常发亮等提出了机遇YUV颜色空间色度畸变和一阶梯度模型进行阴影去除的算法,并通过实验证明了其算法具有抗干扰和复杂度低等特点[3];苑颖、罗青山等提出了一种基于颜色不变形和建立阴影高斯模型的阴影检测和消除算法,其实验证明了其算法的有效性[4];但这些算法都具有一定的应用背景,离开这些应用背景就会出现很大的误差,甚至完全不起作用。
复杂背景下的运动目标分割与阴影消除
取方法 . 但是此方法仅仅用于提取静止 的前景区域 ,
实 用性 差 。时域差 分 运动检 测法 对于 动态环 境具 有 较 强 的 自适应 性 。 棒性 较好 , 鲁 能够 适应 多种 动态环
目前 已有 运 动 目标 分 割 方法 主要 有 : 景 差分 背 法 [ 、 域 差 分 运 动 检 测 法 [ 光 流 ( pi l 5 时 ] 9 和 O ta c Fo 法 [-] l w) 11 。其 中 , 景 差 分 法 利 用 当 前 图像 与 01 背 背景 图像 的差 分来 检 测 运 动 区域 , 这 种 方法 对 光 但
项 目来源 : 国家 自然科学 基金项 目(0 7 17 ; 68 2 1 ) 上海大学创新基金 ( HU X12 2 ) S C 1 1 1
收 稿 日期 :0 1 0 — 6 2 1 — 5 1 修 改 日期 :0 1 0 — 9 2 1- 6 0
52 7
电 子 器
件
第3 4卷
Abta tA m n o xsn mi rgo n bet sg e t insc sn o pe em na o f oig src : i igsme iigl t i f eru do j s em na o uha cm l esg e t i o m v e t i sn o c t i t tn n
关 键词 : 计算机视觉 ; 目标分割 ; 高斯混合模 型 ; 小波变换 ; 消除 ; 阴影
中图分 类号 : P 9 .2 T 314
文献标 识码 : A
文 章编 号 :0 5 9 9 ( 0 1 0 — 5 1 0 1 0 — 4 0 2 1 )5 0 7 — 5
随着视频多媒体的不断发展 。 视频运动 目标分 割已经成为计算机视觉研 究 的核心课题之一 _ ] 1 ,
《2024年基于OPENCV的运动目标检测与跟踪技术研究》范文
《基于OPENCV的运动目标检测与跟踪技术研究》篇一一、引言随着计算机视觉技术的飞速发展,运动目标检测与跟踪技术已经成为计算机视觉领域研究的热点。
该技术广泛应用于智能监控、交通流量管理、人机交互等众多领域。
OpenCV作为一个强大的计算机视觉库,为运动目标检测与跟踪提供了有效的工具。
本文旨在研究基于OpenCV的运动目标检测与跟踪技术,探讨其原理、方法及实际应用。
二、运动目标检测技术研究1. 背景及原理运动目标检测是计算机视觉中的一项基本任务,其目的是从视频序列中提取出运动的目标。
OpenCV提供了多种运动目标检测方法,如背景减除法、光流法、帧间差分法等。
其中,背景减除法是一种常用的方法,其原理是将当前帧与背景模型进行比较,从而检测出运动目标。
2. 关键技术与方法(1)背景建模:背景建模是运动目标检测的关键步骤。
OpenCV提供了多种背景建模方法,如单高斯模型、混合高斯模型等。
其中,混合高斯模型能够更好地适应背景的动态变化。
(2)阈值设定:设定合适的阈值是运动目标检测的重要环节。
阈值过低可能导致误检,阈值过高则可能导致漏检。
OpenCV通过统计像素值分布,自动设定阈值,从而提高检测的准确性。
3. 实验与分析本文通过实验对比了不同背景建模方法和阈值设定对运动目标检测效果的影响。
实验结果表明,混合高斯模型结合合适的阈值设定能够获得较好的检测效果。
此外,本文还对不同场景下的运动目标检测进行了实验,验证了该方法的稳定性和泛化能力。
三、运动目标跟踪技术研究1. 背景及原理运动目标跟踪是指在视频序列中,对检测到的运动目标进行持续跟踪。
OpenCV提供了多种跟踪方法,如光流法、Meanshift 算法、KCF算法等。
这些方法各有优缺点,适用于不同的场景和需求。
2. 关键技术与方法(1)特征提取:特征提取是运动目标跟踪的关键步骤。
OpenCV可以通过提取目标的颜色、形状、纹理等特征,实现稳定的目标跟踪。
此外,还可以采用深度学习等方法,提取更高级的特征,提高跟踪的准确性。
基于HSV空间阴影去除方法研究与应用

基于HSV空间阴影去除方法研究与应用高东旭;曹江涛;李平【摘要】在智能视频监控系统中,运动阴影如果被误判为运动目标,将会影响到场景中运动目标的准确提取、跟踪和预测.针对这一问题,设计了一种基于HSV颜色空间的阴影去除方法.方法首先将背景差法和三帧差分法相结合,用于提取运动目标,再将提取的含有阴影的运动目标区域映射到其HSV色彩空间,通过与背景和相邻帧的亮度、饱和度比较,实现对阴影区域的检测和去除,处理过程中无需提前确定特征判别参数.将所设计的方法在标准高速公路视频数据库中进行测试并应用于实时的视频监控系统,验证结果表明该方法能更加有效的消除阴影,从而准确的检测出运动目标,同时方法对光线变化具有一定的鲁棒性.【期刊名称】《电子设计工程》【年(卷),期】2014(022)013【总页数】4页(P65-68)【关键词】视频监控;运动目标检测;实时;HSV颜色空间;阴影消除【作者】高东旭;曹江涛;李平【作者单位】辽宁石油化工大学信息与控制工程学院,辽宁抚顺113001;辽宁石油化工大学信息与控制工程学院,辽宁抚顺113001;辽宁石油化工大学信息与控制工程学院,辽宁抚顺113001【正文语种】中文【中图分类】TP391.41阴影与运动目标具有相同的运动性质,但其纹理特征、边缘轮廓以及亮度等信息却有较大的区别。
目前的阴影检测方法主要从以下两方面入手:一类是基于阴影的模型的方法[1],其原理是通过建立一个阴影的统计模型来判断图像内像素点是否为阴影区域;另一类是基于特征的方法[2],其原理是通过采用图像的色调、颜色、亮度、灰度等信息来进行判断。
由于建立阴影模型通常比较复杂而困难,而且耗时大,因此在实时的智能视频监控系统中都是采用基于特征的方法来进行阴影消除。
在不同的颜色空间,阴影与运动目标具有不同的特性:张超等采用了一种基于RGB色彩空间的阴影检测方法[3],在RGB(红、绿、蓝)色彩空间中,任何一种颜色都可由RGB三原色按一定的比例构成,阴影也是有颜色的,但是当运动目标和阴影具有相同的颜色时,采用这种方法则不能很好的分离出运动目标的阴影;王小鹏等采用的是基于图像的灰度变化进行阴影检测的方法[4],但在运动目标与阴影的灰度值相似时很难确定准确的阈值来区分运动目标和阴影;Rahmat等采用了基于YUV色彩空间的阴影检测的方法[5],YUV空间的亮度分量(Y)和两个色度分量(U、V)是独立的,YUV空间的阴影消除算法通过计算3个差值函数:亮度差值函数、色度差值函数、梯度差值函数来判断是否为阴影,虽然检测性能较好,但算法复杂,而且有较多的阈值需要确定,因而不适合用于实时的智能监控系统;Norbert等提到了一种基于HSV(色度、饱和度、亮度)色彩空间的阴影去除的方法[6],因为HSV色彩空间采用的是色彩的色度、饱和度及亮度等信息,直接与人的视觉感知方式紧密相连,因而更能精确的反应出运动目标与阴影的色彩和灰度信息。
基于视频的运动车辆阴影检测与去除
2 De at n fI fr t n E gn r g u h u Isiueo n u tilTeh oo y,S z o 1 14 hn ) . p rme to no mai n ie i ,S z o nttt fI d sra c n lg o n u h u 2 5 0 ,C ia
一种自适应的运动目标阴影消除新算法
Ke r s dpied nmi txuea a s ; vn bet;hd w ei nt n ywo d :a at ;y a c e t n l i mo igo jcssa o l ai v r ys mi o
摘
要 : 确地 消除 活动 阴影对运动 目标 的影响是智能视频监控 的核 心任务之 一 , 精 对此提 出了一种基 于局 部纹理分析 的 自适应
阴影 消除 新 算 法 。进 行 了基 于 高斯 混合 模 型 的 背 景 重 建 , 并根 据 阴 影 的 光 学 特 性 进 行 了 阴影 区域 的 预 检 测 , 到 疑 似 阴影 区域 ; 得 提 出了一 种新 的 自适 应 动 态 纹理 分 析 方 法并 在 此 基础 上 实现 了活动 阴影 的检 测 与 消除 。 实验 结果 验 证 了算 法的 有 效性 和 实用 性 。
关键词 : 自适应 ; 态纹理分析 ; 动 运动 目标 ; 阴影 消除
DOI1.7 8 ,s . 0 —3 1 0 03 .5 文章 编 号 :0 28 3 ( 0 0 3 —180 文献 标识 码 : 中 图 分 类 号 : P 9 .03 7 /i n1 28 3 . 1.6 2 js 0 2 0 10 —3 12 1 )60 8 —4 A T31
b h o e to . p r e trs l r v h ai i n rcia it f te ag r h . y te n v lmeh dEx ei n eut po e te v l t a d p a t bl o h lo i m m s dy c i y t
自然场景下运动目标检测与阴影剔除方法

( 1 .S c h o o l o f El e c t r o n i c I n f o r ma t i o n,W u h a n Un i v e r s i t y ,W u h a n 4 3 0 0 7 2,Ch i n a;2 .S c h o o l o f Ph y s i c s a n d El e c t r o n i c I n f o r ma t i o n En g i n e e r i n g,H u b e i En g i n e e r i n g Un i v e r s i t y,Xi a o g a n,Huh e i 4 3 2 0 0 0,Ch i n a )
Ab s t r a c t : A me t h o d f o r d e t e c t i n g mo v i n g o b j e c t s b a s e d o n d u a l — t h r e s h o l d a n d mu l t i — r e s o l u t i o n
自然 场 景 下 运 动 目标 检 测 与 阴 影 剔 除 方 法
屠 礼芬 ,仲 思东 ,彭祺 。
( 1 . 武 汉 大 学 电子 信 息 学 院 , 4 3 0 0 7 2 ,武汉 ; 2 . 湖 北 工 程 学 院 物 理 与 电 子 信 息工 程学 院 ,4 3 2 0 0 0 , 湖北孝感)
Ga us s i a n mi xt u r e mo d e l s a nd f or e l i mi na t i ng s ha d ow ba s e d o n mu l t i — a t t r i but e( na me d M RPS) i s p r o po s e d t o a dd r e s s t he pr o bl e m o f l o w f o r e gr o un d ma s k d e t e c t i on a c c u r a c y c a u s e d by c a s t
运动目标检测中阴影去除算法的

利用颜色直方图或颜色矩阵等颜色特征,通过计算颜色差异和梯度来检测阴影 区域。
基于纹理特征的阴影去除
基于纹理特征的阴影检测算法
利用图像的纹理特征,通过比较纹理信息来检测阴影区域。
基于多尺度纹理分析的阴影去除算法
对图像进行多尺度分解,利用不同尺度的纹理信息来去除阴影。
基于深度学习模型的阴影去除
提升目标识别率
通过去除阴影,可以更好地突出运动目标的特征,提高目标 的可识别性,从而帮助监控系统更好地分析目标行为。
在无人驾驶中的应用
避免遮挡
在无人驾驶中,运动目标检测是实现车 辆避障和路径规划的重要手段。阴影可 能会遮挡住部分目标,影响检测效果。 去除阴影可以提高目标的可见性,从而 帮助无人驾驶系统更好地感知周围环境 。
缺点:计算量大,实时性较差。
背景减除法
通过将当前帧与背景 帧进行减除,提取出 运动目标。
缺点:对动态背景适 应性较差,易受背景 干扰影响。
优点:能够适应静态 背景,对光照变化和 场景变化具有较强的 鲁棒性。
03
阴影去除算法研究
基于颜色特征的阴影去除
基于颜色空间的阴影去除算法
通过将图像从RGB颜色空间转换为HSV或YCrCb颜色空间,可以更好地分离阴 影区域,并对其进行处理。
增强适应性:针对不同场景和条件,研究更具适应性的阴影去除算法,提高其对复杂环境和 变化光照条件的鲁棒性。
研究不足与展望
数据集扩充
通过对更大规模、更多样化的数据集进行训练和测试, 提高阴影去除算法的性能和泛化能力。
多模态融合
将不同模态的信息进行融合,如图像、视频和传感器数 据等,以提供更全面和准确的运动目标检测和阴影去除 结果。
运动目标检测中的阴影去除方法

目前有很多种颜色空间可以将图像的色度分量 和亮度分量区分开来 ,如 HSV 颜色空间 ,它较 RGB 颜色空间更接近于人眼对颜色的感觉 ,可以消去彩 色信息中强度分量的影响 ,通过比较当前帧图像和 背景图像的亮度和色度变化 ,检测出阴影区域 。但 是这种转换较为复杂 ,对于大型图像非常耗时 ,并且 在亮度值和饱和度较低的情况下 ,采用 HSV 颜色空 间计算出来的 H分量是不可靠的 。
L IU Xue, CHANG Fa - liang,WANG Hua - jie
( S chool of Con trol S cience and Eng ineering, S handong U n iversity, J inan 250061, Ch ina)
Abstract: Shadow is always regarded as foreground in detecting moving object by using background subtraction algorithm , which has bad effect on segm enting and extracting object. In order to extract object exactly, a shadow supp ression method based on chrom inance distortion in YUV color space and first order gradient inform ation is p roposed in this paper. Experiments result show that the algorithm is robust in noisy environm ent, low comp lexity, and easy to be imp lem ented in real time.
运动目标检测

但变化中可能有噪声 读数会有误差
温度计观测(摄氏-〉华氏)
–
两种噪声相互无关 根据连续的观测值来推算实际温度变化
KF是根据上一状态的估计值和当前状态的观测值推出 当前状态的估计值的滤波方法
–
S(t) = f ( S(t-1) , O(t) )
它是用状态方程和递推方法进行估计的,因而卡尔曼 滤波对信号的平稳性和时不变性不做要求
帧间背景校正
特征点提取 采用经典的Harris算子提取参考帧的特征点, 计算图像亮度I(x,y)在点(x,y)处的梯度: X I (1, 0,1)
T Y I (1, 0,1)
构造自相关矩阵
A X 2 w, B Y 2 w, C ( XY ) w
SAD(i, j ) I1 (m, n) I 2 (m i p, n j p) (i, j p,..... p)
m 1 n 1
M
N
step4:找出最小的SAD值,则其对应位置为 匹配特征窗,其中心点即为匹配特征点
ˆ, y ˆ y 运动到当前帧的位置 x ˆ m0 m1 x m2 x 则对应的坐标关系为: y ˆ m3m4 y m5
由于场景的动态变化,如天气、光照、阴影及 杂乱背景干扰等的影响,使得运动目标的检测 与分割变得相当困难。运动检测分为静态背景 和动态背景两类。
常用的方法有帧差法、光流法、背景减除法等。
运动目标检测的预处理
帧间背景校正——首先对相邻帧进行Байду номын сангаас局运动 估计,补偿当前帧以实现背景校正 背景建模——混合高斯模型建模
运动目标检测与跟踪算法的研究进展
运动目标检测与跟踪算法的研究进展0 引言人类感知的环境信息大多是通过视觉获得的,而在接受到的所有视觉信息中,人们又往往对动态信息更感兴趣。
随着多媒体技术的发展,人们正在接触越来越多的视频信息。
一方面,要获得较高压缩比来存储这些信息,另一方面,需要对感兴趣的区域或对象进行操作[1]。
因此对视频图像中运动目标的提取、分类识别和跟踪,已成为对运动目标的行为进行理解和描述视频图像中动态信息的主要内容。
运动目标的检测与跟踪在技术上融合了计算机视觉、视频图像处理、模式识别和自动控制等相关领域的知识[2]。
运动目标的检测与跟踪是视频技术的一个重要研究方向,其应用十分广泛。
在交通流量的监测、安全监控、军事制导、视觉导航,以及视频编码中都有涉及。
目前,运动目标的检测与跟踪已经取得了很多成果,并且不断有新技术、新算法涌现。
但是,在实际环境中,由于自然环境的复杂(光照、气候的变化等),目标的高机动性,干扰了目标检测与跟踪,造成检测不准确且跟踪效率不高。
因此,研究改进运动目标检测与跟踪算法有很现实的意义和应用价值。
1 运动目标检测常用算法运动目标检测就是从视频图像中将变化的区域从背景中提取出来,此类算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测。
静态背景下只有被监视目标在摄像机的视场内运动;而动态背景下摄像机也发生了运动,这个过程就产生了目标与背景之间复杂的相对运动,造成动态背景下的运动检测和跟踪难度很大。
目前对于动态背景下运动检测和跟踪的研究较少,因此本文暂不涉及运动背景下的运动目标检测与跟踪。
在静态背景下,运动目标检测主要算法有三种:帧间差分法、背景差分法和光流法。
下面分别对这三种算法进行分析。
1.1 帧间差分法帧间差分法[3]的基本原理就是相邻帧的图像对应像素点的灰度值相减,通过差分图像进行二值化处理以确定运动目标。
帧间差分法的主要优点是:算法实现简单,程序设计复杂度低;不存在背景的获取、更新和存储的问题;对场景中光线的变化不太敏感,实时性好。
运动场景中的目标检测与跟踪算法的研究

运动场景中的目标检测与跟踪算法的研究随着计算机视觉技术的快速发展,目标检测与跟踪算法在运动场景中的应用越来越广泛。
本文将介绍运动场景中目标检测与跟踪算法的研究现状和发展趋势。
一、目标检测算法目标检测算法用于从图像或视频中定位和分类物体。
在运动场景中,目标检测算法需要处理物体的运动模糊、几何变换和遮挡等问题。
1.传统算法传统的目标检测算法主要包括基于模板匹配、基于特征提取的方法和基于机器学习的方法。
模板匹配方法通过比较图像中的模板和待检测物体的相似性来完成目标检测。
由于其对光照、姿态和遮挡等因素极其敏感,因此在运动场景中的应用受到限制。
特征提取方法通过提取物体在图像中的一些特定特征,如颜色、纹理、边缘、角点等,来实现物体的检测。
最为广泛应用的是基于Haar特征和HOG(方向梯度直方图)特征的方法。
这些方法可以在不同的光照、姿态和遮挡等情况下有相对稳定的检测效果,但是其缺点是检测速度较慢且对于复杂背景和噪声等因素会有较大影响。
机器学习的目标检测方法主要包括基于支持向量机(SVM)和AdaBoost算法的方法。
这些方法可以更好地解决物体遮挡和局部遮挡的问题,但是需要较大的训练数据和特征工程的支持。
2.深度学习算法近年来,深度学习算法在目标检测领域取得了显著的进展,尤其是基于卷积神经网络(CNN)的方法。
本文介绍以下几种深度学习算法在运动场景中的应用。
基于快速基础模型(Faster R-CNN)的目标检测算法可以同时检测多个物体并具有较高的检测精度和速度。
在运动场景中,物体的运动速度较快,因此该算法需要加入运动模型和目标跟踪等额外信息来提高检测精度。
基于单阶段检测模型(YOLO)的目标检测算法可以同时进行目标检测和跟踪,并具有较快的处理速度。
这种算法在处理大量目标时效果尤其明显。
二、目标跟踪算法目标跟踪算法是在一系列连续帧中跟踪物体的位置和运动状态的过程。
由于运动场景中物体的姿态、运动和遮挡等因素的不确定性,目标跟踪算法的研究领域也显得尤为重要。
监控系统下的运动目标检测方法[文献综述]
![监控系统下的运动目标检测方法[文献综述]](https://img.taocdn.com/s3/m/80bf9688ec3a87c24028c4c5.png)
利用上述方法二值化差图像 后,其中包含真正的运动信息。
2.3.4目标检测[8]
2.3.4.1运动目标的提取
设n时刻背景参考图像为 ,当前帧图像为 ,则背景差分图像为:
(2.3.7)
对于运动目标检测的判断依据为:若 ,则 点属于运动目标象素,反之属于背景点象素。这里的T是门限阈值。首先需要评估活动值是由运动对象造成的,还是由摄像头的噪声造成的。假设摄像头的噪声是叠加噪声,遵从高斯分布。描述该分布的参数有均值 和标准差 。噪声假设是和空间和时间无关的。基于这些假设,第n帧颜色通道i的强度观测值 可以表达为:
,(2.1.2)
。(2.1.3)
得到运动目标的运动矢量场后,可以对矢量场图像进行分割以获得运动区域。首先由矢量场图像的均值确定阈值。然后对图像进行快速的阈值分割,得到初始的分割图像并对其进行中值滤波和闭运算。最后,由光流检测和形态滤波处理得到的运动目标区域,通过连通分量分析最终确定运动目标的位置。
2.1.3.该方法的特点:
(2.2.9)
2.2.3.3生成背景掩膜:
将当前帧与式(2.2.9)得到的背景帧对应像素相减可以得到背景帧差 ,见式(2.2.10)。
(2.2.10)
背景帧差 与阈值 比较,即可得到背景掩膜 中各点的值 。
(2.2.11)
2.2.3.4运动对象检测:
如果当前时刻像素点 满足条件时 ,也即该点属于背景的可能性是比较大的,那么背景掩膜 能更好地反映当前点的状态;否则,当前帧掩膜 能更好地反映当前点的状态。由当前帧掩膜 和背景掩膜 生成运动对象掩膜 ,并利用其进行运动对象检测。
(2.3.15)
2.3.5.背景更新[8]
由公式(2.3.1)可知每一个象素的背景差分值 ,于是可以得到变化检测掩模如下:
无人机SAR运动目标检测与成像方法研究
无人机SAR运动目标检测与成像方法研究一、引言1. 研究背景与意义随着无人机技术的迅猛发展,无人机平台已经成为遥感领域中的重要工具。
合成孔径雷达(SAR)作为一种主动式微波遥感技术,具有全天时、全天候的成像能力,因此在无人机平台上搭载SAR系统具有巨大的应用潜力。
无人机SAR系统能够实现对地表的高分辨率成像,并且在灾害监测、军事侦察、地形测绘等领域发挥着重要作用。
然而,无人机SAR系统在进行成像时,常常会受到运动目标的影响,导致成像质量下降。
因此,研究无人机SAR运动目标检测与成像方法具有重要的实际意义。
通过对运动目标的准确检测与成像,可以提高无人机SAR系统的成像质量和应用效果,为相关领域的决策提供更为准确、可靠的信息支持。
2. 研究现状目前,国内外在无人机SAR运动目标检测与成像方面已经取得了一定的研究进展。
传统的方法主要基于信号处理、图像处理和计算机视觉等技术,通过对回波信号或图像序列进行处理来检测运动目标。
然而,这些方法在处理复杂场景和微弱目标时往往存在性能瓶颈。
近年来,深度学习等人工智能技术在图像处理领域取得了显著的成功,也为无人机SAR运动目标检测与成像提供了新的思路和方法。
通过构建深度神经网络模型,可以实现对运动目标的自动检测和成像,提高检测的准确性和鲁棒性。
然而,深度学习模型在训练过程中需要大量的标注数据,而在实际应用中往往难以获取足够数量的标注样本,这是当前研究面临的一个挑战。
3. 研究目标与内容本研究的目标是针对无人机SAR系统中的运动目标检测与成像问题,提出一种有效的方法来提高检测的准确性和成像的质量。
具体研究内容包括:分析运动目标的特性,研究传统的运动目标检测方法及其性能瓶颈;探索深度学习等人工智能技术在运动目标检测与成像中的应用潜力;设计并实现一种基于深度学习的无人机SAR运动目标检测与成像方法;通过实验验证所提方法的有效性和优越性。
二、无人机SAR系统基础1. 无人机平台无人机平台是无人机SAR系统的重要组成部分,其类型、载荷能力和技术参数直接影响到系统的性能和成像质量。
视频监控系统中运动目标的检测和阴影抑制
文章 编 号 :0 2 8 3 ( 0 7 2 — 2 2 0 文献 标 识 码 : 中 图分 类 号 : P 9 10 — 3 1 2 0 ) 1 0 3 — 3 A T 31
l 引 言
在 视频 监 控 系 统 中 . 动 目标 的 实时 检 测 一 直 是 一 个 重 要 运
2 目标 检测 21 运 动 目标的 提取 .
背 景 相 减 法 的基 本 思 想 是 通 过 输 入 图像 与背 景 参 考 图 像 进 行 比较 的方 法 来 检 测 运 动 目标 。 设 n时 刻 背 景 参 考 图像 为 ( Y n , 前 帧 图像 为 ( ,,) 当 , Yn , 背 景 差 分 图像 为 ,)则
d tcig mo ig tres a d s p rsig sa o ee t vn ag t n u pe sn h d w. n
Ke o d :b cg u d u d t; vn b c d t t n sa o u pes n H y w rs akr n paemoig oj t e c o ;hd w sp rs o ; MMD cl pc ;de dt t n o e ei i o rsae eg e ci o e o 摘 要 : 出 了一 种 室 内静 止摄 像 机 条件 下的运 动 目标 检 测 和 阴 影抑 制 方 法。该 方 法采 用一 种 自适 应 的 背 景估 计方 法 来 实 时 更新 提
ca sf a in f r b b l y, so i ts ls i c t o p a i t a s c ae wi HMMD o o s a e n l mi o i c a a t r t f r h d w u p e s n, n t e i o o i t h c lr p c a d u n s y h r c e si o s a o s p r s i a d h n t i c o
运动目标检测研究方法述论
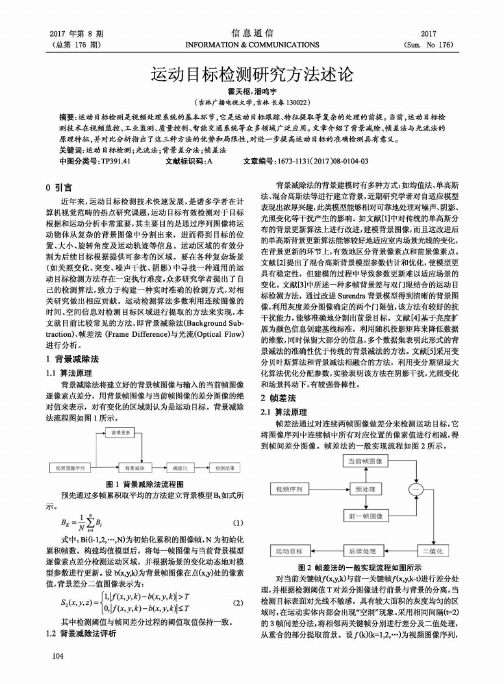
2017年第8期 信息通信2017(总第 176 期)INFORMATION & COMMUNICATIONS(Sum. N o 176)运动目标检测研究方法述论霍天枢,潘鸣宇(吉林广播电视大学,吉林长春130022)摘要:运动目标检测是视频处理系统的基本环节,它是运动目标跟踪、特征提取等复杂的处理的前提。
当前,运动目标检测技术在视频监控、工业监测、质量控制、智能交通系统等众多领域广泛应用。
文章介绍了背景减除、帧差法与光流法的 原理特征,并对比分析指出了这三种方法的优势和局限性,对进一步提高运动目标的准确检测具有意义。
关键词:运动目标检测;光流法;背景差分法;帧差法中图分类号:TP 391.41 文献标识码:A文章编号:1673-1131(2017)08-0104-03〇引言近年来,运动目标检测技术快速发展,是诸多学者在计 算机视觉范畴的热点研究课题,运动目标有效检测对于目标 根据和运动分析非常重要,其主要目的是通过序列图像将运 动物体从复杂的背景图像中分割出来,进而得到目标的位 置、大小、旋转角度及运动轨迹等信息。
运动区域的有效分 割为后续目标根据提供可参考的区域。
要在各种复杂场景(如关照变化、突变、噪声干扰、阴影)中寻找一种通用的运 动目标检测方法存在一定执行难度,众多研究学者提出了自 己的检测算法,致力于构建一种实时准确的检测方式,对相 关研究做出相应贡献。
运动检测算法多数利用连续图像的 时间、空间信息对检测目标区域进行提取的方法来实现,本 文就目前比较常见的方法,即背景减除法(Background Sub traction )、 侦差法 (Frame Difference ) 与光流 (Optical Flow )进行分析。
1背景减除法 1.1算法原理背景减除法将建立好的背景帧图像与输入的当前帧图像 逐像素点差分,用背景帧图像与当前帧图像的差分图像的绝 对值来表示,对有变化的区域则认为是运动目标。
基于PPG信号的运动伪影去除算法研究进展

基于PPG信号的运动伪影去除算法研究进展【摘要】本文主要探讨了基于PPG信号的运动伪影去除算法研究进展。
引言部分介绍了研究背景和研究意义,指出了伪影对信号的影响。
在分别从基于滤波、机器学习和深度学习三个方面研究了去除算法,并比较了它们的优缺点。
在结论部分提出了未来研究方向,并总结了现有研究成果,并展望了未来的发展。
通过本文的研究,可以为进一步解决PPG信号中的运动伪影问题提供参考和指导。
【关键词】关键词:PPG信号、运动伪影、去除算法、滤波、机器学习、深度学习、优缺点对比、未来研究方向、总结与展望。
1. 引言1.1 研究背景如何有效地去除运动伪影成为了当前研究的热点之一。
传统的滤波方法在去除运动伪影方面效果有限,而基于机器学习和深度学习的方法则因其强大的数据处理能力而备受关注。
通过研究基于PPG信号的运动伪影去除算法,有助于提高运动监测设备的准确性和可靠性,进而促进健康管理和运动科学的发展。
1.2 研究意义PPG信号在心率监测和生理参数检测等领域具有广泛的应用,但受到运动伪影的干扰,信号的稳定性和准确性受到影响。
研究基于PPG信号的运动伪影去除算法具有重要的理论和实际价值。
准确的心率监测对于健康管理和病理诊断具有重要意义。
通过去除运动伪影,可以提高心率监测的准确性和稳定性,为健康管理和疾病筛查提供更可靠的数据支持。
运动伪影的干扰也限制了PPG信号在运动监测和运动耐受性评估等方面的应用。
通过研究运动伪影去除算法,可以拓展PPG信号在运动健康监测领域的应用范围,为运动医学和运动生理学领域提供更多的可靠数据。
2. 正文2.1 运动伪影对PPG信号的影响在运动伪影对PPG信号的影响方面,主要表现在信号质量上的影响。
由于人体在运动时,皮肤和血管的位置会发生变化,导致PPG信号中出现干扰性的运动伪影。
这些运动伪影会使得信号波形变得不稳定,频率呈现异常变化,从而影响了信号的准确性和稳定性。
运动伪影也会对心率和血压等生理参数的测量结果产生影响。