第7章new传递函数矩阵矩阵分式描述结构特性更新中
绪论

出生日期: 1831年06月13日 逝世日期: 1879年11月5日 职业: 物理学家
Harbin Engineering University
3 公因子和最大公因子
公因子的定义
• 相同列数的两个多项式矩阵间可以定义右公因子(是多项式 矩阵).假定N(s)和D(s)列数相同,若 N ( s) N ( s) R( s)
D(s) D (s) R(s) 则R(s)称为N(s)和D(s)的右公因子.
认识他们吗??
Edward John Routh :1831年1月20日出 生在加拿大的魁北克。
Routh 11岁那年回到英国,在de Morgan指导下学 习数学。在剑桥学习的毕业考试中,他获得第一名。并 得到了“Senior Wrangler”的荣誉称号。 毕业后Routh开始从事私人数学教师的工作。从 1855年到1888年Routh教了600多名学生,其中有27位获 得“SEnior Wrangler”称号。建立了无可匹敌的业绩。
Harbin Engineering University
哈罗德·史蒂芬·布莱克( Harold Stephen Black)
Harold Stephen Black (April 14, 1898 – December 11, 1983) was an American electrical engineer, who revolutionized the field of applied electronics by inventing the negative feedback amplifier in 1927. To some, his invention is considered the most important breakthrough of the twentieth century in the field of electronics, since it has a wide area of application. However, a negative feedback amplifier can be unstable such that it may oscillate. Once the stability problem is solved, the negative feedback amplifier is extremely useful in the field of electronics. Black published a famous paper, Stabilized feedback amplifiers, in 1934.
第八章-传递函数矩阵的矩阵分式描述
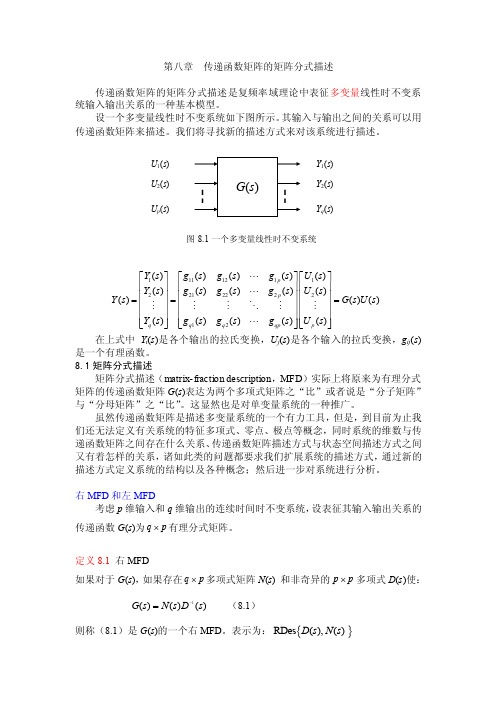
第八章 传递函数矩阵的矩阵分式描述传递函数矩阵的矩阵分式描述是复频率域理论中表征多变量线性时不变系统输入输出关系的一种基本模型。
设一个多变量线性时不变系统如下图所示。
其输入与输出之间的关系可以用传递函数矩阵来描述。
我们将寻找新的描述方式来对该系统进行描述。
1111211221222212()()()()()()()()()()()()()()()()()()p p q q q qp p Y s g s g s g s U s Y s g s g s g s U s Y s G s U s Y s g s g s g s U s ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦在上式中Y i (s )是各个输出的拉氏变换,U j (s )是各个输入的拉氏变换,g ij (s )是一个有理函数。
8.1矩阵分式描述矩阵分式描述(matrix-fraction description ,MFD )实际上将原来为有理分式矩阵的传递函数矩阵G (s )表达为两个多项式矩阵之“比”或者说是“分子矩阵”与“分母矩阵”之“比”。
这显然也是对单变量系统的一种推广。
虽然传递函数矩阵是描述多变量系统的一个有力工具,但是,到目前为止我们还无法定义有关系统的特征多项式、零点、极点等概念,同时系统的维数与传递函数矩阵之间存在什么关系、传递函数矩阵描述方式与状态空间描述方式之间又有着怎样的关系,诸如此类的问题都要求我们扩展系统的描述方式,通过新的描述方式定义系统的结构以及各种概念;然后进一步对系统进行分析。
右MFD 和左MFD考虑p 维输入和q 维输出的连续时间时不变系统,设表征其输入输出关系的传递函数G (s )为p q ⨯有理分式矩阵。
定义8.1 右MFD如果对于G (s ),如果存在p q ⨯多项式矩阵N (s ) 和非奇异的p p ⨯多项式D (s )使:)()()(1s D s N s G -= (8.1)则称(8.1)是G (s )的一个右MFD 。
第7章new传递函数矩阵的矩阵分式描述和结构特性更新中
2
s 3
s 1 s3 s3 s4
s
s
s
2
s 1
解 首先构造G(s) 的右MFD。为此,定出G(s)各列的最小公分母如下: dc1(s) = (s+2)(s+3)2 , dc2(s) = (s+3)(s+4) ,dc3(s) = (s+1)(s+2)
由此可以导出G(s)的右MFD为
G(s) Nr (s)Dr1(s)
Nr(s) = Qr(s)Dr(s) + R(s)
(7-31)
且 R(s)Dr-1(s) 是严真性有理矩阵,或者说在Dr(s)为列既约条件下
δcj R(s) < δcj Dr(s),
j=1,2,…,m
(7-32)
定理7-4的对偶定理 设Nl(s)和Dl(s)是两个r×m和r×r阶多项式矩阵,且
Dl(s)非奇异,则存在唯一的 r×m 阶多项式矩阵Ql(s)和L(s)使得
1 右MFD和左MFD 考虑p维输入和q维输出的连续线性时不变系统,其输入输出关系的传递
函数矩阵G(s)为q×p有理分式矩阵,其表示形式为
n11 ( s) d11 ( s)
n1p (s)
d1
p
(s)
G(s)
nq1
(
s)
nqp
(s)
dq1(s)
dqp (s)
(7 1)
严格真有理矩阵:有理矩阵 G(s) 满足 G(∞) = 0。 真有理矩阵:有理矩阵 G(s) 满足 G(∞) = G0 (非零常数)。
(6-2)
右分母矩阵: p×p 阶方阵Dr(s);右分子矩阵: q×p 阶矩阵Nr(s); 左分母矩阵: q×q 阶方阵Dl(s); 左分子矩阵: q×p 阶矩阵Nl(s)。
传递函数矩阵分析

令 : R(s) 是 gcrd , 则 D(s) D(s)R(s), N (s) N (s)R(s) , 代 入
X(s)D(s)+Y(s)N(s)=I:
X (s)D(s) Y (s)N (s) R(s) I ,所以 R1(s) = X (s)D(s) Y (s)N (s) 存在
第5页,本讲稿共52页
其它性质:
(1)Q(s)为单模阵 Q(s)非奇异;
(2)同维单模阵相乘必为单模阵;
(3)Q(s)为单模阵 Q1(s) 位单模阵;
第6页,本讲稿共52页
三、初等变换
对一个多项式 N(s)
1. 矩阵中任意两行互换,i,j 两行互换,相当于对 N(s)
左乘下述阵:
1
1
0 1
( 2 ) N(s),D(s) 任 何 其 他 公 因 式 R1(s) 满 足 :
R(s)=W(s)R1(s);
gcld(左):是 gcrd 的对偶。
3. gcrd 的构造
方法:将
D(s) N (s)
经初等变换
R(s)
0
,即
U(s)
D(s) N (s)
R(s)
0
,
U(s)为单模阵。
第18页,本讲稿共52页
传递函数矩阵分析传递函数矩阵matlab传递函数矩阵传递函数分析multisim传递函数分析传递函数开环传递函数matlab传递函数闭环传递函数传递函数的定义
传递函数矩阵分析
第1页,本讲稿共52页
§1 多项式阵 一、多项式
D(s) d n s n d n1s n1 d1s d0 多项式加减乘仍为多项式,多项式除可能不是多项式, 多项式的集合不能构成一个域。 多项式的阶次 degD(s)=n,即为最高项的次数, d n =1 称为首一多项式。
传递函数以及系统方块图

0
式中,称 X(s) 为象函数,x(t) 为原函数。 s 为复变数,其量纲为时间的倒数,即频率。 象函数 X(s) 的量纲为 x(t) 的量纲与时间量纲 的乘积。
6
传递函数
传递函数: 在拉氏变换的基础上,以系统本身的参数描述线 性定常系统输入量与输出量的关系式。 线性定常系统: 可以用常系数线性微分方程描述的系统。 在零起始条件下,线性定常系统输出量的象函数 Xo(s)与输入量的象函数Xi(s)之比,称为系统的传递 函数G(s),即
G6 ( s )
G7 ( s )
零点:传递函数分子为零时的 s 值 极点:传递函数分母为零时的 s 值
10
s2 1 如对G ( s) 2 , 其零点为s j或s=-j,极点为s=0或s=2 s 2s
典型环节的传递函数 xo (t ) kxi (t ) 一. 比例环节
传递函数
G( s ) k
二. 一阶惯性环节 T xo (t ) xo (t ) xi (t ) 传递函数
变换法则: (1)各前向通路传递函数的乘积不变; (2)各回路传递函数的乘积不变。
22
8. 方块图简化 例:化简方块图并求传递函数
G5 ( s ) X i (s )
+ _ +
G2 ( s )
+ _
G1 ( s )
G3 ( s )
A G ( s) 4
G6 ( s )
X o (s )
G7 ( s )
23
X o (s )
27
X i (s )
G1 ( s )G2 ( s )G3 ( s )G4 ( s ) 1 G2 ( s )G3 ( s )G5 ( s ) G3 ( s )G4 ( s )G6 ( s ) G1 ( s )G2 ( s )G3 ( s )G4 ( s )G7 ( s )
线性系统理论(绪论)
008
绪论
5、线性系统理论的研究对象
p研究对象为线性系统:
实际系统理想化模型, 可用线性微分方程或差分方程来描述。 p研究动态系统,动力学系统:
用一组微分方程或差分方程来描述,
对系统的运动和各种性质给出严格和定量的数学描述。 数学方程具有线性属性时,则为线性系统,满足叠加性。
009
绪论
例:某系统的数学描述为L,任意两个输入变量 u1和
u2以及任意两个有限常数 c1和 c2,必有: L ( c1u1 + c 2 u 2 ) = c1 L (u1 ) + c 2 L (u 2 )
数学处理上的简便性,可使用的数学工具: 数学变换(傅里叶变换,拉普拉斯变换)、线性代数 实际系统——非线性的,有条件地线性化。
线性定常系统——方程中每个系数均为常数。
故设计方法为试行错误法,无法得到“最好的设计”。
给定传递函数
闭环特性分析
与给定指标比较
004
绪论
1950年代 , 是控制理论的“混乱时期”。
1960年代 , 产生了“现代控制理论”(状态空间法)。 庞特里亚金极大值原理 贝尔曼 动态规划法 可控、可观性理论
卡尔曼
极点配置
观测器
内模原理 至1970年代前半期,为状态空间法的全盛时期。
1895年,赫尔维茨稳定性分析——代数判据。
1945年, 波特频率法。 1948年,伊万思根轨迹法。
至此,古典控制理论(传递函数法)体系确定。
003
补
补
补
绪论
2、古典控制理论的局限性
①局限于线性定常系统:难以解决非线性、时变系统等问题。 ②采用输入/输出描述(传函),忽视了系统结构的内在特性, 难以解决多输入多输出系统(耦合)。 ③处理方法上,只提供分析方法,而不是综合方法。
现代控制理论-传递矩阵
λi Pi = APi
称pi为特征向量。
4. 4 状态方程的线性变换
选取不同的状态变量有不同形式的状态方程, 两组状态变量之间存在着线性变换。
x& = Ax + bu y = cx
x = px
x& = Ax + bu y = cx
= G(s)U(s) 【传递函数矩阵】
对于多输入多输出系统,初始条件为零时,输出 的拉氏变换与输入的拉氏变换之比,称为传递函数矩 阵,简称传递矩阵。
这里: G(s) = C(sI − A)−1B + D
(sI − A)−1 = adj[sI − A] sI − A
对于r维输入m维输出系统:
⎡Y1(s)⎤ ⎡G11(s) G12(s) L G1r(s)⎤⎡U1(s)⎤
b) 若A阵为友矩阵,且有n个互不相同的实数特 征值λi
⎡0 1 0 L 0 ⎤
⎢ ⎢
0
01
⎥ ⎥
A=⎢ ⎢ ⎢
O
⎥
1
⎥ ⎥
⎢⎣−a0 −a1 L
−an−1 ⎥⎦
sI − A = 0
λi
3
2011-3-10
则下边的范德蒙特矩阵使A对角化
⎡1 1 L 1⎤
⎢ ⎢
λ1
λ2
L
λn
⎥ ⎥
P
=
⎢ ⎢ ⎢
λ12 M
P变换,
变换矩阵: p = [ p1 p2 L pn ]
x = px x& = px& = Ax + bu = Apx + bu
x& = p−1Apx + p−1bu = Ax + bu
现代控制理论从状态空间表达式求传递函数矩阵
《现代控制理论》MOOC课程1.4从状态空间表达式求传递函数矩阵一. 传递函数矩阵的定义定义:对于多输入-多输出线性定常系统,输入向量为,输出向u =u 1u 2⋯u r T 量为, 且假定初始状态为零。
分别表示的拉氏y =y 1y 2⋯y m T ෝu i s ,ෝy i s u i ,y i ොy 1s =w 11s ොu 1s +w 12s ොu 2s +⋯+w 1r s ොu r sොy 2s =w 21s ොu 1s +w 22s ොu 2s +⋯+w 2r s ොu r s⋮ොy m s =w m1s ොu 1s +w m2s ොu 2s +⋯+w mr s ොu r sෝy (s)=ොy 1(s)⋮ොy m (s)=w 11s⋯w 1r s⋮⋯⋮w m1s⋯w mr s ොu 1(s)⋮ොu r (s)=W (s )ෝu (s )写成向量形式:称为系统的传递函数矩阵。
W (s )变换,表示第j 个输入端到第i 个输出端的传递函数,系统的输入输出关系可描述为:w ij (s )x=A x+Bu x0=0y=C x+Du结论:对应于状态空间描述W(s)=C(sI−A)−1B+D 其传递函数矩阵为:证明:lims→∞W s=D且有:W(s)并且,当D≠0时,为真有理分式矩阵,当D=0时,为严格真有理分式矩阵,W s对状态空间表达式取拉氏变换:s X(s)=AX(s)+BU(s)Y(s)=CX(s)+DU(s)由状态方程的拉氏变换表达式可得:X(s)=(sI−A)−1B U(s)Y(s)=(C(sI−A)−1B+D )U(s)代入输出方程的拉氏变换表达式可得:故传递函数矩阵为:W(s)=C(sI−A)−1B+D对于传递函数矩阵:W(s )=C (sI −A )−1B +D 考虑:(sI −A)−1=Τadj(sI −A )det (sI −A )且伴随矩阵每个元素多项式的最高次幂都小于的最高次幂,故adj (sI −A )det (sI −A )lim s→∞W s =D因此有:lim s→∞(sI −A )−1=0当D =0时,为严格真有理分式;W s 故当D ≠0时,为真有理分式;W s三. 传递函数矩阵的唯一性证明:一个系统的状态空间表达式是非唯一的,但其传递函数矩阵是唯一的。
系统的传递函数矩阵为PPT课件

G
f
(s
)
0 g2 (s)
0
0
,
gi
(s
)
0
0
0
g
p
(s
)
7
第7页/共47页
本节的基本内容:
➢ 预备引理; ➢ 可解耦的充要条件: 定理4-10,积分器解耦系统; ➢ 一种解耦控制律: 定理4-11。
8
第8页/共47页
二、 预备引理
1. 引理 1. 开、闭环传递函数矩阵的关系 :
G f (s) C[sI (A BK)]1BH =G(s)[I K(sI A BK)1B]H
ci
(sI
A)1B
ciB s
ci AB s2
ci Adi 1B sdi
ci Adi B sdi 1
共di 项 10
第10页/共47页
若在上式中,
但
ciB ciAB ciAdi 1B 0 Ei: ciAdi B 0,
(共有di项)
则我们得到了一个非负整数
di 0
di事实上是上式中由左向右s负幂次系数是零的项的个 数,它等价于使
14
第14页/共47页
例题4-5a 系统方程为 @p33
0 0 0 1 0
x
0
0
1
x
0
0 u
1 2 3 0 1
y
1 0
1 0
0 1
x
试计算di 和 Ei
解
c1B=[1 0], d1 =0; E1=[1 0]
c2B=[0 1], d2=0; E2=[0 1]
15
第15页/共47页
3. 开、闭环传递函数阵 引入非负整数 di 及非零行向量Ei后, 记
自动控制原理--传递函数相关知识
26.5
1
s 17.25
17.25
26.5
s (s 17.25)2 (26.5)2 (s 17.25)2 (26.5)2
所以
y(t)
1 e17.25t
cos 26.5t 17.25 e17.25t 26.5
sin 26.5t
1 e17.25t
cos
26.5t
17.25 26.5
sin
26.5t
D(s) a0sn a1sn1 an1s an D(s) 0即是系统的特征方程。
G(s) N (s) b0 (s z1)(s z2 ) (s zm ) D(s) a0 (s p1)(s p2 ) (s pn )
s zi (i 1, 2 m)是N (s) 0的根,称为传递 函数的零点,s pi (i 1, 2 n)是D(s) 0的根 是传递函数的极点。
因为组成系统的元部件或多或少存在惯 性,所以G(s)的分母阶次大于等于分子阶 次,即 n,是m有理真分式,若 ,我们m 就 n 说这是物理不可实现的系统。
二、传递函数的性质
(1)传递函数是一种数学模型,是对微分方程在零初始条件 下进行拉氏变换得到的;
(2)传递函数与微分方程一一对应;
(3)传递函数描述了系统的外部特性。不反映系统的内部物 理结构的有关信息;
R(s)
式中 ——环节的时间常数。
特点:输出量正比输入量变化的速度,能预示输 入信号的变化趋势。
实例:测速发电机输出电压与输入角度间的传递 函数即为微分环节。
5)振荡环节:其输出量和输入量的关系,由下面的 二阶微分方程式来表示。
T2
d 2 y(t) dt 2
2 T
dy (t ) dt
华中科技大学现代控制理论 2.5 传递函数阵
并联联结(1/4)
1. 并联联结
图2-15 并联联接组合系统方块结构图
并联联结(2/4)
设对应于图2-15示的并联联结的 组合系统的两个子系统的传递函 数阵为
G1 (s) C1 (sI A1 )1 B1 D1 G2 (s) C2 (sI A2 )1 B2 D2
其对应的状态空间表达式分别为
在传递函数矩阵的许多分析与计算问题中,涉及函数矩阵函数 矩阵(sI-A)的逆矩阵(sI-A)-1的计算问题。 当系统的阶数较高(方阵A的维数较大)时,应用此方法将 会遇到多项式矩阵函数的逆阵的计算量大,计算困难问题。 下面介绍一种计算 的实用递推算法,其证明可从相关的 《矩阵分析》的书籍中找到。
x1 A x1 B1u1 1 y1 C1 x1 D1u1
x 2 A2 x 2 B2 u2 y2 C2 x2 D2 u2
并联联结(3/4)
从图2-15可知 u1=u2=u
y1+y2=y
故可导出并联联结组合系统的状态 空间模型为
x1 A1 x 0 2
G11 ( s) G12 ( s) G ( s) G ( s) 22 G ( s) 21 ... ... Gm1 ( s) Gm 2 ( s)
... G1r ( s) ... G2 r ( s ) ... ... ... Gmr ( s)
其中Gij(s)描述了第i个输出与第j个输入之间的动态传递关系。
1
传递函数矩阵的推导(5/7)—例2-12
(2) 由传递函数计算公式可得
G ( s ) C ( sI A) 1 B s 1 1 2 [1 2] s 5 5 ( s 2)( s 4) 3 12s 59 ( s 2)( s 4)
传递函数矩阵和状态标准型
02 x 02
a3I2
I2 02 a2I2
02 02 I2 x02u a1I2 I2
2021/6/16
x1 0 0 1 0 0 0 x1 0 0
x2
0
0
0
1
0
0
x2
0
0
xx34
0 0
0 0
0 0
0 0
1 0
0 1
xx34
0 0
0 0
u1 u2
x5
2
0
5
0
4
0
x5
ci lsi m iG(s)(si)
2021/6/16
c3 9 c4 3
c11 3 c12 6
31
x1 3 1 0 0 x1 0
x2
0
3
0
0 x21u
xx34
0
0
0 0
2 0
01xx34
1 1
y 36 93 x 1 x 2 x 3 x 4T
问题:该系统状态空间模型的对偶式?
2021/6/16
0 0 4
1
AT
1
0
0
,
C
T
5
0 1 3
2
BT0 0 1
2021/6/16
18
推广到一般的传递函数:
G (s)b a((s s))sna b n n 1 1 ssn n 1 1 a ..n . 2s b n 1s 2 b .0 ..a0
此系统的能控标准型和能观标准型?
2021/6/16
19
3、对角标准型
若有:
G(s)Y(s) U(s)
sn
bmsm...b1sb0 an1sn1an2sn2 ...a0
传函阵

u x1(t) x(t) = x2(t)
G1 y1 y2
G2
x1(t) = A1 0
x2(t)
0 A2
x1(t) x2(t)
+ B1 B2
u
y(t) = [C1 C2 ]
x1(t) x2(t)
y
16
3. 具有输出反馈的闭环系统
u
e
y
G
H
Y(s) = G(s) E(s) E(s) = U(s) H(s)Y(s) [1 + G(s)H(s)]Y(s) = G(s) U(s)
3
设系统有r个输入变量,m个输出变量。
则传递矩阵的形式为:
G11(s) L
G(s)
M
O
Gm1(s) L
G1r (s)
M
ห้องสมุดไป่ตู้
Gmr (s)mr
若传递矩阵是方阵(m=r),通过适当线形变换化为
对角形,称为传递矩阵的解耦形式。
G11(s)
G(s)
G22 (s) O
0
0
Gmm (s)
可见,所谓解耦,即表示系统的第i个输出只与第 i个输入有关。与其它输入无关,实现了分离性控制。4
G11
Y U2
G2 1 G1G2
G12
Y (s) G11
G12
U1
U
2
G(s) G11 G12
8
1.7.3 由状态空间表达式求传递函数阵
x Ax Bu
y
Cx
Du
sX (s) AX (s) BU(s)
Y
(s)
CX
(s)
DU (s)
X (s) sI A 1 BU (s)
传递函数的基本性质
G (s) C (s) k(s z 1 )(s z2 )L (s zm ) R (s) (s p 1 )(s p 2 )L (s p n )
(2.24)
式中k为常数,-z1,…,-zm为传
递函数分子多项式方程的m个 根,称之为传递函数的零点; -p1,…,-pn为分母多项式方程的 n个根,称为传递函数的极点。
R C s U c ( s ) R C u c ( 0 ) U c ( s ) U r ( s ) (2.17)
式中 Uc(s)—— 输出电Uc(t)的拉氏变换; Ur(s)—— 输入电压Ur(t)的拉氏变换。
由上式求出Uc(s)的表达式:
U c(s)R C 1 s 1U r(s)R C R s C 1uc(0) (2.18) 当输入为阶跃电压ur(t)= u0·1(t)时,对Uc(s)求拉氏反变换,即得 uc(t)的变化规律:
具有延滞环节的系统叫做延滞系统。
如图2-13所示,当输入为阶跃信号,输出要隔一定时间t 后 才出现阶跃信号,在0<1<t 内,输出为零。
图2-1ቤተ መጻሕፍቲ ባይዱ 延滞环节
延滞环节的传递函数可求之如下:
c(t)= r(t-t)
其拉氏变换为:
C(s) r(tt)estdtr()es(t)d
0
0
etsR(s)
式中 = t-t,所以延滞环节的传递函数为:
uc(t)u0(1eR tC)uc(0)eR tC
式中第一项称为零状态响应, 由U(t)决定的分量; 第二项称为零输入响应, 由初始电压Uc (0)决定的 分量。
(2.19)
图2-5表示各分量的变化曲线, 电容电压Uc (t)即为两者的合成。
图2-5 RC网络的阶跃响应曲线
传递函数的基本性质

有:
Uc (s)
1 RCs
U 1
r
(s)
(2.20)
当输入电压ur(t)一定时,电路输出响应的拉氏变换Uc(s)完全由 1/(RCs+1)所确定,式(2.20)亦可写为:
Uc(s) 1 Ur (s) RCs 1
(2.21)
当初始电压为零时,电路输出函数的拉氏变换Uc(s)与输入 函数拉氏变换Ur(s)之比,是一个只与电路结构及参数有关的函数 。
于或等于分母的阶数n (m≤n) ,且所有系数均为实数。
2.传递函数只取决于系统和元件的结构和参数,与外作用 及初始条件无关。
3.传递函数的零、极点分布图也表征了系统的动态性能。 将式(2.23)中分子多项式及分母多 项式因式分解后,写为如 下形式:
G(s) C(s) k (s z1)(s z2 ) (s zm ) R(s) (s p1)(s p2 ) (s pn )
• 传递函数:对线性常微分方程进行拉氏变换,得到的系统 在复数域的数学模型----传递函数。 传递函数不仅可以表征系统的动态特性,而且可以研 究系统的结构或参数变化时对系统性能的影响。传递函数 是经典控制理论中最基本、最重要的概念
一、传递函数的概念
图2-4所示的RC电路中电
容的端电压Uc (t) 。根据克
现在对上述微分方程两端进行拉氏变换,并考虑电容上的 初始电压Uc (0),得:
RCsUc (s) RCuc (0) Uc (s) Ur (s) (2.17)
式中 Uc(s)—— 输出电Uc(t)的拉氏变换; Ur(s)—— 输入电压Ur(t)的拉氏变换。
由上式求出Uc(s)的表达式:
Uc (s)
图中零点用“o”表示,极点 用“X ”表示。
传递函数的基本性质
c(t) b0 r(t) a0
b0 /a0为输出输入的静态比。
5. 传递函数无法全面反映信号传递通路中的中间变量。多输 入多输出系统各变量间的关系要用传递函数阵表示。
三、典型环节及其传递函数
控制系统从动态性能或数学模型来看,可分成为以下几 种基本环节,也就是典型环节。 (一)比例环节
比例环节的传递函数为: G(s)= K (2.25)
第二节 控制系统的复数域数学模型
一、传递函数的概念 二、传递函数的性质 三、典型环节及其传递函数
引言
• 控制系统的微分方程:是在时域描述系统动态性能的数 学模型,在给定外作用及初始条件下,求解微分方程可以 得到系统的输出响应。但如果系统的某个参数变化或者结 构形式改变时,便需要重新列写并求解微分方程。
•
加强交通建设管理,确保工程建设质 量。17:17:4117:17:4117:17Thursday, October 29, 2020
•
安全在于心细,事故出在麻痹。20.10.2920.10.2917:17:4117:17:41October 29, 2020
•
踏实肯干,努力奋斗。2020年10月29日下午5时17分 20.10.2920.10.29
(2.19)
图2-5表示各分量的变化曲线, 电容电压Uc (t)即为两者的合成。
图2-5 RC网络的阶跃响应曲线
在式(2.19 )中,如果把初始电压Uc(0)也视为一个输入作用,
则根据线性系统的叠加原理,可以分别研究在输入电压Ur(t)
和初始电压Uc(0)作用时,电路的输出响应。若Uc(0) =0,则
•
相信相信得力量。20.10.292020年10月 29日星 期四5时17分41秒20.10.29
传递函数及其性质
传递函数及其性质2-6 传递函数求解控制系统的微分方程,可以得到在确定的初始条件及外作用下系统输出响应的表达式,并可画出时间响应曲线,因而可直观地反映出系统的动态过程。
如果系统的参数发生变化,则微分方程及其解均会随之而变。
为了分析参数的变化对系统输出响应的影响,就需要进行多次重复的计算。
微分方程的阶次愈高,这种计算愈复杂。
因此,仅仅从系统分析的角度来看,就会发现采用微分方程这种数学模型,当系统阶次较高时,是相当不方便的。
以后将会看到,对于系统的综合校正及设计,采用微分方程这一种数学模型将会遇到更大的困难。
目前在经典控制理论中广泛使用的分析设计方法——频率法和根轨迹法,不是直接求解微分方程,而是采用与微分方程有关的另一种数学模型——传递函数,间接地分析系统结构参数对响应的影响。
所以传递函数是一个极其重要的基本概念。
一、传递函数的概念及定义在[例2-7]中,曾建立了RC 网络微分方程,并用拉氏变换法对微分方程进行了求解。
其微分方程(2-44)为)()(t u t u dtdu RC r c c =+ 假定初始值0)0(=c u ,对微分方程进行拉氏变换,则有)()()1(s U s U RCs r c =+网络输出的拉氏变换式为)(11)(s U RCs s U r c += (2-48)这是一个以s 为变量的代数方程,方程右端是两部分的乘积;一部分是)(s U r ,这是外作用(输入量)的拉氏变换式,随)(t u r 的形式而改变;另一部分是11+RCs ,完全由网络的结构参数确定。
将上式(2-48)改写成如下形式 11)()(+=RCs s U s U r c 令11)(+=RCs s G ,则输出的拉氏变换式可写成 )()()(s U s G s U r c =可见,如果)(s U r 给定,则输出)(s U c 的特性完全由)(s G 决定。
)(s G 反映了系统(网络)自身的动态本质。
这很显然,因为)(s G 是由微分方程经拉氏变换得到的,而拉氏变换又是一种线性变换,只是将变量从实数t 域变换(映射)到复数s 域,所得结果不会改变原方程所反映的系统本质,对照)(s G 与原微分方程(2-44)的形式,也可看出二者的联系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(6-2)
右分母矩阵: p×p 阶方阵Dr(s);右分子矩阵: q×p 阶矩阵Nr(s); 左分母矩阵: q×q 阶方阵Dl(s); 左分子矩阵: q×p 阶矩阵Nl(s)。
例如,
n11
d11
n21
d21
n12
d12 n22
d 22
n13 n11
d13 n23
d c1 n21
d23 dc1
由此可以导出G(s)的左右MFD为
G(s) Dl1(s)Nl (s)
(s
2)(s
3) 2
1
(s 1)(s 3)(s 4)
(s
s 1 1)2 (s
4)
(s 1)(s 2)(s 3) (s 1)(s 3)2
s(s 3)2
s(s 3)(s 4)
2 MFD的特性 (1) MFD的实质 类似于SISO线性时不变系统的传递函数的分式化表示,
(3) MFD的不惟一性
对传递函数矩阵G(s),其右MFD和左MFD 不惟一,且不同的MFD可能 具有不同的次数。
【例7-2】给定2×2传递函数矩阵G(s)为
G(s)
(s
s 1)2 (s
s
2)
2
解 G(s)的两个MFD为
(s 2)2
s
(s
2)2
s
(s 2)2
G(s)
N1r
( s) D1r1 ( s)
d
r
2
nˆ21
nˆ12 nˆ22
nˆ13 nˆ23
Dl1 ( s) N l
(s)
dr2 dr2 dr2
其中dci是G(s)中第i列元素的最小公分母;dri是G(s)中第i行元素的最小公分母。
【例7-1】给定2×3传递函数矩阵G(s)为
s 1
G(s)
(s
2)(s 3) (s 1)
(2) MFD的次数
对传递函数矩阵G(s)的一个右MFD,规定
Nr(s)Dr-1(s) 的次数 = deg det Dr(s) 对传递函数矩阵G(s)的一个左MFD,规定
(7 –4)
Dl-1(s)Nl(s) 的次数 = deg det Dl(s)
(7 –5)
注:对于同一个G(s),其右MFD的次数和左MFD的次数一般不相等。
s s(s 1)2
s (s 1)2 (s 2)2
s
0
0 1
(
s
2)
2
G(s)
N2r
( s) D2r1 ( s)
s s
0 0
s2ຫໍສະໝຸດ s2) 2(s 1)2 (s 2) 1
n12
dc2 n22
dc2
n13
dc3 n23
n11 n21
dc3
n12 n22
n13 n23
d c1
0
0
0 dc2 0
0 1
0
Nr (s)Dr1(s)
dc3
nˆ11
d r1 nˆ21
nˆ12
d r1 nˆ22
nˆ13
d r1 nˆ23
dr1
0
0 1 nˆ11
考察G(s)是否为严格真有理矩阵或真有理矩阵,只要观察G(s)中的元素 gij(s) = nij(s)/dij(s) 是否有 deg nij(s) ≤ deg dij(s)。
数学上,对q×p有理分式矩阵G(s),总能因式分解成:
和 其中
右矩阵分式描述: G(s) = Nr(s)Dr-1(s) 左矩阵分式描述: G(s) = Dl-1(s) Nl(s)
1. 矩阵分式描述
2. 规范矩阵分式描述
3. 埃米特型、波波夫型、史密斯-麦可米伦型MFD
4. 传递函数矩阵的极点、零点和结构指数
5. 传递函数矩阵的评价值(略)
6. 传递函数矩阵的零空间和最小多项式基(略)
7.1 矩阵分式描述
MFD实质上就是把有理分式矩阵形式的传递函数矩阵G(s)表示为两个 多项式矩阵之“比”。MFD形式上则是对标量有理分式形式传递函数g(s)相 应表示的一种自然推广。
本章后半部分讨论传递函数矩阵的结构特性,它是复频域分析和综合的 基础。传递函数矩阵的结构特性由极点和零点的分布属性、极点和零点的不 平衡属性表示:
极点和零点的分布属性:决定系统的稳定性和运动行为; 极点和零点的不平衡属性:反映系统的奇异特性和奇异程度。 其中,我们需要重点掌握的内容包括Smith-McMillan型、结构指数、极点和 零点。 本章主要内容
s 1
(s 1)(s 4) s(s 1)
(s 1)(s 2)(s 3)
(s 3)2
s(s 2)
(s 2)(s 3)2
(s 3)(s 4)
1 (s 1)(s 2)
进而,构造G(s)的左MFD。为此,定出G(s)各行的最小公分母如下: dr1(s) = (s+2)(s+3)2 , dr2(s) = (s+1)(s+3)(s+4)
g(s) n(s) n(s)d 1(s) d 1(s)n(s) d (s)
(7 3)
MIMO线性时不变系统的传递函数矩阵的MFD G(s) = Nr(s)Dr-1(s) = Dl-1(s)Nl(s)
实质上,上式也属于G(s)的分式化表示。因此,称Dr(s)、Dl(s)为G(s)的分母 矩阵,Nr(s)、Nl(s)为G(s)的分子矩阵。
1 右MFD和左MFD 考虑p维输入和q维输出的连续线性时不变系统,其输入输出关系的传递
函数矩阵G(s)为q×p有理分式矩阵,其表示形式为
n11 ( s) d11 ( s)
G(s)
nq1
(
s)
dq1(s)
n1p (s)
d1
p
(s)
nqp
(s)
dqp (s)
(7 1)
严格真有理矩阵:有理矩阵 G(s) 满足 G(∞) = 0。 真有理矩阵:有理矩阵 G(s) 满足 G(∞) = G0 (非零常数)。
第七章
传递函数矩阵的矩阵分式描述与结构特性
引言
传递函数矩阵的矩阵分式描述(MFD, Matrix Fraction Description)是复 频域理论中表征线性时不变系统输入输出关系的一种基本模型。本章前半部 分将对MFD做较为系统和全面的讨论,主要内容包括MFD的形式、构成、 真性、严真性和不可简约性等。
2
s 3
s 1 s3 s3 s4
s
s
s
2
s 1
解 首先构造G(s) 的右MFD。为此,定出G(s)各列的最小公分母如下: dc1(s) = (s+2)(s+3)2 , dc2(s) = (s+3)(s+4) ,dc3(s) = (s+1)(s+2)
由此可以导出G(s)的右MFD为
G(s) Nr (s)Dr1(s)