人体中的杠杆
人体骨杠杆的分类及其在康复过程
人体骨杠杆的分类及其在康复过程的原理应用
人体骨杠杆可分为三类:
①平衡杠杆:关节中心位于肌肉的动力点与运动环节的阻力点之间。
②省力杠杆:运动环节的阻力点在关节中心与肌肉的动力点之间。
③速度杠杆:肌肉的动力点在关节中心与运动环节的阻力点之间。
杠杆原理应用:
①利用杠杆原理省力:增大动力臂和缩短阻力臂。
例如,通过某些骨性结构增大肌肉力臂;提起重物时,让重物越靠近身体,缩短阻力臂,就越省力。
一②利用杠杆原理获得速度:缩短力臂和增大阻力臂。
例如,身体上肌肉起、止点一般靠近关节中心,即力臂较短。
③利用杠杆原理发展肌肉力量:增加阻力和延长阻力臂。
例如,增加阻力负荷;仰卧举腿时,直腿延长阻力臂来发展肌肉力量。
人体中的杠杆
人体中的杠杆河南省平顶山市卫东区田选学校范俊奇骨骼肌肉和关节构成了人体的运动系统,尽管人体的运动相当复杂,但最基本的运动都是有骨骼绕关节转动产生的,其模型就是杠杆。
杠杆分为等臂杠杆、省力杠杆、费力杠杆三种类型,这些类型在我们人体中都是存在的。
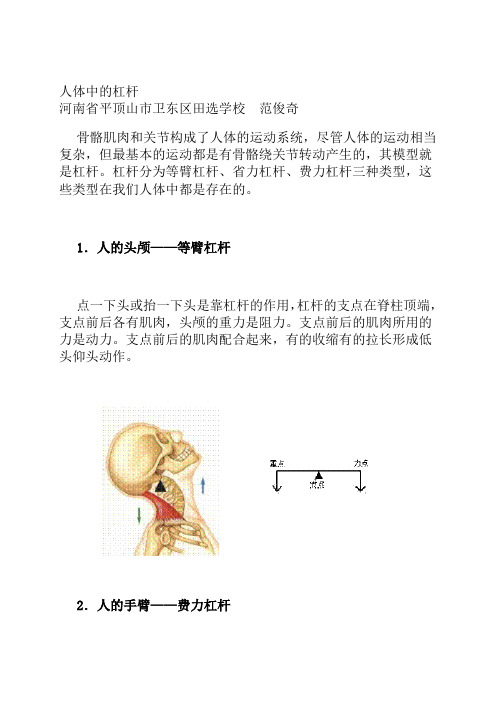
1.人的头颅——等臂杠杆点一下头或抬一下头是靠杠杆的作用,杠杆的支点在脊柱顶端,支点前后各有肌肉,头颅的重力是阻力。
支点前后的肌肉所用的力是动力。
支点前后的肌肉配合起来,有的收缩有的拉长形成低头仰头动作。
2.人的手臂——费力杠杆人的手臂绕肘关节转动,可以看成是由肌肉和手臂骨骼组成的杠杆在转动。
肘关节是支点,肱二头肌肉所用的力是动力,手拿的重物的重力是阻力,显然我们的前臂是一种费力杠杆,举起一个重物,肌肉要化费约6倍以上的力气。
虽然费力,但是可以省距离(少移动距离),提高工作效率。
3.走路时的脚——省力杠杆我们走路抬起脚时,脚就是一个杠杆。
脚掌根是支点,人体的重力就是阻力,腿肚肌肉产生的拉力就是动力。
杠杆模型如图所示。
这种杠杆可以克服较大的体重。
除上述三个部位之外,在身体中还有多处杠杆。
如:小腿绕膝盖的转动可看成小腿肌肉和胫骨组成的杠杆;弯腰时,腰部肌肉和脊骨之间形成杠杆;奔跑时,向前跨步,右腿的髂腰肌收缩、臀大肌松弛,使右大腿抬起;股四头肌松弛,股二头肌收缩,使右膝弯曲。
仰卧起坐时,上身受到腹肌和上身重力的作用。
这些杠杆模型怎样?是哪种类型的杠杆?请同学们相互讨论,并请教老师。
人体中的杠杆作者:潘艳艳文章来源:收集整理点击数:5381 更新时间:2009-5-11人身上有206块骨,其中有许多起着杠杆作用,当然这些起杠杆作用的骨不可能自动地绕支点转动,必须受到动力的作用,这种动力来自附着在它上面的肌肉,肌肉靠坚韧的肌健附着在骨上。
例如肱二头肌上端肌腱附着在肩胛骨上,下端肌腱附着在桡骨上(如图),肱三头肌上端有肌腱分别附着在肩胛骨和肱骨上,下端附着在尺骨上。
人前臂的动作最容易看清是个杠杆了,它的支点在肘关节。
2020-2021学年浙教版科学中考第一轮复习--物理模块(八):杠杆及其应用【word,含答案】
一、杠杆1.杠杆:如果一根硬棒在力的作用下能够绕着固定点转动,这一根硬棒就叫做杠杆。
2.杠杆五要素:支点(O)、动力(1F)、阻力(2F)、动力臂(1L)、阻力臂(2L)①支点:硬棒绕着转动的固定点。
②力的作用线:力所在的直线。
③力臂:支点到力的作用线的距离。
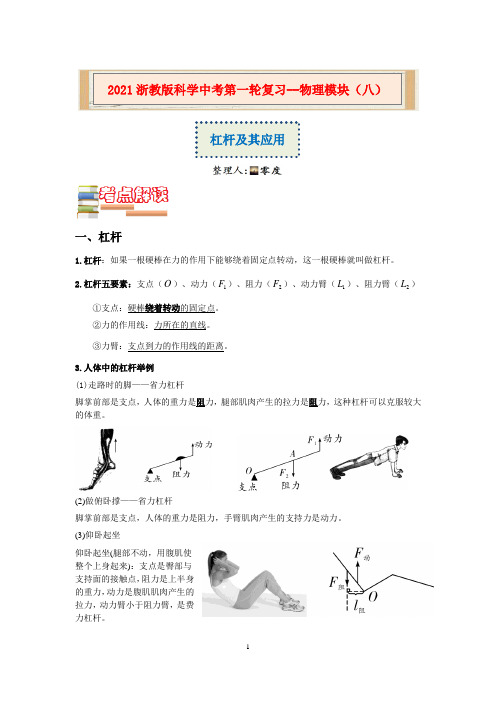
3.人体中的杠杆举例(1)走路时的脚——省力杠杆脚掌前部是支点,人体的重力是阻力,腿部肌肉产生的拉力是阻力,这种杠杆可以克服较大的体重。
(2)做俯卧撑——省力杠杆脚掌前部是支点,人体的重力是阻力,手臂肌肉产生的支持力是动力。
(3)仰卧起坐仰卧起坐(腿部不动,用腹肌使整个上身起来):支点是臀部与支持面的接触点,阻力是上半身的重力,动力是腹肌肌肉产生的拉力,动力臂小于阻力臂,是费力杠杆。
杠杆及其应用2021浙教版科学中考第一轮复习--物理模块(八)二、杠杆平衡1. 杠杆平衡:若杠杆处于静止或匀速转动状态,我们就称杠杆处于平衡状态;即杠杆平衡2. 杠杠平衡的条件(杠杆原理):动力×动力臂=阻力×阻力臂 2211L F L F =三、杠杆的分类力臂关系 力的大小关系 杠杆类型工作特点 实例 21L L >21F F < 省力杠杆 省力费距离 老虎钳、开瓶器、指甲刀 21L L <21F F > 费力杠杆 费力省距离 筷子、镊子、钓鱼竿、划桨 21L L = 21F F = 等臂杠杆 不省力也不费距离 托盘天平四、杠杆平衡的应用1.杠杆动态平衡问题:F 1L 1=F 2L 2通过该公式我们可以看出,如果该公式中其中一个或多个物理量(自变量)发生变化的时候,要使得该杠杆仍然处于平衡状态的,那么其他的物理量也会发生变化(因变量)。
我们一般先讨论起自变量的变化规律,然后通过函数关系,确认因变量如何变化。
2.杠杆动态解题思路:①列出平衡方程F 1L 1=F 2L 2,并将题目给出各物理量对应平衡的公式中②分析杠杆变化过程,确认自变量③根据平衡方程确认因变量的变化趋势例1. (2020杭州)杆秤是一种用来测量物体质量的工具。
骨的杠杆作用是什么

骨的杠杆作用是什么引言在生物学中,骨骼是组成脊椎动物的重要组成部分之一。
除了提供支持和保护身体器官外,骨骼还承担着身体运动和姿势维持的功能。
骨骼结构中的骨骼关节起到起重、调节运动和传递力量的作用。
其中,骨的杠杆作用是骨骼关节中一个重要的生理功能。
什么是杠杆在物理学中,杠杆是一种简单机械装置,通过在支点周围施加力来产生力的增益或方向上的改变。
杠杆由三个主要部分组成:支点、力臂和负担臂。
它利用立足点作为支撑点,通过施加力臂与负担臂的长度比例来实现力量的放大。
骨的杠杆作用骨的杠杆作用是指当肌肉施加力时,由于关节的设置,使得产生的力被放大或产生方向上的改变。
这种杠杆作用有助于身体的运动和姿势的维持。
下面将介绍骨的杠杆作用在不同部位的具体应用。
上肢在上肢,例如手臂,骨的杠杆作用发挥着重要的作用。
当你举起物体时,肌肉产生的力通过骨骼关节传递到骨头上。
这个关节作为支点,骨与肌肉之间的力臂和负担臂分别代表了肌肉与关节的距离。
因此,手臂的骨骼结构允许你使用较少的力量来举起较重的物体。
下肢类似于上肢,下肢的骨骼结构也利用杠杆作用来实现身体的运动。
例如,当你踢球时,肌肉会产生力量,通过骨骼关节传递到骨头上。
由于腿部骨骼的合理布局和关节的设置,你可以踢出具有较大力量和速度的球。
脊柱脊柱是人体骨骼中一个重要的结构,它由一系列称为椎骨的骨头组成。
脊柱的骨骼结构允许身体保持直立,并分担上肢、下肢以及头部的负荷。
脊柱中的椎骨之间的杠杆作用使得身体可以通过肌肉的收缩和放松来保持平衡和稳定。
骨的杠杆作用与生活除了在生理学中的作用外,骨的杠杆作用在日常生活中也有许多实际应用。
锤子当我们使用锤子敲击钉子时,锤子本身充当了杠杆。
手柄成为力臂,而头部则是负担臂。
通过控制手柄与头部的长度比例以及施加的力的大小,我们可以轻松地敲入钉子。
剪刀剪刀是一种常见的工具,也是一种杠杆。
两个刀刃之间的关节充当支点,手柄作为力臂,刀刃作为负担臂。
这种结构使得我们可以通过施加较小的力量来进行剪切操作。
颈椎杠杆原理

颈椎杠杆原理颈椎杠杆原理是指人类颈椎骨与头部负载之间的作用力和力臂之间的关系。
在生活中,人类颈椎承担了头部和上半身的重量和运动,因此在某些情况下,颈椎可能会受到压力和受伤。
了解颈椎杠杆原理能帮助我们预防和减少受伤的发生。
颈椎结构颈椎由七个骨头组成,号码从上到下分别为C1、C2、C3、C4、C5、C6和C7。
C1又称为寰枢椎,是与头部连接的第一个椎骨。
C2又称为枢椎,连接在C1上方,C2上的凸起部分称为牙突。
颈椎杠杆原理颈椎杠杆原理是力和力臂之间的关系,力是作用在物体之上的力,力臂是从支点到力的作用点的距离。
当人们进行一些头部动作时,下颌、颈椎、头和身体重量之间的力和力臂会产生不同的关系。
颈椎杠杆原理用于描述颈椎和头部的相互作用,一般包括以下几个概念:力臂:力臂是从支点到施力点的距离,通常用字母L表示。
在颈椎中,下颚和头部的质量是力,它们与C1和C2形成杠杆系统。
支点:支点是杠杆运动中的固定点,一般用字母O表示。
在颈椎系统中,支点为颈椎之间的关节。
力:力是对物体的影响,例如压力、重力和拉力。
在颈椎中,头部和上半身的重量产生了作用力。
角度:角度是两个相互作用的物体之间形成的角度,它用度数或弧度来衡量。
在颈椎中,角度通常是颈椎的屈曲状态。
根据颈椎杠杆原理,当头部与颈椎发生运动时,施力点和支点之间的距离和角度变化可以极大地影响颈椎所承受的力和力臂。
具体来说,头部前倾会增加颈椎所承受的压力,而后仰则会增加颈椎所承受的拉力。
当头部旋转时,颈椎也可能承受一些扭转力。
颈椎受伤的原因颈椎受伤是一种常见的疾病,其症状包括颈部疼痛、僵硬、头痛和肩膀痛等。
颈椎受伤的原因可能包括以下几点:外伤:颈部受到急剧的伤害,例如车祸或运动中的颈部撞击。
长期不良姿势:保持同一姿势太久、电子产品使用过度等可导致肌肉疲劳和颈椎损伤。
缺乏锻炼:长期缺乏锻炼或运动不规律,肌肉发达度差,易受损伤。
颈椎杠杆原理的应用颈椎杠杆原理可以帮助我们优化颈部姿势,减少颈椎疼痛和损伤。
杠杆原理在人体中的应用副本
➢ 第二类杠杆:省力杠杆 阻力点在支点和动力点之间
➢ 第三类杠杆:费力(速度)杠杆 动力点在支点和阻力点之间
3.1第一类杠杆
平衡杠杆
➢ 支点位于动力点和阻力点之间 ➢ 传递力和平衡,即产生力又产生速度
阻力F2 阻力臂L2
动力F1 动力臂L1
支点
3.2第二类杠杆
省力杠杆
➢ 阻力点在支点和动力点之间
支点
➢ 动力臂大于阻力臂,用较小的力
克服较大的阻力
= F1 X L1 F2 X L2
小大
大小
阻力F2
动力F1
阻力臂L2 动力臂L1
3.3第三类杠杆
费力(速度)杠杆
➢ 动力点在支点和阻力点之间
➢ 动力臂小于阻力臂,动力小于阻力 支点 ➢ 获得较大的运动速度和幅度
= F1 X L1 F2 X L2
大
小
小
大
动力F1 动力臂L1
阻力臂L2
阻力F2
人体中普遍存在杠杆系统
4.人体中的杠杆
➢ 支点: 关节 ➢ 动力: 收缩的肌肉 ➢ 阻力: 肢体的重力,拮抗肌张力,韧带
筋膜的张力,外物的重力
4.人体中的杠杆
4.人体中的杠杆
4.人体中的杠杆
Force
second-class lever
4.人体中的杠杆
? Fi X Li Fo X Lo
2.杠杆的力学原理
力矩
➢ 物理学里,作用力促使物体绕着转动轴或支点转动的趋向 ➢ 大小为力与力臂的乘积,单位牛顿.米 ➢ 方向逆正顺负
力臂
➢ 支点到力的作用线的垂直距离。 ➢ 与动力对应的力臂叫动力臂 ➢ 阻力对应的力臂叫阻力臂
人体力学常用原理

在人体力学中,常用的原理包括以下几个:
杠杆原理:杠杆原理是指在施加力的作用下,通过杠杆的作用使物体发生平衡或产生运动。
人体中的关节和骨骼系统可以看作是杠杆系统,通过肌肉的收缩和骨骼的支撑,实现身体的平衡和运动。
力的平衡原理:根据力的平衡原理,当物体受到多个力的作用时,这些力的合力为零,则物体保持静止或匀速运动。
在人体力学中,通过调整身体的姿势和肌肉的力量分配,可以使身体保持平衡,避免受伤。
力的分解原理:力的分解原理指的是将一个力分解为多个分力的合力等于原力的原理。
在人体力学中,可以利用力的分解原理来分析人体运动中的各个力的作用和平衡关系,从而优化运动技巧和减少受力的不利影响。
压力分布原理:根据压力分布原理,物体受到的压力是作用在其表面上的力在单位面积上的分布情况。
在人体力学中,研究人体受力的分布情况可以帮助设计合适的座椅、床垫等,减少压力对身体的影响。
能量守恒原理:能量守恒原理指的是能量在系统中的总量是恒定的,能量可以从一种形式转换为另一种形式,但总能量不变。
在人体力学中,研究人体运动时的能量转化和能量损耗,可以帮助合理安排运动和活动,提高运动效率。
这些常用的人体力学原理在运动训练、人体工程学、康复医学等领域中得到广泛应用,帮助人们理解和优化人体的运动和姿势,提高身体的健康和功能。
关节中的杠杆原理

关节中的杠杆原理
关节中的杠杆原理是指人体关节的运动机制可以借助杠杆的作用来实现。
在人体关节中,骨骼和肌肉的组合起到了杠杆的作用,使得我们的身体能够完成各种复杂的动作。
关节的杠杆原理基于力的平衡,根据力的大小和作用的位置来决定关节的运动方式及其力量传递。
在关节中,骨头充当着杠杆的作用,肌肉则是提供动力的源泉。
举例来说,人体的肘关节是一个很经典的杠杆系统。
当我们伸直手臂时,肘关节处于伸肌(肌肉)和受力点(手掌)之间,而重力则是作用在受力点上的力。
此时,我们的肌肉需要施加一个与重力相等但方向相反的力,以使得手臂保持伸直。
如果我们想让手臂弯曲,肌肉则需要施加一个更大的力来平衡重力,并使手臂弯曲。
同样的原理也适用于其他关节,例如膝关节和踝关节。
在这些关节中,肌肉施加的力可以通过杠杆的作用,转化为使关节以某种方式运动的力。
这使得我们能够行走、跑步、跳跃等各种活动。
总的来说,关节中的杠杆原理是人体运动的基础,通过杠杆作用使得肌肉的力量能够更高效地传递到骨骼上,实现各种复杂的动作。
骨为什么起杠杆作用

骨骼为什么起杠杆作用骨骼是人体内部的重要组成部分,它不仅提供支撑和保护内脏器官的功能,还承担着运动和代谢的重要角色。
骨骼之所以能够起到杠杆作用,主要归因于其结构和功能的特点。
结构特点人体的骨骼系统由多个骨骼组成,这些骨骼通过关节连接在一起,形成一个整体。
骨骼的基本单位是骨骼细胞,它们构成了骨骼的组织结构,并分布在骨骼的内部和外部。
骨骼细胞负责骨骼的建造和修复工作,从而保持骨骼的结构完整和功能正常。
骨骼主要由两种组织构成:骨质和骨髓。
骨质是一种坚硬的组织,由钙盐和胶原纤维组成,它使骨骼具有抗压和抗张强度。
骨髓则是一种软骨组织,主要分布在骨骼的空洞部分,功能是产生血细胞和存储脂肪等。
骨骼的整体结构分为长骨、短骨、扁骨和不规则骨四种类型,每种类型的骨骼都具有特定的形状和功能。
长骨的主要作用是支撑和传递力量,短骨和扁骨则提供一定的运动范围和灵活性,而不规则骨则用于填充和连接其他骨骼。
功能特点骨骼在人体内发挥了多种重要的功能,其中起到杠杆作用的主要体现在运动功能方面。
杠杆作用骨骼通过关节连接在一起,形成可动的骨架系统。
骨骼与肌肉之间通过肌腱相连,肌肉的收缩和伸展可以带动骨骼进行运动。
在运动过程中,骨骼充当了一种杠杆的作用。
以骨骼的某个关节为支点,肌肉收缩产生的力量作用在骨骼上,从而实现身体的运动。
杠杆原理指的是通过改变支点和力点的位置来改变力量的作用效果。
在人体骨骼的运动中,关节作为支点,骨骼和肌肉则相当于杠杆的杠臂和力臂。
肌肉收缩产生的力量通过杠杆的作用,将力量转移到骨骼上,从而产生运动。
稳定支撑除了运动功能,骨骼还起到稳定和支撑身体的作用。
骨骼结构的稳定性使得人体能够保持良好的姿势和平衡,不容易受到外界力量的干扰。
骨骼系统还支撑着身体的内脏器官,保护它们免受外部伤害。
例如,头骨保护了大脑,胸骨保护了心脏和肺部,骨盆则保护了盆腔器官。
这种稳定的支撑作用使得人体内部的器官能够得到有效的保护,并顺利地完成其功能。
身体杠杆原理及应用

身体杠杆原理及应用身体杠杆原理是指人体在进行运动过程中利用杠杆原理产生力矩,使得运动更加高效和顺利。
杠杆原理是物理学中的基本原理之一,它描述了一个刚体在受力作用下的平衡情况。
身体杠杆原理在人体运动中起到了重要的作用,广泛应用于日常生活和运动训练中。
身体杠杆原理的基本原理是力矩的平衡。
一个杠杆系统由杠杆、支点和力组成,当力矩的和为零时,杠杆保持平衡。
力矩可以通过力的大小和力臂的长度来计算,力臂是力作用点到转轴的垂直距离。
在一个杠杆系统中,力矩只取决于力的大小和力臂的长度,与力的方向无关。
杠杆原理在人体运动中的应用非常广泛。
例如,人体的骨骼系统可以看作一个由骨头组成的杠杆系统。
肌肉是通过骨骼来施加力,使得身体能够进行各种动作。
人体的关节就是杠杆的支点,力臂则是力作用点与关节轴线的距离。
通过合理地运用杠杆原理,人体可以在运动中产生较大的力矩,从而能够完成更复杂的动作。
比如举起重物的运动中,人体的肌肉通过关节施加力来提供足够的力矩,将重物举起。
如果重物离关节轴线较远,即力臂较长,那么需要施加较小的力就能够产生足够的力矩,这样可以减少肌肉的负荷,使得举重动作更加轻松。
而如果重物离关节轴线较近,即力臂较短,那么需要施加较大的力才能够产生足够的力矩,这样肌肉的负荷就会增加,举重动作会变得困难。
身体杠杆原理也可以应用到运动训练中。
例如,在举重运动中,举重选手会合理调整身体姿势,使得力臂最大化,从而产生较大的力矩。
在摔跤运动中,运动员会利用对手的力量和杠杆原理来完成技巧动作。
在跳跃运动中,运动员会通过调整身体姿势和力的施加点,使得力矩最大化,从而完成更高的跳跃。
身体杠杆原理还可以应用于日常生活中。
比如,一个人用榔头敲击钉子时,为了更加轻松地敲入钉子,可以在榔头上选择一个合适的敲击点,使得力矩最大化,这样就可以用较小的力将钉子敲入。
总之,身体杠杆原理是人体运动中的重要原理,广泛应用于日常生活和运动训练中。
通过合理利用杠杆原理,人体可以产生较大的力矩,实现更高效和顺利的运动。
人体中的杠杆

人体中的杠杆协作学习第组:目的:探索人体中的各种杠杆的原理及作用方法摘要:人体的骨骼和肌肉可以组成各种不同的杠杆以便利人体的运动。
骨骼可以起到杠杆臂的作用,骨头之间的关节通常是杠杆围绕其转动的支点,而肌肉则可提供使杠杆转动的作用力。
[1] 本文针对杠杆原理在人体中的体现以及在康复治疗中的应用将展开进行综述。
第一部分杠杆的原理研究杠杆是指在外力作用下能绕着杆上一固定点或固定轴转动的简单机械,杠杆的受力点称为力点,固定点称为支点,克服阻力的点称为重点。
身体中的大多数机械都是由肌肉和骨骼组成的。
每做一个动作,都要用到肌肉。
骨骼和肌肉是由人体内强劲的连接组织——韧带连接在一起的。
韧带和肌肉牵动骨骼,使它像杠杆一样工作。
韧带与骨骼相连的地方——关节就相当于杠杆的支点,肌肉则产生动力。
[2]力臂是关节中心到肌肉拉力线的垂直距离,阻力臂是从关节中心到阻力作用线的垂直距离。
在人体中,骨在肌拉力作用下围绕关节轴转动,它的作用和杠杆相同,称为骨杠杆。
人体的骨杠杆运动有三种形式:1.平衡杠杆:支点在力的作用点和重力作用点之间。
杠杆的动力臂等于阻力臂,平衡时动力等于阻力。
这样的杠杆既不省力,也不省距离。
如颅进行的仰头和俯首运动。
2.省力杠杆:重力作用点在支点和力的作用点之间。
杠杆的动力臂大于阻力臂,平衡时动力小于阻力,这样的杠杆省力但费距离。
如行走时提起足跟的动作,这种杠杆可以克服较大的体重。
当把脚尖翘起来的时候,是脚跟后面的肌肉在起作用,脚尖是支点,体重落在两者之间。
这是一个省力杠杆,肌肉的拉力比体重要小。
而且脚越长越省力。
3.速度杠杆:力的作用点在重力作用点和支点之间。
杠杆的动力臂小于阻力臂,平衡时动力大于阻力,这样的杠杆不省力但省距离。
人体中的杠杆大部分都是费力的,如肘关节的活动,这种活动必须以较大的力才能克服较小的重力,但运动速度和范围很大。
人前臂的动作是杠杆运动,它的支点在肘关节。
当肱二头肌收缩、肱三头肌松弛时,前臂向上转,引起曲肘动作;而当肱三头肌收缩、肱二头肌松弛时,前臂向下转,引起伸肘动作。
关节中的杠杆原理

关节中的杠杆原理杠杆原理是物理学中的基本概念之一,它描述了力量如何通过杠杆作用在物体上。
杠杆可以将一个小力转换成一个更大的力,同时改变了方向和大小。
关节中的杠杆原理则是指关节对身体的运动起到杠杆作用的机制。
人体关节是连接骨骼的结构,它们使我们能够运动。
关节的构造包括骨骼、肌肉、韧带和软骨等组织。
在进行任何运动时,骨骼和肌肉都会相互配合以实现所需运动。
关节中的杠杆原理主要通过肌肉的收缩和拉伸来实现。
肌肉是由肌纤维组成的,而肌纤维可以收缩或拉伸。
当肌纤维收缩时,形成的力会通过韧带传递到骨骼上,从而使关节产生运动。
在关节中的杠杆原理中,肌肉起到了重要的作用。
肌肉通常通过与骨骼相连的肌腱来实现对骨骼的控制。
肌腱是一种坚韧的结缔组织,它通过将肌肉与骨骼连接起来,使肌肉的收缩力可以转化为骨骼的运动。
关节中的杠杆原理可以通过杠杆的原始定义来解释。
根据杠杆原理,力矩的大小等于力与力臂的乘积。
力臂是关于杠杆旋转轴的垂直距离。
在关节中,肌腱就相当于杠杆,骨骼就相当于杠杆原理中的旋转轴。
而肌肉的收缩就相当于力的作用。
通过改变肌肉的力矩,我们可以调整杠杆的机械优势来实现所需的骨骼运动。
在关节中,肌肉的力矩取决于肌肉的收缩力和力臂的长度。
当肌肉收缩时,力矩会增大,这样就可以产生更大的力。
同时,肌肉的收缩还会改变力臂的长度。
力臂越长,力矩越大,从而使关节的运动效果更为显著。
关节中的杠杆原理也可以解释为什么我们可以通过肌肉的收缩控制骨骼的运动方向。
不同肌肉的位置以及肌肉与骨骼之间的连接方式使得肌肉的收缩方向和力臂方向可以产生不同的力矩。
通过调整肌肉的收缩力和力臂的方向,我们可以实现不同方向的关节运动。
总结起来,关节中的杠杆原理是通过肌肉的收缩和拉伸来实现的,它使肌肉的力转化为骨骼的运动。
关节中的杠杆原理可以通过改变肌肉的收缩力和力臂的长度来调整力的大小和方向。
这种杠杆作用使我们能够进行各种各样的身体运动,并且使我们的身体能够灵活地适应不同的环境和需求。
为什么说骨起杠杆作用
为什么说骨起杠杆作用骨骼是人体内最重要的支撑系统之一。
它由多种组织构成,包括骨头、关节和韧带等,相互配合以提供机械支撑和运动能力。
但骨骼的功能远不止于此,它还扮演着身体内部杠杆作用的重要角色。
在物理学中,杠杆是一种简单机械装置,它由一个支点和两个作用力组成。
骨骼与杠杆装置有相似之处,因为它可以通过骨骼支点和肌肉作用力进行杠杆作用。
这是为什么说骨骼具有杠杆作用的原因之一。
力与杠杆作用骨骼的杠杆作用可以通过力和力臂来理解。
力是指施加在物体上的作用力,通常用来改变物体的状态或形状。
在人体中,肌肉收缩产生的力将通过骨骼传递,并产生杠杆作用。
力臂是力作用点到支点的垂直距离。
在一个杠杆装置中,力臂越大,杠杆作用越明显。
类似地,在骨骼中,力臂的大小会影响骨骼杠杆作用的效果。
骨骼结构与杠杆作用骨骼结构也决定了杠杆作用的程度。
骨头是组成骨骼的主要组织,其形状和结构使之成为良好的杠杆。
长骨是骨骼中最常见的类型,如上肢和下肢的骨骼。
它们具有中间扩大的部分,称为骨干。
骨干的形状使之成为杠杆作用的理想候选者。
通过肌肉的收缩,力可以通过骨干传递,产生杠杆效应。
此外,关节也对杠杆作用起到重要作用。
关节是连接两个骨头的区域,它们允许骨头围绕特定轴线移动。
通过调整关节的角度,人体可以通过骨骼杠杆作用产生更大的力量或更大的速度。
骨骼杠杆作用的意义骨骼的杠杆作用对人体具有重要的意义。
首先,骨骼的杠杆作用使人体能够进行各种复杂的运动。
例如,通过肱骨与尺骨的杠杆作用,人体可以进行各种臂部动作,如挥拳、举重等。
这种杠杆作用使得人体可以更高效地进行运动,减少肌肉的耗能。
其次,骨骼的杠杆作用有助于保护关节和其他组织。
通过将外部作用力分散到更大的面积上,骨骼能够减少对关节和韧带的损伤风险。
这是为什么演奏乐器时需要保持正确手部姿势的原因之一。
最后,骨骼的杠杆作用还可以改善人体的平衡。
通过调整骨骼的角度和位置,人体可以更好地保持平衡。
这对于日常生活和各种运动活动都具有重要意义。
关节运动的杠杆原理

关节运动的杠杆原理
关节运动的杠杆原理是指在关节处施加力量,通过杠杆作用来产生和控制运动。
杠杆原理的基本概念是通过在支点上施加力量来实现运动。
关节是人体骨骼系统中连接两个骨头的部分,它充当着杠杆的支点。
身体的肌肉通过牵引或收缩来施加力量,从而在关节处产生运动。
在关节上,骨头被连接和支持着,这种连结通常由肌肉、韧带和其他软组织完成。
略微改变这些结构的角度,就可以改变施加在关节上的力。
当施加力量时,肌肉缩短并扩展,形成力臂和运动力。
这种力量的应用会导致在关节上旋转和移动骨头,从而让身体完成各种动作。
在关节运动中,杠杆原理的作用可以解释为力量和力臂的乘积等于负载和负载臂的乘积。
负载是指施加在关节上的外部力,负载臂是从关节中心到外部力的距离。
力量是施加在关节的肌肉收缩所产生的力,力臂是从关节中心到施加力的肌肉起点的距离。
通过改变力量臂、负载臂和力量的大小和方向,可以实现不同类型的运动。
例如,当力量臂较长且大于负载臂时,施加的力量可以产生较大的旋转力,从而使关节快速移动。
相反,当负载臂较长且大于力量臂时,施加的力量需要更大才能移动关节。
总的来说,关节运动的杠杆原理是通过调整力臂、负载臂和力
量的大小和方向,来控制身体在关节处的运动。
这种原理在人体运动中起着至关重要的作用,使我们能够完成各种动作,如走路、跑步、举重等。
关节中的杠杆原理
关节中的杠杆原理杠杆原理是物理力学中的基本原理之一,它描述了在杠杆系统中力的平衡和作用的关系。
关节是人体骨骼系统中连接两个或多个骨头的部分,通过关节的作用可以实现人体的运动。
在关节中应用杠杆原理,可以解释关节力的平衡和身体平衡的原理。
首先,我们来探讨关节中的力的平衡问题。
在一个关节中,骨头和肌肉通过肌腱来连接。
当肌肉收缩时,通过肌腱的拉力作用于骨头上。
根据杠杆原理,力的平衡可以通过力矩的平衡来实现。
力矩是用来描述力在杠杆上的作用效果的物理量,它等于力的大小乘以力臂的长度。
力臂是指力作用点到杠杆的轴线的距离。
在关节中,肌腱的拉力作用于骨头上的力可以分解成两个分力,一个垂直于骨头的力,称为正压力,一个与骨头平行的力,称为剪切力。
当正压力和剪切力的力矩平衡时,关节中的力就达到平衡状态。
在关节中,一般会存在两个骨头,分别被肌肉通过肌腱连接。
这时,肌腱的拉力就可以看作是作用于杠杆的力,骨头则是杠杆的杆。
通过调整肌腱拉力的大小和方向,可以使得关节中的力达到平衡状态。
例如,当我们举起物体时,肌肉的收缩产生力,通过肌腱作用于关节的骨头上,使得关节能够承受物体的重力。
此外,关节中的肌腱还可以改变力的方向。
根据杠杆原理,力的方向可以通过改变力臂的方向来实现。
在关节中,肌肉收缩产生的力作用于肌腱,然后通过肌腱传递给骨头。
通过改变肌腱的拉力方向,可以改变关节中力的方向。
例如,在我们举重时,肌肉的收缩力向上作用于肌腱,然后通过肌腱传递给骨头,从而使得骨头向上运动。
除了关节中的肌腱,关节中的其他组织也可以发挥杠杆作用。
例如,关节中的韧带可以连接两个骨头,并通过杠杆作用来保护关节。
当关节受到外力冲击时,韧带会发挥杠杆作用,减轻关节的负担,从而避免或减少关节损伤。
综上所述,杠杆原理在关节中起到了重要作用。
通过调整肌腱的拉力大小和方向,关节中的力可以达到平衡状态,并实现人体的运动。
此外,关节中的其他组织如韧带也可以发挥杠杆作用,保护关节免受损伤。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
右大腿抬起; 股四头肌松弛,股二头肌收缩,使右膝弯曲; 仰卧起坐时,上身受到腹肌和上身重力的作用。
3.走路时的脚——省力杠杆
我们走路抬起脚时,脚就是一个杠杆。脚掌根是支点,
人体的重力就是阻杆可以克服较大的体重。
除上述三个部位之外,在身体中还有多处杠杆: 小腿绕膝盖的转动可看成小腿肌肉和胫骨组成的杠杆; 弯腰时,腰部肌肉和脊骨之间形成杠杆; 奔跑时,向前跨步,右腿的髂腰肌收缩、臀大肌松弛,使
1.人的头颅——等臂杠杆
点一下头或抬一下头是靠杠杆的作用,杠杆的支点在脊柱
顶端,支点前后各有肌肉,头颅的重力是阻力。 支点前后的肌肉所用的力是动力。支点前后的肌肉配合起 来,有的收缩有的拉长形成低头仰头动作。
2.人的手臂——费力杠杆
人的手臂绕肘关节转动,可以看成是由肌肉和手臂骨骼组
成的杠杆在转动。肘关节是支点,肱二头肌肉所用的力是 动力,手拿的重物的重力是阻力。 显然我们的前臂是一种费力杠杆,举起一个重物,肌肉要 化费6倍以上的力气,但是可以省距离,提高工作效率。