机械设计基础齿轮系
机械设计基础第七章齿轮传动

§7-7 直齿圆锥齿轮传动的强度计
算 方向: Ft——主反从同
Fr——指向各自的轴线
一、直F齿a—圆—锥指齿向轮大传端 动的受力分析
Fr1 Fa2
Fa1 Fr 2
Ft1=-Ft2
二、强度计算
1、齿面接触强度的计算 2、齿根弯曲强度的计算
P120
§7-8 蜗杆传动强度计算
一、蜗杆传动的失效形式、设计准则及常用材料
2T1 d1
Fa2
பைடு நூலகம்Ft 2
2T2 d2
Fa1
Fr1 Fr2 Ft2tg
力的方向和蜗轮转向的判别
蜗轮转向的判别 : Fa1的反向即为蜗轮的角速度w2方向
圆周力
Ft——主反从 同
径向力
Fr——指向各自 的轴线
轴向力 Fa1——蜗杆左右
手螺旋定则
三、蜗杆传动强度计算
1、蜗轮齿面接触强度的计算 2、蜗轮齿根弯曲强度的计算
(2)铸钢 用于尺寸较大齿轮,需正火和退火以消除 铸造应力。 强度稍低 。
2、铸铁 脆、机械强度,抗冲击和耐磨性较差, 但抗胶合和点蚀能力较强,用于工作平 稳、低速和小功率场合。
常用铸铁:灰铸铁;球墨铸铁(有较好
的机械性能和耐磨性 )
3、非金属材料——工程塑料(ABS、尼 龙)、夹布胶木
适于高速、轻载和精度不高的传动中, 特点是噪音较低,无需润滑;
四、蜗杆传动热平衡计算
1、原因 效率低,发热大,温升高,润滑油粘度 下降润滑油在齿面间被稀释,加剧磨损 和胶合。
2、冷却措施 加散热片以增大散热面积;风扇;
冷却水管;循环油冷却
§7-9 齿轮、蜗杆和蜗轮的构造 一、结构
1、齿轮轴 2、实体式 3、辐板式(孔板式) 4、轮辐式 5、镶圈齿轮
机械设计基础 第4章 齿轮机构
b. 模数的意义 ◆ 模数的量纲 mm m=
p ,确定模数 m 实际上就是确定周节 p ,也就是确
p
定齿厚和齿槽宽e。模数m越大,周节p越大,齿厚s和齿槽 宽e也越大。 模数越大,轮齿的抗弯强度越大。
c. 确定模数的依据 根据轮齿的抗弯 强度选择齿轮的 模数
一组齿数相同,模数不同的齿轮。
(3)分度圆压力角(齿形角)
p 0.5p 0.5p ha=m m c
上各点具有相同的
压力角,即为其齿 形角,它等于齿轮
F V
分度圆压力角。
b. 与齿顶线平行的任一直线上具有相同的齿距p= p m。
c. 与齿顶线平行且齿厚s等于齿槽宽e的直线称为分度线,
它是计算齿条尺寸的基准线。
三、参数间的关系
表5-5渐开线标准直齿圆柱齿轮几何尺寸公式表 名 称
式
齿根圆直径
周 节 齿 厚 基圆周节 中心距
df
p s pb a
P= p m s= p m/2
Pb= p m cosa
a=m(z1 ±z2)/2
注:上面符号用于外齿轮或外啮合传动,下面符号用于内齿轮或内啮合传动。
一对标准齿轮:
1 1 a ( d 2 d 1 ) m ( z 2 z1 ) 2 2 ①m、z决定了分度圆的大小,而齿轮的大小主要
取决于分度圆,因此m、z是决定齿轮大小的主要
参数 * ha , ②轮齿的尺寸与 m,
c*
有关与z无关
③至于齿形, rb r cos
mz cos ,与m,z, 2
有关
可见,m影响到齿轮的各部分尺寸, ∴又把这种以模数为基础进行尺寸计算的齿轮称m制齿轮。 欧美:径节制 P
2024版《机械设计基础》第六章齿轮传动

安全系数
在强度计算中引入安全系数,以保证齿轮 在极端工况下仍能安全可靠地工作。
齿轮疲劳寿命预测方法
疲劳寿命概念
齿轮在循环载荷作用下,经过一定次 数的应力循环后发生疲劳破坏的寿命。
影响因素
齿轮的疲劳寿命受多种因素影响,如 材料性能、制造工艺、润滑条件和使 用环境等。
预测方法
基于疲劳累积损伤理论,结合齿轮的 受力分析和材料特性,采用试验或数 值模拟等方法预测齿轮的疲劳寿命。
确定合理的齿轮参数
包括模数、齿数、压力角、螺旋角等, 以满足传动比、承载能力和传动平稳 性等要求。
保证齿轮的精度和强度
通过合理的制造工艺和材料选择,确 保齿轮具有足够的精度和强度,以承 受传动过程中的载荷和冲击。
考虑润滑和冷却
为齿轮传动装置提供适当的润滑和冷 却,以减少磨损、降低温度和防止腐 蚀。
典型齿轮传动装置实例分析
齿轮热处理工艺选择及优化
退火
消除齿轮内部应力,降低硬度,便 于加工。
正火
提高齿轮硬度和强度,改善切削性 能。
淬火
使齿轮获得高硬度和高耐磨性,提 高齿轮使用寿命。
回火
消除淬火产生的内应力,稳定齿轮 尺寸,提高韧性。
齿轮制造工艺流程简介
01
02
齿轮毛坯加工
包括锻造、铸造、焊接等工艺, 获得齿轮的基本形状。
齿轮传动具有传动比准确、效率高、结构紧凑、工作可靠、寿命长等 优点。同时,齿轮传动也具有制造和安装精度要求高、成本较高等缺 点。
齿轮传动分类及应用
分类
根据齿轮的轴线相对位置,齿轮传动可分为平行轴齿轮传动、 相交轴齿轮传动和交错轴齿轮传动。根据齿轮的齿形,齿轮传 动又可分为直齿、斜齿、人字齿、圆弧齿等。
2024年机械设计基础课件齿轮传动

机械设计基础课件齿轮传动机械设计基础课件:齿轮传动1.引言齿轮传动是机械设计中的一种基本传动方式,广泛应用于各种机械设备的运动和动力传递。
齿轮传动具有结构简单、传动效率高、可靠性好、寿命长等优点,因此在工业生产和日常生活中得到广泛应用。
本课件将介绍齿轮传动的基本原理、分类、设计方法和应用。
2.齿轮传动的基本原理齿轮传动是利用齿轮副的啮合来传递动力和运动的一种传动方式。
齿轮副由两个或多个齿轮组成,其中主动齿轮通过旋转驱动从动齿轮,从而实现动力和运动的传递。
齿轮副的啮合是通过齿轮齿廓的接触来实现的,齿廓的形状和尺寸决定了齿轮传动的性能和精度。
3.齿轮传动的分类齿轮传动根据齿轮的形状和布置方式可分为直齿圆柱齿轮传动、斜齿圆柱齿轮传动、直齿圆锥齿轮传动和蜗轮蜗杆传动等。
直齿圆柱齿轮传动是应用最广泛的一种齿轮传动方式,具有结构简单、制造容易、精度高等优点。
斜齿圆柱齿轮传动具有传动平稳、噪声低、承载能力强等优点,适用于高速和重载的传动场合。
直齿圆锥齿轮传动适用于空间狭小和角度传动的场合。
蜗轮蜗杆传动具有大传动比、自锁性和精度高等特点,适用于低速、大扭矩的传动场合。
4.齿轮传动的设计方法齿轮传动的设计主要包括齿轮的几何设计、强度设计和精度设计。
齿轮的几何设计是根据传动比、工作条件、材料等因素确定齿轮的齿数、模数、压力角等参数。
强度设计是保证齿轮传动在规定的工作条件下具有足够的承载能力和寿命,主要包括齿面接触强度和齿根弯曲强度的计算。
精度设计是保证齿轮传动的精度和运动平稳性,主要包括齿轮的加工精度和装配精度的控制。
5.齿轮传动的应用齿轮传动在工业生产和日常生活中得到广泛应用。
在机床、汽车、船舶、飞机等机械设备中,齿轮传动用于传递动力和运动,实现各种复杂的运动轨迹和速度变化。
在风力发电、水力发电等能源领域,齿轮传动用于传递高速旋转的动力,实现能源的转换和利用。
在、自动化设备等高科技领域,齿轮传动用于实现精确的运动控制和动力传递,提高设备的性能和效率。
《机械设计基础》齿轮系

13.5 轮系的应用
若输入转速为n5,两车轮外径相等,轮距为2L,两轮转速分别为n1和n3, r为汽车行驶半径。当汽车绕图示P点向左转弯时,两轮行驶的距离不相等,其
转速比为:
n1 r L n3 r L
差速器中齿轮4、5组成定轴系,行星架H与齿轮4固联在一起,1-2-3-H
组成差动齿轮系。对于差动齿轮系1-2-3-H,因z1= z2= z3,有:
H 5
3 3'
13.4 复合轮系传动比计算
对于定轴轮系
i3'5
3' 5
z5 z3'
88 22
4
对于周转轮系
i1H3
1H 3H
1 H 3 H
(1)1
z2 z3 z1z2'
45100 6 30 25
联立各式,得
i15
1 5
31
i15 为正值,说明齿轮1与齿轮5(卷筒)转向相同。
根据齿轮系运转时各齿轮的轴
否则称为空间轮系。
线位置相对于机架是否固定,又可
将轮系分为以下三种类型:
一、定轴轮系
轮系运转时所有齿轮的 轴线保持固定的轮系,称为 定轴轮系。
13.1 轮系的分类
定轴轮系又分为平面定轴轮系和空间定轴轮系两种。
13.1 轮系的分类
二、周转轮系
在齿轮运转时,其中至少有一个齿轮的几何轴线绕另一齿轮的几何轴线 运动的齿轮系称为周转轮系。
z2 )
m 2
(z3
z2 )
13.2 定轴轮系传动比计算
因此: z1 z2 z3 z2
z3 z1 2z2 25 2 25 75
同理: z5 z3' 2z4 25 2 25 75
高职《机械设计基础》齿轮系作业含答案
第12章齿轮系传动。
已知轮1的转速n 1=1 000 r/min ,试求轮4的转速及转动方向。
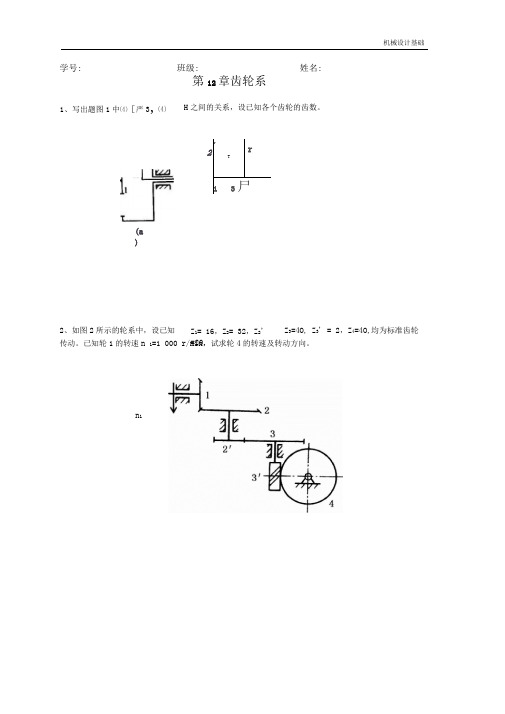
学号:班级: 姓名:1、写出题图1中⑷[严3,⑷H 之间的关系,设已知各个齿轮的齿数。
(a)rTr1 3尸22、如图2所示的轮系中,设已知Z 1= 16,Z 2= 32,Z 2'=20, Z 3=4O , Z 3' = 2,Z 4=4O ,均为标准齿轮 n 13.图3所示的轮系中,已知 z i =100,Z 2=101,Z 2' = 100,Z 3=99,均为标准齿轮传动。
试求i Hi。
4.图10-6所示的轮系中,已知 Z 1= 40, Z 2=40, Z 3= 40,均为标准齿轮传动。
试求I -H 13。
27100) 2(101)€1_H 1岡11# J 3\Z實1图45.在图5所示的齿轮系中, 已知 z i =20, Z 2= 40, Z 2'= 20, z 3= 30, Z 4=60,均为标准齿轮传动。
6.图6示为锥齿轮组成的周转轮系。
已知Z 1=Z 2=17,Z 2, =3O ,Z 3=45,若1轮转速n 1=200r/min , 试求系杆转速n H 。
-1 ・3t L_2 f■ !(1-2)T (2-3)T (3 -4)(2)传动比:(3)根据已知条件计算:n 4=n i /i= 1000/80=12.5 r/min轮4的转向如图所示应该逆时针转动。
(1_2)T (2,-3)因为:其■”号表示轮1与轮3在反转机构中的转向相反。
由图可知该轮系为一平行轴定轴轮系与简单行星轮系组成的组合轮系,其中 行星轮系:2’— 一 4- H1.解: (a )、・Hi13«1 -«3(b )、 ・Hi13牡一叭 =(-1)2(C )、・H113时1 -时32. 解: (1)传递路线为:Z 3乙Z 3乙乙'Z 3 乙Z 2齿轮系答案乙'定轴轮系: 1-2ijnZ 2 Z 3 Z 4 n 4Z i Z 2 Z 316x20x23. 解: (1)传递路线为:H.Hn 1 in 1 — ri H Z 2Z 3 Hn 3n 3 -n HZ 1 Z 2所以:n 1- nHZ 2Z 3 i 1H i H1-nHZ 1Z 2 n 1 n H n Hn 1i 1HZ 2Z 3=10000101 X 99 100X10010000・Hi13Hn 1 n 1 -n H Z 2 Z 3 Z 3 H n 3n 3 -n H乙Z 2Z 15.解:(1 )分析轮系(2)分析轮系中各轮之间的内在关系,由图中可知: n4=0. n2=n2' (3)分别计算各轮系传动比定轴齿轮系:由式(10-1 )得i i 2 亠(-2n2 Zi(1)n i =-2n2 行星齿轮系・HI24式(1 )、Z4Z3Hn4 “4 -n H Z3 Z2 *一60 —320(2) (2)联立求解联立(1 )、(2)式,代入n4=0, n2=n2 得n2 T H C=-3n1=-2n2所以i1H =n H -2n2n2=—86.解:(1 )•判定轮系类型,确定传动比计算式轮系类型一因在一轮系运转时,齿轮2和2'的轴线相对于机架的位置不固定,且齿轮固定不转动,故为行星轮系;传动比公式一系杆转速n H须通过行星轮系的转化轮系(假想定轴轮系)传动比公式求得。
2024年机械设计基础课件!齿轮机构H

机械设计基础课件!齿轮机构H机械设计基础课件:齿轮机构一、引言齿轮机构是机械设计中应用最广泛的一种传动机构,其结构简单、传动效率高、可靠性好,广泛应用于各种机械设备中。
齿轮机构由齿轮副组成,包括齿轮、轴、轴承等零部件。
本课件将介绍齿轮机构的基本原理、分类、传动比计算、齿轮啮合条件、齿轮强度计算等内容。
二、齿轮机构的基本原理齿轮机构是利用齿轮的啮合来实现两轴之间的运动和动力传递的装置。
当两个齿轮啮合时,主动齿轮转动,通过齿轮啮合将动力传递给从动齿轮,从而实现运动的传递。
齿轮的啮合原理是基于齿廓曲线的几何关系,齿廓曲线是齿轮啮合的基础。
三、齿轮机构的分类齿轮机构根据齿轮的形状和布置方式可以分为多种类型,常见的有直齿轮机构、斜齿轮机构、蜗轮蜗杆机构等。
1.直齿轮机构:直齿轮机构是齿轮齿面与轴线垂直的齿轮机构,其传动平稳、噪音低,但承载能力相对较小。
2.斜齿轮机构:斜齿轮机构是齿轮齿面与轴线呈一定角度的齿轮机构,其传动效率高、承载能力强,但噪音相对较大。
3.蜗轮蜗杆机构:蜗轮蜗杆机构是利用蜗杆和蜗轮的啮合来实现传动的,其传动比大、传动平稳,但效率相对较低。
四、齿轮机构的传动比计算齿轮机构的传动比是指主动齿轮与从动齿轮转速的比值。
传动比的计算公式为:传动比=从动齿轮齿数/主动齿轮齿数在实际应用中,根据工作需求确定传动比,然后根据传动比选择合适的齿轮齿数,以满足设计要求。
五、齿轮啮合条件1.齿廓重合条件:齿轮啮合时,齿廓必须保持连续接触,避免齿廓间的冲击和滑动。
2.齿顶隙条件:齿轮啮合时,齿顶之间应保持一定的间隙,以避免齿顶干涉。
3.齿根隙条件:齿轮啮合时,齿根之间应保持一定的间隙,以避免齿根干涉。
4.齿侧隙条件:齿轮啮合时,齿侧之间应保持一定的间隙,以允许润滑油的进入和排出。
六、齿轮强度计算齿轮强度计算是齿轮设计的重要环节,主要包括齿面接触强度计算和齿根弯曲强度计算。
1.齿面接触强度计算:齿面接触强度计算是确定齿轮齿面接触应力是否满足材料屈服极限的要求。
《机械设计基础》第8章 齿轮系
48 24 4 48 18 3
250 H 4 100 H 3
H 2
2
1
2‘ H
3
3H
3
1
H 1
H 50
周转轮系传动比计算方法小结:
定轴齿轮系
平面定轴齿轮系 空间定轴齿轮系
二.行星齿轮系
1. 定义
在齿轮系运转时,若至少有一个齿轮的几何轴线 绕另一齿轮固定几何轴线转动,则该齿轮系称为行星 齿轮系(如图8-3)。它主要由行星齿轮、行星架(系 杆)、和中心轮所组成。
2. 基本构件
行星齿轮系中由于一般都以中心轮和行星架作 为运动的输入或输出构件,故称它们为行星齿轮系 的基本构件
上角标 H
周转轮系
-w
H
正负号问题
转化机构:假想的定轴轮系
i1H n 1 n H i1n
计算转化机构的传动比 计算周转轮系传动比
1H z 2 z n i H z1 z n1 n
H 1n
i1 n 1
n
例题8-2 :
一差动齿轮系如图 所示,已知个轮齿数为: z1 16, z 2 24, z3 64, 当轮1和轮3的转速为:
式中:G为主动轮,K为从动轮,中间各轮的主 从地位也应按此假定判定。m为齿轮G至K间外啮合 的次数。
求行星齿轮系传动比时,必须注意以下几点:
(1) nG , K ,nH 必须是轴线平行或重合的相应齿轮的 n 转速。 (2)将nG,nK,nH 的已知值代入公式时必须带正 号或负号。
H (3) i GK i GK。 i GK为转化机构中轮G与K的转速之 比,其大小与正负号应按定轴齿轮系传动比的计算 方法确定。
《机械设计基础》 项目8 齿轮系传动承载能力分析与设计 例8-1
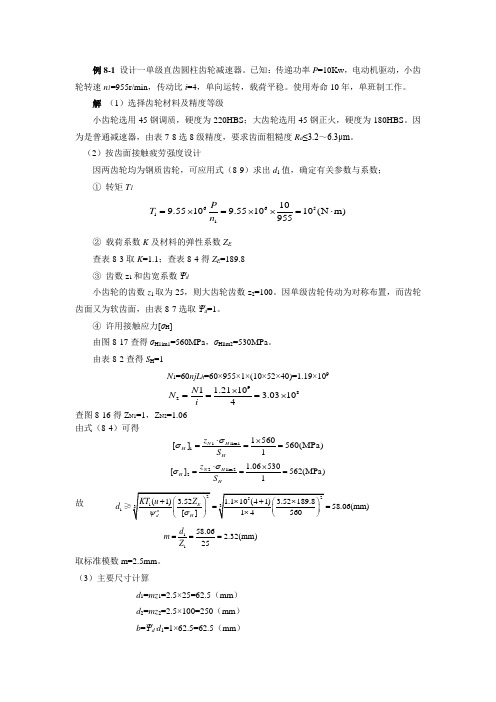
例8-1 设计一单级直齿圆柱齿轮减速器。
已知:传递功率P =10Kw ,电动机驱动,小齿轮转速n 1=955r/min ,传动比i =4,单向运转,载荷平稳。
使用寿命10年,单班制工作。
解 (1)选择齿轮材料及精度等级小齿轮选用45钢调质,硬度为220HBS ;大齿轮选用45钢正火,硬度为180HBS 。
因为是普通减速器,由表7-8选8级精度,要求齿面粗糙度R a ≤3.2~6.3μm 。
(2)按齿面接触疲劳强度设计因两齿轮均为钢质齿轮,可应用式(8-9)求出d 1值,确定有关参数与系数; ① 转矩T 166511109.55109.551010(N m)955P T n =⨯=⨯⨯=⋅ ② 载荷系数K 及材料的弹性系数Z E查表8-3取K =1.1;查表8-4得Z E =189.8③ 齿数z 1和齿宽系数Ψd小齿轮的齿数z 1取为25,则大齿轮齿数z 2=100。
因单级齿轮传动为对称布置,而齿轮齿面又为软齿面,由表8-7选取Ψd =1。
④ 许用接触应力[σH ]由图8-17查得σH1im1=560MPa ,σHlim2=530MPa 。
由表8-2查得S H =1N 1=60njL h =60×955×1×(10×52×40)=1.19×1099821 1.2110 3.03104N N i ⨯===⨯ 查图8-16得Z N1=1,Z N2=1.06由式(8-4)可得1lim111560[]560(MPa)1N H H H z S σσ⋅⨯=== 2lim22 1.06530[]562(MPa)1N H H H z S σσ⋅⨯=== 故158.06(mm)d 1158.06 2.32(mm)25d m Z === 取标准模数m=2.5mm 。
(3)主要尺寸计算d 1=mz 1=2.5×25=62.5(mm )d 2=mz 2=2.5×100=250(mm )b =Ψd˙d 1=1×62.5=62.5(mm )经圆整后取 b 2=65mm ;b 1=b 2+5=70(mm )a=21m (z 1+z 2)=21×2.5×(25+100)=156.25(mm ) 按齿根弯曲疲劳强度校核由式(8-10)求出σF ,如σF ≤[σF ],则校核合格。
《机械设计基础》课件 第11章 齿轮传动
H
2
bd1
u
Zβ cos
32
§11-8 斜齿圆柱齿轮传动
2 KT1
F
YFaYSa F
bd1mn
2 KT1 YFaYSa
2
mn 3
cos
2
d z1 F
z
zv
3
cos
33
§11-9 直齿圆锥齿轮传动
34
§11-9 直齿圆锥齿轮传动
35
轴向力:
Fa Ft tan
29
§11-8 斜齿圆柱齿轮传动
力的方向:
圆周力t :主动轮与运动方向相反,
从动轮与运动方向相同
径向力r :两轮都是指向各自的轴心
轴向力a :主动轮的左(右)手法则
30
根据主动轮轮齿的齿向(左旋或右旋)伸左手或右手,四指
沿着主动轮的转向握住轴线,大拇指所指即为主动轮所受的
轮齿会变形,需要磨齿。
二、主要参数
1. 齿数比:一般≤7,同要求的传动比误差≤ (3~5)%
2. 齿数:一般z1>17
3. 齿宽:过大,宽度方向载荷分布不均匀
28
§11-8 斜齿圆柱齿轮传动
一、轮齿上的作用力
轮齿所受总法向力
可分解为:
2T1
圆周力:Ft
d1
Ft tan n
径向力:Fr
cos
开式传动的主要失效形式为齿面磨粒磨损和轮齿的弯曲疲劳
折断。
由于目前齿面磨粒磨损尚无完善的计算方法,因此通常只对
其进行抗弯曲疲劳强度计算,并采用适当加大(10%~20%)
模数(或降低许用弯曲应力)的方法来考虑磨粒磨损。
机械设计基础课件齿轮机构H

垂直轴传动
蜗杆蜗轮机构主要用于垂直轴之间的传动,具有 较大的传动比和自锁功能。
螺旋齿形
蜗杆和蜗轮的齿形为螺旋形,可实现连续、平稳 的传动。
高效率与低噪音
蜗杆蜗轮机构传动效率高,噪音低,适用于各种 高精度、低噪音要求的场合。
2024/1/26
18
其他特殊类型齿轮机构
2024/1/26
非圆齿轮机构
非圆齿轮机构可实现变传动比传动,满足某些特殊机械装置的需 求。
2024/1/26
工业革命时期
随着工业革命的兴起,金属加工技 术的进步促进了齿轮机构的快速发 展,出现了各种高精度、高效率的 齿轮传动装置。
现代时期
随着计算机技术和先进制造技术的 不断发展,现代齿轮机构设计更加 精确、制造更加精细,应用领域也 更加广泛。
6
02
齿轮机构基本原理
2024/1/26
7
齿轮传动比计算
10
03
齿轮机构设计方法与步骤
2024/1/26
11
设计目标确定与参数选择
确定设计目标
明确齿轮机构的使用场合、传递 功率、转速等要求。
选择齿轮参数
根据设计目标,选择合适的齿轮 模数、齿数、压力角等参数。
确定齿轮精度等级
根据使用要求和制造成本,选择 合适的齿轮精度等级。
2024/1/26
12
齿轮类型选择及优缺点比较
啮合特点
齿轮传动具有恒定的传动 比,且传动平稳、噪音小 、效率高。
9
齿轮受力分析及强度计算
受力分析
根据齿轮的啮合原理,分 析齿轮受到的径向力、圆 周力和轴向力。
2024/1/26
强度计算
根据齿轮的受力情况,进 行齿面接触强度和齿根弯 曲强度计算。
高职《机械设计基础》齿轮系、教案

****职业技术学院教案第23 次课教学课型:理论课√实验课□习题课□实践课□技能课□其它□主要教学内容第12章齿轮系12.1 轮系及类型12.2 定轴轮系传动比的计算12.3 行星轮系传动比的计算重点、难点定轴轮系传动比的计算教学目的要求:1. 轮系的基本类型2. 定轴轮系传动比的计算教学方法和教学手段:多媒体讲授讨论、思考题、作业:1.定轴齿轮系与行星齿轮系的主要区别是什么?2.各种类型齿轮系的转向如何确定?(-1)m方法适用于何种类型的齿轮系参考资料:多媒体材料,网络资料讲 稿 内 容备注 第12章 齿轮系12.1 轮系及其类型在实际的机械工程中,为了满足各种不同的工作需要,仅仅使用一对齿轮是不够的。
例如,在各种机床中,为了将电动机的一种转速变为主轴的多级转速;在机械式钟表中,为了使时针、分针、秒针之间的转速具有确定的比例关系;在汽车的传动系中等,都是依靠一系列的彼此相互啮合的齿轮所组成的齿轮机构来实现的。
这种由一系列的齿轮所组成的传动系统称为齿轮系,简称轮系在工程上,我们根据轮系中各齿轮轴线在空间的位置是否固定,将轮系分为两大类:定轴轮系和行星轮系。
如图12-1和12-2所示。
十分明显,所有齿轮轴线相对于机架都是固定不动的轮系称为定轴轮系,定轴轮系也称作普通轮系;反之,只要有一个齿轮的轴线是绕其它齿轮的轴线转动的轮系即为行星轮系。
如果在轮系中,兼有定轴轮系和周转轮系两个部分,则称作混合轮系。
轮系可以由各种类型的齿轮所组成——圆柱齿轮、圆锥齿轮、蜗轮蜗杆等组成。
本章仅从运动分析的角度研究轮系设计,即只讨论轮系的传动比计算方法和轮系在机械传动中的作用。
行星轮系的组成图12-2所示,在周转轮系中,一般都以太阳轮或行星架作为运动的输入和输出构件,所以它们就是周转轮系的基本构件。
OO 轴线称作主轴线。
由上可以看出,一个基本周转轮系必须具有一个行星架、具有一个或若干个行星轮以及与行星轮啮合的太阳轮。
机械设计基础课件第7章齿轮系与减速器

自由度F=1
简单行星轮系
自由度F=2
差动轮系
行星轮系动画演示(3D)
行星轮系动画
行星轮系动画演示(3D)
3.混合轮系 轮系中既含有定轴轮系又含有行星轮系的复杂轮系。 或含有两个以上的基本行星轮系的复杂轮系。
混合轮系动画演示(3D)
7.2
定轴轮系传动比及其计算
所谓轮系的传动比,是指轮系中输入轴A的角速度(或转速) 与输出轴B的角速度(或转速)之比,即 a na iab b nb 计算轮系传动比时,既要确定传动比的大小,又要确定首 末两构件的转向关系。 一、传动比大小的计算 1 n1 z2 定义 i 2 n2 z1
i16 n1 z2 z4 z6 42 31 38 34.64 n6 z1 z3 z5 34 21 2
故蜗轮的转速为
n1 1 n6 940 27.14 r min i16 34.64
蜗轮的转向用画箭头的方式决定,如图所示。
车床变速箱动画
7.3
行星轮系传动比及其计算
定轴轮系与行星轮系比较。 显然,不能将定轴轮系传动比的计算公式直接用于行星轮系 一、行星轮系的转化轮系 根据相对运动原理,若给整个轮系加上一个公共的角速度 -ωH ,各构件之间的相对运动关系并不改变,但此时系杆H静止 不动。于是周转轮系就转化为一假想的定轴轮系—转化轮系。 -ωH
行星轮系
转化轮系
行星轮系动画
H3 3 H
H H H H 0
二、行星轮系传动比的计算
转化轮系中1、3两轮的传动比 可以根据定轴轮系传动比的计算方 法得出 H 1H 1 H z i13 H 3 3 3 H z1 推广到一般情况,可得:
H iGK
机械设计基础第十一章 齿轮传动

Ft1 = 2T1
d1
Fr1 = Ft1tan
Fn1
Ft1
cos
小齿轮上的转矩:
O2
T1
106
P
1
9.55 106
P n1
N mm
P为传递的功率(KW)
t
ω1----小齿轮上的角速度,
d1----小齿轮上的分度圆直径, N1
n1----小齿轮上的转速
α----压力角
α
ω2
(从动)
标准直齿圆柱齿轮几何尺寸的计算
分度, 取标准值 ha*=1
齿根高:hf=(ha* +c*)m ca* ——顶隙系数, 取标准值 c*=0.25
ha s N e h hf
pn pb
rb
rf r ra
α
全齿高:h= ha+hf =(2ha* +c*)m
合金结构钢 铸钢 灰铸铁
球墨铸铁
表13-1
牌号
35
45
50 40Cr
35SiMn 40MnB
…… ZG270-500
…… HT200 …… QT500-5 ……
常用的齿轮材料
热处理
正火 调质 表面淬火 正火 调质 表面淬火 正火 调质 表面淬火 调质 表面淬火 调质 ……
正火
……
硬度(HBS或HRC)
1.2~1.6
1.6~1.8
1.6~1.8
1.8~2.0
(
Fn b
)min
大的冲击 1.6~1.8 1.9~2.1 2.2~2.4
§11-5 直齿圆柱齿轮传动的 齿面接触强度计算
齿轮强度计算的主要目的是避免失效。 闭式齿轮传动的主要失效形式是齿面点蚀 和齿根弯曲疲劳折断。 开式齿轮传动的主要失效形式是齿面磨损 和齿根弯曲疲劳折断。
机械设计基础 第十一章

11.2.3 惰轮
如图11-7所示的定轴齿轮系中,运动由齿轮1经齿 轮2传给齿轮3。总的传动比为:
i13
n1 n3
z2 z3 z1z2
z3 z1
图11-7 惰轮的应用
【例11-1】如图11-2所示空间定轴轮系,蜗杆的头数 z1 2, 右旋;蜗轮的齿数z2 60,z2 20,z3 24,z3 20,z4 24, z4 30,z5 35,z5 28,z6 135 。若蜗杆为主动轮,其转速 n1 900 r / min ,试求齿轮 6 的转速n6 的大小和转向(用画箭头
14.8
r
/
min
负号表示末轮5的转向与首轮1相反,顺时针转动。
11.3 行星齿轮系的传动比计算
行星齿轮系传动比的计算方法有许多种,最常用的是转化 机构法,即设想将周转轮系转化为假想的定轴轮系,借用定 轴轮系传动比计算公式来求解周转轮系中有关构件的转速及 传动比。
如图11-8所示,现假想给行星齿轮系加一个与行星架
相同。
iH1
nH n1
600 120
5
11.4 混合齿轮系的传动比计算
既包含定轴齿轮系又包含行星齿轮系的齿轮系,称为混 合齿轮系,如图11-10所示。
图11-10 混合齿轮系
计算混合齿轮系传动比的一般步骤如下:
① 区分轮系中的定轴齿轮系部分和行星齿轮系部分。 ② 分别列出定轴齿轮系部分和行星齿轮系部分的传动比公式, 并代入已知数据。 ③ 找出定轴齿轮系部分与行星齿轮系部分之间的运动关系,并 联立求解即可求出混合轮系中两轮之间的传动比。
传动比 iGHK 也不等于绝对传动比 iGK 。
【例11-3】在图11-8(a) 所示的差动齿轮系中,已知n1 100 r / min n3 60 r / min,n1与 n3 转向相同;齿数z1 17,z2 29,z3 75
机械设计基础第11章齿轮传动(六-2)

2T1 dm1
F F tg ' t
Ft的方向在主动轮上与运动方向 相反,在从动论上与运动方向相
同;
径向力:Fr1 F'cos 1 Ft tg cos 1
径向力指向各自的轴心;
轴向力:Fa Ft tg sin
F’
Fr
δ Fr δ
轴向力Fa的方向对两个齿轮都是背着锥顶。
当δ 1+δ 2 = 90˚ 时,有: sinδ 1=cosδ 2
YFaYSa
[ F ]
mm
MPa
§11-10 齿轮的构造
一、概述 由强度计算只能确定齿轮的主要参数:
如齿数z、模数m、齿宽B、螺旋角、分度圆直径d 等。
其它尺寸由结构设计确定
齿轮结构设计的内容: 主要是确定轮缘,轮辐,轮毂等结构形式及尺寸大小。
Ft tan n cos
Fr
Fn
c α F n
F β a
潘存云教授研制
t
长方体对角面即轮齿法面
Fr
潘存云教授研制
β
Fn αn
F’
潘存云教授研制
T1 F’ ω1
Ft Fr = F’ tanαn
β
d1
Fa
F’ 长方体底面
2
F’=Ft /cosβ
方向判断:
Ft、Fr 方向判断均同直齿圆柱齿轮 Ft:主动轮上与转向相反,从动轮上与转向相同。 Fr:均由作用点指向各自轮心。
dm2 d dm是平均分度圆直径
2
R =0.25 ~ 0.3
当量齿轮分度圆直径:
Re
rv1
dm1
2 cos 1
rv 2
dm2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
iab
a b
na nb
角标a和b分别表示输入和输出
轮系的传动比计算,包括计算其传动比 的大小和确定输出轴的转向两个内容。
第一节 定轴轮系的传动比
一、传动比大小的计算
i12
n1 n2
z2, z1
i2/3
n2/ n3
z3 z2/
n z n z i n z i n z 34
3
4
4,
3
4/5
4/
5
空间轮系 齿轮系中各齿轮的轴线不互相平行。
2.按轮系运转时齿轮的轴线位置相对于 机架是否固定可分为:
定轴轮系 各齿轮的几何轴线位置保持固定的轮系。
齿轮系运转时,至少有一个齿轮的几何轴
行星轮系 线绕另一齿轮的几何轴线回转的轮系 。 混合轮系 既含有定轴轮系又含有行星轮系,或包含有
几个基本周转轮系的复杂轮系。
5
4/
则
n n n n z z z z i i i i n n n n z z z z 12
2/3
3/4
45
/
1 2/ 3 4 n1
n 2 3 4 5
5
2345 /
2 1 / 3 4
n n /
2
2
n n /
4
4
n z z z z 1 i i i i i 15 n z z z z 5
(1)求传动比i17和i1 10
i17
n1 n7
z2 z4 z5 z7 z1 z3 z4 z6
25 20 14 30 15 14 20 20
2.5
i110
n1 n10
z2 z4 z5 z7 z8 z10 z1 z3 z4 z6 z7 z9
25 20 14 30 40 60 15 14 20 20 30 2
100
(2)求n7和n10
【例】 图所示空间定轴轮系中,已知各轮的齿数为z1=15,z2=25,z3=14,z4=20, z5=14,z6=20,z7=30,z8=40,z9=2(右旋),z10=60。试求:(1)传动比i17和i1 10; (2)若n1=200 r/min,从A向看去,齿轮1顺时针转动,求n7和n10。
解: 该轮系啮合关系线图为 z1—z2═ z3—z4—z5 ═ z6—z7—z8 ═ z9—z10
二、齿轮简图符号 齿轮简图符号
三、啮合关系线图
啮合关系线图对分析轮系很有帮助。在线图中,通常用“—”表 示两轮相啮合,用“…”将行星轮与行星架H相连,“=”表示两 零件是同一构件。
啮合关系线图为 : 1—2=2′—3—4=4′—5
啮合关系线图为 : 1—2—3
··· H
四、齿轮系的传动比
轮系的传动比:是指轮系中输入轴(主动轮)的角速 度(或转速)与输出轴(从动轮)的角速度(或转速) 之比,即 :
12
2/3
3/4
45
2345 /
2 1 / 3 4
上式表明:定轴轮系传动比的 大小等于组成该轮系的各对啮合 齿轮传动比的连乘积,也等于各 对啮合齿轮中所有从动轮齿数的 连乘积与所有主动轮齿数的连乘 积之比 。
推广:设轮1为起始主动轮,轮N为输出从动轮,则定轴
轮系的传动比的一般公式为 :
in1Biblioteka nN∴ 平面定轴齿轮系传动比计算式为:
i
n1 nN
(1)m
轮1至轮N所有从动轮齿数的连乘 轮1至轮N所有主动轮齿数的连乘
积 积
惰轮:不影响传动比大小,只起改变从动轮转向作用的齿轮。
【例】 如图所示为一汽车变速箱,主动轴Ⅰ的转速 nⅠ=1000r/min,当两半离合器x、y接合时,Ⅰ轴直接 驱动从动轴Ⅲ,此时为高速前进;两半离合器脱开,滑 移齿轮4与齿轮3啮合时为中速前进;滑移齿轮6与齿轮 5啮合时为低速前进;滑移齿轮6与齿轮8啮合时为倒车。 已知各轮齿数为z1=19,z2=38,z3=31,z4=26,z5=21, z6=36,z7=14,z8=12。试求从动轴Ⅲ 的四种转速。
第十一章 齿轮系
在机械和仪表中,仅用一对齿轮传动往往不能满足 实际工作要求,例如要得到较大的传动比、变速、变 向及回转运动的合成或分解等。因此,通常用一系列 齿轮组合在一起来进行传动。这种由一系列齿轮组成 的传动系统称为齿轮系(简称轮系)。
本章主要讨论轮系的类型、传动比计算及轮系的功用。
一、齿轮系的类型 1.按各齿轮(或构件)的轴线是否相互平行可分为: 平面轮系 齿轮系中各齿轮的轴线互相平行 。
i16
24
4.倒车时,移齿轮6与齿轮8啮合,其啮合关
系线图为 Ⅰ ═ z1—z2 ═ z7—z8—z6 ═ Ⅲ
n 1
i16 n6
1 3 z2 z8 z6 3836 36 z1 z7 z8 1914 7
故 nⅢ= n6
nⅢ= n6=
n1 1000 7 194
i16
36
r/min
.低速前进 倒车
n1 1000 31 596
i14
52
r/min
中速前进
3.低速前进时,滑移齿轮6与齿轮5啮合,其啮合 关系线图为 Ⅰ ═ z1—z2 ═ z5—z6 ═ Ⅲ
故 nⅢ= n6
i16
n1 n6
12
z2 z6 z1 z5
38 36 19 21
24 7
nⅢ= n6=
n1 1000 7 292 r/min
一对蜗轮蜗杆传动,用左右手螺旋定则。
圆锥齿轮传动
例:
2.公式法 (只适合平面定轴轮系)
对于平面定轴轮系,各轮的转向不相同则相反。
传动比正负号规定:两轮转向相同(内啮合) 时传动比取正号, 两轮转向相反(外啮合)时传动比取负号,轮系中从动轮与主动轮 的转向关系,可根据其传动比的正负号确定。外啮合次数m为偶 数(奇数)时,轮系的传动比为正(负),进而可确定从动件 的转向。
解 :1. 高速前进时,两半离合器x、y接合,nⅢ= nⅠ=1000r/min。
2.中速前进时,滑移齿轮4与齿轮3啮合时,其啮 合关系线图为
Ⅰ ═ z1—z2 ═ z3—z4 ═ Ⅲ
故 nⅢ= n4,nⅠ= n1
i14
n1 n4
12
z2 z4 z1 z3
38 26 19 31
52 31
nⅢ= n4=
轮1至轮N间所有从动轮齿数的连 轮1至轮N间所有主动轮齿数的连
乘积 乘积
二、输出轮转向的确定
1.箭头法 (适合各种定轴轮系)
箭头方向:表示可见侧的速度方向
一对外啮合圆柱齿轮传动:两轮转向相反,箭头反向; 外啮合圆柱 齿轮传动
一对内啮合圆柱齿轮传动,两轮转向相同,箭头同向;
内啮合圆柱 齿轮传动
一对圆锥齿轮传动, 两轮节点处速度方向同向,箭头相背或相向;