现代控制理论基础实验 (2)
现代控制理论基础实验
现代控制理论基础实验一、 实验目的1. 熟悉MATLAB 的编程以及SIMULINK 仿真工具的使用。
2. 通过实验掌握极点配置及设计状态反馈控制器K 的方法。
3. 深入了解电动机速度控制系统的综合控制方法。
二、 实验内容电动机速度控制系统,设计状态反馈控制器K ,使得系统跟踪单位阶跃指令时无静态误差,超调量s t s 1%,5%<≤σ。
要求写出详细的设计步骤,给出仿真设计系统原理框图,给出仿真的输出波形图和误差波形图。
三、 实验原理控制系统最基本的结构形式是由受控系统和实现反馈控制规律的反馈环节所构成的反馈控制系统。
现代控制理论中,存在两种基本的反馈形式,即状态反馈和输出反馈。
实际情况中,状态反馈具有更好的特性和适应性。
系统动力学的各种特性或各种品质指标,在很大程度上是由系统的极点决定的。
所谓极点配置问题,就是通过状态反馈矩阵K 的选择,使闭环系统的极点,恰好处于所希望的位置。
从线性定常系统运动分析可知,如时域中超调量、过渡过程时间及频域中增益稳定裕度、相位稳定裕度,都被认为等价于系统极点位置,相应综合问题可视为极点配置问题。
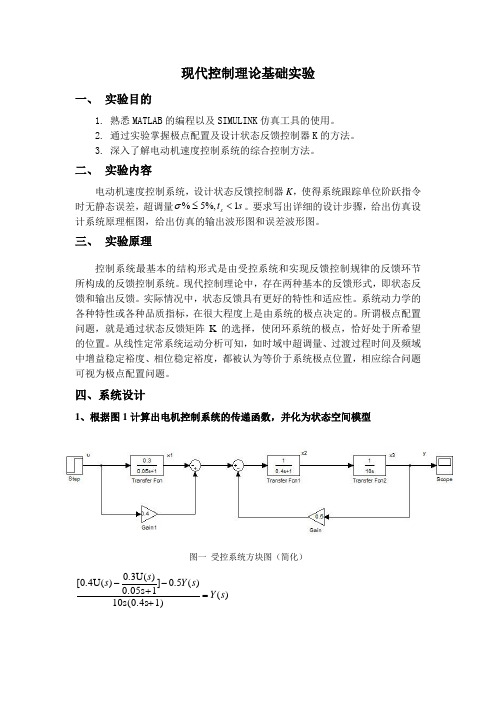
四、系统设计1、根据图1计算出电机控制系统的传递函数,并化为状态空间模型图一 受控系统方块图(简化))(1)10s(0.4s )(5.0]10.05s )(U 3.0)(U 4.0[s Y s Y s s =+-+-可求得受控系统的传递函数:5.2125.502^5.223^5.01.0)()()(++++==s s s s s U s Y s G 系统有一个零点z 1 = -5;用求根函数roots()计算函数极点 >> C=[1 22.5 50.125 2.5];>> roots(C) ans =-20.0000 -2.4490 -0.0510由题意设状态分别为:系统simulink 仿结构如下图二 受控系统simulink 仿真结构图⎪⎪⎪⎩⎪⎪⎪⎨⎧=+--=+=233121*10114.01*]*5.0)4.0[(1005.03.0x s x s x x u x u s x 化为标准形式可得:⎪⎪⎪⎭⎫ ⎝⎛'3'2'1x x x =⎪⎪⎪⎭⎫ ⎝⎛----01.0025.15.25.20020⎪⎪⎪⎭⎫ ⎝⎛321x x x +⎪⎪⎪⎭⎫ ⎝⎛016y=()100 x系统的性能指标:调节时间t s = 76.6s ,上升时间t r = 42.8s ,超调量0%=σ2、确定希望的极点希望的极点数为3,由系统要求超调量低于5%,ts 小于1秒选其中一对为主导极点1s 和2s ,另一个为远极点,并且认为系统的性能主要是由主导极点决定的,远极点所产生的影响很小,可以忽略不计。
现代控制理论实训报告

一、前言随着科技的飞速发展,自动化、智能化已成为现代工业生产的重要特征。
为了更好地掌握现代控制理论,提高自己的实践能力,我参加了现代控制理论实训课程。
本次实训以状态空间法为基础,研究多输入-多输出、时变、非线性一类控制系统的分析与设计问题。
通过本次实训,我对现代控制理论有了更深入的了解,以下是对本次实训的总结。
二、实训目的1. 巩固现代控制理论基础知识,提高对控制系统的分析、设计和调试能力。
2. 熟悉现代控制理论在工程中的应用,培养解决实际问题的能力。
3. 提高团队合作意识,锻炼动手能力和沟通能力。
三、实训内容1. 状态空间法的基本概念:状态空间法是现代控制理论的核心内容,通过建立状态方程和输出方程,描述系统的动态特性。
2. 状态空间法的基本方法:包括状态空间方程的建立、状态转移矩阵的求解、可控性和可观测性分析、状态反馈和观测器设计等。
3. 控制系统的仿真与实现:利用MATLAB等仿真软件,对所设计的控制系统进行仿真,验证其性能。
4. 实际控制系统的分析:分析实际控制系统中的控制对象、控制器和被控量,设计合适的控制策略。
四、实训过程1. 理论学习:首先,我对现代控制理论的相关知识进行了复习,包括状态空间法、线性系统、非线性系统等。
2. 实验准备:根据实训要求,我选择了合适的实验设备和软件,包括MATLAB、控制系统实验箱等。
3. 实验操作:在实验过程中,我按照以下步骤进行操作:(1)根据实验要求,建立控制系统的状态空间方程。
(2)求解状态转移矩阵,并进行可控性和可观测性分析。
(3)设计状态反馈和观测器,优化控制系统性能。
(4)利用MATLAB进行仿真,观察控制系统动态特性。
(5)根据仿真结果,调整控制器参数,提高控制系统性能。
4. 结果分析:通过对仿真结果的分析,我对所设计的控制系统进行了评估,并总结经验教训。
五、实训成果1. 掌握了现代控制理论的基本概念和方法。
2. 提高了控制系统分析与设计能力,能够独立完成实际控制系统的设计。
现代控制理论实验指导书

1.7 MATLAB 在系统数学模型中的应用MATLAB 是美国MathWorks 公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MA TLAB 和Simulink 两大部分。
通过使用MATLAB 可以更方便地对控制系统进行学习探讨和研究。
本节主要介绍MA TLAB 在线性定常系统数学模型的建立和分析中的应用。
1.7.1 线性系统的数学模型1. 传递函数模型设单输入单输出连续系统的传递函数为:111211011()n m n nn n n nb s b s b s b G s a s a s a s a -----++++=++++ 在MA TLAB 中,可用传递函数分子、分母多项式按s 的降幂系数排列的行向量,即:[][]121011,,,,;,,,,;n n n n num b b b b den a a a a --==MTALAB 中,可调用tf()函数建立系统的传递函数模型TF :(),;sys tf num den =[例1-25] 已知系统的传递函数为:23231()246s s G s s s s ++=+++试用MATLAB 描述其系统模型。
解:MATLAB 代码如下:运行结果如下:类似的,对于单输入单输出离散系统的脉冲传递函数为:111211011()n m n nn n n nb z b z b z b G z a z a z a z a -----++++=++++在MA TLAB 中,同样可调用tf()函数建立系统的传递函数模型TF :[][]()121011,,,,;,,,,;,,n n n n num b b b b den a a a a sys tf num den T --=== 式中,T 为系统采样周期。
另外,系统的传递函数还可以表示为零极点的形式:1212()()()()()()()m n s z s z s z G s ks p s p s p ---=---其调用格式为:[][]1212,,,;,,,;;(,,)m n z z z p p p k k sys zpk k ====z p z p2. 状态空间模型m 维输入、r 维输出的线性定常系统的状态空间表达式为()()()()()()t t t t t t =+⎧⎨=+⎩xAx Bu y Cx Du式中,nR ∈x ——系统的n 维状态向量;n R ∈u ——系统的r 维输入向量;R m ∈y ——系统的m 维输出向量;Rn n⨯∈A ——n n ⨯维系统矩阵;n r R ⨯∈B ——n r ⨯维输入矩阵; m n R ⨯∈C ——m n ⨯维输出矩阵;m r R ⨯∈D ——m r ⨯维输入输出关联矩阵;在MA TLAB 中,可调用ss()函数建立系统的状态空间模型:[][][][]111212122212111212122212111212122212111212122212,,,;,,,;;,,,;,,,;,,,;;,,,;,,,;,,,;;,,,;,,,;,,,;;,,,;(,,,)n n n n nn n n n n nn n n n n nn n n n n nn a a a a a a a a a b b b b b b b b b c c c c c c c c c d d d d d d d d d sys ss =====A B C D A B C D对于线性定常离散系统:(1)()()()()()k k k k k k +=+⎧⎨=+⎩x Gx Hu y Cx Du 在建立系数矩阵G 、H 、C 、D 后,同样可以调用ss()函数建立系统的状态空间模型:(,,,,)sys ss T =G H C D式中,T 为系统采样周期。
现代控制理论基础实验指导书200
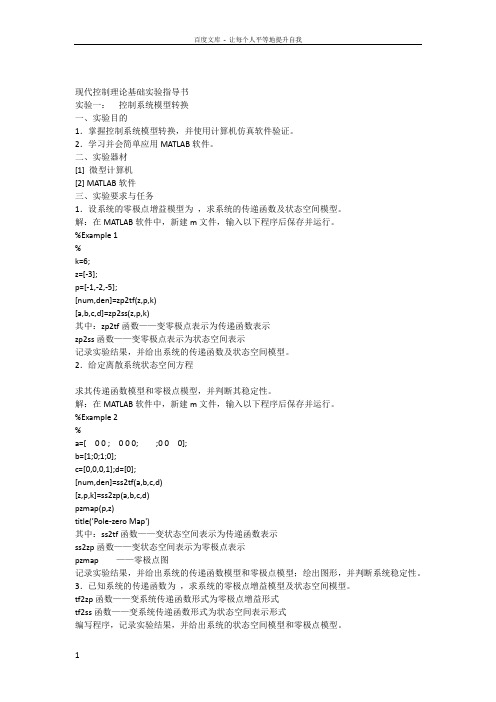
现代控制理论基础实验指导书实验一:控制系统模型转换一、实验目的1.掌握控制系统模型转换,并使用计算机仿真软件验证。
2.学习并会简单应用MATLAB软件。
二、实验器材[1] 微型计算机[2] MATLAB软件三、实验要求与任务1.设系统的零极点增益模型为,求系统的传递函数及状态空间模型。
解:在MATLAB软件中,新建m文件,输入以下程序后保存并运行。
%Example 1%k=6;z=[-3];p=[-1,-2,-5];[num,den]=zp2tf(z,p,k)[a,b,c,d]=zp2ss(z,p,k)其中:zp2tf函数——变零极点表示为传递函数表示zp2ss函数——变零极点表示为状态空间表示记录实验结果,并给出系统的传递函数及状态空间模型。
2.给定离散系统状态空间方程求其传递函数模型和零极点模型,并判断其稳定性。
解:在MATLAB软件中,新建m文件,输入以下程序后保存并运行。
%Example 2%a=[ 0 0 ; 0 0 0; ;0 0 0];b=[1;0;1;0];c=[0,0,0,1];d=[0];[num,den]=ss2tf(a,b,c,d)[z,p,k]=ss2zp(a,b,c,d)pzmap(p,z)title('Pole-zero Map')其中:ss2tf函数——变状态空间表示为传递函数表示ss2zp函数——变状态空间表示为零极点表示pzmap ——零极点图记录实验结果,并给出系统的传递函数模型和零极点模型;绘出图形,并判断系统稳定性。
3.已知系统的传递函数为,求系统的零极点增益模型及状态空间模型。
tf2zp函数——变系统传递函数形式为零极点增益形式tf2ss函数——变系统传递函数形式为状态空间表示形式编写程序,记录实验结果,并给出系统的状态空间模型和零极点模型。
4.已知系统状态空间表达式为ss2tf函数——变状态空间表示为传递函数表示ss2zp函数——变状态空间表示为零极点表示编写程序,记录实验结果,并给出系统传递函数模型和零极点模型。
现代控制理论基础实验报告
紫金学院计算机系实验报告现代控制理论基础实验报告专业:年级:姓名:学号:提交日期:实验一 系统能控性与能观性分析1、实验目的:1.通过本实验加深对系统状态的能控性和能观性的理解;2.验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
2、实验内容:1.线性系统能控性实验;2. 线性系统能观性实验。
3、实验原理:系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中4321R R R R ≠,则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。
即系统能观的。
反之,当4321R R =R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制,u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。
1.1 当4321R RR R ≠时u L u i R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L u i C L C L ⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⨯⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=⎪⎪⎭⎫ ⎝⎛01)11(1)(1)(1)(143214343212143421243432121 (10-1)y=u c =[01]⎪⎪⎪⎭⎫⎝⎛c L u i (10-2)由上式可简写为bu Ax x+= cx y =式中⎪⎪⎭⎫ ⎝⎛=C L u i x ⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=)11(1)(1)(1)(143214343212143421243432121R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L A⎪⎪⎪⎭⎫⎝⎛=01L b 1] [0=c由系统能控能观性判据得][Ab brank =2 2=⎥⎦⎤⎢⎣⎡cA c rank故系统既能控又能观。
现代控制理论实验报告
现代控制理论实验指导书实验一:线性系统状态空间分析1、模型转换图1、模型转换示意图及所用命令传递函数一般形式:)()(11101110n m a s a s a s a b s b s b s b s G n n n n m m m m ≤++++++++=----MATLAB 表示为:G=tf(num,den),其中num,den 分别是上式中分子,分母系数矩阵。
零极点形式:∏∏==--=n i j mi i ps z s K s G 11)()()( MATLAB 表示为:G=zpk(Z,P,K),其中 Z ,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。
传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN);状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu 表示对系统的第iu 个输入量求传递函数;对单输入iu 为1;验证教材P438页的例9-6。
求P512的9-6题的状态空间描述。
>> A=[0 1;0 -2];>> B=[1 0;0 1];>> C=[1 0;0 1];>> D=[0 0;0 0];>> [NUM,DEN] = ss2tf(A,B,C,D,1)NUM =0 1 20 0 0DEN =1 2 0>> [NUM,DEN] = ss2tf(A,B,C,D,2)NUM =0 0 10 1 0DEN =1 2 0给出的结果是正确的,是没有约分过的形式P512 9-6>> [A,B,C,D]=tf2ss([1 6 8],[1 4 3])A =-4 -31 0B =1C =2 5D =12、状态方程求解单位阶跃输入作用下的状态响应:G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应[y,t,x]=initial(G,x0)其中,x0为状态初值。
现代控制理论实验

现代控制理论实验华北电力大学实验报告||实验名称状态空间模型分析课程名称现代控制理论基础||专业班级:自动化1203 学生姓名:孟令虎学号:201209020216 成绩:指导教师:刘鑫屏老师实验日期: 2015.4.24一、实验目的l.加强对现代控制理论相关知识的理解;2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验仪器与软件 1. MATLAB7.6 环境三、实验内容1、 模型转换例 1.把传递函数模型转化为状态空间模型3248G s =81912s s s s ++++()。
解:程序如下num=[4 8]; den=[1 8 19 12];[A,B,C,D]=tf2ss(num,den); G=ss(A,B,C,D) 运行结果: A =-8 -19 -12 1 0 0 0 1 0 B = 1 0 0 C =0 4 8 D =0 结果为112233-8 -19 -1211 0 010 1 00x x x x u x x ∙∙∙⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦,[]1230 4 8x y x x ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦例2.把状态空间模型转化为传递函数模型A=0 1 00 0 1-6 -11 -6⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦B=001⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦C= []2 3 0 D=0。
解:程序如下:clearA=[0 1 0;0 0 1;-6 -11 -6]; B=[0;0;1]; C=[3 2 0]; D=0; iu=1;[num,den] = ss2tf(A,B,C,D,iu); sys=tf(num,den) 运行结果为:Transfer function: 2 s + 3---------------------- s^3 + 6 s^2 + 11 s + 62、 状态方程状态解和输出解例1.单位阶跃输入作用下的状态响应A=0 1 00 0 1-6 -11 -6⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦B=001⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦C=[]2 3 0 D=0。
现代控制理论基础实验报告 2
紫金学院计算机系实验报告现代控制理论基础实验报告专业:______自动化_____________年级:_______2011级______________姓名:__________孙青山_________________学号:____________110603152_______________ 提交日期:_____5.29__________________实验一 系统能控性与能观性分析1. 实验目的:1.通过本实验加深对系统状态的能控性和能观性的理解;2.验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
2. 实验内容:1.线性系统能控性实验; 2.线性系统能观性实验 3. 实验原理:系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中4321R R R R ≠, 则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。
即系统能观的。
反之,当4321R R=R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制,u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。
1.1 当4321R RR R ≠时r u ⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+-+-⎪⎪⎭⎫ ⎝⎛+++-⎪⎪⎭⎫ ⎝⎛+-+-⎪⎪⎭⎫ ⎝⎛+++-=⎥⎦⎤⎢⎣⎡0L 1u i R R 1R R 1C 1R R R R R R R R C 1R R R R R R R R L 1R R R R R R R R L 1u i c L 4321434321214343212143432121c L (10-1) []⎥⎦⎤⎢⎣⎡==c L c u i u y 10 (10-2)由上式可简写为bu Ax x+= cx y = 式中⎥⎦⎤⎢⎣⎡=C L u i x ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+-+-⎪⎪⎭⎫ ⎝⎛+++-⎪⎪⎭⎫ ⎝⎛+-+-⎪⎪⎭⎫ ⎝⎛+++-=4321434321214343212143432121R R 1R R 1C 1R R R R R R R R C 1R R R R R R R R L 1R R R R R R R R L 1A⎥⎥⎦⎤⎢⎢⎣⎡=01L b 1] [0=c由系统能控能观性判据得][Ab b rank =2 2=⎥⎦⎤⎢⎣⎡cA c rank故系统既能控又能观。
《现代控制理论》实验报告
.现代控制理论实验报告组员:院系:信息工程学院专业:指导老师:年月日实验1 系统的传递函数阵和状态空间表达式的转换[实验要求]应用MATLAB 对系统仿照[例1.2]编程,求系统的A 、B 、C 、阵;然后再仿照[例1.3]进行验证。
并写出实验报告。
[实验目的]1、学习多变量系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法;2、通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。
[实验内容]1 设系统的模型如式(1.1)示。
p m n R y R u R x DCx y Bu Ax x ∈∈∈⎩⎨⎧+=+= (1.1)其中A 为n ×n 维系数矩阵、B 为n ×m 维输入矩阵 C 为p ×n 维输出矩阵,D 为传递阵,一般情况下为0,只有n 和m 维数相同时,D=1。
系统的传递函数阵和状态空间表达式之间的关系如式(1.2)示。
D B A SI C s den s num s G +-==-1)()()(()( (1.2)式(1.2)中,)(s num 表示传递函数阵的分子阵,其维数是p ×m ;)(s den 表示传递函数阵的按s 降幂排列的分母。
2 实验步骤① 根据所给系统的传递函数或(A 、B 、C 阵),依据系统的传递函数阵和状态空间表达式之间的关系如式(1.2),采用MATLA 的file.m 编程。
注意:ss2tf 和tf2ss 是互为逆转换的指令;② 在MATLA 界面下调试程序,并检查是否运行正确。
③ [1.1] 已知SISO 系统的状态空间表达式为(1.3),求系统的传递函数。
,2010050010000100001043214321u x x x x x x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡ []⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=43210001x x x x y (1.3)程序:A=[0 1 0 0;0 0 -1 0;0 0 0 1;0 0 5 0]; B=[0;1;0;-2]; C=[1 0 0 0]; D=0;[num,den]=ss2tf(A,B,C,D,1)程序运行结果:num =0 -0.0000 1.0000 -0.0000 -3.0000 den =1.0000 0 -5.0000 0 0从程序运行结果得到:系统的传递函数为:24253)(ss s S G --= ④ [1.2] 从系统的传递函数式求状态空间表达式。
现代控制实验

经典控制理论的研究对象主要是单输入单输出的系统,控制器设计时一般需要有关被控对象的较精确模型,现代控制理论主要是依据现代数学工具,将经典控制理论的概念扩展到多输入多输出系统。
极点配置问题就是通过选择反馈增益矩阵,将闭环系统的极点恰好配置在根平面上所期望的位置,以获得所希望的动态性能。
1、状态空间分析对于控制系统 X=AX+Bu 式中 X 为状态向量(n 维) u 控制向量(纯量) A n × n 维常数矩阵 B n ×1维常数矩阵 选择控制信号为: u = KX求解上式,得到 X(t )= (A +BK )x (t ) 方程的解为: x (t ) = e ( A +BK )t x (0)可以看出,如果系统状态完全可控,K 选择适当,对于任意的初始状态,当t 趋于无穷时,都可以使x (t )趋于0。
状态反馈闭环控制原理图如下所示:极点配置的设计步骤: (1)检验系统的可控性条件 (2)从矩阵 A 的特征多项式 αααn 1n 1n 1nS A sI s s ++++=---来确定ααn1的值。
(3)确定使状态方程变为可控标准型的变换矩阵 T T=WM 其中 =M []b b bAA2n 1n --W=⎥⎥⎥⎥⎥⎦⎢⎢⎢⎢⎢⎣---11n 2n 11n αααα (4)利用所期望的特征值,写出期望的多项式 ()()()=---μμμn21s s s αααn 1n 1n 1ns ss ++++--并确定αααn21,,的值。
(5)需要的状态反馈增益矩阵K 由以下方程确定2、极点配置及仿真直线一级倒立摆的状态空间模型,以小车加速度作为输入的系统状态方程为:μφφφφ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡X X ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡X X .820100.82800100000000010 μφφφ⎥⎦⎤⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡X X ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡X =Y 0001000001 则有:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=B ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=A 00D 01000001C .820100.82800100000000010 直线一级倒立摆的极点配置转化为:对于如上所述的系统,设计控制器,要求系统具有较短的调整时间(约3秒)和合适的阻尼(阻尼比ς = 0.5)。
现代控制理论实验报告

现代控制理论实验报告实验⼀线性定常系统模型⼀实验⽬的1. 掌握线性定常系统的状态空间表达式。
学会在MATLAB 中建⽴状态空间模型的⽅法。
2. 掌握传递函数与状态空间表达式之间相互转换的⽅法。
学会⽤MATLAB 实现不同模型之间的相互转换。
3. 熟悉系统的连接。
学会⽤MA TLAB 确定整个系统的状态空间表达式和传递函数。
4. 掌握状态空间表达式的相似变换。
掌握将状态空间表达式转换为对⾓标准型、约当标准型、能控标准型和能观测标准型的⽅法。
学会⽤MATLAB 进⾏线性变换。
⼆实验内容1. 已知系统的传递函数,(1)建⽴系统的TF 或ZPK 模型。
(a) )3()1(4)(2++=s s s s G(b) 3486)(22++++=s s s s s G(2)将给定传递函数⽤函数ss( )转换为状态空间表达式。
再将得到的状态空间表达式⽤函数tf( )转换为传递函数,并与原传递函数进⾏⽐较2. 已知系统的状态空间表达式(a) u x x+--=106510 []x y 11= (1)建⽴给定系统的状态空间模型。
⽤函数eig( ) 求出系统特征值。
⽤函数tf( ) 和zpk( )将这些状态空间表达式转换为传递函数,记录得到的传递函数和它的零极点。
⽐较系统的特征值和极点是否⼀致,为什么?给定系统的状态空间模型⽤函数eig( ) 求出系统特征值⽤函数tf( ) 将状态空间表达式转换为传递函数⽤函数zpk( ) 将状态空间表达式转换为传递函数(b) u x x ??+---=7126712203010 []111=y 给定系统的状态空间模型⽤函数tf( ) 和zpk( )将状态空间表达式转换为传递函数实验⼆线性定常系统状态⽅程的解⼀、实验⽬的1. 掌握状态转移矩阵的概念。
学会⽤MA TLAB 求解状态转移矩阵。
2. 掌握线性系统状态⽅程解的结构。
学会⽤MATLAB 求解线性定常系统的状态响应和输出响应,并绘制相应曲线。
现代控制理论实验报告
现代控制理论实验报告实验报告(2016-2017年度第二学期)名称:《现代控制理论基础》题目:状态空间模型分析院系:控制科学与工程学院班级:___学号:__学生姓名:______指导教师:_______成绩:日期:2017年4月15日线控实验报告一、实验目得::l。
加强对现代控制理论相关知识得理解;2、掌握用matlab进行系统李雅普诺夫稳定性分析、能控能观性分析;二、实验内容第一题:已知某系统得传递函数为求解下列问题:(1)用matlab表示系统传递函数num=[1];den=[132];sys=tf(num,den);sys1=zpk([],[-1-2],1);结果:sys=1—-------——--—s^2+3s+2sys1=1--——-——--——(s+1)(s+2)(2)求该系统状态空间表达式:[A1,B1,C1,D1]=tf2ss(num,den);A=-3—210B=10C=1第二题:已知某系统得状态空间表达式为::求解下列问题:(1)求该系统得传递函数矩阵:(2)该系统得能观性与能空性:(3)求该系统得对角标准型:(4)求该系统能控标准型:(5)求该系统能观标准型:(6)求该系统得单位阶跃状态响应以及零输入响应:解题过程:程序:A=[—3-2;10];B=[10]';C=[01];D=0;[num,den]=ss2tf(A,B,C,D);co=ctrb(A,B);t1=rank(co);ob=obsv(A,C);t2=rank(ob);[At,Bt,Ct,Dt,T]=canon(A,B,C,D,'modal’);[Ac,Bc,Cc,Dc,Tc]=canon(A,B,C,D,"companion');Ao=Ac";Bo=Cc";Co=Bc';结果:(1)num=01den=132(2)能控判别矩阵为:co=1—31能控判别矩阵得秩为:t1=2故系统能控。
现代控制理论实验报告
现代控制理论实验指导书实验一:线性系统状态空间分析1、模型转换图1、模型转换示意图及所用命令传递函数一般形式:)()(1111110nmasasasabsbsbsbsGnnnnmmmm≤++++++++=----MATLAB表示为:G=tf(num,den),其中num,den分别是上式中分子,分母系数矩阵。
零极点形式:∏∏==--=nijmiipszsKsG11)()()(MATLAB表示为:G=zpk(Z,P,K),其中Z,P,K分别表示上式中的零点矩阵,极点矩阵和增益。
传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN);状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu表示对系统的第iu个输入量求传递函数;对单输入iu为1;验证教材P438页的例9-6。
求P512的9-6题的状态空间描述。
>> A=[0 1;0 -2];>> B=[1 0;0 1];>> C=[1 0;0 1];>> D=[0 0;0 0];>> [NUM,DEN] = ss2tf(A,B,C,D,1)NUM =0 1 20 0 0DEN =1 2 0>> [NUM,DEN] = ss2tf(A,B,C,D,2)NUM =0 0 10 1 0DEN =1 2 0给出的结果是正确的,是没有约分过的形式P512 9-6>> [A,B,C,D]=tf2ss([1 6 8],[1 4 3])A =-4 -31 0B =1C =2 5D =12、状态方程求解单位阶跃输入作用下的状态响应:G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x).零输入响应[y,t,x]=initial(G,x0)其中,x0为状态初值。
验证P435的例9-4,P437的例9-5。
9-4A=[0 1;-2 -3];B=[0;0];C=[0 0];D=[0];G=ss(A,B,C,D);[y,t,x]=initial(G,[1;2]);plot(t,x)(设初始状态为[1 ;2])零输入响应00.20.40.60.81 1.2 1.4 1.6 1.82-1-0.50.511.529-5零输入响应A=[0 1;-2 -3];B=[0;1];C=[0 0];D=[0];G=ss(A,B,C,D);[y,t,x]=initial(G,[1;2]);plot(t,x)00.20.40.60.81 1.2 1.4 1.6 1.82-1-0.50.511.52零状态响应,阶跃信号激励下>> A=[0 1;-2 -3];B=[0;1];C=[0 0];D=[0];>> G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x)00.20.40.60.81 1.2 1.4 1.6 1.8200.050.10.150.20.250.30.350.4总响应>> A=[0 1;-2 -3];B=[0;1];C=[0 0];D=[0];G=ss(A,B,C,D);[y1,t1,x1]=step(G);[y2,t2,x2]=initial(G,[1;2]);>> x=x1+x2;>> plot(t1,x)00.20.40.60.81 1.2 1.4 1.6 1.82-0.500.511.523、系统可控性和可观测性可控性判断:首先求可控性矩阵:co=ctrb(A ,B)。
现代控制理论实验报告

现代控制理论实验报告学院:机电学院学号:XXXXX姓名:XXXXX班级:XXXX实验一 系统的传递函数阵和状态空间表达式的转换一、实验目的1.熟悉线性系统的数学模型、模型转换。
2.了解MATLAB 中相应的函数 二、实验内容及步骤 1.给定系统的传递函数为1503913.403618)(23++++=s s s s s G 要求(1)将其用Matlab 表达;(2)生成状态空间模型。
2.在Matlab 中建立如下离散系统的传递函数模型y (k + 2) +5y (k +1) +6y (k ) = u (k + 2) + 2u (k +1) +u (k ) 3.在Matlab 中建立如下传递函数阵的Matlab 模型⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++++++++++=726611632256512)(2322s s s s s s s s s s s s G 4.给定系统的模型为)4.0)(25)(15()2(18)(++++=s s s s s G求(1)将其用Matlab 表达;(2)生成状态空间模型。
5.给定系统的状态方程系数矩阵如下:[]0,360180,001,0100011601384.40==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=D C B A用Matlab 将其以状态空间模型表示出来。
6.输入零极点函数模型,零点z=1,-2;极点p=-1,2,-3 增益k=1;求相应的传递函数模型、状态空间模型。
三、实验结果及分析 1. 程序代码如下:num = [18 36];den = [1 40.3 391 150]; tf(num,den) ss(tf(num,den))Transfer function:18 s + 36----------------------------s^3 + 40.3 s^2 + 391 s + 150a =x1 x2 x3x1 -40.3 -24.44 -2.344x2 16 0 0x3 0 4 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 1.125 0.5625d =u1y1 0Continuous-time model.2.2.程序代码如下:num=[1 2 1];den=[1 5 6];tf(num,den,-1)运行结果:Transfer function:z^2 + 2 z + 1-------------z^2 + 5 z + 6Sampling time: unspecified3.程序代码如下:num={[1 2 1],[1 5];[2 3],[6]};den={[1 5 6],[1 2];[1 6 11 6],[2 7]};tf(num,den)Transfer function from input 1 to output...s^2 + 2 s + 1#1: -------------s^2 + 5 s + 62 s + 3#2: ----------------------s^3 + 6 s^2 + 11 s + 6Transfer function from input 2 to output...s + 5#1: -----s + 26#2: -------2 s + 74. 程序代码如下:sys=zpk(-2,[-15 -25 -0.4],18)ss(sys)运行结果:1)Zero/pole/gain:18 (s+2)---------------------(s+15) (s+25) (s+0.4)2)a =x1 x2 x3x1 -0.4 1.265 0x2 0 -15 1x3 0 0 -25b =u1x1 0x2 0x3 8c =x1 x2 x3y1 2.846 2.25 0d =u1y1 0Continuous-time model.5.程序代码如下:A=[-40.4 -138 -160;1 0 0;0 1 0];B=[1 0 0]';C=[0 18 360];D=0;ss(A,B,C,D)运行结果:a =x1 x2 x3x1 -40.4 -138 -160x2 1 0 0x3 0 1 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 18 360d =u1y1 0Continuous-time model.6. 程序代码如下:sys=zpk([1 -2],[-1 2 -3],1) tf(sys)ss((sys)运行结果:Zero/pole/gain:(s-1) (s+2)-----------------(s+1) (s+3) (s-2)Transfer function:s^2 + s - 2---------------------s^3 + 2 s^2 - 5 s - 6a =x1 x2 x3x1 -1 2.828 1.414x2 0 2 2x3 0 0 -3b =u1x1 0x2 0x3 2c =x1 x2 x3y1 -0.7071 1 0.5d =u1y1 0Continuous-time model.四、实验总结本次实验主要是熟悉利用matlab建立线性系统数学模型以及模型间的相应转换(如状态空间、传递函数模型等)、并了解matlab中相应函数的使用,如tf、ss、zp2ss、ss2tf等。
现代控制理论实验报告
现代控制理论实验报告实验三典型非线性环节实验目的1.了解和掌握典型非线性环节的原理。
2.用相平面法观察和分析典型非线性环节的输出特性。
实验原理及说明实验以运算放大器为基本元件,在输入端和反馈网络中设置相应元件(稳压管、二极管、电阻和电容)组成各种典型非线性的模拟电路。
实验内容3.1测量继电特性(1)将信号发生器(B1)的幅度控制电位器中心Y测孔,作为系统的-5V~+5V输入信号(Ui):B1单元中的电位器左边K3开关拨上(-5V),右边K4开关也拨上(+5V)。
(2)模拟电路产生的继电特性:继电特性模拟电路见图慢慢调节输入电压,观测并记录示波器上的U0~U i图形。
函数发生器产生的继电特性①函数发生器的波形选择为‘继电’,调节“设定电位器1”,使数码管右显示继电限幅值为3.7V。
U0~U i图形。
实验结果与理想继电特性相符3.2测量饱和特性将信号发生器(B1)的幅度控制电位器中心Y测孔,作为系统的-5V~+5V输入信号(Ui):(2)模拟电路产生的饱和特性:饱和特性模拟电路见图3-4-6。
慢慢调节输入电压观测并记录示波器上的U0~U i图形。
如下所示:函数发生器产生的饱和特性①函数发生器的波形选择为‘饱和’特性;调节“设定电位器1”,使数码管左显示斜率为2;调节“设定电位器2”,使数码管右显示限幅值为3.7V。
慢慢调节输入电压(即调节信号发生器B1单元的电位器,调节范围-5V~+5V),观测并记录示波器上的U0~U i图形。
波形如下:3.3测量死区特性模拟电路产生的死区特性慢慢调节输入电压,观测并记录示波器上的U0~U i图形。
如下所示:观察函数发生器产生的死区特性:观察时要用虚拟示波器中的X-Y选项慢慢调节输入电压(即调节信号发生器B1单元的电位器,调节范围-5V~+5V),观测并记录示波器上的U0~U i图形。
波形如下图所示:3.4测量间隙特性模拟电路产生的间隙特性间隙特性的模拟电路见图3-4-8。
现代控制理论实验报告河南工业大学
河南工业大学现代控制理论实验报告姓名:朱建勇班级:自动1306学号: 0601现代控制理论实验报告专业: 自动化 班级: 自动1306 姓名: 朱建勇 学号: 0601 成绩评定:一、实验题目:线性系统状态空间表达式的建立以及线性变换二、实验目的1. 掌握线性定常系统的状态空间表达式。
学会在MATLAB 中建立状态空间模型的方法。
2. 掌握传递函数与状态空间表达式之间相互转换的方法。
学会用MATLAB 实现不同模型之间的相互转换。
3. 熟悉系统的连接。
学会用MATLAB 确定整个系统的状态空间表达式和传递函数。
4. 掌握状态空间表达式的相似变换。
掌握将状态空间表达式转换为对角标准型、约当标准型、能控标准型和能观测标准型的方法。
学会用MATLAB 进行线性变换。
三、实验仪器个人笔记本电脑 Matlab R2014a 软件四、实验内容1. 已知系统的传递函数 (a) )3()1(4)(2++=s s s s G(b) 3486)(22++++=s s s s s G(c) 61161)(232+++++=z z z z z z G(1)建立系统的TF 或ZPK 模型。
(2)将给定传递函数用函数ss( )转换为状态空间表达式。
再将得到的状态空间表达式用函数tf( )转换为传递函数,并与原传递函数进行比较。
(3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。
再将得到的对角标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
(4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。
再将得到的能控标准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
v1.0 可编辑可修改2. 已知系统的状态空间表达式(a) u x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=106510 []x y 11=(b) u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=7126712203010 []111=y (c) u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=357213********* []x y 101=(d) u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=011310301100 []x y 210-= (1)建立给定系统的状态空间模型。
现代控制理论基础实验报告要点
紫金学院计算机系实验报告现代控制理论基础实验报告专业:年级:姓名:学号:提交日期:实验一 系统能控性与能观性分析1、实验目的:1.通过本实验加深对系统状态的能控性和能观性的理解;2.验证实验结果所得系统能控能观的条件与由它们的判据求得的结果完全一致。
2、实验内容:1.线性系统能控性实验;2. 线性系统能观性实验。
3、实验原理:系统的能控性是指输入信号u 对各状态变量x 的控制能力。
如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间内把系统所有的状态变量转移到状态空间的坐标原点。
则称系统是能控的。
系统的能观性是指由系统的输出量确定系统所有初始状态的能力。
如果在有限的时间内,根据系统的输出能唯一地确定系统的初始状态,则称系统能观。
对于图10-1所示的电路系统,设i L 和u c 分别为系统的两个状态变量,如果电桥中4321R R R R ≠,则输入电压u 能控制i L 和u c 状态变量的变化,此时,状态是能控的;状态变量i L 与u c 有耦合关系,输出u c 中含有i L 的信息,因此对u c 的检测能确定i L 。
即系统能观的。
反之,当4321R R =R R 时,电桥中的c 点和d 点的电位始终相等, u c 不受输入u 的控制,u 只能改变i L 的大小,故系统不能控;由于输出u c 和状态变量i L 没有耦合关系,故u c 的检测不能确定i L ,即系统不能观。
1.1 当4321R RR R ≠时u L u i R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L u i C L C L ⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⨯⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=⎪⎪⎭⎫ ⎝⎛01)11(1)(1)(1)(143214343212143421243432121 (10-1)y=u c =[01]⎪⎪⎪⎭⎫⎝⎛c L u i (10-2)由上式可简写为bu Ax x+= cx y =式中⎪⎪⎭⎫ ⎝⎛=C L u i x ⎪⎪⎪⎪⎪⎭⎫+++-+-+-⎝⎛+-+-+++-=)11(1)(1)(1)(143214343212143421243432121R R R R C R R R R R R R R L R R R R R R C R R R R R R R R L A⎪⎪⎪⎭⎫⎝⎛=01L b 1] [0=c由系统能控能观性判据得][Ab brank =2 2=⎥⎦⎤⎢⎣⎡cA c rank故系统既能控又能观。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0
;C
1
1
0
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根保通据护过生高管产中线工资敷艺料设高试技中卷术资配0料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高高与中中带资资负料料荷试试下卷卷高问总中题体资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况中卷下,安与要全过加,度强并工看且作护尽下关可都于能可管地以路缩正高小常中故工资障作料高;试中对卷资于连料继接试电管卷保口破护处坏进理范行高围整中,核资或对料者定试对值卷某,弯些审扁异核度常与固高校定中对盒资图位料纸置试,.卷保编工护写况层复进防杂行腐设自跨备动接与处地装理线置,弯高尤曲中其半资要径料避标试免高卷错等调误,试高要方中求案资技,料术编试交写5、卷底重电保。要气护管设设装线备备置敷4高、调动设中电试作技资气高,术料课中并中3试、件资且包卷管中料拒含试路调试绝线验敷试卷动槽方设技作、案技术,管以术来架及避等系免多统不项启必方动要式方高,案中为;资解对料决整试高套卷中启突语动然文过停电程机气中。课高因件中此中资,管料电壁试力薄卷高、电中接气资口设料不备试严进卷等行保问调护题试装,工置合作调理并试利且技用进术管行,线过要敷关求设运电技行力术高保。中护线资装缆料置敷试做设卷到原技准则术确:指灵在导活分。。线对对盒于于处调差,试动当过保不程护同中装电高置压中高回资中路料资交试料叉卷试时技卷,术调应问试采题技用,术金作是属为指隔调发板试电进人机行员一隔,变开需压处要器理在组;事在同前发一掌生线握内槽图部内纸故,资障强料时电、,回设需路备要须制进同造行时厂外切家部断出电习具源题高高电中中源资资,料料线试试缆卷卷敷试切设验除完报从毕告而,与采要相用进关高行技中检术资查资料和料试检,卷测并主处且要理了保。解护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
输出为: r=
3 则系统能观测性矩阵满秩,系统能观测。 (2)输入以下语句 >> A=[1 0 0;0 2 1;0 0 2];B=[1;0;1];C=[1 1 0]; >> A1=A';C1=C';P=[-3 -4 -5]; >> G1=acker(A1,C1,P); >> G=G1' 输出为: G=
例 5-15 线性控制系统的状态方程为
x Ax Bu 式中
6 11 6 1
A 1 0
0
0 1 0 0
;
B
一、实验目的 掌握利用 MATLAB 来确定状态反馈矩阵 二、实验步骤 (1)首先判断系统的能控性,则输入 >> A=[-6 -11 -6;1 0 0;0 1 0];B=[1;0;0];r=rank(ctrb(A,B))
r=
0
3 则系统能控性矩阵满秩,系统能控,可以应用状态反馈,任意配置极点 (2)输入以下语句 >> A=[-6 -11 -6;1 0 0;0 1 0];B=[1;0;0];P=[-10 -11 -12]; >> K=place(A,B,P) (3)执行结果为 K=
1.0e+003 *
0.0270 0.3510 1.3140 则表明状态反馈矩阵为 K=[27 351 1314] 三、实验体会
通过本次实验我懂得了利用 MATLAB 来确定状态反馈矩阵。
例 5-16 某线性控制系统的状态方程为
x Ax Bu, y Cx 式中,
A 0
1 0 0 1
2
1
0 0 2 1
;
B
一、实验目的 掌握利用 MATLAB 来设计系统状态观测器 二、实验步骤 (1)首先判断系统的能观测性,输入 >> A=[1 0 0;0 2 1;0 0 2];B=[1;0;1];C=[1 1 0]; >> r=rank(obsv(A,C))
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根保通据护过生高管产中线工资敷艺料设高试技中卷术资配0料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高高与中中带资资负料料荷试试下卷卷高问总中题体资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况中卷下,安与要全过加,度强并工看且作护尽下关可都于能可管地以路缩正高小常中故工资障作料高;试中对卷资于连料继接试电管卷保口破护处坏进理范行高围整中,核资或对料者定试对值卷某,弯些审扁异核度常与固高校定中对盒资图位料纸置试,.卷保编工护写况层复进防杂行腐设自跨备动接与处地装理线置,弯高尤曲中其半资要径料避标试免高卷错等调误,试高要方中求案资技,料术编试交写5、卷底重电保。要气护管设设装线备备置敷4高、调动设中电试作技资气高,术料课中并中3试、件资且包卷管中料拒含试路调试绝线验敷试卷动槽方设技作、案技术,管以术来架及避等系免多统不项启必方动要式方高,案中为;资解对料决整试高套卷中启突语动然文过停电程机气中。课高因件中此中资,管料电壁试力薄卷高、电中接气资口设料不备试严进卷等行保问调护题试装,工置合作调理并试利且技用进术管行,线过要敷关求设运电技行力术高保。中护线资装缆料置敷试做设卷到原技准则术确:指灵在导活分。。线对对盒于于处调差,试动当过保不程护同中装电高置压中高回资中路料资交试料叉卷试时技卷,术调应问试采题技用,术金作是属为指隔调发板试电进人机行员一隔,变开需压处要器理在组;事在同前发一掌生线握内槽图部内纸故,资障强料时电、,回设需路备要须制进同造行时厂外切家部断出电习具源题高高电中中源资资,料料线试试缆卷卷敷试切设验除完报从毕告而,与采要相用进关高行技中检术资查资料和料试检,卷测并主处且要理了保。解护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
1 0 11
0 1 0
x2 x3 x4
1
0
1
掌握利用 MATLAB 来设计单级倒立系统的极点配置与状态观测器
二、实验步骤
(1)先判断系统的能控性矩阵是否满秩,输入
>> A=[0 1 0 0;0 0 -1 0;0 0 0 1;0 0 11 0];
>> B=[0;1;0;-1];
>> C=[1 0 0 0];
>> rct=rank(ctrb(A,B))
输出为
rct =
4 则系统的能控性矩阵满秩,该系统是能控的。
u,
y
1
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根保通据护过生高管产中线工资敷艺料设高试技中卷术资配0料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高高与中中带资资负料料荷试试下卷卷高问总中题体资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况中卷下,安与要全过加,度强并工看且作护尽下关可都于能可管地以路缩正高小常中故工资障作料高;试中对卷资于连料继接试电管卷保口破护处坏进理范行高围整中,核资或对料者定试对值卷某,弯些审扁异核度常与固高校定中对盒资图位料纸置试,.卷保编工护写况层复进防杂行腐设自跨备动接与处地装理线置,弯高尤曲中其半资要径料避标试免高卷错等调误,试高要方中求案资技,料术编试交写5、卷底重电保。要气护管设设装线备备置敷4高、调动设中电试作技资气高,术料课中并中3试、件资且包卷管中料拒含试路调试绝线验敷试卷动槽方设技作、案技术,管以术来架及避等系免多统不项启必方动要式方高,案中为;资解对料决整试高套卷中启突语动然文过停电程机气中。课高因件中此中资,管料电壁试力薄卷高、电中接气资口设料不备试严进卷等行保问调护题试装,工置合作调理并试利且技用进术管行,线过要敷关求设运电技行力术高保。中护线资装缆料置敷试做设卷到原技准则术确:指灵在导活分。。线对对盒于于处调差,试动当过保不程护同中装电高置压中高回资中路料资交试料叉卷试时技卷,术调应问试采题技用,术金作是属为指隔调发板试电进人机行员一隔,变开需压处要器理在组;事在同前发一掌生线握内槽图部内纸故,资障强料时电、,回设需路备要须制进同造行时厂外切家部断出电习具源题高高电中中源资资,料料线试试缆卷卷敷试切设验除完报从毕告而,与采要相用进关高行技中检术资查资料和料试检,卷测并主处且要理了保。解护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
0
0
0
x1
x2
x4
(2)输入 >> A=[0 1 0 0;0 0 -1 0;0 0 0 1;0 0 11 0]; >> B=[0;1;0;-1]; >> P=[-6 -6.5 -7 -7.5]; >> K=place(A,B,P) 输出为 K= -204.7500 -122.1750 -488.5000 -149.1750 采用 MATLAB/Simulink 构造单级倒立摆状态反馈控制系统的仿真模型如下:
120 -103 210 则表明状态观测矩阵为
状态观测的方程为
三、实验体会 通过本次实验我懂得了利用 MATLAB 来设计系统状态观测器