整车操纵稳定性仿真分析报告分析解析
四轮转向车辆操纵稳定性仿真分析
宋凯凯▶◀……………………………………………………………………………四轮转向车辆操纵稳定性仿真分析前言随着科技的进步和汽车产业的发展,人们对于车辆操纵稳定性、舒适性和安全性的要求不断提高,四轮转向(Four-wheel steering ,4WS )作为一种有效改善车辆操纵性能的技术,吸引了国内外众多研究人员[1]。
使用4WS 技术的主要目的有:①减少车辆质心侧偏角β;②减少车辆横摆率与车辆横向加速度之间的相差;③增加轮胎横向力的裕度,使其远离饱和状态[2]。
运用4WS 技术可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速时行驶更加灵活、便于泊车。
同时,4WS 技术还可以大大地改善汽等瞬态响应指标,提高高速行驶时的操纵稳定性和舒适性[7]。
Matlab 作为一种面向科学和工程计算的高级计算机语言,已成为国际科技界公认的最优秀应用软件[3]。
Simulink 是Matlab 提供的主要工具箱之一,用于可视化的动态系统建模、仿真和分析。
它采用系统模块直观地描述系统典型环节,因此十分方便地建立系统模型而不需要花较多时间编程。
并可以对系统作适当的实时修正或者按照仿真的最佳效果来调试及整定控制系统的参数,以提高系统的性能,减少设计系统过程中反复修改的时间,实现高效率地开发系统的目标[2]。
本文基于Matlab/simulink 对四轮转向车辆的控制系统进行了设计,并对4WS 车辆的操纵稳定性进行了仿真研究。
4WS 车辆运动数学模型4WS 车辆模型根据自由度不同可分为二自由度、三自由度以及多自由度模型。
高自由度车辆模型虽然能较好地反映出汽车的运行状况,但研究起来困难很大。
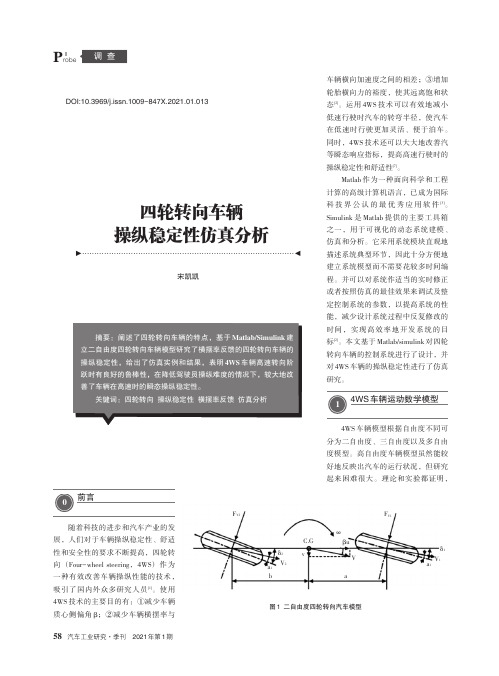
理论和实验都证明,F Y2F Y1δ2V 2a 1bavV C.Gβu ωV 1δ1a 1图1二自由度四轮转向汽车模型在正常车速的非紧急状态和小转向角情况下,包含横摆角速度和质心侧偏角的线性二自由度自行车模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作[4][8][10]。
基于EPS控制策略轿车整车操纵稳定性仿真分析及研究论文
基于EPS控制策略的轿车整车操纵稳定性仿真分析及研究【摘要】本文介绍一种基于eps控制策略的轿车整车操纵稳定性仿真分析及研究,研究发现pid控制中的积分增益对微型汽车的方向盘力矩影响比较大,其他几个数值对方向盘力矩和整车的横摆角速度影响较小,这将对轿车整车操纵稳定性的研究提供很好的研究依据。
【关键词】eps 仿真分析研究试验汽车操纵稳定性是指汽车能正确执行驾驶员通过转向系及转向车轮给定的行驶信号,并且当汽车在行驶过程中遇到外界干扰时,汽车具有抵消干扰安全行驶的能力[1]。
汽车控制是靠驾驶员对转向系统的操纵而进行的,在一般的操纵条件下能够达到要求,但汽车处于恶劣工作状态或紧急状况时,汽车的控制往往比较困难,而绝大多数交通事故就发生在这种非理想的驾驶状况下,所以在这些工况下增加辅助控制以提高汽车操纵性、稳定性是十分必要的[2][3]。
1汽车操纵稳定性的评价方法1.1评价方法汽车的操纵稳定性要通过实验才能进行评定,这种评定有客观评价法和主观评价方法[4]。
主观评价方法主要是通过让评价人员去驾驶,然后让评价人员根据的自己的经验和驾驶感觉做一个主观上的评价,然后按照评分标准来对汽车的操纵稳定性进行评分,主观评价有定量评价和定性评价两种形式。
操纵负荷,转弯的稳定性直线行驶的能力,行车变道的可操作性等式主观评价的评价内容。
用测试仪器测出表征汽车行驶性能的一些数值,如横摆角速度,侧向加速度,转向力等来对汽车的操纵稳定性进行评价的方法是客观评价。
对系统进行试验的话,一般要采用主观评价和客观评价相结合的方式,以期对汽车的操纵稳定性做出最准确的评判[5]。
2 eps控制策略的参数对整车操纵稳定性影响的仿真分析2.1控制策略参数分析本文采用的控制策略是pid控制,所以主要研究pid控制策略里面三个增益值,比例增益(p)、积分增益(i)、微分增益(d)对操纵稳定性的影响pid控制的三个增益值,通过仿真调节得到:1.比例增益p在在仿真调节的过程中,p的数值在0.2~1.13之间超调量和反应时间是比较合适的,所以把比例增益p的范围取在0.2~1.13之间,本文所选的三个比例增益数值分别为0.2、0.6650、1.1300。
某乘用车整车动力学模型验证及其操纵稳定性的分析与评价的开题报告
某乘用车整车动力学模型验证及其操纵稳定性的分析与评价的开题报告1.研究背景随着汽车技术的不断发展和需求的不断增加,汽车操纵稳定性成为了汽车发展的一个重要方向。
而整车动力学模型是评估车辆操纵稳定性的重要方法之一。
因此,对于乘用车整车动力学模型的验证以及操纵稳定性的分析与评价有着重要的意义。
2.研究内容本研究将通过以下几个方面进行乘用车整车动力学模型验证及其操纵稳定性的分析与评价。
2.1 整车动力学模型建立首先,本研究将采集乘用车一系列重要动力学参数,例如:转向系统转向角度、车轮侧向滑移角等,建立乘用车整车动力学模型,并通过模型验证来验证模型的准确性和可靠性。
2.2 稳定性分析接下来,本研究将对乘用车在不同情况下进行操纵稳定性分析。
通过针对转向系统的参数进行仿真,比如弯道半径与速度的关系、纵向加速度与车速的关系等,对车辆的稳定性进行评价。
2.3 制动系统的评价本研究将考虑到不同制动条件下,包括装载情况、不同路面条件、制动系统的反应时间等因素,对制动系统进行评价。
并通过制动系统评价的结果来判断整车操纵稳定性的好坏。
2.4 评价与总结最后,本研究将分析以上研究内容的结果,并对乘用车整车动力学模型以及操纵稳定性进行总结和评价,为制造商提供相应的完善建议,以提高车辆的性能和操控性。
3.思路提纲第一章:绪论1.1 研究背景与意义1.2 国内外研究现状1.3 研究内容及方法1.4 论文结构第二章:整车动力学模型验证2.1 建模方法2.2 模型验证结果第三章:操纵稳定性分析3.1 转向系统参数仿真分析3.2 纵向目标跟踪仿真分析3.3 侧向控制仿真分析第四章:制动系统的评价4.1 制动系统模型建立4.2 制动系统评价结果第五章:评价与总结5.1 研究结果分析5.2 制造商建议5.3 研究展望第六章:参考文献4.研究意义通过对乘用车整车动力学模型的验证,以及操纵稳定性的分析与评价,可以为制造商提供更有效的方案来提高车辆性能和操控性。
整车操纵稳定性仿真分析报告分析解析
L11整车操纵稳定性仿真分析报告(HB11A/HB12A)编制(日期)校对(日期)审核(日期)批准(日期)简式国际汽车设计(北京)有限公司L11整车操纵稳定性仿真分析报告(HB11A/HB12A)1.定半径稳态圆周试验试验方法HB11A处于满载状态,沿半径为40m的定半径圆周进行回转运动,开始以最低稳定速度进入圆周,找准方向盘的位置,使汽车可以沿圆周进行回转运动,开始记录,然后缓慢连续而均匀地加速(纵向加速度不超过m/s2),加速的同时调整方向盘转角以维持定半径圆周运动,这个过程中车辆不应超出车道m,直至不能维持稳态定半径圆周运动条件时或受发动机功率限制所能达到的最大侧向加速度为止。
记录整个过程,建议使用满足试验条件的最高档位。
试验按向左转和向右转两个方向进行,每次试验开始时车身应处于正中位置。
数据处理“方向盘转角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。
图1 方向盘转角—侧向加速度(左转)从图1 计算得到左转不足转向梯度为137o/g图2 方向盘转角—侧向加速度(右转)右转不足转向梯度为g,则HB11A平均不足转向梯度为g。
HB11A的角传动比约为,则不足转向梯度/转向系角传动比为g。
“质心侧偏角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。
图3 质心侧偏角——侧向加速度(左转)左转侧偏角梯度为g。
图4 质心侧偏角——侧向加速度(右转)右转侧偏角梯度为g,则HB11A平均侧偏角梯度为g。
“车身侧倾角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。
图5 车身侧倾角——侧向加速度(左转)左转侧倾角梯度为g。
图6 车身侧倾角—侧向加速度(右转)右转侧倾角梯度为g,则HB11A平均侧倾角梯度为g。
2.方向盘转角阶跃输入试验试验方法HB11A处于满载状态,以70km/h的车速稳定直线行驶,开始记录数据,以尽可能快的速度(阶跃时间为转动方向盘,达到预定的转角,保持方向盘转角不变直至汽车恢复稳定状态,试验过程中油门踏板开度应尽可能保持不变。
某高端载货汽车的操纵稳定性能仿真分析与调校

某高端载货汽车的操纵稳定性能仿真分析与调校随着经济的飞速发展和物流业的不断扩张,高端载货汽车的需求量不断增加。
而一辆高端载货汽车的操纵稳定性能对于货物的安全运输来说,至关重要。
本文将介绍一种基于仿真的分析方法,分析高端载货汽车的操纵稳定性能,并调整车辆的相关参数,从而提高车辆的操纵稳定性能。
首先,需要选定合适的仿真软件,本文选用了CarSim仿真软件。
CarSim是一款专门用于车辆动力学仿真的软件,可以对汽车的操纵稳定性能进行全面的分析。
在开始仿真之前,需要对车辆进行建模和参数设定。
本文以一辆某品牌高端载货汽车为例,将车辆转向角、车轮悬挂高度、车轮直径等关键参数输入CarSim软件。
然后,设置路面类型、转向角速度、加速度等仿真条件。
进行仿真分析时,需要结合车辆的运动学特性、动力学特性以及路面状况等因素进行分析。
首先进行的是稳态操纵仿真,即在车速稳定的情况下,模拟车辆向左或向右转动方向盘时的操纵稳定性能。
通过观察车辆的转角、侧向加速度、滑移率等参数的变化,分析车辆在不同操纵情况下的操纵稳定性能。
根据仿真数据,可以发现车辆存在侧滑和摆动等不稳定现象,需要进行调校改善车辆的操纵稳定性能。
接下来,根据仿真分析结果,对车辆进行调校。
调校主要包括三方面:悬挂调整、转向系统调整、轮胎调整。
在悬挂调整方面,可以调整悬挂硬度、弹簧预紧力、减震器抗压程度等参数,使车辆悬挂高度更适合不同场景的路面条件,从而改善车辆的行驶平稳性。
在转向系统调整方面,可以调整转向盘转角比、转向系统阻力、转向传动系数等参数,使车辆操纵更流畅,响应更灵敏。
在轮胎调整方面,可以调整轮胎胎压、轮胎硬度等参数,使车辆在不同路面条件下具备更好的牵引和防滑性能。
重新进行仿真分析,对调校结果进行测评。
通过对调校后的仿真数据进行分析,可以发现车辆在向左或向右转动方向盘时的反应更加稳定,行驶平稳性显著提升,操纵响应更加灵敏。
综上,基于仿真的分析方法可以有效提高高端载货汽车的操纵稳定性能。
汽车操纵稳定性的研究与评价

汽车操纵稳定性的研究与评价随着汽车工业的不断发展,汽车性能得到了显著提升。
汽车操纵稳定性作为衡量汽车性能的重要指标之一,直接影响着驾驶者的操控感受和行车安全。
因此,对汽车操纵稳定性进行深入研究,提高其评价水平,对于提升汽车产品竞争力具有重要意义。
汽车操纵稳定性研究主要涉及车辆动力学、控制理论、机械系统等多个领域,其目的是在各种行驶条件下,保证汽车具有良好的操控性能和稳定性。
然而,目前汽车操纵稳定性研究仍存在一定的问题,如评价标准不统测试条件不完善等,制约了其发展。
汽车操纵稳定性对于保证驾驶安全具有重要意义。
在行驶过程中,车辆受到外部干扰或自身惯性力的影响,容易导致车身失稳,从而引发交通事故。
良好的汽车操纵稳定性通过有效抑制车身晃动、调整轮胎磨损,为驾驶者提供稳定的操控感,降低交通事故风险。
影响汽车操纵稳定性的因素主要包括以下几个方面:(1)车辆动力学性能:车辆的加速、减速、转弯等动力学性能直接影响驾驶者的操控感受和行车安全。
(2)轮胎性能:轮胎的抓地力、摩擦系数等性能对车辆的操控性和稳定性具有重要影响。
(3)悬挂系统:悬挂系统的设计直接影响车辆的侧倾、振动等特性,从而影响操纵稳定性。
(4)驾驶者的操控技巧:驾驶者的预判、反应速度、操控技巧等直接影响车辆的操纵稳定性。
为提高汽车操纵稳定性,需要采取相应的控制策略。
其中,最重要的是采取主动控制策略,包括:(1)防抱死制动系统(ABS):通过调节制动压力,防止轮胎抱死,提高制动过程中的稳定性。
(2)电子稳定系统(ESP):通过传感器实时监测车辆状态,对过度转向或不足转向进行纠正,保证车辆稳定行驶。
(3)四轮驱动(4WD):通过将驱动力分配到四个轮胎上,提高车辆的加速性能和操控稳定性。
汽车操纵稳定性的评价主要从以下几个方面进行:(1)侧向稳定性:评价车辆在侧向受力情况下的稳定性。
(2)纵向稳定性:评价车辆在纵向受力情况下的稳定性。
(3)横向稳定性:评价车辆在横向受力情况下的稳定性。
汽车操纵稳定性试验解析汇报
汽车操纵稳定性试验解析!汽车的操稳性不仅影响到汽车驾驶的操纵方面,而且也是决定汽车安全行驶的一个主要性能;为了保证安全行驶,汽车的操稳性受到汽车设计者很大的重视,成为现代汽车的重要使用性能之一,如何试验并评价汽车的操稳性显得极其重要。
汽车操控稳定性分为两个方面:1、操控性: 指汽车能够确切的响应驾驶员转向指令的能力;2、稳定性:指汽车受到外界扰动(路面扰动或阵风扰动)后恢复原来运动状态的能力。
一、常用试验仪器1、陀螺仪:用于汽车运动状态下测动态参数,如汽车行进方位角,汽车横摆角速度,车身侧倾角及纵倾角等;2、光束水准车轮定位仪:测车轮外倾角,主销内倾角,主销外倾角,车轮前束,车轮最大转角及转角差;3、车辆动态测试仪:测汽车横摆角速度,车身侧倾角及纵倾角,汽车横向加速度与纵向加速度等运动参数;4、力矩及转角仪:测转向盘转角或力矩;5、五轮仪和磁带机等。
二、试验分类三、稳态回转试验01试验步骤1、在试验场上,用明显的颜色画出半径为15m或20m的圆周;2、接通仪器电源,使之加热到正常工作温度;3、试验开始前,汽车应以侧向加速度为3m/s2的相应车速沿画定的圆周行驶500m以使轮胎升温。
4、以最低稳定速度沿所画圆周行驶,待安装于汽车纵向对称面上的车速传感器在半圈内都能对准地面所画的圆周时,固定转向盘不动,停车并开始记录,记下各变量的零线,然后,汽车起步,缓缓连续而均匀地加速(纵向加速度不超过0·25m/s2),直至汽车的侧向加速度达到6·5m/s2为止,记录整个过程。
5、试验按向左转和右转两个方向进行,每个方向试验三次。
每次试验开始时车身应处于正中央。
02评价条件1、中性转向点侧向加速度值An:前后桥侧偏角之差与侧向加速度关系曲线上斜率为零的点的侧向加速度值,越大越好;2、不足转向度:按前后桥侧偏角之差与侧向加速度关系曲线上侧向加速度2m/s2点的平均值计算,越小越好;3、车厢侧倾度K:按车厢侧倾角与侧向加速度关系曲线上侧向加速度2m/s2点的平均斜率计算,越小越好。
某越野车操纵稳定性仿真分析
关键词 :操纵稳定性 ;平衡 悬架 :四轴 ;多体 动力学
中图分类号 :U 4 6 3 . 1 文献标识码 :A 文章编号 :1 6 7 1 — 7 9 8 8( 2 0 1 7 ) 0 6 — 9 9 — 0 3
Ca l c u l a t i o n o f Cr o s s t r e nc h wi d t h o f Of f - r o a d Ve hi c l e
s t a b i l i t y c a n g u a r nt a e e he t d r i v e r ’ S c o mf o r t , a l l o ws t h e d r i v e r t o s a f e nd a r e l i a b l e d iv r i n g a c a r , r e d u c e t h e p o s s i b i l i t y o f a r o a d a c c i d e n t . T h i s p a p e r t a k e s a n i n v e s t i g a t i o n O n a f o u r - a x l e h e a v y c o mm e r c i a l v e h i c l e . Mu l t i — b o d y d y n a mi c mo d e l a n d ma t h e ma t i c a l mo d e l o f he t v e h i c l e a r e c o n s t r u c t e d . On he t v e h i c l e s t e e r i n g s t a b i l i t y a n a l y s i s .
基于adams的汽车操纵稳定性仿真分析

摘要随着汽车技术的发展,用户对汽车性能的要求越来越高,汽车行业的竞争逐渐加剧。
在产品开发中采用虚拟样机分析的开发策略,已成为各大汽车公司缩短产品开发周期、减少产品开发费用、提高产品开发质量,从而提高竞争能力的主要做法。
以多体动力学为理论基础的ADAMS软件是由美国MDI公司开发的一种机械系统动力学分析软件。
目前己成为世界各主要汽车公司及其零部件供应商的主要动力学仿真软件。
利用ADAMS/Car软件,建立了包括前后悬架、转向、车身、动力总成、轮胎、路面等系统在内的整车多体动力学模型。
应用该模型进行了稳态回转、转向回正性、转向盘角阶跃输入、转向盘角脉冲输入、蛇行等仿真分析,同时还以操纵稳定性中的角阶跃试验为例,分别分析了汽车的质心高度、前后位置、前后悬架弹簧刚度和整车载荷等参数对操纵稳定性的影响。
仿真结果表明,该车具有良好的操纵稳定性,从分析来看质心略微前移汽车的操纵稳定性得到改善;而适当的降低质心高度、增加前后悬架弹簧刚度、和减少载荷,有利于整车的操纵稳定性。
关键词:ADAMS;仿真;操纵稳定性Simulation Analysis of Vehicle Handling Stability of Santana2000 Based on ADAMS/CarABSTRACTWith the development of the vehicle technology,and concerning about the car performance,the competition of the car industry becomes more and more intense.In the exploitation of the production,one of the main methods is to use the virtual prototyping technology to exploit the production of car,which may deeply shorter the competition ability,lessen the expenses,improve the quantity,and enhance the competition ability.Based on the multi-body dynamics theory exploited by Mechanical Dynamics,Inc,the ADAMS is a type of software of dynamic analysis of mechanical system.At present,many main car corporation and their accessory suppliers use the ADAMS an their main software of dynamic analysis of mechanical system.The article builds a whole vehicle model that contains suspension,stabilize bar, steering,body,powertrain,tires and road etc by using ADAMS/Car.Appling the full vehicle model,have performed Steady static circular test simulation,returnability test simulation,Steering wheel angle step input simulation,Steerwheel angle pulse input simulation,Pylon course slalom test simulation,and through triangular bump pulse input simulation test,several main factors are discussed in order to study the rule of vehicle parameters affecting on handing stability, including mass gravity center height, the location of center of mass, leaf spring stiffness and the load.The simulation results show that handing stability of the vehicle is good. From the analysis of the test, the centroid slightly forward is beneficial to handing stability. And suitably reducing the height of mass center, increasing front and rear leaf spring stiffness and load reduction can be improved handling stability performance.Key Words: ADMAS;Simulation;Handling Stability目录摘要 (I)ABSTRACT (II)引言 (1)1 绪言 (2)1.1 课题的研究背景 (2)1.2 课题研究的历史及发展现状 (3)1.2.1 车辆操纵稳定性研究历史及现状 (3)1.2.2 车辆动力学仿真技术发展及现状 (4)1.3 小结 (6)2 基于ADAMS/Car 的车辆建模 (7)2.1 ADAMS/Car 建模基本原理 (7)2.2 车辆仿真模型的相关参数 (8)2.3 前悬架模型的建立 (8)2.4 后悬架建立 (10)2.5 转向系模型的建立 (12)2.6 轮胎模型的建立 (13)2.7 车身模型 (15)2.8 动力模型的建立 (15)2.9 整车模型装配 (16)2.10 小结 (16)3 汽车操纵稳定性仿真试验及影响因素分析 (17)3.1 汽车操纵稳定性概述 (17)3.2 转向盘转角阶跃输入仿真试验 (18)3.2.1 车速为105km/h下的转向盘角阶跃输入仿真试验 (18)3.2.2 不同速度下转向盘角阶跃输入仿真试验 (20)3.2.3 不同弹簧刚度下转向盘角阶跃输入仿真试验 (21)3.2.4 不同质心高度转向盘角阶跃输入仿真试验 (24)3.2.5 质心前后位置转向盘角阶跃输入仿真试验 (25)3.2.6 满载与空载转向盘角阶跃输入仿真试验 (27)3.3 转向盘转角脉冲输入仿真实验 (28)3.3.1 汽车在105km/h下的转向盘转角脉冲试验 (28)3.3.2 不同速度下转向盘转角脉冲试验 (29)3.4 转向回正仿真试验 (31)3.5 稳态回转仿真实验 (32)3.6 蛇形仿真实验 (33)3.7 小结 (36)全文总结 (37)参考文献 (38)致谢................................................................................................ 错误!未定义书签。
基于Trucksim整车操纵稳定性仿真分析研究

图 1 T r u c k s i m 工 作 界 面 和 组 成
1 . 1 车辆模 型的建 立
立模 型 的可信 度 , 而且 在产 品开 发过 程 中减少 大量
的物 理样 机测 试 , 缩 短 了开 发周 期 , 大 大 降低 了开
发成 本 。
T r u c k s i m软 件 中车 辆 模 型 由车 体 、 轮胎 、 动 力 总成 、 悬架 系统 、 转 向系统 、 制动 系统 以及 空气 动力
D O I : 1 0 . 3 9 6 9 / j . i s s n . 2 0 9 5— 5 0 9 X . 2 0 1 7 . 0 2 . 0 0 6
基于 T r u c k s i m 整 车 操 纵 稳 定 性 仿 真 分 析 研 究
章 雪华 , 石柏 军 , 李 岩
( 华 南理 工大 学机 械 与汽车 工程 学 院 , 广东 广州 5 1 0 6 4 0 )
收 稿 日期 : 2 0 1 7一 O l一 0 5
1 ) 车体 : 以某款改装专用 车为例, 其 整 车 长/ 宽/ 高为 7 5 3 0 m m / 2 4 6 0 m m / 2 8 4 0 m m, 质 心 高 度 l 1 7 5 m m, 质心距前轴距离 1 1 0 0 m m, 轴距 4 2 om m, 簧
基于ADAMS的汽车操纵稳定性仿真试验分析
引 言
和沃尔沃等公司合作开发的轿车专用分析软件包 , 集成 了他 们 在 汽 车 设 计 、 开 发 方 面 的 专 家 经 验 ,在
干 扰而 保 持稳 定 行驶 的 能力 。 汽 车操纵稳 定性 作为汽车 动力学 的一个 重要分支 , 对 汽车 驾驶起 着 非常重 要 的作用 。在汽 车 的设计研 发过 程 中 ,对 操 纵稳 定性能 的评价 主要 采用 实车试 验评 价方 性 能参 数 【。 2 J
2 、整车模型 的建立
动力学仿真分析软件 ,它使用交互式 图形环境和零件
库 、约 束 库 、力库 ,创建 完 全参 数化 的机械 系 统几 何模
图 1整车模型 的建模 过程
型, 它对虚拟机械系统进行静力学 、 运动学和动力学分 析 ,输 出位 移 、速 度 、加速 度和 反作用 力等 曲线 , A A S软件 的仿真可用于预测机械系统的性能、 D M 运动 范围、 碰撞检测 、 峰值载荷 以及计算有限元 的输入载荷 等。它为用户提供 了强大的建模、仿真和分析功能。
F - — H-
—
} { {
一
f
ff = = 千1
{ ; j ; f { l 『
{ f { f 1 } i —
II_ ~ ’ — - -
。 一 h~
— I —~ f 一 _ 。
/ /
一 — —
汽车横摆角速度的瞬态响应 曲线如下 图 6 所示 。
r 一 一 - —} L - ’十I - 卜 Ik 一 — 十 ~}
汽车的操纵稳定性分析和评价指标

32
以上分析可知: 具有适度不足转向的汽车具有良好的操作稳定性; 过度的不足转向会加剧轮胎的磨损。
FY k
k—侧偏刚度。
FY一定时希望侧 偏角越小越好,所 以 |k| 越大越好。
(1)扁平率小,k大 (2)垂直载荷大,k大 (3)轮胎气压高,k大
垂直载荷过 大时,轮胎与 地面接触区的 压力分布不均 匀,使 k反而有 所减小。
18
α一定时, W大,FY大。
FY = k ,即k 大。
19
(3)轮胎气压高,k大
20
(4)FX 越大,FY 越小
FY1
FY2
FX2
FX1
21
(5)路面干湿状态
22
轮胎胎面、路面粗糙程度、水层厚度与滑水现象的关系
转向油泵
转向减振器 转向直拉杆 转向器 转向摇臂
转向横拉杆
转向油管 转向控制阀
转向节臂
3
4
5
操纵稳定性的研究方法
将汽车作为开路控制系统 人—汽车系统作为闭路系统
6
操纵稳定性的两种试验评价方法
开路系统
人—汽车闭路系统
客观评价法
主观评价法
通过仪器测出横摆角 速度、侧向加速度、侧 倾角及转向力。
让试验评价人员根 据试验时自己的感觉 进行评价。
7
4.1 汽车的转向特性
➢轮胎的侧偏特性 ➢汽车的转向特性
一、轮胎的侧偏现象和侧偏力—侧偏角曲线 1.侧偏力FY
地面作用于车轮的侧向反作用力。
8
1)在刚性轮上作用侧向力 F y
c
c
u
u
u'
第二章 操纵稳定性分析

第二章操纵稳定性分析1.汽车操纵稳定性是指在驾驶着不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过汽车转向系及转向车轮给定的方向驾驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力,是汽车动力学的一个重要分支。
操纵性:稳定性反映的是汽车能够遵循驾驶者通过转向系及转向车轮给定的方向行驶的能力。
稳定性:稳定性反映的是汽车在遭遇到外界干扰情况下产生抵抗外界干扰而保持稳定行驶的能力。
2.操纵稳定性的评价指标:稳态转向特性、瞬态响应特性、回正性、转向轻便性、典型行驶工况性能和极限行驶能力等。
仿真时测量变量包括汽车横摆角速度、车身侧倾角、汽车侧向加速度等。
3.汽车操纵稳定性的实验方法(1)Open-Loop Steering Events---开环转向事件1)Ddift---漂移实验2)Fish-Hook---鱼钩转向3)Impulse Steer---转向脉冲输入4)Ramp-Steer---转向斜坡输入5)Single Lane Change---单移线试验6)Step Steer---转向阶跃输入7) Swept-Sine Steer---转向正弦扫频输入(2)Cornering Events---转弯事件1)Braking-In=Turn---转弯制动2)Constant-Radius Cornering---定半径转弯(稳态回转试验)3)Cornering w/Steer Reiease---方向盘撒手转弯(转向回正试验)4)Lift-Turn-In---松油门转弯5)Power-Off Cornering---发动机熄火转弯(3)Straight-Line Events---直线行驶事件1)Acceleration---加速试验2)Braking---制动试验3)Braking on split μ---左右车轮不同路面制动试验4)Maintain---直线稳定试验5)Power-Off Straight Line---发动机熄火直线行驶(4)Course Events---ISO路线行驶1)ISO Lane Change---ISO路线行驶2)3D Road---三维路面行驶(5)Static Quasi-Static Maneuvers---准静态操纵仿真1)Quasi-Static Constant Radius Cornering---准静态定半径转弯2)Quasi-Static Constant Velocity Cornering---准静态恒速转弯3)Quasi-Static Force-Moment Method---准静态力-力矩方法4)Quasi-Static Straight-Line Acceleration---准静态直线加速第三章客车侧倾稳定性试验仿真建模及设计3.1 ADAMS的建模思路3.1.1 ADAMS的软件介绍及理论基础;3.1.2 ADAMS/Car的建模思路;3.2 前悬架动力学模型的建立(双横臂悬架);3.2.1 双横臂悬架的结构和工作原理;3.2.2 双横臂悬架子系统与转向系统的建立;3.3 后悬架动力学模型的建立(空气悬架)3.3.1 空气悬架的结构和工作原理;3.3.2 不同空气弹簧型式的特点分析;3.3.3 空气弹簧的建立;3.3.4 减震器模型和各轴套的建立;3.3.5 横向稳定杆的建立;3.4 轮胎特性参数的确定;3.5 其他子系统动力学模型的建立3.5.1 制动系统的建立;3.5.2 动力总成及车身的建立;3.6 客车质心位置及个总成部件质量的确定;第四章客车动态侧倾稳定性试验仿真实例及分析4.1 客车动态侧倾稳定性试验方法1)固定转弯半径变车速试验 2)固定车速变转向角试验3)稳态回转试验4)蛇行试验5)转向瞬态响应6)单移线实验4.2 客车动态侧倾稳定性的仿真分析1)客车定半径变车速试验仿真2)客车定车速变转向角试验仿真。
虚拟样车操纵稳定性分析
5虚拟样车操纵稳定性分析5.1引言汽车操纵稳定性是指在驾驶者不感到过分紧张、疲劳的条件下,汽车按驾驶者通过汽车转向系及转向盘所确定的方向行驶,且当遭到外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力,是汽车动力学的一个重要分支。
如何研究和评价汽车的操纵稳定性能,以获得良好的汽车动力学性能一直是关于汽车的最重要的课题。
汽车的操纵稳定性包括相互联系的两个部分,一是操纵性;一是稳定性。
操纵性是指汽车能够确切的响应驾驶员转向指令的能力。
稳定性是指汽车受外界扰动(路面扰动或忽然阵风扰动)后恢复原来运动状态的能力。
两者很难断然分开,稳定性的好坏直接影响操纵性的好坏,因此通常通称为操纵稳定性。
操纵稳定性的评价也因此分为开环评价和闭环评价。
所谓开环评价即是把汽车本身看作一个控制系统,分析和研究汽车的运动特性,通过表征汽车运动特性的响应参数对汽车的操纵稳定性进行评价。
开环评价中,一般是给转向盘一个规则输入,测量汽车的响应参数,并以此作为评价系统好坏的指标。
然后,根据系统具有良好性能的标准进行比较评价,如ESV的评价方法和ISO的试验评价方法等。
闭环评价考虑到驾驶员特性与汽车特性的配合问题。
对于闭环评价模型来说,就要包含汽车动力学模型、驾驶员模型和道路模型。
建立驾驶员—车辆闭环系统。
虽然试验得到的人—车闭环系统的性能能更真实地反映了汽车的操纵稳定性能,由于驾驶员模型的建立对试验结果有着较大的影响,汽车操纵稳定性分析仍然离不开开环评价。
在产品开发阶段,广泛应用的理论分析对象仍然只能是开环系统汽车操纵稳定性分析。
在评价操纵稳定性的指标有多个方面,例如稳态转向特性、瞬态响应特性、回.正性、转向轻便性、典型行驶工况性能和极限行驶能力等。
仿真时测量变量包括:汽车横摆角速度、车身侧倾角、汽车侧向加速度等。
我们选择了稳态回转试验、转向盘角脉冲输入下的瞬态响应、转向轻便性三种工况下样车的反应来考察车辆模型的操纵稳定性。
对于试验结果的评价。
汽车操纵稳定性控制系统的分析

汽车操纵稳定性控制系统的分析【摘要】汽车操纵稳定性的研究,是与汽车车速的不断提高分不开的。
早期的低速汽车,还谈不上操纵稳定性问题,最早提出操纵稳定性问题,是在具有较高车速的赛车上。
后来,随着车速的不断提高,在轿车、大客车和载货汽车上也都不同程度地出现了类似的问题。
因此汽车操纵稳定性的研究成为当今研究热点。
本文从国内外汽车操纵稳定性控制的研究现状出发,对汽车操纵稳定性进行仿真分析。
【关键词】汽车操纵稳定性控制仿真一、汽车操纵稳定性研究的目的及意义随着高速公路的发展和汽车技术的进步,公路交通呈现出行驶高速化、车流密集化的趋势。
现代轿车的设计最高时速一般都大于200km/h,有的运动型轿车甚至超过300km/h。
汽车在高速公路上的行驶速度通常也都在lookm/h,其次驾驶员的非职业化发展趋势,使得车辆在高速行驶时出现了各种各样的稳定性问题。
要求汽车具有更好的可控性和更高的行驶安全性。
因此,汽车的操纵稳定性日益受到重视,成为现代汽车研究的重点。
二、国内外研究现状国外发达越来越多的车型已将电子稳定性控制系统作为其标准配置2005年大约40%的新注册车辆配备了esp,在高档车上,esp 已经成为了标准配置,中档车上的装配率也迅速提高,在紧凑型车上装配率稍低。
国内对汽车操纵稳定性控制的研究起步较晚,目前仍然处于研究开发的初期,没有具备自主知识产权的产品。
电子稳定性控制系统的装配率还比较低,以往通常只在高档车上才装配esp,2006年上市的东风雪铁龙的凯旋、一汽大众的速腾和上海通用的君越都配有esp[141,但是装备的都是国外公司的产品,国内还没有自己的实际开发系统的能力,大多数学者只是基于理论的研究。
三、车辆操纵稳定性控制的基本原理及分析汽车电子稳定控制的基本思想是通过对临界稳态工况的控制,来阻止汽车进入不可控的非稳态,此时汽车的质心侧偏角往往较大,车轮的侧向力已接近轮胎与路面的附着极限,此时方向盘转角控制对车辆稳定性的改善并不明显,所以一般不使用方向盘转角控制,可以采用通过纵向力匹配来产生横摆力矩的控制方法来改善车辆稳定性。
FSEC赛车整车操控稳定性分析与研究
FSEC赛车整车操控稳定性分析与研究摘要:基于Adams平台,建立了FSEC赛车的整车虚拟样机,结合FSEC赛事的赛道工况,按照国家对汽车操控稳定性的评价方法,主要以开环评价方式,进行了稳态回转试验、转向盘角阶输入试验、蛇形绕桩试验、脉冲转向试验,分析了赛车转向梯度、瞬态响应特性、侧向加速度、车身侧倾等,并通过改变设计参数,迭代仿真,最优化了赛车操控稳定性。
关键词:操控稳定性;Adams;FSEC;仿真1 引言结合大多数专家对汽车性能的评价,可将车辆的性能分为三个主要指标,分别是驾驶性、操控性和乘坐舒适性[1],在日常生活的汽车中,驾驶性和舒适性,无疑是驾驶员最容易和经常感受的,而操控性,一般情况在驾驶员驾车比较激烈的状态,才能真正地感受和评价车辆是否能按照自己的驾驶意愿行驶。
一辆赛车,设计的初衷是竞赛,势必激烈,因此操控性也就成了赛车设计的重点,一辆具有良好操控性的赛车,才可以真正意义地做到“人车合一”。
本文利用多体动力学Adams软件,对前期设计做进一步仿真优化,提高赛车的操控稳定性。
2 整车虚拟样机建立Adams/Car软件有两种模式,一种是标准用户模式,适合设计人员和试验工程师使用,可利用Adams数据库,轻易生成子系统和装配,并按照汽车试验标准提供了仿真环境,所有仿真必须在此模式下进行;另外一种是专家用户模式,允许用户建立新的模板,适合有经验的用户,因为模板的建立需要理解汽车每一部分相互连接的拓扑关系,建立相互连接的子系统通讯关系,拓扑关系和通讯关系建立错误、过约束或者欠约束,都将导致模型出错,难以查找问题所在[2]。
本文是通过修改MSC公司为学生车队提供的学生方程式模板,把前期设计的参数输入,并检查相关的拓扑关系是否和模板有差异进而进行相应的修改。
模型建立的关键是要确认模型是否符合自己期望,所以仿真前,需要确认整车质量、质心高度、弹簧刚度、结构关系、系统之间的匹配[3]。
FSEC赛车的虚拟样机如图2.1,FSEC赛车的相关设计参数如表2.1。
adams整车操纵稳定性报告
目录1任务来源 (1)2分析目的 (1)3模型建立 (1)3.1整车模型的简化 (1)3.2各子系统的简化 (1)3.3各部件之间的运动副的施加 (9)4前悬架轮跳仿真 (11)5操纵稳定性分析 (15)5.1操纵稳定性的目的与意义 (15)5.2转向盘角阶跃仿真试验 (15)5.3稳态回转的评价 (19)5.4转向盘角脉冲输入试验评价 (23)5.5转向轻便性实验: (26)5.6转向回正性 (28)5.7蛇形实验 (30)6结论 (32)1.任务来源根据QQ车型协议书及相关输出要求,需要对QQ车操纵稳定性能进行运动学仿真分析。
2 分析目的汽车操纵稳定性是汽车的重要性能之一,通过ADAMS软件进行仿真分析,依据国家标准对QQ车的操控性能进行评分,从而对QQ整车的操控性能进行合理的评价,为设计部门提供参考。
3 模型建立3.1整车模型的简化汽车是一个极其复杂的多体系统,要将每个零部件纳入到仿真模型中进行计算是不必要的,同时也是对计算资源的一种浪费,仿真技术一直以来只是考虑所关心的部分,对不关心的部分或对整个仿真过程影响很小的部分,一般是忽略,车辆的动力学仿真模型也同样沿用了这种思路。
在ADAMS的动力学模型中,对无相对运动关系的两个部件处理为一个部件,ADAMS是一个多刚体动力学分析软件,其将变形对分析结果影响不太重要的部件一律按刚体处理,刚体计算只考虑质量特性与连接关系,刚体的形状对分析无影响。
1.除轮胎,阻尼元件,弹性元件外,其余部件全部采用刚体,为操纵稳定性及平顺性分析所建立的动力学分析模型主要是考虑底盘各个系统之间的运动关系,对车身简化为一刚性球体。
板簧与横向稳定杆等弹性元件采用柔性体处理。
2.发动机采用ADAMS自带的发动机模块,动力传动系统考虑的是半轴之后的部分。
3.底盘与车身或车架连接部分全部采用衬套连接。
3.2各子系统的简化本次分析在ADAMS/CAR中建立得整车模型主要包括以下几个子系统:前悬架、后悬架、前轮胎、后轮胎、转向系统、动力系统、制动系统、车身。
汽车操纵稳定性和平顺性的仿真研究

科研训练文献阅读综述题目:汽车操纵稳定性和平顺性的仿真研究姓名:学号:专业:班级:指导老师:时间:第一章整车操纵稳定性试验仿真分析本章节,在前悬架优化的基础上建立整车模型。
整车进行转向回正试验、转向轻便性试验、稳态回转试验,并根据国标计分评价。
1.1转向回正试验仿真分析转向回正试验是研究汽车瞬态响应特性的一种重要试验方法,尤其是研究汽车能否恢复直线行驶能力的一种重要试验方法,汽车的转向回正表达了汽车的自由控制运动特性,其实质是一种力阶跃输入试验。
国标 GB/T6323.4-94对试验做出了相关规定。
低速回正试验在半径为15m圆周上侧向加速度达到4m/s^2,,然后然放松转向盘,记录汽车的状态。
由于该重货车最高车速为90km/h,按照国标规定不需要进行高速转向回正试验。
对于侧向加速度达不到4士0.2m/s^2的汽车,按试验汽车所能达到的最高侧向加速度进行试验。
试验按向左与向右两个方向进行,每个方向三次[1].1.1.1仿真曲线:仿真中设定圆弧半径为15m,要达到4士0.2m/s的侧向加速度车速必须大于7.746m/s^2。
左转低速转向回正试验具体仿真结果如下(右转仿真结果略):1.1.2仿真结论:对于虚拟样车系统,回正特性的主要参数根据国标GB/T6323.4-94规定的转向回正试验要求计算,结果见表6-1。
1.2转向瞬态响应试验(转向盘转角阶跃输入)仿真分析瞬态转向特性是指汽车在受到外界扰动下,达到稳态状态前表现出来的特性,瞬态转向特性是汽车最重要的性能之一,是评价汽车高速行驶安全性的一个重要指标。
1.2.1试验方法:具体做法参照国标GB/T6323.2-1994。
试验车速按被测汽车最高车速的70%并四舍五入为10的整数倍确定。
该重型货车最高车速为90KM/h,所以试验车速取6Okm/h。
试验中转向盘转角的预选位置(输入角),按稳态侧向加速度值1-3m/s^2确定,从侧向加速度为lm/s^2做起,每间隔0.5m/m^2进行一次试验。
汽车操纵稳定性虚拟仿真研究的开题报告
汽车操纵稳定性虚拟仿真研究的开题报告
一、研究背景:
随着社会经济的快速发展,汽车已经成为现代社会中不可缺少的交通工具。
然而,随着这种便利的交通方式的普及,一些汽车安全问题也逐渐浮现。
其中,操纵稳定性
问题是影响车辆安全性的重点之一。
为了解决这个问题,研究汽车操纵稳定性虚拟仿
真技术,成为当前汽车安全研究领域的一个热点。
二、研究意义:
本研究拟通过建立汽车操纵稳定性虚拟仿真模型,对汽车操纵性能进行分析和优化。
在车辆开发、评价和测试中,可以采用虚拟仿真技术,降低了车辆开发的成本和
周期,提高了开发效率和安全性。
同时,这也为国内汽车制造业提供了技术上的支持。
三、研究内容:
本研究的核心是建立汽车操纵稳定性虚拟仿真模型,研究包括以下内容:
1. 基于车辆动力学和控制原理建立汽车操纵稳定性的计算模型,包括车辆运动学学理论和动力机械原理等。
2. 建立汽车操纵稳定性的虚拟测试平台,包括根据实际车辆特性的虚拟测试环境,以及实时与虚拟环境中采集数据的接口。
3. 基于虚拟测试环境进行仿真试验,通过试验结果对汽车操纵性能进行判定和改进。
四、研究方法:
本研究将采用计算机虚拟仿真技术,在建立汽车操纵稳定性虚拟仿真模型和虚拟测试平台的基础上,进行虚拟试验。
根据试验结果,对车辆操纵性能进行优化和改进。
五、预期成果:
本研究的预期成果包括建立汽车操纵稳定性虚拟仿真模型,搭建虚拟测试平台,进行基于虚拟仿真试验,发现和改进汽车操纵性能问题。
同时,本研究的成果也将为
汽车制造业提供技术支持,并对于汽车安全研究领域的发展产生积极的推动作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L11整车操纵稳定性仿真分析报告(HB11A/HB12A)编制(日期)校对(日期)审核(日期)批准(日期)简式国际汽车设计(北京)有限公司L11整车操纵稳定性仿真分析报告(HB11A/HB12A)1.定半径稳态圆周试验试验方法HB11A处于满载状态,沿半径为40m的定半径圆周进行回转运动,开始以最低稳定速度进入圆周,找准方向盘的位置,使汽车可以沿圆周进行回转运动,开始记录,然后缓慢连续而均匀地加速(纵向加速度不超过 m/s2),加速的同时调整方向盘转角以维持定半径圆周运动,这个过程中车辆不应超出车道 m,直至不能维持稳态定半径圆周运动条件时或受发动机功率限制所能达到的最大侧向加速度为止。
记录整个过程,建议使用满足试验条件的最高档位。
试验按向左转和向右转两个方向进行,每次试验开始时车身应处于正中位置。
数据处理不足转向梯度“方向盘转角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。
左转图1 方向盘转角—侧向加速度(左转)从图1 计算得到左转不足转向梯度为137o/g右转图2 方向盘转角—侧向加速度(右转)右转不足转向梯度为g,则HB11A平均不足转向梯度为g。
不足转向梯度/转向系角传动比HB11A的角传动比约为,则不足转向梯度/转向系角传动比为g。
侧偏角梯度“质心侧偏角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。
左转图3 质心侧偏角——侧向加速度(左转)左转侧偏角梯度为g。
右转图4 质心侧偏角——侧向加速度(右转)右转侧偏角梯度为g,则HB11A平均侧偏角梯度为g。
侧倾角梯度“车身侧倾角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。
左转图5 车身侧倾角——侧向加速度(左转)左转侧倾角梯度为g。
右转图6 车身侧倾角—侧向加速度(右转)右转侧倾角梯度为g,则HB11A平均侧倾角梯度为g。
2.方向盘转角阶跃输入试验试验方法HB11A处于满载状态,以70km/h的车速稳定直线行驶,开始记录数据,以尽可能快的速度(阶跃时间为转动方向盘,达到预定的转角,保持方向盘转角不变直至汽车恢复稳定状态,试验过程中油门踏板开度应尽可能保持不变。
方向盘转角初始值是10°,每次增加5°,直到车辆达到附着极限,试验分为向左、向右两个方向进行。
数据处理横摆角速度—方向盘转角滞后时间横摆角速度达到50%稳态值时相对于方向盘转角达到50%阶跃值时的滞后时间。
稳态侧向加速度为时图7 时横摆角速度—方向盘转角滞后时间左转时,横摆角速度——方向盘转角滞后时间为右转时,横摆角速度——方向盘转角滞后时间为HB11A横摆角速度——方向盘转角平均滞后时间为稳态侧向加速度为时图8 时横摆角速度—方向盘转角滞后时间左转时,横摆角速度——方向盘转角滞后时间为;右转时,横摆角速度——方向盘转角滞后时间为;HB11A横摆角速度——方向盘转角平均滞后时间为。
侧向加速度——方向盘转角滞后时间侧向加速度达到50%稳态值时相对于方向盘转角达到50%阶跃值时的滞后时间。
稳态侧向加速度为时图9 时侧向加速度——方向盘转角滞后时间左转时,侧向加速度——方向盘转角滞后时间为;右转时,侧向加速度——方向盘转角滞后时间为;HB11A侧向加速度——方向盘转角平均滞后时间为。
稳态侧向加速度为时图10 时侧向加速度——方向盘转角滞后时间左转时,侧向加速度——方向盘转角滞后时间为;右转时,侧向加速度——方向盘转角滞后时间为;HB11A侧向加速度——方向盘转角平均滞后时间为。
侧倾角——方向盘转角滞后时间车身侧倾角达到50%稳态值时相对于方向盘转角达到50%阶跃值时的滞后时间。
稳态侧向加速度为时图11 侧倾角——方向盘转角滞后时间左转时,侧倾角——方向盘转角滞后时间为;右转时,侧倾角——方向盘转角滞后时间为;HB11A侧倾角——方向盘转角平均滞后时间为。
稳态侧向加速度为时图12 侧倾角——方向盘转角滞后时间左转时,侧倾角——方向盘转角滞后时间为;右转时,侧倾角——方向盘转角滞后时间为;HB11A侧倾角——方向盘转角平均滞后时间为。
侧偏角——方向盘转角滞后时间质心侧偏角达到50%稳态值时相对于方向盘转角达到50%阶跃值时的滞后时间。
稳态侧向加速度为时图13 侧偏角——方向盘转角滞后时间左转时,侧偏角——方向盘转角滞后时间为;右转时,侧偏角——方向盘转角滞后时间为;HB11A侧偏角——方向盘转角平均滞后时间为。
稳态侧向加速度为时图14 侧偏角——方向盘转角滞后时间左转时,侧偏角——方向盘转角滞后时间为;右转时,侧偏角——方向盘转角滞后时间为;HB11A侧偏角——方向盘转角平均滞后时间为。
3.转向回正性能试验试验方法HB11A处于满载状态,沿半径为20m的圆周行驶,调整车速,使侧向加速度达到4±/s2,固定转向盘转角,稳定车速并开始记录,驾驶员突然松开转向盘,至少记录松手后4s的汽车运动过程。
记录时间内油门开度保持不变。
试验按向左转与向右转两个方向进行,每个方向三次。
数据处理车辆轨迹图15 车辆轨迹侧向加速度时间历程图16 侧向加速度时间历程车速及油门开度时间历程图17 车速及油门开度时间历程横摆角速度评价图 18 横摆角速度变化曲线残留横摆角速度松开方向盘3s时刻的横摆角速度值(包括0值)。
左转时,残留横摆角速度为s;右转时,残留横摆角速度为s;HB11A平均残留横摆角速度为s。
横摆角速度超调量横摆角速度响应第一个峰值超过新稳态值的部分与初始值之比。
左转时,横摆角速度超调量为%;右转时,横摆角速度超调量为%。
HB11A平均横摆角速度超调量为%。
横摆角速度自然频率f——横摆角速度自然频率,Hz式中:j A ——横摆角速度响应时间历程曲线的峰峰值,(o )/sj t ∆——横摆角速度响应时间历程曲线上两相邻波峰的时间间隔,sn ——横摆角速度响应时间历程曲线的波峰数 左转时,横摆角速度自然频率为; 右转时,横摆角速度自然频率为; HB11A 平均横摆角速度自然频率为。
横摆角速度相对阻尼系数衰减率∑==nj jAA D 11'式中:1A ——横摆角速度响应历程曲线的第一个峰峰值,(o )/s可得相对阻尼系数1])1ln([12'+-=D πξ左转时,横摆角速度相对阻尼系数为; 右转时,横摆角速度相对阻尼系数为; HB11A 平均横摆角速度相对阻尼系数为。
横摆角速度总方差式中:r E ——横摆角速度总方差,s i r ——横摆角速度响应时间历程曲线瞬时值,(o )/s 0r ——横摆角速度响应初始值,(o )/sn ——采样点数Δt ——采样时间间隔,s左转时,横摆角速度总方差为; 右转时,横摆角速度总方差为; HB11A 平均横摆角速度总方差为。
4.中间位置转向试验试验方法HB11A处于满载状态,以70km/h的固定车速直线稳定行驶,以的频率进行连续的正弦曲线方向盘转角输入,产生的最大侧向加速度为,正弦输入以外的过程中要始终保持方向盘转角不变,试验过程中,转向角最大幅度和方向盘中心位置的角速度应尽可能稳定。
此外,油门踏板位置变化应保持最小,与车速限值要求保持一致。
数据处理侧向加速度—方向盘转角图19 侧向加速度—方向盘转角转向灵敏度:方向盘最大转角的±20%范围内的曲线平均斜率,为o最小转向灵敏度:侧向加速度在±范围内内的曲线最小瞬间斜率,为o。
侧向加速度为时的转向灵敏度:远离转向中心侧向加速度为时的曲线斜率,为o。
转向线性度:最小转向灵敏度与侧向加速度时的转向灵敏度的比值,为。
转向迟滞:在侧向加速度为±范围内的曲线区域面积,为·g方向盘平均转角静态区:转向迟滞除以,为。
横摆角速度——方向盘转角图20 横摆角速度——方向盘转角横摆角速度响应系数:方向盘最大转角的±20%范围内的曲线平均斜率,为 1/s。
5.扫频试验试验方法HB11A处于满载状态,以70km/h车速稳定直线行驶,开始记录数据,给方向盘转角正弦扫描输入,频率范围从到4Hz连续变化,转向幅度使侧向加速度峰值达到,试验过程中油门开度保持不变。
数据处理侧向加速度v—方向盘转角图21 侧向加速度v—方向盘转角初始增益为o,最小增益频率为。
横摆角速度—方向盘转角图22 横摆角速度—方向盘转角初始增益为 1/s,最大增益频率为,放大率为侧偏角—方向盘转角图23 侧偏角—方向盘转角初始增益为,最大增益频率为,放大率为。
侧倾角—侧向加速度图24 侧倾角—侧向加速度初始增益为g。
6.平顺性脉冲输入试验试验方法采用如图25所示三角形状的凸块作为脉冲输入,将凸块放置在试验道路(干燥平整长直的水泥路面或者沥青路面)中间,并按汽车轮距调整好两个凸块间的距离,为保证汽车左右车轮同时驶过凸块,应将两凸块放在与汽车行驶方向垂直的一条线上。
图25 三角形状的凸块示意图图25中:h ——80mm;B ——按需要而定,但必须大于轮宽。
HB11A处于满载状态,分别以10、20、30、40、50、60km/h的实验车速直线匀速驶过凸块,在汽车通过凸块前50m应稳住车速和方向盘,并启用测速装置测量车速。
当汽车前轮接近凸块时开始记录,待汽车驶过凸块并冲击响应消失后,停止记录。
数据处理各测点在不同车速下的最大垂直加速度的绝对值如表1所示:表1不同车速下的最大垂直加速度7.仿真试验结果汇总表2仿真试验结果汇总表平顺性脉冲输入试验结果曲线拟合(1)驾驶员座椅处最大垂直加速度的绝对值——车速图26 驾驶员座椅处最大垂直加速度—车速(2)驾驶员底部地板处最大垂直加速度的绝对值——车速图27 驾驶员底部地板处最大垂直加速度—车速(3)货箱地板中心处最大垂直加速度的绝对值——车速图28 货箱地板中心处最大垂直加速度—车速(4)货箱地板距前边板、左边板各300mm处最大垂直加速度的绝对值——车速图29货箱地板距前边板、左边板各300mm处最大垂直加速度—车速(5)货箱地板距前边板、右边板各300mm处最大垂直加速度的绝对值——车速图30 货箱地板距前边板、左边板各300mm处最大垂直加速度—车速(6)货箱地板距后边板、左边板各300mm处最大垂直加速度的绝对值——车速图31 货箱地板距后边板、左边板各300mm处最大垂直加速度—车速(7)货箱地板距后边板、右边板各300mm处最大垂直加速度的绝对值——车速图32 货箱地板距后边板、右边板各300mm处最大垂直加速度—车速8.结论本仿真模型中,轮胎、衬套等对操纵稳定性和平顺性有重要影响的参数未能获取,只能以较接近的经验数据代替;后桥板簧仅复现了主副簧刚度,并未考虑片间摩擦;整车转动惯量无法应用SAE经验公式估算,只能人为按数量级近似。