进给系统Adams和Simulink联合仿真
基于ADAMS与Simulink的汽车ABS控制联合仿真
行参 数 的修 改 和调 节 , 后建 立 相应 的子 系统 , 然 最
人 的经 验 知识 、 鲁棒 性 好 、 简单 实 用 等 优点 , 现 是
明 A S 糊控 制系 统在整 车制动过 程 中能够 得 到 B模 比较满 意 的防抱死效 果 。
型 中使用 了较 多衬 套 ,充 分考 虑 了前后 悬 架 与各 机构 间 的非线性 关 系 以及 动力 系统 悬 置 和转 向 系 统悬 置 刚度 的影 响 。为 了实 现 车辆 制 动力 控制 的 需要 , 对制 动系统 设置 了输人 、 出参数 来 模拟 制 输 动液压 系统 的增 压 、 减压 、 保压 等操作 。
在 A S控 制 中的 比较 优 秀 的算 法 , 内很 多科 研 B 国
后 将 所 有 已创 建 的 子 系 统 装 配 成 目标 虚 拟 样 机 … 。建 成 的虚拟样 机包 含底 盘 、 后悬 架 、 力 前 动 总成 、 向 系 、 动 系 以 及 轮 胎 , 图 I所 示 。整 转 制 如
单 位都对 其进行 了 比较 深人 的研 究 。然 而 由于在 M T A / i uik中建 立汽 车 整车 模 型 是一 个 非 A L B Sm l n
常 繁琐 和 困难 的事 情 , 因此 大 部 分 研 究 采 用 的 是
车模 型 的前悬 架 为麦 弗 逊悬 架 ,后悬 架 为 双横 臂
基于 A A D MS与 S lk 汽车 A S控 制联 合 仿 真 i i 的 mun B
李志 高 薛 亮 钟 绍 华 ( 武汉理工大学汽车工程学院, 武汉 40 C 动力 学模型, 并在M TA/ mlk A LB un 中设计基于滑移率的A S i B 模
联合仿真过程

Adams与Simulink联合仿真过程使用Adams与Simulink联合仿真,这里我使用的是Adams2010版本中的View模块建立的二自由度四分之一主动悬架模型,建立的模型如图1.1 所示:图2.1 使用Adams建立二自由度四分之一主动悬架模型建立完成悬架模型后要进行数据的导出来方便与Simulink联合仿真,下面是具体步骤:1.定义输入和输出变量Adams与MATLAB之间的相互通信是通过状态变量来实现的,因此为了使两者顺利通信,就要将模型的输入和输出变量定义为状态变量。
在Adams_View的菜单栏中选择Buid中的System Elements下拉菜单栏中的State Variable-New 选项,在弹出的创建新状态变量的对话框中,定义输入变量input,定义的输入变量input是通过在上一节中创建的测试平台与大地之间的驱动MOTION-1输入到悬架系统中去的。
右键单击MOTION-1,并选择Modify选项,修改函数为:VARVAL(.suspension_1.input),修改参数设置对话框如图1-2所示:同理按照上面的方法设置输入变量并命名为force,设置作动器U,将其函数修改为VARVAL(.suspension_1.force).参数设置对话框如图1-3所示:图1-2直线驱动参数设置对话框图1-3力参数设置对话框2.定义输出变量在定义输出变量之前首先要创建三个MARKER点,它们依次与簧载质量质心、非簧载质量质心、测试平台质心的位置重合,然后定义三个输出变量,它们分别为车身垂直加速度(body acceleration)、悬架动行程(suspension working space)、轮胎动变形(dynamic tyre deformation)。
定义三个输出变量的函数表达式分别为:ACCY(m b.cm,MARKER17,m b.cm)DY(m b.cm,MARKER17,m b.cm)−DY(m w.cm,MARKER18,m w.cm)DY(m w.cm,MARKER18,m w.cm)-DY(Test_Patch.cm,MARKER_19,Text_Pacth.cm )。
基于ADAMS和SIMULINK

机械系统仿真
-仿真及分析 -显示系统的运动
传统设计流程中,机械部分设计通常独立于系统的其它部分进行CAD/CAE设计分析。
机械、液压和电气的统一设计分析是现代设计的发展趋势。
ADAMS是美国MDI公司开发的非常优秀的机械系统 动力学仿真分析软件现已广泛地应用于航空航天、汽 车机械制造业等领域,用它建立的系统虚拟模型能更 接近实际的物理模型,这为以后的物理样机试验提供 了更为可靠的依据。通过CAD软件SOLIDEDGE建立 比较精确的3D模型,利用通用接口导入ADAMS中, 并进行响应处理,建立了虚拟模型。利用ADAMS的 CONTROL控制模块与MATLAB接口进行机电液联合 仿真。
1.在ADAMS中建立机械三维模型 2.定义输入输出变量并导出模块 3.在SIMULINK中建立控制模型 4.二者结合,进行联合仿真
Hale Waihona Puke -创建机械模型 -定义控制输入以及仿真输出
-创建控制模型 -导入ADAMS模块
导入模型 创建.m和.inf格式文件
控制系统的设置
-连接输入输出至控制框图 -进行联合仿真
adams和simulink联合仿真的案例分析
相信大家在联合仿真ADAMS和SIMULINK时都会遇到很多的问题:ADA MS/contro中的例子ball_beam通过联合仿真,更容易理解a dams和simulink的联合仿真精髓。
小球在一脉冲力的作用下沿着横梁滚动,此时梁的两端受力不平衡,梁的一段倾斜,为了使得小球不掉下横梁,在横梁上施加一个绕Z轴的力矩,横梁达到一定的角度之后逆向转动,然后小球就在这个作用力矩的控制下来回滚动而不掉下横梁!其中控制力矩在整个过程中是个动态变化的,力矩Torque_In是通过位移Position 和横梁转角Bea m_Angle确定,这个是在simulink中通过框图完成的。
首先我申明一下我用的是adams2003和matlab6.5以下我说明一下我的操作步骤:1、把control中的ball_beam文件copy到另外一个文件夹下,同时设置adams和matlab的默认路径即为ball_beam文件夹,这样可以省略很多不必要的麻烦!2、用aview打开ball_beam.cmd文件,先试试仿真一下,可以看到小球会在脉冲的作用下滚动,仿真时间最好大于8s3、载入control模块,点击tools|plugin manager在contro l框选定。
4、点击control|plant export在file prefix下输入你的文件名,这个可以随便的,我输入的是myball,在plant input点击右键点击guess选定tmp_MDI_PINPUT,在tmp_MDI_PINPUT 中就是输入力矩Torque_In,只有一个输入参数;同样在plant output中点击右键guess选定tmp_MDI_POUTPUT,这是模型的输出变量横梁转角Beam_Angle和小球与横梁中心轴的距离position。
controlpackage选择matlab,type是non_linear,初始化分析选择n o,然后按ok!此时m文件已经生成了!5、打开matalb,设置你的工作路径在ball_beam文件夹上,键入myball,马上有%%% INFO : ADAMS plant actuators names :1 Torque_In%%% INFO : ADAMS plant sensors names :1 Beam_Angle2 Position出现6、再键入adams_sys,弹出一个控制框图,这时可以新建一个mdl文件,将adams_sub拖入你新建的mdl框图中,其实再这里有一个偷懒的办法,就是在matlab中打开ball_beam.md l文件,然后把他的那个adams_sub用你的刚产生的这个代替,然后另存为my_ball.mdl!7、设置仿真参数,在你刚建立的my_ball.mdl框图上的simul ation parameter里设置一下stop time为10s,步长为ode1 5s。
基于ADAMS与Simulink的机电一体化系统联合仿真
基于ADAMS与Simulink的机电一体化系统联合仿真Co-simulationofMechatronicsSystemBasedonADAMSandSimulink任远白广忱(北京航空航天大学能源与动力工程学院,北京100083)摘要:以雷达天线为研究对象,针对天线的方位角控制问题在ADAMS和Simulink的基础上进行了机电一体化仿真研究。
首先利用ADAMS/Controls模块把MATLAB/Simulink与雷达天线样机模型连接在一起,然后分别采用PID算法、PD算法以及模糊理论这3种方法来建立天线方位角控制系统。
仿真结果表明,对于雷达天线这样一个输入输出特性比较复杂且不便于简化建模的受控对象(因为不能忽略天线支撑的柔性及其扭振),模糊控制比前两种经典控制算法更为有效。
关键词:联合仿真雷达天线方位角控制模糊控制doi:10.39690.issn.1007-080X.2009.06.002Abstract:Takingaradarantennaa8researchobjective.themechatronicssimulationbasedonADAMSandSim曲nkWaScarriedouttosolvetheproblemofcontrollingtheantennaazimuth.111evirtualprototypeoftheradarantennawsgcoilnectedtoMATLAB/SimulinkbyADAMS/Controls.Thenthreemethods,i.e.PID,PDand缸研theory,wereutilizedtoestablishtheantennaazimutIIcontrolsystem.Theresultsofthesimulationshowthatfuzzycontrolismoreeffectivethantheothertwoclassiccontrolstrategiesfortheradarantenna,whichhasacomplexinput/outputrelationshipandishardtosimplifybecauseoftheflexibilityoftheantennasupportandthepossibilityofitstorsionalvibration.Keywords:CO—simulationradarantennaazimuthcontrolfuzzycontrolO引育在传统的机电一体化系统设计过程中.机械工程师和控制工程师虽然在共同开发一个系统.但却需要为同一对象建立起各自不同的分析模型.然后在不同的软件平台上进行相互独立的测试与验证.直到在建造物理样机之后才能进行机械一控制系统综合试验。
ADAMS_Simulink柔性机械与控制系统仿真

虚拟与仿真ADA M SSimulink 柔性机械与控制系统仿真田风雷,孙容磊(华中科技大学,湖北武汉430074)T he Flex ible Robot Arm Simulation Syst em Based on A DAM S and SimulinkTIAN Feng lei,SUN Rong lei(H uazhong U niv ersit y of Science and T echno log y,Wuhan 430074,China)摘要:介绍了一种ADAM S Simulink 柔性机械与控制系统的仿真方法,该方法结合ANSYS 有限元分析与M atlab/Simulink 控制系统仿真,实现了对柔性机械及其控制的联合仿真,弥补了AD AM S 在有限元分析和控制系统设计上的不足.并通过实例,实现了柔性机械臂系统的滑动关节在PID 控制下的启停仿真.关键词:ADA MS Simulink;ANSYS;仿真;有限元;柔性机械臂中图分类号:P391.9文献标识码:A 文章编号:10012257(2006)10006202收稿日期:20060417基金项目:国家自然科学基金项目(50335020,50575079,50390064);九七三"资助项目(2003CB716207)Abstract:A method o f flexible mechanical sim ulatio n sy stem w ith reat time control is intro duced in this paper.T his method uses the m echanical sy s tem based o n FE method,com bine w ith the AD AM S and Matlab/Sim ulink simulatio n to get the kinetic character s of flex ible mechanical sy stem un der real tim e contro l,patch up the lim itation o f ADAM S in FE and control.A flex ible robot arm simulatio n sy stem is built under the PID control in this paper as an ex ample.Key words:ADAMSsim ulink;ANSYS;simulation;finite model;flex ible r obo t arm0 引言随着制造业的发展,航天领域对高速度、高精度和低能耗机器人的需求,使机器轻量化成为必然,而轻量化也带来了柔性化问题,柔性机械臂的振动会严重影响末端定位精度、效率和可靠性.由于柔性臂的非线性、强耦合和参数实变等特性[1-2],柔性臂的研究要比刚性臂的研究复杂得多.目前,对柔性系统的研究主要集中在3个方面:柔性系统的理论建模;柔性系统的仿真和实验;柔性系统的控制方法[1,3-4].柔性系统的建模法主要有假设模态法和有限元法,ADAMS 中研究柔性体的方法是通过考虑每1个节点的线性变形得到整个柔性体的非线性变形.而每1个节点的变形由多个模态线性叠加得到[5],孙立宁等使用Lagrange 法建立了水平面内两自由度串联柔性臂的动力学方程[6].我们将结合ANSYS 有限元分析与M atlab/Simulink 控制系统仿真,得到柔性机械系统与控制的联合仿真系统.1 A DA M SSimulink 模型及其建立方法ADAM S 虽然在机械系统的动力学,运动学分析上的功能非常强大,但是在几何建模、有限元分析、控制系统设计上明显不足,Simulink 在控制仿真上功能强大,但在机械系统仿真上很困难,AN SYS 有强大的有限元建模、划分、求解能力,却不适于机械动力学分析,ADAM S/Contro l 提供与M at lab/Sim ulink 的双向控制接口、ADAms/Flex 可通过m nf 文件与A NSYS 进行数据交换,通过这些接口将三者结合,则能构建起一个完整的柔性系统机械与控制的仿真系统,如图1所示.整个建模及仿真过程如下.a.机械零件建模.通常使用三维CAD 软件,如Solidwo rks,UG,Pro/e 等进行机械零件建模.62 机械与电子 2006(10)图1 ADA M S Simulink仿真系统模型建立将建好的模型导出为IGS格式文件.b.将零件导入ADA MS.对于刚体零件,直接将IGS格式的数据文件导入ADAM S即可.对于柔性零件,将IGS格式数据文件导入ANSYS,用AN SYS对零件进行有限元划分.设定零件的连接面为固定约束,进行模态分析,然后通过AN SYS M ain Menu>Solutio n>ADAM S Connection>Ex port to ADA MS,将划分好的有限元模型导出为模态中性文件(mnf文件).在ADAMS中,用Build >Flex ible Bo dies>ADAM S/Flex,将生成的柔性零件的mnf文件导入.c.装配导入的零件.在ADAMS中设置刚性零件的材料属性,设置各零件的装配关系.柔性零件须通过与之固定的中间刚体与其它零件装配.d.生成ADAM S Simulink控制接口.在AD AM S中,用Build>Controls T oo lkit>Plant Input和Build>Contr ols T oo lkit>Plant Out put中分别设定机械系统的控制输入与输出,然后通过Controls>Plant Export导出一个对于M at lab的.m文件.e.Simulink控制系统建模.在M atlab中选择.m所在文件夹为工作目录,运行adams_sy s则生成一个adam s_sys_.mdl文件,通过其中的adams_sub 作为ADAM S Simulink接口,建立控制系统,即可完成对ADAM S中机械系统的控制.f.仿真时,需先运行.m文件生成软件接口,然后在Simulink中运行控制程序,即可驱动ADAMS 实现整个ADAMS Simulink系统的仿真,仿真结果会存入一个.res文件,可以在ADAM S中,通过File>Impo rt调入进行分析.2 A DA M S Simulink柔性机械臂仿真实例2.1 机械模型建立在Solidw orks中建好的机械模型,生成IGS格式文件,将刚体零件直接导入ADAMS中,将柔性零件导入ANSYS进行有限元分析,生成mnf文件再导入ADAM S,然后在ADAM S中添加零件之间的装配和连接关系,即得到如图2所示的ADAM S 柔性机械臂模型关系.图2 机械臂模型关系2.2 Simulink控制系统模型建立这里我们通过ADAM S/Contr ol生成的AD AM S Simulink接口模块adam s_sub,建立了一个简单的PID控制,设定一个启停过程的位移时间参数为参考信号,以机械臂位移为反馈信号,通过输出力矩控制机械臂在X向的运动如图3所示.图3 Simulink控制系统2.3 仿真及结果通过模拟一个简单的启停过程,得到连接件3为刚性和柔性时机械臂末端响应,如图4所示.系统的仿真结果显示出末端的误差最大时为0.15mm.停止后经过0.1s稳定到小于0.01mm 的水平.可见,该系统成功地仿真了PID控制的启停过程,并得到了机械臂的柔性特征.63机械与电子 2006(10)图4 柔性臂启停过程仿真结果3 结束语应用ADAM SSimulink 柔性机械系统与控制的联合仿真方法,在ADAM S 中使用基于有限元的柔性体思想,结合ANSYS 有限元分析,得到了包含系统柔性特征的机械模型,并结合M atlab/Simulink 的控制仿真,获得了控制下的柔性机械臂的动力学仿真模型.此模型简单易于实现,对柔性机械系统的控制和结构设计有指导意义.参考文献:[1] 王树新,员今天,石菊荣,刘又午.柔性机械臂建模理论与控制方法研究综述[J].机器人,2002,24(1):86-91.[2] T alebi H A,K hor asani K ,Patel R V.N eur al netw o rkbased contro l schemes fo r flex ible link manipulat ors:simulat ions and ex per iments [J ].Neural Netw or ks,Special Issue,1998,11(7-8):1357-1377.[3] 杨 辉,洪嘉振,余征跃.柔性多体系统动力学实验研究综述[J].力学进展,2004,(2):171-181.[4] 戴学丰,孙立宁,刘品宽,蔡鹤皋.柔性臂机器人控制算法综述[J].电机与控制学报,2002,6(2):158-161.[5] T heo retica l Backg ro und.A DAM S/Flex online help [Z].M SC.Soft war e Co rpor ation,2004.[6] 孙立宁,王洪福,曲东升.柔性臂动力学建模及比较研究[J].压电与声光,2003,25(6):525-529.作者简介:田风雷 (1982-),男,土家族,湖北长阳人,华中科技大学机械学院硕士研究生,研究方向为数字制造技术.H ilbert 谱分析方法及计算机仿真实现高广华,危韧勇,李志勇,黎群辉(中南大学,湖南长沙410075)Hilbert Spectrum Analy sis M ethod and Computer Simulation RealizationGAO Guang hua,WEI Ren yong,LI Zhi yong,LI Qun hui(Cent ral So uth U niv ersity ,Chang sha 410075,China)摘要:针对机械故障诊断技术的研究,介绍一种时频分析方法(H ilbert 谱分析).将其应用于轴承故障检测中,经计算机仿真,该方法能够有效地检测出故障特征,具有实用价值.收稿日期:20060406关键词:机械轴承;故障诊断;H ilbert 谱分析中图分类号:T B112文献标识码:A 文章编号:10012257(2006)10006403Abstract:Mechanical breakdow n diagnosistechno logy are r esearched,This article in detail in troduced one kind of new time frequency analysis m ethod(H ilbert spectr um analysis)and applying it to br eakdow n diag no sis of ax is After the co mputer sim ulation,this m ethod can effectively ex am ine out the malfunction characteristic,has the pr actical usevalue.Key words:locom otiv e bearing ;malfunction di agnosis;hilbert spectr um64 机械与电子 2006(10)。
adams和simulink联合仿真的案例分析
相信大家在联合仿真ADAMS和SIMULINK时都会遇到很多的问题:ADA MS/contro中的例子ball_beam通过联合仿真,更容易理解a dams和simulink的联合仿真精髓。
小球在一脉冲力的作用下沿着横梁滚动,此时梁的两端受力不平衡,梁的一段倾斜,为了使得小球不掉下横梁,在横梁上施加一个绕Z轴的力矩,横梁达到一定的角度之后逆向转动,然后小球就在这个作用力矩的控制下来回滚动而不掉下横梁!其中控制力矩在整个过程中是个动态变化的,力矩Torque_In是通过位移Position 和横梁转角Bea m_Angle确定,这个是在simulink中通过框图完成的。
首先我申明一下我用的是adams2003和matlab6.5以下我说明一下我的操作步骤:1、把control中的ball_beam文件copy到另外一个文件夹下,同时设置adams和matlab的默认路径即为ball_beam文件夹,这样可以省略很多不必要的麻烦!2、用aview打开ball_beam.cmd文件,先试试仿真一下,可以看到小球会在脉冲的作用下滚动,仿真时间最好大于8s3、载入control模块,点击tools|plugin manager在contro l框选定。
4、点击control|plant export在file prefix下输入你的文件名,这个可以随便的,我输入的是myball,在plant input点击右键点击guess选定tmp_MDI_PINPUT,在tmp_MDI_PINPUT 中就是输入力矩Torque_In,只有一个输入参数;同样在plant output中点击右键guess选定tmp_MDI_POUTPUT,这是模型的输出变量横梁转角Beam_Angle和小球与横梁中心轴的距离position。
controlpackage选择matlab,type是non_linear,初始化分析选择n o,然后按ok!此时m文件已经生成了!5、打开matalb,设置你的工作路径在ball_beam文件夹上,键入myball,马上有%%% INFO : ADAMS plant actuators names :1 Torque_In%%% INFO : ADAMS plant sensors names :1 Beam_Angle2 Position出现6、再键入adams_sys,弹出一个控制框图,这时可以新建一个mdl文件,将adams_sub拖入你新建的mdl框图中,其实再这里有一个偷懒的办法,就是在matlab中打开ball_beam.md l文件,然后把他的那个adams_sub用你的刚产生的这个代替,然后另存为my_ball.mdl!7、设置仿真参数,在你刚建立的my_ball.mdl框图上的simul ation parameter里设置一下stop time为10s,步长为ode1 5s。
ADAMS+AMESIM+SIMULINK操作说明
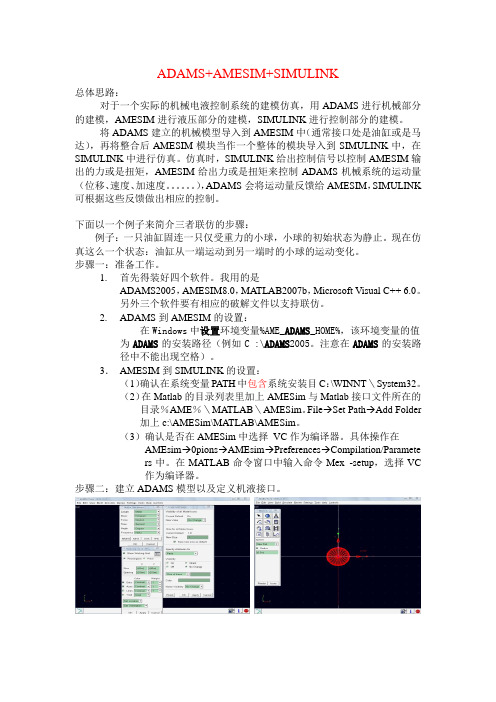
ADAMS+AMESIM+SIMULINK总体思路:对于一个实际的机械电液控制系统的建模仿真,用ADAMS进行机械部分的建模,AMESIM进行液压部分的建模,SIMULINK进行控制部分的建模。
将ADAMS建立的机械模型导入到AMESIM中(通常接口处是油缸或是马达),再将整合后AMESIM模块当作一个整体的模块导入到SIMULINK中,在SIMULINK中进行仿真。
仿真时,SIMULINK给出控制信号以控制AMESIM输出的力或是扭矩,AMESIM给出力或是扭矩来控制ADAMS机械系统的运动量(位移、速度、加速度。
),ADAMS会将运动量反馈给AMESIM,SIMULINK 可根据这些反馈做出相应的控制。
下面以一个例子来简介三者联仿的步骤:例子:一只油缸固连一只仅受重力的小球,小球的初始状态为静止。
现在仿真这么一个状态:油缸从一端运动到另一端时的小球的运动变化。
步骤一:准备工作。
1.首先得装好四个软件。
我用的是ADAMS2005,AMESIM8.0,MATLAB2007b,Microsoft Visual C++ 6.0。
另外三个软件要有相应的破解文件以支持联仿。
2.ADAMS到AMESIM的设置:在Windows中设置环境变量%AME_ADAMS_HOME%,该环境变量的值为ADAMS的安装路径(例如C :\ADAMS2005。
注意在ADAMS的安装路径中不能出现空格)。
3.AMESIM到SIMULINK的设置:(1)确认在系统变量PATH中包含系统安装目C:\WINNT\System32。
(2)在Matlab的目录列表里加上AMESim与Matlab接口文件所在的目录%AME%\MATLAB\AMESim。
File→Set Path→Add Folder加上c:\AMESim\MATLAB\AMESim。
(3)确认是否在AMESim中选择VC作为编译器。
具体操作在AMEsim→0pions→AMEsim→Preferences→Compilation/Parameters中。
ADAMS与Simulink的汽车ABS控制联合仿真
0 引言
模糊控制采用类似于人脑的模 糊推理方法, 遵循一定的控制规则, 结合实际经验, 对系统进行 动态调控, 具有不依赖对象的数学模型、便于利用 人的经验知识、鲁棒性好、简单实用等优点, 是现 在 ABS控制中的比较优秀的算法, 国内很多科研 单位都对其进行了比较深入的研究。然而由于在 MATLAB / S imu link中建立汽车整车模型是一个非 常繁琐和困难的事情, 因此大部分研究采用的是 单轮车辆模型进行仿真分析。由于没有考虑车辆 制动过程中轴荷的转移等因 素的影响, 单轮模型 与真实的情况有较大的差别。为了让仿真分析更 加符合实际情况, 本文在 ADAM S /CAR 平台上建 立了整车模型, 然后再与 MATLAB /S im ulink中建 立的模糊控制防抱死系统进 行联合仿真, 结果表 明 ABS模糊控制系统在整车制动过程中能够得到 比较满意的防抱死效果。
表 1 模糊控制规则
U
NB
NM
E
ZE PS
PM
PB
N B NM
PB PB PB PB PB PM PB PM PM PS PS PS
EC
N S ZE PS PM PB PM PM PS PS N S PM PS N S NS NM PS N S N S NS NM PS N S N S NM N B PS NM NM N B N B NS NB NB NB NB
在 ABS控制系统中是通过调整制动压力来改 变滑移率的大小从而实现防 抱死功能, 因此在控 制过程中涉及到的状态变量 有车轮的轮速、车速 和制动压力。针对 ABS控制系统中的需求, 在整 车的 ADAM S虚拟样机模型中设置了 4个输入变 量和 5个输出变量。 4个输入变量分别为 4个车 轮的制动压力控制量 U 1、U2、U3、U4。这 4个变量 是通过在 MATLAB /S im ulink 中建立 的 ABS 模糊 控制器根据 4个车轮的实时滑移率情况传递出来 的。 5个输出变量分别为 4个车轮的轮速 V1、V2、 V3、V4 和车速 Vx。在仿真过程中通过将这 5 个变 量传入到滑移 率计算 模块得 到 4 个车轮 的滑移 率, 再将得到的 4 个滑移率送入 ABS 模糊控制器 中让其输出得到相应的车轮制动压力控制量。由 于实际 ABS液压系统动态特性造成制动力矩相对 于控制指令有一定的迟滞, 因此在控制系统中设 置了迟滞时间约为 10 m s[ 4] 。完整的 A BS 联合仿 真控制模型如图 6所示。
以ABS为例讲解Adams与SIMULINK联合仿真
密级:公开版权所有者,及“ KHTEC”商标所有人长春孔辉汽车科技有限公司CAE能力建设报告以ABS为例说明ACAR与MATLAB联合仿真报告人:房策审核:房策日期:以ABS为例说明ACAR与MATLAB联合仿真一,仿真前准备 (3)1.1仿真连接需要的库函数 (3)1.2ADAMS和MATLAB版本 (3)二,制作ABS仿真制动器模块 (3)2.1理解共享模板制动器模型 (3)2.2建立ABS开关信号(以左后轮为例) (5)三、导出ABS控制平台 (5)四,修改生成文件 (7)五,联合仿真 (8)六、参考文献 (9)一,仿真前准备1.1仿真连接需要的库函数文件名:DecodeAdams_plantAdams_serverPlant可从文件连接库函数压缩包中查找需要将库函数放置到MATLAB/WORK文件夹下。
1.2ADAMS和MATLAB版本两个软件版本能够匹配是联合仿真成功的关键,推荐使用:ADAMS2007MDR2,和MATALB 7.0 R14,迅雷上都可以下载到。
二,制作ABS仿真制动器模块2.1理解共享模板制动器模型_brake_system_4Wdisk.tpl模板查看每个制动力矩变量的定义原理:以左右轮为例图2.1-1左右轮制动力矩变量截图其定义方程为:2*._brake_system_4Wdisk.pvs_rear_piston_area*varval(._brake_system_4Wdisk.rear_brake_line_pressure)*._brake_system_4Wdisk.pvs_rear_brake_mu*._brake_system_4Wdisk.pvs_rear_ effective_piston_radius*STEP(V ARV AL(._brake_system_4Wdisk.left_rear_wheel_omega), -0.0175,1,0.0175,-1)其中:“2”表示双面;rear_piston_area表示盘式制动器作用半径rear_brake_line_pressure表示后轴制动分配比例brake_mu表示制动片摩擦系数rear_ effective_piston_radius表示制动器作用半径left_rear_wheel_omega表示左右轮车轮转速,正值STEP函数用作连续过度车轮正反转切换时的制动力矩。
如何顺利实现adams和simulink的联合仿真?
【分享】经验之谈:如何顺利实现adams和simulink的联合仿真?论坛中有关adams和simulink联合仿真的帖子不少,部分是成功者的经验,多数是初学者的疑惑。
怎么安装和找到control模块,怎么在control中生成必需的中间文件,为什么仿真会失败?本人也曾对这些问题困惑过,经过一番摸索,积累了一点经验,愿与大家商讨。
对于第一个问题,我想就不必多说了。
对于第二个问题可以参考郑建荣的ADAMS虚拟样机技术入门与提高第十三章机电一体化系统仿真部分,书中有两个问题需要注意:(1)书中介绍的ADAMS版本好像是10.0的,对于使用12.0的有一些差异:在Plant Export设置中无法直接选择输入输出变量control_torque、azimuth_position、rotor_velocity,它们分别由专门的宏tmp_MDI_PINPUT和tmp_MDI_POUTPUT表示。
(2)天线仰角的方位角似乎应该是elevation_position,而不是azimuth_position,后者是天线支撑的转角。
其它按文中所述步骤进行,File Prefix 栏可随便写,不必一定用ant_test,最后在ADAMS的当前目录下生成四个文件:ant_test.cmdant_test.admant_test.acfant_test.m第三个问题基本上是由于没有正确设置路径,找不到所需的文件造成的:~),这也说明了control模块在设计时没有很好地考虑健壮性问题。
具体来说simulink在开始仿真时要找到以下这些文件:1。
上述生成的文件,主要是ant_test.m和ant_test.cmd,ant_test.m用于在simulink中对control模块环境和一些参数进行初始化,它必须在仿真前执行;ant_test.cmd是天线模型定义文件,由于这里ADAMS是作为simulink创建的一个子进程而被启动的,它所需的模型文件名由simulink的调用参数传过来的,所以simulink要能够定位ant_test.cmd (我一开始把它放到adams当前目录下,频频失败)。
进给系统Adams和Simulink联合仿真
《现代数控技术及装备》
课程设计报告
题目:三轴数控铣床进给系统的ADAMS和SIMUILNK联合仿真
学院:机械工程学院
班级:
姓名:
学号:
摘要
以某数控三轴立式铣床为对象,通过测绘,利用SolidWorks建立三轴立式铣床整机模型。
本文在此模型的基础上,将机床整机模型导入ADAMS 中,并在ADAMS 中添加约束和驱动;利用虚拟样机技术建立了机床伺服进给驱动系统多体动力学模型,通过MATLAB/Simulink 模块建立了机床伺服进给驱动系统控制模型,通过ADAMS/Controls 模块作为两软件的接口,将ADAMS中的机械模型的位移、速度等输出反馈给控制模型,建立了机床进给驱动系统的机电联合仿真模型,实现了复杂机电系统的联合仿真,仿真结果表明机床整机进给系统具有良好的动态响应特性。
并为机床进给系统的设计与调试提供可靠依据。
关键词: 虚拟样机技术; 伺服进给驱动系统; 机电联合仿真
目录
1 绪论 (1)
1.1 背景 (1)
1.2 本文主要涉及内容 (1)
2数控铣床的整机建模 (2)
2.1X和Z向进给系统建模 (2)
2.2 Y向进给系统建模 (2)
3 动力学建模 (4)
3.1 模型导入 (4)
3.2 运动学仿真 (4)
3.3 动力学系统建模 (5)
3.4 动力学模型导出 (6)
4 ADAMS/Simulink联合仿真 (7)
4.1 联合仿真的创建 (7)
4.2联合仿真分析 (8)
4.3 联合仿真的结论 (11)
5 总结 (12)
结束语 (13)
参考文献 (14)
附录 (15)。
基于ADAMS与MATLAB的数控机床伺服进给驱动系统联合仿真

Uni t e d S i mu l a t i o n a b o ut CNC Ma c hi ne To o l Fe e d Dr i v e Sy s t e m Ba s e d o n ADAM S a n d M ATLAB
t e n r mo d e l o f s e n r 0 f e e d s y s t e m wa s b u i l t b y MAT L AB /S i mu l i n k mo d u l e . Ba s e d o n t h e i n t e r f a c e b e t w e e n ADAMS a n d MA T LA B / S i mu — l i n k , me c h a n i c a l — e l e c t r o n i c C O — s i mu l a t i o n mo d e l wa s e s t a b l i s h e d,a n d t h e c o mp l e x me c h a n i c a l — e l e c t r o n i c s y s t e m C O — s i mu l a t i o n w a s r e ・
,
YE Xi a n b i n. ZHANG Do n g s h e n g. F ENG Bi n
( S c h o o l o f M e c h a n i c a l E n g i n e e r i n g ,X i ’ a n J i a o t o n g U n i v e r s i t y ,X i ’ a n S h a a n x i 7 1 0 0 4 ,C h i n a )
adams与simulink联合仿真错误归纳

adams与simulink联合仿真错误归纳在建立adams与matlab的连接时,要导出adams模型,点击controls/plant export 命令,创建输入输出变量,并生成三个文件,为aa.m aa.cmd和aa.adm文件。
(.m文件保存输入输出信息,.cmd文件为命令文件,.adm为数据文件)其中aa为file prefix 框中的内容,即导出模型的文件名。
在matlab下输入adams_sys,创建系统控制模型。
联合仿真常见错误归纳1、将…\MSC.ADAMS\2005\Win32\文件夹中的adams_plant.dll文件和…\MSC.ADAMS\2005\Controls->Win32\下的plant.lib文件也Copy到matlab的工作目录下。
2、前一次的仿真出错,虽然修改了matlab模块,但matlab工作空间内的信息没有修改。
解决办法是在matlab命令行中键入:clear all回车XXX.m回车adams_sys回车从而,重新打开模块。
3、还有检查一下adams界面中,建立控制模块的control plant的adams host 是否为本机名。
4、检查m文件中路径“\”与“/”的错误,这是系统自动生成文件时的bug,只有手动修改。
5、如果有上网的客户端认证软件建议在仿真之前把它关掉,因为经常出现ADAMS 的server不能开启的情况,关掉认证软件后,就能执行了。
一般一些校园网上网时比较容易用这些客户端认证软件,比如华为的。
6、把ADAMS的工作路径直接设置到MA TLAB的work文件夹中,避免路径出错7、修改.m文件中的flag==08、有时由于参数不正确等原因,仿真会失败,比如提示如下错误:Error reported by S-function 'adams_plant' in 'GCdd/adams_sub/ADAMS Plant/S-Function': ADAMS output uation failure at time 0.695000。
基于ADAMS和Simulink并联机床联合仿真

文章编号 : 1 0 0 1 — 2 2 6 5 ( 2 0 1 3 ) 0 8— 0 0 3 9— i m u l i n k并 联 机 床 联 合 仿 真
杨 辉 , 赵 恒华 , 付 红栓 , 高兴 军
( 辽 宁石 油化工 大 学 机 械 工程 学 院 , 辽 宁 抚 顺 1 1 3 0 0 1 ) 摘要 : 通过以3 - T P T并联 机床 作 为研 究 对 象 , 建 立该 并联 机 构 的 运 动 学 逆 解 方程 。 然后 在 A D MA S / V i e w环 境 中 , 构 建该 并联 机构 的虚 拟样 机 , 然后 在 S i m u l i n k环境 中建 立该 虚拟 样机 的控 制 系统模 型 ,
从 而 实现 对 其 的 联 合 仿 真 , 得到 驱 动 力 以及 刀具 位 移 变化 曲线 。通 过 对 比驱 动 杆 杆 长 变化 曲线 , 从
而验证 了运动 学逆解 方程 的 准确性 。 同时也 说 明该 并联机 构 在 空 间运 动 时 , 具有 良好 的平稳 性 。 除 此之 外 , 利 用虚 拟 样机联 合 仿真技 术 对 并联机 床 运动 学进 行研 究 , 避 免 了复 杂 的数 学建模 与推 导 , 从
而 大 大 缩 减 了运 动 学 分 析 工 作 量 。 关键 词 : 并联机 构 ; 虚拟 样 机 ; 控 制 系统 ; 平 稳 性 中图分 类 号 : T Hl 2 2 文 献标 识码 : A
Co - s i m ul at i o n o f Par a l l e l M a c h i ne To o l Ba s e d o n A DAM S a nd Si m ul i nk
YANG Hu i ,Z HA0 He n g — h u a ,F U Ho n g - s h u a n,G AO Xi n g — j u n
基于ADAMS与Simulink的机电一体化系统联合仿真
STEP 4
机电系统仿真分析
所创建的机电联合
仿真模型在Simulink 环 境下进行仿真,采用 Runge–Kutta (龙格-库 塔法)方法,仿真时间为 0.25s,步长为 0.001s, 允许误差使用默认值.
设置仿真参数
1) 在Simulink工具菜单栏,选择Simulation菜单。 2) 在弹出的下一层菜单中,选择Parameteres,显示参数设置对话框。 3) 设置仿真时间,在Start Time栏,输入0.0,设置开始时间。在End Time栏, 输入0.25,设置结束时间。 4) 在仿真类型的第一个选择栏,选择variable step mode参数。第二个选择栏, 选择ode45s参数。 5) 对于其他各项参数,取默认值。 6) 选择OK按钮,关闭Matlab仿真参数设置对话框。
(1) 将复杂的控制系统添加到机械系统模型中,然后对机电一体化进行联合 分析。
(2) 直接利用ADAMS程序创建控制系统分析中的机械系统仿真模型,而不需 要使用数学公式建模。
(3) 在ADAMS环境或控制应用程序环境获得机电联合仿真结果。
ADAMS/Controls 的设计流程
建立机械系统的ADAMS模型 确定ADAMS的输入和输出变量,生成对象/过程模型 建立控制系统模块 模型的仿真
Step 1
构造ADAMS机械系统样 机模型
确定ADAMS输入和输出 Step 2
Step 3 控制系统建模
机电系统仿真分析 Step 4
STEP 1 构造ADAMS机械系统样机模型
熟悉模型
1
2
3
4
5
6
方向旋 转马达
方位减 速齿轮
方位固 定
基于ADAMS与Simulink的机电一体化系统联合仿真1段景文

基于ADAMS与Simulink的机电一体化系统联合仿真 1段景文发布时间:2021-09-09T10:00:22.714Z 来源:《中国科技人才》2021年第17期作者: 1段景文 2张文泽[导读] 本文主要针对天线的方位角控制问题进行研究,并以雷达天线为研究对象,基于ADAMS和Simulink进行机电一体化仿真研究。
郑州飞机装备有限责任公司河南省郑州市 450000摘要:本文主要针对天线的方位角控制问题进行研究,并以雷达天线为研究对象,基于ADAMS和Simulink进行机电一体化仿真研究。
研究首先利用控制模块把MATLAB/Simulink与雷达天线样机模型连接在一起,然后分别采用三种不同的理论方法,来建立天线方位角控制系统。
这三种不同的理论分别是PID算法,PD算法以及模糊理论。
关键词:雷达天线;联合仿真;方位角控制;模糊控制引言现如今,伴随着虚拟样机(virtual prototyping)技术的不断发展,仿真平台不再是传统的机械工程师和控制工程师分别独立进行设计,而是可以共享同一个样机模型。
例如:①共享样机体系,有利于机械工程师和控制工程师在仿真分析中,充分考虑彼此各种因素对控制系统造成的影响。
②共享样机体系显著降低了物理样机测试环节的工作量,工程师不必再一次又一次的重复测验。
③在测验过程中,使用真实的机械磁系统,提高了控制系统设计的成功率。
④运营共享样机体系有利于缩短设计周期,从而降低研发成本。
因此,本文主要以雷达天线为研究对象,针对天线的方位角控制问题,并且在ADAMS和Simulink的基础上,对机电一体化器械进行仿真研究。
并在此基础上采用PID算法,PD算法以及模糊理论这三种方法,共同建立天线方位角控制系统。
1基于ADAMS和Simulink的联合仿真ADAMS是原美国MDI公司开发的一款仿真软件,主要应用的是机械系统动力学。
在ADAMS和Simulink主要有六种方法可以建立机电设备的控制系统网络,这六种方法分别是:①运用关于时间的函数处理力与力矩的关系;②编写用户子程序,使其能够表达控制规则;③使用ADAMS/View控制工具箱;④借助ADAMS/Linear模块导出系统的状态矩阵;⑤利ADAMS/Controls模块把Simulink模块连结在一起,共同进行联合仿真;⑥将Simulink中的模块转化为Fortran代码,并将其导入ADAMS作为广义状态方程。
基于ADAMS与Simulink的电动式自动机联合仿真

基于ADAMS与Simulink的电动式自动机联合仿真江君;赫雷;周克栋【期刊名称】《兵工自动化》【年(卷),期】2012(31)7【摘要】In order to improve design efficiency, combine the software of ADAMS and Simulink to do simulation study for dynamoelectric automatic mechanism system. With the automatic mechanism of certain type gas-operated weapon as the research object, the dynamoelectric automatic mechanism system was established, in which the servo motor was used as the power, the crank-slider mechanism as the transmission mechanism, and the control system used the double close-cycle control with electric current and velocity as the controlling parameters. The 3-D model, dynamics model and the control scheme were set up on Solidworks, ADAMS and Matlab/Simulink respectively, and the co-simuiation were completed by the ADAMS/Control interface module. The simulation results demonstrated that the system had good path tracking ability to the input signal, and showed that the established dynamics model and electric controlling model were accurate and could provide reliable basis for the design of dynamoelectric automatic mechanism system.%为提高设计效率,将ADAMS与Simulink结合,对电动式自动机系统进行仿真研究.以某导气式自动武器自动机为研究对象,以伺服电机为动力源,曲柄滑块机构为传动机构,采用电流与速度双闭环控制,建立电动式自动机系统.利用Solidworks、ADAMS、Matlab/Simulink软件分别建立系统的实体模型、动力学模型以及电机伺服系统的控制方案,以ADAMS/Controls作为接口模块,实现系统的联合仿真.仿真结果表明:系统输出对输入具有较好的轨迹跟踪能力,证明所建动力学模型和电气控制模型准确,可为系统的设计与调试提供可靠依据.【总页数】4页(P45-48)【作者】江君;赫雷;周克栋【作者单位】南京理工大学机械工程学院,南京210094;南京理工大学机械工程学院,南京210094;南京理工大学机械工程学院,南京210094【正文语种】中文【中图分类】TJ29【相关文献】1.基于ADAMS与Simulink的平衡重式叉车侧倾分级控制联合仿真 [J], 黄帅;唐希雯;谢海;何龙;夏光2.基于ADAMS/Simulink联合仿真的电动汽车四轮轮毂电机驱动控制 [J], 余波3.基于Adams-Simulink的电机丝杠式偏转驱动机构控制系统设计与仿真 [J], 梁毅辰;谷良贤;胡寒栋4.基于Simulink与ADAMS联合仿真的飞艇重心调节装置设计 [J], 吴炜;杨昊霖;魏明辉;曾晓楠;文伟5.基于Adams/Simulink的分布式驱动电动客车操纵稳定性仿真 [J], 蔡鸿毅因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《现代数控技术及装备》课程设计报告题目:三轴数控铣床进给系统的ADAMS和SIMUILNK联合仿真学院:机械工程学院班级:姓名:学号:摘要以某数控三轴立式铣床为对象,通过测绘,利用SolidWorks建立三轴立式铣床整机模型。
本文在此模型的基础上,将机床整机模型导入ADAMS 中,并在ADAMS 中添加约束和驱动;利用虚拟样机技术建立了机床伺服进给驱动系统多体动力学模型,通过MATLAB/Simulink 模块建立了机床伺服进给驱动系统控制模型,通过ADAMS/Controls 模块作为两软件的接口,将ADAMS中的机械模型的位移、速度等输出反馈给控制模型,建立了机床进给驱动系统的机电联合仿真模型,实现了复杂机电系统的联合仿真,仿真结果表明机床整机进给系统具有良好的动态响应特性。
并为机床进给系统的设计与调试提供可靠依据。
关键词: 虚拟样机技术; 伺服进给驱动系统; 机电联合仿真目录1 绪论 (1)1.1 背景 (1)1.2 本文主要涉及内容 (1)2数控铣床的整机建模 (2)2.1X和Z向进给系统建模 (2)2.2 Y向进给系统建模 (2)3 动力学建模 (4)3.1 模型导入 (4)3.2 运动学仿真 (4)3.3 动力学系统建模 (5)3.4 动力学模型导出 (6)4 ADAMS/Simulink联合仿真 (7)4.1 联合仿真的创建 (7)4.2联合仿真分析 (8)4.3 联合仿真的结论 (11)5 总结 (12)结束语 (13)参考文献 (14)附录 (15)1绪论1.1 背景数控机床伺服进给驱动系统主要由伺服电机、伺服驱动器、联轴器,丝杠导轨和工作台组成,是以机床移动部件的位置和速度为控制量,接受来自插补装置或插补软件生成的进给脉冲指令,经过一定的信号变换及电压、功率放大、检测反馈,最终实现机床工作台与刀具相对运动的控制系统。
现代数控机床是一个非常复杂的机电耦合系统,进给伺服系统的速度、精度等性能很大程度上决定了数控机床的整体性能,因此研制高性能的进给伺服系统是发展现代数控机床技术的关键。
在传统的机电控制系统设计过程中,机械工程师和控制工程师各自都需要建立自己的模型,然后分别采用不同各自的仿真软件,对机械系统和控制系统进行独立的设计调试和实验,最后通过建好的物理样机模型对其进行机械系统和控制系统联合调试,如果发现问题就要重新修改各自的仿真模型,然后重新建造物理样机并对其进行再一次的联合调试这种设计方式显然比较费时费力。
机电联合仿真技术可以很好地解决传统机电控制系统设计的不足,为机械和控制系统进行联合分析提供了一个全新的方法,即利用虚拟样机技术对机械系统和控制系统进行反复联合调试,直到获得满意的设计效果,然后进行物理样机的建造和调试,大大缩短样机的开发周期和减少开发成本。
1.2本文主要设计内容本文以三轴数控立式铣床为研究对象,对机床进给系统联合仿真,主要有一下相关工作:1.测绘机床,在solidworks中实现机床各部件的建模以及装配,建立完整的数控机床模型。
2.将模型装配体简化并转化为中间x_t格式导入到Adams中,添加材料属性、约束和驱动,进行运动学仿真。
3.建立机床进给系统的动力学模型,并导出simulink可读文件。
4.在simulink中建立控制模型,调节控制参数,验证系统的动态响应特性。
2 数控铣床整机建模SolidWorks在零件造型、装配操作上直观简单,容易上手,而且功能强大。
本次建模采用此软件,同时也为了与后续的动力学建模软件ADAMS 在零件互转上具有更好的兼容性。
2.1 X、Z向进给系统建模Z向进给系统主要包括底座、导轨、滚珠丝杠螺母、以及驱动单元和工作台,为了尽可能的减少联合仿真的中的计算量,建模中将导轨、支承单元等与底座集成,并将联轴器与丝杠集成,省略了繁琐的固定件。
X向进给系统如图所示图2.1 Z向进给系统模型图2.2 Z向和X向进给系统模型2.2 Y向进给系统建模Y向进给系统主要包括:立柱、主轴单元、导轨、滚珠丝杠螺母以及支承单元和驱动单元,为了尽可能的减少联合仿真的中的计算量,建模中将导轨、支承单元等与底座集成,并将联轴器与丝杠集成,省略了繁琐的固定件。
Y向进给系统如图所示。
图2.3 机床整机图其他模型及相关细节不做详细介绍,具体见附件13 动力学建模机械手的动力学建模是在ADAMS软件中完成的。
ADAMS是世界上运用最广泛的机械系统动力学分析软件,应用广泛,包括航空航天、汽车工程、工业机械和工程机械等领域。
而且ADAMS能够与绝大多数CAD软件(如SolidWorks、Pro/E、CATIA、UG等)进行模型的导入导出,同时也能够与大多数控制软件(如MATLAB、EASY5 等)进行联合仿真。
因此,在本次作业中,完成正是这部分内容:将SolidWorks模型导入到ADAMS中建立动力学模型,再与MATLAB进行联合仿真。
本次设计中,可对XYZ三向进给系统进行动力学联合仿真,但是由于三轴同时仿真,计算机计算量特别大,仿真时间很长,所以本文中仅仅以Z向进给系统为例,进行联合仿真介绍。
3.1模型导入将建好的SolidWorks模型另存为ADAMS能读取的文件类型Parasolid(*.x_t)文件,因为ADAMS使用的是Parasolid 内核,能够获得较高的文件类型精度,处理时间更短、更方便。
导出后的文件见附件2在ADAMS中导入模型时,在导入对话框中,File Type选择Parasolid,在File To Read栏右键选Browse,将SolidWorks 导出的模型选中,默认ASCⅡ类型,创建模型名称为model_2。
3.1.2环境设置在建立虚拟样机前,需要设置ADAMS工作环境,包括设置坐标系、单位制、重力加速度大小和方向等。
设置坐标系坐标系的设置可通过菜单Setting→Coordinate System,弹出坐标系设置对话框,选择Cartesian,即笛卡尔坐标系,也是ADAMS/View默认的坐标系。
设置单位选择统一的单位制有利于快速准确地进行建模分析,单击菜单Setting→Units,弹出单位设置对话框,这里选择MKS 单位制,即长度为米,质量为千克,力为牛顿,时间为秒。
3)设置重力加速度大小和方向动力学建模中,零部件的重力是不可缺少的重要参数,因此在此之前必须设置重力。
单击菜单Setting→Gravity,弹出重力加速度设置对话框,默认的方向为负Y方向,大小为9806.65mm/s^2,点击OK 即可。
3.2 运动学仿真3.2.1 定义材料属性在ADAMS 中建立动力学模型,需要给每个零件定义材料。
为了保证机床的工作效率,底座、立柱为铸铁,滚珠丝杠螺母为钢铁。
因此,在定义材料时,将除操作方法为:在需要定义的材料的零件上右击,选择Part:*,其中*为零件名,再选择Modify,在Define Mass By 栏选择Gemetry and Material Type,在Material Type处右键Browser选择材料即可。
3.2.2 添加运动副进给系统中的运动副主要有移动副、转动副、螺旋副。
1、移动副在导轨和滑块之间添加移动副,操作方法是:选择主工具箱的Joint:move 命令,主工具箱下方的Construction项设置为2Bod-1Loc 和Pick Feature,前者表示选择两个构件和一个连接位置点,运动副被固定在第一个构件上,相对于第二个构件运动;后者表示选择特征以确定矢量方向来定义运动副的方向。
2、转动副在丝杠和支承单元处添加旋转副,操作方法是:选择主工具箱的Joint:move 命令,主工具箱下方的Construction项设置为2Bod-1Loc 和Pick Feature,前者表示选择两个构件和一个连接位置点,运动副被固定在第一个构件上,相对于第二个构件运动;后者表示选择特征以确定矢量方向来定义运动副的方向。
3、固定副在底座和ground以及底座和立柱之间添加固定副。
固定副的操作为:点击工具箱的Joint:Fixed,然后选择Construction 的形式为2Bod-Loc,Pick Feature,然后选择要固定到一起的两个零件,再选择固定位置即可。
3.2.3创建驱动这里使用的是rotational joint motion ,这是一种扭矩,选取建模时已定义的旋转连接,给各滚珠丝杠添加扭矩。
分别给XYZ三向添加扭矩。
3.2.4运动仿真点击主工具箱的Interactive Simulation Controls,设置仿真时间为15s,步数为500步。
仿真过程见附件3。
3.3动力学系统建模3.3.1设置力矩首先需要解除运动学的驱动控制。
分别在各电机驱动上右键选择Motion:*(*为驱动名称)→(De)activate,取消勾选两个复选框,点击OK即可。
解除驱动后,需要在每个旋转关节处建立单分量力矩。
点击主工具箱的Applied Force:Torque,分别设置参数为“Two Bodies”,Action Body 选择被驱动的构件,Reaction Body 选择施力的构件,即可创建单分量力矩。
分别将名称改为SFORCE_X和SFORCE_Y、SFORCE_Z。
3.3.2创建输入输出变量1)输入变量及确定创建输入状态变量,选择Build→System Elements→State Variable→New,输入变量名为control_torque_X,F(time)一栏为0,表示控制力的数值将从控制软件的输出获得。
同样方法创建变量control_torque_Y、control_torque_Z。
在ADAMS 图形窗口中,右键单击SFORCE_X,选择Modify,在Function一栏定义为VARVAL(Control_torque_X),以实时从状态变量control_ torque_2中接收力矩的数值。
同样方法对SFORCE_Y、SFORCE_Y设置。
确定输入变量,择Build→Data Elements→Plant→Plant Input→New,在Variable Name中用右键选择创建的control_torque_Z变量,点击OK即可。
2)输出变量及确定创建输出变量,选择Build→System Elements→State Variable→New,输入变量名为Xx,F(time)一栏为DZ(MARKER_73,MARKER_72, MARKER_72),表示返回绕X向的位移变化。
再创建变量Vx,F(time)一栏为VZ(MARKER_73,MARKER_72,MARKER_72),表示返回X向的速度。
再创建变量Vx,F(time)一栏为ACCZ(MARKER_73,MARKER_72,MARKER_72),表示返回X向的加速度。