北理工理论力学第6章-6.3(11-3)2013-11-10(2学时)
848理论力学-北京理工大学

北京理工大学2012年硕士研究生入学考试理论力学试题一、圆盘半径为r ,匀速转动,角速度为o ω,在固定圆弧上逆时针滚动。
圆弧半径为R=2r 。
杆AB 长为l=2r ,C 为杆AB 中点。
杆OA 长为OA l =r 。
A 、B 处为滑动铰接,O 为固定铰链。
杆OA 、AB 、圆盘重量以及各处摩擦不计,求杆AB 的角速度和角加速度。
二、已知1O 和2O 是固定铰链,A 、B 是光滑铰链接触。
杆1O A 的角速度、角加速度分别为和ωα,且都是顺时针方向。
圆盘O 半径为r ,杆1O A 与杆2O B 的长度为r ,杆1O A 、2O B 、GH 、圆盘重量及各处摩擦不计,试求杆GH 的速度和加速度。
三、已知A 端为固定铰链,杆AB 长为l=4r 。
半径为r 的圆盘O 在倾角为o 30的固定斜面上,其重量为W 。
杆AB 与圆盘的摩擦系数为B f =3,圆盘与固定斜面的摩擦系数为D f =4。
作用于杆AB 上一转矩M 。
杆AB 重量不计,为使圆盘静止,试求转矩M 的取值范围。
四、已知1O 和2O 是滑动铰链,杆1O A 长为l ,杆AB 长为2l 。
杆AB 与杆AD 的夹角为o 30,杆AB 与杆2O B 垂直。
E 为杆1O A 中点,F=ql ,M=32ql 。
各杆重量以及各处摩擦不计,试求杆AB 的内力。
五、已知1O 和2O 是固定铰链,A 、B 是滑动铰链。
圆盘1C 的半径为r ,质量为m ,绕1O 作匀速转动,角速度为 。
杆AB 长为l=2r ,质量为m 。
圆盘22C 半径R=r ,质量为3m 。
各处摩擦不计,试求系统的动能、动量、以及对固定点1O 的动量矩。
六、已知圆盘C 半径为r ,重量m 。
杆BD 长为l=2r ,质量为m 。
绳子OA 与圆盘C 在A 点相接,且绳子处于铅垂方向。
杆BD 与圆盘C 在B 点焊接。
杆BD 的另一端D 与滑块铰接。
滑块和绳子质量不计且滑到光滑。
系统由静止释放,求滑块的约束力、绳子拉力以及圆盘的角加速速。
北京理工大学期末考试试卷——理论力学【学弟学妹注意了,每年的题都差不多,只改数字!】
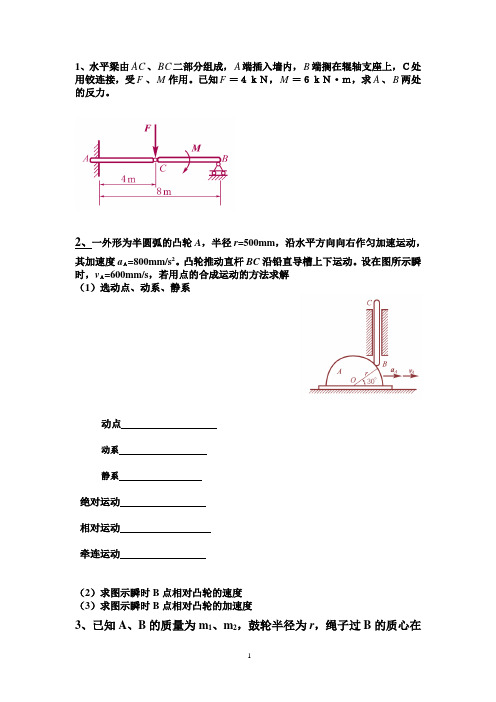
1、水平梁由AC、BC二部分组成,A端插入墙内,B端搁在辊轴支座上,C处用铰连接,受F、M作用。
已知F=4kN,M=6kN·m,求A、B两处的反力。
2、一外形为半圆弧的凸轮A,半径r=500mm,沿水平方向向右作匀加速运动,
=800mm/s2。
凸轮推动直杆BC沿铅直导槽上下运动。
设在图所示瞬其加速度a
A
=600mm/s,若用点的合成运动的方法求解
时,v
A
(1)选动点、动系、静系
动点
动系
静系
绝对运动
相对运动
牵连运动
(2)求图示瞬时B点相对凸轮的速度
(3)求图示瞬时B点相对凸轮的加速度
3、已知A、B的质量为m1、m2,鼓轮半径为r,绳子过B的质心在
常力偶M 作用下,轮B 拖动A 沿倾角为θ的斜面运动,不计摩擦试求物块沿斜面向上运动S 时,A 的速度、加速度及轮轴O 处的约束
力。
1、外伸梁受力如图,求支座反力
2、刚架受力如图,F=5KN, M=2.5KN.m 求支座处的约束力(长度单位为m )
B
M
3、曲柄OA 长为r ,以角速度ω转动,圆盘半径为R ,在固定水平面上只滚不滑。
试在图上画出作平面运动的构件的速度瞬心,并求图示
瞬
时
B
点
的
速
度。
4、平面力系如图,已知F1=F2=F,M=Fa
若将力系向O 点简化,试计算该力系主矢和主矩的大小
5、均质杆长为l ,重P ,可绕水平轴O 转动。
在图示瞬时杆的角速度为ω,角加速度为α,试求惯性力系向点O 简化结果,并将结果画在图上
a
a
O。
北京理工大学理论力学--1-A卷试题及答案26页PPT文档

如图所示,且 F = ql/2 ,M = 2ql 2 ,若不计各构件自重和各
10 接触处摩擦,试用虚位移原理求固定端 O 处的约束力偶矩。
11
解
学 年
(1) 三角形分布载荷的等效合力:
D
F
第 一
(共2分)
学 三角形分布载荷的等效合力为
期 理 论
1
A
Fq
q2 2
3l
3ql(1分) M
力
C
30°
q
Fq
3r
OA 6 3r
0 2(2 rr 0)r21 2r
2 0
0
OA
5 3 18
02
aBn D D r aDn
(顺时针)
ar
OA OA
aet
30°
B A
aen aC
A 考 试
(2分) R
题
A 卷
O1
4
BRY 二、(15分)图示平面结构由直杆 AC 、BD 、CD 和 GH 相
互铰接而成,已知 AG = GC = CD = GH = DH = l ,BH = 3l/2 ,
生虚转角 δ 1 ,点 P1、P2 分别为杆 AB 、AD 的虚速 度瞬心。(1分)
杆 OA :δrAOA δ1
δrA
A
M
δ 2
C 30° δ 3
δrD 2l
Fq
3l
一 学
4lδ1
期 理
杆 AB :δrAP1Aδ2
论 力
2lδ2
B P1 δ 1 δrB MO
4 3l 3
3l
O
学 A
δ22δ1 (2分)
对于动点由加速度合成定理得到 a a a B a e n a e t a r a C
北师大理论力学习题答案6第六章思考题

图s6.1 图s6.4图s6.5 第六章 质点组动力学思6.1答:这个说法不对。
应注意质心是空间的一个位置矢量为i iC m M=∑r r 的几何点,质心速度为几何点的速度,并不是位于质心处的质点的速度。
O 为固定点,只说明位于O 的质点速度为零,此时质心速度并不为零。
思6.2答:从本质上说, 质心是一个空间几何点,不是一个具有一定质量的质点。
另一方面,我们为了使质点组整体运动的图像比较清晰和简化动量、角动量、动能的计算,我们假想一个质量为i M m =∑的质点位于质心,具有速度c υ。
这个假想质点的运动遵从质心运动定理,它的动量即为质点组的总动量,它对固定点的角动量为c c M ⨯r υ,并具有动能12c M υ。
引入假想质点是一种手段,它不反映问题的实质,所以并不意味着真有一个质点位于质心。
思6.3解:系统质心即为球心,按定义可知系统总动量 m =p υ思6.4答:由于半圆柱在水平方向不受力,质心的初速度为0,所以质心C 的运动轨迹是一条沿竖直方向的直线。
思6.5答:初始时系统对Oz 轴的总动量0z L =,从开始跑动后,人绕Oz 轴作圆周运动,角速度为11ω=ωk ,盘则沿相反的方向转动,其角速度22ω=-ωk 。
圆盘开始转动后,系统受轴承施与的摩擦力矩0z M >(系统所受其余外力对Oz轴力矩均为零)。
在外力矩z M 的作用下,系统动量矩z L 由零开始逐渐增大,到人停止跑动之时,z L 达最大值。
人在停止跑动过程中,圆盘也逐渐停止转动,人停止跑动后,人与盘一起将继续沿人跑动的方向绕Oz 轴转动。
人停止跑动后,圆盘的转动方向改变了,所以受到的摩擦力矩的方向也变为0z M '<,这时系统在外力矩z M '图s6.10 的作用下,总角动量逐渐减小而趋向于零,因此,人与圆盘一起将逐渐趋于静止。
思6.6答: 由于圆盘与轴间的相互作用比较复杂, 把轴包括在质点组内, 这样轴和盘之间的相互作用就可看作是内力。
北理工理论力学第6章

′ 的力偶组成的力螺旋。 于是,力系简化为由力 FB 与力偶矩为 MO的力偶组成的力螺旋 力系简化为由力
建立直角坐标系Oxyz, 则该力螺旋的中心轴[设 P(x, y, z)为其上任一点]方程为
FRy FRx FRz = = x − xB y − yB z − zB
或由 MP = pFR ,而 MP = MO −OP × FR 得到
空间一般力系向任一点O简化得到一个力和一个力偶。 力的作用线过简化中心,其 力矢= 力系的主矢FR 偶 力 矩 力偶的力偶矩与该力系对简化中心的主矩,即 力 的 偶 = MO
FR 和 MO 的不同情况可分为以下几种情形:
(1) 平衡力系: 平衡力系:
FR = 0
MO = 0
力系为零力系,即平衡力系;
力螺旋的概念
方向一致 F ⋅M > 0
M // F
右手力螺旋 左手力螺旋
F
M M F
方般力系向某点的简化
一般力系向某点简化
F (i =1,2,⋯, n) 作用于同一刚体上点 Di 上 i
点O为刚体上任一确定点, 根据力的平移定理 力的平移定理,将力系中各力均向点O平移,得到 力的平移定理 共点力系 F′ (F′ = F ) (i =1,2,⋯, n) 作用于点O i i i 力偶系
MO 主矩 FR ⋅ MO 第二不变量
力系最简形式 平衡 合力偶 合力 合力 力螺旋
=0
=0 ≠0 ≠0
表明:
=0 ≠0 =0 ≠0
=0 =0 =0 =0 ≠0
FR和 MO完全确定了力系简化的最简形式,它们是力系的两个极 其重要的特征量。
第二不变量 FR ⋅ MO = 0 ⇒ 平衡力系 合力 合力偶
哈尔滨工业大学理论力学教研组编,《理论力学》(第六版)教学大纲

《理论力学》教学大纲课程编码:3597英文名称:Theoretical Mechanics总学时:80 实验:上机:适合专业:土木工程一、课程内容及要求本课程主要内容:对质点、质点系的刚体的机械运动(包括平衡)的规律有较系统的理解,掌握其中的基本概念,基本理论和基本方法及其应用。
学习重点:1.熟悉各种常见约束的性质,对简单的物体系统,能熟练地取分离体并画出受力图。
2.能运用平衡条件求解单个物体和简单物体系的平衡问题(包括考虑滑动摩擦的问题)。
对平面问题要求熟练。
3.熟悉刚体平动、定轴转动和平面运动的特征,并能熟练地计算刚体的角速度和角加速度、刚体内各点的速度和加速度,包括简单机构的运动分析。
4.掌握运动合成和分解的基本概念和方法。
熟练掌握点的速度合成定理和牵连运动为平动时的加速度合成定理的应用。
5.能正确地列出质点运动和刚体运动(包括刚体定轴转动和平面运动)的动力学微分方程并能求解有关的问题。
6.熟练掌握动力学普遍定理及相应的守恒定理,能熟练选择和综合应用这些定理去求解工程中简单的理论力学问题。
7.能掌握虚位移原理的有关概念及其应用。
学习难点:1.常见约束的性质,对简单的物体系统,能熟练地取分离体并画出受力图。
2.能运用平衡条件求解单个物体和简单物体系的平衡问题(包括考虑滑动摩擦的问题)。
对平面问题要求熟练。
3.掌握描述点的运动弧坐标法,能求点的运动方程,并能熟练地计算点的速度、加速度及其有关问题。
4.掌握运动合成和分解的基本概念和方法。
熟练掌握点的速度合成定理和牵连运动为平动时的加速度合成定理的应用。
掌握牵连运动为定轴转动时加速度合成定理及其应用。
5.能理解并熟练计算动力学中各基本物理量(动量、动量矩、动能、冲量、功、势能等)6.能正确地列出质点运动和刚体运动(包括刚体定轴转动和平面运动)的动力学微分方程并能求解有关的问题。
7.熟练掌握动力学普遍定理及相应的守恒定理,能熟练选择和综合应用这些定理去求解工程中简单的理论力学问题。
北京理工大学理论力学B期末总复习

理论力学B研究对象:机构—物体+ 接触点(约束)研究问题:已知主动件的运动求从动件的运动求解结果:点的轨迹、曲率半径、速度、加速度;刚体的角速度和角加速。
:求解方法矢量描述法分析描述法——建立坐标系,由已知条件列写运动方程,基于运动方程进行求解。
——通过刚体上不同点速度、加速度所满足的矢量方程进行求解。
❒分析法必须在一般位置建立运动方程;方程可能是显函数形式、也可能是隐函数形式;注意运动方程对时间的导数与所求量间的关系❒矢量法当运动方程不易建立,或只求某瞬时的运动量用矢量法;注意正确判断刚体的运动形式(平移和瞬时平移;转动和瞬时转动的区别和联系),熟知其上各点速度、加速度的计算式和关系;注意❒矢量法一定要根据具体问题列写相应的矢量方程注意♉两物体的接触点固结在一起,无相对运动——该接触点有惟一的轨迹、速度、加速度。
♉两物体的接触点未固结在一起,有相对运动——该接触点实际为两个物质点,这两点的轨迹、速度、加速度一般不完全相同。
——满足第3章复合运动的矢量关系——满足第2章刚体的平面运动的矢量关系❒矢量法解矢量方程得到所要求的未知量;注意♉根据已知条件和运动学知识,将方程各量所反映的方位关系以矢量图的方式表示出来♉根据所画出矢量图,求解矢量方程——几何法,解三角形的方法;——解析法,将矢量方程沿某一轴投影,得到代数方程后进行求解的方法。
αAa ωAv A 刚体平面运动一般平面运动:公式速度(点的速度、图形的角速度):基点法、瞬心法、速度投影定理、直接求导法。
加速度(点的加速度、图形的角加速度):基点法、瞬心法、直接求导法=+B A BAv v v t n =++B A BA BAa a a a 任意两点之中点速度、加速度)(21B A C a a a +=1()2C A B v v v =+ABBa Aa ,ωαCBA v Av B v nBA a t BAa BaB注意圆轮在固定水平面上作纯滚动则圆轮轮心O 的速度v O ,加速度a O 大小若圆轮半径r ,圆轮的角速度ω,角加速度αO v r ω=O a r α=注意速度瞬心点P 的加速度不为零。
北京理工大学 理论力学 桁架

以各个节点为研究对象的求解方法
求 解 要 点
1. 逐个考虑各节点的平衡、画出它们 的受力图。 2. 应用平面汇交力系的平衡方程,根 据已知力求出各杆的未知内力。 3. 在受力图中,一般均假设杆的内力 为拉力,如果所得结果为负值,即 表示该杆受压。
节点法适用于求解全部杆件内力的情况
Theoretical Mechanics 返回首页
Theoretical Mechanics
返回首页
§6.6 刚体系统的平衡· 静定与超静定概念
桁架的基本假设
Theoretical Mechanics
返回首页
§6.6 刚体系统的平衡· 静定与超静定概念
桁架的工程应用
Theoretical Mechanics
返回首页
§6.6 刚体系统的平衡· 静定与超静定概念
轴向压缩内力
返回首页
§6.6 刚体系统的平衡· 静定与超静定概念
内力
理想桁架的内力特点: 1、内力是沿着杆轴线作用的;
2、同一杆件各横截面上的内力都相等。
Theoretical Mechanics
返回首页
§6.6 刚体系统的平衡· 静定与超静定概念
Theoretical Mechanics
返回首页
Theoretical Mechanics 返回首页
§6.6 刚体系统的平衡· 静定与超静定概念 课堂讨论: 如何计算杆 DG的内力?
B D G J
例题 例题
C
O
I
A
E
H
K Fp
L
Theoretical Mechanics
返回首页
§6.6 刚体系统的平衡· 静定与超静定概念 结果:
B D
北理工理论力学试题

请统考生答一、三、四、五、六题请单考生答一、二、三、五、六题一、基本概念题(共40分)1)长方体的边长分别为a、b、c。
在顶点A上作用如图所示的已知力F,求该力对图示x、y、z轴的矩。
(6分)2)在图示四面体的三个顶点A、B、C上分别作用着三个力F1、F2、F3,它们的大小均为F,方向如图所示,已知OA=OB=OC=a。
试问:(a)、(b)两种情况下力系的最简形式分别是什么?(合力、合力偶、力螺旋、平衡)。
(6分)3)图示平面机构,杆OA绕O轴作定轴转动,通过连杆AB带动圆轮C在水平面上作纯滚动。
已知杆OA的角速度转向如图所示,试画出图中D、E两点的速度方向。
(5分)4)曲柄OA以角速度w 绕O轴作顺时针转动,借助滑块A带动折杆BCD在图示平面内绕B轴转动。
若取OA上的A点为动点,动系与折杆BCD固连,试画出图示瞬时动点的科氏加速度的方向。
(5分)5)均质细杆AB,长为l,质量为m,中点为C。
杆AB的两端点分别沿水平地面和铅垂墙面滑动。
已知图示瞬时A点速度为V A,求此时系统的动能、动量以及分别对O、C两点的动量矩。
(8分)6)半径为r,质量为m的均质圆轮O在水平面上作纯滚动,从而带动长为l,质量为m1的均质杆OA的A端在同一水平面上滑动。
已知圆轮的角速度、角加速度分别为w 、e ,转向如图所示。
试分别写出圆轮、杆的达朗伯惯性力系的简化结果。
(5分)7)图示机构中杆OA以光滑铰链B与杆BC相连接。
在图示位置时,当杆OA有一虚转角d q 时,试分别计算图示主动力偶矩M,主动力F的虚功。
(5分)二、在图示结构的AD杆上作用着力偶矩为m的力偶,在节点C上作用着铅垂力P。
AD、CD、BC的杆长均为a 。
若不计各杆自重和各连接处摩擦,试求:(1)CD杆的内力;(2)固定端B处的反力。
(15分)三、已知平面四连杆机构ABCD的尺寸和位置如图所示。
若杆AB以等角速度w =1rad/s在绕A轴转动,试求此时C点的加速度的大小。
理论力学 《理论力学A》课程简介

《理论力学A》课程简介课程代码:课程名称:理论力学A英文名: Theoretical Mechanics A课程类别:专业基础课学时学分:90学时6学分先修课程:高等数学、大学物理授课对象:土木工程本科、土木工程(职师)专业开课单位:土木工程学院工程力学系教材:《理论力学》(Ⅰ)、(Ⅱ)第六版哈尔滨工业大学理论力学教研室编高教出版社2002.8 课程简介:理论力学是工科大学的一门重要的技术基础课。
它既是各门后续力学课程的理论基础,又是一门具有完整体系并继续发展着的独立的学科,而且在许多工程技术领域中有着广泛的应用。
其内容分为三部分:静力学、运动学和动力学。
静力学主要研究力的基本性质,物体的受力分析与受力图及各种力系的简化与平衡;运动学主要研究物体运动的几何性质。
包括点的运动、刚体基本运动、点的合成运动;刚体平面运动。
动力学主要研究物体的机械运动与作用力之间的关系。
包括质点动力学基本方程;动量定理;质心运动定理;动量矩定理;刚体转动惯量,刚体定轴转动动力学方程;刚体相对于质心的动量矩定理,刚体平面运动微分方程;动能、势能,动能定理;质点和刚体的达朗伯原理;虚位移原理,机械振动基础,动力学普遍方程和第二类拉氏方程。
《理论力学A》课程教学大纲课程代码:课程名称:理论力学A英文名:Theoretical Mechanics A课程类别:专业基础课学时学分:90学时6学分先修课程:高等数学、大学物理授课对象:土木工程本科、土木工程(职师)专业开课单位:土木工程学院工程力学系教材:《理论力学》(Ⅰ)、(Ⅱ)第六版哈尔滨工业大学理论力学教研室编高教出版社2002.8 参考书目:《理论力学》同济大学同济大学出版社1992《理论力学习题解答》陈明编哈尔滨工业大学出版社1998《理论力学思考题解与思考题集》哈尔滨工业大学理论力学教研室编哈尔滨工业大学出版社2000《理论力学学习辅导》哈尔滨工业大学理论力学教研室编高教出版社2003一、课程目的和任务理论力学是一门理论性较强的技术基础课。
理论力学第三版课后答案郝桐生
理论力学第三版课后答案郝桐生【篇一:理论力学a72】txt>课程编号: 070000140英文名称: theoretical mechanics适用专业:力学、机械类专业等学分数: 4.5 学时数: 72学时执笔者:王钦亭审核人:批准人:编写日期: 2013年6月一、课程性质与目的理论力学是工科高等院校机械、土建等专业本科生的一门重要的技术基础课。
它是各门力学课的基础,并在工程技术领域有着广泛的应用。
本课程的任务是使学生掌握物体机械运动的一般规律和研究方法,为学习有关的后续课程打好力学基础;使学生初步学会应用理论力学的理论和方法,分析、解决一些简单的工程实际问题;培养学生的逻辑思维能力和基本工程素质,同时培养学生的创新精神和辩证唯物主义世界观。
二、课程教学的主要内容及学时分配本课程主要讲述物体机械运动的一般规律,包括静力学、运动学和动力学三个主要部分。
本课程的难点是某些较为复杂的动力学系统问题。
重点是力学分析方法的训练和基本工程素质的培养。
静力学(24学时)第一章静力学公理及物体的受力分析(4学时)知识要点:静力学公理及推论;常见约束及约束反力的表示方法,物体受力分析与受力图的画法。
目标要求:理解5个静力学公理及2个推论,并注意它们各自的应用条件;掌握常见约束的性质和约束反力,能够对简单物体进行受力分析,掌握受力图的画法。
采用课堂教学,4学时。
第二章平面汇交力系与平面力偶系(4学时)目标要求:掌握求解平面汇交力系(包括力系合成和平衡问题的求解)的几何法;能熟练计算力的投影、力对点之矩;能够正确地理解合力矩定理和平面力偶等效定理;能够熟练应用平面汇交力系的解析法或平面力偶系的平衡方程求解简单的工程实际问题。
采用课堂教学,4学时。
第三章平面任意力系(8学时)知识要点:用解析方法研究平面任意力系的合成与平衡;讨论平面任意力系的合成结果与平衡条件;应用平面任意力系的平衡方程求解简单的工程实际问题。
北理工考研机械原理大纲及模拟题

第一章机构结构分析(6 学时)机构基本概念自由度计算自由度计算注意问题杆组分析高副低代第二章机构运动分析(4 学时)机构瞬心机构运动分析的矢量描述第三章平面连杆机构及设计( 6 学时)•连杆机构基本特性连杆机构设计按急回性设计按机构导引设计•按函数关系设计•按轨迹设计•连杆曲线第四章凸轮机构及设计( 6 学时)•凸轮机构构成•相对运动位置关系•凸轮廓线设计•压力角与基圆半径•运动失真第五章齿轮机构及设计(10 学时)…•基本啮合传动定律•渐开线形成及特性•齿轮基本尺寸与参数•啮合传动原理与啮合传动计算•齿轮范成加工的根切现象•变位齿轮•传动类型•其它齿轮的啮合传动特点第六章轮系( 4 学时)•定轴轮系传动比计算•周转轮系传动比计算•复合轮系传动比计算第七章机械运转及速度波动的调节( 4 学时)•机械系统运转•周期性速度波动调节•飞轮转动惯量计算第八章机械平衡( 2 学时)•刚性转子静平衡•刚性转子动平衡第九章其它常用机构简介( 2 学时)*•间歇运动机构•万向传动机构•差动螺旋机构•广义机构简介第十章机器人机构简介( 2 学时)•空间机构概述•开链机构•闭链机构•常用机器人机构第十一章机构运动方案及创意设计( 2 学时)•机构组合设计•机械运动循环图•机械运动方案选择与评估•机构创新设计概述机动(2 学时)实验教学(6 学时):可选作实验内容为:•机构运动简图测绘与分析( 2 学时)•齿轮范成加工原理( 2 学时)&•刚性转子的动平衡( 2 学时)•机构创意设计及组装( 2 学时)•机械运动参数测试实验( 2 学时)课外开放性实验(选做):•机械系统测绘与分析•机构创意设计与组装•机电系统创意设计与组装机械原理考试大纲1 .考试内容①平面机构的结构分析:平面机构的自由度计算;机构具有确定运动的条件;机构的高副低代、结构分析和组成原理。
②平面连杆机构的设计与分析:平面连杆机构的类型;平面连杆机构的基本性质和基本知识;平面连杆机构的设计;平面连杆机构的运动分析。
2012年北京理工大学考研专业课848理论力学大纲
848 理论力学(1)考试要求①了解:点的运动描述,刚体的平移、定轴转动和平面运动的描述,约束和自由度的概念,力系的特征量及力系简化的最简形式,桁架的特点及内力计算方法,摩擦定律,刚体的质心和规则刚体(均质细长直杆、圆盘、圆环等)对中心惯性主轴的转动惯量,动力学三个基本定理及其守恒定律,达朗贝尔原理与动量原理的关系,利用虚位移原理求解平衡问题的特点。
②理解:用弧坐标表示点的速度和加速度,平面运动刚体的角速度和角加速度,速度瞬心,加速度瞬心,曲率中心,绝对运动、相对运动和牵连运动(尤其是相对速度和相对加速度,牵连速度和牵连加速度,科氏加速度),常见约束的约束力特点,纯滚动圆盘的运动描述和所受摩擦力特性,物体平衡与力系平衡的差别,转动惯量的平行轴定理,刚体的平移、定轴转动、平面运动的动能、动量、动量矩及达朗贝尔惯性力系的简化结果的计算,虚位移概念和虚位移原理。
③掌握:用速度瞬心法、速度投影定理,两点速度关系的几何法或投影法对平面运动刚体系统进行速度分析,用两点加速度关系的投影法或特殊情况下加速度瞬心法对平面运动刚体系统进行加速度分析,用点的速度合成公式的几何法或投影法以及加速度合成公式的投影法对平面运动刚体系统进行运动学分析,力系的主矢和对某点的主矩的计算,最简力系的判定,物系平衡问题的求解(尤其要掌握通过巧妙选取研究对象和平衡方程对问题进行快速求解),带摩擦物体系统平衡问题的求解,物系动力学基本特征量(动能、动量、动量矩、达朗伯惯性力系的等效力系等)的计算,动能定理的积分或微分形式的应用,动量守恒、质心运动守恒和质心运动定理的应用,对定点的动量矩定理、相对于质心的动量矩定理及其守恒定律的应用,用达朗贝尔原理(动静法)求解物系的动力学问题(包括动力学正问题:已知主动力求运动和约束力,以及动力学逆问题:已知运动求未知主动力和约束力),用虚位移原理求解物系的平衡问题(特别是利用虚位移原理求解作用于平衡的平面机构上主动力之间应满足的关系,会利用虚位移原理求解平面结构的某个外部约束力或求解其中某根二力杆的内力)。
哈工大理论力学课件第六章(2024版)

x x(t) y y(t) z z(t)
vx x(t) vy y(t) vz z(t) ax vx x(t) ay vy y(t) az vz z(t)
r xi yj zk
s s(t)
vt
v
ds dt
vn vb 0
dv d 2s at dt dt 2
an
v2
x x(t) y y(t)
试求出任一时刻动点的切向加速度、法向加速 度和轨迹曲率半径的表达式
解:
vx x(t) vy y(t)
at
dv dt
xx yy x2 y 2
v x 2 y 2
ax vx x(t) ay vy y(t)
a
ax2
a
2 y
an
a2 at2
xy xy x2 y 2
3. 自然轴系基矢量与矢径坐标之间的关系 • 切向基矢量
τ dr ds
τ dr 1 ds
• 主法向基矢量
dτ dτ d d 1
ds d ds
ds
1 dτ 1 d
n dτ
ds
• 副法向基矢量
b τn
3. 速度
dr τds
4. 加速度
v dr ds τ vτ dt dt
zM
v r (x i y j z k)
(vx i vy j vz k)
vx x vy y vz z
r
z
k iO
j
x
xy
ax x ay y az z
y
§6-3 自然法
1.运动方程 2. 自然轴系
s s(t)
切向基矢量 主法线单位矢量 n
副法线单位矢量 b n
曲线在P点的密切面形成
北理工《工程力学(1)》课程学习资料(六)13

北理工《工程力学(1)》拓展资源(六)第六章 力系的平衡力系的简化与平衡一、目的要求1、平面汇交力系(多个力)简化与平衡的几何法和解析法,并能应用平衡条件求解平面汇交力系的平衡问题。
2、力偶系的简化与平衡。
3、了解空间力系向一点简化的方法,明确空间力系合成的四种结果。
4、深入理解平面力系的平衡条件及平衡方程的三种形式。
5、能熟练地计算在平面任意力系作用下单个刚体和物体系统平衡问题。
6、理解简单桁架的简化假设,掌握计算其杆件内力的节点法和截面法及其综合作用。
7、会应用各种形式的空间力系平衡方程求解简单空间平衡问题。
8、对平行力系中心和重心应有清晰的概念,能熟练地应用坐标公式求物体的重心。
9、牢固掌握滑动摩擦的性质,深刻理解库仑摩擦定律的内涵,熟练求解考虑滑动摩擦时的平衡问题(解析法、几何法)。
了解全反力、摩擦角、自锁等概念,了解滚动摩擦现象。
二、基本内容1.平面汇交力系的简化平面汇交力系可合成为通过汇交点的合力,其大小和方向等于各分力的矢量和。
即∑==+++=n i i11F F F F F n 2R合力R F 的大小和方向可用力三角形法则或力多边形法则得到。
作出图示首尾相接的开口的力多边形abcde ,封闭边矢量即所求的合力。
通过力多边形求合力的方法称为几何法。
平面汇交力系平衡的必要和充分条件是:力系的合力等于零。
其矢量表达式为 ∑==0F F R力系平衡的几何条件是:力系的力多边形自行封闭。
合力投影定理:合力在某轴上的投影等于各分力在同一轴上投影的代数和。
平面汇交力系平衡的必要和充分条件是:各力在两个坐标轴上的投影的代数和分别为零。
即 00x y FF ⎫=⎪⎬=⎪⎭∑∑两个独立的平衡方程,可解两个未知量。
2.力偶系的简化与平衡条件(1)力偶系的简化力偶系可简化为一合力偶,合力偶矩等于各分力偶矩的代数和,即 i M M ∑=力偶系平衡的必要和充分条件是:力偶系中各力偶矩的和等于零,即∑=0M 或∑∑∑===000z y x M M M3. 空间力系的简化与合成的最终结果1)空间力系向已知点O 简化力的平移定理:可以把作用在刚体上点A 的力F 平行移到任一点B ,但必须同时附加一个力偶,这个附加力偶矩等于原来的力F 对新作用点B 的矩。
吉林大学理论力学课件-第6章

◇ 一点二系三运动
牵连速度(
v ) e
a ) e
牵连加速度(
◇ 一点二系三运动
牵连速度(convected velocity) ( v ):某瞬时动系上 e 与动点相重合的那一点(称为牵连点)相对于定 系的速度 牵连加速度(convected acceleration) (a ):某瞬时 e 动系上与动点相重合的那一点(称为牵连点)相对 于定系的加速度 牵连点:①指动系上的点即刚体上的点 ②该瞬时与动点相重合
v AB
* *
y¢
x ¢
w
q
牵连运动:绕O轴的定轴 转动
◇ 应用举例
例 题 2 题
动点:顶杆上A点 定系:固定于机架 绝对运动:铅垂直线运动 相对运动:圆周运动 牵连运动:绕O轴的定轴 转动
● A ● 1 1
3 、速度分析及其求解
v a = v r + v e
方向 铅垂 ⊥ CA ⊥OA向左 大小
动点:小环(沿金属丝滑动) oxyz ):固定于地面 定系(
x ¢ ¢ 动系( o¢ ¢y z ):固连于刚性金属丝
绝对运动轨迹
☆ 三 种 运 动 轨 迹 x
z¢ x¢
P¢
相对运动轨迹 Dr ′ Ⅱ
z
o¢
Ⅰ Ⅰ
y¢
Dr Dr 1
P, P 1 y O
P¢ 1
t 瞬时
v a
■
点的速度合成定理
◇ 速度合成定理 ◇ 应用举例 ◇ 讨 论
◇ 速度合成定理 速度合成定理
动点:小环(沿金属丝滑动)
z¢
o¢
x¢Biblioteka y¢ z 刚性金属丝 y
北京理工大学工程力学6-1-j5b

§ 5
静力学基本概念
§ 5.2 力系的主矢和力系对某点的主矩
1.力系的分类 从力系中力的作用线之间关系可区分为: 共线力系 平面力系 空间力系 平行力系 汇交力系 力偶系 任意力系
13
F1=F2=F 解: M ( F1 , F2 ) M A ( F1 ) M C ( F2 ) z a=5m AC F1 CA F2 b=4m C(0,0, c) AC ai ck c=3m F1 c B(0,b,0) F1 F sin j F cos k O b 4 3 y a
一般力系
14
2.力系的特征量 力系的特征量——表征力系的整体作用效应 (1)力系的主矢 力系的主矢 力系中各力的矢量和,记为 力系中各力的矢量和
FR
(2)力系对某点的主矩 力系对某点的主矩 取矩心为O,力系中各力对O点之矩的矢量和,记为 M O
FR
F3
i1
n
Fi FRxi FRy j FRzk
静力学基本概念
应用力对轴的矩之解析表达式求解。
因为力在坐标轴上的投影分别为:
Fxx F sin , Fyy 0, Fzz F cos
l
l
b
3.力偶和力偶矩 定义 大小相等、方向相反、不 共线的两个力 F1 和 F2 组成的力系称为力偶 力偶,记 为 ( F1 , F2 ) 。
对点O的主矩
求对点C的主矩,利用两点主矩关系: M C M O CO FR z B(0,0,2a) CO 3i 3 j FR 4i 3 2 j 3 2k A(0,0,a) 45º F2 F1 M C M O CO FR O y i j k CO C(a,a,0) 18 2i 12 j 3 3 0 x 4 3 2 3 2 9 2i (12 9 2 ) j (12 9 2 )k
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6章第6章力系的平衡§6.1 力系的平衡条件及其平衡方程 §6.2 桁架的内力计算 §6.3 考虑摩擦的平衡问题26.1.3物系的平衡问题刚体系统平衡的求解方法 一般解法——对于静定的刚体系统,未知约束力总数等于独 立平衡方程数,无论空间问题还是平面问题,对每个刚体列 出其全部平衡方程,得到一线性代数方程组。
最终归为求解 线性方程组的数学问题。
一定可解出全部未知量(包括外部 和系统内部的约束力)。
分析解法——根据问题需要选取恰当的研究对象(可能为整 体,或几个相关物体的组合,或某一个物体),列写所需的 独立平衡方程,解出要求的未知量。
36.1.3物系的平衡问题分析解法求解刚体系统平衡问题的一般步骤¾ 选取恰当的分离体(研究对象)。
一般不只选一次,需分几次选取。
n个刚体组成的系统,最多只能选n次分离 体。
¾ 对分离体进行受力分析,画出受力图,并列出解题所需的平衡方程。
¾ 再选下一个分离体,重复上一个步骤。
如此反复,直到写出所有必须的方程。
¾ 解平衡方程,求出未知量。
(尽量一个方程解一个未知量,但有时也需联立求解各分离体得到的方程) 。
4例题6.11例: AB=l、BC=CD=a、AB ⊥ BC 、α = 60 、P、Q、MBPCQM已知, 约束力。
求固定端D处的BAαDMPCQFAyAα FAxFDy D M D FDx5例题6.11解答 解: (1)研究杆AB,受力如图 ∑MA = 0, − Pl cosα − M + FBC l = 0 (2)研究CD杆,受力如图 ∑Fx = 0, FCB cos 30 + Q + FDx = 0FBC = FCByFBCM P = + 2 lFCByCxFBCQBFDyMD D FDx3M 3 FDx = −(Q + + P) 2 l 4PFAy∑F = 0, − FCB sin 30F DyMFAx+ FDy = 0AB1 1 = P+ M 4 2l∑MMAPαCQC= 0, MD + FDx ⋅ a = 03M 3 M D = (Q + + P )a 2 l 4D6例题6.12D K C B Ⅰ如图所示,已知重力 G , DC=CE=AC=CB=2l ; 定 滑 轮 I 半径为 R , 动滑轮 II 半径为 r , 且 R=2r=l, θ=45° 。
试 求 : A , E 支座的约束力及 BD 杆所 受的力。
θAEⅡG7例题6.12解答解:1) 研究整体,受力如图. 1)研究整体,5 M = 0 , F × 2 × 2 l + G × l =0 ∑ E A 2D−5 2 FA = G 8FA A θK C B Ⅰ∑Fx = 0 , FA cos 45 + FEx = 05 FEx = G 8FEyE∑F = 0y, FA sin45 + FEy −G = 013G FEy = 8FExD KⅡ2)研究DCE , 受力如图.FD BFTK F M = 0 , F cos 45 × 2 l + F × l − F × 2 l = 0 ∑ C Cx DB TK Ex C FC y∵ FT K = G 2GFDB =3 2G 8FEyEFEx8例题6.13 已知如图.求A,C ,D处的约束力.aAM = FN aMB K C E解:1) 研究ABE, 受力如图. 1)研究∑M = 0i, M − FA ⋅ a = 0FA =θD受力如图. 2)研究BD+CK , ′ =0 ∑Fy = 0 , FC sinθ − FNM FC = a sin θFD = M cot θ aFAA BMFN F N′K C D E∑ Fx = 0, FC cosθ − FD = 0BFCFD9例题6.14 已知如图. AD=DB=BE=EC=DE=a、求DE杆在 D,E处的约束力. 研究整体,受力如图. 解:1) 1)研究整体,∑MA= 0 , M − FB ⋅ 2a + P ⋅ a = 0M P FB = + 2a 2CP2)研究BEC , 受力如图.FAyAMD E∑MC= 0 , FBa + FExa 3a − FEy = 0 2 2′ FEy = FEy3FEx − FEy = −2FBFAxCB受力如图. 3)研究DE ,′ a−M =0 ∑MD = 0 , FEy′ = FEyPFBFCxFEx = − 3P ′ = FEx 3M aFC yE′ − FDy = 0 ∑ Fy = 0 , FEyF DyM = a3 P 3yFD yFEyFExBMF E′yE F′ ExFB∑Fx′ =0 = 0 , FDx − FExFDx = −FDx Dx10例题6.15 求杆BCD上所受到的所有的作用力解:1) 研究整体,受力如图. 1)研究整体,FN DD50 0∑M ∑MA= 0 , FT cos 30 × 800 − FN ×1200 + 24000 = 0 (1) DC3050 02)研究BCD ,受力如图.BFT24N·m4 3 4 3B50 0=0, FT cos 30 × 400 + FT sin 30 × 300 − FND × 800 = 0 (2)DA联立 (1)、(2)可解出 FN = 288N , FT = 464N 联立(1)、(2)可解出FAyFAx∑F = 0x, FN D − FT cos 30 + FBx = 0 − FT sin 30 + FBy = 0FBx = 114NFBy = 232NFN DD C∑Fy = 0FTBFByFBx11例题6.16 O1A,AB,O2B,CD四杆光滑铰接如图,求在图示载荷作 用下杆AB 在A,D,B 三处的受力。
(已知O1C=CA=AD=DB=BE=O2E=a) FBy FAy D 思路一: FAx A B A F D FBx Dx B 1) 研究整体 1)研究整体 F∑MO1= 0, → F2 yC O1MFDyE2) 研究O2 2)研究 2BF1 xF1 yF2 xPO2′y FD DCF B′y∑ M = 0, → F ′ ∑ F = 0, → F ′ 3) 研究CD ∑ M 3)研究O2 Bx′ FDxB E O2F2 y FC y′ FBxMyByFCxPF2 xF2 y12C′ ~ FDy ′ = 0, → FDx4)研究AB,列方程解出未知量例题6.16 O1A,AB,O2B,CD四杆光滑铰接如图,求在图示载荷作 用下杆AB 在A,D,B 三处的受力。
(已知O1C=CA=AD=DB=BE=O2E=a) 思路二:A C O1 D B EFAyFAxADFByFDxDCFDyBFBxF B′yMF1 xF1 yF2 xPO2′y FDM′ FDxB E O2′ FBxF2 yFCxFC yPF2 xF2 y13例题6.17证明:AB杆始终受压,且大小为F研究整体,受力如图. 1)研究整体, 解:1) x ∑M = 0 , FEb − Fx = 0 FE = FAFFAyb3)研究BC , 受力如图.FE∑F = 0x, FBx = 0, F (b − x) − FBy b − FBAb = 0FAxFByB∑M∑MC =0FFBxFCCxB FD y D4)研究BDE , 受力如图.DFBA=0 ,F′ a + F′ b + F b = 0 ′ =0 FBx = FBx Bx By E 2 2 2x FBy = − FE = − F b′ FBxF B′yFBA = FFDxEF (b − x) − FBy b − FBAb = 0FE14例题6.18 一种工具钳,手施加的力F=35N,试分析被夹物体M所受 的力。
几何尺寸如图示。
F 100 75 75 50D E60 60CB A 25G思路:FNFDEEH D CFFCx∑MC=0FN = 60.62ΝFEDFC yFByFGxFAE FHEFBxFEAB A∑Fx =0∑MB=015例题6.19 求桌腿EFG受到的所有作用力以及钢丝BD所受到的拉力E400 200 600思路:F GFExFFyFFxFEyA360 24080NB CD180EFNGF G400 400H80N 80N桌面AE整体D C F EA′ E FExABFAxH∑MH=0FAyC∑MF E′y=0AGFTD C F CxE FEx ′FNGFH yFHxFC yF E′y16例题6.19 解:1)研究整体,受力如图A360 24040080N200600B CD180E∑MH = 0, FNG ⋅ 800 − 80 ⋅ 600 = 02)研究桌面,受力如图FNG = 60NF G40080NH400∑MA′ ⋅ 1200 − 80 ⋅ 400 = 0 = 0, FEy′ ≈ 26.67N FEyA3)研究EFG,受力如图BD180E∑MF = 0, FEx ⋅ 360 − FEy ⋅ 600 − FNG ⋅ 400 = 0FEx ≈111.12NE∑Fx= 0, FFx − FEx = 0FFx ≈ 111.12NF GFNGFExG80NC FFHyH FHx∑Fy= 0 , − FEy − FFy + FNG = 0FFy ≈ 33.33N4)研究DE,受力如图FNGFFyFFxFEy A FAyFT′ E FExFAxD E C F Cx′ FEy F E′y′ FEx17∑MC′ ⋅ 600 − FEx ′ ⋅ 180 − FT ⋅ 180 = 0 FT ≈ 22.22N = 0, FEyFC y例题6.20 已知如图, 试求B 铰处约束力 . 铰处约束力. 研究整体,受力如图. 1)研究整体, 解:1)FK∑MC= 0 , −FBy ⋅ 2a = 0FBy = 0FByFC y受力如图. 2)研究DEK ,FBxFED45∑MB= 0 , F Dx a − 2 Fa = 0FCxF Dx = 2 FFKFAyA ′y FD DFDx F D yBEFAx3)研究ADB ,受力如图.∑MA= 0 , FDx ′ a + FBx ⋅ 2a = 0′ FDxFBy′ FDx = FDxFBx = − FBFBx18例题6.21 求CD杆在C,H,D三点处受到销钉的约束力. FAy 研究整体,受力如图. 1)研究整体, 解:1) ∑M = 0 , FCxa + M + F2 ⋅ 2a = 0 FAAD HF2 2ECx=−M − 2F2 aFAxa FC yF1 1MB a2)研究BE ,受力如图.∑MB= 0 , M + FEDa + F2a − F1a = 0CFED = − M + F1 − F2 aFCx a受力如图. 3)研究CD ,FEDF2 2EF1 1∑ Fx = 0 , FCx − FHx + FDE = 0 FED = FDE∑MH = 0 , FCx a − FCy a − FDE a = 0 2 2 2FHx2M = F1 − 3F2 − aFByMFBxFH y HFCxBFCy = − F1 − F2yFC yCD∑ Fy = 0 , FCy − FHy = 0FHxxFD EFHy = − F1 − F219例题6.22 求支座A、B处的约束力。