状态空间表达式的解
matlab状态空间表达式的解
标题:MATLAB状态空间表达式的解析一、概述MATLAB是一种非常常用的数学软件,用于分析、设计和模拟动态系统。
在控制系统理论中,状态空间表达式是描述线性系统动态行为的重要方法。
本文旨在介绍如何使用MATLAB对状态空间表达式进行解析和分析。
二、状态空间表达式简介状态空间表达式是一种描述线性时不变系统的数学模型。
通常由状态方程和输出方程组成。
状态方程描述了系统的演化规律,而输出方程则描述了系统状态和输出之间的关系。
三、MATLAB中的状态空间表示在MATLAB中,状态空间表示可以使用ss函数进行表达。
该函数的输入参数包括系统的状态方程系数矩阵A、输入矩阵B、输出矩阵C 和前馈矩阵D。
四、求解状态空间表达式1. 稳态响应分析在MATLAB中,可以使用sys = ss(A,B,C,D)定义一个状态空间模型,然后使用step(sys)绘制系统的阶跃响应曲线。
通过阶跃响应曲线可以分析系统的稳态性能。
2. 传递函数表示使用tf(sys)可以将状态空间表示转换为传递函数表示,这样可以更方便地分析系统的特性。
3. 稳定性分析使用eig(A)可以计算状态方程系数矩阵A的特征值,从而判断系统的稳定性。
如果系统的所有特征值都是负实数,那么系统是稳定的。
4. 频域特性分析使用bode(sys)可以绘制系统的频率响应曲线,这样可以分析系统在不同频率下的特性。
五、应用实例以电机控制系统为例,假设系统的状态空间表达式为:A = [-2 -1; 3 -4]B = [1; 0]C = [0 1]D = [0]可以使用以下代码在MATLAB中求解该系统:sys = ss(A,B,C,D)step(sys)tf_sys = tf(sys)eig(A)bode(sys)六、结语本文介绍了MATLAB中状态空间表达式的解析方法,并以电机控制系统为例进行了说明。
希望本文能够帮助读者更好地理解和应用状态空间表达式在MATLAB中的求解方法。
【武汉大学】线性系统状态空间表达式的解【现代控制理论】

• 这里定义的状态转移矩阵与前面定义的是一致的。
– 引入上述状态转移矩阵新定义,主要是为了使状态转移 矩阵的概念易于推广到时变系统、离散系统等,
– 使得有可能对各种类型系统的状态方程的解作统一描 述,更好地刻划系统状态运动变化的规律。
现代控制理论
武汉大学 自动化系 丁李
3.1.2.1状态转移矩阵基本定义
现代控制理论
武汉大学 自动化系 丁李
3.1.1.2拉氏变换法
– 对上式取拉氏反变换,即得齐次状态方程的解为
x(t)=L-1[(sI-A)-1]x0 – 下面讨论如何求解拉氏反变换L-1[(sI-A)-1]。
• 主要思想为将标量函数的拉氏变换与反变换平行推 广至矩阵函数中。
• 对标量函数,我们有
(s a)1 1 a a2 ... ak1 ...
• 由常微分方程理论知,该方程的解连续可微。 – 因此,该解经泰勒展开可表征为无穷级数,即有
x(t) q0 q1t q2t 2 qkt k
式中,qk(k=1,2,...)为待定级数展开系数。
现代控制理论
武汉大学 自动化系 丁李
3.1.1.1级数展开法
– 将所设解代入该微分方程,可得
(2) 计算矩阵指数函数eAt。
e At L1[(sI A)1]
L1
s
2
1 2
s
1
2 2
s 1 s 2
1 1 s 1 s 2 1 2
s 1 s 2
2et 2et
e2t 2e2t
et e2t
3.1.1 线性定常齐次状态方程的解
现代控制理论(第二章)
(1)
若初始时刻 时的状态给定为
则式(1)有唯一确定解:
若初始时刻从
开始,即
(2) 则其解为:
证明: 级数形式
和标量微分方程求解类似,先假设式(1)的解
(3) 为 的矢量幂
(4) 代入式(1)得:
(5)
既然式(4)是式(1)的解,则式(5)对任意时刻 都成立,故 的同次 幂项的系数应相等,有:
在式(4)中,令
e t e 2 t e t 2 e 2 t
x ( t ) L 1 ( s I A ) 1 x ( 0 ) L 1 ( s I A ) 1 B ( s ) U
s3
1
sIA1bU(s)(s1)(s2)
2
(s1)s(s2)1 01s
(s1)(s2) (s1)(s2)
eAtPeAtP1Pe0 1t
e0 2tP111
1et 20
02 1 e2t1 1
et e2t 2 1 2et e2t
et e2t
et 2e2t1 12et 2e2t et 2e2t
3)用拉氏变换法求解 e A tL 1 (s I A ) 1
s3
sIA1 2s
11 s3
(s
1)(s 2
或
(1)
即
2.5.2 Z 变换法
(2)
对于线性定常离散系统的状态方程,也可以来用 Z 变换法来求解。
设定常离散系统的状态方程是:
对上式两端进行 Z 变换,有: 或
线性时变系统的非齐次状态方程为:
且
的元素在时间区间
(17) 内分段连续,则其解为:
(18)
证明 线性系统满足叠加原理,故可将式(17)的解看成由初始状态
状态空间表达式的解

2020/6/4
***状态转移矩阵的基本性质**** 性质1:组合性质
e A e A t e A ( t ) ( t) () ( t )
性质2: e A ( t t) e 0 I ( t t ) ( t ) ( t ) I
性质3: 转移矩阵的逆意味着时间的逆转
e A 1 t e A t ( t) 1 ( t)
【例2-8】求下列状态方程在单位阶跃函数作用下的输出:
解:根据上面的式子
其中
, K=1
2020/6/4
在例2-6中已求的:
2020/6/4
其状态轨迹图可以MABLAB方便地绘出,如图所示: %Example Example 2-8 grid; xlabel('时间轴'); ylabel('x代表x1,----*代表x2'); t=0:0.1:10; x1=0.5-exp(-t)+0.5*exp(-2*t); x2=exp(-t)-exp(-2*t); plot(t,x1,'x',t,x2,'*') end
两边同时在
区间积分,得:
两边同时左乘 即:
并整理得:
2020/6/4
当初始时刻为t0=0时,初始状态x(t0)=x(0)时,其解为:
x (t) (t)x (0 ) 0 t (t )B() u d ,
当初始时刻为t0时,初始状态x(t0)时,其解为:
t
x (t) (t t0)x (t0 )t0 (t)B ()u d
1 t
1 t 2 ... 2!
(n
1 - 1)!
t
n1
0
1
t
...
(n
1 - 2)!
线性控制理论 第2章 状态空间表达式的求解
12t 2 0 2 2 2 t 1 2! 0 2 2 n t
1 2 2 1 t t 0 1 1 2! 1 2 2 1 2 t 2 t 2! 1 2 2 0 1 n t n t 2!
1
1 2 1 m 1 t t 2! (m 1)! t (2-21) 1 2 1 t 2! t 1 mm
证明 因
12 1 1 0 1 2 ,A A 0 1 1 1 mm 21
x(t ) Φ(t ) x(0),t 0
上式表明齐次状态方程的解,在初始状 态确定情况下,由状态转移矩阵惟一确定,
即状态转移矩阵包含了系统自由运动的全部
信息,完全表征了系统的动态特性。
定义2.1
线性定常系统状态转移矩阵 Φ(t t0 ) 是
满足矩阵微分方程和初始条件
(t t ) AΦ (t t ), t t Φ 0 0 0 Φ (t0 t0 ) I
(2-3)
(t ) b1 2b2t kbk t x
( k 1)
k
Ax (t ) A(b0 b1t b2t bk t )
2ቤተ መጻሕፍቲ ባይዱ
比较上式两边t的同次幂可得
现代控制理论总结
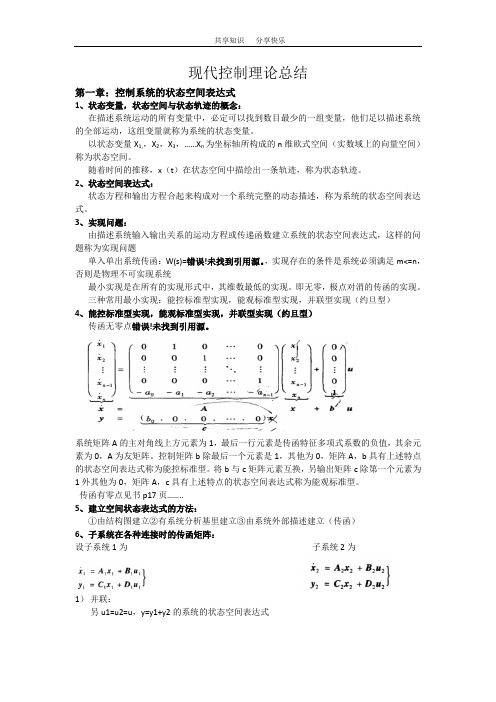
现代控制理论总结第一章:控制系统的状态空间表达式1、状态变量,状态空间与状态轨迹的概念:在描述系统运动的所有变量中,必定可以找到数目最少的一组变量,他们足以描述系统的全部运动,这组变量就称为系统的状态变量。
以状态变量X1,,X2,X3,……X n为坐标轴所构成的n维欧式空间(实数域上的向量空间)称为状态空间。
随着时间的推移,x(t)在状态空间中描绘出一条轨迹,称为状态轨迹。
2、状态空间表达式:状态方程和输出方程合起来构成对一个系统完整的动态描述,称为系统的状态空间表达式。
3、实现问题:由描述系统输入输出关系的运动方程或传递函数建立系统的状态空间表达式,这样的问题称为实现问题单入单出系统传函:W(s)=错误!未找到引用源。
,实现存在的条件是系统必须满足m<=n,否则是物理不可实现系统最小实现是在所有的实现形式中,其维数最低的实现。
即无零,极点对消的传函的实现。
三种常用最小实现:能控标准型实现,能观标准型实现,并联型实现(约旦型)4、能控标准型实现,能观标准型实现,并联型实现(约旦型)传函无零点错误!未找到引用源。
系统矩阵A的主对角线上方元素为1,最后一行元素是传函特征多项式系数的负值,其余元素为0,A为友矩阵。
控制矩阵b除最后一个元素是1,其他为0,矩阵A,b具有上述特点的状态空间表达式称为能控标准型。
将b与c矩阵元素互换,另输出矩阵c除第一个元素为1外其他为0,矩阵A,c具有上述特点的状态空间表达式称为能观标准型。
传函有零点见书p17页……..5、建立空间状态表达式的方法:①由结构图建立②有系统分析基里建立③由系统外部描述建立(传函)6、子系统在各种连接时的传函矩阵:设子系统1为子系统2为1)并联:另u1=u2=u,y=y1+y2的系统的状态空间表达式所以系统的传递函数矩阵为:2)串联:由u1=u,u2=y1,y=y2得系统的状态空间表达式为:W(S)=W2(S)W1(S)注意不能写反,应为矩阵乘法不满足交换律3)反馈:系统状态空间表达式:第二章:状态空间表达式的解:1、状态方程解的结构特征:线性系统的一个基本属性是满足叠加原理,把系统同时在初始状态错误!未找到引用源。
现代控制理论基础第二章习题答案
第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110A (4) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:(1) (2) (3) (4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:(1) (2)特征方程为: 特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==110010001321P P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。
状态空间表达式的解
第2章 状态空间表达式的解第1节 线性定常齐次状态方程的解线性定常齐次状态方程0(0)x Ax x x ==& 的解为0()Atx t e x = (0)t >式中,22()2!!kAt k t At e I At A k ∞∆==+++=∑L 证明:用拉普拉斯变换法。
对 x A x =& 作拉氏变换,得0()()sX s x AX s -=10()()X s sI A x -=-110()[()]x t L sI A x --=-因为 223111()()sI A I A A I s s s -+++=L故 1223111()sI A I A A s s s --=+++L12023111()[]x t L I A A x s s s -=+++L 2201()2!I At A t x =+++L 0Ate x =顺便可知])[(11---=A sI L eAt第2节 矩阵指数函数Ate1、Ate 的定义和性质(1)定义22()2!!kAtk t At e I At A k ∞==+++=∑L 式中 A —线性定常系统系统矩阵,n n ⨯阶;Ate —矩阵指数函数,n n ⨯阶时变矩阵。
若A 中各元素均小于某定值,Ate 必收敛;若A 为实矩阵,Ate 绝对收敛。
(2)基本性质:◆组合性质:)(2121t t A At At ee e += 其中21,t t 为相衔接的两时间段。
推论1:I eeee A t t A t A At ===--0)()(推论2:)(1][t A At ee --=◆微分性质:A e Ae e tAt At At ==d d ◆当A 、B 两阵可交换,即 BA AB =,则tB A BtAt ee e )(+=◆若1-P 存在,则P e P eAAPP 11-=-2、Ate 的计算 (1)级数计算法()!kAtk At e k ∞==∑ (2)拉氏变换法])[(11---=A sI L eAt当A 阵维数较高时,预解矩阵可采用递推法计算。
状态空间表达式的解及可控可观性

et
2e
2
t
9
2)利用对角形变换法计算
0 1 A 2 3
det(I - A) 0,求得两个互异的特征值 1 -1, 2 -2
由(iI-A)pi 0(i 1, 2)
解得p 1
1
1
,
p2
1
2
取
1
P
① 定义式计算
eAt I At 1 A2t 2 1 Akt k
2!
k 0 k!
② 拉氏变换(复域)法(实用)
( t ) L 1 sI A 1
6
③ 对角标准形法
定理:线性定常系统,若矩阵 A 的特征值互不相同,
则必存在一非奇异矩阵P,通过线性变换,使A阵化为
13
反变换可用卷积积分求得:
t
则 x(t) e At x( 0 ) e A(t τ)Bu( )d
0
t
( t )x0 ( t )Bu( )d
若初值 x( t0 ) x0 ,
0
y(t )
C
e
At
x(0)
t
e A(t )Bu( )d
(
s
1
)(
s
2
)
-2
( s 1 )( s 2 )
1
( s 1 )( s 2 )
s
( s 1 )( s 2 )
e At L1
sI A 1
2et e2t 2e t 2e 2t
现代控制理论第二章

第二章 控制系统状态空间表达式的解建立了控制系统状态空间表达式之后,就是讨论求解的问题,本章重点讨论状态转移矩阵的定义,性质和计算方法,从而导出状态方程的求解公式并讨论连续时间系统状态方程的离散化的问题。
§2-1线性定常齐次状态方程的解(自由解)所谓自由解是指系统输入为零时,由初始状态引起的自由运动。
状态方程为齐次矩阵微分方程:AX X= (2-1)若初始时刻0t 时的状态给定为00)(x t x =,则式(2-1)有唯一确定解。
0)(0)(x e t x t t A -=,0t t ≥(2-2)若初始时刻从0=t 开始,即0)0(x x =,则其解为:0)(x e t x At =, 0t t ≥(2-3)证:先假设式(2-1)的解)(t x 为t 的矢量幂级数形式,即:+++++=k k t b t b t b b t x 2210)((2-4)对上式求导: ++++=-1232132)(k k t kb t b t b b t x代人式(2-1)得:A x= ( +++++kk t b t b t b b 2210) (2-5)既然式(2-4)是(2-1)的解,则式(2-5)对任意时刻t 都成立,故t 的同次幂项的系数应相等,有:01Ab b =,0212!2121b A Ab b ==,0323!3131b A Ab b ==,… 01!11b A k Ab kb k k k ==-,… 在式(2-4)中,令0=t ,可得:00)0(x x b == 将以上结果代人式(2-4),故得:022)!1!211()(x t A k t A At t x k k +++++= (2-6)括号内的展开式是n n ⨯矩阵,它是一个矩阵指数函数,记为At e221112!!At k ke At A t A t K =+++++ (2-7)式(2-6)可表示为:0()At x t e x =再用)(0t t -代替)0(-t ,即在代替t 的情况下,同样证明0)(0)(x e t x t t A -=的正确性。
现代控制理论总结

现代控制理论总结第一章:控制系统的状态空间表达式1、状态变量,状态空间与状态轨迹的概念:在描述系统运动的所有变量中,必定可以找到数目最少的一组变量,他们足以描述系统的全部运动,这组变量就称为系统的状态变量。
以状态变量X1,,X2,X3,……X n为坐标轴所构成的n维欧式空间(实数域上的向量空间)称为状态空间。
随着时间的推移,x(t)在状态空间中描绘出一条轨迹,称为状态轨迹。
2、状态空间表达式:状态方程和输出方程合起来构成对一个系统完整的动态描述,称为系统的状态空间表达式。
3、实现问题:由描述系统输入输出关系的运动方程或传递函数建立系统的状态空间表达式,这样的问题称为实现问题单入单出系统传函:W(s)=,实现存在的条件是系统必须满足m<=n,否则是物理不可实现系统最小实现是在所有的实现形式中,其维数最低的实现。
即无零,极点对消的传函的实现。
三种常用最小实现:能控标准型实现,能观标准型实现,并联型实现(约旦型)4、能控标准型实现,能观标准型实现,并联型实现(约旦型)传函无零点系统矩阵A的主对角线上方元素为1,最后一行元素是传函特征多项式系数的负值,其余元素为0,A为友矩阵。
控制矩阵b除最后一个元素是1,其他为0,矩阵A,b具有上述特点的状态空间表达式称为能控标准型。
将b与c矩阵元素互换,另输出矩阵c除第一个元素为1外其他为0,矩阵A,c具有上述特点的状态空间表达式称为能观标准型。
传函有零点见书p17页……..5、建立空间状态表达式的方法:①由结构图建立②有系统分析基里建立③由系统外部描述建立(传函)6、子系统在各种连接时的传函矩阵:设子系统1为子系统2为1)并联:另u1=u2=u,y=y1+y2的系统的状态空间表达式所以系统的传递函数矩阵为:2)串联:由u1=u,u2=y1,y=y2得系统的状态空间表达式为:W(S)=W2(S)W1(S)注意不能写反,应为矩阵乘法不满足交换律3)反馈:系统状态空间表达式:第二章:状态空间表达式的解:1、状态方程解的结构特征:线性系统的一个基本属性是满足叠加原理,把系统同时在初始状态和输入u作用下的状态运动x(t)分解为由初始状态和输入u分别单独作用所产生的运动和的叠加。
现代控制理论-状态方程的解

2 5
T 1 2 3 1 2
二重根
2
1 1
对于重根,要求广义特 征向量
i Pi APi
i Pi1 APi1 Pi
.......... .......... .......... ....
参见 现代控制论
教材p.490 刘豹 p.28
Matla 中,矩阵求逆 b 命令为
1 1 0
dt
e At Bu(t )
将上式积分有
X (t) 1 (sI A)1 X (0) 显然 e At 1 (sI A)1
t d eA X ( )
t
d e A Bu( )d
0 d
0
t
e At的一种求法
2021/4/22
可得 e At X (t ) X (0) e A Bu( )d
T 1 AT,有eAt TetT 1
( 2 )A特征根有重根 ,算法和( 1 )相似
参见 教材 P.490 机机械械工工业业出出版版社社 天天津津大大学学 刘刘豹豹 pp..2288
[3]利用拉氏反变换求 e At
( t ) eAt 1 [( sI A)1 ]
[ 4 ]; 应用凯莱 哈密顿定理求e At 参见p.472
方阵A满足自身的特征方程
作业:p.536;9-12,9-2
f ( A ) An an1 An1 a1 A a0 I 0
2021/4/22
8
电气工程学院
1.什么是传统机械按键
设传计统?的机械按键设计是需要手动按压按键
触动PCBA上的开关按键来实现功能的一种
设传计统方机式械。按键结
构层图:
0
3
电气工程学院
t
现代控制理论课后习题及答案
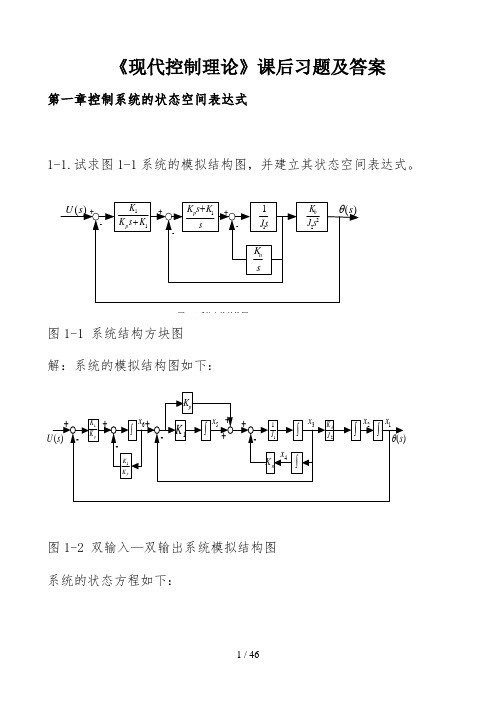
《现代控制理论》课后习题及答案第一章控制系统的状态空间表达式1-1.试求图1-1系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图图1-1 系统结构方块图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图图1-2 双输入—双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2.有电路如图1-3所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图图1-3 电路图解:由图,令32211,,x u x i x i c===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
状态空间表达式的解PPT课件

06 结论
状态空间表达式解法的总结
解法概述
详细总结了状态空间表达式的解法,包 括其基本原理、主要步骤和常用技巧。
优缺点分析
对状态空间表达式的解法进行了全面 的优缺点分析,以便读者更好地理解
和使用。
应用实例
列举了几个实际应用的状态空间表达 式问题,并展示了如何运用解法进行 求解。
与其他方法的比较
将状态空间表达式的解法与其他常见 的方法进行了比较,突出了其独特性 和优势。
状态空间表达式的重要性
01
状态空间表达式具有直观性和通 用性,能够全面地描述系统的动 态特性,包括系统的稳定性、可 控性和可观测性等。
02
它为控制系统分析和设计提供了 强大的数学工具,使得复杂系统 的分析和控制成为可能。
状态空间表达式的应用领域
控制系统设计
状态空间表达式广泛应用于控制系统 设计和分析中,如线性控制系统、非 线性控制系统、多变量控制系统等。
等。
判定方法
03
通过计算系统的极点、零点和增益等参数,判断解的稳定性。
解的唯一性
定义
如果给定相同的初始条件和输入信号,状态空 间表达式的解是唯一的,则称该解是唯一的。
判定方法
通过求解线性代数方程组或使用数值计算方法, 验证解的唯一性。
唯一性条件
只有在无病态或适定性条件下,解才是唯一的。
解的收敛性
稳定性分析
分析系统的稳定性,判断系统是否能够保持稳定运行。对于不稳定 的系统,需要采取措施进行控制和调整。
04 状态空间表达式的解的性 质
解的稳定性
定义
01
如果状态空间表达式的解在初始条件的影响下,最终会趋于稳
定状态,则称该解是稳定的。
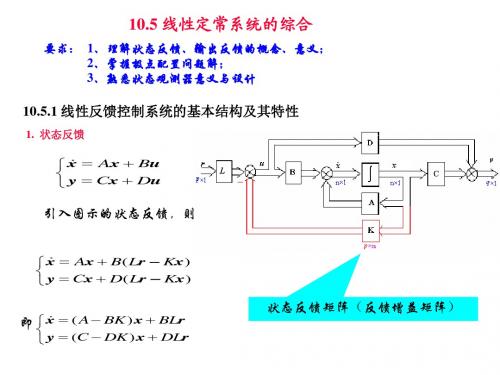
第二章控制系统状态空间表达式的解要求1、掌握状态空间表达式的
③ 比较 f ( )、f (* ) ④ 解得K 例 已知
G(s)
得n个方程
10 ,试设计状态试系统的闭环极点为-2,-1±j。 s( s 1)( s 2)
0 0 x 0 y 10 1 0 0 0 u 0 1 x 2 3 1 0 0 x
带输出反馈的传递函数阵(L=I,D=0)
GH ( s ) C[ sI ( A BHC )]1 LB [ I G0 ( s ) H ]1 G0 ( s ) G0 ( s )[ I HG0 ( s )]1
受控系统传递函数阵(D=0)
G0 (s) C (sI A)1 B
1. SISO系统极点配置
定理
对Σ0(A,B,C)任意配置极点 Σ0完全能控。
给定极点确定状态反馈增益K的步骤: ① 加入 K [ K0
K1 Kn1 ]
② 求 f () I ( A BK )
* * f * ( ) ( 1* )( 2 )( n )
故受控系统可以任意配置极点以及观测器的特征值。 令 G ( g1 g2 g3 )T ,则
1 ( ) I ( A GC) I f 3 0 0 g1 g 2 [0 1 1 2 0 g 3 0
K [k1 k2 k3 ]
20 G 25 12
令
,则
1 0 0 1 f ( ) I ( A BK ) I 3 1 1 0 [ k1 k2 k3 ] 0 2 0 0 k1 1 k2 k3 3 1 1 3 k1 2 (k1 3k2 3) 2k1 6k3 2
状态空间表达式的解

第2章状态空间表达式的解第1节线性定常齐次状态方程的解线性定常齐次状态方程i= Ax x(0) = X o的解为x(t) = e At X o (t 0 )式中,e At T At A2-2! k=o k!证明:用拉普拉斯变换法。
对x= Ax作拉氏变换,得sX(s) - X o= AX(s)-iX(s) = (si - A) X ox(t) =「[(si「A)1]x o111因为(si A)(T 丐A 飞A2 lilt Is s s故(si「A) 1 = -1 2 A + A2IIIs s sx(t)= L1[-r 2 A ^A2lll]x°s s s=(I At f A2t2lll)x o= e At x)顺便可知e At = L 1[(sl - A) 1]第2节矩阵指数函数e At1、e At的定义和性质(1)定义e At= I + At + A2「+ 11 卜z(At)-2! k=o k!式中A—线性定常系统系统矩阵,n n阶;e At—矩阵指数函数,n n阶时变矩阵。
若A中各元素均小于某定值,e At必收敛;若A为实矩阵,e At绝对收敛。
(2)基本性质:♦组合性质:e Atl e At^ e A(t/12}其中为相衔接的两时间段。
推论2: [e At]T 二e A Ct)■微分性质:%Ae At e At Adt♦当A、B两阵可交换,即BA,则e At e Bt (A B)t♦若pF存在,贝卩eg P1e A P2、e‘At的计算(1)级数计算法、lAtl!Ate(2)拉氏变换法当A 阵维数较高时, (3)多项式表示法e At = L 1[(sl A)1]预解矩阵可采用递推法计算。
e At若A 的特征根1,o (t)1(t)n-1k' k(t)A k=0•, n 两两互异,则III J in r1 I12212 2e l te 2t(4)非奇异变换法 1)设A 的特征根1,・,n 两两互异,贝卩t1e nt]P 1At■ t ■ te A - Pdiag[e lte 2t其中 P 满足 P^APu diag 「「2 n ]推论:若A= diagV 「2…5】,则证明:可交换,故 」e At 二 diag[e lt e 2t扎11 e nt]2)设A 为具有共轭复特征根zi,2CJ-j 的二阶阵,贝U其中P 满足eAtCT P 1AP-tP cos t sin t 胡 I P sin t cos t(模态规范型)。
现代控制理论试题与答案
现代控制理论1.经典-现代控制区别:经典控制理论中,对一个线性定常系统,可用常微分方程或传递函数加以描述,可将某个单变量作为输出,直接和输入联系起来;现代控制理论用状态空间法分析系统,系统的动态特性用状态变量构成的一阶微分方程组描述,不再局限于输入量,输出量,误差量,为提高系统性能提供了有力的工具.可以应用于非线性,时变系统,多输入-多输出系统以及随机过程.2.实现-描述由描述系统输入-输出动态关系的运动方程式或传递函数,建立系统的状态空间表达式,这样问题叫实现问题.实现是非唯一的.3.对偶原理系统=∑1(A1,B1,C1)和=∑2(A2,B2,C2)是互为对偶的两个系统,则∑1的能控性等价于∑2的能观性, ∑1的能观性等价于∑2的能控性.或者说,若∑1是状态完全能控的(完全能观的),则∑2是状态完全能观的(完全能控的).对偶系统的传递函数矩阵互为转置4.对线性定常系统∑0=(A,B,C),状态观测器存在的充要条件是的不能观子系统为渐近稳定第一章控制系统的状态空间表达式1.状态方程:由系统状态变量构成的一阶微分方程组2.输出方程:在指定系统输出的情况下,该输出与状态变量间的函数关系式3.状态空间表达式:状态方程和输出方程总合,构成对一个系统完整动态描述4.友矩阵:主对角线上方元素均为1:最后一行元素可取任意值;其余元素均为05.非奇异变换:x=Tz,z=T-1x;z=T-1ATz+T-1Bu,y=CTz+Du.T为任意非奇异阵(变换矩阵),空间表达式非唯一6.同一系统,经非奇异变换后,特征值不变;特征多项式的系数为系统的不变量第二章控制系统状态空间表达式的解1.状态转移矩阵:eAt,记作Φ(t)2.线性定常非齐次方程的解:x(t)=Φ(t)x(0)+∫t0Φ(t-τ)Bu(τ)dτ第三章线性控制系统的能控能观性1.能控:使系统由某一初始状态x(t0),转移到指定的任一终端状态x(tf),称此状态是能控的.若系统的所有状态都是能控的,称系统是状态完全能控2.系统的能控性,取决于状态方程中系统矩阵A和控制矩阵b3.一般系统能控性充要条件:(1)在T-1B中对应于相同特征值的部分,它与每个约旦块最后一行相对应的一行元素没有全为0.(2)T-1B中对于互异特征值部分,它的各行元素没有全为0的4.在系统矩阵为约旦标准型的情况下,系统能观的充要条件是C中对应每个约旦块开头的一列的元素不全为05.约旦标准型对于状态转移矩阵的计算,可控可观性分析方便;状态反馈则化为能控标准型;状态观测器则化为能观标准型6.最小实现问题:根据给定传递函数阵求对应的状态空间表达式,其解无穷多,但其中维数最小的那个状态空间表达式是最常用的.第五章线性定常系统综合1.状态反馈:将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入.K为r*n维状态反馈系数阵或状态反馈增益阵2.输出反馈:采用输出矢量y构成线性反馈律H为输出反馈增益阵3.从输出到状态矢量导数x的反馈:A+GC4.线性反馈:不增加新状态变量,系统开环与闭环同维,反馈增益阵都是常矩阵动态补偿器:引入一个动态子系统来改善系统性能5.(1)状态反馈不改变受控系统的能控性(2)输出反馈不改变受控系统的能控性和能观性6.极点配置问题:通过选择反馈增益阵,将闭环系统的极点恰好配置在根平面上所期望的位置,以获得所希望的动态性能(1)采用状态反馈对系统任意配置极点的充要条件是∑0完全能控(2)对完全能控的单输入-单输出系统,通过带动态补偿器的输出反馈实现极点任意配置的充要条件[1]∑0完全能控[2]动态补偿器的阶数为n-1(3)对系统用从输出到x 线性反馈实现闭环极点任意配置充要条件是完全能观7.传递函数没有零极点对消现象,能控能观8.对完全能控的单输入-单输出系统,不能采用输出线性反馈来实现闭环系统极点的任意配置9.系统镇定:保证稳定是控制系统正常工作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定(1)对系统采用状态反馈能镇定的充要条件是其不能控子系统渐近稳定(2)对系统通过输出反馈能镇定的充要条件是其结构分解中的能控且能观子系统是输出反馈能镇定的,其余子系统是渐近稳定的(3)对系统采用输出到x 反馈实现镇定充要条件是其不能观子系统为渐近稳定10.解耦问题:寻求适当的控制规律,使输入输出相互关联的多变量系统的实现每个输出仅受相应的一个输入所控制,每个输入也仅能控制相应的一个输出11.系统解耦方法:前馈补偿器解耦和状态反馈解耦12.全维观测器:维数和受控系统维数相同的观测器现代控制理论试题1 ①已知系统u u uy y 222++=+ ,试求其状态空间最小实现。
第二章控制系统状态空间表达式的解
a(b0 b1t b2t 2 bkt k )
(1) (2) (3)
2.1 线性定常齐次状态方程的解(自由解)
等式两边t 的同次幂的系数相等,因此有
b1 ab0
b2 bk
1 2
1 k
ab1
abk
1 2!
a
2b0
1 k!
a
(5)
将(5)式代入(1)式
2.1 线性定常齐次状态方程的解(自由解)
b1 2b2t 3b3t 2 kbkt k 1
A(b0 b1t b2t 2 bkt k )
等式两边t 同次幂的系数相等,因此有
b1 Ab0
b2 bk
1 2
1 k
Ab1
Abk
1 2!
A2b0
1 k!
2.1 线性定常齐次状态方程的解(自由解)
1、线性定常系统的运动
1)、自由运动:线性定常系统在没有控制作用,即u=0时, 由初始状态引起的运动称自由运动。
u0
x
( A, B)
齐次状态方程的解: x Ax , x(t) |t0 x(0)
2)、强迫运动:线性定常系统在控制u作用下的运动,称
为强迫运动。
e1t
0
e At Te AtT1 T
T 1
0
ent
其中: T为使A化为对角线标准型的非奇异变换矩阵。
求状态转移矩阵的步骤:
1)先求得A阵的特征值 。i
2)求对应于 的i 特征向量 ,p并i 得到T阵及T的逆阵。
3)代入上式即可得到状态转移矩阵的值。
即:A det(I A) 0 i (i I A)pi 0 pi T
0 0 0 0 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章 状态空间表达式的解第1节 线性定常齐次状态方程的解线性定常齐次状态方程0(0)x Ax x x ==&的解为0()Atx t e x = (0)t >式中,22()2!!kAt k t At e I At A k ∞∆==+++=∑L 证明:用拉普拉斯变换法。
对 x A x =& 作拉氏变换,得0()()sX s x AX s -=10()()X s sI A x -=-110()[()]x t L sI A x --=-因为 223111()()sI A I A A I s s s -+++=L故 1223111()sI A I A A s s s --=+++L12023111()[]x t L I A A x s s s-=+++L 2201()2!I At A t x =+++L 0Ate x =顺便可知])[(11---=A sI L eAt第2节 矩阵指数函数Ate1、Ate 的定义和性质 (1)定义22()2!!kAtk t At e I At A k ∞==+++=∑L 式中 A —线性定常系统系统矩阵,n n ⨯阶;Ate —矩阵指数函数,n n ⨯阶时变矩阵。
若A 中各元素均小于某定值,Ate 必收敛;若A 为实矩阵,Ate 绝对收敛。
(2)基本性质:◆组合性质:)(2121t t A At At ee e +=其中21,t t 为相衔接的两时间段。
推论1:I eeee A t t A t A At ===--0)()(推论2:)(1][t A At ee --=◆微分性质:A e Ae e tAt At At ==d d ◆当A 、B 两阵可交换,即 BA AB =,则tB A BtAt ee e )(+=◆若1-P 存在,则P e P eAAPP 11-=-2、Ate 的计算 (1)级数计算法()!kAtk At e k ∞==∑ (2)拉氏变换法])[(11---=A sI L eAt当A 阵维数较高时,预解矩阵可采用递推法计算。
(3)多项式表示法∑-==10)(n k k k AtA t eα 若A 的特征根1λ,2λ,…, n λ两两互异,则122101112112122211()1()1()1n n tn t n t n n n n t e t e t e -----⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦L L M M M M M M M L λλλαλλλαλλλαλλλ (4)非奇异变换法1)设A 的特征根1λ,2λ,…, n λ两两互异,则1]diag[21-=P e eeP etttAtn λλλΛ其中P 满足 ]diag[211n AP P λλλΛ=-推论:若]diag[21n A λλλΛ=,则]diag[21tttAtn e eeeλλλΛ=2)设A 为具有共轭复特征根ωσλj 2,1±=的二阶阵,则1cos sin sin cos Attt t e e P P t t σωωωω-⎡⎤=⎢⎥-⎣⎦ 其中P 满足 ⎥⎦⎤⎢⎣⎡-=-σωωσAP P 1(模态规范型)。
证明:因 ⎥⎦⎤⎢⎣⎡σσ与⎥⎦⎤⎢⎣⎡-ωω可交换,故t t t tee e e ⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-==ωωσσωωσσσωωσ)(t te I eωωσ⎡⎤⎢⎥-⎣⎦=⨯而2435()()()()12!4!3!5!3524()()()()13!5!2!4!cos sin sin cos t t t t t t t t t t t t t e t t ωωωωωωωωωωωωωωωω⎡⎤⎢⎥-++-+--⎣⎦-+-+-++⎡⎤⎡⎤⎢⎥==⎢⎥-⎢⎥⎣⎦⎣⎦LLK LL故cos sin sin cos t tt t e e t t σωωσσωωωω⎡⎤⎢⎥-⎣⎦⎡⎤=⎢⎥-⎣⎦再由1-⎥⎦⎤⎢⎣⎡-=P P A σωωσ 即得所证。
第3节 状态空间表达式的解1、线性定常系统状态空间表达式的解设线性定常系统x Ax Bu =+&,00()x t x =可以证明,状态方程的解为00()()0'"()()()))d ((tA t t A t t x t ex t ex Bu t t x τττ--=+=+⎰其中 0()0')()(A t t x t ex t -=——自由响应,只与)(0t x 和A 有关。
()"()d )(tA t t eB x u t τττ-=⎰——强迫响应,与)(t u 和A, B 有关。
系统的输出00()()0()()()()d tA t t A t t y t C x t Cex t CeBu τττ--==+⎰2、阶跃输入下状态方程的的解设00=t ,)(1)(t k t u =,k 为与)(t u 同维的常数向量,则k B I eA x e t x AtAt][)0()(1-+=-3、状态转移矩阵0()A t t e-又称作状态转移矩阵,常记为0()0()A t t t t e-Φ-=。
使用该符号,线性定常系统状态方程的解可表为00()()()()()d tt x t t t x t t Bu τττ=Φ-+Φ-⎰若00t =,则()Att e Φ=,且()()(0)()()d tx t t x t Bu τττ=Φ+Φ-⎰采用符号0()t t Φ-,主要是便于时变系统状态转移矩阵的表述。
第5节 线性时变连续系统运动分析线性时变连续系统()()x A t x B t u =+&,00()x t x =,0[,]f t t t ∈设在域0[,]f t t 内,()A t 和()B t 的元素是t 的分段连续函数,以保证上述状态方程解的存在性和唯一性。
1、线性时变连续系统状态方程的解回顾:线性定常连续系统状态方程解000()()()()()d tt x t t t x t t Bu τττ=Φ-+Φ-⎰式中,0()0()A t t t t e-Φ-=——状态转移矩阵。
其满足如下两式比照定常系统,可写出线性时变连续系统状态方程的解为00()(,)()(,)()()d tt x t t t x t t B u ττττ=Φ+Φ⎰式中,0(,)t t Φ——线性时变连续系统的状态转移矩阵,具有性质:00(,)()(,)t t A t t t t∂Φ=Φ∂ 00(,)t t I Φ=211020(,)(,)(,)t t t t t t ΦΦ=Φ 100(,)(,)t t t t -Φ=Φ2、0(,)t t Φ的计算时变系统的状态转移矩阵0(,)t t Φ与定常系统的0()t t Φ-在形式上和某些性质上类似,但二者有本质的区别。
主要区别是:◆0()t t Φ-只是时间差0t t -的函数,与0t 无关,而0(,)t t Φ是t 和0t 的二元函数;◆0()t t Φ-一般可写出闭合表达式,而除极简单的情况外,0(,)t t Φ往往难以得到其闭合表达式。
0(,)t t Φ可采用级数近似法计算,即0000110(,)()d ()()d d ttt t t t t I A A A τττττττΦ=++⎰⎰⎰01012210()()()d d d tt t t A A A ττττττττ++⎰⎰⎰L注意:对定常系统有00d ()0()tt A A t t t t eeτ-⎰Φ-==而对时变系统,一般0()d 0(,)tt A t t eττ⎰Φ≠。
可以证明,当且仅当()A t 与0()d tt A ττ⎰满足关系式()()d ()d ()ttt t A t A A A t ττττ=⎰⎰或122112()()()()(,)A t A t A t A t t t =∀成立时,才有0()d 0(,)tt A t t eττ⎰Φ=时变系统求解一般采用数值方法。
【例】求如下时变系统状态方程的解21001(1),(0),()1()(0)1100t x x u x u t t t t ⎡⎤⎡⎤⎡⎤⎢⎥+=+==>⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎢⎥⎣⎦& 解:因2212121100(1)(1)()()00000t t A t A t ⎡⎤⎡⎤⎢⎥⎢⎥++==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦2221211100(1)(1)()()00000t t A t A t ⎡⎤⎡⎤⎢⎥⎢⎥++==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦即有等式122112()()()()(,)A t A t A t A t t t =∀成立,故状态转移矩阵002()d 01(,)()d ()d 2!tt A ttt t t t eI A A ττττττ⎰⎡⎤Φ==+++⎢⎥⎣⎦⎰⎰L 0022211001(1)(1)d d 2!0000t t t t I ττττ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥++=+++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎰⎰L 000001(1)(1)(1)(1)000001t t t t t t t t I --⎡⎤⎡⎤⎢⎥⎢⎥++++=+++=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦L状态方程的解为0()(,0)(0)(,)()()d tx t t x t B u ττττ=Φ+Φ⎰111101t t ⎡⎤⎡⎤⎢⎥=++⎢⎥⎢⎥⎣⎦⎣⎦010(1)(1)1()d 101t t t τττττ-⎡⎤⎡⎤⎢⎥++⎢⎥⎢⎥+⎣⎦⎢⎥⎣⎦⎰111t t ⎡⎤+⎢⎥=++⎢⎥⎣⎦0d 11t t t τττ-⎡⎤⎢⎥+⎢⎥+⎣⎦⎰22422(1)222t t t t t ⎡⎤++⎢⎥+⎢⎥=⎢⎥++⎢⎥⎣⎦第6节 状态方程的数值解法1、状态方程的数值解法的概念不是所有的状态方程都存在解析解,数值解更具有普遍性。
状态方程的数值求解实际上就是一阶微分方程组初值问题的数值求解。
状态方程的数值积分解法如: 改进欧拉法; 龙格-库塔法; 基尔法; 特雷纳法等。
后两种方法可用于刚性微分方程组(0)Re(<i λ,)Re(min )Re(max i i λλ>>,),,2,1(n i Λ=,λ为A 阵特征根)求解。
数值积分解法分类: 单步/多步; 显式/隐式; 定步长/变步长。
计算误差:截断误差(算法)+舍入误差(字长)→积累误差(算法,字长,计算时间)同一问题,采用不同的数值解法或步长,求解效率甚至数值解结果可能有较大差异,甚至出现数值不稳定问题。
2、四阶龙格-库塔(Runge-Kutta ,RK )法属于定步长显式单步(自启动)解法。
对状态方程()[(),()]xt f x t u t =&,00)(x t x = 设h t t k k +=+1(),2,1,0Λ=k ,h 为计算步长。