ATMage16的16位定时器的PWM应用
ATmega16单片机定时器讲解资料
位6: TOIE2:T/C2溢出中断使能位。 0:溢出中断禁止; 1:溢出中断使能。
位5: TICIE1:T/C1输入捕捉中断使能位。 0:输入捕捉中断禁止; 1:输入捕捉中断使能。
Page 16
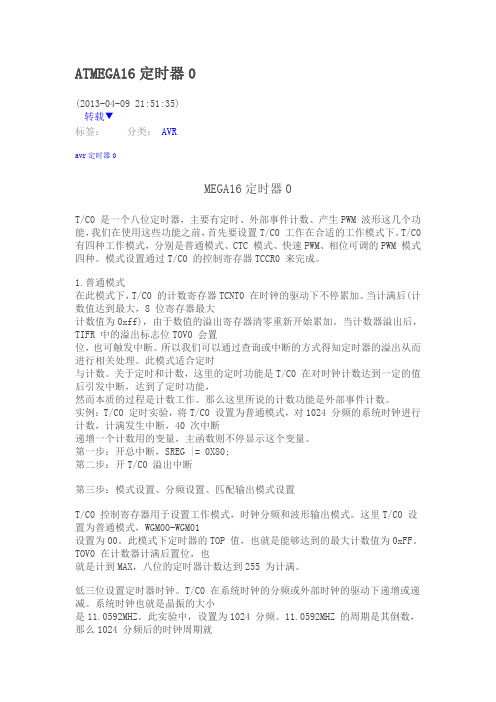
R1 10K
4 /RE T
C0 4.7u
ATm eg a1 6
AJ1
C7 33 OSC1 C6 33
12 PD .3(/INT1)
8 XTAL1
7 XTAL2
L1 R21~28
L2 R29~36
L3 R37~44
L4 R45~52
dp g f e d c b a
dp g f e d c b a
dp g f e d c b a
Page 2
3.1、单片机定时器的基本应用、原理及要素
1、单片机定时器的基本应用 2、单片机定时器的基本原理图 3、单片机定时器的基本要素
Page 3
3.1.1、单片机定时器的基本应用
基本应用:
定时计数器是单片机中最基本的接口之一, 它的用途非常广泛,常用于计数、延时、测量 周期、频率、脉宽、提供定时脉冲信号等。在 实际应用中,对于转速,位移、速度、流量等 物理量的测量,通常也是由传感器转换成脉冲 电信号,通过使用定时计数器来测量其周期或 频率,再经过计算处理获得
Page 11
3.2.1、ATmega16单片机定时器T/C0的组成原理
TC0的比较匹配单元:
Page 12
在引脚的方向寄存器DDRB.3定 义为输出时,当寄存器TCCR0中 的标志位COM0[1:0]中任何一位为 1时,或门M1输出为1,多路数据 选择器S3的通道1被选中,如果端 口PB.3定义为输出时,三态门F2 被打开,OC0将替代引脚PB3原来 的I/O功能,端口PB.3上输出的就 是波形发生器产生的波形。当 COM0[1:0]都为0时,选择器S3的通 道0被选中,PB.3口输出的则是端 口PORT之值。
ATMEGA16定时器的使用

ATMEGA16定时器的使用[日期:2012-01-07 ] [来源:本站编辑作者:佚名] [字体:大中小] (投递新闻)/*本程序简单的示范了如何使用ATMEGA16的定时器AVR定时器的要点介绍T0工作于CTC模式,输出1KHz/2KHz 50%占空比的方波T1工作于快速PWM模式兼输入捕捉T2工作于相位修正PWM模式,输出490Hz的8bit PWM波出于简化程序考虑,各种数据没有对外输出,学习时建议使用JTAG ICE硬件仿真器对于定时器,AVRstudio的软件仿真是不准确的。
*/#include <AVR/io.h>#include <AVR/signal.h>#include <AVR/interrupt.h>//时钟定为8MHz,F_CPU=8000000//管脚定义#define ICPKEY 6 //ICP1 PD6 按键模拟ICP输入#define PWM0 3 //OC0 PB3#define PWM1A 5 //OC1A PD5#define PWM1B 4 //OC1B PD4#define PWM2 7 //OC2 PD7//宏定义#define PWM1A_ON() PORTD|= (1<<PWM1A) //输出高电平,灯亮#define PWM1A_OFF() PORTD&=~(1<<PWM1A) //输出低电平,灯灭//全局变量volatile unsigned int ICP_Time; //记录ICP输入捕捉事件的发生时刻volatile unsigned char T2PWM; //设置T2的PWM值volatile unsigned char T0OCR; //设置T0的时间值//仿真时在watch窗口,监控这些变量。
void timer0_init(void) //CTC模式输出1KHz/2KHz方波{OCR0 = T0OCR; //设定TOP值//TOP=8000000/(2*64*1000)-1=61.5 选61 1.008KHz(0.992mS)//TOP=8000000/(2*64*2000)-1=30.25 选30 2.016KHz(0.496ms)TCCR0 = (1<<WGM01)|(0<<WGM00)|(0<<COM01)|(1<<COM00)|(0<<CS02)|(1<<CS01)|(1<<CS00);//64分频,CTC模式,OC0取反输出方波}void timer1_init(void){OCR1A = 39062; //设定TOP值.时间5S(0.2Hz)//TOP=8000000/(1024*0.2)=39062.5OCR1B = 15624; //设定OC1B的PWM值约2秒钟40%TCCR1A = (1<<COM1B1)|(0<<COM1B0)|(1<<WGM11)|(1<<WGM10);TCCR1B = (0<<ICES1)|(1<<WGM13)|(1<<WGM12)|(1<<CS12)|(0<<CS11)|(1<<CS10);//1024分频,WGM1=15 快速PWM模式,TOP=OCRnA,ICP下降沿触发,OC1B正向PWM输出,OC1A为普通IO}SIGNAL(SIG_INPUT_CAPTURE1) //输入捕捉中断{ICP_Time=ICR1; //读取ICP输入捕捉事件的发生时刻}SIGNAL(SIG_OUTPUT_COMPARE1A)//T1输出比较A匹配中断{//在WGM1=15 快速PWM模式下,TOP=39062等同于5S左右的定时中断T2PWM+=10;OCR2=T2PWM; //修改T2的PWM值if (T0OCR==61)T0OCR=30; //改成1KHzelseT0OCR=61; //改成2KHzOCR0=T0OCR; //修改T0的时间值}void timer2_init(void)//相位修正PWM模式{OCR2 = T2PWM; //设定PWM值(最大值固定为255,8bit)TCCR2 = (0<<WGM21)|(1<<WGM20)|(1<<COM21)|(0<<COM20)|(0<<CS22)|(1<<CS21)|(1<<CS20);//32分频,相位修正PWM模式,PWM频率为490Hz,OC2正向PWM输出//fPWM=fclk_IO/(2*N*TOP)=8000000/(2*32*255)=490Hz}int main(void){//上电默认DDRx=0x00,PORTx=0x00 输入,无上拉电阻PORTA =0xFF; //不用的管脚使能内部上拉电阻。
ATmage16单片机操作步骤

快速PWM模式:1、设置端口输出
2、设置PWM波形模式以及时钟选择(TCCR1A,TCCR1B)
3、设置PWM波形的频率(OCR1A)
4、设置PWM波形的占空比(OCR1B)
定时器:1、根据需要选择时钟源(寄存器TCCR1B)
AVR单片机操作步骤
外部中断:1、设置外部中断的触发方式(寄存器MCUCR)
2、使能外部中断(寄存器GICR)
3、设置中断管脚(是否需要上拉电阻)
4、打开全局中断(寄存器SREG)
5、选择中断号,写中断服务函数
5、在置EEMWE为1的4个时钟周期内向EEWE中写入1
USART使用步骤:1、初始化工作模式,帧结构等(UCSRC)
2、波特率设置(UBBRL,UBBRH)
3、中断的相关设置(UCSRB)
4、选择中断号,编写中断服务函数
注意:从ADCH和ADCL中读取到的数据是BCD码格式
EEPROM写写入EEAR
3、把EEPROM的数据写入EEDR
4、置EEMWE为1
2、根据定时器时间的时钟源确定定时器的初值(寄存器TCNT1H和TCNT1L)
3、设置中断使能位 TIMSK |= BIT(2); SREG |= BIT(7);
4、选择中断号,编写中断服务程序
注意:在中断服务函数里面需要重新设置定时器初值
ADC使用步骤: 1、ADC输入端在初始化
2、基准电压设置,数据对齐方式,通道选择(寄存器ADMUX)
3、AD使能,启动转换及中断设置(寄存器ADCSRA)
4、触发源选择(寄存器SFIOR)
5、选择中断号,编写中断服务函数,读取ADC转换结果(ADCH、ADCL)
(精)atmega16寄存器笔记整理

一、中断寄存器中断是指微处理器在程序执行期间响应外部的事务请求,暂停当前的处理器工作转而处理外部事件,外部事件处理完成之后返回原来工作暂停的地方继续执行程序。
Atmega16具有21个中断源,每个中断源都有独立的中断向量作为中断服务程序的入口地址,而且所有的中断源都有自己独立的使能位。
如果中断位I和中断向量使能位都置位,则中断发生,中断标志位置位,并执行中断服务程序。
中断向量表见表2,处于越低地址的中断具有更高优先级。
<一> 全局中断控制位1、状态寄存器SREG在I置位后,单独的中断使能由不同的中断寄存器控制。
若I为0,则禁止中断。
<二>外部中断?SE:MCU休眠使能位INT1:使能外部中断请求1INT0:使能外部中断请求0INT2:使能外部中断请求2INTF1:外部中断标志INT1引脚电平发生跳变时触发中断请求,并置位相应的中断标志INTF1。
如果SREG的位I以及GICR寄存器相应的中断使能位INT1为”1”,MCU即跳转到相应的中断向量。
进入中断服务程序之后该标志自动清零。
此外,标志位也可以通过写入”1” 来清零。
INTF0:外部中断标志INT0引脚电平发生跳变时触发中断请求,并置位相应的中断标志INTF0。
如果SREG的位I以及GICR寄存器相应的中断使能位INT0为”1”,MCU即跳转到相应的中断向量。
进入中断服务程序之后该标志自动清零。
此外,标志位也可以通过写入”1” 来清零。
INTF2:外部中断标志INT2引脚电平发生跳变时触发中断请求,并置位相应的中断标志INTF1。
如果SREG的位I以及GICR寄存器相应的中断使能位INT2为”1”,MCU即跳转到相应的中断向量。
进入中断服务程序之后该标志自动清零。
此外,标志位也可以通过写入”1” 来清零。
<三>定时器/计数器A VR的三个定时/计数器。
他们分别是T/C0、T/C1、T/C2,其中T/C0和T/C2是8位定时/计数器,T/C1是16位定时/计数器。
第四节 16bit PPG定时器
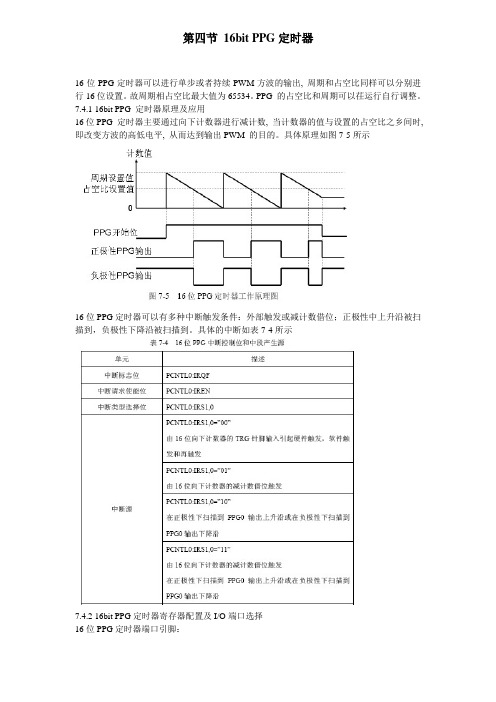
第四节16bit PPG定时器16位PPG定时器可以进行单步或者持续PWM方波的输出, 周期和占空比同样可以分别进行16位设置。
故周期相占空比最大值为65534。
PPG 的占空比和周期可以茌运行自行调整。
7.4.1 16bit PPG 定时器原理及应用16位PPG 定时器主要通过向下计数器进行减计数, 当计数器的值与设置的占空比之乡间时,即改变方波的高低电平, 从而达到输出PWM 的目的。
具体原理如图7-5所示16位PPG定时器可以有多种中断触发条件:外部触发或减计数借位;正极性中上升沿被扫描到,负极性下降沿被扫描到。
具体的中断如表7-4所示7.4.2 16bit PPG定时器寄存器配置及I/O端口选择16位PPG定时器端口引脚:16位PWM 定时器的对应寄存器: 16位PPG向下计数器寄存器(PDCRH0/PDCRL0), 16位PPG周期设置缓冲寄存器(PCSRH0/PCSRL0), 16位PPG占空比设置缓冲寄存器(PDUTH0/PDUTL0),16位PPG状态控制寄存器(PCNTH0/PCNTL0)。
16位PPG向下计数器寄存器(PDCRH0/PDCRL0):存储当前16位PPG向下计数器值。
16位PPG周期设置缓冲寄存器(PCSRH0/PCSRL0): 设置16位PPG向下计数器周期。
16位PPG占空比设置缓冲寄存器(PDUTH0/PDUTL0): 设置16位PPG向下计数器占空比值。
16位PPG状态控制寄存器PCNTH0包括了计数器使能位, 软件触发使能位, 软件触发标志位, 工作模式选择位, 工作始终选择位, 输出使能位。
16位PPG状态控制寄存器PCNTL0包括了输出取反位, PPG专用端口输出使能位, 终端模式选择位,中断标志位, 中语求使能位, 硬件触发使能位0/1。
7.4.3 16bit PPG定时器应用设计范例前面份绍过16位PPG 定时器可以茌运行中改变周期和占空比值并运行, 该节通过下面的样例详细说明其使用。
M16的16位定时器(相位修正PWM模式)程序集(精)
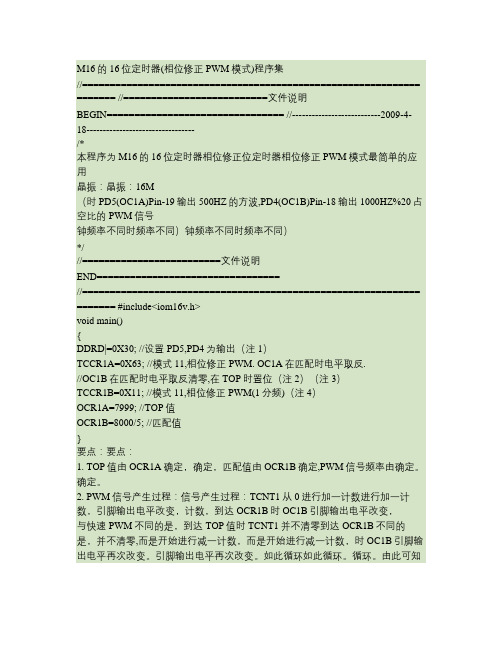
M16的16位定时器(相位修正PWM模式)程序集//============================================================= ======= //==========================文件说明BEGIN================================ //---------------------------2009-4-18---------------------------------/*本程序为M16的16位定时器相位修正位定时器相位修正PWM模式最简单的应用晶振:晶振:16M(时PD5(OC1A)Pin-19输出500HZ的方波,PD4(OC1B)Pin-18输出1000HZ%20占空比的PWM信号钟频率不同时频率不同)钟频率不同时频率不同)*///=========================文件说明END=================================//============================================================= ======= #include<iom16v.h>void main(){DDRD|=0X30; //设置PD5,PD4为输出(注1)TCCR1A=0X63; //模式11,相位修正PWM. OC1A在匹配时电平取反.//OC1B在匹配时电平取反清零,在TOP时置位(注2)(注3)TCCR1B=0X11; //模式11,相位修正PWM(1分频)(注4)OCR1A=7999; //TOP值OCR1B=8000/5; //匹配值}要点:要点:1. TOP值由OCR1A确定,确定,匹配值由OCR1B确定,PWM信号频率由确定。
确定。
2. PWM信号产生过程:信号产生过程:TCNT1从0进行加一计数进行加一计数,引脚输出电平改变,计数,到达OCR1B时OC1B引脚输出电平改变,与快速PWM不同的是,到达TOP值时TCNT1并不清零到达OCR1B不同的是,并不清零,而是开始进行减一计数,而是开始进行减一计数,时OC1B引脚输出电平再次改变。
16位定时器
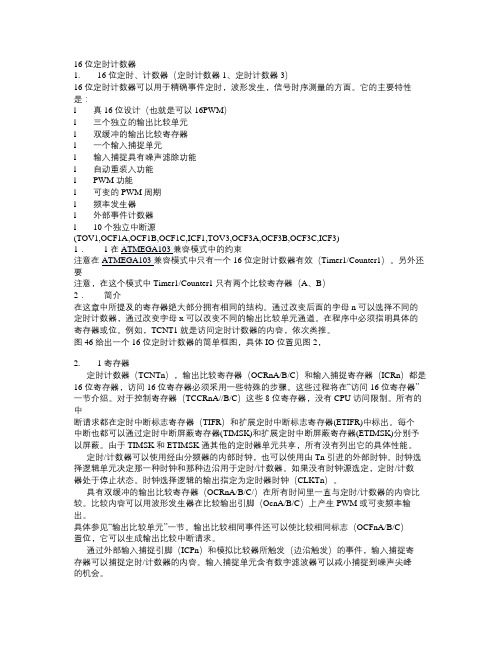
16位定时计数器1. 16位定时、计数器(定时计数器1、定时计数器3)16位定时计数器可以用于精确事件定时,波形发生,信号时序测量的方面。
它的主要特性是:l 真16位设计(也就是可以16PWM)l 三个独立的输出比较单元l 双缓冲的输出比较寄存器l 一个输入捕捉单元l 输入捕捉具有噪声滤除功能l 自动重装入功能l PWM功能l 可变的PWM周期l 频率发生器l 外部事件计数器l 10个独立中断源(TOV1,OCF1A,OCF1B,OCF1C,ICF1,TOV3,OCF3A,OCF3B,OCF3C,ICF3)1.1在ATMEGA103兼容模式中的约束注意在ATMEGA103兼容模式中只有一个16位定时计数器有效(Timer1/Counter1)。
另外还要注意,在这个模式中Timer1/Counter1只有两个比较寄存器(A、B)2.简介在这章中所提及的寄存器绝大部分拥有相同的结构。
通过改变后面的字母n可以选择不同的定时计数器,通过改变字母x可以改变不同的输出比较单元通道。
在程序中必须指明具体的寄存器或位。
例如,TCNT1就是访问定时计数器的内容,依次类推。
图46给出一个16位定时计数器的简单框图,具体IO位置见图2,2. 1寄存器定时计数器(TCNTn),输出比较寄存器(OCRnA/B/C)和输入捕捉寄存器(ICRn)都是16位寄存器,访问16位寄存器必须采用一些特殊的步骤。
这些过程将在“访问16位寄存器”一节介绍。
对于控制寄存器(TCCRnA//B/C)这些8位寄存器,没有CPU访问限制。
所有的中断请求都在定时中断标志寄存器(TIFR)和扩展定时中断标志寄存器(ETIFR)中标出。
每个中断也都可以通过定时中断屏蔽寄存器(TIMSK)和扩展定时中断屏蔽寄存器(ETIMSK)分别予以屏蔽。
由于TIMSK和ETIMSK通其他的定时器单元共享,所有没有列出它的具体性能。
定时/计数器可以使用经由分频器的内部时钟,也可以使用由Tn引进的外部时钟。
最全面的AVRmega16定时计数器的学习笔记

定时计数器学习笔记ATmega16一共配置了2个8位和1个16位,共3个定时计数器,它们是8位的定时计数器T/C0、T/C2和16位的定时计数器T/C1。
一、学习和使用定时计数器时,必须注意以下的基本要素:1、脉冲信号源。
脉冲信号源是指输入到定时计数器的计数脉冲信号。
通常用于定时计数器计数的脉冲信号可以由外部输入引脚提供,也可以由单片机内部提供。
2、计数器类型。
计数器类型是指计数器的计数运行方式,可分为加一(减一)计数器,单程计数或双向计数等。
3、计数器的上下限。
计数器的上下限指计数单元的最小值和最大值。
一般情况下,计数器的下限值为零,上限值为计数单元的最大计数值,即255(8位)或65535(16位)。
需要注意的是,当计数器工作在不同模式下时,计数器的上限值并不都是计数单元的最大计数值255或65535,它将取决于用户的配置和设定。
4、计数器的事件。
计数器的事件指计数器处于某种状态时的输出信号,该信号通常可以向MCU申请中断。
如当计数器计数到达计数上限值255时,产生“溢出”信号,向MCU申请中断。
二、8位定时计数器T/C0、T/C2(一)T/C0、T/C2的特点:(1)单通道计数器。
(2)比较匹配时清零计数器(自动重装特性,Auto Reload)。
(3)可产生无输出抖动(glitch-free)的,相位可调的脉宽调制(PWM)信号输出。
(4)频率发生器。
(5)外部事件计数器(仅T/C0)。
(6)带10位的时钟预分频器。
(7)溢出和比较匹配中断源(TOV0、OCF0和TOV2、OCF2)。
(8)允许使用外部引脚的32kHz手表晶振作为独立的计数时钟源(仅T/C2)。
(二)寄存器1、TCNT0——TC0计数寄存器TCNT0是T/C0的计数值寄存器。
写TCNT0寄存器将在下一个定时器时钟周期中阻塞比较匹配。
因此,在计数器运行期间修改TCNT0的内容,有可能将丢失一次TCNT0与OCR0的匹配比较操作2、OCR0——输出比较寄存器8位寄存器OCR0中的数据用于同TCNT0寄存器中的计数值进行匹配比较。
PWM波的原理及实际应用
PWM波的原理及实际应用1. 什么是PWM波?PWM(Pulse Width Modulation)是脉宽调制的缩写,是一种在数字电子中使用的一种调制方式。
它可以将不同频率和占空比的信号合成一个数字信号输出。
2. PWM波的原理PWM波是通过不同占空比的方波脉冲信号来模拟模拟信号的一种调制方式。
在PWM波中,方波的宽度是固定的,但占空比可以根据需要调节。
PWM波的输出是由一个基准频率和一个具有不同占空比的方波脉冲信号组成的。
占空比表示方波信号中高电平所占的时间与一个周期的时间比例。
例如,一个50%的占空比表示高电平的时间等于一个周期时间的一半。
3. PWM波的应用3.1 转换器控制PWM波广泛应用于各种类型的转换器控制中,包括DC-DC转换器和AC-DC转换器。
通过调整PWM波的占空比,可以控制转换器的输出电压和电流。
3.2 电机控制PWM波被广泛应用于电机控制中,特别是直流电机和步进电机。
通过改变PWM波的占空比,可以控制电机的转速和转向。
3.3 照明控制PWM波在照明控制中也有广泛的应用。
通过改变PWM波的占空比,可以控制灯的亮度。
这种方式比传统的调光方式更加高效和节能。
3.4 音频处理PWM波还可以用于音频处理。
在数字音频系统中,PWM波可以模拟模拟音频信号,从而实现音频的数字化和信号处理。
4. PWM波的优点4.1 简单高效PWM波的产生和控制非常简单,只需要一个计时器和一个比较器即可。
这使得PWM波成为一种非常高效的信号调制方式。
4.2 精确控制通过改变PWM波的占空比,可以实现对电压、电流、亮度等的精确控制。
这使得PWM波在工业控制和调整中非常有用。
4.3 低功耗PWM波相对于其他调制方式来说,功耗非常低。
因为只有在高电平时才会有电流流过,而在低电平时几乎没有电流流过。
4.4 高抗干扰性PWM波在传输过程中具有较高的抗干扰性。
传输过程中,一旦脉冲信号丢失,由于脉冲宽度较大,临界点的波形扰动对结果影响较小,因此抗干扰性较强。
用片内定时器实现16位PWM(an010)
Voutput = VDD ×
pulsewidth 65536
方程 2. 计算平均输出电压
硬件配置
端口引脚 P2.7 用于输出 PWM 波形到 PWM 滤波器 PRT2CF 将 P2.7 设为推挽输出方式 ; 设置 P2.7 为推挽方式 orl PRT2CF, #80h 另外 如果使用 Cygnal 的 C8051F226-TB 目标板 以使端口引脚 P2.7 连接到低通滤波器 必须用跨接片将 PWMIN 跳线短接 我们通过设置端口 2 配置寄存器
用软件 定时器 0 ISR 产生 PWM 波形
PWM 波形是中断服务程序 ISR 通过切换端口引脚电平产生的 该 ISR 是具有两个状态的 状态机 在一个状态 输出引脚为高电平 PWM 波形的高电平部分 在该状态 定时器 0 被装 入 pulse_width 值 MCU 退出 ISR 在下一个状态 端口引脚变为 低 电平 通过清零 P2.7 位
占空度% =
pulsewidth × 100 65536
方程 1. 计算占空度 占空度表示波形为高电平的平均时间 这一时间值将在低通滤波器中被转换成电压值 对于一
2
AN010-1.1 FEB01
AN010
个给定的 pulse_width 值
用一个片内定时器实现 16 位 PWM
对应的平均输出电压计算如下
等待中断
定时器 0 的 ISR 定时器 0 溢出中断服务程序 用于产生 PWM 波形 这是通过对端口引脚 P2.7 进行电平切换实现的 在完成对各种外设的初始化后 可以用一个简单的原地跳转指令等待 中断 这是最常见的作法 但是 当 ISR 用于产生 PWM 波形时 会因中断响应延迟时间的微小变 化而出现不希望的微小时序抖动 中断响应延迟时间不同是因为 C8051 在完成当前指令后才能转 向中断服务程序 转移到中断服务程序所需的时间取决于中断条件发生时 MCU 处于双周期转移指 令的哪一个周期 为避免这种情况 我们可以利用 C8051 MCU 的等待方式 当一个被允许的中断 发生时 MCU 会被自动从等待方式 唤醒 由于 CPU 内核始终处于同一状态 这就消除了中断 延迟的不一致性 注意 在等待方式下 所有外设 例如定时器 都照样工作 将电源控制寄存器 PCON 中的等待方式选择位置 1 可使 C8051 进入等待方式 在从中 断服务程序返回时 用一条转移语句将程序计数器送回到设置等待方式的那条指令处 ; 在等待方式下等待中断 IDLE: orl PCON, #01h sjmp IDLE 当从一个 ISR 返回 reti 指令 时 MCU 将跳回到 sjmp 指令 设置等待方式位的那条指令 然后等待下一个中断条件发生 程序从这条指令又循环回到
M16的16位定时器(普通模式)程序

//==================================================================== //==========================文件说明BEGIN================================ //---------------------------2009-4-18--------------------------------- /*本程序为M16的16位定时器普通模式最简单的应用 晶振晶振::16M (时钟频率不同时定时钟频率不同时定时器初值不同时器初值不同时器初值不同)) NUM 的值1秒加一注:程序已包含液晶显示头文件LCD12864.H *///=========================文件说明END================================= //====================================================================#include<iom16v.h> #include<macros.h> #include"LCD12864.H" #define uchar unsigned char #define uint unsigned int uchar num;/*设置中断向量设置中断向量,,miao 是自定义中断函数名是自定义中断函数名,,9是中断向量号*/(注1) #pragma interrupt_handler miao:9//******************************************** //// I/O 端口初始化 ////******************************************** void PORT_init() {/*将PA 口都设置位输出*/ DDRA=0XFF; PORTA=0XFF; }//******************************************** //// 显示函数 ////******************************************** void dis_num() {//在12864右下角显示NUM 值 lcd_w_char(0x9e,num/10+'0'); lcd_w_data(num%10+'0'); }//============================================ //// 主函数 ////============================================ void main() {PORT_init(); // I/O 端口初始化 lcd_init(); //LCD 初始化TCCR1A&=0X0F; //设置工作方式 (注2)TCCR1B=0X04; //(256分频) (注3)TCNT1=0X0BDC; //设置定时初值 (注4)TIMSK|=BIT(2);//T/C1 溢出中断使能SREG|=BIT(7); //开总中断lcd_w_str(0x9e,"00秒"); //初始显示 while(1) { } }//******************************************** // 中断函数//******************************************** void miao() {TCNT1=0X0BDC; //重新设置定时初值 num++; //中断一次NUM 值加一 if(60==num) //满60清零 num=0;dis_num(); //显示NUM 值 }要点要点::1. 定时中断产生过程定时中断产生过程::和51单片机定时中断一样单片机定时中断一样,,TCNT1从初始值计数从初始值计数,,到达TOP(即0XFFFF)后产生溢出,再从新的初始值计数到TOP ,循环循环。
ATmega16定时器0产生PWM波
#include <delay.h>
#define uchar unsigned char
#define uint unsigned int
uint count;
/********以下是端口初始化函数********/
void port_init()
{
DDRB.3=1;
}
for(count=255;count>0;count--) //OCR=255时,LED最暗,然后逐渐变亮
{
OCR0= count;
delay_ms(20);
}
}
}
void main(void)
{
port_init();
timer0_init();
while(1)
{
for(count=0;count<256;count++) //OCR=0时,LED最亮,然后逐渐变暗
{
OCR0=count; //比较匹配寄存器赋值
delay_ms(20); //延时一段时间,以观察效果
atmega16pwmpwm定时器pwm定时器工作原理单片机产生pwm波产生pwm波定时器通道实现pwmpwm波产生芯片atmega16atmega16单片机atmega16引脚图
/********************************************
* TC0产生PWM *
*实验内容:TC0产生PWM输出,并显示在LED灯上*
PORTB.3=0;
}
/********定时器0初始化********/
void timer0_init()
PIC系列微控器的PWM功能及应用
工 场经 验 P I C 系列微控器的PWM 功能及应用温照方 张莹莹 摘要 介绍P I C 17C 4X 系列微控器所具有的两个通道PWM 输出特性,重点讨论了可变脉宽、可变周期及分辨力等应用问题。
关键词 微控器 PWM 脉宽 周期 分辨力Abstract T h is p ap er in troduces P I C 17C 4X M icrocon tro ller one of the featu res :tw o PWM ou t 2p u ts .T he variab le p eri od ,variab le p u lse w idth ,reso lu ti on and app licati on are discu ssed em p hati 2cally .Key words M icrocon tro ller PWM Pu lse w idth Peri od R eso lu ti on收稿日期:1999-04-201 PWM 输出周期及脉宽PWM 输出是使用定时器1(T i m er 1)和定时器2(T i m er 2)作为他们的时基,T i m er 1和T i m er 2是两个8位加法定时器,每个定时器都有一个周期寄存器,分别是PR 1和PR 2,并具有溢出中断标志位,它们不仅分别作为两个8位定时器 计数器使用,而且也可以作为一个16位定时器使用,但是当有PWM 输出时,它们不能再作为16位定时器使用。
若使PWM 输出信号,需要对PWM 1ON (TCON 2〈4〉)位进行置位,当PWM 1ON 位置1,管脚RB 2 PWM 1定义为PWM 1输出,不必考虑数据方向位(DDRB 〈2〉);当PWM 1ON 位清零,这一管脚则作为一个端口,它的方向由它的数据位(DDRB 〈2〉)控制。
类似的PWM 2ON (TCON 2〈5〉)位由RB 3 PWM 2管脚控制。
ATMEGA16定时器0
ATMEGA16定时器0(2013-04-09 21:51:35)转载▼分类:AVR标签:avr定时器0MEGA16定时器0T/C0 是一个八位定时器,主要有定时、外部事件计数、产生PWM 波形这几个功能,我们在使用这些功能之前,首先要设置T/C0 工作在合适的工作模式下。
T/C0 有四种工作模式,分别是普通模式、CTC 模式、快速PWM、相位可调的PWM 模式四种。
模式设置通过T/C0 的控制寄存器TCCR0 来完成。
1.普通模式在此模式下,T/C0 的计数寄存器TCNT0 在时钟的驱动下不停累加。
当计满后(计数值达到最大,8 位寄存器最大计数值为0xff),由于数值的溢出寄存器清零重新开始累加。
当计数器溢出后,TIFR 中的溢出标志位TOV0 会置位,也可触发中断。
所以我们可以通过查询或中断的方式得知定时器的溢出从而进行相关处理。
此模式适合定时与计数。
关于定时和计数,这里的定时功能是T/C0 在对时钟计数达到一定的值后引发中断,达到了定时功能,然而本质的过程是计数工作。
那么这里所说的计数功能是外部事件计数。
实例:T/C0 定时实验,将T/C0 设置为普通模式,对1024 分频的系统时钟进行计数,计满发生中断,40 次中断递增一个计数用的变量,主函数则不停显示这个变量。
第一步:开总中断,SREG |= 0X80;第二步:开T/C0 溢出中断第三步:模式设置、分频设置、匹配输出模式设置T/C0 控制寄存器用于设置工作模式,时钟分频和波形输出模式。
这里T/C0 设置为普通模式,WGM00-WGM01设置为00。
此模式下定时器的TOP 值,也就是能够达到的最大计数值为0xFF。
TOV0 在计数器计满后置位,也就是计到MAX,八位的定时器计数达到255 为计满。
低三位设置定时器时钟。
T/C0 在系统时钟的分频或外部时钟的驱动下递增或递减。
系统时钟也就是晶振的大小是11.0592MHZ。
此实验中,设置为1024 分频。
ATmeag16单片机在拖拉机仪表中的应用
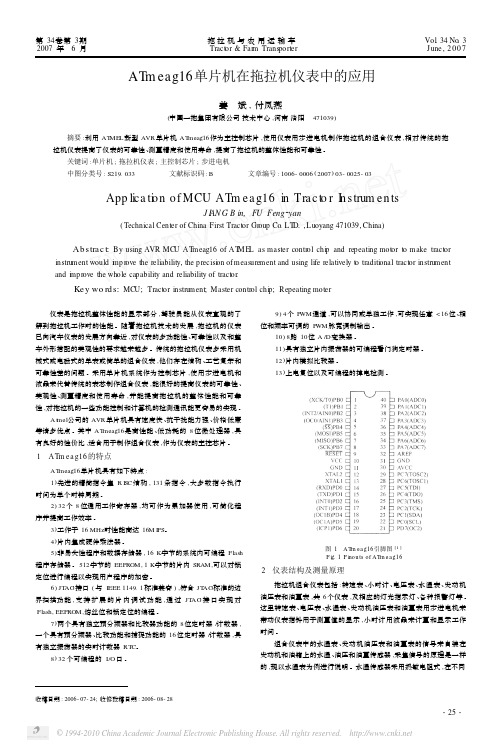
AT m eag16单片机在拖拉机仪表中的应用姜 斌,付凤燕(中国一拖集团有限公司技术中心,河南洛阳 471039)摘要:利用AT MEL 新型AVR 单片机AT meag16作为主控制芯片,使用仪表用步进电机制作拖拉机的组合仪表,相对传统的拖拉机仪表提高了仪表的可靠性、测量精度和使用寿命,提高了拖拉机的整体性能和可靠性。
关键词:单片机;拖拉机仪表;主控制芯片;步进电机中图分类号:S219.033 文献标识码:B 文章编号:1006-0006(2007)03-0025-03App li ca ti o n o f MCU ATm eag16i n Trac t o r I n s trum en tsJ I AN G B in,FU Feng 2yan(Technical Center of China First Tract or Gr oup Co .LT D.,Luoyang 471039,China )Ab s tra c t:By using AVR MC U AT meag16of ATM E L as master contr ol chi p and repeating mot or t o make tract or instru ment would i m p r ove the reliability,the p recisi on of measure ment and using life relatively t o traditi onal tract or instru ment and i m p r ove the whole capability and reliability of tract or .Key wo rd s:MCU;Tract or instru ment;Master contr ol chi p;Repeating moter 仪表是拖拉机整体性能的显示部分,驾驶员能从仪表直观的了解到拖拉机工作时的性能。
pwm工作的基础原理及应用
PWM工作的基础原理及应用什么是PWM?PWM (Pulse Width Modulation) 是一种通过控制信号的占空比来控制电平的技术。
通过改变信号的高电平与低电平持续时间的比例,PWM技术可以模拟模拟信号,实现对设备的精确控制。
PWM的基本原理PWM技术是通过周期性调制信号来模拟模拟信号。
通常情况下,PWM信号的周期是固定的,但是信号的高电平和低电平持续时间可以根据需求进行改变。
通过改变占空比(高电平持续时间与周期之比),可以控制输出信号的有效值,实现对设备的控制。
PWM的工作过程1.设置PWM周期和频率2.设置占空比3.产生PWM信号PWM的应用1. 电机控制•直流电机控制:通过调整PWM信号的占空比,可以实现对直流电机的转速控制。
•交流电机控制:通过将PWM信号与交流电源进行整流和滤波处理,可以实现对交流电机的转速控制。
2. 电源管理•DC-DC转换器:PWM技术广泛应用于DC-DC转换器中,通过调整占空比来调整输出电压。
•电池充放电:PWM技术可以在充放电过程中实现对电池的控制,如恒流充电、恒压充电等。
3. LED调光•PWM技术被广泛用于LED调光控制,通过调整PWM信号的占空比来改变LED的亮度。
4. 温度控制•PWM技术可以通过调整占空比来控制加热器的功率,从而实现温度的控制。
5. 音频处理•PWM技术可以用于音频信号的数字处理,通过将音频信号转化为PWM信号,可以实现音频的放大和滤波。
6. 无线通信•PWM技术可以用于无线通信中的调制和解调,通过改变PWM信号的占空比来实现数字信号的传输。
7. 传感器信号调节•PWM技术可以对传感器信号进行调节,通过改变PWM信号的占空比来调整传感器的灵敏度。
总结通过对PWM技术的学习和应用,我们可以实现对各种设备的精确控制。
无论是电机控制、电源管理还是其他领域,PWM技术都发挥着重要的作用。
希望通过本文的介绍,可以帮助读者更好地理解PWM技术的基础原理和应用。