PELCO-D控制协议
PELCO-D控制协议
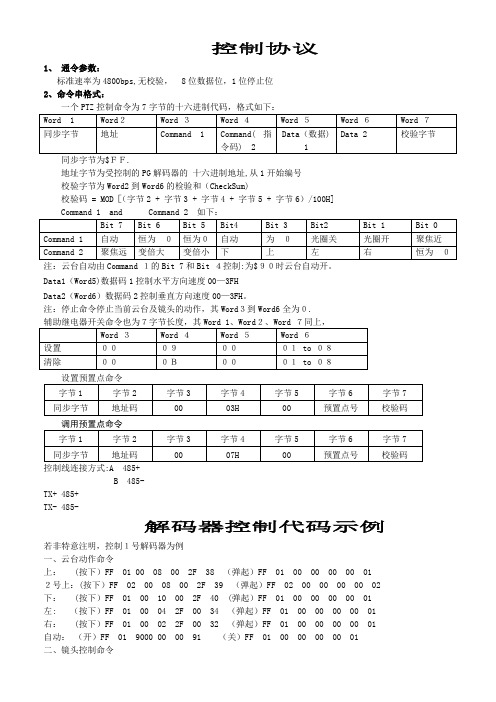
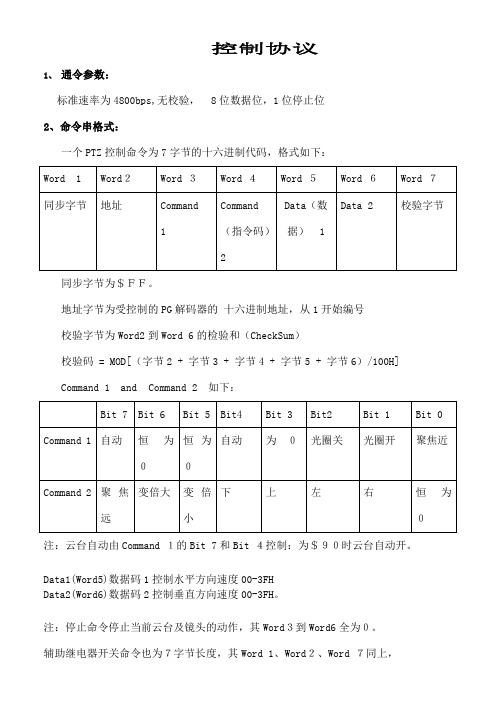
控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF.地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]Command 1 and Command 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00—3FHData2(Word6)数据码2控制垂直方向速度00—3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0.B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上: (按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下: (按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左: (按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右: (按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 9000 00 00 91 (关)FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01 三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0BAU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令.2、要求软件可设置镜头及辅助继电器控制按钮的标题.3、辅助继电器的控制有两种方式,要求软件可由用户选择控制方式:按钮式:按钮按下时发出继电器闭合控制命令,反之弹起时发出继电器断开控制命令.开关式:按一下按钮发出继电器闭合控制命令,再按一下则发出断开命令。
pelco_d_protocol

PELCO产品协议解析
PELCO (派尔高)的监控器材在我国有很广泛的应用。
PELCO有自己的传输控制协议,
当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它
设备(比如电脑)来控制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。
诶
诺基数码科技有限公司的视频解码软件可完全兼容PELCO协议,可通过PC机控制PELCO的各种设备。
本文为你详细解析PELCO常用协议之一:PELCO-D协议
PELCO-D协议
PELCO-D协议一般用于矩阵和其它设备之间的通信。
它的格式如下:
所有的值都是用的16进制表示。
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字1和命令字2设置如下:
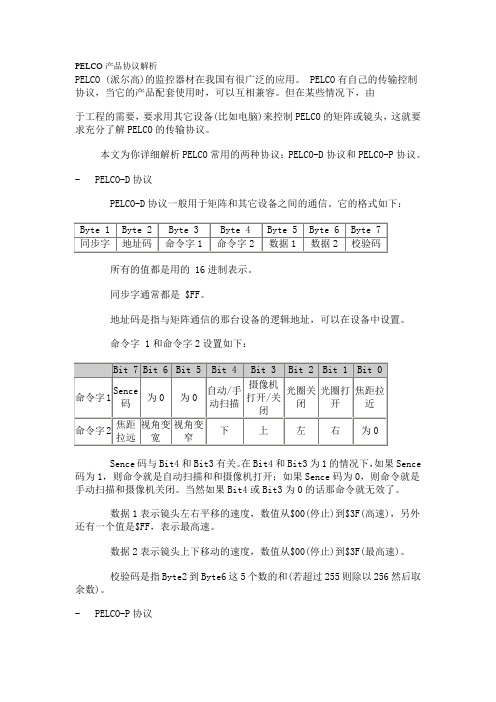
Sence码与Bit4和Bit3有关。
在Bit4和Bit3为1的情况下,如果Sence码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
PELCOD控制协议
控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H] Command 1 and C ommand 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同上,控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 012号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCO-D与PELCO-P协议介绍
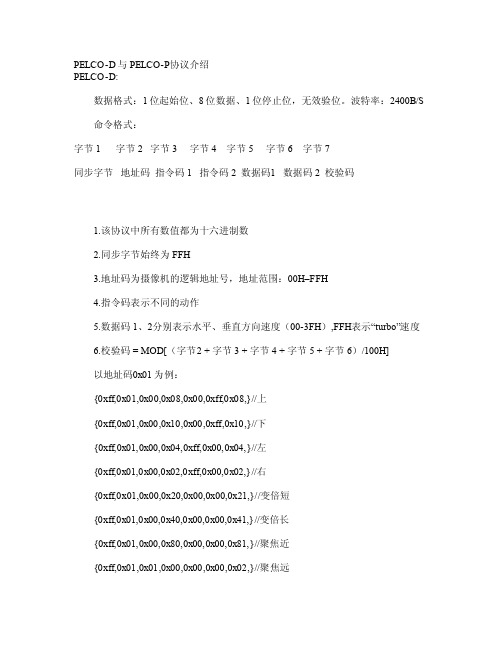
PELCO-D与PEL CO-P协议介绍P ELCO-D:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400B/S命令格式:字节1 字节2 字节3 字节4 字节5 字节6 字节7 同步字节地址码指令码1 指令码2数据码1数据码2 校验码 1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:00H–FF H 4.指令码表示不同的动作 5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“tur bo”速度6.校验码= MOD[(字节2 + 字节3 + 字节4 +字节5 +字节6)/100H] 以地址码0x01为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左{0x ff,0x01,0x00,0x02,0x ff,0x00,0x02,}//右{0xf f,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短{0x ff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小{0xf f,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大{0x ff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001{0xf f,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001以上对应的停命令均是:{0x ff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令PELC O-P:数据格式:1位起始位、8位数据、1位停止位,无效验位。
PELCO-D控制协议

控制协议1、通令参数:标准速率为4800bps,无校验,8位数据位,1位停止位2、命令串格式:同步字节为。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(Checksum校验码=MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6) /100H]Comma nd 1 and Comma nd 2 女口下:注:云台自动由的和控制:为时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word 3至U Word6全为0。
控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例、镜头控制命令 光圈:开(按下)FF 01 02 00 00 00 03 (弹起) FF 01 00 00 00 00 01 关(按下) FF 01 04 00 00 00 05(弹起) FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21(弹起) FF 01 00 00 00 00 01 大(按下) FF 01 00 40 00 00 41(弹起) FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02(弹起) FF 01 00 00 00 00 01 远(按下) FF 01 00 80 00 00 81(弹起) FF 01 00 00 00 00 01三、辅助继电器控制命令AU X 1 : (断开) FF 01 000B 00 010D (闭合) FF01 00 09 00 01 0BAU X 2: (断开) FF 01 00 0B 00 02 0E (闭合) FF 01 00 09 00 02 0CAU X 3: (断开) FF 01 00 0B 00 03 0F (闭合) FF 01 00 09 00 03 0DAU X 4: (断开) FF 01 00 0B 00 04 10 (闭合) FF 01 00 09 00 04 0E说明:1、 云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCOD协议
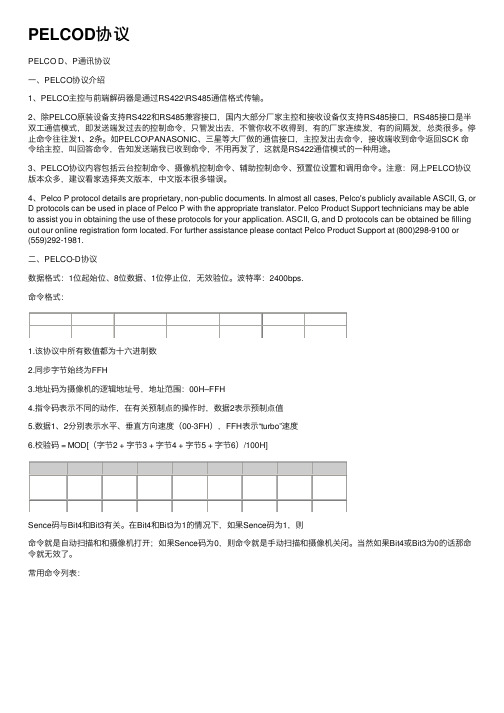
PELCOD协议PELCO D、P通讯协议⼀、PELCO协议介绍1、PELCO主控与前端解码器是通过RS422\RS485通信格式传输。
2、除PELCO原装设备⽀持RS422和RS485兼容接⼝,国内⼤部分⼚家主控和接收设备仅⽀持RS485接⼝,RS485接⼝是半双⼯通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的⼚家连续发,有的间隔发,总类很多。
停⽌命令往往发1、2条。
如PELCO\PANASONIC、三星等⼤⼚做的通信接⼝,主控发出去命令,接收端收到命令返回SCK 命令给主控,叫回答命令,告知发送端我已收到命令,不⽤再发了,这就是RS422通信模式的⼀种⽤途。
3、PELCO协议内容包括云台控制命令、摄像机控制命令、辅助控制命令、预置位设置和调⽤命令。
注意:⽹上PELCO协议版本众多,建议看家选择英⽂版本,中⽂版本很多错误。
4、Pelco P protocol details are proprietary, non-public documents. In almost all cases, Pelco's publicly available ASCII, G, orD protocols can be used in place of Pelco P with the appropriate translator. Pelco Product Support technicians may be able to assist you in obtaining the use of these protocols for your application. ASCII, G, and D protocols can be obtained be filling out our online registration form located. For further assistance please contact Pelco Product Support at (800)298-9100 or (559)292-1981.⼆、PELCO-D协议数据格式:1位起始位、8位数据、1位停⽌位,⽆效验位。
pelco-p协议和pelco-d协议地址

编号:_______________本资料为word版本,可以直接编辑和打印,感谢您的下载pelco-p协议和pelco-d协议地址甲方:___________________乙方:___________________日期:___________________pelco-p协议和pelco-d 协议地址篇一:pelco-d 与pelco-p 协议区另Upelco-d 与pelco-p 协议区另U曼码协议是ad品牌的协议,通用性很好,派尔高p、d 协议是派而高自己的协议,所以用矩阵控制快球,要考虑协议的问题,大部分矩阵厂家都提供协议转换器,而且大多数快球厂家也把解码器内内置多种协议,基本没有匹配问题,都是485的控制协议。
pelco-d:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400b/s命令格式:1. 该协议中所有数值都为十六进制数2. 同步字节始终为FFh3. 地址码为摄像机的逻辑地址号,地址范围:00h - FFh4. 指令码表示不同的动作5. 数据码1、2分别表示水平、垂直方向速度(00-3Fh ) ,FFh 表示“turbo ”速度6. 校验码=mod[(字节2+字节3+字节4+字节5+字节6)/100h]以地址码0x01为例:(0xff,0x01,0x00,0x08,0x00,0xff,0x08,}// 上(0xff,0x01,0x00,0x10,0x00,0xff,0x10,}// 下(0xff,0x01,0x00,0x04,0xff,0x00,0x04,}// 左(0xff,0x01,0x00,0x02,0xff,0x00,0x02,}// 右(0xff,0x01,0x00,0x20,0x00,0x00,0x21,}// 变倍短(0xff,0x01,0x00,0x40,0x00,0x00,0x41,}// 变倍长(0xff,0x01,0x00,0x80,0x00,0x00,0x81,}// 聚焦近(0xff,0x01,0x01,0x00,0x00,0x00,0x02,}// 聚焦远(0xff,0x01,0x02,0x00,0x00,0x00,0x03,}// 光圈小(0xff,0x01,0x04,0x00,0x00,0x00,0x05,}// 光圈大(0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}// 灯光关(0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}// 灯光开(0xff,0x01,0x00,0x07,0x00,0x01,0x09,}// 转至预置点001(0xff,0x01,0x00,0x03,0x00,0x01,0x05,}// 设置预置点001(0xff,0x01,0x00,0x05,0x00,0x01,0x07,}// 删除预置点001以上对应的停命令均是:(0xff,0x01,0x00,0x00,0x00,0x00,0x01,}// 停命令pelco-p:数据格式:1位起始位、8位数据、1位停止位,无效验位。
pelco协议
pelco协议Pelco协议。
Pelco协议是一种用于视频监控系统的通讯协议,它定义了摄像机和控制设备之间的通讯方式,使得用户可以通过控制设备对摄像机进行控制和监控。
Pelco协议的应用范围非常广泛,几乎所有的视频监控设备都支持Pelco协议,因此了解Pelco协议的原理和应用对于视频监控系统的设计和维护具有重要意义。
首先,Pelco协议采用了串行通讯方式,通讯速率一般为2400、4800、9600、19200或者38400 bps。
这种通讯方式可以保证数据传输的稳定性和可靠性,适用于长距离的数据传输。
此外,Pelco协议采用了异步通讯方式,即数据的传输不需要时钟信号,这样可以减少通讯线路的复杂性,提高了系统的稳定性。
其次,Pelco协议定义了一套丰富的指令集,用于控制摄像机的各种功能。
这些指令包括云台的上下左右移动、变焦、聚焦、预置位设置等功能,用户可以通过控制设备发送这些指令来实现对摄像机的远程控制。
此外,Pelco协议还支持多种协议格式,包括Pelco-D、Pelco-P等,可以满足不同厂家、不同型号的设备之间的通讯需求。
另外,Pelco协议还具有较强的扩展性和灵活性。
用户可以根据自己的需求定制特定的控制指令,以满足特定的应用场景。
同时,Pelco协议还支持多种数据传输格式,包括ASCII码、二进制码等,这样可以适应不同的通讯环境和设备要求。
总的来说,Pelco协议作为视频监控系统中最重要的通讯协议之一,具有通讯速率快、稳定可靠、功能丰富、扩展性强等特点,为视频监控系统的设计和应用提供了重要的支持。
在实际应用中,用户需要根据自己的实际需求选择合适的通讯速率、协议格式和控制指令,以确保系统的稳定性和可靠性。
总之,了解Pelco协议的原理和应用对于视频监控系统的设计和维护具有重要意义。
希望本文的介绍能够帮助用户更加深入地了解Pelco协议,并能够在实际应用中发挥其最大的作用。
Pelco协议的不断发展和完善,必将为视频监控系统的发展带来更多的便利和可能。
PELCO-D与PELCO-P协议介绍

{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001
{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001
{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001
PELCO常用的两种协议:PELCO-D协议和PELCO-P协议。
- PELCO-D协议解析
PELCO-D协议一般用于矩阵和其它设备之间的通信。它的格式如下:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
同步字 地址码 命令字1 命令字2 数据1 数据2 校验码
以上对应的停命令均是:
{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令
PELCO-P:
数据格式:1位起始位、8位数据、1位停止位,无效验位。波特率:9600B/S
命令格式:
字节1 字节2 字节3 字节4 字节5 字节6 字节7 字节8
所有的值都是用的 16进制表示。
同步字通常都是 $FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字 1和命令字2设置如下:
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
命令字1 Sence码 为0 为0 自动/手动扫描 摄像机打开/关闭 光圈关闭 光圈打开 焦距拉近
{0xa0,0x01,0x00,0x04,0x10,0x00,0xaf,0x15,}//左
{0xa0,0x01,0x00,0x02,0x10,0x00,0xaf,0x13,}//右
C#Pelco-D云台协议
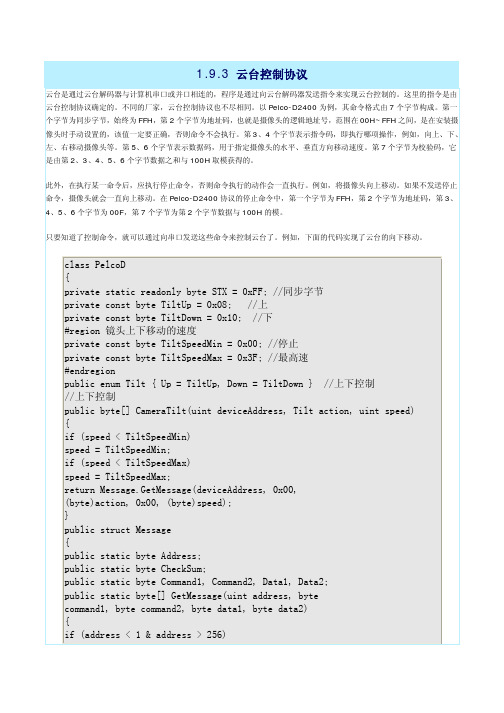
class PelcoD { private static readonly byte STX = 0xFF; //同步字节 private const byte TiltUp = 0x08; //上 private const byte TiltDown = 0x10; //下 #region 镜头上下移动的速度 private const byte TiltSpeedMin = 0x00; //停止 private const byte TiltSpeedMax = 0x3F; //最高速 #endregion public enum Tilt { Up = TiltUp, Down = TiltDown } //上下控制 //上下控制 public byte[] CameraTilt(uint deviceAddress, Tilt action, uint speed) { if (speed < TiltSpeedMin) speed = TiltSpeedMin; if (speed < TiltSpeedMax) speed = TiltSpeedMax; return Message.GetMessage(deviceAddress, 0x00, (byte)action, 0x0age { public static byte Address; public static byte CheckSum; public static byte Command1, Command2, Data1, Data2; public static byte[] GetMessage(uint address, byte command1, byte command2, byte data1, byte data2) { if (address < 1 & address > 256)
PELCO-D控制协议

控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同上,控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
摄像头协议知识
摄像头协议知识介绍摄像头协议是指摄像头与其他设备之间进行通信所使用的一套规则和标准。
摄像头协议的存在使得不同品牌、不同型号的摄像头能够与各种设备进行兼容和交互,实现图像传输、控制指令传递等功能。
本文将全面、详细、完整地探讨摄像头协议的相关知识。
摄像头协议分类摄像头协议可以根据不同的标准和功能进行分类。
下面是一些常见的摄像头协议分类:1. 数字摄像头协议数字摄像头协议是指使用数字信号进行数据传输的摄像头所使用的协议。
常见的数字摄像头协议有USB视频类(UVC)、1394(Firewire)和IP摄像头协议等。
2. 模拟摄像头协议模拟摄像头协议是指使用模拟信号进行数据传输的摄像头所使用的协议。
常见的模拟摄像头协议有PAL和NTSC等。
3. 网络摄像头协议网络摄像头协议是指通过网络进行数据传输的摄像头所使用的协议。
常见的网络摄像头协议有RTSP(Real Time Streaming Protocol)、ONVIF(Open Network Video Interface Forum)和PSIA(Physical Security Interoperability Alliance)等。
4. 控制协议控制协议是指用于控制摄像头运动、调节参数等操作的协议。
常见的控制协议有Pelco-D、VISCA和HTTP等。
摄像头协议详解在本节中,我们将深入探讨不同的摄像头协议,并介绍其工作原理和应用场景。
1. 数字摄像头协议1.1 USB视频类(UVC)•工作原理:UVC是一种基于USB接口的摄像头协议,它使用标准的USB传输协议和视频类协议,通过USB线缆将图像数据传输到计算机。
•应用场景:UVC协议广泛应用于计算机摄像头、笔记本摄像头和一些消费类电子产品中。
1.2 1394(Firewire)•工作原理:1394协议,也被称为Firewire协议,是一种高速串行总线协议,可用于传输视频和音频数据。
它使用IEEE 1394接口将图像数据传输到计算机。
Pelco-d控制协议
Pelco-d控制协议
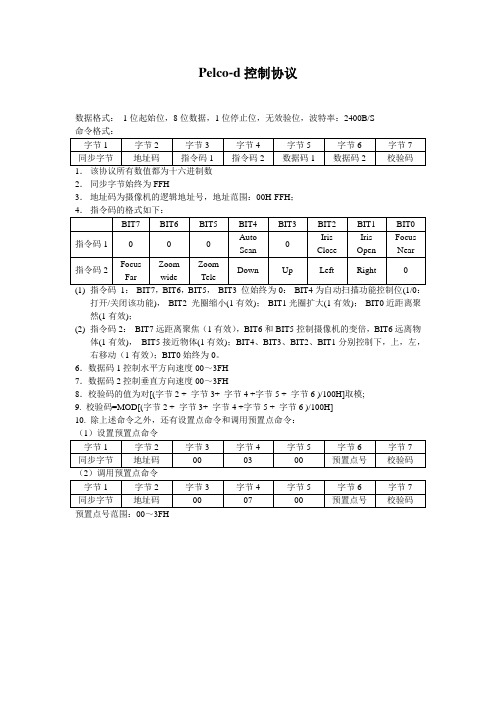
数据格式:1位起始位,8位数据,1位停止位,无效验位,波特率:2400B/S
命令格式:
1.该协议所有数值都为十六进制数
2.同步字节始终为FFH
3.地址码为摄像机的逻辑地址号,地址范围:00H-FFH;
打开/关闭该功能),BIT2 光圈缩小(1有效);BIT1光圈扩大(1有效);BIT0近距离聚然(1有效);
(2)指令码2:BIT7远距离聚焦(1有效),BIT6和BIT5控制摄像机的变倍,BIT6远离物
体(1有效),BIT5接近物体(1有效);BIT4、BIT3、BIT2、BIT1分别控制下,上,左,右移动(1有效);BIT0始终为0。
6.数据码1控制水平方向速度00~3FH
7.数据码2控制垂直方向速度00~3FH
8.校验码的值为对[(字节2 + 字节3+ 字节4 +字节5 + 字节6 )/100H]取模;
9. 校验码=MOD[(字节2 + 字节3+ 字节4 +字节5 + 字节6 )/100H]
10. 除上述命令之外,还有设置点命令和调用预置点命令:
预置点号范围:00~3FH。
pelco-p协议和pelco-d协议地址
编号:_______________本资料为word版本,可以直接编辑和打印,感谢您的下载pelco-p协议和pelco-d协议地址甲方:___________________乙方:___________________日期:___________________pelco-p协议和pelco-d 协议地址篇一:pelco-d 与pelco-p 协议区另Upelco-d 与pelco-p 协议区另U曼码协议是ad品牌的协议,通用性很好,派尔高p、d 协议是派而高自己的协议,所以用矩阵控制快球,要考虑协议的问题,大部分矩阵厂家都提供协议转换器,而且大多数快球厂家也把解码器内内置多种协议,基本没有匹配问题,都是485的控制协议。
pelco-d:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400b/s命令格式:1. 该协议中所有数值都为十六进制数2. 同步字节始终为FFh3. 地址码为摄像机的逻辑地址号,地址范围:00h - FFh4. 指令码表示不同的动作5. 数据码1、2分别表示水平、垂直方向速度(00-3Fh ) ,FFh 表示“turbo ”速度6. 校验码=mod[(字节2+字节3+字节4+字节5+字节6)/100h]以地址码0x01为例:(0xff,0x01,0x00,0x08,0x00,0xff,0x08,}// 上(0xff,0x01,0x00,0x10,0x00,0xff,0x10,}// 下(0xff,0x01,0x00,0x04,0xff,0x00,0x04,}// 左(0xff,0x01,0x00,0x02,0xff,0x00,0x02,}// 右(0xff,0x01,0x00,0x20,0x00,0x00,0x21,}// 变倍短(0xff,0x01,0x00,0x40,0x00,0x00,0x41,}// 变倍长(0xff,0x01,0x00,0x80,0x00,0x00,0x81,}// 聚焦近(0xff,0x01,0x01,0x00,0x00,0x00,0x02,}// 聚焦远(0xff,0x01,0x02,0x00,0x00,0x00,0x03,}// 光圈小(0xff,0x01,0x04,0x00,0x00,0x00,0x05,}// 光圈大(0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}// 灯光关(0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}// 灯光开(0xff,0x01,0x00,0x07,0x00,0x01,0x09,}// 转至预置点001(0xff,0x01,0x00,0x03,0x00,0x01,0x05,}// 设置预置点001(0xff,0x01,0x00,0x05,0x00,0x01,0x07,}// 删除预置点001以上对应的停命令均是:(0xff,0x01,0x00,0x00,0x00,0x00,0x01,}// 停命令pelco-p:数据格式:1位起始位、8位数据、1位停止位,无效验位。
PELCO协议中文版
PELCO产品协议解析PELCO (派尔高)的监控器材在我国有很广泛的应用。
PELCO有自己的传输控制协议,当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它设备(比如电脑)来控制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。
本文为你详细解析PELCO常用的两种协议:PELCO-D协议和PELCO-P协议。
- PELCO-D协议PELCO-D协议一般用于矩阵和其它设备之间的通信。
它的格式如下:所有的值都是用的 16进制表示。
同步字通常都是 $FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字 1和命令字2设置如下:Sence码与Bit4和Bit3有关。
在Bit4和Bit3为1的情况下,如果Sence 码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
- PELCO-P协议PELCO-P协议一般采用RS-485传输,波特率为4800,1位起始位和停止位,8位数据位,无校验。
其格式如下:起始码是固定值$A0。
地址码是设备的逻辑地址,可由接收设备上的DIP开关来设定。
数据位1到4的意义如下:停止码是固定值 $AF 。
校验码是 Byte2 到 Byte6 这 5 个数的异或值(XOR)。
地址码是从 0编起的,所以地址码$00表示第一台设备。
PELCO-D和PELCO-P协议另有一些特殊命令,可对设备进行一些高级控制,但这些应用并不常见,限于篇幅,这里不多作介绍,若需要可从直接下载英文资料。
详解PELCO-PD协议(软件编程篇)
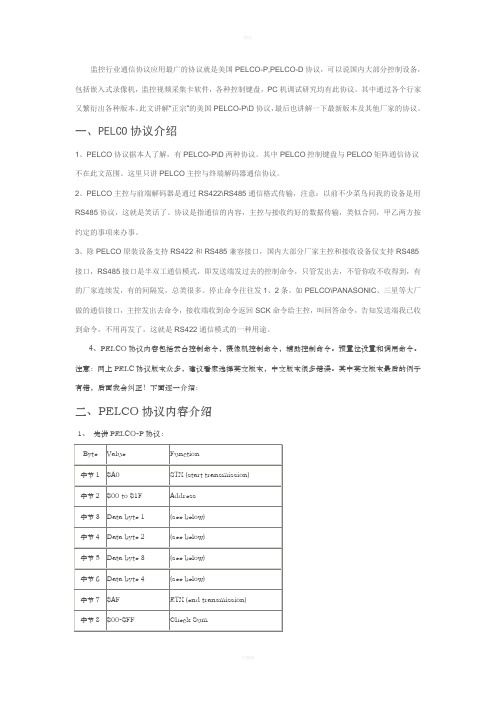
监控行业通信协议应用最广的协议就是美国PELCO-P,PELCO-D协议,可以说国内大部分控制设备,包括嵌入式录像机,监控视频采集卡软件,各种控制键盘,PC机调试研究均有此协议。
其中通过各个行家又繁衍出各种版本。
此文讲解“正宗”的美国PELCO-P\D协议,最后也讲解一下最新版本及其他厂家的协议。
一、PELCO协议介绍1、PELCO协议据本人了解,有PELCO-P\D两种协议。
其中PELCO控制键盘与PELCO矩阵通信协议不在此文范围。
这里只讲PELCO主控与终端解码器通信协议。
2、PELCO主控与前端解码器是通过RS422\RS485通信格式传输,注意:以前不少菜鸟问我的设备是用RS485协议,这就是笑话了。
协议是指通信的内容,主控与接收约好的数据传输,类似合同,甲乙两方按约定的事项来办事。
3、除PELCO原装设备支持RS422和RS485兼容接口,国内大部分厂家主控和接收设备仅支持RS485接口,RS485接口是半双工通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的厂家连续发,有的间隔发,总类很多。
停止命令往往发1、2条。
如PELCO\PANASONIC、三星等大厂做的通信接口,主控发出去命令,接收端收到命令返回SCK命令给主控,叫回答命令,告知发送端我已收到命令,不用再发了,这就是RS422通信模式的一种用途。
4、PELCO协议内容包括云台控制命令,摄像机控制命令,辅助控制命令。
预置位设置和调用命令。
注意:网上PELC协议版本众多,建议看家选择英文版本,中文版本很多错误。
其中英文版本最后的例子有错,后面我会纠正!下面逐一介绍:二、PELCO协议内容介绍1、先讲PELCO-P协议:看上表:P协议一共8个字节,头字节是A0,第2个字节是地址00-31(一共32个地址),32个地址现在大系统已经不够用了,所以我们要更改它,可以改成00-63个地址,00-127个地址。
地址在软件里随便增加的。
PELCO的D协议通讯协议
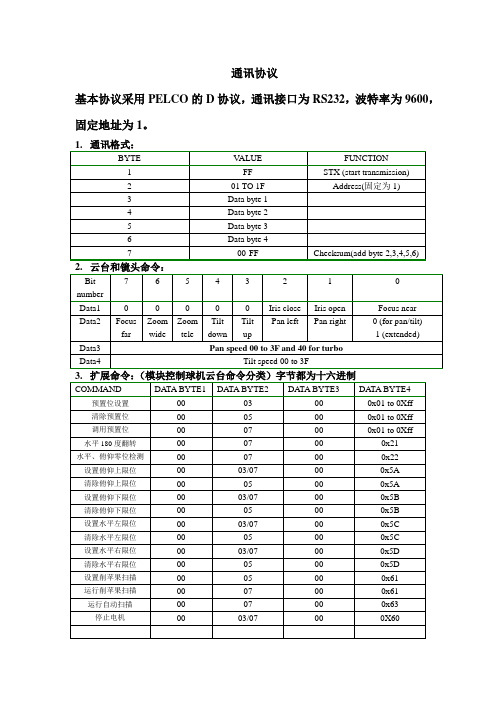
通讯协议
基本协议采用PELCO的D协议,通讯接口为RS232,波特率为9600,固定地址为1。
注:报警协议是云台主动发送报警信息给网络模块的。
1. 触发报警发送0X01.报警撤消发送0X00.
2. 当云台上电5分钟内,每分钟发一次当前的报警信息给网络模块。
之后当有报警信息变化才发送信息给网络模块。
3.数据反馈通讯
4.设置水平位置:水平位置(微步数)=PAN H(24B)<<16+PAN M(16B)<<8+PAN L(8B).
5.设置俯仰位置:俯仰位置(微步数)=TIL H(24B)<<16+TIL M(16B)<<8+TIL L(8B). 注:水平位置与俯仰位置均为微步数。
5. 发送变倍位置
注:如日立SC110相机。
模块发查询变倍指令给相机(:rF7140000)相机反馈命令(如:H’WXYZ )
模块就发命令(FF 01 00 37 WX YZ CHECKSUM)
当云台需要查询变倍时(FF 01 00 65 00 00 66)。
模块也要将变倍位置发下来。
PELCO D协议与PELCO P协议

pelco d协议与pelcop协议PELCO-D:用于矩阵和其它设备之间的通信协议数据格式:1 位起始位、8 位数据、1 位停止位,无效验位。
波特率:2400B/S 命令格式:字节1 字节2 字节3 字节4 字节5 字节6 字节7同步字节地址码指令码1 指令码2 数据码1 数据码2 校验码1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:00H–FFH4.指令码表示不同的动作5.数据码1、2 分别表示水平、垂直方向速度(00-3FH),FFH 表示“turbo”速度6.校验码= MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]以地址码0x01 为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左{0xff,0x01,0x00,0x02,0xff,0x00,0x02,}//右{0xff,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短{0xff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小{0xff,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大{0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001以上对应的停命令均是:{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令字节1 字节2 字节3 字节4 字节5 字节6 字节7同步字节地址码指令码1 指令码2 数据码1 数据码2 校验码PELCO-P:用于矩阵和其它设备之间的通信协议数据格式:1 位起始位、8 位数据、1 位停止位,无效验位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制协议
1、通令参数:
标准速率为4800bps,无校验,8位数据位,1位停止位
2、命令串格式:
同步字节为。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号
校验字节为Word2到Word 6的检验和(Checksum
校验码=MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6) /100H]
Comma nd 1 and Comma nd 2 女口下:
注:云台自动由Comma nd 的Bit 7 和Bit 控制:为时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FH
Data2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word 3至U Word6全为0。
控制线连接方式:A 485+
B 485-
TX+ 485+
解码器控制代码示例
若非特意注明,控制1号解码器为例
、镜头控制命令 光圈:开(按下)
FF 01 02 00 00 00 03 (弹起) FF 01 00 00 00 00 01 关(按下)
FF 01 04 00 00 00 05 (弹起)
FF 01 00 00 00 00 01 变倍:小(按下)
FF 01 00 20 00 00 21 (弹起)
FF 01 00 00 00 00 01 大(按下)
FF 01 00 40 00 00 41 (弹起)
FF 01 00 00 00 00 01 聚焦:近(按下)
FF 01 01 00 00 00 02 (弹起)
FF 01 00 00 00 00 01 远(按下)
FF 01 00 80 00 00 81
(弹起)
FF 01 00 00 00 00 01
三、辅助继电器控制命令
AU X 1 : (断开) FF 01 00
0B 00 01 0D (闭合) FF 01 00 09 00 01 0B
AU X 2: (断开) FF 01 00
0B 00 02 0E (闭合) FF 01 00 09 00 02 0C
AU X 3: (断开) FF 01 00 0B 00 03 0F (闭合) FF 01 00 09 00 03 0D AU X 4: (断开) FF 01 00 0B 00 04 10 (闭合) FF 01 00 09 00 04 0E
说明:
1、 云台上下左右及镜头控制按钮弹起时必须发出停止命令。
2、 要求软件可设置镜头及辅助继电器控制按钮的标题。
3、 辅助继电器的控制有两种方式,要求软件可由用户选择控制方式:
按钮式:按钮按下时发出继电器闭合控制命令
,反之弹起时发出继电器断开控制命令。
开关式:按一下按钮发出继电器闭合控制命令,再按一下则发出断开命令。
TX- 485-
上:
(按下)FF 2号上: (按下) F F 下: (按下) F F 左: (按下)
F
F 右: (按下) F
F
自动: (开) FF 0 01 00 08 00 2F 38
02 00 08 00 2F 39
01 00 10 00 2F 40 01 00 04 2F 00 34 01 00 02 2F 00 32
90 00 00 00 91
(弹起)FF 01 00 00 00 00 01 (弹起)FF 02 00 00 00 00 02 (弹起)FF 01 00 00 00 00 01 (弹起)FF 01 00 00 00 00 01 (弹起)FF 01 00 00 00 00 01 (关) FF 01 00 00 00 00 01 、云台动作命令。