关于几何光学近轴理论的说明
qin
目录试析“近轴光线” (2)0 引言 (2)1 光在球面上的反射和折射成像 (3)1.1 光在球面介面上的反射成像 (3)2 近轴物在近轴光线条件下的球面反射和折射 (7)2.1 近轴物在近轴光线条件下球面成象的反射公式 (8)2.2.近轴物在近轴光线条件下球面折射的物像公式 (10)3 结论: (12)参考文献 (12)致谢 (14)河西学院本科生毕业论文(设计)题目审批表 ......................................................... 错误!未定义书签。
河西学院本科生毕业论文(设计)任务书................................................................. 错误!未定义书签。
河西学院本科毕业论文(设计)开题报告................................................................. 错误!未定义书签。
河西学院物电系指导教师指导毕业论文情况登记表 ................................................. 错误!未定义书签。
河西学院毕业论文(设计)指导教师评审表 ............................................................. 错误!未定义书签。
河西学院本科生毕业论文(设计)答辩记录表 ......................................................... 错误!未定义书签。
试析“近轴光线”网络(河西学院物电系05(2)班甘肃张734000)指导老师:葛红摘要本文主要通过论述几何光学中的光线从单独一点发出而为球面反射或折射后所产生的像点,特别是在近轴光线条件下的球面成像问题和近轴物在近轴光线条件下球面反射的物像公式和近轴物在近轴光线条件下球面折射的物像公式,从而得到近轴物点近轴光线能够理想成像的条件,即光线和物点必须是近轴的。
[工学]第2章:近轴光学
![[工学]第2章:近轴光学](https://img.taocdn.com/s3/m/83c6d9c2b8f3f90f76c66137ee06eff9aef8498c.png)
线的计算可以一面一面的逐次计算。因为从第一面开始可以将 前一面计算出的像点作为下一面的物点,利用式(2-9)或式(2-21) 循环计算,直至最后一个折射面。其间要解决好两个问题,一 是随着前一面计算结束向后一面过渡时应将坐标原点同时从从 前一面的顶点移到后一面的顶点,即坐标原点一定是当前计算 面的顶点;二是要建立前一面计算结果与后一面起算数椐之间 的联系。
+ a4h4 + a6h6 + a8h8 + a10h10...
(1-47) (1-51) (1-52)
(h2 = x2 + y2 )
近轴范围
y
x
O
z
图2-2 透镜曲面方程所采用的坐标系
在光学系统的近轴范围内,其折射面或反射面的面形可以由
下式表示
z = 1 ch2 2
(2-1)
近轴范围
现以球面为例看看这个近轴球面定义的实质,由球面方程 式(1-44)考查比较直接。在式(1-44)中如果h与r 相比很小,允许
因为有 [PDGEP′] = [PD] + [DG]) + [GE ] + [EP′] 和 [POKP′] = [PO] + [OK ] + [KP′] 将上述这些结果代入式(2-2),有
[OK ] = [DG] + [GE ]
(2-2) (2-3)
2.2单个近轴球面的性质
又因为是在近轴范围内讨论问题,所以椐式(2-1)有
− y′ = l′ − r y −l+r
即
y′ = l′ − r y l−r
近轴光学原理的应用
近轴光学原理的应用1. 简介近轴光学是光学系统设计中非常重要的一部分,它用于描述光线从对象到像的路径。
通过近轴光学原理,可以设计和优化光学系统,使其达到预期的效果。
近轴光学原理广泛应用于众多领域,包括摄影、望远镜、显微镜以及光学传感器等。
2. 近轴光学原理的基本概念近轴光学原理基于以下几个基本概念:2.1 光线传播路径光线从一个物体上的一个点射出,经过透明介质传播,最终汇聚到像上的一个点。
近轴光学原理描述了从物体到像点的光线传播路径。
2.2 光线的折射和反射光线在通过透明介质的界面时,会发生折射现象,即光线改变传播方向。
同时,在遇到反射面时,光线会发生反射。
近轴光学原理通过描述光线在折射和反射过程中的行为来分析光学系统。
2.3 光学元件光学元件是构成光学系统的基本组成部分,包括透镜、棱镜、反射镜等。
这些光学元件可以通过近轴光学原理来描述其光学特性,并在系统设计中进行优化。
3. 近轴光学原理的应用3.1 摄影近轴光学原理在摄影领域有重要应用。
光线从对象通过透镜系统到达相机的感光元件上,形成影像。
近轴光学原理可以帮助摄影师理解光线的传播路径,通过调整相机设置或镜头焦距等参数,实现对拍摄效果的控制。
3.2 望远镜望远镜是利用透镜或反射镜将光线集中到焦点上,形成放大图像的仪器。
近轴光学原理在望远镜的设计和优化中起着关键作用。
通过改变镜头的位置和形状,调整焦距,可以获得更清晰、更明亮的图像。
3.3 显微镜显微镜是用于观察微观物体的仪器。
近轴光学原理在显微镜的设计中起着重要作用。
显微镜通过透镜和目镜将被观察物体的光线放大,使其能够被肉眼看到。
近轴光学原理可以帮助优化显微镜的放大倍数和分辨率,提高观察效果。
3.4 光学传感器光学传感器用于检测和测量光的特性,广泛应用于光通信、光电子学等领域。
近轴光学原理对于理解和优化光学传感器的灵敏度、精度和响应速度等方面非常重要。
通过近轴光学原理,可以设计出更高效、更精确的光学传感器。
近轴像面的几何光学意义

近轴像面的几何光学意义
近轴像面是指光线在通过光学系统时,近似于平行光线入射的
情况下,经过折射或反射后所聚焦的位置。
几何光学是一种简化的光学理论,它忽略了光的波动性,只考
虑光线的传播和折射规律。
在几何光学中,我们将光线看作是无限
细的线段,通过直线传播,并按照折射定律进行折射或反射。
在光学系统中,像是由光线的传播路径决定的。
当光线近似平
行地入射到光学系统时,经过折射或反射后的光线会会聚到一个点上,这个点就是近轴像面上的像。
近轴像面通常位于光学系统的焦
点附近,可以是凸透镜或凹透镜的焦点,或者是反射镜的顶点。
近轴像面在几何光学中具有重要的意义,它用于描述光线在光
学系统中的传播和成像特性。
通过研究近轴像面,我们可以了解光
线在光学系统中的聚焦情况,预测物体在成像平面上的位置和形态。
同时,近轴像面也为光学系统的设计和优化提供了重要的参考依据。
需要注意的是,近轴像面的概念是在近似条件下建立的,即入
射光线近似平行。
在实际情况中,光线的入射角度和光的波动性等
因素会对成像产生一定的影响。
因此,在进行精确的光学设计和分析时,需要考虑更加复杂的光学理论和方法。
总结起来,近轴像面在几何光学中具有重要的意义,它描述了光线在近似平行入射条件下通过光学系统后的成像位置。
通过研究近轴像面,可以预测光学系统的成像特性,并为光学系统的设计和优化提供参考。
1几何光学(2)
n′ ′ s0 = − r ; s0 = n QC n′ = r r= MC n MC n =r r= n′ Q′C
n r n′ n′
M
i′
i
′ Q
′ n
• O
n n′ n
•
′ u •u
Q
•
C
n
⇒ ∠QMC ≈ ∠MQ′C
显微镜就是工作于齐明点 调节镜头与样品的工作距 显微镜就是工作于齐明点----调节镜头与样品的工作距 就是工作于齐明点 离,以使样品台上的小物处于齐明点上。 以使样品台上的小物处于齐明点上 小物处于齐明点
色像差及其矫正
1 1 f =( − ) − n 1 r r 1 2
− 1
单球面折射系统近轴成像 折射系统 单球面折射系统近轴成像
1. 单球面折射系统的近轴成像公式
2. 单球面折射系统的焦点 3. 高斯公式 4. 单球面折射系统的放大率
对单球面折射 一般而言只能实现傍轴成像, 折射, 对单球面 折射 , 一般而言只能实现傍轴成像 , 但是 齐明点(一对特殊共轭点)可以宽光束严格成像。 齐明点(一对特殊共轭点)可以宽光束严格成像。
这对共轭点,有若干特殊的性质:从Q发出一入射光线,倾角为u, 折射角为i′,则u = i′;此时出射光线倾角u′ = i;当u = π 2 → i′ = π 2 , 折射光线恰好沿球面在该点的切线方向
理想光学系统: 理想光学系统:从物点到像点的各光线的光程相 等,物像之间的等光程性 F: MAX ? MIN ? CON. :
3. “物” “像”的定义 物
实物 虚物 实像 虚像 未经光学系统变换的发散同心光束的心,称为实物. 未经光学系统变换的发散同心光束的心,称为实物. 光学系统变换的发散同心光束的心 未经光学系统变换的会聚同心光束的心 称为虚物. 光学系统变换的会聚同心光束的心, 未经光学系统变换的会聚同心光束的心,称为虚物. 光学系统变换后的会聚同心光束的心,称为实像. 经光学系统变换后的会聚同心光束的心,称为实像. 光学系统变换后的发散同心光束的心,称为虚像. 经光学系统变换后的发散同心光束的心,称为虚像.
第2章:近轴光学
[PP'] = [PP']
P-E-P' P-O-P'
n(DG+GE)=n'OK
(2-3)
n(DG+GE)=n'OK
h
GE = 1 ch2
2
z = 1 ch2 2
EE' = h DG = − 1 h2
2l
n(DG+GE) = 1 nh2 (c − 1) = 1 nh2 (1 − 1) (2-4)
2
l 2 rl
些情况下用它计算分析更为方便。
n(1 − 1) = n '(1 − 1 )
rl
r l'
物空间 像空间
它是一个不变量,几何光学中称它为阿贝(Abbe)不变量
A = n(1 − 1) = n '(1 − 1 )
(2-9)
rl
r l'
n(1 − 1) = n '(1 − 1 )
rl
r l'
nh(1 − 1) = n 'h(1 − 1 )
rl
r l'
y ' = nl ' = nu y n'l n'u'
像高与物高之比为单个近轴球面 的横向放大率,有时也称垂轴放 大率,用希腊字母β表示,即:
β
=
y' y
=
nu n 'u '
(2-12)
§2.3.2 轴向放大率
若物平面沿光轴方向移
动一微小距离δl,则像
平面沿光轴方向移动一
微小距离δl'。定义δl'与
入射光线 法线 反射光线
锐角 光轴Æ光线Æ法线 顺正逆负
几何光学的近轴理论
p2 s2 4r(s r) sin2
2
2
p p n(s r) n(s r)
p2 s2 4r(s r) sin2
2 p2 s2 4r(s r) sin2
2
s 2 4r(s r) sin 2 s2 4r(s r) sin 2
4. 物像之间的等光程性
物点Q与像点Q‘之间的光程总是平稳 的,即不管光线经何路径,凡是由Q通过 同样的光学系统到达Q’的光线,都是等 光程的。
五.几何光学定律成立的条件
1. 光学系统的尺度远大于光波的波长。 2. 介质是均匀和各向同性的。 3. 光强不是很大。
§1.2 近轴光在单球面上的成像
n2 (s r)2 2
2 n2 (s r)2
s2
n2 (s r)2
s2 n2 (s r)2
4r sin2
Hale Waihona Puke 2[n
2
(
s2 s
r)2
s2 ] n2 (s r)2
Φ不同,s’不同,即从Q点发出的同心光束不能保持同心性
欲使折射光线保持同心性,必须满足近
/cui/ 课程成绩构成: 考试:60 作业:30(迟交超过1周者,拒收!) 论文:10(自选题目,内容不限,但要符合
科技论文的格式)
Lagrange-Helmhotz恒等式
V y ns y ns
对光线的角放大率为
n
p
u
r
i
p
u
Q
Od r
C1
Q
s
s
1.轴上物点成像
从Q点发出的光线QM折射后变为MQ’
第四讲(近轴光学系统成像)

符号规则是人为规定的, 一经定下,就要严格遵 守,只有这样才能导出 正确结果
1、 平面镜、棱镜系统
1. 平面反射镜
图 1 单个平面镜成像(实物成虚像)
图 2 单个平面镜成像(虚物成实像)
如果射向平面反射镜的是一会聚同心光束, 即物点是一
个虚物点,如图1所示,则当光束经平面镜反射后成一实像点。 不管物和像是虚还是实,相对于平面反射镜来说,物和像 始终是对称的。由于其对称性,如果物体为左手坐标系O-xyz, 其像的大小与物相同, 但却是右手坐标系 O ′- x ′ y ′ z ′, 如图2所示,这种物像不一致的像, 叫做“镜像”或“非一致 像”。如果物体为左手坐标系,而像仍为左手坐标系,则这样
将(1)式和(3)式代入(2)式得
sin U n' sin U ' n
所以有
n' cosU ' L' L n cosU
(5)
(1)、 (2)、(3)和(5)式即为平面折射的基本公式,由此就能够
确定任意一条光线经过平面折射后的光路。由公式可见,对于 一个折射平面来说,L′也是U角的函数, 亦即由光轴上同一物
正,反之为负,图中δ >0。由图 8 有
i i2
' i
i1 i i2 i
' 1
' 2
两式相加有
由折射定律有
' i1 i2
sin i1 n sin i1'
' sin i2 n sin i2
将以上两式相减并进行变换可得
则有
1 1 ' ' sin (i1 i2 ) cos (i1 i2 ) 2 2 1 ' 1 ' n sin (i1 i2 ) cos (i1 i2 ) 2 2 1 1 ' n sin cos (i1 i2 ) 1 2 2 sin ( ) 1 2 ' cos (i1 i2 ) 2
4.几何光学讲解
4.3.2 孔径光栏、入瞳和出瞳
物面中心点 A经系统成像于 A‘,其成像光束受限制的最小的圆 为 P,称为“孔径光栏”
P经系统前部的像为 P‘,称为入瞳,经后部的像为 P“,称为出瞳, 显然所有通过孔径光栏的光线必定都通过入瞳和出瞳。入瞳和出瞳互 为物像关系。
对于边缘的物点 B,通过入瞳的光线可能不能完全通过孔径光 栏和出瞳,称为有“渐晕”(见下文讨论),但对于一个设计得较好 的光学系统,渐晕不应该很大。
远心光路的一个用途是控制光束粗细,以适应光学元件的大小(如用在 有双折射滤光器的光路);另一个用途是当存在失焦时,像点的中心距(A"-
B")将不会改变,因此适合某些测量仪器。
4.4 近轴光路和理想光路的计算公式
4.4.1 同轴光路、近轴光路和理想光路
同轴光路是一种应用最广的光学系统,望远镜系统多属于同轴光 路。
实际的同轴光路计算要用三角函数。但如将孔径角和视场角均限 制得很小时,角度的正弦值或正切值可以用弧度值代替,于是光路计 算就大为简化,这样的光路称为“近轴光路”。
近轴光路对于光路的方案设计、外部参数计算(如焦距、截距、 像的高度、放大率、组合光学系统参数等)非常有利。
至于实际光路对于近轴光路在计算结果上的差异则可以归为光学 设计的"像差修正"的程度。
对于由多圈子镜组合起来的大型主镜,除中间一块子镜外,多数子 镜的对称轴与理论曲面的旋转轴是不重合的,称为“偏轴”曲面。
天文望远镜反射式光路常见的曲面及其组成的系 统
4.3 视场和孔径
如将光学系统看成一块没有厚度的透镜,则很容易区分“视场” 和“孔径”的不同概念。其区别在于:视场是从“镜头中心”出发向 观测物张开的角度,它表示可以观测的范围;而孔径是从物面(或像 面)上的一点出发向“镜头”张开的角度,它表示成像光束的粗细 (即反映光能量的集中程度)。
第1章几何光学2(光学系统的近轴成像)_630501433

7
4.理想成像: 对任何一个物点成像后仍是一个点 即同心光束到同心光束
5.理想光学系统(光具组): 能达到理想成像的光学系统 即 使任何同心光束保持同心性的光具组
8
只有平面镜可做到理想成像 其他系统在一定限制下可接近理想成像
6.像差:如果同心光束的像不成一点, 这种情况就称系统有像差。 消像差是光学成像过程中的艰巨任务 我们主要介绍理想(或近理想)成像
n
n’
42
例1 如图所示,xx’是空气中薄透镜的光轴,光 线1’是光线1射于透镜L后的出射光线。试用 作图法求出光线2入射透镜后的出射光线2’
1
1
x
2
x
43
解:
1
1
x
2
x
2
焦平面 ①平行光交于焦点上 ②通过光心光线方向不变 焦平面的重要性
第1章结束 44
凹面镜 成实像:
45
凹面镜成虚像:
n2 n2 n2 n2 s2 s2 r2
s s1 s s2
s1 s2
n1 n2
d 0薄
n2 n1 n2 n1 n2 n2 s s r1 r2
33
s s f
s s f
物方焦点焦距 像方焦点焦距
A
s
s
②牛顿公式 从焦点算起的像距,引入 x 和 x
s f x
s f x
得
x x f f
24
5)反射球面傍轴成像公式
n n
1 1 2 s s r
B y A
C
A F
B
P
-r
-f -s
高斯光学
高斯光学又称近轴光学,是几何光学中研究共轴光学系统近轴区成像规律的一个分支。
1841年德国科学家C.F.高斯在其著作中阐明了有关理论。
基本概念共轴光学系统由透镜、反射镜等光学元件组成的系统,其中所有的折射面和反射面都是旋转对称面,并有一个共同的对称轴,称为光轴。
一般常见的共轴光学系统中折射面和反射面都是球面(平面当作半径无穷大的球面看待),通过所有球面的球心的直线即光轴。
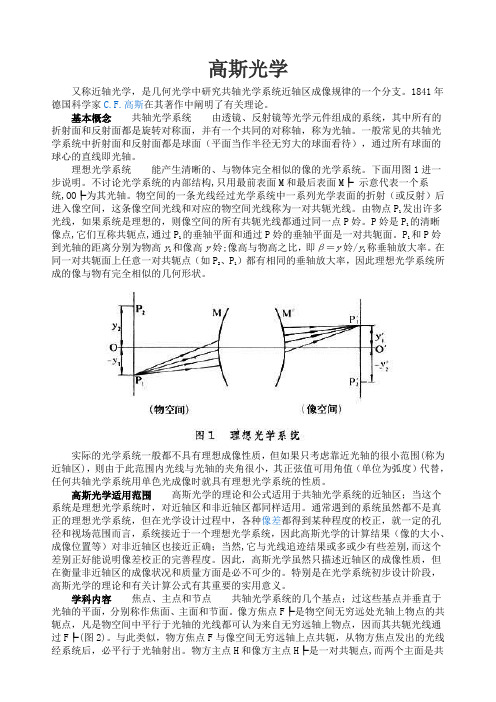
理想光学系统能产生清晰的、与物体完全相似的像的光学系统。
下面用图1进一步说明。
不讨论光学系统的内部结构,只用最前表面M和最后表面M┡示意代表一个系统,OO ┡为其光轴。
物空间的一条光线经过光学系统中一系列光学表面的折射(或反射)后进入像空间,这条像空间光线和对应的物空间光线称为一对共轭光线。
由物点P1发出许多光线,如果系统是理想的,则像空间的所有共轭光线都通过同一点P姈。
P姈是P1的清晰像点,它们互称共轭点,通过P1的垂轴平面和通过P姈的垂轴平面是一对共轭面。
P1和P姈到光轴的距离分别为物高y1和像高y姈;像高与物高之比,即β=y姈/y1称垂轴放大率。
在同一对共轭面上任意一对共轭点(如P2、P1)都有相同的垂轴放大率,因此理想光学系统所成的像与物有完全相似的几何形状。
实际的光学系统一般都不具有理想成像性质,但如果只考虑靠近光轴的很小范围(称为近轴区),则由于此范围内光线与光轴的夹角很小,其正弦值可用角值(单位为弧度)代替,任何共轴光学系统用单色光成像时就具有理想光学系统的性质。
高斯光学适用范围高斯光学的理论和公式适用于共轴光学系统的近轴区;当这个系统是理想光学系统时,对近轴区和非近轴区都同样适用。
通常遇到的系统虽然都不是真正的理想光学系统,但在光学设计过程中,各种像差都得到某种程度的校正,就一定的孔径和视场范围而言,系统接近于一个理想光学系统,因此高斯光学的计算结果(像的大小、成像位置等)对非近轴区也接近正确;当然,它与光线追迹结果或多或少有些差别,而这个差别正好能说明像差校正的完善程度。
工作f数和近轴f数-概述说明以及解释
工作f数和近轴f数-概述说明以及解释1.引言1.1 概述概述部分主要介绍工作f数和近轴f数的基本概念和作用。
工作f数和近轴f数是光学系统中常用的两个重要参数,它们与镜头的性能和成像质量密切相关。
首先,工作f数是指在光学系统中,物体到像面的距离与物体到镜头的距离之比。
它是衡量光学系统成像能力的重要指标。
通常来说,工作f 数越小,光学系统的成像能力越强。
较小的工作f数意味着更短的物体到像面的距离,使得成像更加清晰和锐利。
因此,在选择镜头时,较小的工作f数往往是用户追求的目标。
其次,近轴f数是指在光学系统中,镜头在近摄条件下的f数。
在近距离拍摄时,镜头的光学性能通常会发生变化,近轴f数能够更好地描述这一变化。
较小的近轴f数可以提供更大的近摄能力,使得拍摄近距离物体时,画面更为清晰和详细。
因此,对于喜欢进行近距离拍摄的摄影爱好者来说,近轴f数也是一个重要的考虑因素。
总而言之,工作f数和近轴f数是光学系统中重要的指标,它们直接关系到成像质量和拍摄效果。
在选择镜头或者进行近距离拍摄时,我们应该重视这两个参数,并根据实际需求进行选择。
通过对工作f数和近轴f 数的理解和运用,我们可以更好地利用光学设备,拍摄出高质量和令人满意的照片。
1.2 文章结构文章结构部分的内容如下:本文将首先对工作f数和近轴f数的概念进行介绍和解释,然后分别讨论工作f数和近轴f数的重要要点。
接着,将总结工作f数和近轴f数的主要内容。
在文章的引言部分,我们将概述本文的主题和研究对象,以及解释为什么工作f数和近轴f数是重要的问题。
在正文部分,我们将分别探讨工作f数和近轴f数的要点。
其中,工作f数要点1将介绍关于工作f数定义和计算方法的重要知识,并阐述工作f数在特定领域中的应用。
工作f 数要点2将进一步展开,探讨工作f数的影响因素和优化方法,以帮助读者更好地理解和运用工作f数。
接下来,我们将转向近轴f数的讨论。
近轴f数要点1将详细解释近轴f数的概念和意义,并介绍近轴f数在光学系统中的应用和衡量方法。
应用光学23近轴范围成像综述资料.

0.19198 0.38389 1/1.5163 1/1.5163
0.12661 10 0.04875
0.25318 10 0.102965
25.9689 10 35.9689 -5 30.9689 11.06815 -7.27365 -1 2.7945
24.59107 10 34.59107 -5 29.59107 22.5751 -14.66568 -2 5.90942
起始角 度 U1
L1 -r1 L1-r1 ÷r1 ×sinU1 sinI1 ×n1/n’1 SinI’1 ×r1 ÷sinu’1 L’1-r1 +r1 L’1 -d1 L2 I1 -I’1 +U1 U’1
1度
2度
第一面
-100 -10 -110 10 -0.01745
-100 -10 -110 10 -0.0349
ki l r ku r
k i' n k i n'
k u' k u k i k i'
l ' r k i' r r i' r
ku
u
由轴上同一物点发出的近轴光线,经过球面折射
以后聚交于轴上同一点
轴上物点用近轴光线成像时,符合理想
2.轴外点 假设B点位在近轴区,当用近轴光线成像时,也符合理想, 像点B’位在B点和球心的连线上(辅助轴上)
而与中间变量 u,u’,i,i’ 无关。可以将公式中的u,u’,i,
i’消去,而把像点位置 直l接' 表示成物点位置l和球面半径r以及
介质折射率n,n’的函数。
l' f (n, n', r, l)
近轴光路计算的另一种形式 上面的近轴光路计算公式, 光线的位置是用光线和光轴的交 点到球面的顶点的距离L,L’以及光线与光轴的夹角u,u’表示的。 在有些情况下,则采用光线与球面的交点到光轴的距离h以 及光线与光轴的夹角u,u'表示比较方便,h的符号规则是: h—以光轴为计算起点到光线在球面的投射点,向上为正,向下
几何光学101:近轴光线追迹计算

Geometrical Optics 101: Paraxial Ray Tracing CalculationsRay tracing is the primary method used by optical engineers to determine optical system performance. Ray tracing is the act of manually tracing a ray of light through a system by calculating the angle ofrefraction/reflection at each surface. This method is extremely useful in systems with many surfaces, where Gaussian and Newtonian imaging equations are unsuitable given the degree of complexity.Today, ray tracing software such as ZEMAX? or CODE V? enableoptical engineers to quickly simulate the performance of very complicated systems. Paraxial ray tracing involves small ray angles and heights. To understand the basic principles of paraxial ray tracing, consider the necessary calculations and ray tracing tables employed in manually tracing rays of light through a system. This will in turn highlight the usefulness of modern computing software.PARAXIAL RAY TRACING STEPS: CALCULATING BFL OF A PCX LENSParaxial ray tracing by hand is typically done with the aid of a ray tracing sheet (Figure 1). The number of optical lens surfaces is indicated horizontally and the key lens parameters vertically. There are also sections to differentiate the marginal and chief ray. Table 1 explains the key optical lens parameters.To illustrate the steps in paraxial ray tracing by hand, consider a plano-convex (PCX) lens. For this example, #49-849 25.4mm Diameter x 50.8mm FL lens is used for simplicity. This particular calculation is used to calculate the back focal length (BFL) of the PCX lens, but it should be noted that ray tracing can be used to calculate a wide variety of system parameters ranging from cardinal points to pupil size and location.Figure 1: Sample Ray Tracing SheetTable 1: Optical Lens Parameters for Ray TracingVariable DescriptionC Curvaturet Thicknessn Index of RefractionΦSurface Powery Ray Heightu Ray AngleStep 1: Enter Known ValuesTo begin, enter the known dimensional values of #49-849 into the ray tracing sheet (Figure 2). Surface 0 is the object plane, Surface 1 is the convex surface of the lens, Surface 2 is the plano surface of the lens, and Surface 3 is the image plane (Figure 3).Remember that the curvature (C) is equivalent to 1 divided by the radius of curvature (R). The first thickness value (t) (25mm in this example) is the distance from the object to the first surface of the lens. This value is arbitrary for incident collimated light (i.e. light parallel to the optical axis of the optical lens). The index of refraction (n) can be approximated as 1 in air and as 1.517 for the N-BK7 substrate of the lens.In Figure 2, the red box is the value to be calculated because itis the distance from the second surface to the point of focus (BFL). The power (Φ) of t he individual surfaces is given by the fourth line and is calculated using Equation 1. Note: A negative sign is added to this line to make further calculations easier. In this example, Surface 1 is the only surface with power as it is the only curved surface in the system.(1)Figure 2: Entering Known Lens Parameter Values into Ray Tracing SheetFigure 3: Surfaces of a Plano-Convex (PCX) LensStep 2: Add a Marginal Ray to the SystemThe next step is to add a marginal ray to the system. Since the PCX lens is spherical with a constant radius of curvature and a collimated input beam is used, the ray height (y) is arbitrary. To simplify calculations, use a height of 1mm.A collimated beam also means the initial ray angle (u) is 0 degrees. In the ray tracing sheet, nu is simply the angle of the ray multipliedby the refractive index of that medium. Both variables are included to make subsequent calculations simpler (Figure 4).Figure 4: Adding a Marginal Ray to the Ray Tracing SheetStep 3: Calculate BFL with Equations and the Ray Tracing Sheet Ray tracing involves two primary equations in addition to the one for calculating power. Equations 2 – 3 are necessary for any ray tracing calculations.(2)(3)where an apostrophe denotes the subsequent surface, angle, thickness, etc. In this example, to find the ray height at Surface 2 (y'), take the ray height at Surface 1 (y) and add it to -0.0197 multiplied by 3.296:(2.1)Performing this for ray angle yields the following value. The entire process is repeated until the ray trace is complete (Figure 5).(3.1)Figure 5: Propagating the Ray through the SystemNow, solve for the BFL by either adjusting the thickness value until the final ray height is 0 (Figure 6) or by backwards calculating the BFL for a ray height of 0. For #49-849, the final BFL value is 47.48mm. This is very close to the 47.50mm listed in the lens' specifications. The difference is attributed to the rounding error of using an index of refraction of 1.517 instead of a slightly more accurate value that was used when the lens was initially designed.Figure 6: Calculating Back Focal Length of a Plano-Convex (PCX) Lens using a Ray Tracing SheetDECIPHERING A TWO LENS RAY TRACING SHEETTo completely understand a ray tracing sheet, consider a two lens system consisting of a double-concave (DCV) lens, an iris, and a double-convex (DCX) lens (Figures 7 - 8). To learn more about DCV and DCX lenses, please read Understanding Optical Lens Geometries.Figure 7: Double-Concave (DCV) and Double-Convex (DCX) Lens SystemFigure 8: Sample Double-Concave (DCV) and Double-Convex (DCX) Ray Tracing SystemThe aperture stop is the limiting aperture and defines how muchlight is allowed through the system. The aperture stop can be an optical lens surface or an iris, but it is always a physical surface. The entrance pupil is the image of the aperture stop when it is imaged through the preceding lens elements into object space. The exit pupil is the image of the aperture stop when it is imaged through the following lens elements into image space.In an optical system, the aperture stop and the pupils are used to define two very important rays. The chief ray is one that begins at the edge of the object and goes through the center of the entrance pupil,exit pupil, and the stop (in other words, it has a height (?) of 0 at those locations). The chief ray, therefore, defines the size of the object and image and the locations of the pupils.The marginal ray of an optical system begins on-axis at the object plane. This ray encounters the edge of the pupils and stops and crosses the axis at the object and image points. The marginal ray, therefore, defines the location of the object and image and the sizes of the pupils.Aperture Stop LocationIf the location of the aperture stop is unknown, a trial ray, known as the pseudo marginal ray, must be propagated through the system. Foran object not at infinity, this ray must begin at the axial position of the object and can have an arbitrary incident angle. For an object at infinity, the ray can begin at an arbitrary height, but must have an incident angle of 0°. Once this is accomplished, the aperture stop is simply the surface that has the smallest CA/yp value, where CA is the surface clear aperture and yp is the height of the pseudo marginal rayat that surface.After locating the aperture stop, the pseudo marginal ray can be scaled appropriately to obtain the actual marginal ray (remember the marginal ray should touch the edge of the aperture stop). Once the size and location of the aperture stop is known, the marginal ray height is equal to the radius of the stop and the chief ray height is zero at that location. Paraxial ray tracing can then be carried out in both theforward and the reverse directions from those points. When doing ray tracing in reverse, Equations 4 – 5 are useful. Note the similarities to Equations 2 – 3.(4)(5)Vignetting AnalysisOnce the location and size of the aperture stop is known, use vignetting analysis to see which surfaces will vignette, or cause rays to be blocked. Vignetting analysis is accomplished by taking the clear aperture at every surface and dividing it by two. That value is then compared to the heights of the chief and marginal rays at that surface (Equation 6). Equation 6 can be easily reordered to Equation 7. If Equation 7 is true, the surface does not vignette.(6)(7)Notice in the preceding DCV and DCX example how Surface 3 is the aperture stop where the CA/(|? |+|y|) value is the smallest among all surfaces. Also, none of the surfaces vignette because all values are greater than or equal to 2.Object/Image Size and LocationObject (Surface 0)● Size is 10mm in diameter (twice the chief ray height at Surface0)● Location is 5mm in front of the first lens (the first thickness value)Image (Surface 6)● Size is 18.2554mm in diameter (twice the final chief ray height)● Location is 115.4897mm behind the final lens surface (the last thickness value)It is important to note that the Surface 0 chief ray height is positive while the Surface 6 chief ray height is negative. This indicates that the image is inverted.。
第2章:近轴光学_897107460

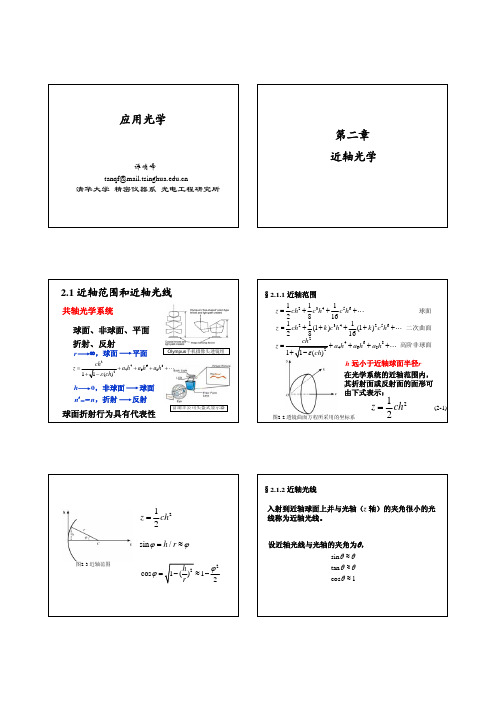
光学工程基础几何光学谭峭峰tanqf@清华大学精仪系光电工程研究所第二章近轴光学Olympus手机摄像头透镜组图2-1一个普通照相镜头的结构子午面透镜曲面方程所采用的坐标系图2-3 近轴范围§2.1.2 近轴光线入射到近轴球面上并与光轴(z 轴)的夹角很小的光线称为近轴光线。
设近轴光线与光轴的夹角为θ,≈sinθθtanθθ≈θ≈cos1§2.1.3 近轴光学的符号规则及名词术语图2-4近轴光线各参量(坐标)正负的标注u:物方孔径角、l:物方截距u':像方孔径角、l':像方截距正负号规定(1). 线段:轴向线段与数学坐标兼容,以近轴球面顶点为原点,左方线段为负、右方线段为正;垂轴线段也与数学坐标兼容,即光轴上方的线段为正,光轴下方的线段为负;(2). 球面半径:与数学坐标兼容,以球面顶点为原点,球心在顶点右边者取正值,球心在顶点左边者取负值;(3). 角度:角度以锐角度量,其符号规则与数学坐标不同。
孔径角以光轴起算转向光线,顺时针旋转取正值(如图2-4所示的像方孔径角u '),逆时针旋转取负值(如图2-4所示的物方孔径角u );光线的入射角和折射角则以光线起算转向法线,顺时针旋转为正值,逆时针旋转取负值;光轴与法线的夹角,由光轴转向法线,顺时针为正,逆时针为负。
锐角光轴Æ光线Æ法线顺正逆负入射光线反射光线折射光线介质1介质2法线I−I ′I ′′2.2 单个近轴球面的性质图2-5 由费马原理到近轴成像P-E-P'[PP']PE 'EP'n n =+P-O-P'[PP']PO 'OP'n n =+=(2-2)PD=PO EP'=KP'P-E-P'P-O-P'[PP'][PP']=(DG+GE)='OK n n (2-3)(DG+GE)=n 212z ch =h1111()'()'nh n h r l r l −=−(h n r 1(n r1)u(2-11)2.3 单个近轴球面成像的放大率图2-6 近轴范围内轴外物点的成像''y l r y r l−−=−1111()'()'A n n r l r l =−=−y y(2-13)表示,即:1求导:'l l δδ'l l δαδ=(2-16)与物之比就确定了,''u l u l =2.4 近轴球面系统中的近轴光线追迹实际的光学系统往往是由多个折(反)射面串联在一起组成的,而且各个折(反)射面的对称轴是共同的,即共轴光轴系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于想的虚实问题的一些考虑。是不是根据放大率来获得像的虚实?
1.第20张ppt中关于取最大值的说法利用椭圆的2a来解释。
2。第22张,利用费马原理可以解释光学定律
3.26张,利用高斯公式来解决
4.32张,利用高斯公式
5.33,求折射率的一种方法,
问题,如何证明是最小的?二阶求导?
6.68中的约定4,球面半径的正负。
7,74为什么物方焦平面和像方焦平面有很多性质。
原因在于,
他们是过焦点的平面,在近轴近似的情况下,可以完全当做是焦点的性质,比如说平行光线经过折射以后,汇聚在像方焦平面,
其中就会出现一些特殊的光线,比如说,过焦点的光线,完全未偏折。
即,平行光线总会在焦平面汇聚
在焦平面上发射的光线也会平行出射
其实,本质就是近轴近似
76什么叫做共轭光线?
80关于面镜的性质
但是,我们该如何理解利用放大率来理解这个问题?
81利用反射球面的性质,即放大率。可以发现,若实物成像,若成实像,则必为倒立!
103对于负镜,像方焦点在物方空间;物方焦点在像方空间
104物方平行光汇聚在像方焦平面(光线指向凹面镜的心)
105物方平行光汇聚在像方焦平面(光线指向物方焦点)