拖拉机自动换挡神经网络控制系统的研究
拖拉机电控机械式自动变速器电控系统设计研究
拖拉机电控机械式自动变速器电控系统设计研究拖拉机电控机械式自动变速器电控系统设计研究摘要:拖拉机是农业机械中的重要组成部分,而自动变速器又是拖拉机的核心部件之一。
本文通过对拖拉机电控机械式自动变速器电控系统进行设计研究,以提升拖拉机的工作效率和操作便利性。
1. 引言随着农业机械化的不断进步,拖拉机作为农业生产中的主力军,其性能和功能要求也不断提高。
自动变速器作为拖拉机传动系统的核心部件,其效率和可靠性直接影响着拖拉机的工作质量和效率。
因此,设计一套高效、可靠的电控机械式自动变速器电控系统对于提升拖拉机的工作效率和操作便利性至关重要。
2. 变速器电控系统的基本原理拖拉机自动变速器电控系统主要由变速器传感器、控制电路、执行机构和显示装置等组成。
其中,变速器传感器通过获取拖拉机车速、油门开度和制动踏板等参数的信号,并将其转化成电信号。
控制电路接收来自传感器的信号,根据预先设定的控制策略,发出指令给执行机构,实现变速器的自动换挡和换程。
显示装置用于显示拖拉机的车速、挡位和工作状态等信息。
3. 系统设计与开发3.1 变速器传感器设计通过安装车速传感器、油门传感器、制动踏板传感器等设备,准确获取拖拉机的车速、油门开度和制动踏板状态等参数,并将其转化成电信号。
传感器的设计要考虑其耐久性和可靠性,以适应恶劣的工作环境。
3.2 控制电路设计控制电路是电控系统的核心部分,其主要功能是接收传感器的信号,并根据预设的控制策略来控制变速器的换挡和换程。
在设计过程中,需要考虑控制电路的稳定性、可靠性和实用性,确保其能够适应各种工作条件和负荷要求。
3.3 执行机构设计执行机构是控制电路的输出部分,主要负责接收电控系统的指令,并通过电动、气动或液压等方式实现变速器的换挡和换程。
执行机构的设计要考虑其快速响应、稳定可靠,以确保变速器能够准确、迅速地实现自动变速。
3.4 显示装置设计显示装置用于显示拖拉机的车速、挡位和工作状态等信息,便于驾驶员实时掌握拖拉机的运行情况。
农业机械自动导航技术研究进展分析
农业机械自动导航技术研究进展分析1. 引言1.1 研究背景农业机械自动导航技术是指利用全球定位系统(GPS)、惯性导航系统(INS)、数字地图等技术,实现农业机械设备在田间作业时自动驾驶、自动导航和路径规划的一种先进技术。
随着农业生产方式的转变和农业机械化水平的提升,自动导航技术在农业生产中的应用也越来越广泛。
在传统的农业生产中,农民需要花费大量时间和人力进行耕种、施肥、除草等作业,而且在作业过程中难免会出现一些误差,影响作物的生长和产量。
而引入自动导航技术后,农业机械设备可以根据预先设定的路径自动行驶,不仅提高了作业效率,减少了人力成本,还能够减少误差,提高作业质量。
尽管自动导航技术在农业生产中表现出许多优势,但仍然存在一些问题亟待解决。
目前自动导航技术在复杂地形条件下的稳定性有待提升,还需要更精准的自动路径规划算法以应对各种复杂的农田情况。
为了更好地推动农业机械自动导航技术的发展,有必要加强对其研究,不断完善技术,提高自动导航设备的精度和稳定性,实现农业生产的智能化和高效化。
【研究背景】1.2 研究目的研究目的是为了深入探讨农业机械自动导航技术的最新发展情况,分析该技术在农业生产中的应用现状和存在的问题,揭示自动导航技术的发展趋势,以及对未来农业机械自动导航技术的发展方向进行展望。
通过本文的研究,旨在为农业生产实践提供指导意义,推动农业机械自动导航技术的创新和应用,提高农业生产效率和质量,实现农业现代化和可持续发展。
1.3 研究意义农业机械自动导航技术的研究意义主要体现在以下几个方面:1. 提高农业生产效率农业机械自动导航技术可以实现农机具的智能化操作,减少了人工操作的需求,提高了生产效率。
农民可以通过这项技术更加精准地管理农田,提高作物的种植密度和质量,从而实现更高的产量。
2. 减少生产成本自动导航技术可以减少人工和机械设备的重复性操作,降低了耕作和种植的成本。
农民可以通过这项技术实现降低劳动力成本、节约燃料费用等好处,从而提高农业生产的经济效益。
农机智能控制系统设计与实现
农机智能控制系统设计与实现智能控制系统在农机行业的应用越来越广泛。
它不仅可以提高农机的智能化水平和工作效率,还可以减少劳动力压力,降低生产成本,并提高生产质量。
本文将重点讨论农机智能控制系统的设计与实现。
首先,农机智能控制系统设计的关键是采集数据和实时监控。
系统应该能够获取农田和农机的关键参数,如土壤湿度、温度、作物生长状态等,并能对农机进行实时监控。
这就需要使用传感器和控制器进行数据采集和信息传输。
其次,农机智能控制系统应该具备自动化控制功能。
在农田作业过程中,农机智能控制系统应该能够自动感应和判断农机的工作状态,并根据作业需求自动调整农机的工作参数。
例如,可以根据土壤湿度自动调整农机的灌溉量,根据作物生长状态自动调整农机的施肥和除草量。
通过自动化控制功能,农机智能控制系统能够提高农田作业的效率和准确性。
另外,农机智能控制系统还应该具备智能决策功能。
通过对大量农田和农机数据的收集和分析,系统可以根据不同作物和农田地区的特点制定智能决策方案。
例如,系统可以根据历史农田数据和气象预报数据预测未来的灌溉和施肥需求,并自动调整农机的作业计划。
智能决策功能能够提高农机作业的效果,并减少资源的浪费。
此外,农机智能控制系统还应该具备远程监控和远程操作功能。
通过互联网和无线通信技术,用户可以通过手机或电脑实时监控农机的工作状态,并进行远程操作。
例如,如果农机在工作过程中出现故障,用户可以通过远程操作进行维修,以减少停机时间。
在农机智能控制系统的实现过程中,还需要考虑安全性和可靠性。
农机智能控制系统涉及到大量的农机和农田数据,因此系统的安全性非常重要。
数据应该进行加密和备份,以防止泄露和丢失。
同时,系统还应该具备良好的容错机制,以避免单点故障对整个农田作业的影响。
农机智能控制系统的设计和实现需要多个领域的专业知识和技术的支持。
例如,需要农业专家的农业知识,需要电子工程师的嵌入式系统设计经验,需要软件工程师的软件开发技术等等。
拖拉机论文
基于BP神经网络的自动换挡规律人工神经网络(Artificial Neural Network,即ANN),是20世纪80年代以来人工智能领域兴起的研究热点,它从信息处理角度对人脑神经元网络进行抽象,建立某种简单模型,按不同的连接方式组成不同的网络[2]。
神经网络自被提出以来,人们一直希望它能完成人脑神经系统功能的模拟,通过模拟人脑神经元之间联接,利用人工神经元相互连接构成网络以实现学习知识、存储知识、知识联想和模式识别等智能化的信息处理功能。
遗传算法是建立在达尔文( Darwin)的生物进化论和孟德尔( Mendel)的遗传学说基础上的算法,它模拟自然选择和自然遗传过程中发生的繁殖、交叉和基因突变现象,在每次迭代中都保留一组候选解,并按某种指标从解群中选取较优的个体,利用遗传算子对这些个体进行组合,产生新一代的候选解群,重复此过程,直到满足某种收敛指标为止。
与传统的启发式优化搜索算法相比,遗传算法的主要本质特征在于群体搜索策略和简单的遗传算子。
遗传算法从初始种群出发,多个点同时进行搜索,即可以快速地缩小搜索空间,又不会所有点均落入快速下降陷阱致使算法陷入局部最优解;同时,遗传算法具有着内在的并行性,可以很容易地利用分布式计算,加快求解速度。
正是因为以上优点,遗传算法优化BP神经网络也成为近些年的研究热点之一。
本文以神经网络理论、运筹学﹑系统工程﹑概率数理统计﹑高等数学和MATLAB计算机仿真技术为理论基础。
采用定性与定量分析相结合、计算机仿真运算、比较研究、实证分析等方法。
现在很多工程车辆中都运用神经算法技术优化车辆的自动换挡,比如吉林大学机械学院提出了基于多尺度小波神经网络的工程车辆换挡策略[3],能够及时准确控制变速箱自动调节换挡,不仅提高了工程车辆的工作效率,而且对节约能源具有非常重要的意义。
拖拉机要实现自动换挡功能,主要有以下两方面的要求:一是根据当前拖拉机运行状态辨别最佳挡位,本文采用三参数换挡控制规律;二是根据神经网络控制器发出的最佳挡位信息,控制电磁阀按预定规律运动,以实现换挡操作。
拖拉机AMT系统换挡控制策略研究
ale
condition.The
control
strategy of shifting process is
designed.The
established and simulation analysis is done for the shifting process of
AMT.It turns out that witII using the control strategy.the effect of the shifting process is satisfactory. process;control strategy;simulation
Engineering,Henan University of Science&Technology,Luoyang City,Henan Province 471003,China;3.Technology Department,First Tractor Company
Limited,Luoyang City,Henan
眄:薪
.厅藩翮.陌蠢翮
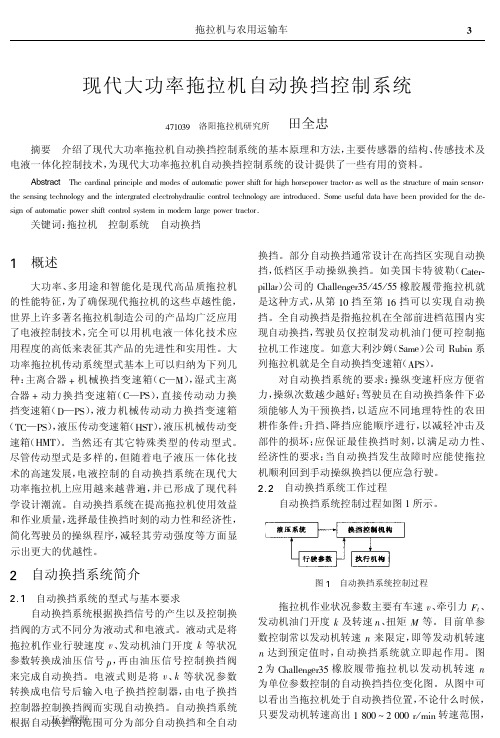
图1拖拉机AMT系统工作原理
i
i液压回路系统
离合器传递的转矩;6——单个犁铧宽度;z0_一犁
铧个数;匕一在标准速度时农机具的单位阻力; s——速度增加时的牵引阻力增长系数:∞。——发
动机角速度;cc,。——变速器输入轴角速度。 对上述三个评价指标进行分析,换挡时间是 拖拉机换挡品质的综合评价,决定动力中断时间 的长短,应尽量缩短换挡时间;冲击度是拖拉机运 行平稳程度的量化评价标准,在离合器分离瞬间 为负值,即冲击方向与拖拉机行驶方向相反,在离 合器接合过程中冲击度为正值。以冲击度的国家 标准为限制条件,控制离合器接合速度;滑摩功是 离合器使用寿命的评价指标,较小的滑摩功有利 于延长离合器的使用寿命。为了减小滑摩功需要 缩短离合器接合时间。但同时会导致冲击度的增 加。另外,离合器主、从动盘转速差的减小也有利 于减小换挡过程产生的滑摩功。因此,为了对这3 个指标进行协调,需要对发动机、离合器及换挡机 构进行综合控制。
工程机械模糊神经网络挡位控制试验研究
( i n Unv ri J l ie st i y)
Abs t c ta t
A t o fs itd cs o a e n t e t c n l g f u z e r ln t r ( NN )h s b e me h d o h f e ii n b s d o h e h o o y o z y n u a e wo k F f a e n p t f r r n t e p p r u o wa d i h a e .wh c a e a p id t e e mi e wh c e r i r n m iso o ih c n h p l o d t r n e ih g a n a t a s s i n b x s o l b s i e a c r i g o h o — i o e a i n f o sr c i n e il . Th r lv n h u d e h f d c o d n t t e n st t e p r to o c n t u t v h c e o e ee a t sm u a i e e p rme t n t t u t r f F i Itv x e i n s o he s r c u e o NN n h h f i g d cso r a re u n a a d t e s i n e ii n we e c r id o t o t t s — e c ih wa q i p d wi h a p we r i fZ 0 wh e a e .Th x e i e t l e u t e t b n h wh c s e u p e t o rt a n o L5 e l o d r l ee p r m n a s l r
自动换挡系统的研究资料

假如我是你,我就能像爱自己一样爱你,我是你吗,是的,所以爱你就是爱自己。
基于行驶环境识别的汽车自动换挡系统研究针对通常自动变速器由于对行驶环境不适应而出现的一些问题。
如坡道行驶中的换挡循环问题,转弯时的频繁换挡问题以及湿滑路况下的打滑问题等,建立了一种基于行驶环境识别的多模式汽车自动换挡系统。
这个系统能够利用通常自动变速器上的传感器信号,自动识别汽车的当前行驶环境,并根据外界于亍驶环境的变化选择相应的换挡规律,从而解决了通常自动变速器在特定行驶环境下出现的问题,提高了自动变速器的整体性能。
这种环境自适应的控制方法将是今后汽车控制系统的发展方向。
虽然通常的自动变速器已成为一种成熟的商业产品,但它仅以车速和节气门开度作为换挡控制参数,根据平路行驶时确定的最佳燃油经济性或最佳动力性换挡规律进行换挡。
这种未考虑行驶环境信息,仅基于汽车行驶状态的换挡系统虽然在通常的行驶环境中具有令人满意的性能,但在一些特定的行驶环境中却可能产生一些问题,如:坡道行驶时的换挡循环问题,转弯时的频繁换挡问题以及湿滑路况下的打滑问题等。
为了解决通常自动变速器在特定行驶环境下出现的这些问题.提高自动变速器的整体性能,本文研究了利用通常自动变速器的传感器信号,在尽量不增加自动变速系统硬件的基础上进行行驶环境识别的方法,提出了行驶环境识别系统的体系结构,建立了一种基于该环境识别系统的多模式自动换挡系统。
并进行了基于行驶环境识别汽车的行驶环境差别很大,不仅路面类型复杂多样,有上坡、下坡、转弯等,同样的路面类型条件下,因交通流状况(车多、人多),路面状况(湿滑、泥泞)的差异,对换挡的要求也有很大的差别。
当路面状况良好,且周围行人、车辆稀少时,汽车可以迅疾飞奔。
而在同样的路面条件下,当周围人、车较多时汽车不得不缓慢行驶。
为了便于自动换挡系统对千亍驶环境的识别,本文建立了一种递阶的行驶环境识别体系,底层由路面附着的识别,行驶区域的识别,坡道、弯道识别3个平行的部分组成,进干亍实时识别,上层根据底层的识别结果,进行相应的推理和决策,确定与当前行驶环境相适应的汽车换挡规律。
基于神经网络的自动变速器换档控制系统
经 网 络 为 非线 性系 统 的建 模 和 控 制 开辟 了新 的途 径 。
应用 神经 网络处理 自动变速器换档的建模 问题,主要用到 神经网络 的非线性映射 能力 ,一般采用多层前向神经 网络 。其 中误差反向传播算法 ( akpo a ain P算法 )因其简单 b c —rp g t ,B o 易行、计算量小、并行性强,成 为多层前向神经 网络训练 的首
()最佳动力性 换档 1 最佳动 力性换档 规律是使 汽车 的牵 引力得 到最 充分 的利 用,发动 机功率获得最大的发挥来进行换档 的规律 。为了不损
失 动 力性 ,在 换 档 点 应 该保 证 车 速 和 加 速度 相 同 。在 不 同油 门
开度 下各档加速度与车速的关系 曲线中,某一油门开度下相邻 档的 曲线交 点就是确保最佳动力性的换档点。如果在高油 门或 较低 油门时两 曲线没有交点,这 时采用低档该油门下 的最高车 速为换档 点。把各油 门开度 下的最佳换档点连接起来 ,便得到 最佳换档动力特性 曲线。图 1 示为汽车 前进档牵引特性图。 所
开度和加速度 。虽然使用的控制参数越多越能达到较好的 自动 换档效果,但会使换档系统变复杂 ,因而成本较 高。本系统采
用 两 参 数 控制 。
换档 过程 是发动机、离合器 以及变速箱综 合控 制的过程 , 要求三者协调动作来减少冲击、降低 噪声和保证离合器使用寿
命 ,从 而 提 高换 档 品质 。 利用 神 经 网络 (e r e r,N 控 制 工程 车辆 自动 变速 nuant k N) l wo 器换 档 ,主 要 是 利用 驾驶 员 的 经验 及 其 它 专 家 知识 形 成 的换 档
是 非 常方 便 的 。神 经 网 络控 制 自动 换 档 在 实 时学 习和 自动 模 式 识 别 方 面有 极 强 的 优 势 。但 是神 经 网络 的 使 用需 要 有 样本 数 据
履带式拖拉机的自动导航系统研究与优化

履带式拖拉机的自动导航系统研究与优化引言随着科技的不断发展和农业生产的现代化,农业机械化已经成为提高农业生产效率和质量的重要手段之一。
在众多农业机械设备中,拖拉机不仅是农田耕作的重要工具,而且逐渐发展为自动化生产的重要载体。
为了提高拖拉机的工作效率和减少劳动力成本,自动导航系统成为了研究的热点之一。
本文将重点研究和优化履带式拖拉机的自动导航系统。
一、履带式拖拉机自动导航系统的基本原理1.1 概述履带式拖拉机自动导航系统是指利用先进的技术手段,使拖拉机能够在农田中自动执行指定的作业任务。
通过全球定位系统(GPS)、惯性导航系统和电子控制单元等技术结合,实现拖拉机的精确定位和路径规划。
1.2 系统组成履带式拖拉机自动导航系统一般由以下组成部分构成:1)全球定位系统(GPS):通过卫星信号定位拖拉机的准确位置。
2)惯性导航系统:结合陀螺仪和加速度计等传感器,实现对拖拉机的姿态和运动状态的监测。
3)电子控制单元(ECU):负责接收传感器数据、算法处理和产生控制信号。
4)人机交互界面:实现对自动导航系统的设置和操作。
1.3 工作原理履带式拖拉机自动导航系统的工作原理主要包括以下几个步骤:1)定位与导航规划:通过GPS收集拖拉机的位置信息,并根据预设的任务要求规划适当的导航路径。
2)传感器数据采集:通过惯性导航系统和其他传感器,实时采集拖拉机的位置、姿态和环境信息。
3)数据处理与算法优化:借助电子控制单元,对传感器数据进行处理和分析,优化路径规划和导航算法。
4)控制指令传递:通过电子控制单元生成的控制信号,控制拖拉机的转向、速度和作业等动作。
5)人机交互与监控:通过人机交互界面,实现对自动导航系统的设置、调整和监控。
二、履带式拖拉机自动导航系统的优化研究2.1 系统精度优化拖拉机自动导航系统的精度直接影响着农业生产的质量和效益。
为了提高系统的精度,可以从以下几个方面进行优化:1)传感器校准:通过对传感器进行定期校准,减少误差和漂移,提高测量和导航的精度。
农业机械自动化控制系统的研究
农业机械自动化控制系统的研究随着社会的不断发展,人们对于生活条件和劳动方式的要求越来越高,特别是在农业生产领域,农民朋友们迫切需要引进一些现代化技术来提高农业生产效率,减轻农民朋友们的劳动强度,保证农产品的品质和数量,变相提高我国农业的地位以及农民收入。
因此,推广农业机械化是现代农业改革的首要任务。
在现代化的农业生产过程中,农业机械自动化控制系统起到了至关重要的作用。
农业机械自动化控制系统指的是将计算机、机械、传感器、执行器、仪表等设备和技术融合在一起,通过专业的控制系统,对农机进行精密的控制和管理。
在这样的背景下,农业机械自动化控制系统逐渐成为了研究热点。
其研究意义主要体现在以下几个方面:1.提高农业生产效率农业机械自动化控制系统有助于提高农业生产效率,减少劳动力资源消耗,降低生产成本,从而更好地满足人们对食品的需求。
2.确保农产品的品质和数量采用农业机械自动化控制系统,它不仅可以高效地完成耕作、播种等工作,还可以通过监测土壤含水量、养分含量等,自动调整机器的工作参数,确保农产品的品质和数量。
3.促进农业可持续发展采用农业机械自动化控制系统,可以减少化肥、农药、烟斗等耗材的消耗,减少环境污染和资源浪费,从而促进农业可持续发展。
农业机械自动化控制系统可分为机械部分和电气部分两大部分。
机械部分包括各种传动与执行器件,如传动齿轮、传动链条、液压顺序阀、液压缸体等,电气部分包括电气控制部分和控制策略部分。
电气控制部分包括中心控制器、操作面板、仪表等,控制策略部分包括逻辑控制与数值控制两个部分。
逻辑控制部分包括计数控制、速度控制、位置控制等,数值控制部分则包括模拟控制、数字控制等。
农业机械自动化控制系统具有多样化强、智能化、自动化等特点,其核心部分是聚集控制技术、分散控制技术以及工程信息技术等不同领域的技术,因此对于农业机械自动化控制系统的研究也面临着很大的挑战和难度。
然而,随着自动化技术的不断成熟和发展,农业机械自动化控制系统能够不断完善和提高,应用范围也不断扩大。
现代大功率拖拉机自动换挡控制系统
电液一体化控制技术, 为现代大功率拖拉机自动换挡控制系统的设计提供了一些有用的资料。
7() 4)/4./9 7)*(/3039: +/- 7() ./7),9,+7)- )0)*7,3(:-,+60.* *3/7,30 7)*(/3039: +,) ./7,3-6*)-; <32) 64)560 -+7+ (+=) >))/ 1,3=.-)- 53, 7() -)? 4.9/ 35 +6732+7.* 138), 4(.57 *3/7,30 4:47)2 ./ 23-),/ 0+,9) 138), 7,+*73,;
!
概述
大功率、 多用途和智能化是现代高品质拖拉机
的性能特征, 为了确保现代拖拉机的这些卓越性能, 世界上许多著名拖拉机制造公司的产品均广泛应用 了电液控制技术, 完全可以用机电液一体化技术应 用程度的高低来表征其产品的先进性和实用性。大 功率拖拉机传动系统型式基本上可以归纳为下列几 ( A—B) , 湿式主离 种: 主离合器 @ 机械换挡变速箱 合器 @ 动力换挡变速箱 ( A— C<) , 直接传动动力换 挡变速箱 ( D— C<) , 液力机械传动动力换挡变速箱 ( ’A— C<) , 液压传动变速箱 ( E<’) , 液压机械传动变 。当然还有其它特殊类型的传动型式。 速箱 (EB’) 尽管传动型式是多样的, 但随着电子液压一体化技 术的高速发展, 电液控制的自动换挡系统在现代大 功率拖拉机上应用越来越普遍, 并已形成了现代科 学设计潮流。自动换挡系统在提高拖拉机使用效益 和作业质量, 选择最佳换挡时刻的动力性和经济性, 简化驾驶员的操纵程序, 减轻其劳动强度等方面显 示出更大的优越性。
基于神经网络的拖拉机自动导航系统

0 引 言
在2 0世纪 , 息 技术 、 感器 技术 、 制技 术 与 网 信 传 控 络技 术 等快 速 发展 , 农 业 生 产 带 入 了 自动 化 发 展 时 将 代 。农用 车 辆 自动 导 航 技 术 作 为 农 业 生 产 自动 化 和
网络 能 够 逼 近 任 意 的 非 线 性 函 数 。 神 经 网络 的 这 种 本 质上 的非 线 性 可 以用 来 映 射 车 辆 与 路 径 之 间 的偏 差 和车 辆转 角 之 间 的 关 系 。 因此 , 文 选 用 神 经 网络 本 控制 方 法设 计 车 辆转 向控 制器 , 图 l 示 。 如 所
1 2 学 习算 法 .
B 算法具有收敛速度慢 和局 部极值等缺点 。学 P
习算 法 采用 带 有惯 性 项 的 B P算 法 ,降 低 了 网络 对 于 误 差 曲面 局 部 细 节 的 敏感 性 。 有 效 抑 制 网络 陷 于 局 部 极 小 的 网络训 练 过 程 如下 :
基金项 目:西 北农 林 科 技 大学 “ 年学 术 骨 干 支 持 计划 ” 助 项 目 青 资
实 际航 向角 0
智能化 的一项 重要 研究 内容 , 到人们 的普遍关 注 。 受
国外 对农 用 车 辆 自动 导 航 技 术 的 研 究 相 对 较 早 , 美 国、 日本 和 欧洲 一些 国 家 对 此 项 技 术 进 行 了深 入 的研 究 ¨ J并应 用 于 实 际生产 中 。 国内多 为 理论 性 研 究 , , 实 验研 究相 对 较少 J 。根 据导 航 系统 中使 用传 感 器 的不 同 , 目前 常 用 的导 航 方 式 主 要 有 G S导 航 、 觉 P 视
图 1 转 向控 制 系统
拖拉机自动换挡控制系统设计
拖拉机自动换挡控制系统设计王少辉,师帅兵(西北农林科技大学机械与电子工程学院,陕西杨凌712100)摘要:介绍了拖拉机自动换挡控制系统的结构组成和功能应用,并进行了软硬件设计。
硬件系统以AT89C52单片机为核心,采用C51高级语言进行软件开发。
该控制系统能够采集数据信号,得到拖拉机当前运行状态,根据得到的换挡规律进行计算,从而确定最佳换挡点,控制换挡油缸进行自动换挡,极大地改善了拖拉机燃油经济性、生产效率以及舒适性。
关键词:拖拉机;自动换挡;控制系统;单片机中图分类号:S219.032.9文献标识码:A文章编号:1003-188X(2013)08-0221-030引言目前,国内外自动换挡控制系统在汽车上的应用已经十分普遍,各种技术趋于成熟。
在美国、日本等发达国家,自动变速控制系统的装车率已经达到或超过80%。
自动换挡控制系统操纵自动变速器自由、准确地执行自动换挡,从而实现自动变速,使汽车的动力性、燃油经济性、操纵性以及其他性能得到大幅度改善。
虽然自动换挡技术在汽车上已大量应用,但对于拖拉机仍处于起步阶段,发展及应用尚不成熟。
目前,国内拖拉机大多采用传统手动机械式变速箱,如果拖拉机以低速大牵引力作业,在需要换挡时就必须中断动力,这意味着要使拖拉机停车和重新起步,会影响机组的生产效率。
另外,拖拉机与汽车相比,不仅在结构制造方面不同,而且工况复杂多变,分为道路运输和田间作业,导致换挡复杂。
因此,合理借鉴汽车自动换挡控制技术,着重解决拖拉机变速箱自动换挡控制技术,减轻驾驶员的劳动强度是大力推广农业机械必须考虑的问题,由此能够达到提高拖拉机燃油经济性、生产效率的目的。
1控制系统组成及功能拖拉机自动换挡控制系统由硬件部分和软件部分组成。
硬件部分由前向通道电路、单片机电路和后收稿日期:2012-08-08基金项目:陕西省自然科学基础研究计划项目(2009JM3018)作者简介:王少辉(1987-),男,陕西宝鸡人,硕士研究生,(E-mail)wangshaohui.05@163.com。
履带式拖拉机的智能控制系统设计与优化
履带式拖拉机的智能控制系统设计与优化履带式拖拉机是一种广泛应用于农业生产的重要机械设备,它具有较强的越野能力和承载能力,为农民提供了卓越的助力。
随着科技的不断发展,智能控制系统的设计和优化变得越来越重要,它可以提高拖拉机的自动化程度、节约能源和提高生产效率。
一、设计目标在进行履带式拖拉机智能控制系统的设计时,我们需要明确设计目标,从而为后续的优化和改进提供明确的方向。
1. 自动驾驶功能:设计一个能够自动驾驶的拖拉机控制系统,使其能够在特定场景下自主驾驶,提高作业效率和安全性。
2. 能源节约:通过优化控制算法,减少不必要的能耗,降低燃料消耗量,实现能源的有效利用。
3. 效率提升:提高拖拉机的工作效率,减少人力和时间成本,使农民能够更高效地完成农业生产任务。
二、智能控制系统设计1. 传感器系统:在拖拉机上安装必要的传感器,如激光雷达、红外线传感器、GPS导航等,实时感知拖拉机周围的环境和当前位置。
2. 数据采集和处理:将传感器采集到的数据进行处理和分析,提取有用的信息,为后续的控制和决策提供基础。
3. 控制算法:基于传感器数据和预设的目标,设计合适的控制算法,实现拖拉机的自动驾驶和自动化作业。
4. 通信系统:与农场管理系统或中央控制中心进行信息交互,实现远程监控和指令传递。
5. 用户界面:设计一个友好的用户界面,供操作人员进行监控和操作,提供实时的工作状态和报警信息。
三、智能控制系统优化1. 路径规划:通过对地理数据的分析和优化算法的运用,确定最佳的路径规划方案,保证拖拉机能够高效地在农田中行驶,避免重复作业和跨越农作物。
2. 能源优化:通过改进控制算法、减少不必要的能耗和优化发动机的动力输出,实现能源的最优利用。
例如,根据土地条件和重量负荷,动态调整发动机的工作状态,减少能源浪费。
3. 故障诊断和维护:将传感器数据与故障数据库进行比对,利用人工智能技术进行故障诊断,提前预知拖拉机可能出现的故障,并给出故障排除的建议。
农业工程中的农机智能化控制系统
农业工程中的农机智能化控制系统随着科技的快速发展,农业工程中的农机智能化控制系统也越来越受到重视。
这一系统的出现,不仅使农机的操作更加智能化和高效化,还能够提高农田的生产力和农民的收益。
本文将探讨农机智能化控制系统的发展现状、应用场景以及未来的发展方向。
农机智能化控制系统是指利用先进的传感器、控制器和通信技术,对农机进行智能化控制和管理的系统。
通过实时监测和分析农田的环境和作物的生长状况,系统可以自动调整农机的工作参数,实现精确施肥、灌溉和植保等操作。
与传统的手工操作相比,农机智能化控制系统能够提高农机的作业效率和精度,减少资源的浪费和环境的污染。
目前,农机智能化控制系统已经在农业生产的各个环节得到了广泛应用。
在播种阶段,系统可以根据土壤的湿度、温度和养分含量等信息,自动调整播种机的行进速度和种子的投放量,实现精确播种。
在施肥和灌溉阶段,系统可以根据作物的需水需肥量和土壤的水分含量,自动调整施肥机和灌溉设备的工作参数,实现精确施肥和灌溉。
在植保阶段,系统可以根据作物的生长状况和病虫害的发生情况,自动调整喷雾器和杀虫灯的工作时间和强度,实现精确植保。
农机智能化控制系统的应用不仅提高了农机的作业效率和精度,还能够降低农业生产的成本和风险。
传统的农机作业需要大量的人力和物力投入,而农机智能化控制系统可以实现自动化作业,减少了人力的需求。
此外,系统可以实时监测农田的环境和作物的生长状况,及时发现并处理问题,减少了因人为疏忽或错误导致的损失。
因此,农机智能化控制系统不仅提高了农田的生产力,还能够提高农民的收益和生活质量。
然而,农机智能化控制系统在实际应用中还存在一些挑战和问题。
首先,系统的成本较高,需要大量的投资和技术支持。
其次,系统的稳定性和可靠性还有待提高,需要进一步优化和改进。
此外,由于农业生产的复杂性和多样性,系统的适用范围和精度也需要不断提高。
因此,农机智能化控制系统的发展仍然面临一些困难和挑战。
拖拉机AMT换挡规律及实施技术研究

拖拉机AMT换挡规律及实施技术研究第4期2005年8月拖拉机与农用运输车Tractor&FarmTransporterl7拖拉机AMT换挡规律及实施技术研究水高爱云付主木郭志军(1.河南科技大学洛阳4710032.东南大学自动控制系南京210096)摘要:分析了影响拖拉机挡位变化的各种因素,建立了基于挡位选择与主要影响因素之间的拖拉机电控机械式变速器自动换挡数学模型,并对该数学模型中所需参数的实施技术进行了研究.最后,由试验数据,采用计算机编程计算,对泰山25拖拉机的换挡规律进行了实例分析.关键词:拖拉机机械式自动变速装置换挡规律实施技术ShiftScheduleandActualizingTechniquesofTractors AutomaticMechanicaITransmissionGaoAiyun,FuZhumu,GuoZhijun(1.CollegeofV ehicle&MotivePowerEngineering,HenanUniversityofScience&am p;Technology,Luoyang471003.China;2.DepartmentofAutomaticControl,SoutheastUniversity,N蚰jing210096,China) Abstract~Thispaperfirstanalysesallkindsoftheinfluencingwithfactorsfortractorsautomat icmechanicaltrans—mission(AMT).Then,onthebasisofinvestigationontherelationsbetweengearpositionsele ctionandmaininfluencingfe.ctors.theshiftmathematicmodeloftractorsAMTshiftscheduleisconstructedandtheactu alizingtechniquesarestudied.Finally,usingtestingdataandcomputerprogram,thepartoftheshiftcurve8ofTaishan-25trac toraredrawn.Keywords:Tractors,Automaticmechanicaltransmission,Shiftschedule,Implementtechn ology1引言机械式变速器由于其效率高,成本低,结构简单等优点,获得广泛应用.对传统的手动机械式变速器进行自动化改造,保留绝大部分原总成部件,只将其中手动操作系统改为自动控制机构,不仅具有原齿轮变速器效率高,成本低的优点,且结构简单,生产继承性好,改造的投入费用少,而且可以提高机械式传动车辆的技术含量,改善其使用性能,增强其国际竞争力,因而成为我国研究的热点….机械式自动变速器(AMT)的研究始于汽车,机械式变速器的自动化从开始至今已有二十多年的历史.在国外,汽车的AMT已进入产品化和实用化阶段;在国内,吉林大学,北京理工大学,重庆医疗机械工业公司等在汽车和工程机械自动变速器的研究方面取得了积极成果...他们研究的换挡规律都是基于汽车理论.笔考认为,拖拉机有一套不同于汽车的完整的理论体系,自动换挡模型的建立,应从拖拉机变速器的自身特点出发,才能更好符合河南省高校杰出科研人才创新工程项目(2002KYCX010)其实际工况.因此本文将从影响拖拉机挡位变化的因素出发,对其换挡规律进行研究,并对其实施技术进行分析,最后给出了一个实例分析.换挡规律是自动换挡控制系统的核心.拖拉机的换挡规律是指根据拖拉机运行工况变速器应处于的挡位,即应升挡,降挡还是保持当前挡位,也就是挡位随控制参数变化的规律.换挡规律的研究是拖拉机AMT实现的核心问题,确定什么样的换挡规律.将直接影响拖拉机的动力性和经济性,因此,研究拖拉机换挡规律有极其重要的理论意义和现实意义. 2拖拉机AMT模型图1为一种典型齿轮机械式传动的拖拉机模型,它由柴油机,离合器,机械式齿轮变速箱等组成. 本文所建立的换挡规律正是基于此模型.3影响挡位变化的因素影响拖拉机挡位变化的因素主要包括:拖拉机工况因素,路面环境因素和驾驶员意图.l8拖拉机与农用运输车第4期2005年8月一轮图1拖拉机模型示惹图3.1拖拉机工况因素拖拉机工况因素是指拖拉机在作业时,表示其工作状态的特征参数.拖拉机工况因素主要包括车速,调速器供油拉杆位移,驱动轮滑转率,柴油机转速,车辆负荷和变速器挡位等.1)车速拖拉机的行驶速度间接反映外界的负载情况,同一油门和挡位下,车速越高说明外界阻力越小,故可提高挡位,以经济性运行.2)调速器供油拉杆位移俗称的"油门"实际用于控制柴油机转速的范围.驾驶员通过扳动操纵臂只是改变调速弹簧的预压力,也即改变了柴油机工作转速;而柴油机的供油量则由调速器根据外界负荷的变化自动地进行调节.当载荷较大时,弹簧的预压力克服调速器离心力的轴向分力,推动供油拉杆移动,柴油机的供油量增加;反之,调速器离心力的轴向分力克服弹簧预压力,推动供油拉杆反向移动,减小供油量.故供油拉杆位移反映了柴油机阻力矩的变化,是换挡的主要控制参数之一.3)驱动轮滑转率驱动轮滑转率直接反映拖拉机的速度损失,即拖拉机的动力性.滑转率应是一个控制参数,滑转率超过允许值时,则不宜在此土壤条件下工作,应适当减小负荷.滑转率小,表示速度损失小,在此条件下,可考虑升挡运行或加大负荷.4)柴油机转速n在换挡过程中,主,从动齿轮和离合器主,从动盘都需要用到柴油机转速.柴油机转速随负荷的变化而波动,在其它条件不变的情况下,柴油机转速变化能在很大程度上反映外界信息,转速升高,说明外界阻力变小,可以升挡运行.在一定挡位和滑转率下,柴油机转速可转换为车速.5)车辆负荷当车辆负荷越大时,行车阻力越大,这时换挡应以动力性为主,故应适当增加低挡的范围;当车辆负荷小时,行车阻力也小,这时换挡应以经济性为主, 故应适当以高挡运行.6)变速器挡位换挡主要是为了满足拖拉机的动力性和经济性的要求而改变传动比的过程,变速器输出轴的转矩与挡位传动比成正比,越大,越大,故当前挡位是评价是否换挡的主要依据之一.3.2路面环境因素拖拉机在作业时,工况,路况较为复杂,必须对换挡规律进行适当的处理,以降低换挡次数.路面环境因素主要包括坡道,弯道和路面松软状况.1)坡道坡道运行时挡位的选择与平路不同.持续的上坡或下坡路况,对挡位选择的影响可在油门,车速关系中给以考虑.但由下坡到上坡(或相反)转换时及平路与坡道的转换时挡位选择与一般情况是有区别的;另外在长的较陡下坡情况下,有时要利用变速器低挡时柴油机的制动作用.为了使AMT挡位选择更加合理从而避免不必要的换挡,有必要识别这种情况.2)弯道弯道分为运输路面(一般为公路)弯道和田间9O.与180.弯道,主要考虑以目前挡位运行是否安全,是否需要降挡运行,尤其要防止频繁换挡.3)松软路面拖拉机在松软路面作业时,地表松软,潮湿,受力不均衡,滑转严重,因此换挡时必须考虑滑转的影响,适当增加低挡的使用范围,以满足拖拉机作业的动力性要求.3.3驾驶员意图变速是使拖拉机适应运行负载状态,提高车辆动力性,经济性的重要手段,所以变速器控制系统应该对驾驶员意图进行识别.驾驶拖拉机时,驾驶员心态很复杂,而且同样情况体现出的操作也相差很大.较明显影响换挡的操纵意图是超车,冲坡,减速和停车.通过分析可知,影响拖拉机挡位变化的主要因素是拖拉机车速,驱动轮滑转率和柴油机调速器供油拉杆位移.其中供油拉杆位移能反映柴油机状况和驾驶员操作意图;滑转率是反映环境因素和拖拉机工况的重要参数;车速也是反映拖拉机工况的重要参数.因此,拖拉机自动换挡数学模型将选用这三个重要参数作为控制参数.4自动换挡的数学模型4.1驱动轮滑转率模型驱动力系数.是一个无因次参数,它表示驱动力F.与驱动轮上实际的垂直载荷的比值.利用历年来洛阳拖拉机研究所等许多单位所作的牵引试验资料中的滑转率曲线,可得出下式高爱云等:拖拉机AMT换挡规律及实施技术研究l9 hT+㈩大量试验资料的统计证明,以下形式的函数可较好地拟合拖拉机滑转率曲线q=(1一e一'):?1nI_m"一q—≥:(7)0142129.r~?(1一)式(6)和式(7)就是拖拉机AMT自动换挡数学模型.(2一口)5实施技术(2一b)5.1拖拉机状态参量的测量式中'为特征滑转率;为最大驱动轮动载利用系数;为车辆驱动轮滑转率;h,为牵引点到地面距离(1TI);为拖拉机轴距(1TI);为驱动轮的静载荷,对轮式车辆,=,G为拖拉机使用L重量(N),a为后轮中心到重心的距离(m).4.2柴油机能量方程拖拉机的理论牵引特性曲线是假定供油拉杆处于最大位移所得,但是拖拉机行驶的大部分时间里, 柴油机都工作在部分负荷状态下,因此在试验数据不足的情况下,必须建立柴油机转矩,转速和拉杆位移之间的关系式,即柴油机的能量方程.根据文献[9],采用四系数形式的多项式表示全速式调速器能量方程为:b1+b2?n+b3?z+b4?n(3)式中为柴油机转矩(N?m);为柴油机转速(r/rain);z为调速器供油拉杆位移(mm);b,b, b,,b为柴油机能量方程拟合系数.4.3车辆理论计算基本公式∞】为了推导驱动力与车速的关系,还需以下几个基本公式71=叼:cir,(4),q.:0.377(1一)(5)'式中叼为传动系效率;为某挡总传动比;为驱动轮动力半径(m);C=叼?~,可以认为基本上是一个常数;为实际车速(km/h);n为柴油机转速(r/rain).4.4AMT自动换挡数学模型由式(1),(2一a),(2一b)可推出为:——(1一e一')L(6)由式(3),(4)和(5)可导出Fq与的关系式半+0377r~1.+.?(一.拖拉机自动换挡数学模型中的状态参量在AMT的ECU中都是被转换为脉冲数字量形式送人微机定nO/计数器接口进行测量的.脉冲的频率与这些速度成比例,微机通过测频或测周期得到对应的速度.在左右驱动轮轴上各安装一个转矩,转数传感器分别测量左右驱动轮转矩的时间信号和转速脉冲信号;在离合器轴上测量柴油机的转矩的时间信号;在柴油机飞轮上安装转数传感器测定柴油机的转速脉冲信号;在柴油机调速器齿条上安装位移传感器测量供油拉杆位移的时间信号,测量原理如图2所示.柴油机转矩传感器柴油机齿条位移传感器数IlIl蓄t乜池传感器Il转数传感器lI转数传感器fI……动态电阻应变f冲磁带信蛩汜求机ll,波器交流220V稳压器发电机图2参数测量系统原理图1)调速器供油拉杆位移的测量将位移传感器固结在柴油机调速器齿条上测量调速泵供油拉杆位移的时问信号,测量原理参见图2所示.2)理论车速的测量理论车速可以通过变速器输出轴转速测取.通过变速箱输出轴上的齿轮和磁电式转数传感器,把输出轴转速转换为脉冲.当采用测频法时理论车速为(8一.)TMi一..n\u—u/其中为理论车速(km/h);M为T(ms)时间内计数脉冲个数;T为采样时间(ms);M.为变速箱输出轴齿轮齿数;i.为动力输出轴与驱动轮间的传动比.当采用测周期时,每脉冲周期为AT(ms),理论车速为(8-b)Mi一△?c?0./3)实际车速和滑转率的测量换挡规律中的滑转率必须动态实时测取,现介拖拉机与农用运输车第4期2005年8月绍一种实时测取方法:修正法.修正法的基本原理如图2.需要在左右从动轮上安装转数传感器,其测量方法与理论车速的测量方法类似.驱动轮上的理论车速按式(8一a)或按式(8一b)计算,从动轮用来计算实际车速,从动轮转速/1.的测量方法与驱动轮转速/1.的测量方法相同. 通过从动轮转速/1.的测量值,可计算出实际车速oO通过五轮仪或牵引试验等方法测量滑转率,已有一套完整的方法,滑转率,理论车速和实际车速存在如下关系:(9)利用式(9),可以计算拖拉机某个挂钩牵引力下的滑转率.但由于实际车速的测量没有考虑从动轮的滑移,使得实际车速的测量值比实际值小,计算得到的滑转率比实际滑转率大,因此必须进行修正.修正方法应从各种土壤条件不同工况下滑移的统计特性得到.5.2实例分析根据所建立拖拉机AMT的数学模型和实施技术,以泰山25拖拉机为例,参考文献[11]对模型的求解方法,采用计算机编程,根据运算结果,作出拖拉机部分换挡规律曲线如图3.图中实线表示升挡,虚线表示降挡,"34"表示三挡升四挡,"43"表示四挡降三挡.741u/(km?h)a8=5%时b8=7%时图3泰山25拖拉机部分换挡规律由文献[9]可得柴油机能量方程拟合系数:b=77.171933132,b2=0.061714879,b3=一13,978241 942,b=一0.O0o019780.计算所需基本参数如下:驱动轮工作参数:一=0.94,'=10,5%.拖拉机总体参数:G=l5430N,hr=0.295m,L=1.7m,口=0.66lm,=9430.45N,r/=0.9,r.=0.495m.取前四挡传动比:3=ll0.58,i=69.73,5=45.97.6结论1)影响拖拉机电控机械式自动变速器挡位变化的主要因素是车速,驱动轮滑转率和柴油机调速器供油拉杆位移.2)根据影响挡位变化的主要因素,建立了拖拉机电控机械式变速器自动换挡数学模型.该模型在考虑常用参数调速器供油拉杆位移和车速的情况下,将更能反映动力特性的滑转率纳入控制参数之中,从而使所建立的换挡规律更加符合拖拉机的实际工况.3)对拖拉机自动换挡模型的实施技术进行了研究,并通过实例分析,验证所建立的自动换挡模型是合理的.拖拉机电控机械式自动变速器换挡规律及实施技术的研究,丰富了拖拉机自动变速理论.但由于拖拉机作业工况的复杂性和多样性,因而在实际应用中,针对具体工况对该模型进行智能化修正将是后续研究工作的重点.参考文献1葛安林.车辆自动变速理论与设计.北京:机械工业出版社, 1993.153~2132钟绍华.电控机械式自动变速器的起步与换挡过程的研究:[硕士学位论文].长春:吉林工业大学.19923NobortlHaRofi,ToshikazuOshidari,KazuhiroTakato6,eta1.Anew five-speednissanautomatictransmissionforpassengercars.SAEPa—per900551.1990,717~7234KlugerMA,Lo"gDM.Anoverviewofcurrentautomatic,manual andcontinuouslyvariabletransmissioneffieieneiesandtheirprojected futureimprovements,SAEPaper1999-01—1259,1999:1~65HiroshiY oshimura.AtsushlHirako.Automatedmechanicaltransmis- sloncontrols.SAEPaper861052.1986:494~5046李君,张建武,冯金芝.等.电控机械式自动变速器的发展,现状和展望.汽车技术,2000(3):1~37朱红军.葛安琳,张广成,等,电子控制机械式自动变速器.汽车电器.2000(1):11~138张文春,方在华.理论牵引特性曲线数学模型及计算机作图程序,拖拉机,1987(5):23~289张剑,方在华,杨铁皂.等,拖拉机柴油机能量方程的特征数据拟合法.洛阳工学院,1998,19(2):28~311O翁家昌,赵铨.拖拉机理论.北京:中国农业机械出版社,198811高爱云,付主木,张文春,拖拉机AMT换挡规律求解方法研究. 农业机械.2005.36(3):12~14f!卜1(编辑-'N~I),收修改稿日期:2005—05—09/'…'。
履带式拖拉机的智能化控制技术研究
履带式拖拉机的智能化控制技术研究随着科技的不断发展,农业领域也在加速实现智能化。
作为农业机械化的重要组成部分,履带式拖拉机在农业生产中扮演着关键角色。
因此,对履带式拖拉机的智能化控制技术进行研究和改进,对于提高农业生产效率和降低人力成本具有重要意义。
一、智能化控制技术的意义传统的履带式拖拉机由驾驶员操纵,其操作依赖于经验与技巧。
然而,在现代化农业生产中,农民和农机操作员更加注重高效率和精确性。
智能化控制技术的应用可以消除人为因素的干扰,保证操作的准确性和一致性。
智能化控制技术可以使拖拉机实现自动化操作,提高工作效率,减少人力成本。
通过传感器和控制系统的配合,履带式拖拉机可以自主感知环境,根据所获取的信息进行智能决策,实现自主导航和自动驾驶,减轻人工操作负担。
此外,智能化控制技术还可以提高拖拉机的安全性。
通过实时监测拖拉机的状态和环境,并能够及时做出反应,减少事故的发生,保护农民和农机操作员的安全。
二、智能化控制技术的关键要素1. 传感器技术:传感器是智能化控制技术的重要组成部分。
通过安装在拖拉机上的各种传感器,如测距传感器、陀螺仪、倾角传感器等,可以实时获取拖拉机周围的环境信息,如地形、障碍物、速度、姿态等。
这些数据为拖拉机的智能化决策提供了重要的基础。
2. 控制系统:智能化控制技术离不开一个高效的控制系统。
控制系统由计算机、软件和硬件构成,负责获取和处理传感器数据,进行逻辑判断,并输出相应的控制信号,实现拖拉机的智能化操作。
控制系统需要具备高性能的处理能力和快速的响应速度,以确保拖拉机的操作准确性和稳定性。
3. 自主导航技术:自主导航技术是智能化控制技术的关键技术之一。
借助全球定位系统(GPS)和惯性导航系统,拖拉机可以实现精确定位和航迹规划。
通过预先设置农田地图和路径规划算法,拖拉机可以自主导航,在没有驾驶员操控的情况下按照预定的路径行驶,并根据环境变化做出相应的调整。
4. 人机交互技术:智能化控制技术要求拖拉机与操作员之间能够进行高效的沟通和交互。
拖拉机多段液压机械无级变速器的神经网络rPID控制
拖拉机多段液压机械无级变速器的神经网络rPID控制张明柱;郝晓阳;尹玉鑫【期刊名称】《河南理工大学学报(自然科学版)》【年(卷),期】2017(036)006【摘要】As a farmland machinery,the tractor's speed is an important factor affecting the effects of operation. In order to improve the dynamic performance and driving stability of the multi-range hydro-mechanical continu-ously variable transmission (HMCVT) in tractor,and to guarantee the speed in accordance with the target speed,it is needed to enhance the quality of tractor driving comfort and work. By taking the HMCVT of the 400 horsepower wheeled tractor as the research object, this paper studies the neural network PID control for the multi-range HMCVT in tractor. According to the vehicle speed alteration,the neural network PID controller is adopted to adjust the PID parameters online. The tractor transmission system model and neural network PID controller model are established based on Matlab/Simulink platform. The neural network PID controller simula-tion on the tractor dynamics model and comparison with the PID control simulation were carried out. The results showed that the new model has the stronger adaptive ability and robustness of the neural network PID control of tractor. It laid a theoretical foundation for the multirange HMCVT tractor automation control.%为改善配备有多段液压机械无级变速器(hydro-mechanical continuously variable transmis-sion,HMCVT)拖拉机的动态响应性能和行驶平稳性,保证拖拉机按照目标车速稳定行驶,提高拖拉机的驾驶舒适性和作业质量,以东方红400马力轮式拖拉机为研究对象,对多段HMCVT拖拉机行驶车速进行神经网络PID控制研究.根据实际车速变化实时调节PID控制器的参数,实现对目标车速的控制.利用Matlab/Simulink仿真建模软件建立神经网络PID控制器和拖拉机传动系统模型,对多段HMCVT拖拉机进行神经网络PID控制仿真并与常规PID控制进行比较可知,神经网络PID控制器对车速控制具有更好的自适应能力和鲁棒性.研究结果可为多段HMCVT拖拉机的自动化操作控制提供参考.【总页数】6页(P93-98)【作者】张明柱;郝晓阳;尹玉鑫【作者单位】河南科技大学机电工程学院,河南洛阳471003;河南科技大学机电工程学院,河南洛阳471003;河南科技大学机电工程学院,河南洛阳471003【正文语种】中文【中图分类】TP393【相关文献】1.农用拖拉机用多段液压机械无级变速器的设计 [J], 李洪刚2.拖拉机多段液压机械无级变速器的动力学建模及仿真 [J], 张明柱;周志立;徐立友;李言3.拖拉机液压机械无级变速器加速换段过程动力学仿真 [J], 王光明;张晓辉;朱思洪;张海军;马然;太健健4.农业拖拉机用多段液压机械无级变速器设计 [J], 张明柱;周志立;徐立友;李言5.拖拉机多段液压机械无级变速器的传动特性分析 [J], 郭蕊;张明柱;陈晨;李忱因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 拖拉 机 自动换挡神经 网络控制原理
拖 拉机 要实 现 自动 换 挡 功 能 , 要 有 以 下 两方 面 主
的要求 : 一是 根据 当前 拖拉 机 运行 状 态 辨别 最 佳挡 位 , 本文 采用 两参数 换 挡 控 制 规 律 ( 车速 和柴 油 机 调 速器 供 油拉杆 位移 z ; 是 根据 神 经 网络控 制 器 发 出 的最 )二 佳挡 位信 息 , PC 7 4 由 I1C 2单 片机 发 出控 制 指 令 , 制 控 电磁 阀按 预定 规 律 运 动 , 以实 现 换 挡 操 作 。换 挡神 经 网络控 制 系统示 意 图见 图 1所示 。
通 过学 习熟 练驾驶 员 的经 验 和专 家知 识 获得 自动换 挡
维普资讯
20 0 8年 6月
农 机 化 研 究
第 6期
规律; 二是 依据 拖拉 机 自动 变 速理 论 , 前设 定 一 定 约 提 束 条件 , 照 某 种 目标 函数 通 过 优 化 获 得 自动 换 挡 功
0 弓 言 I
拖 拉机是农 业 机 械 化 的 主要 动力 装 备 , 与 配 套 可
农 机具 组成 完 整 的作 业 机 组 。拖 拉 机 在 田间作 业 时 ,
4
换 主要是 为 了满 足拖 拉 机 动力 性 和经 济 性
的要求 。
1 5 负荷 .
工作环境复杂且恶劣 , 外界负荷不断波动 , 驾驶员需频
对换挡规律进行适 当处理 , 以降低 换挡次数 。对于 田
间作 业 , 面环境 主要 是土 壤 的松 软状 况 。 路
拖 拉机 的行 驶 速 度 可 以间接 地 反 映土 壤 的状 况 。 在 同一 油 门和挡 位 下 , 车速 越 高 明外 界 阻力 越 小 , , 说
土 壤越 松 软 。 因此 , 提 高 挡 位 , 便 拖 拉 机 经 济 运 可 以
基金项 目:河北农业大学博士基金项 目( 07— 0 9 20 2 0 ) 作者简 介:刘江涛( 9 8一) 男 , 北邢 台人 , 17 , 河 助教 , 士研究 生, E— 硕 (
m i lj n t 20 @ eo .o al i i ga 0 3 yu cm。 )ua o
获 得拖拉 机 自动 换 挡 规 律 一 般 有 两 种 途 径 : 是 一
制和挡位 辨识 原理 。利用 神经 网络 芯 片 ZS 0 6和 PC 7 4 IC 3 I 1 C 2单 片 机 , 立 了径 向基 函数 神 经 网络 ( B N 控 制 建 R F N) 器 。通过 MA L B样 本数 据仿 真表 明 , 控制 器可 以较好 地 实现 挡位 辨识 , 而为 拖拉 机 自动换 挡 的设 计 与研 究提 TA 该 从
—
节 。它 反映 了柴 油 机 工作 状 况 和 驾驶 员 操 作 意 图 , 是 自动换挡 的主要控制 参数 。
1 3 驱动 轮滑转 率 6 .
驱动 轮滑转 率 反 映 了拖 拉 机 速 度 损 失 的大 小 、 环 境 因素 和拖拉 机 工 况 。滑 转 率 超 过 允 许 值 时 , 明拖 说
通过 上述分 析 可 知 , 响 拖 拉 机 换 挡 的 主 要 因 素 影 是 车速和 柴油机 调速 器供 油拉杆 位移 z 。
行 。车 速 是 自动换 挡 的主要控 制参数 。 12 调速 器供 油拉杆 位移 Z . 柴油 机供 油量 由调速 器 根据 外界 负 荷变 化 自动地
进 行调节 , 即在 田间作业 时 , 据土 壤 的 阻力 进行 调 亦 根
节 点数 由 自动换 挡 规 律 所 选 参 数 决 定 , 出结 点 个 数 输 由变 速器 挡位个 数决 定 ( 图 3所示 ) 见 。
拉机 不适 宜在 此 土 壤 条件 下进 行 工作 ;滑 转 率 小 时 ,
径向基函数神经 网
表示 速度 损失小 , 以升挡 运行或加 大负 荷 。 可
收稿 日期 :20 0 7一o 9一l O
车速 l (BN ) 器 R FN 控制
昌律 H H 执
图 1 拖 拉 机 自动 换 挡 神 经 网络 控 制 系 统
荷 小时 , 车 阻力 也 小 , 时换 挡 应 以经 济性 为 主 , 行 这 故
应适 当以高挡运 行 。
1 6 路面 状况 .
实现 自动换挡 具有 重要 意义 。
1 拖拉机换挡影响因素
11 车 速 V .
拖拉 机在 田间作 业 时 , 工况 与 路况 较 为 复杂 , 须 必
供 了理论 依据 。
关键词 :拖拉 机 ;自动换 挡 ;神经 网络 ;PC A ;MA L B I1 7 C 2 TA 中图分类号 :S 1 S 2 2 9; 1 6 文献标识码 : A ‘ 文章编号 :1 0 0 3—18 2 0 0 0 7 0 8 X(0 8)6- 1 4— 3
维普资讯
20 0 8年 6月
农 机 化 研 究
第 6期
拖 拉 机 自动 换 挡 神 经 网 络 控 制 系 统 的 研 究
刘江涛 , 王泽和 , 张立 国, 王
( 河北 农业 大学 机 电工 程学 院 , 河北 保定
摘
龙
0 10 ) 7 0 1
要 : 针 对拖 拉机在 田间作业 的复 杂状况 , 析 了影 响 拖 拉机 换 挡 的 因素 , 绍 了拖 拉 机 自动 换 挡 神经 网 络控 分 介
繁换挡 以满足 整机 的动力 性 要求 , 劳动 强 度较 大 , 且难 以保证行 驶经 济性 。大 功率 和 多挡 位拖 拉 机 的操 纵控
制非常 复杂 , 手动换 挡难 以满足 要求 , 因此 在拖 拉 机 上
当拖 拉机 负荷越 大 时 , 车 阻力 越 大 , 时换 挡 应 行 这
以动力性为主, 故应适 当增加低挡的范 围; 当拖拉机负