振动测试报告表
试验报告

振动环境数据实测与试验剖面设计实验报告试验一正弦振动的环境测量和处理1试验目的:(1)通过本实验连接并掌握正弦机械振动信号测量的基本方法。
(2)应用Matlab编制相关程序,计算正弦信号的峰值、有效值、频率。
2试验原理:振动测试包括两种方式:一是测量机械或结构在工作状态下的振动,如振动位移、速度、加速度、频率和相位等,了解被测对象的振动状态,评定等级和寻找振源,对设备进行监测、分析、诊断和故障预测。
二是机械设备或结构施加某种激励,测量其受迫振动,以便求得被测对象的振动力学参量或动态性能,如固有频率、阻尼、刚度、频率响应和模态等。
振动的幅值、频率和相位时振动的三个基本参数,成为振动三要素。
幅值:幅值是振动强度的标志,它可以用峰值、有效值、平均值等方法来表示。
频率:不同的频率成分反应系统内不同的振源。
通过频谱分析可以确定主要频率成分及其幅值大小,从而寻找振源,采取相应的措施。
压电传感器的力学模型可简化为一个单自由度质量-弹簧系统。
根据压电效应的原理,当晶体上受到振动作用力后,将产生电荷量,该电荷量与作用力成正比,这就是压电传感器完成机电转换的工作原理。
压电式加速度传感器在振动测试领域中应用广泛,可以测量各种环境中的振动量。
实验设备与振动测量实验装置图1所示,将加速度传感器通过配套的磁座吸附在振动实验台底座上,然后将其输出端和数据采集仪的输入端相连,通过USB接口和PC机相连,在通过软件将计算完成的信号数据呈现在显示器上。
图1 实验设备与振动测量实验装置傅里叶变换能将满足一定条件的某个函数表示成三角函数(正弦和/或余弦函数)或者它们的积分的线性组合。
在不同的研究领域,傅里叶变换具有多种不同的变体形式,如连续傅里叶变换和离散傅里叶变换。
最初傅里叶分析是作为热过程的解析分析的工具被提出的。
f(t)满足傅立叶积分定理条件时,下图①式的积分运算称为f(t)的傅立叶变换,②式的积分运算叫做F(ω)的傅立叶逆变换。
振动测试技术分析报告

文件编码:版本:密级:生效日期:页数:页振动测试技术分析报告拟制:__ ___ __ ___ 日期:_ 审核:___________________ 日期:__________ 批准:__ ___ __ ___ 日期:_目录1、目的 (3)2、参考标准 (3)3、术语解释 (4)4、振动测试简介 (9)4.1.振动测试必要性 (9)4.2.振动引起失效模式 (10)5、振动测试项目 (11)6、正弦振动试验 (11)6.1.正弦振动试验目的 (11)6.2.正弦振动应力参数 (11)6.3.正弦振动试验条件 (12)6.4.正弦振动试验标准 (13)7、随机振动试验 (16)7.1.随机振动试验目的 (16)7.2.随机振动应力参数 (16)7.3.随机振动试验条件 (21)7.4.随机振动试验标准 (21)8、振动台简介 (23)8.1.机械式振动台 (23)8.2.电磁式振动台 (24)8.3.液压式振动台 (26)8.4.振动台选取 (28)振动测试技术分析报告1、目的分析振动对产品可靠性的影响,评估导入振动测试的必要性;介绍振动测试的定义、测试方法以及相关标准;为环境可靠性测试体系中振动测试规范的制订提供依据;2、参考标准GB10593.3-90电工电子产品环境参数测量方法振动数据处理和归纳GB10593.1-89电工电子产品环境参数测量方法振动GB05170.14-1985电工电子产品环境试验设备基本参数检定方法振动(正弦)试验用电动振动台GB05170.15-2005-T 电工电子产品环境试验设备基本参数检定方法振动(正弦)试验用液压振动台GB05170.13-2005-T 电工电子产品环境试验设备基本参数检定方法振动(正弦)试验用机械振动台GB02423.56-2006-T 电工电子产品环境试验第2部分:试验方法试验Fh:宽带随机振动(数字控制)和导则GB02423.49-1997-T 电工电子产品环境试验第2部分:试验方法试验Fe:振动-正弦拍频法GB02423.48-1997-T 电工电子产品环境试验第2部分:试验方法试验Ff:振动-时间历程法GB02423.11-1997-T 电工电子产品环境试验第2部分:试验方法试验Fd:宽频带随机振动一般要求GB02423.10-1995-T 电工电子产品环境试验第2部分:试验方法试验Fc和导则:振动(正弦)3、术语解释3.1.通用术语●位移displacement:表征物体或质点相对于某参考系位置变化的矢量。
振动测试作业报告
振动测试技术期末总结学号:班级:建筑与土木工程(1504班)姓名:杨允宁2016年4月27日目录1 振动测试概述 (1)1.1 振动的分类: (1)1.1.1 按自由度分类: (1)1.1.2 按激励类型分类: (1)1.1.3 振动规律分类: (1)1.1.4 按振动方程分类: (1)1.2 振动基本参量表示方法: (2)1.2.1 振幅(u): (2)1.2.2 周期(T)/频率(f): (2)1.2.3 相位( ): (2)1.2.4 临界阻尼(C cr) (2)1.2.5 结构的阻尼系数(c): (2)1.2.6 对数衰减率(δ): (3)1.3 振动测试仪器分类及配套使用: (3)1.3.1 振动测试仪器分类 (3)1.3.2 振动测试仪器配套使用: (4)1.4 窗函数的分类及用途 (5)1.4.1 矩形窗(Rectangular窗): (5)1.4.2 三角窗(Bartlett或Fejer窗): (5)1.4.3 汉宁窗(Hanning窗): (5)1.4.4 海明窗(Hamming窗) (6)1.4.5 高斯窗(Gauss窗) (6)1.5 信号采集及分析过程中出现的问题及解决方法 (7)1.5.1 信号采集和分析过程中出现的问题 (7)1.5.2 解决方法 (7)2 惯性式速度型与加速度型传感器 (8)2.1 惯性式传感器的分类: (8)2.2 常用加速度计传感器的工作原理及力学模型: (8)2.2.1 电动式(磁电式)传感器: (8)2.2.2 压电式传感器: (9)2.3 非惯性传感器: (11)2.3.1 电涡流式传感器: (11)2.3.2 参量型传感器: (11)3 振动特性参数的常用量测方法 (11)3.1 简谐振动频率的量测: (12)3.1.1 李萨(Lissajous)如图形比较法: (12)3.1.2 录波比较法: (12)3.1.3 直接测频法: (12)3.2 机械系统固有频率的测量 (13)3.2.1 自由振动法: (13)3.2.2 强迫振动法: (13)3.3 简谐振幅值测量 (13)3.3.1 指针式电压表直读法: (13)3.3.2 数字式电压表直读法 (13)3.3.3 光学法 (14)3.4 同频简谐振动相位差的测量 (14)3.4.1 示波器测量法 (14)3.4.2 相位计直接测量法 (14)3.5 衰减系数测量 (14)4 振动测试及动载测试实验报告 (15)4.1 振动测试实验报告 (15)4.1.1 测量梁模型一阶振型的数据处理 (15)4.1.2 模态分析 (17)4.2 动应变实验报告 (18)4.2.1 测量梁模型的数据处理 (18)4.2.2 模态分析 (21)5 概念 (21)5.1 功率谱 (21)5.2 相关函数 (22)5.2.1 自相关函数 (23)5.2.2 互相关函数 (23)5.3 相干函数 (24)5.4 传递函数 (24)6 模态分析 (25)6.1 基本概念 (25)6.2 方法分类和理解 (26)6.2.1 频域法 (26)6.2.2 时域法 (26)6.2.3 时频法 (27)1振动测试概述1.1振动的分类:1.1.1按自由度分类:单自由度系统振动(结构只有一个质点体系);多自由度系统振动(结构具有一个以上的质点体系)。
振动测试报告表
序号
测试项目
1
振动
5PCS
3.实验图示:
4.实验数据: 编据 是否 OK 判定
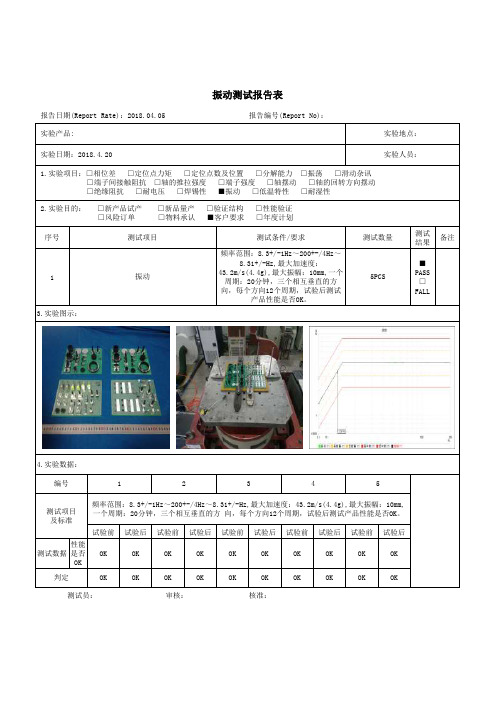
频率范围:8.3+/-1Hz~200+-/4Hz~8.31+/-Hz,最大加速度:43.2m/s(4.4g),最大振幅:10mm, 一个周期:20分钟,三个相互垂直的方 向,每个方向12个周期,试验后测试产品性能是否OK。 试验前 OK OK 试验后 OK OK 试验前 OK OK 审核: 试验后 OK OK 试验前 OK OK 试验后 OK OK 核准: 试验前 OK OK 试验后 OK OK 试验前 OK OK 试验后 OK OK
测试员:
相位差定位点力矩定位点数及位置分解能力振荡滑动杂讯端子间接触阻抗轴的推拉强度端子强度轴摆动轴的回转方向摆动绝缘阻抗耐电压焊锡性振动低温特性2
振动测试报告表
报告日期(Report Rate):2018.04.05 实验产品: 实验日期:2018.4.20 1.实验项目:□相位差 □定位点力矩 □定位点数及位置 □分解能力 □振荡 □滑动杂讯 □端子间接触阻抗 □轴的推拉强度 □端子强度 □轴摆动 □轴的回转方向摆动 □绝缘阻抗 □耐电压 □焊锡性 ■振动 □低温特性 □耐湿性 2.实验目的: □新产品试产 □风险订单 □新品量产 □物料承认 □验证结构 ■客户要求 □性能验证 □年度计划 测试条件/要求 频率范围:8.3+/-1Hz~200+-/4Hz~ 8.31+/-Hz,最大加速度: 43.2m/s(4.4g),最大振幅:10mm,一个 周期:20分钟,三个相互垂直的方 向,每个方向12个周期,试验后测试 产品性能是否OK。 测试数量 测试 结果 ■ PASS □ FALL 备注 报告编号(Report No): 实验地点: 实验人员:
振动时效报告

振动时效报告
报告时间:2021年6月30日
报告内容:
为了能够更加保障振动设备的性能和维护,我们进行了振动时效测试。
测试使用了四台振动设备,分别对其进行了24小时的持续振动测试,并在测试结束后进行了数据分析和报告总结。
测试结果表明,四台设备的振动幅值与振动频率均呈现出时效性变化。
具体而言,设备A在测试前的振动幅值为1.2G,振动频率为50Hz。
而在测试结束后,设备A的振动幅值降低至0.8G,振动频率也有所变动,为48.5Hz。
设备B、C、D的变化趋势与设备A大致相似,只是变化幅度略有不同。
进一步分析数据,我们认为设备的振动时效与运行环境、使用频率、设备质量等因素密切相关。
因此,我们建议对设备进行定期的振动测试,并根据测试结果进行相关设备调整和维护,以确保设备的长期性能和可靠性。
结论:
通过本次振动时效测试,我们得出了设备的振动变化规律和时效性变化趋势。
同时也为我们提供了科学、理性的数据支持,以便更好地维护振动设备的长期性能。
报告人:xxx公司技术部
签名:__________。
振动实验报告讲解
振动实验报告讲解振动与控制系列实验姓名:李⽅⽴学号:201520000111电⼦科技⼤学机械电⼦⼯程学院实验1 简⽀梁强迫振动幅频特性和阻尼的测量⼀、实验⽬的1、学会测量单⾃由度系统强迫振动的幅频特性曲线。
2、学会根据幅频特性曲线确定系统的固有频率f 0和阻尼⽐。
⼆、实验装置框图图3.1表⽰实验装置的框图图3-1 实验装置框图KCX图3-2 单⾃由度系统⼒学模型三、实验原理单⾃由度系统的⼒学模型如图3-2所⽰。
在正弦激振⼒的作⽤下系统作简谐强迫振动,设激振⼒F 的幅值B 、圆频率ωo(频率f=ω/2π),系统的运动微分⽅程式为:扫频信号源动态分析仪计算机系统及分析软件打印机或绘图仪简⽀梁振动传感器激振器⼒传感器质量块M或 M F x dt dxdt x d M F x dt dx n dtx d FKx dt dx C dtx d M /2/222222222=++=++=++ωξωω(3-1)式中:ω—系统固有圆频率ω =K/Mn ---衰减系数 2n=C/M ξ---相对阻尼系数ξ=n/ωF ——激振⼒ )2sin(sin 0ft B t B F πω== ⽅程①的特解,即强迫振动为:)2sin()sin(0?π?ω-=-=f A A x (3-2)式中:A ——强迫振动振幅--初相位20222024)(/ωωωn M B A +-=(3-3)式(3-3)叫做系统的幅频特性。
将式(3-3)所表⽰的振动幅值与激振频率的关系⽤图形表⽰,称为幅频特性曲线(如图3-3所⽰):3-2 单⾃由度系统⼒学模型 3-3 单⾃由度系统振动的幅频特性曲线图3-3中,Amax 为系统共振时的振幅;f 0为系统固有频率,1f 、2f 为半功率点频率。
振幅为Amax 时的频率叫共振频率f 0。
在有阻尼的情况下,共振频率为:221ξ-=f f a (3-4) 当阻尼较⼩时,0f f a =故以固有频率0f 作为共振频率a f 。
振动测试报告
振动测试模态分析报告班级:力学08-2 班姓名:方志涛学号:3号变时基锤击法简支梁模态测试一、实验目的1、学习模态分析原理;2、学习模态测试方法;3、学习变时基的原理和应用。
、实验仪器安装示意图三、实验原理1、模态分析方法及其应用模态分析方法是把复杂的实际结构简化成模态模型,来进行系统的参数识别〔系统识别〕,从而大大地简化了系统地数学运算。
通过实验测得实际响应来寻示相应的模型或调整预想的模型参数,使其成实际结构的最正确描述。
主要应用有:用于振动测量和结构动力学分析。
可测得比拟精确的固有频率、模态振型、模态阻尼、模态质量和模态刚度。
可用模态实验结果去指导有限元理论模型的修正,使计算机模型更趋于完善和合理。
用来进行结构动力学修改、灵敏度分析和反问题的计算。
用来进行响应计算和载荷识别。
2、模态分析根本原理工程实际中的振动系统都是连续弹性体,其质量与刚度具有分析的性质,只有掌握无限多个点在每瞬间时的运动情况,才能全面描述系统的振动。
因此,理论上它们都属于无限多自由度的系统,需要用连续模型才能加以描述。
但实际上不可能这样做,通常采用简化的方法,归结为有限个自由度的模型来进行分析,即将系统抽象为由一些集中质量块和弹性元件组成的模型。
如果简化的系统模型中有 n 个集中质量,一般它便是一个 n 自由度的系统, 需要n 个独立坐标来描述它们的运动,系统的运动方程是 n 个二阶互相耦合〔联立〕的常微分方程。
模态分析是在成认实际结构可以运用所谓“模态模型〞来描述其动态响应的条件下,通 过实验数据的处理和分析,寻求其“模态参数〞,是一种参数识别的方法。
模态分析的实质,是一种坐标转换。
其目的在于把原在物理坐标系统中描述的响应向量, 放到所谓“模态坐标系统〞中来描述。
这一坐标系统的每一个基向量恰是振动系统的一个特 征向量。
也就是说在这个坐标下,振动方程是一组互无耦合的方程,分别描述振动系统的各阶振动形式,每个坐标均可单独求解,得到系统的某阶结构参数。
机械振动实验报告

《机械振动基础》实验报告(2015年春季学期)姓名学号班级专业机械设计制造及其自动化报告提交日期 2015.05.07哈尔滨工业大学报告要求1.实验报告统一用该模板撰写,必须包含以下内容:(1)实验名称(2)实验器材(3)实验原理(4)实验过程(5)实验结果及分析(6)认识体会、意见与建议等2.正文格式:四号字体,行距为1.25倍行距;3.用A4纸单面打印;左侧装订;4.报告需同时提交打印稿和电子文档进行存档,电子文档由班长收齐,统一发送至:。
5.此页不得删除。
评语:教师签名:年月日实验一报告正文一、实验名称:机械振动的压电传感器测量及分析二、实验器材1、机械振动综台实验装置(压电悬臂梁) 一套2、激振器一套3、加速度传感器一只4、电荷放大器一台5、信号发生器一台6、示波器一台7、电脑一台8、NI9215数据采集测试软件一套9、NI9215数据采集卡一套三、实验原理信号发生器发出简谐振动信号,经过功率放大器放大,将简谐激励信号施加到电磁激振器上,电磁激振器振动杆以简谐振动激励安装在激振器上的压电悬臂梁。
压电悬臂梁弯曲产生电流显示在示波器上,可以观测悬臂梁的振动情况;另一方面,加速度传感器安装在电磁激振器振动杆上,将加速度传感器与电荷放大器连接,将电荷放大器与数据采集系统连接,并将数据采集系统连接到计算机(PC机)上,操作NI9215数据采集测试软件,得到机械系统的振动响应变化曲线,可以观测电磁激振器的振动信号,并与信号发生器的激励信号作对比。
实验中的YD64-310型压电式加速度计测得的加速度信号由DHF-2型电荷放大器后转变为一个电压信号。
电荷放大器的内部等效电路如图1所示。
q图1 加速度传感器经电荷放大的等效电路压电悬臂梁的简谐振动振幅与频率测量实验原理如图2所示,实验连接图如图3所示。
图2 简谐振动振幅与频率测量原理图图3 实验连接图四、实验过程打开所有仪器电源,将DG-1022型信号发生器的幅值旋钮调至最小,采用正弦激励信号, DHF-2型电荷放大器设置为100mv/UNIT (YD64-310型加速度计的标定电荷灵敏度为13.2PC/ms-2,本实验中将电荷放大器的灵敏度人工设定为132PC/ms-2,并且增益调至10mV/Unit档,则该设定下电荷放大器的总增益为100mV/Unit。
随机振动测试报告

随机振动测试报告
申請人 (Requested By)
测试设备 (Test Equipment)
振动试验台
樣品型/編號 (Sample Model.)
#1~#24
提交日期 (Submitted Date)
2019.11.21
供应商 (supplier)
樣品數 (Sample QTY)
判定结果 Conclusion
合格(Pass)
不合格(Reject)
條件接受(Conditional Acceptable)
供参考(For Reference)
表单编号:YH-QA-014
測試人/日期 (Tested By/Date)
審核人/日期 (Checked By/Date)
復核人/日期 (Confirmed By/Date)
测试方法(Test methods): 在满包装时的状态 ——振动频率:3~100Hz; ——功率频谱密度:>0.1g2/hz; 测试方法/判定 ——振动偏差:10mm; 标准 (Test methods/ ——测试时间:每个轴向30分钟,共测试3个轴向。 Judgement standard) 判定标准(Judgement standard) : ————各级包装外观没有任何损伤; ——产品的外观和功能没有任何不良。
OK
OK
测试状态 (Test Status)
测试前
樣品3
OK 樣品11
OK 樣品19
OK
樣品4
樣品5
OK 樣品12
OK 樣品20
OK
测试中
OK 樣品13
OK 樣品21
OK
樣品6
OK 樣品14
振动实验报告1

振动实验报告1实验⼀振动系统固有频率的测试⼀、实验⽬的:1、学习振动系统固有频率的测试⽅法;2、学习共振动法测试振动固有频率的原理与⽅法;3、学习锤击法测试振动系统固有频率的原理与⽅法;⼆、实验原理1、简谐⼒激振1)幅值判别法在激振功率输出不变的情况下,由低到⾼调节激振器的激振频率,通过⽰波器,我们可以观察到在某⼀频率下,任⼀振动量(位移、速度、加速度)幅值迅速增加,这就是机械振动系统的某阶固有频率。
这种⽅法简单易⾏,但在阻尼较⼤的情况下,不同的测量⽅法得出的共振动频率稍有差别,不同类型的振动量对振幅变化敏感程度不⼀样,这样对于⼀种类型的传感器在某阶频率时不够敏感。
2)相位判别法相位判法是根据共振时特殊的相位值以及共振动前后相位变化规律所提出来的⼀种共振判别法。
在简谐⼒激振的情况下,⽤相位法来判定共振是⼀种较为敏感的⽅法,⽽且共振是的频率就是系统的⽆阻尼固有频率,可以排除阻尼因素的影响。
A.位移判别共振将激振动信号输⼊到采集仪的第⼀通道(即X 轴),位移传感器输出信号或通过ZJY-601A 型振动教学仪积分档输出量为位移的信号输⼊到第⼆通道(即Y 轴),此时两通道的信号分别为激振信号为:位移信号为:共振时,,X 轴信号和Y 轴信号的相位差为p / 2,根据利萨如图原理可知,屏幕上的图象将是⼀个正椭圆。
当w 略⼤于n w 或略⼩于n w 时,图象都将由正椭圆变为斜椭圆,其变化过程如下图所⽰。
因此图象图象由斜椭圆变为正椭圆的频率就是振动体的固有频率。
B.速度判别共振将激振信号输⼊到采集仪的第⼀通道(即X 轴),速度传感器输出信号或通过ZJY-601A 型振动教学仪积分档输出量为速度的信号输⼊到第⼆通道(即Y 轴),此时两通道的信号分别为:激振信号为:速度信号为:共振时,,X 轴信号和Y 轴信号的相位差为p / 2。
根据利萨如图原理可知,屏幕上的图象应是⼀条直线。
当w 略⼤于n w 或略⼩于n w 时,图象都将由直线变为斜椭圆,其变化过程如下图所⽰。
振动测试实验报告
竭诚为您提供优质文档/双击可除振动测试实验报告篇一:振动实验报告l机械振动实验报告1.测量简支梁的固有频率和振型1.1实验目的用激振法测量简支梁的固有频率和固有振型。
掌握多自由度系统固有频和振型的简单测量方法。
1.2实验原理共振法测量振动系统的固有频率是比较常用的方法之一。
共振是指当激振频率达到某一特定值时,振动量的振动幅值达到极大值的现象。
本次试验主要利用调整激振频率使简支梁达到位移振动幅值的方法来测量简支梁的一阶,二阶以及三阶固有频率以及从计算机上读取其当时的振型!1.3实验内容与结果分析(1)将激振器通过顶杆连接到简支梁上(注意确保顶杆与激振器的中心线在一直线上),激振点位于简支梁中心偏左50mm处(已有安装螺孔),将信号发生器输出端分别与功率放大器和数据采集仪的输入端连接,并将功率放大器与激振器相连接。
(2)用双面胶纸(或传感器磁座)将加速度传感器A粘贴在简支梁上5#测点(实验时固定不动,用于与其他测点比较相位),将加速度传感器连接,将电荷放大器输出端与数据采集仪的输入端连接。
(3)将信号发生器和功率放大器的幅值旋钮调至最小,打开所有仪器电源。
打开控制计算机,打开做此次试验所需的测试软件,进入页面设置好各项参数。
通过调节激振频率,观察简支梁位置幅值振动情况。
可以通过放在简支梁上的装有一定量塑质小球的小型透明容器直观的观察里面小球的振动情况,小球振动越厉害,也就说明简支梁振动的位移幅值越大;还可以通过分辨简支梁在不同激振频率下的发出的振动声音,声音越大,说明振动幅值越大!(4)通过(3)中的方法,可以测量出在简支梁在某一激振频率范围内的振动幅值,则此激振频率就是我们需要测量的一阶,二阶以及三阶固有频率,在测出固有频率的同时将计算机上画出的各阶振型的图像保存,以便结果的分析。
(5)在完成所有的试验内容之后,通过记录下的实验数据分析实验的结果。
所得的实验结果如下:测得的简支梁的一阶、二阶以及三阶的固有频率为?=35.42hZ,?=131.54hZ,?3=258.01hZ。
振动系统固有频率的测试实验原理、方法和报告
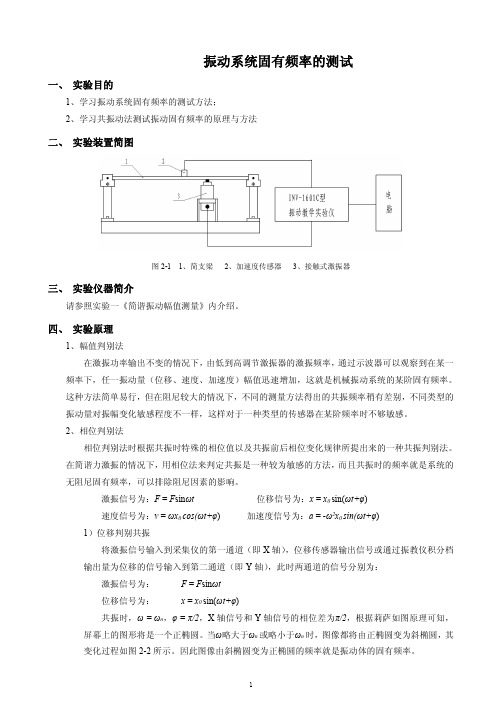
振动系统固有频率的测试一、实验目的1、学习振动系统固有频率的测试方法;2、学习共振动法测试振动固有频率的原理与方法二、实验装置简图图2-11、简支梁2、加速度传感器3、接触式激振器三、实验仪器简介请参照实验一《简谐振动幅值测量》内介绍。
四、实验原理1、幅值判别法在激振功率输出不变的情况下,由低到高调节激振器的激振频率,通过示波器可以观察到在某一频率下,任一振动量(位移、速度、加速度)幅值迅速增加,这就是机械振动系统的某阶固有频率。
这种方法简单易行,但在阻尼较大的情况下,不同的测量方法得出的共振频率稍有差别,不同类型的振动量对振幅变化敏感程度不一样,这样对于一种类型的传感器在某阶频率时不够敏感。
2、相位判别法相位判别法时根据共振时特殊的相位值以及共振前后相位变化规律所提出来的一种共振判别法。
在简谐力激振的情况下,用相位法来判定共振是一种较为敏感的方法,而且共振时的频率就是系统的无阻尼固有频率,可以排除阻尼因素的影响。
激振信号为:F=F sinωt位移信号为:x=x0sin(ωt+φ)速度信号为:v=ωx0cos(ωt+φ)加速度信号为:a=-ω2x0sin(ωt+φ)1)位移判别共振将激振信号输入到采集仪的第一通道(即X轴),位移传感器输出信号或通过振教仪积分档输出量为位移的信号输入到第二通道(即Y轴),此时两通道的信号分别为:激振信号为:F=F sinωt位移信号为:x=x0sin(ωt+φ)共振时,ω=ωn,φ=π/2,X轴信号和Y轴信号的相位差为π/2,根据莉萨如图原理可知,屏幕上的图形将是一个正椭圆。
当ω略大于ωn或略小于ωn时,图像都将由正椭圆变为斜椭圆,其变化过程如图2-2所示。
因此图像由斜椭圆变为正椭圆的频率就是振动体的固有频率。
ω<ωnω=ωnω>ωn图2-2用位移判别共振的莉萨如图形2)速度判别共振将激振信号输入到采集仪的第一通道,速度传感器输出信号或通过振教仪积分档输出量为速度的信号输入到第二通道(即Y轴),此时两通道的信号分别为:激振信号为:F=F sinωt速度信号为:v=ωx0cos(ωt+φ)共振时,ω=ωn,φ=π/2,X轴信号和Y轴信号的相位差为π/2,根据莉萨如图原理可知,屏幕上的图形将是一条直线。
震动模块实验报告
一、实验目的1. 了解震动模块的基本原理和工作方式。
2. 掌握震动模块在Arduino平台上的应用方法。
3. 学习通过编程控制震动模块的震动强度和频率。
4. 探索震动模块在不同场景下的应用。
二、实验原理震动模块是一种将电信号转换为机械振动的装置,广泛应用于手机、玩具、按摩器等领域。
本实验使用的震动模块采用高品质手机震动马达,通过输入高电平信号,可以使马达震动,从而产生震动效果。
三、实验材料1. Arduino UNO开发板2. 震动模块3. 杜邦线4. 9V电池5. 电阻6. 连接线7. 示波器(可选)四、实验步骤1. 搭建电路将震动模块的VCC脚连接到Arduino的5V引脚,GND脚连接到Arduino的GND引脚,震动模块的输出脚连接到Arduino的数字引脚(例如D2)。
2. 编写程序(1)初始化震动模块的引脚:在Arduino IDE中,打开“Arduino.h”文件,找到“pinMode”函数,并将震动模块的输出脚设置为输出模式。
(2)编写控制震动模块的函数:创建一个名为“vibrate”的函数,用于控制震动模块的震动强度和频率。
在该函数中,使用“digitalWrite”函数输出高电平信号,使震动模块开始震动。
(3)编写主程序:在主程序中,调用“vibrate”函数,并通过修改震动频率和强度参数,实现不同的震动效果。
3. 编译并上传程序将编写好的程序编译并上传到Arduino UNO开发板。
4. 测试实验使用示波器观察震动模块的输出波形,并调整程序中的参数,观察震动频率和强度的变化。
五、实验结果与分析1. 震动频率和强度调整通过调整程序中的震动频率和强度参数,可以改变震动模块的震动效果。
实验结果表明,当频率较高时,震动模块的震动强度较大;当频率较低时,震动强度较小。
2. 震动模块在不同场景下的应用(1)手机震动提醒:在手机静音模式下,通过编程控制震动模块,可以实现手机震动提醒功能。
振动测试报告样表
3#钻孔
0
0.066
0.042
-17
0.047
0.030
-33
0.059
0.036
4最大值汇总
(1)由表1可以看到,截止到2011年1月16日,分层沉降的最大值累计值在3.6mm,在预警值范围以内。(仪器精度为1mm,最后一位为估读值。)
(2)表2可以看到1月16日的加速度峰值最大为0.066m/s2,在报警值以内。
振动测试报告
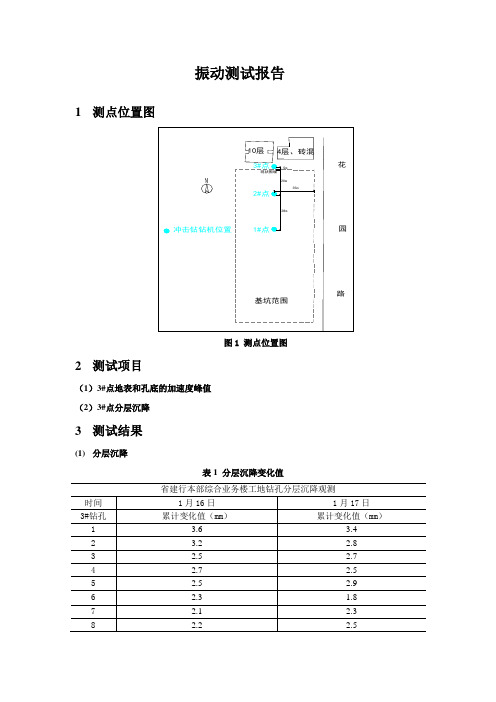
1测点位置图
图1测点位置图
2测试项目
(1)3#点地表和孔底的加速度峰值
(2)3#点分层沉降
3测试结果
(1)分层沉降
表1分层沉降变化值
省建行本部综合业务楼工地钻孔分层沉降观测
时间
1月16日
1月17日
3#钻孔
累计变化值(mm)
累计变化值(mm)
1
3.6
3.4
2
3.2
2.8
3ቤተ መጻሕፍቲ ባይዱ
2.5
2.7
4
2.7
2.5
5
2.5
2.9
6
2.3
1.8
7
2.1
2.3
8
2.2
2.5
9
2.0
1.9
10
1.1
1.2
11
1.5
1.6
12
1.5
1.0
13
0.9
0.6
14
0.9
0.7
15
0.8
0.7
备注:正号表示下降,负号表示上升。
(2)加速度峰值
表2加速度峰值
时间
1月16日(晚)
1月17日(晚)
强夯振动监测研究

强夯振动监测研究摘要:通过强夯振动监测,确定强夯施工时周边建(构)筑物的安全距离。
关键词:强夯振动监测影响范围安全距离一、前言强夯地基处理方法具有施工简单、加固效果好、施工速度快、使用经济,从而在世界范围内得到广泛应用。
同时,强夯也是一种冲击型振源,当落锤夯击地基土时,在土层中产生强大的冲击波,从夯点向四周传播,由于振动波几何阻尼和地基土材料阻尼综合作用,一般持续时间较短,约0.4~1.0s。
其主频振动对周围环境产生振动影响。
在确定采用强夯法处理地基之前,应该充分地对强夯振动的潜在危害性进行评价,了解和掌握强夯振动的影响范围以及强夯振动随距离的衰减规律是进行强夯振动效应评价的基础。
现对内蒙古某工程项目1000kN.m、3000kN.m两个能级强夯施工进行振动监测测试,作为评价强夯振动对周边建(构)筑物的影响的依据。
二、工程地质条件场地内地层根据勘察报告,勘探深度范围内,场地地层主要由第四系风积粉细砂和冲洪积成因的细砂组成。
场地从北至南,从东至西,下部地层砂粒有逐渐变粗的现象。
地层自上而下依次划分为:第①层:粉细砂(Q4eol),褐黄色,风积成因,成分以石英、长石为主,层中可见植物根系,含少量粉土,松散~稍密状态,该层沉积厚度不规律。
标贯击数平均值为9.6击(未经杆长修正,下同)。
层厚0.2~2.5米。
第②层:细砂(Q4al+pl),系冲洪积形成,浅黄色~灰白色,成分以石英、长石为主,级配较差,局部混中砂或渐变为中砂层,稍密~中密,稍湿。
标贯击数平均值为16.6击。
层厚3.4~6.8米,层底埋深5.0~7.5米。
第③层:细砂(Q4al+pl),系冲洪积形成,浅黄色~灰白色,偶夹褐黄色薄层砂,成分以石英、长石为主,级配较差,局部混夹中砂或渐变为中砂层,偶见粗砂,中密~密实,稍湿。
标贯击数平均值为23.2击。
层厚3.2~6.2米,层底埋深9.2~12.5米。
第④层:细砂(Q4al+pl),系冲洪积形成,浅黄色~灰白色,含氧化铁,少量粗砂,成分以石英、长石为主,级配差,分选较好,局部夹薄层中砂或渐变为中砂层。
简谐振动振幅与频率测量实验报告

从对话框中点击按钮“选择采集卡型号” ─>“select”,扫描通道设置为 0. 点击按钮“采集”,记录软件界面右边的频率与增幅。 根据公式 V 采/100mv 计算出加速度(TS5863 功率放大器设置为 100mv/UNIT 时适用)。 重复步骤 4、5 五次,制成下面表格后计算平均值。
(2)数据表格
l台
6、电脑
l台
7、测试软件
l套
四、 实验数据处理
(1)、实验方法及步骤:
打开所有仪器电源,将 TS1212B 信号发生器(开关在后面左边)的幅值旋钮调至最小, TS5863 功率放大器设置为 100mv/UNIT。设置信号发生器为“手动”模式,调节“手 动扫频”至固定频率(30~60Hz 任意自选),调节幅值旋钮使其输出电压为 2V(左边起 每过一个点代表加 1V)。 打开桌面程序“测试技术教学实验软件最新版”,点击菜单“高速采集”─>“中断
次数 V采
1
2
3
4
5
平均值
加速度 m/s2
由公式 a=V 采/100mv 计算得出五次不同的加速度
2
五、 实验结果及讨论
3
Байду номын сангаас
二、 实验原理
双简支梁的简谐振动振幅与频率测量实验原理如图 1 所示:
加速度传感器
双简支梁
激振器
电荷放大器
电脑
信号发生器
功率放大器
图 1 简谐振动振幅与频率测量原理图
1
三、 仪器及装置
1、机械振动综台实验装置(安装双简支梁)
1套
2、激振器及功率放大器
1套
3、加速度传感器
1只
4、电荷放大器
1台
5、信号发生器
20.振动筛验证报告

验证报告目录1. ZS-500型振荡筛验证报告2. ZS-500型振荡筛验证报告记录2.1安装确认2.1.1文件及技术资料2.1.2设备材质2.1.3设备结构2.1.4电气安装2.1.5安装确认小结2.2.运行确认2.2.1目的2.2.2运行前检查2.2.3运行检查2.2.4运行确认小结2.3.性能确认2.3.1目的2.3.2方法2.3.3合格标准2.3.4测试记录2.3.5性能确认小结ZS-500型振荡筛验证报告编号:WAL-XB-018-00 一、验证项目名称:ZS-500型振荡筛验证二、验证方案见ZS-500型振荡筛验证方案三、验证实施日期:2005年月日-2005年月日四、各验证项目结论:●安装确认:验证该设备的安装是否符合设备安装的要求.1、可接受标准:文件资料齐全,设备性能设计符合要求;设备安装符合设计规范.2、验证结果:查阅设备档案设文件齐全,设备性能设计符合要求;设备安装符合设计规范.(详见验证记录2.1.安装确认)3、安装确认结论: ZS-500型振荡筛安装符合要求●运行确认:验证该设备在空载运行时,符合设计要求,并检查设备操作规程的适用性1、可接受标准:按照设备操作规程空载运行,各项参数是否符合要求2、验证结果:按照设备操作规程空载运行,各项参数符合要求(详见验证记录2.2.运行确认)3、运行确认结论:ZS-500型振荡筛运行符合要求●性能确认:验证该设备在负载运行时,对工艺的适应性.1、可接受标准:本试验用淀粉颗粒,按该设备操作规程进行操作,各项性能符合标准.2、验证结果:本试验用淀粉颗粒,按该设备操作规程分别进行操作,设备各项性能参数(详见验证记录2.3.性能确认)3、性能确认结论:ZS-500型振荡筛性能符合要求五、评价与建议:1、该设备应按批准的标准操作、维护保养程序进行操作、维护和保养.2、再验证2.1该设备应在当前验证的条件下使用,使用条件发生变更,应报验证委员会审核,必要时重新验证.2.2该设备一年再验证一次.六、验证报告汇签表:七、验证批准:经验证,同意“ZS-500型振荡筛投入使用”。
动刚度报告模板
动刚度报告模板概述动刚度报告用于对机械系统进行动态刚度测试和分析,以评估系统的振动特性和稳定性。
本文档提供动刚度测试的报告模板,用于记录测试数据和结果,并对测试结果进行分析和总结,以支持系统设计和故障诊断。
测试对象测试对象应包括机械系统的关键部件或总体结构,以涵盖系统的振动特性和稳定性。
测试对象应符合以下要求:•测试对象必须处于正常工作状态。
•测试对象必须符合设计要求和标准规范。
•测试对象必须具有稳定的机械结构和动态特性。
测试方法测试方法应基于系统的特性和测试目的,选择合适的测试方案和测量方法。
常用的测试方法包括:•自由振动测试:通过施加质量采用自由振动方法测量系统的固有频率和阻尼比。
•强制振动测试:通过施加外部激励信号测量系统的传递函数和频率响应曲线。
•模态测试:通过系统的自由和强制振动模态分析系统的振动特性。
测试方法需要记录测试过程中用到的仪器设备、测试参数和测试结果,并进行数据处理和分析。
测试结果测试结果应包括以下内容:•系统的固有频率和阻尼比。
•系统的传递函数和频率响应曲线。
•系统的振动模态和主导模态频率。
•数据处理和分析结果。
•结论和建议。
测试结果应具有可读性和可重复性,并符合相关的规范和标准要求。
对测试结果进行分析和总结,结合系统的设计要求和实际使用情况,给出有效的建议和改进措施。
结论和建议根据测试结果和分析,给出以下结论和建议:•系统的速度反馈环节存在较大的共振现象,建议通过调整控制参数和增加阻尼措施来改进控制性能。
•系统的强制振动测试中出现了不稳定的频段,建议在此频段增加阻尼措施或采取其他措施来消除振动干扰。
•系统的振动模态测试表明存在一些特定频率的振动模态,建议在设计和使用过程中避免这些频率,或通过增加结构刚度和阻尼措施来减小振动幅度。
总结本文档提供了动刚度测试的报告模板,用于记录测试过程和结果。
测试结果包括系统的固有频率、阻尼比、传递函数、频率响应曲线和振动模态,根据测试结果和分析给出结论和建议。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测试员:
序号
测试项目
1
振动
5PCS
3.实验图示:
4.实验数据: 编号 1 2 3 4 5
测试项目 及标准 性能 测试数据 是否 OK 判定
频率范围:8.3+/-1Hz~200+-/4Hz~8.31+/-Hz,最大加速度:43.2周期:20分钟,三个相互垂直的方 向,每个方向12个周期,试验后测试产品性能是否OK。 试验前 OK OK 试验后 OK OK 试验前 OK OK 审核: 试验后 OK OK 试验前 OK OK 试验后 OK OK 核准: 试验前 OK OK 试验后 OK OK 试验前 OK OK 试验后 OK OK
振动测试报告表
报告日期(Report Rate):2018.04.05 实验产品: 实验日期:2018.4.20 1.实验项目:□相位差 □定位点力矩 □定位点数及位置 □分解能力 □振荡 □滑动杂讯 □端子间接触阻抗 □轴的推拉强度 □端子强度 □轴摆动 □轴的回转方向摆动 □绝缘阻抗 □耐电压 □焊锡性 ■振动 □低温特性 □耐湿性 2.实验目的: □新产品试产 □风险订单 □新品量产 □物料承认 □验证结构 ■客户要求 □性能验证 □年度计划 测试条件/要求 频率范围:8.3+/-1Hz~200+-/4Hz~ 8.31+/-Hz,最大加速度: 43.2m/s(4.4g),最大振幅:10mm,一个 周期:20分钟,三个相互垂直的方 向,每个方向12个周期,试验后测试 产品性能是否OK。 测试数量 测试 结果 ■ PASS □ FALL 备注 报告编号(Report No): 实验地点: 实验人员: