新控制系统说明书
C2000说明书印刷版

感谢您选择本公司快速门专用控制系统!操作之前,请您务必详细阅读此本说明手册,谢谢!本手册为2018年新版本详细介绍了控制系统的各项功能。
具体的功能描述,控制系统详细说明及报警信息,请参见正文。
我们尽全力制作完成本手册,但疏漏之处也在所难免,我们无法保证本手册的100%的完整性和准确性。
希望用户提出宝贵意见,帮助我们不断的完善!对于没有按照指导说明及提示或错误操作而造成的损失,本公司将不承担任何责任。
若您能发现手册中出现的问题并及时通知我们,我们将不胜感激。
本手册中描述的安装说明以良好的安装条件为基础,我们不能保证控制系统在不良环境中发挥最好的功能。
我们不保证此手册信息可适用于陌生的保护条款。
此外,本公司也不颁发任何专利证书及其它保护条款许可证。
本手册主要为用户提供可以正确使用和维护的相关指导和说明,手册中涉及到控制器的安装、参数设定、异常诊断、排除及日常维护等。
产品性能三相异步电动机的定子绕组是一个空间位置对称的三相绕组,在定子绕组通入三相对称的交流电流,就会在电动机内部建立起一个恒速的旋转磁场,带动电机转子高速旋转,再通过电机运行时尾部自配的风扇自行风冷散热,使其具备使用寿命长、故障低的特性。
本公司专业设计的门业变频专用控制系统,让电机比更低电压、低电流(更耗电低)启动和停止,达到门帘缓起缓停功能,通过智能控制让门帘中段自行高速运行,减短门帘运行时间(整体视觉更柔畅)。
符合国家提倡的节能环保要求;加上应用新一代绝对值编码器定位技术(电子数字定位),使门帘停止时定位更精准,减少门帘跑位现象。
让您使用快速门更放心、安心。
交货检查每台控制器在出厂前,均经严格的品管。
开箱时,请认真确认:在运输中是否有破坏或刮伤损坏现象,本机铭牌的额定值是否与您订货要求相一致。
1一安全说明一、在操作使用控制系统时,务必要注意重要的安全说明及安装、连接说明。
1、所有安装,操作工作须由专业人员完成,并且要符合以下规定:VDE0100,EN50110(VDE 0105),EN60204(VDE0113),EN50178(VDE0160),EN60335(VDE0700),防火规定,事故预防规定以及相应的工业门规定。
新代数控系统说明书
新代数控系统说明书新代数控系统说明书1. 简介新代数控系统是一种基于计算机技术和数学模型的智能化控制系统,用于控制数控设备进行精确的加工操作。
本说明书将介绍新代数控系统的功能特点、操作流程和使用注意事项。
2. 功能特点2.1 高精度控制新代数控系统采用先进的控制算法和精密的传感器,能够实现对数控设备的高精度控制。
通过精确计算和实时反馈,系统能够准确控制加工过程中的位置、速度和力度,保证加工效果的精度和质量。
2.2 多轴联动新代数控系统支持多轴联动控制,可以同时控制数控设备的多个轴向,实现复杂的运动路径和多维度的加工操作。
通过精密计算和协调控制,系统能够实现良好的轴向同步和协同运动,提高加工效率和精度。
2.3 丰富的指令集新代数控系统提供丰富的指令集,覆盖了常见的加工操作需求。
用户可以通过简单的指令来实现各种加工操作,如直线切割、圆弧切割、孔加工等。
系统还支持用户自定义指令,以满足特殊加工需求。
2.4 友好的用户界面新代数控系统提供简洁直观的用户界面,用户可以通过触摸屏或键盘输入来操作系统。
界面设计符合人体工程学原理,操作简单便捷。
同时,系统还提供多国语言支持,便于全球用户使用。
3. 操作流程3.1 系统启动在系统通电后,按下电源按钮启动系统。
系统会进行自检和初始化操作,确保各个硬件设备正常工作。
启动完成后,系统进入待机状态。
3.2 加工准备用户需要加载加工文件到系统中。
可以通过U盘、局域网或云端等方式将加工文件传输到系统中。
系统支持常见的加工文件格式,如G代码、CAD文件等。
3.3 参数设置在加载加工文件后,用户需要根据加工要求设置相关参数。
系统提供了参数设置界面,用户可以根据实际需求进行参数调整,如切削速度、进给速度、加工深度等。
3.4 效果预览在参数设置完成后,用户可以通过系统提供的效果预览功能,查看加工效果。
系统会根据加载的加工文件和参数设置,模拟加工过程并显示预览效果。
3.5 加工操作当用户确认加工效果无误后,可以开始加工操作。
中航wifi控制系统电脑端操作说明书

中航WIFI控制系统电脑端操作说明注意:3.10.50,3.13.50,3.15.50,3.16.50以及更高版本的控制卡,用电脑软件发内容,请参照以下步骤,如果不是此版本请参照第二章节步骤操作第一步:软件下载进入中航软件官网,点击下载中心,单双色软件电脑版V6软件第二步:双击安装,一直点下一步,直到安装完成。
第三步:注册,当电脑可以联网时,手机下载LED魔宝扫码注册,或者用短信注册;当电脑不能联网时,手机下载LED魔宝,扫一扫得到认证码,在电脑端输入即可注册第四步:输入手机软件修改的密码,连接WiFi第五步:点设置——屏幕设置——密码168,设置对应的屏幕参数,点击关闭(图一);如果不确定具体型号,可选择任一款WiFi卡型号,点击回读屏参,即可载入参数(图二)(图一)(图二)第六步:编辑内容,点击发送;在弹出的WiFi连接界面,点击发送第七步:初次发送内容时,会弹出“显示屏密码强度弱,请再次发送设置显示屏密码”点击确定设置显示屏密码,点击确定,当提示“设置用户密码成功”,点击确定即可发送成功。
第二章节注意:3.10.3x,3.13.3x,3.15.3x,3.16.3x版本的控制卡,用电脑软件发内容之前,需要先用手机软件发送,修改默认密码之后,电脑软件才可以发送内容第一步:软件下载进入中航软件官网,点击下载中心,单双色软件电脑版V6软件第二步:双击安装,一直点下一步,直到安装完成。
第三步:注册,当电脑可以联网时,手机下载LED魔宝扫码注册,或者用短信注册;当电脑不能联网时,手机下载LED魔宝,扫一扫得到认证码,在电脑端输入即可注册第四步:输入手机软件修改的密码,连接WiFi第五步:点设置——屏幕设置——密码168,设置对应的屏幕参数,点击关闭第六步:编辑内容,点击发送即可。
浙江明德自动化设备 全自动袜机电脑控制系统 说明书
浙江明德自动化设备有限公司 袜机电脑控制系统1全自动全自动袜机袜机袜机电脑电脑电脑控制系统控制系统说 明 书浙江明德自动化设备有限公司浙江明德自动化设备有限公司电话05710571--8799538887995388浙江明德自动化设备有限公司 袜机电脑控制系统2目录第一部分第一部分、、概述 1-1 使用须知 ..............................................................................4 1-2 功能介绍 (5)第二部分第二部分、、配置介绍 2-1 电脑操作面板说明 ..................................................................7 2-2 开机操作说明 ........................................................................7 2-3 功能键介绍 (9)第三部分第三部分、、测试测试机器外设机器外设 3-1 测试气阀 ...........................................................................11 3-2 测试选针器...........................................................................13 3-3 测试键盘..............................................................................14 3-4 测试步进电机........................................................................14 3-5 测试伺服电机........................................................................15 3-6 测试信号输入 (16)第四部分第四部分、、设置机器参数 4-1 编辑机器参数........................................................................17 4-2 编辑外设位置........................................................................18 4-3 编辑工作参数........................................................................20 4-4 编辑密度参数........................................................................21 4-5 显示提花针排列 (22)第五部分第五部分、、磁盘管理 5-1 花型文件输入........................................................................23 5-2 链条文件输入........................................................................24 5-3 动作文件输入........................................................................24 5-4 选针资料的输入.....................................................................24 5-5 机器参数的输入.....................................................................24 5-6 工作参数的输入.....................................................................25 5-7 花型文件输出........................................................................25 5-8 链条文件输出........................................................................26 5-9 动作文件输出........................................................................26 5-10 输出选针资料........................................................................27 5-11 输出机器参数........................................................................27 5-12 输出工作参数 (28)浙江明德自动化设备有限公司 袜机电脑控制系统3第六部分第六部分、、编辑机器工作文件 6-1 编辑链条文件........................................................................29 6-2 编辑动作文件........................................................................33 6-3 编辑选针资料........................................................................34 6-4 编辑花型文件........................................................................34 6-5 编辑花型循环........................................................................36 6-6 编辑主梭配置........................................................................38 6-7 编辑添纱配置 (39)第七部分第七部分、、编织主界面编织主界面 (41)第八部分第八部分、、实际操作错误实际操作错误 (42)第一部分概述1-1使用须知欢迎您使用明德公司生产的5F与6F袜机电脑控制系统。
纳博特20.06控制系统操作手册说明书

2020控制系统操作手册20.06纳博特目录第2章安全注意事项 (15)注意事项 (15)第3章产品组装 (16)3.1示教盒安装 (16)3.2控制柜安装 (16)3.2.1线缆要求 (17)3.2.2布线要求 (18)3.2.3接地要求 (18)3.2.4接线注意事项 (19)第4章新机器人配置步骤 (20)第5章机器人的坐标系与轴操作 (26)5.1控制组与坐标系 (26)5.1.1坐标系 (26)坐标系与轴操作 (27)5.1.2关节坐标系 (27)5.1.3直角坐标系 (28)5.1.4工具坐标系 (29)5.1.5用户坐标系 (30)5.2外部轴 (33)第6章示教器按键与界面简介 (34)6.1T20示教器物理按键 (34)6.2T30示教器物理按键 (35)6.3操作系统简介 (37)6.3.1基本说明 (37)6.3.2状态介绍 (37)6.4界面介绍 (38)6.4.1主页 (38)6.4.2用户 (39)6.4.3设置 (41)6.4.4用户坐标标定 (43)6.4.5系统设置 (44)6.4.6远程程序设置 (48)6.4.11Modbus设置 (69)6.4.12后台任务 (71)6.4.13网络设置 (72)6.4.14数据上传 (73)6.4.15程序自启动 (73)6.4.16操作参数 (74)6.4.17工艺 (75)6.4.18变量 (103)6.4.19状态 (105)6.4.20工程 (107)6.4.21程序 (108)6.4.22日志 (109)6.4.23监控 (110)第7章机器人示教与运行 (111)7.1机器人准备 (111)7.1.1开机与安全确认 (111)7.1.2示教器准备 (111)7.2点动操作 (111)7.2.1示教速度调节 (112)7.2.2坐标系说明与切换 (112)7.2.3点动操作 (113)7.3程序编写 (113)7.3.1程序新建/打开/删除/重命名/复制 (113)7.3.2指令操作 (118)7.3.3指令说明(指令规范) (122)7.4程序运行 (142)7.4.1示教模式 (143)7.4.2运行模式 (143)7.4.3远程模式 (143)7.4.4从当前行运行 (145)7.5.4远程IO速度修改方式 (147)第8章工具手与用户坐标 (149)8.1工具手标定 (149)8.1.1工具坐标系 (149)8.1.2TCP:TOOL CENTER POINT,即工具中心点 (149)8.1.3工具坐标系特点 (150)8.1.4工具手参数设置 (151)8.1.57点标定 (152)8.1.612/15点标定 (156)8.1.720点标定 (161)8.1.82点标定 (162)8.2用户坐标系 (163)8.2.1用户坐标系作用 (164)8.2.2用户坐标参数设置 (165)8.2.3用户坐标系标定 (165)第9章数值变量 (167)9.1变量的名称 (167)9.2全局数值变量 (167)9.3全局数值变量使用 (169)9.3.1定义全局数值变量 (169)9.3.2通过计算指令为全局数值变量赋值 (169)9.3.3直接变量赋值 (171)9.3.4使用全局数值变量来计数 (172)9.4局部数值变量 (172)9.5局部变量使用 (173)9.5.1定义局部数值变量 (173)9.5.2使用计算指令为局部变量赋值 (174)9.5.3直接为变量赋值 (174)第10章位置变量 (175)10.1全局位置变量 (175)10.3.4READPOS 指令 (179)10.3.5USERFRAME_SET 指令 (180)10.3.6TOOLFRAME_SET 指令 (180)10.3.7COPYPOS 指令 (180)10.44轴SCARA机器人左右手 (180)10.4.1全局变量设置左右手 (181)第11章条件判断类指令的使用 (183)11.1指令说明 (183)11.1.1CALL (183)11.1.2IF (183)11.1.3ELSE (184)11.1.4ELSEIF (185)11.1.5WHILE (187)11.1.6WAIT (188)11.1.7LABEL (189)11.1.8JUMP (190)11.1.9UNTIL (191)11.1.10CRAFTLINE (192)11.1.11CMDNOTE (192)11.1.12POS_REACHABLE (192)11.1.13CLKSTART (193)11.1.14CLKSTOP (193)11.1.15CLKRESET (193)第12章后台任务 (194)12.1限制 (194)12.2注:运行模式按暂停按钮、远程模式IO暂停只暂停主程序,不暂停后台任务 (194)12.3后台任务编程 (195)12.3.1注意 (195)12.4主程序编程 (195)12.4.1PTHREAD_START(开启线程) (195)12.4.4CONTINUERUN(继续线程) (197)12.4.5STOPRUN (停止运行) (197)12.4.6RESTARTRUN(重新运行) (198)第13章IO、Modbus与远程程序 (199)13.1IO (199)13.1.1输入输出指令 (199)13.1.2I/O功能选择设置 (200)13.1.3IO状态提示设置 (201)13.1.4IO安全设置 (202)13.1.5IO复位 (202)13.1.6IO配置 (203)13.1.7使能IO (204)13.1.8报警消息 (205)13.1.9端口名称 (205)13.1.10远程模式IO预约简要说明 (206)13.2远程程序设置 (208)13.3复位点设置 (208)13.4远程功能的使用(IO) (209)13.4.1远程功能概述 (209)13.4.2远程功能使用步骤 (209)13.4.3编写程序 (209)13.4.4设置远程程序 (209)13.4.5设置IO (210)13.4.6切换到远程模式 (210)13.4.7预约排序 (210)13.4.8运行 (211)13.5Modbus修改地址码 (211)13.6Modbus的使用 (214)13.6.1ModBus功能概述 (214)13.6.2Modbus触摸屏使用流程 (214)第14章多机模式与双机协作 (218)14.1设置机器人 (218)14.2切换机器人 (219)第15章视觉工艺 (222)15.1视觉参数设置 (222)15.2视觉范围设置 (224)15.3 (225)15.4视觉位置参数 (225)15.5位置调试 (226)15.6视觉运作方式 (226)15.7视觉指令 (226)15.7.1VISION_RUN (226)15.7.2VISION_TRG (227)15.7.3VISION_POSNUM (227)15.7.4VISION_POS (227)15.7.5VISION_CLEAR (227)15.7.6VISION_END (227)15.8使用示例 (228)15.8.1抓取应用 (228)第16章传送带跟踪 (229)16.1参数设置 (229)16.1.1基本信息 (229)16.1.2识别参数 (230)16.1.3传送带标定 (230)16.1.4传感器标定 (233)16.1.5位置设置 (235)16.2编写程序 (236)16.2.1CONVEYOR_ON指令 (236)16.2.2CONVEYOR_OFF指令 (237)16.2.3CONVEYOR_CHECKPOS指令 (237)16.2.4CONVEYOR_CHECKEND指令 (237)16.3示例 (237)16.3.1使用传感器、MOVJ走轨迹 (237)16.3.2使用传感器、外部发点功能走轨迹 (238)16.3.3视觉传送带跟踪 (238)第17章外部传输点 (240)17.2通讯方式 (241)17.2.1点位存放的数据 (241)17.2.2示例 (242)17.2.3指令 (242)第18章外部通讯 (243)18.1TCP协议 (243)18.1.1参数设置 (243)18.1.2指令 (243)18.1.3READCOMM (244)18.1.4OPENMSG (245)18.1.5CLOSEMSG (245)18.1.6PRINT (245)18.1.7MSG_CONN_ST (245)第19章数据上传 (246)19.1基本设置 (246)19.2数据格式 (246)19.2.1生成csv文件示例 (247)第20章机器人日志 (249)20.1示教器日志查看 (249)日志说明 (249)操作日志:此类型日志保存用户的基本操作,例如新建程序、重命名程序插入指令等。
KL、SC系列快速门伺服控制系统使用说明书
工业快速门伺服控制系统使用说明书(210720版)使用产品前请仔细阅读本使用说明书,并妥善保存。
欢迎使用感谢您使用工业快速门伺服控制系统。
请在仔细阅读本使用说明书后再进行相关的操作。
本系统是一套设计精美、操作简单、功能丰富、稳定可靠的伺服控制系统。
系统采用4.3寸触摸屏,触控灵敏,功能丰富,菜单简洁,符合直觉。
系统集成了互锁、部分开门、时间锁、自动测试、防冻、中英文切换等实用功能。
每一个细节都精益求精,将常用操作化繁为简,第一次使用时即可轻松上手。
祝使用愉快!目录一、注意事项 (2)二、安装说明 (3)三、快速操作指南 (4)四、产品尺寸 (12)五、产品选型表 (14)六、系统功能与接口 (20)七、接线定义表 (21)八、接线示意图 (29)九、系统功能介绍 (53)十、日常维护 (59)十一、故障信息说明 (60)保修卡 (62)1一、注意事项以下为特别注意的事项:✠接线前,请确认输入电源已经切断,严禁带电操作。
✠请确认输入电源的电压与本系统的额定电压一致,且确保接线正确,接地良好。
✠控制器内部的电子器件对静电特别敏感,切勿私自拆卸或将异物置入其中。
✠系统通电后,严禁用手直接触摸输入输出端子。
✠严禁将24V电源输出端子短接或与外壳连接。
✠切断输入电源后,触摸屏显示熄灭前,表示系统内部仍有高压,请勿触摸内部电路,以防触电。
2二、安装说明以下为安装时需注意的事项:✠安装调试时,严禁门下站人或者行走。
✠门控系统必须进行可靠接地。
✠操作关闭门帘前,请确保门帘下方无障碍物,若有,请清理干净后操作。
✠非专业安装人员请勿私自进行安装,或在专业安装人员的指导下进行安装操作。
✠本系统支持手动式、地磁感应式、雷达式、指纹式、密码刷卡式、遥控式、拉绳式等多种开关门控制方式,请根据第七章接线定义表,外接所需设备。
34三、 快速操作指南KL 系列1、检查电源线、电机线、编码器线、刹车电源线等线缆是否接好,确认无误后,打开内部伺服控制器的电源开关(拨至“ON ”的位置,指示灯亮)。
西门子 NXGPro+ 控制系统手册_操作手册说明书
3.4
单元通讯的协议 ............................................................................................................ 36
3.5
NXGpro+ 高级安全 .......................................................................................................37
3.2
功率拓扑 ......................................................................................................................34
3.3
控制系统概述 ...............................................................................................................35
NXGPro+ 控制系统手册
NXGPro+ 控制系统手册
操作手册
AC
A5E50491925J
安全性信息
1
安全注意事项
2
控制系统简介
3
NXGPro+ 控制系统简介
4
硬件用户界面说明
5
参数配置/地址
6
运行控制系统
7
高级的操作功能
8
软件用户界面
9
运行软件
10
故障和报警检修
11
电子控制系统操作说明书

电子控制系统操作说明书一、简介电子控制系统是一种用于控制和监测电子设备运行的系统。
本操作说明书旨在帮助用户熟悉并正确操作电子控制系统,以确保设备的正常运行。
二、系统组成电子控制系统由以下几个主要组成部分构成:1. 控制面板:用于设定和调整各种参数,例如温度、湿度等。
2. 传感器:用于感知环境条件,并将数据传输给控制面板进行处理。
3. 执行器:根据控制面板发送的指令执行相应的动作,例如打开或关闭设备。
三、系统操作1. 开机和关机将电源插头插入电源插座,并将系统开关拨到"ON"档位,系统即可启动。
关闭系统时,将系统开关拨到"OFF"档位,并拔出电源插头。
2. 参数设定使用控制面板上的操作界面,根据需要设定各项参数。
例如,如果需要控制温度,可以通过调整温度设定值来实现。
3. 系统监测在系统运行过程中,可以通过控制面板的显示屏查看当前环境条件和设备状态。
如果发现异常情况,例如温度过高或设备故障,应及时采取相应的措施,确保设备正常运行。
4. 报警提示当系统监测到异常情况时,会通过声音或灯光等方式发出警报提示。
用户应及时注意,并根据提示信息采取相应的措施。
5. 执行器控制根据需要,可以通过控制面板对执行器进行控制。
例如,在温度过高的情况下,可以手动打开降温装置。
四、注意事项1. 请务必按照正确的操作步骤进行操作,避免人为失误导致设备故障或操作不当。
2. 在操作系统之前,请确保已经仔细阅读本操作说明书,并对系统有一个基本的了解。
3. 定期检查系统的连接线是否松动,以及设备是否正常工作,如有问题应及时维修或更换。
4. 禁止将不相关的物体放置在电子控制系统附近,以防造成设备故障或人身伤害。
5. 禁止未经授权的人员进行系统的维护和拆卸,以免发生意外事故。
五、故障排除如果遇到系统无法正常运行或其他故障情况,请参考以下排除故障的方法:1. 检查电源是否正常连接,并确保电源插座工作正常。
ArubaOS 8 控制器操作系统说明书

ArubaOS 8 控制器操作系统这个更为智能化的操作系统专为当今移动化的办公场所打造。
概述移动设备、物联网(IoT )和关键业务应用程序使移动工作人员能够提高生产力和效率,但这同时提高了他们对网络的需求。
ArubaOS 是所有Aruba 移动控制器、虚拟移动控制器、Mobility Master 和控制器管理的无线接入点的操作系统。
凭借广泛的集成技术和功能,ArubaOS 8提供统一的有线和无线接入、无缝漫游、企业级安全、以及始终在线的网络,交付所需的性能、用户体验和可靠性,以支持高密度环境。
Mobility Master 是Aruba 架构的一个新组件,使客户能够利用要求集中协调的高级功能,以及因移动和IoT 设备需求增加而扩展的网络。
它还可以替代主控制器的先前功能,并且可以部署为VM 或x86硬件设备。
Mobility Master 自动优化RF ,并在不太可能发生的控制器宕机故障中实现无中断故障转移。
Aruba 当前的移动控制器客户可以从ArubaOS 版本6升级到版本8,并立即受益于一些新特性和功能。
对于更高级的功能(例如第三方集成),客户需要在部署中添加Mobility Master 。
有关ArubaOS 8上详细功能的说明,请参阅此处提供的列表说明。
简化操作与在包含全局和本地配置的平面配置模型上操作的ArubaOS6相反,ArubaOS 8新的UI界面使用集中式多层体系结构,清晰地分离了管理、控制和转发功能。
Mobility Master和受管设备的所有配置都在一个集中的地点进行——这能够带来更好的可见性和监控能力,并能够简化配置流程,并最大程度避免重复作业。
ArubaOS 8中的新UI界面具有现代化的外观,采用快速化的工作流程,使用起来更为简单。
ArubaOS 8中的以下功能简化了网络操作:带池的集中许可:IT团队可通过来自Mobility Master或主控制器的集中式许可,在一个集中式位置管理所有许可证。
智能门禁管理控制系统用户使用手册说明书
用户使用手册User Guide智能门禁管理控制系统克立司帝控制系统(上海)股份有限公司Crest Control System(Shanghai)Co.,Ltd.目录第一节系统概述 (3)第二节布线及安装 (4)1、门禁布线说明 (4)2、门禁系统拓朴图——TCP/IP通讯方式 (5)3、门禁控制器联网 (7)3.1、TCP/IP通讯门禁控制器联网示意图 (8)4、单门双向控制器电气接线说明 (9)5、双门双向控制器电气接线说明 (9)6、四门单向控制器电气接线说明 (11)第三节硬件设备操作说明 (13)1、门禁控制器技术参数 (13)2、设备操作说明 (14)2.1门禁控制器操作说明 (14)2.2门禁常见故障与排除 (14)第一节系统概述克立司帝“智能门禁管理系统”以非接触式智能卡为出入介质,对主要通道进行控制管理。
所有门禁管理终端通过TCP/IP通讯方式与电脑连接,所有有效卡及用户权限通过软件下载至门禁管理终端,保证脱机、脱网状态下的人员刷卡正常出入。
智能门禁系统由电脑、发行器、管理软件、门禁控制器、读卡器、出门按钮、其他辅助设备等组成。
门禁控制器又分为:单门双向控制器、双门双向控制器及四门单向控制器,在同一系统中可同时存在这三种控制器,也可单独存在某一种控制器,施工过程中遵循就近原则来选择控制器。
门禁系统通过管理软件与门禁控制器互动,可完成如下强大功能:1丰富实用的报警模式:非法闯入报警、门长时间未关闭、非法卡刷卡报警、胁迫报警2强制关门、紧急开门3双门互锁4防潜回、防尾随设计5里外校验开门模式6支持多种识别设备:如:读卡器、指纹机、掌纹机、乱序密码、磁卡、条码、二维码等7灵活丰富的多时段设置8多种保护电路设计:多反馈电源保护、二级防雷防电涌设计,大负载继电器输出设计并带有瞬间过压保护,所有输入口光藕隔离。
第二节布线及安装1、门禁布线说明1.1管理中心服务器——管理工作站所有管理工作站的管理电脑通过交换机与服务器相连,线材选用:网线或光纤 服务器——发行器服务器接口通过USB连接发行器1.2管理工作站设备连接(1)TCP/IP通讯方式(如图一)管理工作站管理电脑——门禁控制器通过网线连接到交换机上,所有管理电脑通过分配给每个门禁控制器固定IP地址来识别和管理门禁控制器,通过交换机实现信息交换与共享门禁控制器——读卡器信号线线材选用:RVVP6*0.5mm2门禁控制器——电控锁电源线线材选用:RVV2*0.75mm2门禁控制器——开门按钮信号线线材选用:RVV2*0.75mm21.3设备供电所有读卡机供电为DC8~16V,线材选用:RVV2*0.75mm2电控锁供电为DC12V,线材选用:RVV2*0.75mm2接开门按钮线材选用:RVV2*0.75mm252、门禁系统拓朴图——TCP/IP通讯方式(图一)(图一)注解:1、图中以单门双向门禁控制器、双门双向门禁控制器和四门单向门禁控制器为例,展示了各种门禁控制器与读卡器及门锁和开门按钮的连接方式及关系;2、整个系统数据服务中心可连接不限数个基础单元管理工作站,所有管理工作站通过交换机与服务器连接,实现信息交换与共享;3、每个门禁控制器都支持TCP/IP通讯方式,针对不同的现场环境选择不同的门禁控制器,所有管理电脑通过分配给每个门禁控制器固定IP地址来识别和管理门禁控制器;4、所有系统中使用的卡片可集中到服务器上去发行。
凯视达控制系统 使用说明书
凯视达控制系统使用说明书版本: v3.0发布日期: 2021年9月安全注意事项警告●本设备非防水设备,在潮湿环境下请做好防水处理;●本设备禁止靠近火源或高温环境;●本设备如发出怪异噪音、冒烟或怪味,应立即拔掉电源插头,并与经销商联系;注意1、使用前请仔细阅读本说明书,并妥善保存以备后用;2、在有雷电或长期不用的情况下,请拔掉电源插头;3、本设备不适合非专业人员操作调试,请在专业人员指导下使用;4、不要从本设备通风孔塞入任何物体,以免造成设备损坏或事故;5、不宜将本设备放置于近水或其它潮湿的地方使用;6、不宜将本设备放置于散热片或其它高温地方使用;7、请妥善整理并放置好电源线,以防破损;8、如存在下列情况,应拔掉本设备电源插头,并委托维修:●有液体溅入本设备时●本设备跌落或机箱损坏时●本设备出现明显功能异常或性能明显变差时版本变更记录版本号时间版本变更详情V1.02018-1-1 1.完成金卡相关设置V1.12018-5-20 1.新增MFC相关设置软件建界面V2.02018-10-1 1.删除绿卡相关设置内容:2.新增亮度控制Gamma调节3.调整MF630的界面V2.12019-12-121、新增高级设置页面内容。
2、新增拼接亮暗线使用方法V3.02021-9-161、新增创意显示调试2、更新程序库3、更新模组库4、新增屏体监控内容5、专家调屏新增扩展功能6、新增带载提示功能目录1 软件介绍 (1)2 软件安装 (1)2.1 软件下载与安装 (1)2.2 硬件连接 (2)2.3 软件更新 (2)3 软件界面介绍 (3)4 屏幕配置 (4)4.1 向导调屏 (4)4.1.1 设置向导 (4)4.1.2 确认接收卡数量 (5)4.1.3 选择模组厂家及类型 (5)4.1.4 每张接收卡带载 (11)4.1.5 大屏点数 (12)4.1.6 接收卡串线方式 (13)4.1.7 高级效果设置 (17)4.1.8 固化系统参数 (17)4.2 专家设置 (18)4.2.1 发送设备 (19)4.2.2 接收卡 (21)4.2.3 显示屏连接 (26)4.2.4 固化参数 (29)4.2.5 其他参数处理 (30)5 亮度控制 (32)5.1 亮度设置 (32)5.2 色温调节 (33)5.3 Gamma调节 (34)6 相机校正 (36)6.1 逐点校正 (36)6.2 区域偏色校正 (37)7 屏体监控 (38)7.1 显示屏监控 (39)7.2 使用注意事项 (39)8 多功能卡 (40)8.1 电源管理 (40)8.2 监控数据 (43)8.3 亮度调节 (44)8.4 音频调节 (45)9 视频处理 (46)9.1设置和工具菜单 (46)9.2 模拟显示区 (48)9.3 属性参数设置 (48)9.4 控制台操作 (49)10 创意显示 (50)10.1 球形屏 (50)10.2 多边形屏 (51)10.3 平面造型屏 (52)10.4 圆形屏 (53)11 高级设置 (53)11.1 初始化发送卡参数 (54)11.2 初始化多功能卡参数 (54)11.3 升级金卡程序 (54)11.4 一键修复 (55)11.4.1 修复发送卡 (56)11.4.2 修复接收卡 (57)11.5 模组管理 (58)11.6 设置包间隔 (58)11.7 通信测试 (59)11.8 拼接亮暗线 (59)11.9 发送卡自动亮度调节 (61)11.10 检测设备程序版本状态 (62)11.11 加载程序库 (62)11.12 网线直连模式 (62)11.13 快速下载使能 (63)11.14 查询多功能卡使能 (63)12 更多功能 (63)12.1 图像测试工具 (63)12.2 更改软件语言 (64)12.3 换肤 (65)12.4 软件信息查看 (66)12.5 软件运行环境监测 (66)12.5 检测新版本 (67)1 软件介绍凯视达控制系统软件是专为凯视达主控系统的调试控制定制的软件,支持凯视达多合一类视频控制设备、发送卡、接收卡、多功能卡的调试。
Granity 一体化门禁管理控制系统用户使用手册说明书
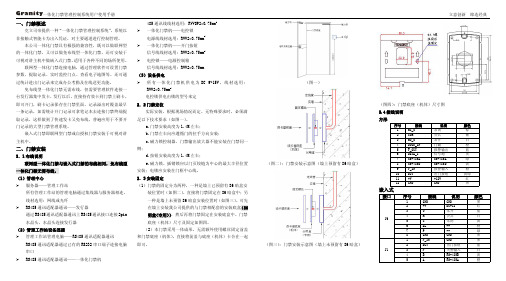
一体化门禁管理控制系统用户使用手册立意创新缔造经典一、门禁概述克立司帝提供一种“一体化门禁管理控制系统”,系统以非接触式智能卡为出入凭证,对主要通道进行控制管理。
本公司一体化门禁具有极强的兼容性,既可以做联网型的一体化门禁,又可以做免布线型一体化门禁,还可安装于可视对讲主机中做嵌入式门禁,适用于各种不同的场所使用。
联网型一体化门禁连接电脑,通过管理软件可设置门禁参数、提取记录、实时监控门点、查看电子地图等。
还可通过统计进出门记录来完成办公考勤及在线巡更功能。
免布线型一体化门禁无需布线,但需要管理软件连接一台发行器集中发卡,发行以后,直接持有效卡到门禁上刷卡,即可开门,刷卡记录保存在门禁里面,记录溢出时覆盖最早一条记录,如需统计开门记录可拿笔记本去连接门禁终端提取记录,这样做到了快速发卡又免布线,普遍应用于不要开门记录的大型门禁管理系统。
嵌入式门禁即联网型门禁或自授权门禁安装于可视对讲主机中。
二、门禁安装2.1布线说明联网型一体化门禁与嵌入式门禁的布线相同,免布线型一体化门禁无需布线。
(1)管理中心服务器——管理工作站所有管理工作站的管理电脑通过集线器与服务器相连,线材选用:网线或光纤RS485通讯适配器通讯——发行器通过RS485通讯适配器通讯上RS485通讯接口连接2pin 水晶头,水晶头连接发行器(2)管理工作站设备连接管理工作站管理电脑——RS485通讯适配器通讯RS485通讯适配器通过已有的RS232串口端子连接电脑串口RS485通讯适配器通讯——一体化门禁机485通讯线线材选用:RVVSP2*0.75mm 2一体化门禁机——电控锁电源线线材选用:RVV2*0.75mm 2一体化门禁机——开门按钮信号线线材选用:RVV2*0.75mm 2电控锁——电源控制箱信号线线材选用:RVV2*0.75mm (3)设备供电所有一体化门禁机供电为DC 9~15V ,线材选用:RVV2*0.75mm 2电控锁供电由锁的型号来定2.2门禁定位实际安装,根据现场情况而定。
TCR新系统说明书NEW

TCR 系统控制原理SVC 如图1接入系统中,滤波器FC 提供固定的容性无功Q C ,补偿电抗器提供感性无功。
只要能做到Q N =Q V -Q C +Q TCR =常数(或0),就能实现电网功率因数=常数,电网电压几乎不波动。
式中:Q N 为系统无功,Q V 为负荷无功。
补偿效果好坏的关键是准确控制晶闸管的触发角,得到所需的流过补偿电抗器的电流。
可控硅阀和控制系统能够实现这个功能。
采集电流和电压,求得补偿无功值,计算得触发角大小,通过晶闸管触发装置,使晶闸管流过所需电流。
TCR系统控制母线滤波器FC荷负图1.1 SVC系统组成简图补偿电抗器电纳值与电抗器的导通角有关。
当电抗器额定电感值确定后,控制电抗器的导通角可改变电抗器在工作电路中的等效电纳值。
补偿电抗器电纳值与导通角的关系如下:22sin 2a aBr wLππ-+=其中:α为电抗器触发角 L 为电抗器额定电感值改变电抗器的导通角是用可控硅实现的。
如图2所示,控制可控硅的触发角来改变电抗器的导通角。
当触发角增大时,电抗器的电纳值增大,补偿功率减小。
图 2 中 I 为电抗器电流,它随触发角α的增大而减小。
TCR 控制系统完成如下功能:通过检测系统电压、电流和TCR 的电流,计算出可控硅的触发角,控制电抗器电纳值,达到无功补偿的目的。
对于不对称负荷,应用分相调节。
TCR 分相调节的理论基础为STEINMETZ 理论,此理论的前提是系统电压为平衡对称的。
从这个前提出发,补偿后理论上负荷是纯有功、平衡的。
STEINMETZ 理论给出多种补偿表达形式,本系统采用无功功率平均值表示的补偿电纳公式:()()()2()()()2()()()211()331()3311()33ab r bc a l ca b l ab c l Tbcr ab c l ca b l bc a l T car ab c l bc a l ca b l T B v i v i v i dt T V B v i v i v i dt T V B v i v i v i dt T V =⨯⨯+⨯-⨯=⨯+⨯-⨯=⨯⨯+⨯-⨯⎰⎰⎰其中:Br ab,Br bc,Br ca分别为△形连接的补偿电抗器电纳值V为系统电压有效值Vab,Vbc,Vca为系统线电压瞬时值ia(l),ib(l),ic(l)为负荷电流瞬时值T为采样周期10msTCR的分相调节控制系统能做到补偿后各项指标均达到国家标准,并满足用户要求。
1900B 电脑套结机控制系统使用说明书
1900B电脑套结机控制系统使用说明书前言欢迎您使用中捷公司生产的电脑套结缝纫机。
请您仔细阅读本说明书,以确保正确的操作使用电脑套结缝纫机,请按照本说明书内注明的方式进行操作,否则,如违规操作所造成损失本公司不承担责任。
此外,请将本说明书妥善保存在安全地点,以便随时查阅,若发生故障须由本公司指定的技术人员或专业人员进行维修。
目录1概要说明 (1)1.1应用机型 (1)1.2输入方式 (1)1.3显示方式 (1)1.4面板布局 (1)1.5标准化 (1)1.6操作方式 (1)2操作说明 (2)2.1控制面板开关名称和说明 (2)2.2基本操作 (3)2.2.1项目数据的设定 (3)2.2.2花样形状的确定 (5)2.2.3缝制 (6)2.2.4变更为其它花样 (6)2.2.5绕线 (7)2.2.6独立剪线装置 (7)2.2.7抓线装置 (7)2.2.8底线计数器 (8)2.2.9暂停 (9)2.3设置P花样与C花样 (10)2.3.1使用花样键()进行缝制 (10)2.3.2使用组合功能的缝制 (12)2.4调试模式 (14)2.4.1CP-1(输入信号检验) (16)2.4.2CP-2(检验X、Y马达/原点传感器) (17)2.4.3CP-3(连续运转) (18)2.4.4CP-4(检验主马达转速) (19)2.4.5CP-5(切线调节) (20)2.4.6CP-6(检验压脚、切线马达/原点传感器) (21)2.4.7CP-7(检验抓线马达/原点传感器) (22)2.5设置参数 (23)2.5.1设置参数的具体操作 (23)2.5.2设置参数的设定举例 (24)2.5.3用户参数设置表 (28)3服务参数设置 (29)3.1服务参数的开启和变更 (29)3.2服务参数列表 (30)3.3恢复出厂默认设置 (31)3.3标准图案一览表 (33)4钉扣功能 (37)4.1钉扣功能设定 (37)4.2钉扣标准花样一览表 (38)5附录 (40)5.1异常信息一览表 (40)5.2系统框图 (42)1概要说明1.1应用机型SC201加固机型。
(整理)富士FFA电梯控制系统使用说明书.
符号
显示色
灯亮条件
PWR
绿
电源指示灯,该CPU模块电源接通时灯亮(内部电源正常时)
RUN
绿
运行指示灯,该CPU模板运行时灯亮。(运行程序进行时)
停止时(也包括致命错误停止)灯灭。
ALM
红
错误指示灯,该CPU模板出现非致命错误或致命错误时灯亮。
*非致命错误:RUN灯亮/ALM灯亮
12.安全回路信号:常开信号,安全回路正常时应保持接通
13.门锁信号:门关好时信号接通
14.变频器检测信号:常闭信号,变频器正常时信号接通
15.运行信号:见注释4
16.关门延时信号:按钮信号
17.消防输入信号:开关常闭点信号,断开为选择消防功能
18.锁梯输入信号:开关常开点信号,接通信号为选择锁梯功能
较少的集成电路,加上全新的电梯控制编程方法,NW3P08-41C(42C)实现了简单则可靠、简单则低价、简单则易维护等设计要求。
微机各功能器件模块式集中布局,电路原理一目了然,具有极高的抗干扰能力。整板设计美观,接线方便。NW3P08-41C(42C)用户可自行编制电梯程序,并且三级密码保护功能。
由于有以上的优点,NW3P08-41C(42C)微机自推出以来赢得众多用户使用和好评,是一款性价比极高的微机。
第二章系统各器件介绍
2.1中央处理板(NW3P08-41C(42C))和I/O接口板(NW3W05606R)介绍
2.1.1中央处理板(NW3P08-41C(42C))和I/O接口板(NW3W05606R)端口定义
中央处理板(NW3P08-41C(42C))和I/O接口板(NW3W05606R)的各端口视图如下:
28.开关门限位开关保护功能
程序控制器T200系统说明书

Programmable ControllersT200 System consisting of the following:Programmable Controllers, Open Type, Series Advant Controller 31, Basic Unit Models 07 KT 91, 07 KT 92, 07 KT 93, 07 KT 93-S, KT 94-S, KT 95-S, KT 96-S, KT 97-S, KT 98-S, 07 KT 94, 07 KT 95, 07 KT 96, 07 KT 97, 07 KT 98, may be provided with letters A to Z to denote software changes.Programmable Controllers, Open Type, AC500 and S500 Series , Terminal Base Models TB511-ARCNET, TB511-ETH, TB711F, TB521-ARCNET, TB521-ETH, TB541-ARCNET, TB541-ETH; Terminal Unit Models TU505, TU506, TU515, TU715F, TU516, TU531, TU532, TU552-CS31, TU551-CS31, TU541, TU542, TU716F, TU731F, TU732F; CPU Unit Models PM571, PM571-ETH, PM571-ARCNET, PM581, PM581-ETH, PM581-ARCNET, PM783F, PM582 may be followed by -ARCNET or -ETH, EC581-ARCNET, PM591 may be followed by -ARCNET or -ETH; BCU06-ETH; Communication Coupler Modules CM572-DP, CM575-DN, CM574-RS, CM577-ETH, CM578-CN, CM579-PNIO, CM579-ETHCAT; Analog Input/Output Module Model AX522, AX722F, AX521, AO523, AO723F, AI523, AI531, AI731F, AI723F, AC522; Digital Input/Output Modules DX522, DX722F, DX731F, DX531,DC532, CI502-PNIO, CI512-ETHCAT, DC732F, DC541-CM, DC523; DC522, CD522; Digital Input Module Model DI524; Decentral I/O Module DC505-FBP, DC551-CS31, DC551-08L1 or CI592-CS31; Analog and Digital Input/Output Module Models CI590-CS31, CI501-PNIO, CI511-ETHCAT.Accessories for AC500 and S500 series: MC502, TK501, TK502, TA521, TA523, TA524, TA525, TA526, TA724.Communications modules , Model 07 KP 90, 07 KP 92, 07 KP 93, 07 KP 94 or 07 MK 92; Model 07 KP 95 or 07 TC 91 for use with 07 KR 91, 07 KT 92, 07 KT 93, 07 KT 94, 07 KT 95, 07 KT 96 or 07 KT 97.Model PDQ22.Analog Input Modules , Model 07 AI 91, 07 AI 90-S.Digital Input/Output Modules , Model 07 DC 91, 07 DC 92.Digital Input Modules , Model 07 DI 92, 07 DC 92.Analog Input/Output Module , Model 07 AC 91.Digital Output Module , Model 07 DO 90-S.Fieldbuses , Cat. Nos. AS, COP21, DNP21, PDP21, MRP21, PDP-22, PDP22-FBP may be followed by additional suffix. All Cat. Nos. followed by RX, may be followed by XX, where X is any number 1-9 incl.Copyright © 2009 Underwriters Laboratories Inc.®NRAQ.E134045Programmable Controllers Page Bottom See General Information for Programmable ControllersABB INCE1340451206 HATTON RDWICHITA FALLS, TX 76302 USA Last Updated on 2009-03-11Questions? Notice of Disclaimer Page TopThe appearance of a company's name or product in this database does not in itself assure that products so identified have been manufactured under UL's Follow-Up Service. Only those products bearing the UL Mark should be considered to be Listed and covered under UL's Follow-Up Service. Always look for the Mark on the product.UL permits the reproduction of the material contained in the Online Certification Directory subject to the following conditions: 1. The Guide Information, Designs and/or Listings (files) must be presented in their entirety and in a non-misleading manner, without any manipulation of the data (or drawings). 2. The statement "Reprinted from the Online Certifications Directory with permission from Underwriters Laboratories Inc." must appear adjacent to the extracted material. In addition, the reprinted material must include a copyright notice in the following format: "Copyright © 2009 Underwriters Laboratories Inc.®"。
电气控制系统使用详细说明书

宁波海港76 米打桩船电气控制系统安装、运行、维护、使用说明书1、概述宁波海港76 米打桩船电气控制系统用于控制全船的8 个移船、2 个主吊、1 个副吊、起落架、吊锤液压绞车、桩架变幅油缸及抱桩油缸液压系统。
本电气系统由主控制台、左/右舷副控制台、8 只移船绞车机旁控制箱、液压站状态箱、应急油泵控制箱、便携式变幅盒、 2 只杂用绞车控制盒、前甲板设备控制箱及抱桩机便携式控制箱组成。
主控制台主要控制 2 台主吊桩绞车、 1 台副吊桩绞车、 1 台吊锤绞车、1台起落架绞车及1台变幅油缸;左/右舷副控制台主要是对8 个移船绞车进行集中控制1〜8#移船绞车,移船绞车机旁控制箱分别对8台绞车进行机旁控制;液压站状态箱主要显示液压站的控制信号与装置信号;应急油泵控制箱在设备维修、调试及特殊情况下控制应急油泵;便携式变幅箱可对变幅油缸进行倒架与微动控制;1〜2#杂用绞车现地控制盒;前甲板设备控制箱和便携控制盒对抱桩机油缸进行控制。
2、组成本电气控制系统所有设备的控制台、箱体均采用美国威图公司的产品,防护等为IP65。
系统采用德国西门子公司S7—300系列的PLC作为控制中心,I/O 点具有光电隔离,本控制器控制可靠,故障率低,各子站通过Profibus-DP 总线进行通讯。
系统配备了日本天任公司ST400 触摸屏对设备的压力值进行显示。
操作手柄与比例放大装置采用力士乐(德国)公司的产品,来对应控制不同的阀组。
开关电源采用德国西门子公司产品,空气开关、信号灯、按钮等元器件采用美国ABB等公司产品。
3、产品用途本电气控制系统主要通过“集控”、“现地”两种操作方式,对全船的各类液压绞车、桩架变幅及抱桩油缸液压系统进行控制,主要完成的功能有:1)起重类绞车的升降控制、过卷/过出/过载/过高保护;2)吊锤绞车锤升降和打桩功能,过卷/过出/过高保护,及打桩工况时下落速度过高保护;3)移船绞车收、放钢缆,实行移船定位控制,有过卷/过出保护,及刹车、离合器控制;4)各类绞车无级调速(快速/慢速);5)抱桩油缸同步/分步的抱紧与松开控制;6)变幅油缸控制;7)应急油泵控制,过载保护;8)各指示灯可通过试灯按钮检测信号灯故障;9)油箱油位低、过低报警,及油位过低紧急停柴油机功能;10)油箱油温过高、过低报警,及油温可以通过手动/自动控制;11)滤油器堵塞报警,及滤油器切换保护;4、设备安装4.1根据端子图、接线图及原理图将控制箱(盒)、液压泵站接线端子盒连接好,保证接线正确无误。
工业快速门伺服控制系统PE500 使用说明书

工业快速门伺服控制系统使用说明书336000071 V1.3 2目 录一、序言 (1)二、交货检查 (2)三、标准规格 (2)四、机械安装及尺寸 (4)五、电气安装 (6)六、产品操作 (10)七、高级电气安装 (19)八、产品保养 (22)九、故障代码说明 (23)一、序言感谢您使用工业快速门伺服控制系统。
请在仔细阅读本产品手册后再进行相关的操作。
本手册主要为用户提供可以正确使用和维护的相关指导和说明,手册中涉及到设备的参数设定、异常诊断、排除及日常维护等。
以下为特别注意的事项:安装任何部件或接线前,都必须完全切断电源10分钟以上,且电路板上的LED灯已完全熄灭再操作!切勿带电操作!控制器和电机驱动器必须安全接地,请在标有“PE”和处接地,接地线径为3.5mm²以上铜线,接地电阻小于10Ω。
系统出厂前已通过耐压测试,用户不可再对系统进行耐压测试。
控制器与电机之间不可加装电磁接触器和吸收电容或其它阻容吸收装置。
自行拆开控制器内箱所造成的破坏,本公司不承担免费维修责任。
勿湿手操作,请戴绝缘手套操作!勿用手触碰按键绝缘部分外的器件及焊点!安装电机组时,门轴需要完全穿过减速机。
安装、调试和开闭门时,严禁门下站人或行走。
操作关闭门帘之前,应先检查门帘下方是否有阻碍物,若有,必须清理干净。
本公司保留任何适当的技术、 生产和商业化修改的权利,同时产品 基本特点并不改变。
二、交货检查每套设备在出厂前,均经严格的品管。
开箱时,请认真确认:在运输中是否有破坏或刮伤损坏现象,本机铭牌的额定值是否与您订货要求相一致。
三、标准规格1.控制器规格参数型号 PE500箱体材料 ABS塑料 冷轧钢板尺寸(长x宽x高)340x198x143 400x250x175 mm安装方式 垂直安装,无振动输入电源电压 单相 AC200-240 V输入电源频率 50/60 Hz最大输出功率 1.5 KW对外部设备供电能力24 VDC 0.5 A工作温度 -10~+50 ℃存储温度 -20~+55 ℃环境湿度 30%-85%,无凝露防护等级 IP54 IP42使用场所 室内,不受阳光直射,无尘埃,腐蚀性气体,油雾,水蒸气等重量(净重) 1.7 4.5 Kg2.驱动器规格参数:型号 PE200 PE500尺寸(长x宽x高)440x110x180 522x130x200 mm 输出额定功率 0.75 1.5 KW 输出额定转速 2,000 RPM 输出额定转矩 3.59 7.2 Nm 输入电源电压 单相AC220 V输入电源频率 50/60 Hz 输入电流 6.5 13 A工作温度-10~+40(+40~+50降额一半使用) ℃ 存储温度 -20~+55 ℃ 环境湿度 30%-85%,无凝露防护等级 IP54限位模式 绝对值编码器、接近开关自锁方式 电子机械刹车手动释放 手柄、电池(选配)净重 10.2 (配RV50减速机) 17 (配RV63减速机) Kg四、机械安装及尺寸尺寸五、电气安装子形端子名称 说明 端子规格电源L 交流电源输入,火线(L)、零线(N)通过小型断路器进行控制单相AC200-240V,50/60Hz NPE电源L1 和驱动器的主电源输入(L1、N1、PE)连接或连接其它AC220V设备输出电压AC220V,负载≤13A N1PE六、产品操作1.操作功能介绍本公司所有生产的伺服控制系统,有如下操作方式可供选择:控制器操作、 点动升降、连续升降、紧急停机、单面操作盒操作、延时操作、雷达操作及地磁操作等。
kf500a新风控制面板说明书
kf500a新风控制面板说明书KF500A新风控制面板说明书一、产品介绍KF500A新风控制面板是一款用于控制新风系统的智能设备。
它采用先进的技术和设计,为用户提供便捷、舒适的室内环境。
本控制面板具有多种功能,包括温度调节、湿度调节、定时开关、风速调节等,可满足用户对新风系统的各种需求。
二、外观与安装KF500A新风控制面板外观简洁美观,采用高质量的材料制作而成。
面板尺寸适中,易于安装在墙壁上。
安装时需注意面板与墙面的垂直度,以保证整体效果美观。
三、功能说明1. 温度调节:KF500A新风控制面板可根据室内温度自动调节新风系统的运行状态,保持室内温度舒适宜人。
用户可根据自身需求设置温度范围,控制面板将根据设定的温度进行自动调节。
2. 湿度调节:KF500A新风控制面板还具备湿度调节功能,可根据室内湿度自动调节新风系统的湿度输出。
用户可根据需要设置湿度范围,控制面板将根据设定的湿度进行自动调节,保持室内湿度在舒适范围内。
3. 定时开关:KF500A新风控制面板具备定时开关功能,用户可根据需要设置新风系统的开启和关闭时间。
通过合理设置定时开关,可以在用户离开或睡眠时关闭新风系统,节省能源同时保证室内空气质量。
4. 风速调节:KF500A新风控制面板支持多档风速调节,用户可根据需求选择合适的风速档位。
高档位可快速通风,低档位可保持室内空气流动,满足不同季节和使用场景下的需求。
5. 智能模式:KF500A新风控制面板还具备智能模式功能,用户可选择智能模式后,控制面板将根据室内环境自动调节新风系统的运行状态,保持室内空气质量在较好状态。
四、操作说明1. 开关机:KF500A新风控制面板的开关机按钮位于面板顶部,用户可通过按下该按钮实现开关机操作。
2. 温度调节:KF500A新风控制面板的温度调节按钮位于面板正中央,用户可通过按钮上下调节温度。
3. 湿度调节:KF500A新风控制面板的湿度调节按钮位于面板右侧,用户可通过按钮上下调节湿度。
天津华宁KTC101说明书
天津华宁KTC101说明书天津华宁 KTC101 是一款广泛应用于煤矿井下的综合控制系统,为保障煤矿生产的安全和高效运行发挥着重要作用。
以下将为您详细介绍其相关信息。
一、系统概述KTC101 系统主要由控制中心、各类传感器、执行器以及通信线路等组成。
它采用了先进的计算机技术和通信技术,能够实现对煤矿井下设备的集中控制和监测。
该系统具有可靠性高、稳定性强、操作简便等优点。
通过实时采集和处理各种数据,为操作人员提供准确的设备运行状态信息,以便及时发现和解决问题。
二、主要功能1、设备控制功能可以对采煤机、刮板输送机、皮带输送机等主要设备进行远程控制,实现启停、调速等操作。
支持多种控制模式,如手动控制、自动控制和联锁控制,以满足不同的生产需求。
2、监测功能实时监测各类设备的运行参数,如电压、电流、温度、压力等。
对环境参数进行监测,包括瓦斯浓度、一氧化碳浓度、风速等,确保井下环境安全。
3、故障诊断与报警功能能够自动诊断设备故障,并及时发出报警信号。
显示故障类型、位置和相关信息,方便维修人员快速定位和处理故障。
4、数据存储与分析功能系统会自动存储设备运行数据和故障信息,便于后续的查询和分析。
通过对数据的分析,可以优化设备运行参数,提高生产效率。
三、技术参数1、工作电压:_____2、工作频率:_____3、通信方式:_____4、传感器精度:_____5、控制响应时间:_____四、系统组成1、控制中心是整个系统的核心,负责数据处理、控制指令下达等工作。
配备有高性能的计算机和专业的控制软件。
2、传感器包括各类物理量传感器和环境监测传感器。
传感器的精度和可靠性直接影响系统的监测效果。
3、执行器接收控制中心的指令,执行相应的动作。
如电机启动器、阀门控制器等。
4、通信线路负责传输数据和指令,确保系统各部分之间的通信畅通。
五、安装与调试1、安装前的准备工作确定安装位置,保证环境符合设备要求。
检查设备及配件是否齐全、完好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
1控制器型号及尺寸说明 (1)
1.1 控制器型号说明及标准规格 (1)
1.1.1 控制器型号说明 (1)
1.1.2 控制器标准规格 (1)
2控制器的接线 (1)
2.1 基本运行配线连接 (1)
2.2 主回路端子的连接 (2)
2.3 控制板端子的连接 (3)
2.3.1 输入控制端子 (3)
2.3.2 输出端子 (4)
3控制器的面板操作及参数说明 (5)
3.1 操作面板说明 (5)
3.2 参数说明 (5)
3.3 调试说明 (11)
3.3.1 行程开关模式 (11)
3.3.2 编码器模式 (11)
4故障代码及说明............................................... 错误!未定义书签。
1 控制器型号及尺寸说明
1.1 控制器型号说明及标准规格
1.1.1 控制器型号说明
图1—1 控制器的型号1.1.2 控制器标准规格
2 控制器的接线
2.1 基本运行配线连接
AGK20M控制器基本配线图如图2-1所示:
图2-1 AGK20M控制器基本配线图
注意:输入端子默认为常开输入,接线时如有常闭输入开关,请通过参数F-20,把相应的端子设成常闭;上升按钮和下降按钮只能为常开输入;急停默认为常闭输入。
2.2 主回路端子的连接
表2-1 控制器主电路端子名称及功能描述
2.3 控制板端子的连接
2.3.1 输入控制端子
表2-2 输入控制端子端子功能说明
端子接线注意事项
请使用多芯屏蔽电缆或绞合线连接控制端子。
使用屏蔽电缆时,电缆屏蔽层的近端(靠控制器的一端)应连接到控制器的接地端子PE。
布线时控制电缆应充分远离主电路和强电线路(包括电源线、电机线、继电器、接触器连接线等)20cm以上,并避免并行放置,建议采用垂直布线,以防止由于干扰造成控制器误动作。
2.3.2 输出端子
表2-3 CN5 端子功能说明
3 控制器的面板操作及参数说明
3.1 操作面板说明
AGK20M控制器的键盘操作面板,主要由LED数码管、LED指示灯和按键三个部分组成,其外形及各功能区如图3—1所示。
图3—1 操作面板(键盘)示意图
3.2 参数说明
控制器功能参数如表3—2所示
表3—2 控制器功能参数表
FA组
F0组
F1组
F2组
F4组
F5组
F7组
Fb组多段速控制组
FC组串行通讯组
3.3 调试说明
3.3.1 行程开关模式
将参数FA.00设成0行程开关模式(出厂默认),按照图2-1安装接线正确后即可使用。
通过调整参数FA.01~FA.11 优化开关门过程。
3.3.2 编码器模式
1、将参数FA.00设成1(编码器模式),按照图2-1安装接线,此时X1、X2端子
接编码器A、B信号(编码器未连接时,控制器在运行过会报警,显示“ECdE”)。
2、编码器学习:把参数FA.13设成0(学习),参数F7.06设成7(监视门行程计数),
完成编码器方向,总门高度对应编码器脉冲数的学习。
(1)、编码器方向学习:按上升按钮时,门行程脉冲数值应该增加;相反,按下降按钮时,门行程脉冲数值应该减小;如果相反,可以交换X1、X2端子接线或设定
参数FA.14为1。
(2)、总门高度的学习:按下降按钮,当门下降到下限位置时松开下降按钮,然后按下急停和下降按钮,5秒钟后门行程脉冲数值自动清零,显示“CLr”。
再按上升
按钮,到达上限位置时松开上升按钮,然后按下急停和上升按钮,5秒钟后控制
器自动记录当前门行程计数,显示“End”。
用户也可以手动设定参数FA.15调
整门行程计数。
控制器会按照参数FA.16、FA.17、FA.18的设定值,自动计算
下限位、中限位和上限位。
(3)、上下限位自动智能修正:限位设定完成后,改动参数FA.13=1,变为自动模式。
第一次开关门运行时,可能会未达到设定限位,此时控制器自动识别限位误差
距离,修正上下限位点,当第二次作开关门运行时,自动准确到达设定位置。
3.3.3 绝对值编码器模式
将参数FA.00设成2(绝对值编码器模式),相比编码器模式,要增加设定绝对
值编码器内部参考点设定的步骤。
在急停状态下,同时按住上升和下降键5s后,显示set即完成,接下来再进行以下步骤请参考编码器模式的步骤2和3。