基于单片机的安全距离控制系统设计
基于单片机的自动门设计
基于单片机的自动门设计一、自动门的工作原理自动门的工作原理主要基于传感器的检测和单片机的控制。
通常,会在门的两侧安装红外传感器或微波传感器,用于检测人员的接近和离开。
当传感器检测到有人接近时,会将信号发送给单片机。
单片机接收到信号后,经过处理和判断,控制电机驱动电路,使电机转动,从而带动门的开启。
当人员通过后,传感器检测不到人员,单片机再次控制电机,使门关闭。
二、系统硬件设计(一)单片机选择在本设计中,选择了 STC89C52 单片机作为控制核心。
这款单片机具有性能稳定、价格低廉、易于编程等优点,能够满足自动门控制的需求。
(二)传感器模块选用红外传感器来检测人员的进出。
红外传感器通过发射红外线并接收反射回来的红外线来判断是否有人员。
当有人经过时,反射的红外线强度会发生变化,传感器输出相应的电信号。
(三)电机驱动模块为了驱动自动门的电机,采用了 L298N 电机驱动芯片。
L298N 能够提供较大的电流输出,满足电机的工作要求,并且具有良好的稳定性和可靠性。
(四)电源模块整个系统需要稳定的电源供应。
选择了合适的稳压芯片,将输入的市电转换为单片机和其他模块所需的 5V 和 12V 直流电源。
三、系统软件设计(一)主程序流程系统上电后,首先进行初始化操作,包括单片机内部寄存器的设置、传感器和电机驱动模块的初始化等。
然后进入主循环,不断检测传感器的信号,根据信号状态控制电机的转动。
(二)传感器信号处理当传感器检测到人员接近时,单片机读取传感器的输出信号,并进行滤波和去噪处理,以确保信号的准确性和稳定性。
(三)电机控制算法为了实现门的平稳开启和关闭,采用了适当的电机控制算法。
例如,在门开启和关闭的过程中,逐渐增加或减小电机的转速,避免门的突然启动和停止。
四、系统调试与优化(一)硬件调试在硬件组装完成后,首先进行硬件调试。
检查各个模块的电源供应是否正常,传感器的输出信号是否准确,电机驱动电路是否能够正常工作等。
基于单片机的测距仪的设计

摘要本科生毕业论文(设计)题目:基于单片机的测距仪的设计学生姓名:张学武学号: 201211020226专业班级:电信12102班指导教师:蔡剑华曾高秋完成时间: 2015年5月目录摘要:本文设计了以AT89C52单片机为核心控制单元的超声波测距仪,文章概述了超声波检测的发展及基本原理,介绍了超声波传感器的原理及特性。
利用超声波检测往往比较方便、迅速、计算简单、易于做到实时控制。
该系统主要由蜂鸣器模块、超声波发送模块、超声波接收模块、显示模块四个模块构成。
利用超声波传感器对前方物体进行感应,经单片机对超声波传感器发送和接收的 (1)声波信号进行分析和计算处理,最后将处理结果在LCD1602上显示 (1)引言 (2)1概述 (2)1.1研究背景 (2)2设计要求 (3)3设计方案论证 (3)3.3超声波测距原理 (5)4设计总体方案 (5)4.1总体设计思路 (6)4.2显示部分 (6)4.3按键部分 (6)5硬件电路 (7)5.1功能与原理 (7)5.2资源分配 (8)5.3超声波发送电路 (8)5.4超声波接收电路 (8)5.6复位电路 (11)5.7外部时钟 (12)5.8按键电路 (12)5.9报警电路 (12)5.10温度检测电路 (13)5.11显示接口电路 (14)6软件设计 (15)6.1主程序流程图 (15)6.2超声波发送流程图 (16)6.3 LCD显示流程图 (16)6.4温度读取流程图 (17)7系统仿真 (18)7.1仿真电路图 (18)7.2仿真结果输出 (18)8结论与展望 (20)答谢:首先非常感谢指导老师蔡剑华和曾高秋的精心指导和严格要求,让我充分利用所学的理论知识去完成论文的设计,论文的完成让我极大地提高了实践能力,并对当前电子领域的研究状况和发展方向有了一定的了解,尤其是单片机领域,这对我今后进一步从事电子行业有着极大的帮助。
另外,此次毕业设计还获得了其他老师和同学的大力支持。
基于单片机的车辆安全预警系统设计
基于单片机的车辆安全预警系统设计发布时间:2023-01-15T09:15:11.933Z 来源:《科学与技术》2022年第8月第16期作者:那家瑶[导读] 近年来,汽车已经成为了大多数人出行的必备方式,而人们对汽车的预警系统也越来越重视。
本次设计介绍了一种基于单片机的车辆安全预警系统,预防由于车速过快或车距过近引发的交通事故,系统具有危险预警、自动减速的功能,可大大降低事故率, 提高汽车驾驶的安全性。
那家瑶(辽宁师范大学海华学院公共教学部:辽宁庄河:116400)摘要:近年来,汽车已经成为了大多数人出行的必备方式,而人们对汽车的预警系统也越来越重视。
本次设计介绍了一种基于单片机的车辆安全预警系统,预防由于车速过快或车距过近引发的交通事故,系统具有危险预警、自动减速的功能,可大大降低事故率, 提高汽车驾驶的安全性。
此系统以单片机作为核心,由超声波发射电路、接收电路、温度测量电路、显示报警电路等组成。
每个模块与单片机相连有单片机统一发出指令协调工作。
相关部分在系统的硬件设计部分给出了系统构成、电路原理及程序设计。
软件部分主要包括系统的主程序,超声波发送子程序及定时中断子程序、测温子程序、距离计算子程序、显示子程序、报警子程序等。
软件部分给出了主要的流程图和主要的程序编写。
关键词:单片机;超声波测距;报警显示;温度补偿第1章绪论1.1 课题研究背景及意义随着出行方式的日益便捷,汽车数量的不断增多,提高交通安全也逐渐成为社会所关注的重点话题。
如何更好的提高交通安全,现如今,许多汽车制造商正尽一切努力保护司机和乘客的安全,比如采用安全气囊保护或者安全带保护等等,但这些只是被动的防御安全事故,不能完全保证在事故来临时这些被动防御能有及时有效的保证司机和乘客的安全。
相比来说,预防事故比防御事故更可靠。
因此,车辆安全预警系统设计是极为重要的。
本设计是一种基于单片机的车辆安全预警系统,对于因司机看手机、聊天等外界干扰导致的车祸,针对性开发了一种基于单片机的车辆安全预警系统,预防由于车速过快或车距过近的安全事故,具有较强的实际应用意义。
基于单片机的GPS设计

基于单片机的GPS设计随着科技的快速发展,单片机已经成为现代电子技术中不可或缺的一部分。
为了更好地了解单片机的发展和应用,我们需要研究相关的外文文献,对于非母语读者来说,中文翻译也是必不可少的。
本文将介绍一些重要的单片机的外文文献和对应的中文翻译。
"Microcontroller Fundamentals" by John M. Hughes. This book provides a comprehensive introduction to microcontrollers, including their history, architecture, programming, and applications. It is an excellent resource for anyone who wants to learn about microcontrollers."Embedded Systems: A Perspective on MCU and SoC" by Yatin Chaudhary. This book provides an overview of embedded systems, including a detailed discussion on microcontrollers and system-on-chip (SoC) technology. It is a valuable resource for engineers and researchers in the field of embedded systems. "8051 Microcontroller: Architecture, Programming, and Applications" by K.K. Ray and M.K. Dash. This book provides a comprehensive guide to the 8051 microcontroller, including itsarchitecture, programming, and applications. It is an essential resource for students and professionals who want to learn about the 8051 microcontroller.《单片机基础》——李晓明译。
一个基于STM32单片机的实验室智能安防系统的设计与测试

一个基于STM32单片机的实验室智能安防系统的设计与测试作者:张玲杨仁桓来源:《电脑知识与技术》2024年第08期摘要:针对高校实验室的安防需求,需要能够及时消除安全隐患,最大限度减少实验室安全事故,保障校园安全、生命安全和财产安全。
文章设计了一套基于STM32单片机的物联网实验室智能安防系统。
该安防系统选用STM32F103C8T6作为主控芯片,各传感器将采集的数据通过Wi-Fi模块上传至机智云平台,实时监测实验室的温湿度、非法闯入、火情、烟雾等情况,对环境实施精准监控。
同时,该系统可满足人机交互,使用者能够下发相应的指令,对相关下位机模块进行控制,使得系统更加智能化,能有效降低实验室的安全风险。
关键词:实验室;STM32;安防系统;传感器;物联网中图分类号:TP393 文献标识码:A文章编号:1009-3044(2024)08-0060-04开放科学(资源服务)标识码(OSID)0 引言近年来,随着高等教育的快速发展,越来越多的院校相继建设专业实验室。
然而,相比于硬件的大力投入,管理方面仍然存在不足。
部分实验室的管理还不够完善,实验室安全防范未受到足够的重视。
尤其是近几年来国内发生的几起严重的实验室事故,给单位和个人造成了巨大的损失,为院校的实验室安防建设敲响了警钟。
实验室内一般具有较多的操作设备,必须严格遵守电气作业操作规程。
电路、电线、开关、插座的安全要求较高,须满足仪器设备的功率需求。
疏忽操作容易导致火灾。
实验室的各类电子精密设备和仪器价格昂贵,对环境温湿度要求也较高。
实验室具有空间较大,实验仪器和实验平台较为分散的特点,实验人员进行实验操作的时间具有一定的随机性。
这些不确定的因素给实验室环境监测带来了一定的挑战。
针对实验室的这些特点,本文设计了一款基于STM32单片机的实验室智能安防系统。
该系统利用各种类型的传感器模块采集环境相关数据,并实时监控环境参数。
通过手机端和OLED显示屏端载体,系统可以直观地显示监测结果。
车辆测距及智能控制系统
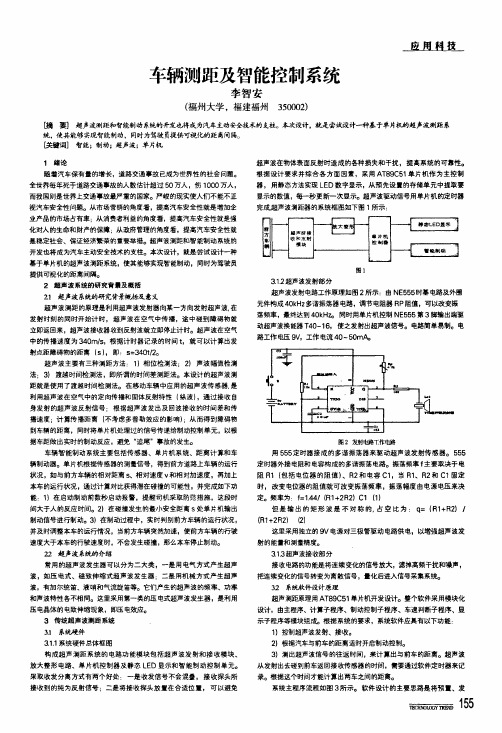
车辆测距及智能控制系统李智安(福州大学,福建福州350002)廛围抖蕉瞒要]超声波测距和智能制动系统的开发也将成为汽车主动安全技术的支柱。
本次设计,就是尝试设计—种基于单片机的超声波测距系统,使其能够实现智能制动,同时为驾驶员提供可视化的距离间隔。
【关键词]智能;制动;超声渡;单片机1绪论随着汽车保有量的增长,道路交通事故已成为世界性的社会问题。
全世界每年死于道路交通事故的人数估计超过50万人.伤1000万人,而我国则是世界上交通事故最严重的国家。
严峻的现实使人们不能不正视汽车安全性问题。
从市场营销的角度看,提高汽车安全性就是增加企业产品的市场占有率;从消费者利益的角度看,提高汽车安全性就是强化对人的生命和财产的保障:从政府管理的角度看,提高汽车安全性就是稳定社会、保证经济繁荣的重要举措。
超声波测距和智能制动系统的开发也将成为汽车主动安全技术的支柱。
本次设计,就是尝试设计一种基于单片机的超声波测距系统,使其能够实现智能制动,同时为驾驶员提供可视化的距离间隔。
2超声波系统的研究背景及概括21超声波系统的研究背景概括硬意义超声波测距的原理是利用超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时。
超声波在空气中传播.途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(S),即:s=340t[2。
超声波主要有三种测距方法:1)相位检测法:2)声波幅值检测法:3)渡越时间检测法,即所谓的时间差测距法。
本设计的超声波测距就是使用了渡越时间检测法。
在移动车辆中应用的超声波传感器,是利用超声波在空气中的定向传播和固体反射特性(纵波),通过接收自身发射的超声波反射信号:根据超声波发出及回波接收的时间差和传播速度:计算传播距离(不考虑多普勒效应的影响):从而得到障碍物到车辆的距离,同时将单片机处理过的信号传递给制动控制单元,以根据车距做出实时的制动反应,避免“追尾”事故的发生。
基于单片机的自动门控制系统设计
基于单片机的自动门控制系统设计自动门控制系统是一种能够自动感知人员或车辆接近门并相应地打开或关闭门的系统。
它不仅提供了方便和高效的进出门方式,还提供了一定的安全性和便利性。
本文将介绍一个基于单片机的自动门控制系统的设计。
1.系统概述本系统采用基于单片机的控制方式,主要包括传感器模块、单片机模块、电机驱动模块和门体模块。
当有人或车辆接近门时,传感器将感知到并发送信号给单片机,单片机通过判断信号来控制电机驱动门体的开、关。
2.硬件设计2.1传感器模块传感器模块主要包括红外传感器和超声波传感器。
红外传感器可用于检测人体或车辆的接近,而超声波传感器可用于测量距离。
2.2单片机模块单片机模块采用单片机芯片作为控制核心,负责处理传感器模块发送的信号,并控制电机驱动门体的开关。
常用的单片机有ATmega16或ATmega328等。
2.3电机驱动模块电机驱动模块用于控制门体的运动。
通常采用电机驱动芯片如L298N作为电机驱动模块。
2.4门体模块门体模块由电动机驱动门体的运动部分组成,可通过电机驱动模块的控制实现门的开关。
门体通常由门体机构和门体控制电路组成。
3.软件设计3.1程序设计程序设计主要包括信号处理程序和控制程序。
信号处理程序负责接收传感器模块发送的信号,并进行判断。
当信号满足开门条件时,控制程序将发送控制信号给电机驱动模块,控制门体的运动。
3.2控制算法控制算法可根据实际情况选择合适的控制方式,如PID控制、ON/OFF控制等。
具体的控制算法可根据门体运动的要求和系统的响应速度进行选择。
4.系统实现系统实现时需要将传感器模块、单片机模块、电机驱动模块和门体模块连接起来,并进行程序编写和调试。
同时还需要考虑系统的可靠性和安全性,并根据实际需求对系统进行调整和改进。
5.总结基于单片机的自动门控制系统设计可以实现自动感知人员或车辆接近门,并相应地打开或关闭门。
本文提供了一个基本的设计框架和实现过程,并介绍了关键的硬件和软件设计要点。
基于单片机的倒车防撞预警系统设计
基于单片机的倒车防撞预警系统设计倒车防撞预警系统是一种广泛应用于汽车上的辅助设备,可以帮助驾驶员在倒车过程中避免与障碍物发生碰撞。
本文将介绍一个基于单片机的倒车防撞预警系统的设计。
一、系统设计方案1.硬件设计部分:(1)超声波传感器:用于检测倒车车辆后方距离的变化,一般使用多个超声波传感器进行检测。
(2) 单片机(如Arduino):用于接收超声波传感器的信号并进行处理,同时控制显示器和蜂鸣器发出预警信号。
(3)显示器:用于显示倒车车辆后方的障碍物距离,可以使用LCD显示屏。
(4)蜂鸣器:用于发出声音预警信号,提醒驾驶员注意。
2.软件设计部分:(1)超声波传感器信号处理:单片机接收超声波传感器的信号,并进行滤波和幅值处理,得到障碍物距离值。
(2)倒车距离显示:将障碍物距离值显示在LCD屏幕上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(3)声音预警:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
二、系统实现步骤1.硬件实现:(1)连接超声波传感器:按照超声波传感器的规格书连接传感器与单片机。
(2)连接LCD显示屏:将LCD显示屏连接到单片机。
(3)连接蜂鸣器:将蜂鸣器连接到单片机。
2.软件实现:(1)单片机初始化:初始化单片机,设置IO口的输入输出模式和引脚功能。
(2)读取超声波传感器信号:通过IO口读取超声波传感器的信号,并进行幅值处理,得到障碍物距离值。
(3)显示距离信息:将障碍物距离值显示在LCD显示屏上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(4)发出声音预警信号:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
三、系统测试和优化1.测试:将倒车防撞预警系统连接到倒车车辆上,进行实际测试。
测试过程中要注意校准超声波传感器和LCD显示屏的正确读数,以及蜂鸣器声音的预警效果。
2.优化:根据实际测试结果优化系统设计,可考虑加入其他传感器,如摄像头等,提高系统的准确性和可靠性。
基于单片机的智能小车避障循迹系统设计

基于单片机的智能小车避障循迹系统设计一、本文概述随着科技的不断进步和智能化趋势的深入发展,单片机技术在现代电子系统中扮演着日益重要的角色。
特别是在智能机器人、自动化设备等领域,基于单片机的智能系统设计成为研究的热点。
其中,智能小车作为一种典型的移动机器人平台,具有广泛的应用前景。
智能小车能够在复杂环境中自主导航、避障和完成任务,这对于提高生产效率、降低人力成本以及实现智能化管理具有重要意义。
本文旨在设计一种基于单片机的智能小车避障循迹系统。
该系统利用单片机作为核心控制器,结合传感器技术、电机驱动技术和控制算法,实现小车的自主循迹和避障功能。
通过对小车硬件和软件的设计与优化,使其在复杂环境中能够稳定、高效地运行,并具备一定的智能化水平。
本文首先介绍了智能小车的研究背景和意义,阐述了基于单片机的智能小车避障循迹系统的研究现状和发展趋势。
然后,详细描述了系统的总体设计方案,包括硬件平台的搭建和软件程序的设计。
在硬件设计方面,重点介绍了单片机的选型、传感器的选择与配置、电机驱动电路的设计等关键部分。
在软件设计方面,详细阐述了避障算法和循迹算法的实现过程,以及程序的编写和调试方法。
本文还通过实验验证了所设计系统的可行性和有效性。
通过实验数据的分析和对比,证明了该系统在避障和循迹方面具有较高的准确性和稳定性。
本文也探讨了系统存在的不足之处和未来的改进方向,为相关领域的研究提供了一定的参考和借鉴。
本文设计的基于单片机的智能小车避障循迹系统具有较高的实用价值和广泛的应用前景。
通过不断优化和完善系统的设计,有望为智能机器人和自动化设备的发展做出积极的贡献。
二、系统硬件设计在智能小车避障循迹系统设计中,硬件设计是整个系统的基石。
我们选用了性价比较高、易于编程控制的单片机作为核心控制器,围绕它设计了整个硬件系统。
核心控制器:选用了一款高性能、低功耗的单片机作为核心控制器,负责处理传感器数据、执行避障和循迹算法,以及控制小车的运动。
室内防盗智能控制系统设计

室内防盗智能控制系统设计摘要:为应对安全家居的需要本文设计了一种基于单片机的室内防盗智能控制系统,该系统使用单片机作为中央控制单元,综合使用多种模块实现了防盗检测和报警。
关键词:单片机室内防盗检测报警随着生活水平的提高,特别是物质生活水平的不断提高。
人们对自己的个人安全和家庭财产安全越来越重视,安全已成为一种市场需求。
基于gsm的室内防盗智能控制系统设计可解决这种安全的需求,让家庭防盗更及时、使用更方便。
1、系统工作原理本系统采用atmel公司的stc89c51单片机作为控制处理器核心,通过接受来自各个模块传来的信号相应的做出各种处理。
红外线感应模块,采用hc-sr501普通型人体红外感应模块,此模块当打开启动开关并进入扫描模式,当设定的感应区出现人时,模块会产生高电平,人离开时恢复为低电平单片机的1个i/o口导人,一旦识别出下降沿,单片机会驱动蜂鸣器发出报警提示以及发光二极管以流水形式闪烁。
探测器选用无线门磁,当永磁体离开干簧管一定距离后,探测器立即发射包含地址编码和自身识别码(数据码)的315mhz高频无线电信号,接收电路通过识别这个无线电信号的地址码来判断是否是同一个报警系统的,然后根据自身识别码,确定是哪一个探测器报警。
2、系统硬件电路智能报警系统硬件总体结构主要包括中央控制器、发射接收模块,dtmf(双音多频)模块,语音模块,电话接口模块等。
2.1 中央控制器选用at89c51单片机。
p3。
2(int0)连接防盗探测器,用来检测盗情,如果盗情发生,触发外部中断0。
p2.1连接语音电路,实现语音的回放控制。
p2.3连接电话接口芯片,实现模拟摘挂机控制。
p1.0输出模拟远程控制。
p1.4连接报警蜂鸣器。
p0.0~p0.3分别与mr8888的d0~d3相连,用做数据总线。
p2.0与mt8888的rs0相连,控制mt8888内部寄存器的选择。
p2.7与mt8888的cs控制mt8888的选通。
基于单片机的校园安防系统
视 频备份
霉\ ● 、 摄 像 头
,
一
一
T
’
~ , 、
I 、
、 、
摄像 头
, . 、
、
、 .
, .
一
控 制 中
心
- .
l
I
,
传感器
数 码世 界P . 1 3 6
/
核心 单片机
参数 录入
综 合
图4设定密 码的流程
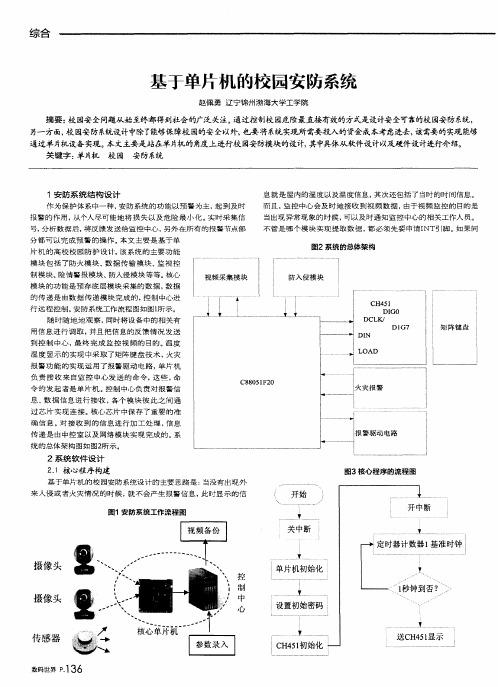
频 采集 模 块 的 重要 任 务就 是 传 递 采集 到 的 数 据 , 并且 数 据 保 存 操 作又 控 制 中心 完 成 。视 频 采 集 模
用键 盘 扫描 实现 复位操 作 。 单 片 机 连 接 CH4 5 1 用 到了4 个 引脚 。 如 果
要做 的 就 是初 始化 程序 , 接 着再 将单 片 机的 读 写格 式 、 工 作方 式 以 及报 警上传方 式 和键 盘键位 设 置确 定下 来。然后 就是 初始 化设 置 时
首先 是上 电复位 , 给 点期间 对监 视 器进行 初始 化 , 让 M CU恢 复 初 始
级, 级 别高 的 , 将 会 优 先 提 出 申请 。构 建 硬 件 主 程 序 的 时 候 , 第 一 步
面 的RC震 荡 电路 是 用于启动 数 据 设 置 ,以及 编 译数 据 和 复位 数 据 等 ,从而 完 成 八位 数 码 管显 示功 能 。与单 片 机 进行 数 据 交 换 中 , 应
基于单片机的车辆自动驾驶系统设计
基于单片机的车辆自动驾驶系统设计车辆自动驾驶系统是现代汽车科技领域的热点研究和发展方向之一。
它利用先进的感知和控制技术,使车辆能够感知环境、做出决策并自主行驶。
在车辆自动驾驶系统中,单片机作为核心控制单元起着至关重要的作用。
本文将深入探讨基于单片机的车辆自动驾驶系统设计。
首先,我们需要了解什么是自动驾驶系统。
自动驾驶系统是一种利用多种传感器和先进的算法来感知、分析和决策,实现车辆自主行驶的系统。
其中,传感器主要用于采集车辆周围环境的信息,例如雷达、摄像头、激光雷达等。
算法则通过处理传感器数据,实现车辆的目标检测、路径规划和车辆控制等功能。
基于单片机的车辆自动驾驶系统设计中,单片机充当了系统的控制核心。
单片机通常选用高性能的ARM架构处理器,具有丰富的外设接口以及强大的运算和控制能力。
单片机通过与传感器和执行器的连接,实现对车辆环境信息的获取和对车辆的控制。
在这个系统中,单片机起到了数据处理、决策和控制的关键作用。
在设计基于单片机的车辆自动驾驶系统时,首先需要考虑的是传感器的选择和布局。
常用的传感器包括雷达、摄像头、激光雷达等。
雷达主要用于测距和障碍物检测,可以提供较远距离的检测能力。
摄像头则主要用于检测车辆周围的图像信息,可以实现对车道线、标志物、行人等的检测。
激光雷达则可以提供高精度的环境地图,用于车辆的定位和路径规划。
接下来,需要考虑如何将传感器数据与单片机进行连接和通信。
可以通过多种方式实现传感器数据与单片机的通信,例如串口、I2C、SPI等。
在选择通信方式时,需要考虑数据传输速率、通信距离和稳定性等因素。
此外,还需要编写相应的驱动程序,以实现对传感器的控制和数据采集。
在获取传感器数据后,接下来需要进行数据处理和决策。
数据处理主要包括对传感器数据的滤波、降噪和特征提取等操作,以获得准确的环境信息。
决策模块则通过对环境信息的分析和判断,制定出最优的行驶策略。
在这个过程中,算法的选择和优化将起到至关重要的作用。
陈天翔基于单片机的距离保护系统设计开题报告ppt课件.ppt

选题的目的和意义
从19世纪末电力运用以来,电能在现代工
业生产中变成了主要能源和动力,是一种清 洁的二次能源,是实现生产自动化的重要物 质基础。之所以变电所必须改变传统的设计 和控制模式,是因为是电能传输与控制的中 间枢纽。只有这样才能适应现代电力系统、 现代化工业生产和社会生活的发展趋势。
继电保护装置是一种反应电力系统故障 状态和不正常运行状态,并动作于断路器跳 闸和发出信号的设备。
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
Contents
目录
选题的意义 课题发展的现状和前景展望
课题的主要内容 研究方法、步骤和措施
•1
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
•2
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
距离保护是反应故障点至保护安装地点之间 的距离(或阻抗)。并根据距离的远近而确定动 作时间的一种保护装置。
在现代电网中,随着超高压、大容量、远距 离输电新路的不断增多,对电力系统的安全稳 定运行提出了更高、更严格的要求。传统的基 于单片机等低位数处理器的保护装置应用与高 压线路保护时,存在运算速度慢、存储量小、 可靠性低等缺点,很难满足现代电力系统的发 展需求。
•3
在整堂课的教学中,刘教师总是让学 生带着 问题来 学习, 而问题 的设置 具有一 定的梯 度,由 浅入深 ,所提 出的问 题也很 明确
02
课题的发展现况与前景展望
毕业设计论文--基于单片机的超声波测距系统设计
毕业设计(论文)题目:基于单片机的超声波测距系统设计摘要由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
超声波测距系统,可以应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于液位、井深、管道长度的测量等场合。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。
本文介绍了一种基于STC89C52单片机的超声波测距系统,阐述了超声波测距系统的硬件电路部分的构成、软件设计思路及工作原理。
硬件部分采用STC89C52 单片机作为主控单片机,硬件电路主要由发射电路、接收电路、显示电路、报警电路等几部分组成;软件部分由主程序、显示子程序、超声波发射子程序、延迟子程序、计算子程序、报警程序等组成。
该电路具有结构简单、操作方便、精度较高、应用广泛的特点。
关键词:超声波;测距系统;单片机AbstractBecause of the strong point of ultrasonic energy consumption slow, medium of communication in the longer distance, thus frequently used ultrasonic distance measurement, such as the range finder and level measurement and so on can be achieved by ultrasound. Ultrasonic Ranging System, can be used in car reversing, the construction site and the location of some industrial site monitoring, can also be used if the level, depth and length of the pipeline, such as measurement occasions. Use of ultrasonic testing is often more rapid, convenient and simple terms, easy to achieve real-time control, and measurement accuracy can meet the practical requirements of industry.The paper describes an ultrasonic measuring system based on the STC89C52, it described an ultrasonic measuring system hardware circuit structure, working principle and software design methods. Hardware using STC89C52 microcontroller as a master MCU, the hardware circuit part includes main transmitter, receiver circuit, display circuit, warning circuit and so on. The software part includes the main program, display subroutine, ultrasonic transmitter subroutine, delay subroutine, calculation subroutine and alarm program. The system Circuits were simply structure, easy to use, high accuracy and wide application.Key Words:Ultrasonic wave;Ranging System;MCU目录摘要 (I)Abstract (II)第1章绪论............................................................................................................. - 1 -1.1 测量距离的意义.................................................................................................... - 1 -1.2 基于单片机的超声波测距系统.......................................................................... - 2 -1.2.1 单片机概述 ...................................................................................................... - 2 -1.2.2 单片机的发展趋势 ........................................................................................ - 2 -1.2.3 基于单片机的超声波测距系统的优点与缺陷 ........................................ - 3 -1.2.4 超声波测距原理............................................................................................. - 4 -1.3设计内容 .................................................................................................................. - 4 -第2章设计方案..................................................................................................... - 5 -2.1 设计的目的和要求................................................................................................ - 5 -2.1.1 设计的目的 ..................................................................................................... - 5 -2.1.2 设计的要求 ..................................................................................................... - 5 -2.2 设计思路................................................................................................................. - 5 -2.2.1 硬件部分.......................................................................................................... - 5 -2.2.2 软件部分.......................................................................................................... - 6 -2.3 重要功能模块的选取 ........................................................................................... - 6 -2.3.1 单片机的选用 ................................................................................................. - 6 -2.3.2 发射器和接收器............................................................................................. - 8 -第3章硬件电路设计............................................................................................. - 9 -3.1 系统硬件设计总框图分析 .................................................................................. - 9 -3.2 处理器STC89C52................................................................................................. - 9 -3.2.1 单片机STC89C52的特点 ......................................................................... - 10 -3.2.2 STC89C52管脚说明 .................................................................................... - 11 -3.3 单片机最小系统设计 ......................................................................................... - 14 -3.3.1 单片机最小系统........................................................................................... - 14 -3.3.2 本次设计中的单片机最小系统................................................................. - 14 -3.4 超声波模块HC-SR04 ........................................................................................ - 17 -3.5 显示模块LCD1602 ............................................................................................ - 18 -3.6 报警模块............................................................................................................... - 21 -3.7 超声波测距系统的实物图 ................................................................................ - 22 -第4章软件程序设计........................................................................................... - 23 -4.1 概述........................................................................................................................ - 23 -4.2 头文件和全局变量.............................................................................................. - 23 -4.3 主程序 ................................................................................................................... - 24 -4.4 初始化函数........................................................................................................... - 25 -4.5 显示子程序和溢出中断程序 ............................................................................ - 25 -4.6 超声波发射程序、T1中断子程序和报警程序 ............................................ - 26 -4.7 距离计算程序 ....................................................................................................... - 27 -第5章系统的调试............................................................................................... - 28 -5.1 硬件的调试........................................................................................................... - 28 -5.2 软件的调试........................................................................................................... - 29 -结论..................................................................................................................... - 32 -参考文献................................................................................................................. - 33 -附录..................................................................................................................... - 34 -1.源程序 .................................................................................................................... - 34 -2.英文原文 ................................................................................................................ - 41 -3.中文译文 ................................................................................................................ - 53 -致谢..................................................................................................................... - 62 -第1章绪论1.1 测量距离的意义准确而快速地测定任意两个空间点间的距离,对人类活动的许多方面都具有十分重要的意义。
基于单片机激光测距毕业设计

基于单片机激光测距毕业设计本科生毕业设计基于单片机的激光测距院系电气信息工程学院专业电子信息工程班级学号学生姓名联系方式指导教师职称:2011年 5 月独创性声明本人郑重声明:所呈交的毕业论文(设计)是本人在指导老师指导下取得的研究成果。
除了文中特别加以注释和致谢的地方外,论文(设计)中不包含其他人已经发表或撰写的研究成果。
与本研究成果相关的所有人所做出的任何贡献均已在论文(设计)中作了明确的说明并表示了谢意。
签名:年月日授权声明本人完全了解许昌学院有关保留、使用本科生毕业论文(设计)的规定,即:有权保留并向国家有关部门或机构送交毕业论文(设计)的复印件和磁盘,允许毕业论文(设计)被查阅和借阅。
本人授权许昌学院可以将毕业论文(设计)的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存、汇编论文(设计)。
本人论文(设计)中有原创性数据需要保密的部分为(如没有,请填写“无”):签名:年月日指导教师签名:年月日摘要激光具有高亮度、高方向性、高单色性和高相干性等优点,所以,利用激光传感器技术和自动控制技术相结合的测距方案中,激光测距是目前应用最普遍的一种,本课题介绍了激光传感器的原理和特性,以及Atmel公司的AT87C51单片机的性能和特点,并在分析了激光测距的原理基础上,指出了设计测距系统的思路和所需考虑的问题,给出了以AT87C51单片机为核心的低成本,高精度。
微型化数字显示激光测距的硬件电路和软件设计方法,该系统设计合理,工作稳定,能量良好,检测速度快,计算简单。
易于做到实时控制,并且在测量精度方面能达到工业应用的要求。
关键字:激光;测距;单片机ABSTRACTLaser possesses high brightness, high directional, high monochromatic and high coherence wait for an advantage, therefore, by using laser sensor technology and automatic control technology in combination of measurement program, laser range is most broadly applied , the subject of laser sensors is introduced, and the principle and characteristics of single chip AT87C51 Atmel company performance and characteristics, and analyzes the principle of laser range finder, points out the basis of ideas and design ranging system needed consider the question, given a AT87C51 singlechip is low cost, high precision. Miniaturization digital display laser ranging hardware circuit and software design method, the system design is reasonable, stable work, energy, detection speed, good simple calculation. Easy to achieve real-time control, and the precision in measurement can reach the request of industrial applications.Key word: laser; ranging; microcontroller目录1 绪论 12 激光测距的基础 22.1 激光测距设计的思路 22.2 激光测距设计的原理 32.3 本激光测距设计的要求 42.4 本论文的主要研究内容 43 脉冲激光测距系统设计 53.1 激光测距仪系统结构 53.2 激光脉冲发生电路 63.3 脉冲激光接收电路7光电检测传感器的比较选择7雪崩光电二极管APD 8雪崩光电二极管APD的反向偏压 9 电路工作原理9电压控制反馈电路10放大电路124 计时及显示部分设计144.1 计时部分14计时原理 14内插法14利用单片机和CPLD实现模拟内插 15 4.2 距离计算部分17最小系统17计算部分子程序设计184.3 计算机控制LED显示部分19LED说明1974HC573说明20控制的LED显示部分电路设计21显示部分程序设计234.4 系统控制部分设计245 误差分析及总结 255.1 误差分析255.2 总结展望26参考文献27附录28致谢321 绪论二十世纪以来,激光传感器技术日趋成熟,并开始大量应用于测距系统。
基于单片机的汽车倒车防撞系统设计

基于单片机的汽车倒车防撞系统设计汽车倒车防撞系统是现代汽车的重要安全装置之一,其主要功能是帮助驾驶员避免在倒车时发生撞击和碰撞事故。
本文将介绍一个基于单片机的汽车倒车防撞系统设计。
1.系统概述汽车倒车防撞系统由超声波传感器模块、单片机控制模块和蜂鸣器模块组成。
超声波传感器模块用于测量周围的障碍物距离,单片机控制模块负责接收传感器数据并进行处理,最后根据测量结果控制蜂鸣器发出声音警示驾驶员。
2.硬件设计系统采用了传感器模块和单片机模块进行设计。
超声波传感器模块采用了多个超声波传感器,可以实现多个方向同时进行距离测量。
单片机模块采用了一颗高性能的单片机芯片,具备快速处理能力和丰富的接口。
3.软件设计软件设计主要包括以下几个方面:3.1超声波传感器数据采集:通过对超声波传感器发送脉冲信号并接收回波信号,可以计算出测得的距离值。
3.2数据处理和判断:将采集到的距离值与事先设定的安全距离进行比较,当距离小于设定值时,证明有障碍物靠近,需要发出警示信号。
3.3警示信号发出:当检测到障碍物靠近时,单片机控制蜂鸣器发出声音警示驾驶员。
可以通过改变声音的频率和持续时间来表达不同的警示级别。
4.系统测试和优化设计完成后,需要对系统进行测试,并根据测试结果进行优化。
4.1传感器精度和稳定性:测试传感器的测距精度和稳定性,确保传感器测量结果准确可靠。
4.2系统响应时间:测试系统的响应时间,确保系统能够及时发出警示信号。
4.3警示效果:通过模拟实际倒车场景,测试系统的警示效果,确保驾驶员能够准确理解警示信号。
5.总结和展望基于单片机的汽车倒车防撞系统设计可以有效地帮助驾驶员避免倒车事故的发生。
然而,目前的设计还有一些问题需要进一步解决,如系统的稳定性和可靠性需要不断优化,同时还可以考虑引入图像处理技术来提升系统的性能。
总之,基于单片机的汽车倒车防撞系统设计有着广阔的应用前景和发展空间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的安全距离控制系统设计安全是人们生活中最基本的需求之一。
特别是在交通领域,保障行人和车辆的安全十分重要。
随着科技的不断发展,基于单片机的安全距离控制系统应运而生,为交通安全提供了有效的解决方案。
本文将介绍基于单片机的安全距离控制系统的设计原理、硬件构成和实现过程。
一、设计原理
基于单片机的安全距离控制系统设计的原理是通过测量车辆之间的距离,根据距离的变化来判断是否存在安全隐患,并根据实际情况做出相应的控制措施。
该系统主要由以下几个技术组成:
1. 超声波传感技术:使用超声波传感器来测量车辆之间的距离。
超声波传感器能够发射超声波并接收反射回来的信号,通过测量超声波的往返时间,可以计算出车辆之间的距离。
2. 单片机控制技术:使用单片机来控制整个系统的运行。
单片机能够接收超声波传感器的信号,并进行相应的计算和判断,然后控制输出端口来实现对车辆的控制。
3. 电路设计技术:设计合适的电路来实现系统的功能。
电路主要包括超声波传感器的接口电路、单片机的控制电路和输出端口的驱动电路等。
二、硬件构成
基于单片机的安全距离控制系统的硬件构成主要包括以下几个部分:
1. 单片机:选择适合的单片机作为系统的核心控制器。
单片机需要
具备足够的计算能力和接口功能,以满足系统的需求。
2. 超声波传感器:选择合适的超声波传感器,它需要能够稳定地发
射超声波并接收返回的信号,并能够输出模拟或数字信号。
3. 驱动电路:根据需要设计合适的驱动电路,用于控制输出端口,
实现对车辆的控制。
驱动电路需要具备足够的功率和稳定性。
4. 显示器:为了方便用户观察系统的运行状态,可以添加一个显示
器来显示测量结果或其他相关信息。
三、实现过程
基于单片机的安全距离控制系统的实现过程主要包括以下几个步骤:
1. 系统原理设计:根据安全距离控制系统的原理和要求,设计系统
的工作流程和功能模块。
2. 硬件布局设计:根据系统的硬件构成,合理地布局各个硬件模块,并进行连线和连接。
3. 软件编程设计:使用合适的编程语言编写单片机的代码,实现系
统的功能。
编程需要考虑到距离测量、判断和控制等方面。
4. 测试和优化:对系统进行测试,发现问题并进行优化。
测试主要
包括功能测试和稳定性测试。
通过以上步骤,基于单片机的安全距离控制系统可以得到稳定可靠的运行,并能够根据车辆之间的距离变化做出相应的控制措施,为交通安全提供有效的保障。
结语
基于单片机的安全距离控制系统设计,通过利用超声波传感技术和单片机控制技术,可以实现对车辆之间的距离进行测量和控制,为交通安全提供了一种有效的解决方案。
随着科技的不断进步,该系统有望进一步完善以适应更复杂的交通环境和需求,为人们的出行带来更加安全和便利的体验。