PLC控制的车辆出入库管理梯形图控制程序
013012 《PLC原理及应用》课程设计课题

《PLC原理及应用》课程设计任务书PLC A组一、五层电梯PLC梯形图程序控制要求:1. 解读程序,写出各控制段的说明2.输入程序,并完成电梯模型与PLC的接线3.对PLC母子机完成配置4.运行程序并调试5.画出电梯运行程序的框图,并对程序输入过程作必要的说明,对调试过程作小结二、全自动洗衣机梯形图控制程序的设计与调试1. 控制要求:(1)按下启动按钮及水位选择开关,注水直到高(中、低)水位,关水(2)2s后开始洗涤(3)洗涤时,正转30s,停2s,然后反转30s,停2s(4)如此循环5次,总共320s后开始排水,排空后脱水30s(5)开始清洗,重复(2)~(5),清洗两遍(6)清洗完成,报警3s并自动停机(7)若按下停车按扭,可手动排水(不脱水)和手动脱水(不计数)输入点:输出点:启动10001 低水位检测10009 启动洗衣机00001停止10002 手动排水10010 进水阀00002高水位10003 手动脱水10011 正转00003中水位10004 反转00004低水位10005 排水00005排空检测10006 脱水00006高水位检测10007 报警00007中水位检测100082. 若要求启动开关分为标准洗和轻柔洗,试改变有关输入点,并在程序中加入轻柔洗功能(轻柔洗过程自定)3. I/O编址4.编程并调试三、自行设计课题要求:设计十字路口交通灯控制课题及程序(1)观察桂林路漕宝路口交通灯(包括左转弯灯和行人灯)的工作时序(2)设计课题:课题名称、控制要求、时序图、I/O编址(3)编程并调试(4)I/O端子接线图四、完成课程设计说明书1. 课题名称及要求2. 程序(包括注释)、框图、时序图、I/O接线图等3. 有关的说明及调试小结等4. 课程设计的心得《PLC原理及应用》课程设计任务书PLC B组一、饮料灌装生产流水线PLC梯形图控制程序设计与调试1. 控制要求:(1)系统通过开关设定为自动操作模式,一旦启动,则传送带的驱动电机启动并一直保持到停止开关动作或灌装设备下的传感器检测到一个瓶子时停止;瓶子装满饮料后,传送带驱动电机必须自动启动,并保持到又检测到一个瓶子或停止开关动作(2)当瓶子定位在灌装设备下时,停顿1s,灌装设备开始工作,灌装过程为5s钟,灌装过程应有报警显示,5s后停止并不再显示报警;报警方式为红灯以0.5s间隔闪烁(3)用两个传感器和若干个加法器检测并记录空瓶数和满瓶数,一旦系统启动,必须记录空瓶数和满瓶数,设最多不超过瓶(4)可以手动对计数器清零(复位)2. 编程并调试3. 画出I/O端子接线图二、12层电梯楼层定位及十进制数显示梯形图控制程序设计与调试1. 控制要求:(1)根据各楼层行程开关的状态,确定轿厢所在楼层(2)用两个七段LED数码管作两位十进制层楼位置显示(注:若输出点不够,可借助两点内部继电器)(3)以00作维修显示并可手动关闭显示2. 编程、调试3. 七段码编码示意图、真值表、I/O端子接线图三、物业供水系统水泵梯形图控制程序设计与调试某物业供水系统有水泵4台,供水管道安装压力检测开关K1,K2和K3。
车辆出入库plc控制系统课程设计
® MM瞬电气控制与PLC课程设计说明书题目车辆出入库PLC自动控制系统设计______________专业班级:________________________________姓名:_______________________________________学号:_______________________________指导教师:___________________________________成绩:指导老师签名:日期:目录1 系统背景描述及设计要求 (1)1.1 系统背景描述 (1)1.2 设计要求......................................................................2.2 方案论证 (2)2.1硬件结构 (2)2.2设计方案 (3)2.3 方案比较及方案具体确定 (4)3 硬件设计 (10)3.1 系统的原理方框图 (10)3.2主电路图 (11)3.3 I/O点分配 (12)3.4 I/O接线图 (13)3.4元器件选择................................................... 1.34 软件设计 (14)4.1 主程序流程图 (14)4.2梯形图 (17)5 系统调试 (17)设计心得 (17)参考文献 (18)1 系统背景描述及设计要求1.1 系统背景描述随着生产力和科学技术的不断发展,人们的日常生活和生产活动大量的使用自动化控制,不仅节约了人力资源,而且很大程度的提高了生产效率,又进一步的促进了生产力快速发展,并不断的丰富着人们的生活。
早期的自动控制系统是依靠继电- 接触器来实现的,其特点是:结构简单、价格低廉、抗干扰能力强,可以实现集中控制和远距离控制,但是其采用固定接线,通用性和灵活性差;又采用触点的开关动作,工作频率低,触点易损坏,可靠性差。
1969年,出现了可编程逻辑控制器PLC( Programmable Logic Controller ),其特点是:具备逻辑控制、定时、计数等功能,编程语言采用直观的梯形图语言,软件更改方便,通用性和灵活性好。
基于PLC的送料小车接线图及梯形图
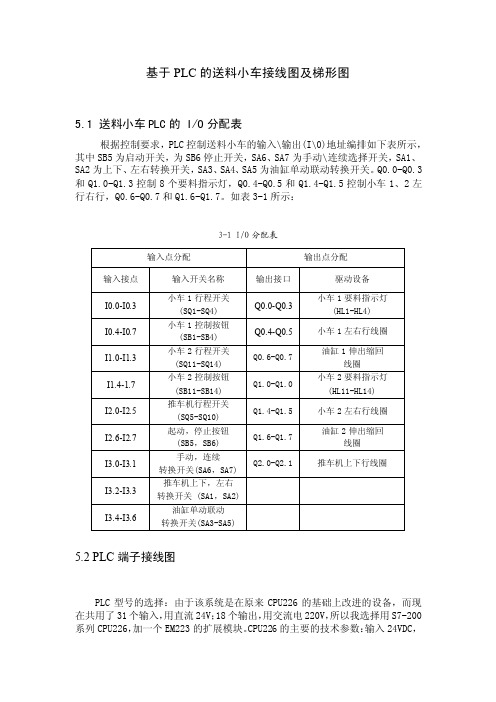
基于PLC的送料小车接线图及梯形图5.1 送料小车PLC的 I/O分配表根据控制要求,PLC控制送料小车的输入\输出(I\0)地址编排如下表所示,其中SB5为启动开关,为SB6停止开关,SA6、SA7为手动\连续选择开关,SA1、SA2为上下、左右转换开关,SA3、SA4、SA5为油缸单动联动转换开关。
Q0.0-Q0.3和Q1.0-Q1.3控制8个要料指示灯,Q0.4-Q0.5和Q1.4-Q1.5控制小车1、2左行右行,Q0.6-Q0.7和Q1.6-Q1.7。
如表3-1所示:3-1 I/O分配表5.2 PLC端子接线图PLC型号的选择:由于该系统是在原来CPU226的基础上改进的设备,而现在共用了31个输入,用直流24V;18个输出,用交流电220V,所以我选择用S7-200系列CPU226,加一个EM223的扩展模块。
CPU226的主要的技术参数:输入24VDC,24点;输出220VAC,16点;电源电压为AC100—240V 50/60Hz。
EM223的主要技术参数:输入24VDC,8点;输出220VAC,8点;电源电压为AC100—240V 50/60Hz。
如图3-1所示:图3-1 端子接线图5.3 梯形图分段设计本次设计的自动送料小车梯形图,是分开来画的。
由总程序结构图、自动操作程序图、手动操作程序图、小车1左右自动送料运行程序图、小车2左右自动送料运行程序图组成。
图3-2 总系统结构图(1)程序的总结构图如图3-2所示:因为在手动操作方式下,各种动作都是用按钮控制来实现的,其程序可独立于自动操作程序而另行设计。
因此,总程序可分为两段独立的部分:手动操作程序和自动操作程序。
当选择手动操作时,则输入点I3.0接通,其常闭触点断开,执行手动程序,并由于I3.1的常闭触点为闭合,则跳过自动程序。
若选择自动操作方式,将跳过手动程序段而执行自动程序。
(2)自动程序设计,自动操作控制主要是由行程开关来控制推车机的上行、下行,两缸的伸出、缩回。
PLC课程设计题目
可编程控制器原理及应用课程设计题目1. 设计抢答器PLC控制系统。
控制要求:1)抢答台A、B、C、D,有指示灯,抢答键。
2)裁判员台,指示灯,复位按键。
3)抢答时,有2S声音报警。
4)用数码管显示抢中的组号。
2设计两台电动机顺序控制PLC系统。
控制要求:两台电动机相互协调运转,M1运转10S,停止5S,M2要求与M1相反,M1停止M2运行,M1运行M2停止,如此反复动作3次,M1和M2均停止。
3.设计交通红绿灯PLC控制系统。
控制要求:1)东西向:绿5S,绿闪3次,黄2S;红10S。
2)南北向:红10S,绿5S,绿闪3次,黄2S。
4设计彩灯顺序控制系统。
控制要求:1)A亮1S,灭1S;B亮1S,灭1S;2)C亮1S,灭1S;D亮1S,灭1S。
3)A、B、C、D亮1S,灭1S。
4)循环三次。
5.用PLC对自动售汽水机进行控制,工作要求:1)此售货机可投入1元、2元硬币,投币口为LS1,LS2;2)当投入的硬币总值大于等于6元时,汽水指示灯L1亮,此时按下汽水按钮SB,则汽水口L2出汽水12秒后自动停止。
3)不找钱,不结余,下一位投币又重新开始。
6.设计电镀生产线PLC控制系统.控制要求:1)SQ1—SQ4为行车进退限位开关,SQ5—SQ6为上下限为开关。
2)工件提升至SQ5停,行车进至SQ1停,放下工件至SQ6,电镀10S,工件升至SQ5停,滴液5S,行车退至SQ2停,放下工件至SQ6,定时6S,工件升至SQ5停,滴液5S,行车退至SQ3停,放下工件至SQ6,定时6S,工件升至SQ5停,滴液5S,行车退至SQ4停,放下工件至SQ6。
3)完成一次循环。
7.皮带运输机传输系统有一3台皮带运输机传输系统,分别用电动机M1、M2、M3带动,控制要求如下:按下起动按钮,先起动最末一台皮带机M3,经5S后再依次起动其它皮带机。
正常运行时,M3、M2、M1均工作。
按下停止按钮时,先停止最前一台皮带机M1,待料送完毕后再依次停止其它皮带机。
机电控制及可编程序控制器技术课程设计参考选题

《机电控制及可编程序控制器技术》课程设计参考选题选题1、气动机械手操作控制装置一、气动机械手的控制要求气动机械手的动作示意图如图1所示,气动机械手的功能是将工件从A处移送到B处。
控制要求为:1、气动机械手的升降和左右移行分别由不同的双线圈电磁阀来实现,电磁阀线圈失电时能保持原来的状态,必须驱动反向的线圈才能反向运动;2、上升、下降的电磁阀线圈分别为YV2、YV1;右行、左行的电磁阀线圈为YV3、YV4;3、机械手的夹钳由单线圈电磁阀YV5来实现,线圈通电时夹紧工件,线圈断电时松开工件;4、机械手的夹钳的松开、夹紧通过延时实现;5、机械手的下降、上升、右行、左行的限位由行程开关SQ1、SQ2、SQ3、SQ4来实现;二、机械手的的操作功能机械手的操作面板如图2所示。
机械手能实现手动、回原位、单步、单周期和连续等五种工作方式。
1、手动工作方式时,用各按钮的点动实现相应的动作;2、回原位工作方式时,按下“回原位”按钮,则机械手自动返回原位;3、单步工作方式时,每按下一次启动安钮,机械手向前执行一步;4、单周期工作方式时,每按下一次启动安钮,机械手只运行一个周期;5、连续工作方式时,机械手在原位,只要按下启动安钮,机械手就会连续循环工作,直到按下停止安钮;6、传送工件时,机械手必须升到最高点才能左右移动,以防止机械手在较低位置运行时碰到其他工件;7、出现紧急情况,按下紧急停车按钮时,机械手停止所有的操作。
三、设计要求1、输入输出点分配;2、画出PLC的输入输出设备的接线图;3、完成梯形图、指令表的程序设计;4、完成设计说明书选题2、十字路口交通信号灯PLC控制系统设计与调试一、控制要求1.系统工作受开关控制,起动开关 ON 则系统工作;起动开关 OFF 则系统停止工作。
2.控制对象有八个:东西方向红灯两个 , 南北方向红灯两个,东西方向黄灯两个 , 南北方向黄灯两个,东西方向绿灯两个 , 南北方向绿灯两个,东西方向左转弯绿灯两个,南北方向左转弯绿灯两个。
机电PLC实践课题
机电10—1班PLC应用设计与实践课题及要求课题1:舞台彩灯PLC控制系统设计与调试--------------------------------------------------------------------------------一、控制要求:1.Q0.0—Q0.3输出指示灯每1S闪一次2.Q0.4—Q0.7输出指示灯每0.5S闪一次。
3.1S后全部熄灭4、Q0.0—Q0.5这6个灯每隔0.5S依次点亮,全部点亮后熄灭,重复3次后,再重新开始二、课题要求:1.按题意要求,画出PLC 端子接线图及控制梯形图。
2.完成PLC 端子接线工作, 并利用编程器输入梯形图控制程序,完成调试。
三、报告要求及格式1、《PLC控制技术及应用》课程设计2、题目:XXXXXXX3、班级、姓名、指导教师4、报告内容(1)PLC简单介绍:产生、特点、发展情况(2)PLC结构介绍、编程语言介绍(3)本课题要求、选用方案、硬件连接(4)PLC程序设计(5)PLC程序设计调试过程心得(6)参考文献课题2:PLC控制变频调速系统设计与调试--------------------------------------------------------------------------------一、控制要求:1.变频调速器受0 ~10V 输入电压控制:0V 输出频率为0HZ,对应同步转速为0 r/min;5V 输出频率为50HZ,对应同步转速为1500 r/min;10V 输出频率为100HZ,对应同步转速为3000 r/min;输入电压与输出频率按线性关系变化。
2.要求输出转速按下图(见附图)函数变化,请编写梯形图控制程序,并完成调试。
3.改变输出转速~时间变化函数,重复上述过程。
二、课题要求:1.按题意要求,画出PLC 端子接线图及控制梯形图。
2.完成PLC 端子接线工作, 并利用编程器输入梯形图控制程序,完成调试。
机电一体化专业毕业设计(论文)课题(机电方向)

机电一体化专业毕业设计(论文)课题(机电方向)【总体要求】1.给出方案与论证;2.画出系统原理图和电路图;3.主要电路设计与计算;4.系统测试与指标;5.稳定性与可靠性;6.毕业设计(论文)用计算机处理打印后用A4纸装订成册;7.在规定的时间内答辩通过后由答辩小组给出设计(或论文)的成绩;8.每位毕业生任选一题,每题不超过10名学生;9.理工类毕业设计(论文)课题类别包括设计类、软件类两大类,对选题要求的指导性意见如下:⑴设计类:学生必须独立完成一份10000字以上的设计计算说明书(论文),折合不少于5张1~2#图纸(电气信息类设计不少于3张1~2#图纸)设绘工作量,设计计算说明书(论文)中涉及参考文献不低于10篇,其中外文文献不少于2篇;⑵软件类:学生必须独立完成一个系统或较大系统中的一个模块,要有足够的工作量;完成一份10000字以上的软件说明书和论文;如涉及电路方面的内容,应完成调试工作并提供测试结果;如涉及软件开发的内容,要进行程序演示并给出结果。
论文(说明书)中涉及参考文献不低于10篇,其中外文文献不少于2篇。
课题一:基于8051单片机交通信号灯模拟控制系统的设计——指导老师:秦佳杨芳【设计任务】用单片机8051设计一个十字路口的红、绿、黄交通信号灯控制系统,画出设计总电路图,写出设计程序。
【设计要求】1.用红、绿、黄三色发光二极管作信号灯。
考虑到学生设计时的难度,只考虑一条道路相对的两个方向,每个方向有红、绿、黄三个灯。
红灯亮禁止通行,绿灯亮允许通行,每隔30秒红绿灯交替变化。
在每次由绿灯亮变成红灯亮或者由红灯亮变成绿灯亮的交替变化转换时要求黄灯闪烁5秒,给行驶中的车辆有时间停靠到禁行线之外。
2.能实现正常的计时显示功能。
用倒计时方法显示红灯、绿灯、黄灯还需亮的时间。
3.能实现控制器总清零功能。
按下某个键后,系统实现总清零,计数器由初始状态开始计数,对应状态的指示灯亮。
课题二:单片机步进电机控制器的设计——指导教师:秦佳杨芳【设计任务】用MCS-51单片机,通过软件编程,设计一个步进电机控制器。
停车场车辆出入管理plc梯形图控制程序设计
停车场车辆出入管理plc梯形图控制程序设计
停车场车辆出入管理的PLC梯形图控制程序设计可以按照以下步骤进行设计:
1. 确定输入信号:
- 车辆入场信号:检测到车辆进入停车场的信号。
- 车辆出场信号:检测到车辆离开停车场的信号。
2. 确定输出信号:
- 车位占用信号:指示停车场车位是否被占用。
- 道闸控制信号:控制道闸的开关动作。
3. 设计PLC梯形图程序:
- 输入信号处理部分:
- 当车辆入场信号触发时,设置车位占用信号为占用状态。
- 当车辆出场信号触发时,设置车位占用信号为空闲状态。
- 输出信号处理部分:
- 当车位占用信号为占用状态时,控制道闸关闭,阻止车辆出场。
- 当车位占用信号为空闲状态时,控制道闸打开,允许车辆出场。
4. 添加安全保护机制:
- 考虑添加一定的延时控制,避免车辆进出时的信号抖动导致错误操作。
- 考虑添加传感器故障检测机制,及时发现故障并报警。
请注意,以上仅为概括性的设计思路,具体的PLC梯形图控制程序设计还需要根据实际的停车场环境和设备来进行具体设计。
PLC顺序控制中编制梯形图的四种方式

PLC顺序控制中编制梯形图的四种方式可(编程)控制器(PLC)外部接线简单方便,它的控制主要是程序的设计,编制梯形图是最常用的编程方式,使用中一般有经验设计法,逻辑设计法,继电器(控制电路)移植法和顺序控制设计法,其中顺序控制设计法也叫功能表图设计法,功能表图是一种用来描述(控制系统)的控制过程功能、特性的图形,它主要是由步、转换、转换条件、箭头线和动作组成。
这是一种先进的设计方法,对于复杂系统,可以节约60%~90%的设计时间.我国1986年颁布了功能表图的国家标准(GB6988.6-86)。
有了功能表图后,可以用四种方式编制梯形图,它们分别是:起保停编程方式、步进梯形指令编程方式、移位(寄存器)编程方式和置位复位编程方式。
本文以三菱公司F1系列PLC为例,说明实现顺序控制的四种编程方式。
例如:某PLC控制的回转工作台控制钻孔的过程是:当回转工作台不转且钻头回转时,若(传感器)X400(检测)到工件到位,钻头向下工进Y430当钻到一定深度钻头套筒压到下接近开关X401时,计时器T450计时,4s后快退Y431到上接近开关X402,就回到了原位。
功能表图见图1:图1功能表图2使用起保停电路的编程方式起保停电路仅仅使用与触点和线圈有关的指令,无需编程元件做中间环节,各种型号PLC的指令系统都有相关指令,加上该电路利用自保持,从而具有记忆功能,且与传统继电器控制电路基本相类似,因此得到了广泛的应用。
这种编程方法通用性强,编程容易掌握,一般在原继电器控制系统的PLC改造过程中应用较多。
如图2为使用起保停电路编程方式编制的与图1顺序功能图所对应的梯形图,图2中只有常开触点、常闭触点及输出线圈组成。
图2起保停电路实现顺序控制3使用步进梯形指令的编程方式步进梯形指令是专门为顺序控制设计提供的指令,它的步只能用状态寄存器S来表示,状态寄存器有断电保持功能,在编制顺序控制程序时应与步进指令一起使用,而且状态寄存器必须用置位指令SET置位,这样才具有控制功能,状态寄存器S才能提供STL触点,否则状态寄存器S与一般的中间继电器M相同。
PLC课程设计(停车场车位控制 )
目录1 引言12 概述23 系统总体方案设计 ---------------------------------------------------- 33.1 主电路的设计43.2 控制电路的设计43.2.1 PLC概述43.2.2 PLC选型63.2.3系统变量定义及分配表83.2.4系统接线图设计-------------------------------------------- 94 控制系统设计124.1控制程序流程图设计124.2控制程序设计思路125 系统调试及结果分析155.1 系统调试及解决的问题----------------------------------------- 155.2 结果分析--------------------------------------------------------- 15 完毕语--------------------------------------------------------------------- 16 参考文献17附录一: 梯形图19附录一: 程序指令201 引言随着进口汽车大量涌入和国内汽车工业的不断开展,大中城市的汽车数量剧增,从而引发了停车管理问题。
近几年,我国的停车场管理技术不断完善,计算机技术、通信技术、网络技术的开展又使停车场管理的系统功能得以提高。
现在小区停车场管理系统重点要做到准确指示车辆进出,车辆进入时给与司机准确的车位数量与具体位置,车辆进入后,记录车辆数量,车辆离开时,减少车辆数量。
车辆进出指示可完全由PLC作为中央控制来处理,停车场空位指示可利用价格较不高的数码管显示。
停车场车位管理系统,它由固定在停车场中的管理控制器、埋设在车位处的电动车位锁及移动控制器相互连接构成;管理控制器包括传感器接收模块、逻辑控制电路及驱动控制电路;电动车位锁的电源端与驱动控制电路的电源输出端连接;移动控制器中设有数据读写控制电路、无线遥控发射模块及电池,该无线遥控发射模块通过移动控制器外部设置的遥控天线与管理控制器的接收天线进展无线信号连接,具有极大的实用价值。
《机电传动与控制》PLC顺序控制梯形图的编程实验

《机电传动与控制》PLC顺序控制梯形图的编程实验
一、实验目的和要求
1.掌握顺序控制设计法
2.熟悉SFC设计、转换及仿真调试操作
二、实验内容和原理
1.分析控制要求、设计SFC及梯形图程序
2.程序下载及调试
三、主要仪器设备
编程计算机、S7-1200PLC、下载线(网线)
四、操作方法与实验步骤
1.按照实验要求设计程序
2.输入程序并完成调试
基本控制要求:设计启动机械手工件转运控制系统
按下启动按钮,机械手手爪下移-吸盘工作吸附工件-机械手手爪上移-机械手右转-机械手手臂伸出-机械手手爪下移-吸盘释放工件-机械手手爪上移-机械手手臂缩回-机械手左转,完成一个工作周。
如没有按过停止按钮,系统继续进行下一周期的操作。
按下停止按钮,当前工作周期的操作结束后,才停止操作,返回并停留在初始状态。
拓展控制要求:奇数个工件放到机械手正前方;偶数个工件放到侧方。
请按控制要求绘制PLC接线图,设计SFC、PLC程序并完成下载调试。
五、实验数据记录和处理
1.I/O分配表
2.PLC接线图
3.SFC
4.PLC梯形图程序
六、实验结果与分析(程序监控图片,选择各步活动时照片共三张)
七、讨论和心得。
PLC编程设计实训课题(二)
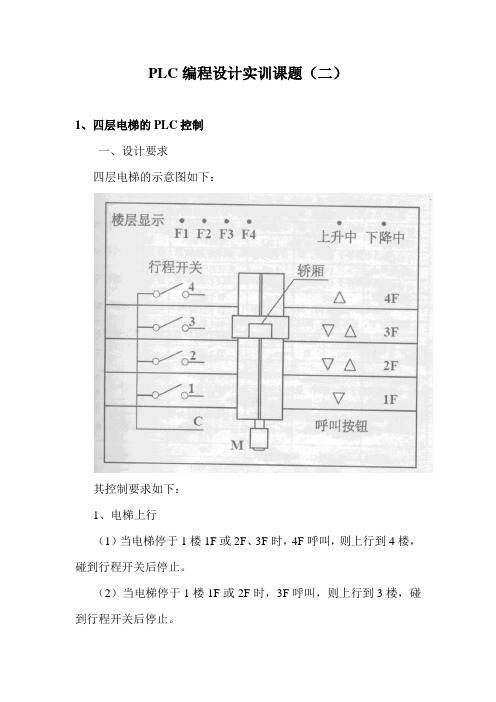
PLC编程设计实训课题(二)1、四层电梯的PLC控制一、设计要求四层电梯的示意图如下:其控制要求如下:1、电梯上行(1)当电梯停于1楼1F或2F、3F时,4F呼叫,则上行到4楼,碰到行程开关后停止。
(2)当电梯停于1楼1F或2F时,3F呼叫,则上行到3楼,碰到行程开关后停止。
(3)当电梯停于1楼1F时,2F呼叫,则上行到2楼,碰到行程开关后停止。
(4)当电梯停于1楼1F时,2F、3F同时呼叫,则上行到2楼后,停5秒后,继续上行到3F后停止。
(5)当电梯停于1楼1F时,3F、4F同时呼叫,则上行到3楼后,停5秒后,继续上行到4F后停止(6)当电梯停于1楼1F时,2F、4F同时呼叫,则上行到2楼,停5秒后,继续上行到4F后停止(7)当电梯停于1楼1F时,2F、3F、4F同时呼叫,则上行到2楼,停5秒后,继续上行到3F后,停5秒后,继续上行到4F后停止。
(8)当电梯停于2楼2F时,3F、4F同时呼叫,则上行到3楼,停5秒后,继续上行到4F后停止。
2、电梯下行(1)当电梯停于4F或3F、2F时,1F呼叫,则下行到1F后,碰到行程开关后停止。
(2)当电梯停于4F或3F时,2F呼叫,则下行到2F后,碰到行程开关后停止。
(3)当电梯停于4F时,3F呼叫,则下行到3F后,碰到行程开关后停止。
(4)当电梯停于4F时,3F、2F同时呼叫,则下行到3F后,停5秒后,继续下行到2F后停止。
(5)当电梯停于4F时,3F、1F同时呼叫,则下行到3F后,停5秒后,继续下行到1F后停止。
(6)当电梯停于4F时,2F、1F同时呼叫,则下行到2F后,停5秒后,继续下行到1F后停止。
(7)当电梯停于4F时,3F、2F、1F同时呼叫,则下行到3F后,停5秒后,继续下行到2F后,停5秒后,继续下行到1F后停止。
(8)当电梯停于3F时,2F、1F同时呼叫,则下行到2F后,停5秒后,继续下行到1F后停止。
3、各楼层运行时间应在15秒以内,否则认为有故障。
PLC 梯形图程序

用“经验设计法”编写PLC 梯形图程序宁波技师学院电气系王柏华一、经验设计法简介梯形图程序设计是可编程控制器应用中最关键的问题,PLC 梯形图程序设计常用方法有: 经验设计法、顺序控制设计法和逻辑代数设计法等。
PLC 梯形图程序用“经验设计法”编写, 是沿用了设计继电器电路图的方法来设计梯形图, 即在某些典型电路的基础上, 根据被控对象对控制系统的具体要求, 不断地修改和完善梯形图。
有时需要多次反复地进行调试和修改梯形图, 不断地增加中间编程元件和辅助触点, 最后才能得到一个较为满意的结果。
因此, 所谓的经验设计法是指利用已经的经验( 一些典型的控制程序、控制方法等), 对其进行重新组合或改造, 再经过多次反复修改, 最终得出符合要求的控制程序。
这种设计方法没有普遍的规律可以遵循, 具有很大的试探性和随意性, 最后的结果也不是唯一的, 设计所用的时间、设计质量与设计者的经验有很大的关系, 因此有人就称这种设计方法为经验设计法, 它是其他设计方法的基础, 用于较简单的梯形图程序设计。
用经验设计法编程, 可归纳为以下四个步骤:(1) 控制模块划分( 工艺分析) 。
在准确了解控制要求后, 合理地对控制系统中的事件进行划分, 得出控制要求有几个模块组成、每个模块要实现什么功能、因果关系如何、模块与模块之间怎样联络等内容。
划分时, 一般可将一个功能作为一个模块来处理, 也就是说, 一个模块完成一个功能。
(2) 功能及端口定义。
对控制系统中的主令元件和执行元件进行功能定义、代号定义与I/O 口的定义( 分配), 画出I/O 接线图。
对于一些要用到的内部元件, 也要进行定义, 以方便后期的程序设计。
在进行定义时, 可用资源分配表的形式来进行合理安排元器件。
(3) 功能模块梯形图程序设计。
根据已划分的功能模块, 进行梯形图程序的设计, 一个模块, 对应一个程序。
这一阶段的工作关键是找到一些能实现模块功能的典型的控制程序, 对这些控制程序进行比较, 选择最佳的控制程序( 方案选优), 并进行一定的修改补充, 使其能实现所需功能。
PLC车库出入管理系统

电气控制和PLC课程设计说明书题目:车库车辆出入库管理专业班次:自动化1004班姓名:刘@@学号:**********************指导教师:***学期:2012-2013学年第一学期日期:2012.12目录摘要 (1)1 引言 (1)1.1和本课题有关的国内外研究现状 (1)1.2 PLC的基本结构 (3)1.3 PLC的工作原理 (4)1.4 PLC发展新动向 (4)1.5 PLC发展历史 (5)1.6 PLC的选型 (6)2.1 技术参数和条件 (6)2.2 整体方案设计 (7)3 系统的硬件设计及端口分布 (7)3.1 整体框架 (7)3.2 传感器型号参数 (7)3.3 IC卡检测仪 (9)3.4 PLC选型及I/O点分配 (9)3.5 PLC输入电路设计 (9)3.5.1 车辆检测器 (9)3.5.2 输入接口电路 (10)3.6 PLC输出电路设计 (10)3.7 系统整体框图 (10)3.8 光传感器的布置方案 (10)3.9 I/O 口地址分配 (11)4 程序设计 (12)4.1 控制要求 (12)4.2 程序流程图 (12)4.3 计数逻辑 (12)4.4 梯形图 (13)结束语 (16)摘要介绍了PLC在立体停车库中的使用,详细讨论了整个控制系统的功能以及硬件和软件设计。
关键词:PLC 光传感器可靠性车辆1 引言随着城市经济的腾飞,停车难已到了刻不容缓的地步。
在寸土寸金的市中心,特别是宾馆、商场、购物中心等车辆集中的地区,只有向空中、向地下发展,建造相当数量的立体停车库已是必不可少。
1.1和本课题有关的国内外研究现状随着汽车数量的激增,我国城市交通压力大大增加,迫切需要新建、扩建和改建相应的城市道路、交通管理设施以及各类停车设施。
据有关方面统计,截止2008年统计,我国生产汽车934.5万辆,同比增长5.2%,我国国内汽车销量为938.05万辆,同比增长6.7%。
(电气控制与PLC)第八章梯形图程序设计方法
I0.0 I0.1 I0.2 Q0.1 Q0.0
Q0.0 I0.1 I0.0 I0.2 Q0.0 Q0.1
Q0.1
2020/7/21
福州大学电气工程与自动化学院
10
提纲
1. 经验设计法 2. 顺序控制设计法与顺序功能图 3. 基于顺序功能图的梯形图设计方法
2020/7/21
福州大学电气工程与自动化学院
I0.1 I0.0 I0.3 I0.2 Q0.0 Q0.1 I0.4 Q0.1
PLC的外部接线图
小车自动往返的梯形图
福州大学电气工程与自动化学院
9
经验设计法——总结
❖ 将继电器电路转换为梯形图 1. 确定PLC的输入/和输出信号。 2. 画PLC的外部接线图 • 启动/停止一般使用常开按钮 • 互锁使用常闭开关 3. 控制线路图 >> 梯形图 4. 注意互锁环节
2. PLC内部的信号,如定时 器、计数器等
3. 多个信号的逻辑组合 (P79,图4-11)
福州大学电气工程与自动化学院
11
顺序控制设计法与顺序功能图
2020/7/21
动力头控制的 顺序功能图
福州大学电气工程与自动化学院
12
顺序控制设计法与顺序功能图
顺序控制设计法 ❖ 首先根据系统的工艺过程,画出顺序功能图 ❖ 然后根据顺序功能图编写梯形图程序。 ✓ 部分PLC提供了顺序功能图编程语言,用户在编程 软件中生成顺序功能图后便完成了编程工作,如西门 子S7-300/400 PLC中的S7 Graph编程语言。 ✓ 容易被初学者接受,对于有经验的工程师,也会提 高设计的效率,程序的调试、修改和阅读也很方便。
步
有 向 连 线
初始步
与步对应的 动作/命令
PLCS7-200立体车库毕业设计(带有上位机及梯形图程序)
学校代码:学号:毕业论文(设计) BACH ELOR DISSERTATION论文题目:基于PLC立体车库控制系统的设计学位类别:工学学士学科专业:自动化1班作者姓名:导师姓名:完成时间:基于PLC的立体车库控制系统的设计中文摘要随着我国经济的飞速发展,城市人口日益增多,特别是随着改革开放以来,我国进入了汽车拥有率迅速上升时候。
以往那种单层平面停车场也越来越不能满足市场的需求。
对多停车位、少占空间、使用操作简单、安全可靠的“立体停车库”的建设,是解决目前寸土寸金的大都市内停车难的有效办法。
本设计基于PLC控制,同时利用下位机与上位机通讯,在上位机上进行实时监控立体车库运行,升降横移立体停车库车位结构为M*N的2维矩阵形式,M为层,N为列,可设计为多层、多列。
现在设计为3层*3列车库。
本设计软件部分是基于SETP7 Micro/WIN开发环境,采用梯形图进行程序编写。
硬件部分是基于上位机MCGS组态环境及下位机硬件试验箱完成的。
毕业设计结果表明:该系统可以实现空车车位号的LED显示,并且LED显示实现了优先选择空车位的功能,即1号车位优先于2号、2号优先于3号,以此类推。
上位机上可以实现车位的升降横移功能。
关键词:PLC;立体车库;组态软件;S7-200;监控系统The design of general multi-layered fluctuation three-dimensional garagecontrol system based on PLCABSTRACTWith the rapid development of China's economy,increasing urban population, especially with the reform and opening up, China has entered a rapid increase in car ownership in time. Single-plane parking lot in the past that can not meet market demand. On more parking spaces, less space, use a simple, safe and reliable "parking" of the building, is solve the high cost of land within the city parking is difficult and effective way.The design is based on PLC control, while use of lower computer and the host computer communication, the host computer on a real-time monitoring parking operation, lifting and transferring parking parking structure for the M * N 2-dimensional matrix, M for the layer, N is the column can be designed for the multi-layer, multi-column.Now is designed to 3 * 3. Part of this design software is based on SETP7 Micro / WIN development environment for programming using ladder. Hardware configuration is based on PC MCGS environment and lower computer hardware test chamber complete.Graduation results show that: the system can empty parking space number LED display and LED display of the priority function of empty parking spaces, that parking space No. 1 priority 2, priority 2, 3, and so on. PC can be achieved on the function of lifting and transferring of parking spaces.Keywords: PLC; parking; configuration software;S7-200;Monitoring System目录第一章前言 (1)1.1本课题研究的主要意义 (1)1.2 发展的现状及前景展望 (1)1.3本课题的主要任务及结构组织 (3)第二章立体车库系统设计 (5)2.1 立体车库系统功能设计 (5)2.2 立体车库系统结构的设计 (5)2.3 系统方案设计及选择 (6)2.3.1方案的设计 (6)2.3.2 方案的选择 (7)第三章立体车库的软件系统设计及实现 (7)3.1 PLC概述 (7)3.1.1 PLC的基本结构 (9)3.1.2 PLC的编程语言 (12)3.2 西门子S7-200 (16)3.3 STEP7-Micro/WIN软件的使用及编程规则 (16)3.3.1 STEP7-Micro/WIN的使用 (16)3.3.2 STEP7-Micro/WIN的编程规则 (19)3.4 软件系统设计 (19)3.4.1 输入输出分配表 (19)3.4.2 I/O接线图 (20)3.4.3 顺序功能图 (20)3.4.4 梯形图 (21)第四章立体车库的硬件设计及实现 (22)4.1 MCGS组态软件的介绍 (22)4.2 MCGS组态设计 (24)4.2.1 用户窗口设计 (24)4.2.2 设备窗口设计 (25)4.2.3实时数据库 (28)4.2.4 组态画面与下位机关联 (29)4.3 硬件实验箱设计 (31)第五章立体车库系统的调试与分析 (32)5.1 调试结果及分析 (32)5.2 出现的问题及解决方法 (33)第六章结束语及展望 (33)参考文献 (34)致谢 (35)附录(梯形图) (36)第一章前言1.1本课题研究的主要意义自动化立体车库系统是指在不需要人工干预的情况下,运输设备能自动存储和取出车辆的多层车库存储系统。
收藏!PLC经典实例梯形图
收藏!PLC经典实例梯形图1、自动送料装车控制梯形图(步进指令编程)
2、自动送料装车控制梯形图(基本逻辑指令编程)
3、三相异步电动机的三种梯形图
4、物料自动混合控制梯形图(用基本逻辑指令)
5、三种物料自动混合控制梯形图
6、物料自动混合控制梯形图(用步进指令)
7、三相步进电机控制梯形图
8、送料车控制的梯形图(用功能指令控制)
9、送料车控制的梯形图(用基本逻辑指令控制)
10、电梯控制梯形图
11、典型计数器应用梯形图
来源:互联网,技成培训。
原文如有错误请指正!。
plc编程例题

例题一停车场车辆出入管理PLC梯形图控制程序设计1.控制要求:如图所示,当停车场内车辆少于10辆时,指示灯绿灯亮;如果有车要进入停车场,则入口栏杆抬起;车进入停车场后,左栏杆落下。
出车时,右侧栏杆抬起,车从停车场右侧出,出车后10 s栏杆落下。
停车场内最多能停10辆车,达到10辆车后,指示灯红灯亮,入口栏杆不会再抬起。
其中,B1、B2、B3为传感器。
2.I/O编址,编程并调试。
3.思考:若把停车场改为停车库,其管理要求如下,应该如何设计考虑?(1)控制要求:①入库车辆前进时,经过1#传感器→2#传感器后,计数器A加1,后退时经过2#传感器→1#传感器后,计数器B减1;(计数器B的初始值由计数器A送来)只经过一个传感器则计数器不动作。
②出库车辆前进时,经过2#传感器→1#传感器后,计数器B减1,后退时经过1#传感器→2#传感器后,计数器A加1;只经过一个传感器则计数器不动作。
③车辆入库或出库时,均应有警铃报警(可分别设置),定时3s 。
④仓库启用时,先对所有用到的存储单元清零,并应有仓库空显示。
⑤若设仓库容量为50辆车,则仓库满时应报警并显示。
⑥若同时有车辆相对入库和出库(即入库车辆经过1#传感器,出库车辆经过2#传感器),应避免误计数。
流程图:(一)基础控制部分变量名类型说明X0 BOOL 开始on BOOL 正常运行reast BOOL停止/复位green BOOL正常运行灯red BOOL满b1 BOOL入口传感器B3 BOOL出口传感器2.梯形图3.I/O地址分配图4.运行过程分析:当入口传感器b1触发时,入口延时开关b1_long打开,直至计时10s后栏杆落下,同时加减计数器加1。
当入口传感器b3触发时,出口延时开关b3_long打开,直至计时10s后栏杆落下,同时加减计数器减1。
当计数器加满10个后,红灯亮,停车场满,不可以再进入。
(二)思考部分1.变量声明表:同基础部分类似。
2.I/O地址分配图3.流程图4.梯形图部分:5.Automation Basic 部分:6.运行过程分析整个系统采用LAD语言及Automation Basic语言结合的方式建立。
PLC控制的车辆出入库管理梯形图控制程序
目录一、实习目的 (1)目录 (1)一、实习目的 (3)使我们在实习的过程中详细了解PLC的功用及其原理,为以后的实习工作打下良好的基础,也为即将到来的毕业设计奠定下坚实的基础 (3)4.梯形图 (6) (6)5. 设计原理 (8)三、实习总结 (8)一、实习目的使我们在实习的过程中详细了解PLC的功用及其原理,为以后的实习工作打下良好的基础,也为即将到来的毕业设计奠定下坚实的基础随着生产力和科学技术的不断发展,人们的日常生活和生产活动大量的使用自动化控制,不仅节约了人力资源,而且很大程度的提高了生产效率,又进一步的促进了生产力快速发展,并不断的丰富着人们的生活。
目前,可编程控制器PLC主要是朝着小型化、廉价化、标准化、高速化、智能化、大容量化、网络化的方向发展,与计算机技术相结合,形成工业控制机系统、分布式控制系统DCS(Distributed Control System)、现场总线控制系统FCS(Field bus Control System),这将使PLC的功能更强,可靠性更高,使用更方便,适用范围更广。
本设计是基于PLC的车辆出入库管理系统,采用两位LED来显示车库内车辆的实际数量。
使用两个光传感器来监控车辆的进出并完成计数工作,车辆进入时经过两个传感器使显示数字加一,车辆外出时经过两个传感器使显示数字减一,但当车辆只经过一个传感器时不计数。
为了防止意外计数错误,本系统采用反复程序校验,来提高系统的可靠性。
首先,注意控制两个传感器之间的距离,用程序验证进出车库的是否是车辆,当人通过传感器时不计数;其次,采用逻辑互锁方式,启动加计数则要锁定减计数,产生加计数脉冲时则要锁定减计数脉冲,如此以保证可靠性;最后,及时的进行复位处理,以免车辆在传感器附近作往返运动时错误计数。
二、实习内容1.控制要求:题目编号:16编制一个用PLC控制的车辆出入库管理梯形图控制程序1)入库车辆前进时,经过1#→2#传感器后计数器加1,后退时经过2#→1#传感器后计数器减1,单经过一个传感器则计数器不动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一、实习目的 (1)二、实习内容 (1)1.控制要求 (1)2.PLC的I/O端口接线 (2)3.I/O 口地址分配 (3)4.梯形图 (4)5.设计原理 (6)三、实习总结.....................................................................................错误!未定义书签。
四、PLC设计论文 (7)一、实习目的使我们在实习的过程中详细了解PLC的功用及其原理,为以后的实习工作打下良好的基础,也为即将到来的毕业设计奠定下坚实的基础随着生产力和科学技术的不断发展,人们的日常生活和生产活动大量的使用自动化控制,不仅节约了人力资源,而且很大程度的提高了生产效率,又进一步的促进了生产力快速发展,并不断的丰富着人们的生活。
目前,可编程控制器PLC主要是朝着小型化、廉价化、标准化、高速化、智能化、大容量化、网络化的方向发展,与计算机技术相结合,形成工业控制机系统、分布式控制系统DCS(Distributed Control System)、现场总线控制系统FCS(Field bus Control System),这将使PLC的功能更强,可靠性更高,使用更方便,适用范围更广。
本设计是基于PLC的车辆出入库管理系统,采用两位LED来显示车库内车辆的实际数量。
使用两个光传感器来监控车辆的进出并完成计数工作,车辆进入时经过两个传感器使显示数字加一,车辆外出时经过两个传感器使显示数字减一,但当车辆只经过一个传感器时不计数。
为了防止意外计数错误,本系统采用反复程序校验,来提高系统的可靠性。
首先,注意控制两个传感器之间的距离,用程序验证进出车库的是否是车辆,当人通过传感器时不计数;其次,采用逻辑互锁方式,启动加计数则要锁定减计数,产生加计数脉冲时则要锁定减计数脉冲,如此以保证可靠性;最后,及时的进行复位处理,以免车辆在传感器附近作往返运动时错误计数。
二、实习内容1.控制要求:题目编号:16编制一个用PLC控制的车辆出入库管理梯形图控制程序1)入库车辆前进时,经过1#→2#传感器后计数器加1,后退时经过2#→1#传感器后计数器减1,单经过一个传感器则计数器不动作。
2)出库车辆前进时经过2#→1#传感器后计数器减1,后退时经过1#→2#传感器后计数器加1,单经过一个传感器则计数器不动作。
3)设计一个由两位数码管及相应的辅助元件组成的显示电路,显示车库内车辆的实际数量。
变量约定:10001--启动10006---1#传感器10002--停止10007--2#传感器 10003--清零 0001--仓库显示空 10004--=“1”入库操作10004--=“0"出库操作 10005--=”1“前进操作 10005--=”0“后退操作2.PLC接线图4.梯形图5.设计原理1.光传感器的接收光被遮断时定义为“有信号”;2.传感器1#有信号时启动增计数逻辑;3.传感器2#有信号时启动减计数逻辑;4.传感器1#完成脉冲同时2#有信号,则启动增计数逻辑;5.传感器2#完成脉冲同时1#有信号,则启动减计数逻辑;6.传感器1#和传感器2#都完成脉冲后进行相应计数动作;7.传感器1#和传感器2#都没有信号时进行小复位动作;8.增计数与减计数的启动逻辑互锁;9.增计数和减计数的进行逻辑互锁。
10.计数值超过+99后从零开始计数并报警(发光二极管)其中:条件2和条件3为“方向判定条件1”;条件4和条件5为“方向判定条件2”;三、实习总结本设计采用光传感器采集信号,使用完全PLC控制,完成了车辆出入库时的统计和显示工作,能够可靠的准确的无误的进行计数,无论单个车辆怎样的往返运动,都不会出现误计数和漏计数,而且在人通过光传感器时不会误计数。
最后采用两个LED做显示,能够显示车库内车辆的实际数量。
优点:本系统采用反复逻辑判定,计数动作准确可靠;设备简单安装方便;自动化程度高便于实现无人值守;抗干扰能力强,环保无污染;便于需要时进行扩展。
缺点:PLC的输出口资源有点过于浪费。
PLC实习论文实习虽然时间不长,但每天都在不断接受新知识、开阔新视野可编程控制器是集计算机技术、自动控制技术、通信技术为一体的新型自动控制装置。
由于它可通过软件来改变控制过程,而且具有体积小、组装维护方便、编程简单、可靠性高、抗干扰能力强等特点,已广泛应用于工业控制的各个领域,是现代工业自动化三大支柱之一。
随着技工教育的发展,为了适应PLC日益广泛应用形势,近几年,许多技工学校都开设了PLC这门课程。
技工学校专业课程在理论要求方面难度不亚于大专院校,而技校层次的学生基础较薄弱,且近年生源素质不断下降,增加了技校教师的教学难度。
另一方面,在新技术的专业课教材使用方面,没有成熟、统一的技校配套教材。
如何在技工学校教好这门课程?现在笔者结合本人的教学实践,谈谈PLC教学的一些见解。
《PLC原理及应用》课程具有多变性、综合性、典型性、实践性和实用性五大教学特点,在教学过程中,既有一般又有特殊,既有新授又有复习,既有理论又有实训,既有工作原理又有编程方法,既有典型单元程序又有复杂实用案例,同时技工学校的学生又是一个学习基础、习惯和动机差异很大的群体。
这就决定了我们技工学校的教师一定要根据本课程不同教学内容及其特点,采取不同的教学方法,同时,无论是理论教学还是实践教学,我们教师还要努力做到因材施教,在如何充分调动广大学生学习积极性和发挥广大学生主观能动性上多下功夫。
但调查研究发现,目前担任《PLC原理及应用》的很多教师采取的是“一言堂”和“填鸭式”的教学,势必也就造成了“言者津津,听者昏昏”的教学局面。
《PLC原理及应用》课程教学上,尤其是PLC指令及应用、编程方法和实际应用等教学内容上,最适宜于采取双边互动式教学方法。
在教学中,大胆引入“行为引导学”教学方法。
为了搞好双边互动式教学,就要求我们教师在备课时把教材上静态的知识转化为课堂上动态的教学信息,并且在教学过程中要想方设法地创造出一个可以实现双边互动式教学的环境和气氛,通过创设情境、巧整理]设疑问、共同讨论、动手实践等多种教学方式,有效地开展双边互动式教学。
不仅是老师传授给学生编程方法等,同时学生可以通过老师给出的任务书,从各方面获取资料,充分发挥学生的想象。
这样不仅培养了学生的思维能力,而且在完成任务书的同时,不自觉地学会了解决问题的方法,在这过程中还增强了学生之间信息交流。
例如:在介绍了一些基本指令后,让每个组的学生自己讨论这些指令能解决的基本电力拖动问题,并动手画有关的图片,有条件的可以用相机拍或者从网上下载与PLC应用有关的机床拖动图片,连成一幅作品,完成后粘贴在班级教室内,供学生参观他们所做的成我们知道,用于教学的PLC教材,在编写时一般是按照:基本原理、基本指令、基本应用、基本操作等分成各个独立的章节。
编者按照结构严谨性进行编书,教师实施教学时,则要考虑有利于学习者的认知过程而开展教学。
这是教材使用者要注意处理好的问题。
如果任课老师按照教材的顺序进行教学,就是要将全部基本指令学习完毕,再学习基本应用,基本学习完毕再进行基本操作的学习。
这样,在一段期间内学习完所有指令,学生学习后的印象不深刻,容易混淆,到基本应用的学习时,又得重新对所涉及的指令进行学习,效率不高。
所有理论学习完后,才进行基本操作,不能互得益障,教学效果不好。
为此,我在PLC教学中采用了课题式单元教学,重新自编教学内容。
任课老师通过多种途径搜集了上百个PLC应用实例,并通过筛选、整合成五个单元,每个单元由几个同类实例组成。
每个课题以一个应用实例为主题,其内容包括了:应用实例的生产目的,生产条件和生产环境的介绍,用PLC实现控制的线路,所用的基本指令,编程方法、调试应用。
由几个应用同类指令的实例课题组合成为一个教学单元,全部教学内容分为五个教学单元。
五个单元主题分别是PLC原理、时序控制、计数控制、位置控制和特殊功能综合应用。
单元内的课题按照其难易程度安排教学的先后顺序。
第一单元有电机的点动控制、电动机的连续控制、电机的正反转控制、电机的手动Y-Δ控制、抢答器控制系统、数学显示控制系统这六个实例作为对PLC工作原理部分的学习(其中也包含几个最简单指令的学习)。
第二单元以电机自动Y-Δ降压启动控制、两灯来回闪亮循环控制、多台电机顺序控制、货物传输带控制系统等四个实例为学习对象,学习按时间顺序控制的原理及应用。
从以上列举的两个单元可知,任课老师精选设计的每个实例课题有一定的科学性、连贯性,由简到繁、由易到难。
目前在《PLC原理及应用》课程实践教学上,由于我们教师所编写的实训指导书详尽有余,明明白白,加之所做的实习实训都是“简单验证式”或“机械重复式”方面的项目,在一定程度上为学生“依葫芦画瓣”提供了方便,学生在实习实训时只需要进行程序输入、线路连接等简单操作即可顺利完成。
这种实习实训教学方法,目前已被我们教师广泛认可和采用,但至少我认为:没有问题的、不需学生动脑的实习实训是毫无意义的。
对于与PLC技术应用密切配合的实习实训教学,教师只有指导学生运用PLC编程方法亲自编程操作,在实习实训中既动手又动脑,既能发现问题又能在教师启发指导下分析问题和解决问题,才能从本质上学好这门课程,从而最终实现本课程在技工学校的教学目标,我们教师应该根据企业对PLC技术人才的需求,结合学校实际设备情况,针对技工学校本课程教学特点和教学目标,在如何引导广大学生在实习实训中既动手又动脑上多下功夫。
技工学校是一个学生学习基础、动机和习惯差异很大的群体,因此实习实训教学同样要做到因材施教,采取因人而异的分层教学,即按学生学习能力分组,确定每组不同的实习实训目标,从而使成绩好的和成绩差的学生在实习实训中,都能够得到相应的锻炼和培养。
除要求学生在规定时间做完基本的实习实训项目外,还要安排一定量的选修实验项目和研究性课题,让广大学生自主选择,教师现场指导,或者督而不导,从而促使学生自主地分析在实习实训中所遇到的问题,写出实验报告交教师评判,师生共同找出问题的解决办法。
对于大型的实训项目,如电梯、机械手等,还可以采取分工合作的教学形式,将全班同学分成不同的小组,由教师明确各小组在实训中的任务和目标,从而培养广大学生团结协作的职业素质和能力每个课题以实例为重点,这些实例都是来自我们身边的生活、生产。
学生对教学课题感兴趣,认识到所学的东西有用,能解决现实问题,学习热情是自然地高涨起来。
兴趣是最好的老师,主要能调动学生的兴趣,学习效果肯定不懒。
兴趣是学生主动学习的动力之一,他们对学习的追求往往来源于兴趣。
凡是有兴趣的东西,就容易激发学生的学习热情,引起学生的思考,学生若能有兴趣地学,教学就成功了一半。