tiezai wenxian timing
SICK_RFU6XX_PNDP_V2_00_DE

BetriebsanleitungSICK RFU6XX PNDP Funktionsbaustein für Siemens Step7 SteuerungenInhaltsverzeichnis1 Zu diesem Dokument (3)1.1 Funktion dieses Dokuments (3)1.2 Zielgruppe (3)2 Allgemeines (4)3 Hardwarekonfiguration (5)3.1 Unterstützte SPS-Steuerungen (5)3.2 Unterstützte Feldbus Gateways / Sensoren (5)3.3 Konfiguration in Step7 (5)4 Bausteinbeschreibung (7)4.1 Bausteinspezifikationen (7)4.2 Arbeitsweise (8)4.3 Verhalten im Fehlerfall (9)4.4 Timing (9)4.5 Werteübergabe (10)4.5.1 Mode (11)4.5.2 Mode 1: SOPAS-ET Objekttriggersteuerung (11)4.5.3 Mode 1: SOPAS-ET Ausgabeformat (12)4.5.4 Read Tag (14)4.5.5 Write Tag (15)4.5.6 Free Command (17)4.5.7 Reading Result (18)4.6 Empfangen von Leseergebnissen > 200 Byte (18)5 Parameter (20)6 Fehlercodes (23)7 Beispiele (26)7.1 Auslesen von Tag-Inhalten (27)7.2 Schreiben von Tag-Inhalten (28)1 Zu diesem DokumentBitte lesen Sie dieses Kapitel sorgfältig, bevor Sie mit dieser Betriebsanleitung und den SICK RFU6xx Funktionsbaustein arbeiten.1.1 Funktion dieses DokumentsDiese Betriebsanleitung beschreibt den Umgang mit dem SICK RFU6XX PNDP Funktions-baustein. Sie leitet das technische Personal des Maschinenherstellers bzw. Maschinenbe-treibers zur Projektierung und Inbetriebnahme des Funktionsbausteins an.1.2 ZielgruppeDiese Betriebsanleitung richtet sich an fachkundiges Personal wie z.B. Techniker oder Inge-nieure.2 AllgemeinesDer Funktionsbaustein …SICK RFU6XX PNDP“ wird zur Kommunikation zwischen einer SIMATIC Steuerung und einem SICK RFU6xx RFID Sensor verwendet.Die folgende Abbildung zeigt die Darstellung des Funktionsbausteins in der Funktionsplan-Ansicht (FUP).Abbildung 1: SICK RFU6XX PNDP FunktionsbausteinBausteinfunktionalitäten:- Senden eines Triggerbefehls (CoLa i Kommando) über die SPS- Empfang von Leseergebnissen (im SOPAS-ET ii Ausgabeformat definiert)- Lesen und Schreiben von Transponder-Inhalten- Ausführen eines Kommunikationstests- Kommunikation über frei wählbare CoLa Kommandos (CoLa-A Protokoll)- Ansprechen von Geräten, die untereinander via CAN-Bus kommuniziereniDie Command Language (CoLa) ist ein internes SICK Protokoll zur Kommunikation mit SOPAS-GeräteniiSOPAS-ET ist ein Engineering Tool zum parametrieren von SICK Sensoren3 Hardwarekonfiguration3.1 Unterstützte SPS-SteuerungenDer Funktionsbaustein darf nur mit Simatic S7-Steuerungen der 300er und der 400er Familie betrieben werden. Es werden nur Steuerungen unterstützt, die die verwendete Feldbus-schnittstelle integriert haben. Die Kommunikation über einen Kommunikationsprozessor wird von diesem Baustein nicht unterstützt.3.2 Unterstützte Feldbus Gateways / SensorenDer SICK Sensor kommuniziert über einen Feldbus (Profibus/Profinet) mit der Steuerung. Sollte der Sensor die oben genannten Feldbusse nicht unterstützen, können Gateway-Module eingesetzt werden.Folgenden Gateways werden vom Funktionsbaustein unterstützt:- CDM 425 (Profinet), ab Firmware Version V3.31- CDF 600 (Profibus), ab Firmware Version V1.15- CDM 420 inkl. CMF400 Profibus Modul, ab Firmware Version V1.100Notwendige RFU Firmware Version:- RFU6xx, ab Firmware Version V1.303.3 Konfiguration in Step7Bevor der Funktionsbaustein verwendet werden kann, muss in der Step7 Hardwarekonfigu-ration der RFU entsprechend projektiert werden. Hierfür muss die entsprechende Gerä-testammdatei (GSD-Datei) in die Step7 Hardwarebibliothek importiert werden.Der Funktionsbaustein ist speziell für den Handshake-Mode ausgelegt. Bitte nur HS-Module mit einer Länge zwischen 8I128 Bytes verwenden. Die verwendeten Adressen dürfen im Peripheriebereich oder außerhalb projektiert werden. Eine Adresszuweisung auf Peripherie-bereiche, denen ein Teilprozessabbild mit OB6x-Anbindung (Taktsynchronalarme) zugeord-net ist, darf nicht verwendet werden.Abbildung 2 zeigt eine Beispielprojektierung des RFUs.Abbildung 2: Step7 Hardwarekonfigurationsbeispiel4 BausteinbeschreibungDer Funktionsbaustein ist ein asynchron arbeitender FB, d. h. die Bearbeitung erstreckt sich über mehrere FB-Aufrufe. Dies setzt voraus, dass der Baustein zyklisch im Anwenderprogramm aufgerufen wird.Der RFU6 Baustein kapselt den Funktionsbaustein …SICK CCOM PNDP“ (FB10), der die Kommunikation zwischen SPS und Sensor ermöglich. Der FC10 (SICK COLA ACCESS) wird intern zur Interpretation der CoLa-Telegramme verwendet.4.1 BausteinspezifikationenBausteinnummer: FB74Bausteinname: SICK RFU6XX PNDPVersion: 2.0Aufgerufene Bausteine: SFC 14 (DPRD_DAT)SFC 15 (DPWR_DAT)SFC20 (BLKMOV)SFB4 (TON)FB10 (SICK CCOM PNDP)FC10 (SICK COLA ACCESS)Verwendete Datenbausteine: DB74 (SICK RFU DATA)Bausteinaufruf: ZyklischVerwendete Merker: keineVerwendete Zähler: keineVerwendetet Register: AR1, AR2 (für Multiinstanzaufruf)Muliinstanzfähig: jaErstellsprache: Step7-AWLStep7 Version: Simatic Step7 V5.5Die im Funktionsbaustein verwendeten Systemfunktionen (SFCs) müssen auf der jeweils verwendeten Steuerung vorhanden sein.Beim ändern von Bausteinnummern müssen die entsprechenden Aufrufe im SICK RFU6XX PNDP Baustein aktualisiert werden.4.2 ArbeitsweiseUm den RFU Baustein einsetzen zu können, müssen zunächst die folgenden Kommunikati-onsparameter angegeben werden:IN_ADDR: Projektierte Anfangsadresse aus dem E-Bereich des verwendeten Input-Moduls. Die Eingangsadresse wird mit der Hardwareprojektierung festgelegt (siehe Kapitel 3.3). Der Wert muss im Hexadezimalformat angegeben werden (z.B. Adresse 256 = W#16#100).IN_LEN: Länge des verwendeten Input-Moduls in der Hardwarekonfiguration. Die Länge des Eingabemoduls wird mit der Hardwareprojektierung festgelegt (siehe Kapitel 3.3).OUT_ADDR: Projektierte Anfangsadresse aus dem A-Bereich des verwendeten Output-Moduls. Die Ausgangsadresse wird mit der Hardwareprojektierung festgelegt (siehe Kapitel siehe Kapitel 3.3). Der Wert muss im Hexadezimalformat angegeben werden (z.B. Adresse 256 = W#16#100).OUT_LEN: Länge des verwendeten Output-Moduls in der Hardwarekonfiguration. Die Länge des Ausgabemoduls wird mit der Hardwareprojektierung festgelegt (siehe Kapitel siehe Kapi-tel 3.3).DATA: Der zum Funktionsbaustein gehörende Datenbaustein (DB74) beinhaltet Ein- und Ausgabeparameter der unterstützten Bausteinaktionen. Der Datenbaustein muss dem Ein-gangsparameter …DATA“ des Funktionsbausteins übergeben werden.Ausführbare Bausteinfunktionen:- Trigger on Öffnet das Lesetor des Gerätes per CoLa Kommando- Trigger off Schließt das Lesetor des Gerätes per CoLa Kommando- Read Tag Auslesen von Transponderdaten- Write Tag S chreiben von Transponderdaten- Kommunikationstest Prüft, ob das Gerät per …sRI0“ Kommando erreichbar ist- Free Command Ausführen eines frei wählbaren CoLa KommandosUm eine Bausteinaktion (TRIG_ON, RD_TAG, etc.) auszuführen, muss zunächst die ge-wünschte Aktion ausgewählt werden. Es kann immer nur eine Aktion gleichzeitig ausgeführt werden. Um die Aktion auszuführen, muss der Parameter START_REQ mit einer positiven Flanke (Signalwechsel von logisch null auf eins) angetriggert werden. Solange noch keinegültige Geräteantwort empfangen wurde, wird dies über den Parameter REQ_BUSY signali-siert.Wenn der Baustein am Ausgangsparameter REQ_DONE = TRUE signalisiert, wurde die Aktion erfolgreich durchgeführt. Wurden bei dieser Aktion (z.B. RD_TAG) Daten vom Gerät angefordert, werden diese in den jeweiligen Datenbereich des zugehörigen Nutzdatenbau-steins (DATA) kopiert.Daten die per Triggerbefehl (TRIG_ON, TRIG_OFF) oder direkt vom Gerät gesendet werden (z.B. direkter Trigger über eine Lichtschranke), werden in den Datenbaustein (ReadingRe-sult.arrResult) abgelegt. Der Ausgangsparameter RD_DONE zeigt für einen SPS Zyklus an, dass neue Daten empfangen wurden. Die vom Gerät gesendeten Daten können im SOPAS Ausgabeformat geändert, bzw. angepasst werden (siehe Kapitel 4.5.3).4.3 Verhalten im FehlerfallBei einem fehlerhaften Eingabewert oder einer fehlerhaften Eingangsbeschaltung des FBs, wird ein Errorbit (ERROR) gesetzt und ein Fehlercode (ERRORCODE) ausgegeben. In die-sem Fall wird keine weitere Bearbeitung durchgeführt. Die Diagnoseparameter (ERROR, ERRORCODE) des FBs behalten solange ihren Wert, bis ein neuer Auftrag gestartet wird.Über das RESET Bit ist es möglich, die Kommunikation zwischen dem Sensor und der SPS zurückzusetzen. Der Reset-Befehl wird ausgeführt, sobald das RESET Bit vorgewählt und das START_REQ Bit mit einer positiven Flanke (Signalwechsel von null auf eins) angetrig-gert wird. Das REQ_BUSY Bit signalisiert, dass der Befehl bearbeitet wird. Ist die Reset-Routine abgeschlossen, wird das REQ_DONE Bit gesetzt.Durch das Rücksetzen werden folgende Aktionen ausgeführt:- Rücksetzen der Counter vom Confirmed Messaging Protokoll (Gerätekommunikation)- Rücksetzen aller Fehlermeldungen4.4 TimingAbbildung 3: Timing Diagramm1: Anforderung durch Pos Flanke an START_REQDie gewünschte Aktion (hier RD_Tag) muss vorher/zeitgleich ausgewählt werden. Es darf nur eine Aktion zeitgleich ausgewählt werden, sonst wird mit …ERROR“ abgebrochen.2: Wenn alle Kommandos gesendet sind und alle Antworten empfangen wurden, wird die Aktion mit …REQ_Done“ beendet. Wenn die Aktion fehlerhaft verläuft, wird mit …ERROR“ beendet. Bei Abbruch mit …ERROR“ enthält …ERRORCODE“ den aufgetretenen Fehler.4.5 WerteübergabeDer mitgelieferte Datenbaustein …SICK RFU DATA“ (DB74) beinhaltet Ein- und Ausgabepa-rameter aller unterstützten Bausteinaktionen. Der Datenbaustein kann je nach Anwender-programm umbenannt werden. Die Datenstruktur ist fest vordefiniert und darf, bis auf den letzten Eintrag (ReadingResult.arrResult), nicht geändert werden (siehe Kapitel 4.6: Emp-fangen von Leseergebnissen > 200 Byte).Abbildung 4: Struktur des SICK RFU DATA Nutzdaten DBs4.5.1 ModeDer RFU kann immer nur mit einem Transponder gleichzeitig kommunizieren. Aus diesem Grund werden Lese- und Schreibbefehle immer adressiert ausgeführt. Zum Identifizieren des Transponders verwendet der FB die UII (Unique Item Identifier).Um zu bestimmen, mit welcher Transponder UII kommuniziert werden soll, unterstützt der Funktionsbaustein zwei Modi:Mode 1: Es wird immer mit dem Transponder kommuniziert, der sich aktuell im Lesefeld be-findet. Dieser Modus kann nur eingesetzt werden, wenn sich genau ein Tag im Feld befindet. Vorraussetzung für diesen Modus ist eine spezielle Parametrierung des RFUs in SOPAS-ET (siehe Kapitel 4.5.2 und 4.5.3).Mode 2: Es wird eine, vom Anwender definierte Transponder-UII zur Kommunikation ver-wendet.Parameter Deklaration Datentyp BeschreibungMode.bMode Input BOOL AdressierungsmodusFALSE: Mode 1 aktivTRUE: Mode 2 aktivMode.iUIILength Input/Output INT Länge der verwendeten UII0= Unadressiertes Lesen/Schreiben1..60= Länge der im Array …Mode.arrUII“definierten UII.Im Mode 1 wird die UII automatisch be-stimmt.Mode.arrPC Output ARRAY[1..4] OFCHAR PC Word des verwendeten Transpon-ders.(Nur Mode 1)Mode.arrUII Input/Output ARRAY[1..60] OFCHAR Transponder Identifikation (UII)Im Mode 1 wird die UII automatisch be-stimmt.Mode.arrRSSI Output ARRAY[1..4] OFINT RSSI-Wert (Empfangsstärke) des verwen-deten Transponders. (Nur Mode 1)[1]= RSSI-Wert von Antenne 1 (intern)[2]= RSSI-Wert von Antenne 2 (extern)[3]= RSSI-Wert von Antenne 3 (extern)[4]= RSSI-Wert von Antenne 4 (extern)Tabelle 1: Mode Parameter4.5.2 Mode 1: SOPAS-ET ObjekttriggersteuerungIn der Objekttriggersteuerung wird festgelegt, wann das Lesetor geöffnet bzw. geschlossen wird. Nach jedem Lesetor sendet der Sensor ein Leseergebnis zur SPS-Steuerung. Der Funktionsbaustein nutzt diesen Mechanismus, um die UII, das PC-Word und die RSSI-Werte des anzusprechenden Transponders auszulesen.Die SOPAS-ET Einstellungen unter dem Menüpunkt Parameter Reading Configuration Objekt Trigger Control müssen so vorgenommen werden, dass das Triggerfenster über ein SOPAS-Kommando geöffnet wird und bei einem Good Read oder nach einer festgelegten Zeit (hier 1000ms) wieder geschlossen wird.Abbildung 5: Triggereinstellung (SOPAS)4.5.3 Mode 1: SOPAS-ET AusgabeformatDas Ausgabeformat definiert den Inhalt des Telegramms, das vom Gerät gesendet wird, so-bald das Triggerfenster geschlossen wurde. Auf der SPS-Seite wird dieses Telegramm aus-gewertet und die Informationen ausgelesen, die für das adressierte lesen/schreiben von Tag-Daten benötigt werden. Um den Funktionsbaustein im Mode 1 einsetzten zu können, muss das SOPAS Ausgabeformat wie in Abbildung 6 zu sehen aufgebaut sein.Abbildung 6: SOPAS AusgabeformatEs ist darauf zu achten, dass das Format der Blöcke …RSAVG1...4“ auf …Hexadecimal“ einge-stellt ist (Doppelklick auf den jeweiligen Block). Der …PCUII“ Block darf nicht verändert wer-den.Abbildung 7: Einstellungen der RSSI-Blöcke (RSAVG1...4)Je nach Anzahl der Tags, die sich im Empfangsbereich des RFUs befinden und der einge-stellte RSSI-Schwelle, werden die folgenden Telegramme (im ASCII-Format) gesendet:Fall 1: Ein Tag im Feld:[STX]01;[RSSI Antenne 1] [RSSI Antenne 2] [RSSI Antenne 3] [RSSI Antenne 4][PC+UII][ETX]Fall 2: Mehrere Tags im Feld:[STX]0X[ETX]Fall 3: Kein Tag im Feld:[STX]00[ETX]4.5.4 Read TagDie Read Tag Aktion liest einen definierten Datenbereich eines Tags aus. Die Aktion ist im-mer nur auf einen Tag anwendbar. Mit welchem Transponder kommuniziert werden soll, ist vom gewählten Modus abhängig (siehe Kapitel 4.5.1).Vor einem lesenden Zugriff auf einen RFID Tag müssen in der Struktur …ReadTag“ die fol-genden Parameter angegeben werden.Parameter Deklaration Datentyp BeschreibungReadTag.nBank Input BYTE Auswahl der Speicherbank, von dergelesen werden soll.0= Reserviert1= UII/EPC2= TID3= User MemoryReadTag. nStartWord Input WORD Erstes Word (16Bit) das ausgelesenwerden soll.ReadTag. nWordCount Input BYTE Anzahl der Wörter (16Bit) die ausgele-sen werden sollen.Gültiger Wertbereich:[1..32]ReadTag.nRetry Input BYTE Anzahl der Leseversuche die durchge-führt werden sollen.Gültiger Wertebereich:LoNibble (Retries auf einem Kanal)0x[0..7]HiNibble (Retries mit Kanalwechsel)0x[0..5]Beispiel:ReadTag.nRetry=B#16#32 führt 3 Ka-nalwechsel mit jeweils 2 Retries proKanal aus, d.h. insgesamt 6 Versuche.Parameter Deklaration Datentyp BeschreibungReadTag.nAntenna Input BYTE Antennenauswahl für den aktuellenLeseauftrag.A1= Antenne 1 (intern)A2= Antenne 2 (extern)A3= Antenne 3 (extern)A4= Antenne 4 (extern)Wert A4 A3 A2 A11 X2 X3 X X4 X5 X X6 X X7 X X X8 X9 X X10 X X11 X X X12 X X13 X X X14 X X X15 X X X XGültiger Wertebereich:[1..15]ReadTag. iDataLength Output INT Die gültige Länge des gelesenen In-halts in Byte. Notwendig, um zu definie-ren, welche Inhalte von ReadT-ag.arrData gültig sind.ReadTag. arrData Output ARRAY[1..64] OFBYTEInhalt der gelesenen Daten.Tabelle 2: Read Tag Parameter4.5.5 Write TagDie Write Tag Funktion schreibt auf einen definierten Datenbereich eines Tags. Die Aktion ist immer nur auf einen Tag anwendbar. Mit welchem Transponder kommuniziert werden soll, ist vom gewählten Modus abhängig (siehe Kapitel 4.5.1).Vor einem schreibenden Zugriff auf ein RFID Tag müssen in der Struktur …WriteTag“ die fol-genden Parameter angegeben werden.Parameter Deklaration Datentyp BeschreibungWriteTag.nBank Input BYTE Auswahl der Speicherbank, von dergelesen werden soll.0= Reserviert1= UII/EPC2= TID3= User MemoryWriteTag. nStartWord Input WORD Erstes Wort (16Bit) das beschriebenwerden soll.WriteTag. nWordCount Input BYTE Anzahl der Wörter (16Bit) die beschrie-ben werden sollen.Gültiger Wertbereich:[1..32]WriteTag.nRetry Input BYTE Anzahl der Schreibversuche die durch-geführt werden sollen.Gültiger Wertebereich:LoNibble (Retries auf einem Kanal)0x[0..7]HiNibble (Retries mit Kanalwechsel)0x[0..5]Beispiel:WriteTag.nRetry=B#16#32 führt 3 Ka-nalwechsel mit jeweils 2 Retries proKanal aus, d.h. insgesamt 6 VersucheParameter Deklaration Datentyp BeschreibungWriteTag.nAntenna Input BYTE Antennenauswahl für den aktuellenSchreibauftrag.A1= Antenne 1 (intern)A2= Antenne 2 (extern)A3= Antenne 3 (extern)A4= Antenne 4 (extern)Wert A4 A3 A2 A11 X2 X3 X X4 X5 X X6 X X7 X X X8 X9 X X10 X X11 X X X12 X X13 X X X14 X X X15 X X X XGültiger Wertebereich:[1..15]WriteTag. arrData Output ARRAY[1..64] OFBYTEDaten, die auf den gewählten Tag-Bereich geschrieben werden sollen.Tabelle 3: Write Tag Parameter4.5.6 Free CommandMit Hilfe des freien Kommandos hat man die Möglichkeit über ein gültiges CoLa Kommando mit dem RFU zu kommunizieren. Hierfür ist es erforderlich, das Kommando in dem Parame-ter …arrCommand“ der Struktur …FreeCommand“ zu hinterlegen. Die Zeichenlänge des zu übertragenden Kommandos wird in den Parameter …iCommandLength“ geschrieben. Die Kommandos können der Gerätebeschreibung oder SOPAS-ET entnommen werden. Parameter Deklaration Datentyp BeschreibungFreeCommand. iCommandLength Input INT Zeichenlänge des zu übertragendenCoLa Kommandos.Gültiger Wertebereich[1..100]FreeCommand. arrCommand Input ARRAY[1..100]OF CHARFrei wählbares CoLa Kommando(Kommandos siehe Gerätdokumenta-tion).FreeCommand. iResultLength Output INT Bytelänge des empfangenden CoLaTelegramms.ParameterDeklaration Datentyp BeschreibungFreeCommand. arrResultOutput ARRAY[1..100] OF CHAREmpfangende Antwort des gesende-ten CoLa Telegramms.Tabelle 4: Free Command Parameter4.5.7 Reading ResultIn dem Array …ReadingResult.arrResult“ werden Daten abgelegt, die per Triggerbefehl (TRIG_ON, TRIG_OFF) oder direkt vom Gerät gesendet werden (z.B. direkter Trigger über eine Lichtschranke). Der Ausgangsparameter RD_DONE signalisiert, ob Daten empfangen wurden.Parameter Deklaration Datentyp Beschreibung ReadingResult. nCounter Output BYTE Der Empfangszähler wird um einsinkrementiert, sobald ein neues Le-seergebnis empfangen wurde.Wertebereich: [0x00..0xFF]ReadingResult. iLength Output INT Bytelänge des empfangenden Le-seergebnisses. ReadingResult. arrResult Output ARRAY [1..200] of BYTE Empfangende Antwort auf ein Trig-gersignal (Über das SOPAS Ausgabe-format definierbar).Die maximale Länge der empfangen-den Daten beträgt 200 Bytes. Kapitel 4.6 beschreibt dass Vorgehen beim Empfang von längeren Datentele-grammen.Tabelle 5: Reading Result Parameter4.6 Empfangen von Leseergebnissen > 200 ByteDer Funktionsbaustein ist darauf ausgelegt, Leseergebnisse bis zu einer Länge von 200 Bytes zu empfangen. Sollen längere Daten empfangen werden, muss der Funktionsbaustein an den folgenden Stellen abgeändert werden:Änderung im SICK RFU DATA Datenbaustein:Im mitgelieferten Nutzdatenbaustein (DB74) muss die Länge des Array …ReadingResult. arrResult“ so angepasst werden, dass das zu empfangende Leseergebnis in den Datenbe-reich der Variablen passt.Abbildung 8: Empfangen von Leseergebnissen > 200 Bytes (Änderung im Datenbaustein)Änderung im SICK RFU6XX PNDP Funktionsbaustein:Im statischen Bereich der Variablenübersicht muss die Länge der Variable …arrRecord“ so angepasst werden, dass das Leseergebnis in den Datenbereich der Variablen passt. Das Array darf eine Länge von 300 Bytes nicht unterschreiten, muss aber größer/gleich der Rea-dingResult.arrResult Länge sein.Abbildung 9: Empfangen von Leseergebnissen > 200 Bytes (Änderung im FB Deklaration)Im Netzwerk 3 des SICK RFU6XX PNDP FBs müssen die neu definierten Arraylängen ein-getragen werden.Abbildung 10: Empfangen von Leseergebnissen > 200 Bytes (Änderung im Bausteincode) Nach der Änderung muss die Instanz des Funktionsbausteins aktualisiert werden. Anschlie-ßend muss der geänderte Nutzdatenbaustein sowie der Funktionsbaustein zusammen mit der aktualisierten Instanz neu auf die SPS übertragen werden.5 ParameterParameter Deklara-tion Datentyp Speicher-bereichBeschreibungEN INPUT BOOL E,M,D,L,Konst.Enable Eingang (KOP und FUP)IN_ADDR INPUT WORD E,M,D,L,Konst. Projektierte Anfangsadresse aus dem E-Bereich des gewählten Moduls.IN_LEN INPUT INT E,M,D,L,Konst. Länge des verwendeten Input-Moduls in der Hardwarekonfiguration.Gültiger Wertebereich: [8..128]OUT_ADDR INPUT WORD E,M,D,L,Konst. Projektierte Anfangsadresse aus dem A-Bereich des gewählten Moduls.OUT_LEN INPUT INT E,M,D,L,Konst. Länge des verwendeten Output-Moduls in der Hardwarekonfiguration.Gültiger Wertebereich: [8..128]CAN_ID INPUT INT E,M,D,L,Konst. CAN-ID des anzusprechenden Sen-sors.Wenn kein CAN-Netzwerk verwendet wird, ist die CAN-ID = B#16#00Der Master bzw. der Multiplexer wird immer mit der CAN-ID = B#16#00 angesprochen, auch wenn dieser eine andere CAN-ID zugewiesen ist.TOUT INPUT TIME E,M,D,L,Konst. Zeit, nachdem ein Timeout-Fehler aus-gelöst wird.START_REQ INPUT BOOL E,M,D,L Positive Flanke:Ausführen der gewählten Baustein-aktion.TRIG_ON INPUT BOOL E,M,D,L,Konst. Bausteinaktion: Ausführen eines Geräte Triggers (Triggerfenster öffnen)TRIG_OFF INPUT BOOL E,M,D,L,Konst. Bausteinaktion: Ausführen eines Geräte Triggers (Triggerfenster schließen)Das vom Gerät gesendet Ergebnis (SOPAS Ausgabeformat) wird in der Variablen …ReadingResult.arrResult“ des Nutzdaten DBs (DB74) abgelegt.Parameter Deklara-tion Datentyp Speicher-bereichBeschreibungRD_TAG INPUT BOOL E,M,D,L,Konst. Bausteinaktion: Auslesen von Tag In-halten.Die Aktion setzt voraus, dass die Para-meter der Struktur …ReadTag“ desübergebenen Datenbausteins mit gülti-gen Werten belegt sind (siehe Kapitel 4.5.4).Welcher Transponder ausgelesen wer-den soll ist vom gewählten Adressie-rungsmodus abhängig (siehe Kapitel 4.5.1).WR_TAG INPUT BOOL E,M,D,L,Konst. Bausteinaktion: Schreiben von Tag In-halten.Die Aktion setzt voraus, dass die Para-meter der Struktur …WriteTag“ desübergebenen Datenbausteins die Pa-rameter mit gültigen Werten belegt sind (siehe Kapitel 4.5.5).Welcher Transponder beschrieben werden soll ist vom gewählten Adres-sierungsmodus abhängig (siehe Kapitel 4.5.1).COM_TEST INPUT BOOL E,M,D,L,Konst. Bausteinaktion: Ausführen eines Kom-munikationstests.REQ_DONE= TRUE: Kommunikation OKREQ_DONE= FALSE: Kommunikation nicht OKFREE_ COMMAND INPUT BOOL E,M,D,L,Konst.Bausteinaktion: Ausführen eines freienKommandos.Die Aktion setzt voraus, dass im Nutz-datenbaustein (DB74) in der Struktur(FreeCommand) die Parameter iCom-mandLength und arrCommand mit gül-tigen Daten belegt sind (siehe Kapitel4.5.6).Die Kommandoantwort steht nach einererfolgreichen Übertragung(REQ_DONE=TRUE) im RESULT Be-reich des Datenbausteins zur Verfü-gung.Parameter Deklara-tion Datentyp Speicher-bereichBeschreibungRESET INPUT BOOL E,M,D,L,Konst. Bausteinaktion: Rücksetzten der Kom-munikation zum Gerät.DATA INPUT BLOCK_DB Konst. Übergabe des zugehörigen Nutzdaten-bausteins, der für die Parametrierungder Bausteinfunktionen sowie für dasAblegen des Leseergebnisses benötigtwird (DB74).RD_DONE OUTPUT BOOL A,M,D,L Positive Flanke:Neues Leseergebnis empfangen REQ_DONE OUTPUT BOOL A,M,D,L Zeigt an, ob die gewählte Bausteinakti-on fehlerfrei durchgeführt wurde.TRUE: Bearbeitung abgeschlossenFALSE: Bearbeitung nichtabgeschlossenREQ_BUSY OUTPUT BOOL A,M,D,L Auftrag ist in Bearbeitung.ERROR OUTPUT BOOL A,M,D,L Fehler Bit:0: Kein Fehler1: Abbruch mit FehlerERRORCODEOUTPUT WORD A,M,D,L Fehlerstatus (siehe Fehlercodes) ENO OUTPUT BOOL A,M,D,L Enable Ausgang (KOP und FUP)Tabelle 6: Bausteinparameter6 FehlercodesDer Parameter ERRORCODE enthält die folgenden Fehlerinformationen: Fehlercode Kurzbeschreibung BeschreibungW#16#0000 Kein Fehler Kein FehlerW#16#0001 Timeout Fehler Auftrag konnte innerhalb der gewähltenTimeoutzeit nicht ausgeführt werdenDies könnte folgende Ursachen haben:- Gerät ist nicht mit der SPS Verbunden- Kommunikationsparameter fehlerhaft- CAN-Bus Teilnehmer nicht vorhanden W#16#0002 Interner Bausteinfehler Interner BausteinfehlerW#16#0003 Keine oder mehr als eineBausteinaktion angewählt Es kann immer nur eine Bausteinfunktion gleich-zeitig ausgeführt werdenW#16#0004 EmpfangendesLeseergebnis > ReadingResult Array Das empfangene Leseergebnis ist Länger als 200 Bytes. Zum Empfangen von längeren Leseergeb-nissen siehe Kapitel 4.6W#16#0005 100 < FreeCommand.iCommandLength <=0Ungültige Länge des freien KommandosGültiger Wertebereich:[1I100]W#16#0006 Antwort des freien Kom-mandos > 100 Byte Die Antwort auf das gesendete freie Kommando ist länger 100 Byte.W#16#0007 63 < CAN_ID < 0 Ungültige CAN-IDGültiger Wertebereich:[0..63]W#16#0008 Reserviert ReserviertW#16#0009 Kommunikationsfehler Kommunikation zum Gerät kann nicht hergestelltwerden.Dies könnte folgende Ursachen haben:- Ungültige E/A Adressen- Ungültige Länge der E/A Adressen- Es wurde ein Telegramm > arrRecord empfan-genW#16#XX0A Gerätefehler Es ist ein Gerätefehler aufgetreten (’sFA XX’)XX = Gerätefehler (siehe Gerätedokumentation)Fehlercode Kurzbeschreibung BeschreibungW#16#000B Ungültige Kommando-antwortDie gewählte Aktion wurde nicht ausgeführt.Dies kann je nach Aktion die folgenden Ursachenhaben:- Triggereinstellung in der SOPAS Gerätekonfigu-ration fehlerhaft- Gerät befindet sich nicht im …Run-Mode“- Sende/Empfangsleistung zu gering- Tag nicht lang genug im Feld- Zugriff auf einen nicht existierenden Tag-Bereich (nStartWord und nWordCount Parame-ter prüfen)- Gewählte Antenne kann nicht auf den gewähl-ten Tag zugreifen (nAntenna Parameter prüfen).- Ungültige UII (Mode.arrUII und Mode.iUiiLengthprüfen)W#16#000C–W#16#000FReserviert ReserviertW#16#0010 60 < Mode.iUIILength < 0 Ungültige UII LängeGültiger Wertebereich:[0..60]W#16#0011 3 < ReadTag.nBank < 0 Ungültige Bank (Read Tag)Gültiger Wertebereich:[0..3]W#16#0012 32 < ReadTag.nWordCount <= 0 Der Funktionsbaustein kann maximal 32 Wörter (64 Bytes) vom Tag lesen.Gültiger Wertebereich[1..32]W#16#0013 Ungültiger Retry(ReadTag.nRetry)Ungültiger Retry Parameter (Read Tag)Gültiger Wertebereich:Low Nibble = [0..7]High Nibbel = [0..5]W#16#0014 15 < ReadTag.nAntenna< 1Ungültige Antennenanwahl (Read Tag)Gültiger Wertebereich:[1..15]W#16#0015 3 < WriteTag.nBank < 0 Ungültige Bank (Write Tag)Gültiger Wertebereich:[0..3]W#16#0016 32 < WriteTag.nWordCount <= 0 Der Funktionsbaustein kann maximal 32 Wörter (64 Bytes) auf den Tag schreibenGültiger Wertebereich[1..32]。
5071B主频标准说明书

5071BPrimary Frequency StandardFeatures• Easy to use with automatic startup and intuitive menu structure• Fast warm up ±5.0 x 10–13 accuracy in 30 minutes or less for high-per-formance tube• Integrated clock and message displays• Multiple timing and frequency inputs and outputs with easy access at front and rear• Automatic synchronization of 1PPS signal• Remote interface and controlincluding alarm output• Meets requirements in the new ITU-T G.811.1 ePRC standardBenefits• Maintains exceptional accuracy andstability even in unstable environ-ments—unsurpassed stability in thelab or field• Accuracy ±5.0 × 10–13 for highperformance• Stability ≤5.0 × 10–12 for highperformance (for 1 second averag-ing time)• Environmental stability ±8.0 × 10–14for high performance (frequencychange for any combination ofenvironmental conditions)• Long-term stability ≤1.0 × 10–14 forhigh performance (for 5-day averag-ing time)• Proven reliability with an averagemean time between failures (MTBF)of greater than 160,000 hours• Full traceability to NIST• AC and DC input and internal bat-tery back-upThe 5071B primary frequency standardhas the accuracy and stability you needfor both laboratory and field applica-tions. A stability specification for 30-day averaging time means the 5071Bwill keep extremely predictable timeand phase for long periods. Further,the 5071B can be used for long-termaveraging of noisy signals such as GPS.The 5071B is easy to use. No moremanual start-up steps or complicatedadjustments—everything is automatic.A logical menu structure simplifiesfront panel operations, selections,and status reporting. Remote controlfeatures tailor the 5071B for completeoperation and manageability in virtu-ally any location.Meeting the Needs of Leading- EdgeMetrology and Calibration LabsTimekeeping and National StandardsLaboratories verify the stability andaccuracy of their in-house cesiumstandards to Coordinated UniversalTime (UTC), provided by the BureauInternational des Poids et Mesures(BIPM) in Paris. A standard’s accuracyand reliability determine the qualityof service these timekeeping labsprovide. Of even greater concern is thestability of a standard. Stability directlyaffects a laboratory’s ability to delivertimekeeping and calibration services toits clients.The 5071B offers exceptional stabilityand is the first cesium standard tospecify its stability for averaging timeslonger than one day. The instrumenttakes into account environmentalconditions that can heavily influencea cesium standard’s long-term stabil-ity. Digital electronics continuouslymonitor and optimize the instrument’soperating parameters.Thus, the 5071B’s response to environ-mental conditions such as temperatureand humidity are virtually eliminated.The 5071B primary frequency standardmaintains its accuracy and stability,even in unstable environments.Satellite CommunicationsStable frequency generation is required to transmit and receive signals properly between ground terminals and com-munication satellites. Frequency flexibility is also needed to adjust for satellite-to-satellite carrier-frequency differences. The 5071B’s state-of-the-art technology produces offset and primary frequencies with the same guaranteed stability.For secure communications, precise timing synchroniza-tion ensures that encrypted data can be recovered quickly. Frequency-agile signals also require exact synchronization between transmitter and receiver during channel hops.The 5071B automates the synchronization to any external1PPS signal, greatly simplifying this aspect of satellite communications.The 5071B and GPSThe 5071B primary frequency standard can work very well with a GPS timing receiver to produce and maintain highly accurate time and frequency.The GPS system provides accurate time, frequency, and location information worldwide by means of microwave radio broadcasts from a system of satellites. Timing accuracy for the GPS system is based, in large part, on the accuracy and stability of a number of 5071B primary frequency standards. These standards are maintained by the GPS system, the US Naval Observatory, and various timing laboratories around the world that contribute to UTC, the world time scale. Because of their accurate time reference, GPS signals pro-cessed by a good GPS timing receiver can provide highly accurate time and frequency outputs. However, since GPS receivers rely on very low level microwave signals from the satellites, they sometimes lose accuracy because of interfer-ing signals, local antenna problems, or bad satellite data.In spite of these problems, a GPS timing receiver can be an excellent backup and reference to a local 5071B primary frequency standard. The GPS receiver provides an indepen-dent reference that can be used to verify the accuracy of a caesium standard, or it can be used as a temporary backup should the cesium standard need repair. The local 5071B standard has better stability, better output signal quality, and is not perturbed by interfering signals, intermittent signal loss, or bad satellite data.With these characteristics, the synergy created by combin-ing a good quality GPS timing receiver and a 5071B primary frequency standard can produce a highly robust, inexpensive, and redundant frequency and time system. Exceptional AccuracyThe intrinsic accuracy of the improved cesium beam tube (CBT) assures that any high performance 5071B will power up to within ±5.0 x 10–13 of the accepted standard for frequency. This is achieved under full environmental conditions in 30 minutes or less, and without the need for any adjustments or alignments.Unsurpassed StabilityThe 5071B high-performance cesium beam tube guarantees stability to be better than 1.0 x 10–14 for averaging times of five days or greater. The 5071B is the first cesium standard to specify stability for averaging times longer than 1.0 x 105 seconds (approximately one day).The 5071B is also the first cesium standard to specify and guarantee a flicker floor. Flicker floor is the point at which the standard’s stability (σy (2, τ)) does not change with longer averaging. The high performance 5071B flicker floor is guar-anteed to be 1.0 x 10–14 or better. Long-term measurements at the National Institute of Standards and Technology (NIST) show that the flicker floor is typically better than 5.0 x 10–15. Unstable environments are normal for many cesium stan-dard applications. The 5071B features a number of micropro-cessor controlled servo loops which allow it to virtually ignore changes in temperature, humidity, and magnetic fields.The 5071B delivers exceptional performance over very long periods of time, greatly increasing the availability of critical time and frequency services. Actual measurements made at NIST have demonstrated that a 5071B with the high-perfor-mance CBT will drift no more than 5.0 x 10–14 over the entire life of the CBT.Traditional ReliabilityThe 5071B design is based off its predecessor, the 5071A, which has demonstrated an average mean time between failures (MTBF) of greater than 160,000 hours since its introduction in 1992. This data is based on actual field repair data. Backing up this reliability is a 10-year warranty on the standard long-life cesium beam tube and a 5-year warranty for the high performance tube.Complete repair and maintenance services are available at our repair center in Beverly, Massachusetts.Full Traceability to NISTMicrochip provides NIST traceability to the accuracy mea-surements made on every 5071B. Traceability to NIST is maintained through the NIST-supplied Time Measurement and Analysis System (TMAS). This service exceeds the re-quirements of MIL-STD-45662A and can be a valuable tool in demonstrating traceability to your customers.High-Performance Cesium Beam TubeThe 5071A high performance cesium beam tube is optimal for the most demanding operations. The high-performance tube offers a full-environment accuracy specification of±5.0 x 10–13 —two times better than the specification for the standard tube. Stability is also significantly improved. The high-performance tube reaches a flicker floor of 1.0 x 10–14 or better, and long-term measurements at NIST show that the flicker floor is typically better than 5.0 x 10–15. Integrated Systems and Remote OperationToday, cesium standards are often integrated into telecom-munication, satellite communication, or navigation systems as master clocks. To accommodate these environments, the 5071A provides complete remote control and monitoring capabilities. Instrument functions and parameters can be interrogated programmatically.Communication is accomplished using the standard com-mands for programmable instruments (SCPI) language and a dedicated RS-232C port. Also, a rear panel logic output can be programmed to signal when user-defined abnormal condi-tions exist.For uninterruptible system service, an internal battery provides 45 minutes of backup in case of AC power failure. Thus, the 5071A can be managed easily even in the most remote locations.Straightforward OperationInternal microprocessor control makes start-up and opera-tion of the 5071A extremely simple. Once connected to an AC or DC power source, the 5071A automatically powers up to its full accuracy specifications. No adjustments or alignments are necessary during power-up or operation for the life of the cesium tube.An intuitive menu structure is accessible using the front panel LCD display and keypad. These menus—Instrument State, Clock Control, Instrument Configuration, Event Log, Frequen-cy Offset and Utilities—logically report status and facilitate control of the instrument. These functions are described as follows.Instrument StateOverall status is displayed, including any warnings in effect. Key instrument parameters such as C-field current, electron multiplier voltage, ion pump current, and cesium beam tube oven voltage are available. You can initiate a hard copy report of this data on your printer with the push of a button. Clock ControlSet the time and date, schedule leapseconds, adjust the epoch time (in 50 ns steps), and automatically synchronize the 1PPS signal to within 50 ns of an external pulse using this menu.Instrument ConfigurationSet the instrument mode (normal or standby) and assign frequencies (5 MHz or 10 MHz) to the two independently programmable output ports; configure the RS-232C data port. Event LogSignificant internal events (power source changes, hardware failures, warning conditions) are automatically recorded with the time and date of their occurrence. A single keystroke produces a hard copy on your printer for your records. Frequency Offset (Settability)Output frequencies may be offset by as much as 1.0 x 10–9 in steps of approximately 6.3 x 10–15. All product stability and output specifications apply to the offset frequency. UtilitiesThe firmware revision level and cesium beam tube identifica-tion information can be displayed.Accuracy and Long-term Stability11Lifetime accuracy (high performance CBT only) after a minimum two-month warm-up. Change no more than 5.0 × 10–14 for the life of the CBT.Specificationsfront panel or by remote control.The Microchip name and logo and the Microchip logo are registered trademarks of Microchip Technology Incorporated in the U.S.A. and other countries. All other trademarks mentioned herein are property of their respective companies. © 2023, Microchip Technology Incorporated and its subsidiaries. All Rights Reserved. 8/23DS00005002CRemote System Interface and Control RS-232-C (DTE configuration)Complete remote control and interrogation of all instrument。
PG0703P_C02A 等产品的编程手册说明书
目录1. 远程控制概述 (1)1.1 如何远程控制 (1)1.2 通信协议 (3)1.3 远程控制功能 (5)2. SCPI简介 (10)2.1 命令格式 (10)2.2 符号说明 (10)2.3 参数类型 (11)2.4 命令缩写 (12)3. 模式共用命令 (13)3.1 IEEE公用命令子系统 (13)3.2 系统命令 (15)3.3 存储命令 (20)3.4 显示控制 (21)3.5 模式命令 (22)3.6 扫描命令 (22)4. 频谱分析模式 (24)4.1 仪器模式命令 (24)4.2 Initiate命令子系统 (24)4.3 Sense命令子系统 (25)4.4 Calculate命令系统 (43)4.5 Measurement命令系统 (58)4.6 触发 (72)4.7 TG (73)4.8 调制解调 (75)5. 矢量网络分析模式 (77)5.1 频率控制 (77)5.2 幅度控制 (78)5.3 带宽控制 (80)5.4 扫描控制 (80)5.5 TG (81)5.6 迹线 (81)5.7 光标 (85)6. 故障定点分析模式 (98)6.1 频率控制 (98)6.2 幅度控制 (99)6.3 扫描控制 (100)6.4 迹线 (101)6.5 光标 (102)6.6 测量 (105)7. 调制分析模式 (110)7.1 频率控制 (110)7.2 幅度控制 (111)7.3 带宽控制 (112)7.4 扫描控制 (113)7.5 迹线 (114)7.6 光标 (117)7.7 测量 (119)7.8 触发 (124)8. 实时频谱分析模式 (126)8.1 频率控制 (126)8.2 幅度控制 (129)8.3 带宽控制 (131)8.4 扫描控制 (132)8.5 迹线 (134)8.6 光标 (137)8.7 触发 (139)8.8 测量 (142)9. EMI测量 (145)9.1 频率控制 (145)9.2 幅度控制 (147)9.3 带宽控制 (150)9.4 扫描控制 (151)9.5 迹线 (153)9.6 光标 (155)9.7 限制 (159)10. 编程示例 (168)10.1 使用VISA的编程示例 (168)10.2Sockets/Telnet示例 (182)SIGLENT 1. 远程控制概述分析仪支持通过USB、LAN、GPIB-USB接口与计算机进行通信。
Timing Advance Processor EG DYNAMIC用户手册说明书

Timing Advance ProcessorEG DYNAMICuser manualver. 2.7.1 dated 2021-06-22This instruction can be also downloaded from:https://europegas.pl/en/wsparcie-techniczne/Table of content1. Timing Advance Processor “EG Dynamic” description (3)2. Description of signal connections (4)2.1. Power supply source (4)2.2. MAP signal (optional) (5)2.3. TPS signal (5)2.4. Activation signal (5)2.5. Crankshaft position sensor and camshaft position sensor signals (5)2.6. Diagnostic interface plug (6)2.7. Proper installation of TAP EG Dynamic ECU (7)3. Software description (8)3.1. Right panel – actual value of system parameters: (8)3.2. Left panel – Settings bookmark (9)3.3. Middle panel – Maps (11)4. EG Dynamic TAP Calibration step-by-step (12)Hint: Click with Your left mouse button on any of above chapters to go to its page.1. Timing Advance Processor “EG Dynamic” description.EG DYNAMIC Timing advance processor dynamically changes the moment of engine's ignition while it is running on LPG/CNG fuel to improve combustion process efficiency. This way vehicle's engine works more dynamically. Power losses during acceleration are practically eliminated. Advance of ignition is very important when engine runs on CNG because CNG-air mixture combustion time is much longer comparing to combustion time of petrol-air mixture. Usage of Timing Advance Processor also eliminates risk of backfiring and significantly reduces gas consumption. We can say that it is temporarily adapting the original vehicle's ignition system to use LPG/CNG so the difference between driving on both fuel is practically imperceptible.Main advantages of EG DYNAMIC Timing Advance Processor are:∙It is no longer necessary to keep different TAP models depending on type of the crankshaft/camshaft position signal type in particular car.EG DYNAMIC is scanning, learning and supporting all inductive and digital crankshaft and camshaft signals.∙Very easy calibration and configuration process with usage of multipliers user interface.∙Possibility of dynamic and smooth advancing or delaying of ignition angle up to +-30 degrees, depending on the current values of TPS position, RPM and MAP signals.∙Single TAP device supports one inductive sensor and up to two digital sensors simultaneously (STD version) or three digital sensors simultaneously (3D version). It is possible to connect them in any configuration.∙Flexible adjustment of TAP activation moment . Advancing of ignition depends on actual values of RPM and TPS signal and can be activated by “+” or by “-” signal.∙Deactivation of TAP and restoring the original RPM signal in case of emergency can be done easily by pulling out the fuse from fuse holder.2. Description of signal connections2.1. Power supply sourceAttention:Device is destined to be used in cars with +12V power supply installation.Power supply should be connected to such a place from where the device is powered all the time while engine is running. It should be present from the moment of turning ignition key in ACC position until the engine will be switched off. It is unacceptable to connect this line to places where +12V might dissapear: for example, where voltage may drop out while engine is in the cut-off conditions.Hint: In OSCAR-N SAS ECU we should connect it to the red-white wire connected to the +12V ignition from the key.Power supply wire is equipped with 1A circuit fuse, which after removal allows us to disable TAP operation and restore the original RPM signal without necessity of shortening the original camshaft/crankshaft signal wires.2.2. MAP signal (optional)V oltage signal taken from the signal wire of Manifold Absolute Pressure sensor.This connection enables to measure the vacuum signal in the intake manifold so it is possible to make corrections of ignition point angle depending on engine load.Hint: In OSCAR-N SAS ECU we should connect it to the blue wire which goes to mapsensor [pin no. 3 in 4-pole AMP mapsensor plug].2.3. TPS signalSignal of Throttle position sensor or acceleration pedal sensor. Connecting that signal is required for proper calibration and detection of idle and cut-off conditions. TPS signal wire is the one on which voltage (regarding the ground ) changes its value fluently (eg. from 0 to 5V) when we are pressing on the accelerator pedal when vehicle's ignition key is on.2.4. Activation signalSignal which indicates when vehicle is running on gas and when on petrol. It is being used for activation of TAP to start advancing the original RPM signal when all cylinders has been switched to gas fuel.Hint. In case of use of OSCAR-N SAS system the best way of taking the activation signal is connecting to pink wire also used for disconnection of petrol fuel pump when system is on gas.Negative (“-”) signal appears on pink wire when OSCAR-N system is completely switched to gas and disappears in the moment when the system is switched back to petrol.We can also take positive (“+”) activation signal from +12V solenoid valve wire. In such case we should set proper type of gas activation signal (by “+”) in the EG Dynamic software. Gas controller should also be configured in such way to eliminate delays between moment of activating solenoid valves and changeover to gas.2.5. Crankshaft position sensor and camshaft position sensor signalsTo correct configuration we need to properly identify and connect the crankshaft position sensor and the camshaft position sensor(-s) (if present), are located. First, we set the sensor type: •if the connector have two pins, it is an inductive sensor type (resistance value for a typical inductive sensor is approximately 1 kOhm)•if connector has three-pins, it can be inductive sensor type(two pins sensor, the third pin ground. The resistance between the two pins of the sensor is approximately 1 kOhm, and the third pin from the ECU is connected to the ground)•if connector has three-pins, it can be digital sensor type(ground, power supply, signal).One pin from the ECU is connected to ground, the other is power "+12V from the ignition key", the third one is a signal cable).Attention: In controllers equipped with 3 digital channels (3D) it is not possible to configure the inductive sensor (the program automatically detects the type of device).Crankshaft position sensor signal:Main and most important signal to connect is the crankshaft position sensor signal. Camshaft position sensor signal don't have to be connected if it is not necessary to do so. This kind of necessity might happen when the original ECM of the car is report errors related with not synchronizing the camshaft position signal while advancing the signal from crankshaft position sensor. At first we should identify the type of sensor. Inductive sensor -usually it has pins which goes to two lines covered by a screen. Resistance measured between these two lines is around 1000 Ohm. If there are three pins, two of them are connected to signal lines and third one is connected with screen which is the ground signal of vehicle's ECU.Hint if possible we should find the place to cut into signal wires at where additional cover/screen insulation of signal wires is not present. First we should identify two signal wires, cut them and make serial connection by connecting proper pairs of wires from TAP device.There are four wires used to cut into vehicle's inductive signal wires: yellow and white -channel A, green and brown -channel B. We should start with cutting only one signal wire at a time (let's name it 'signal wire A') and connect first pair of inductive signal wires from TAP device:•yellow wire -should be connected with vehicle's inductive signal wire A input going from the inductive sensor•white wire -should be connected with vehicle's inductive signal wire A output going to the petrol ECU Then we proceed with cutting second signal wire (let's name it 'signal wire B') and connect remaining pair of inductive signal wires from TAP device:•green wire -should be connected with vehicle's inductive signal wire B input going from the inductive sensor•brown wire -should be connected with vehicle's inductive signal wire B output going to the petrol ECUAttention: If above connections will be made improperly we may be be not possible to start the vehicle.Camshaft position sensor:Digital sensor. Usually that kind of sensor have three lines signal, ground, power supply: +5V or +12V signal. We should cut only the signal wire and connect it serial to digital channel pair of wires.Hint: The original wire of signal input from digital sensor should be always connected to the color wire with black stripe (blue- black or yellow-black color). The adequate color wire without stripe should always be connected to that part of original vehicle's sensor signal wire which goes to the petrol ECU (blue or yellow color). Otherwise it might cause problem with engine work2.6. Diagnostic interface plugDiagnostic interface wire plug should be connected to EG Dynamic interface. It is possible to establish connection only if the TAP device is powered by +12V (the ignition key is on).2.7. Proper installation of TAP EG Dynamic ECUDuring the installation of TAP EG Dynamic ECU is suggested for the wire set to point downwards. It is also suggested that it should be placed in such a way to avoid the negative impact of high temperature and humidity. It is highly prohibited to spray ECU box with water jets or expose it to long lasting contact with water.3. Software description3.1. Right panel – actual value of system parameters:•Shifting – this value is informing if the impulses are being advanced or delayed (ON) or not (OFF) at the present moment.•Gas– this value is signaling on what fuel the car the car is actually running: on gas (ON) or petrol (OFF).•Angle [`] - angle value (in degrees) by which the current revolutions signal is being shifted.•RPM– rotary engine speed value.•TPS [%]– position of throttle position percentage (accelerator pedal).•MAP [kPa]– actual value of pressure in the intake manifold (engine load).•Inductive [Hz] - the current number of pulses per second for a signal from the inductive sensor.•Digital 1 [Hz] - The current number of pulses per second for a digital sensor signal no.•Digital 2 [Hz] - The current number of pulses per second for a digital sensor signal no.•Power supply [V]- power supply value. This value shouldn't be lower than 9V and not higher than 15V.If any parameter is marked by purple colour, it means that its value is out of allowed working range which determines when signal shifting can be done. Eg. the car is not in gas mode or the TPS signal is below minimum value which has been programmed to start shifting..If any parameter is marked by red colour, it means that its value is beyond the border value. Itprevents proper operation of TAP device. It might also mean that device does not recognize the shape of sensor signal wave. In such case it is necessary to physically check the signal connection and do another signal scanning from the software.3.2. Left panel – Settings bookmark•TPS Calibration - calibration of the minimum and maximum TPS input voltages for fully depressed and pressed accelerator pedal.•Enabling configuration - conditions that must be fulfilled so in the automatic mode the signal pulses shifting can be done.•Advanced◦Pressure sensor - selects the type MAP pressure sensor connected (in OSCAR-N SAS it's ABS400kPa).◦Signaling work on the gas- the choice of polarization of signal which enables shifting the signal pulses: If the TAP activation wire connection has been done topositive signal wire (like +12V solenoid valve wire) we need to choose “plus”. Ifwe've connected it to fuel pump disconnection signal (pink wire from OSCAR-NSAS which gives “ground” signal) we need to choose “minus”.◦TPS acceleration correction - the choice of TPS signal changes sensitivity. It's helpful in cases at which original ignition signal angle temporary increasessignificantly when accelerating. This allows to temporary increase the angle of signalshifting by extra velue for the rapid accelerations to compensate this signal change. Itworks only if RPM value is less than 1500 RPM.Attention: It is not reccomended to increase value of that parameter if it is notnecessary.◦Allowed retard – extends shift range for negative value. Default setting is OFF. Only for conversion from CNG to LPG use this option to retard ignition.•Inductive sensor, digital sensor 1, digital sensor 2◦Connections - selection of type of shaft where signal has been connected.◦Impulses per 1 revolution: number of pulses per revolution detected during a scan run (control value)◦Scan – starts automatic scanning the sensor signal wave. Should be carried out under stable conditions when the engine is running on idle. It is necessary to provide the actualvalue of engine rotary speed before starting scanning.In case that we've already scanned the wave of crankshaft sensor signal, and we need toget the shape of camshaft position signal wave we can select that option to allow thesignal to be read from that channel.Attention:It is very important to always start scanning from the crankshaft sensorsignal, and proceed to scanning of the camshaft sensors signals (if they have beenconnected)◦Preview - feature which enable us to check the shape of scanned sensor signal wave.3.3. Middle panel – MapsMap of the angle shifting regarding enginerotary speed.Point of the violet line indicates the currentsignal pulses shifting offset (in degrees).It is recommended to set a lower angle valueat higher rotary speeds.Multiplier Correction (eg. 1.0 is 100%, 0.6 is60% of original shifting offset) of the angleregarding the engine manifold absolutepressure(load).For heavy loads is recommended to set theadjustment below 1.0 to do not increase theengine knock value.Multiplier Correction (eg. 1.0 is 100%, 0.6 is60% of original shifting offset) of the angleregarding the TPS signal value.For idle conditions signal pulses shiftingshould be disabed , because it can lead toengines RPM waving in some type ofvehicles.We can do it by lowering themultiplier line on the map or in the Settingspanel.Allowed shortcuts and controls for map modification:•Left mouse button - move the points in the X and Y axis.•Right mouse button - move only points in Y axis.•Double click by left mouse button -add or remove point.•Arrow left, arrow right - selection of point.•Shift + arrow left, Shift + arrow righ t - selection of a group of points.•Ctrl + A – selection of all the points.•Arrow up, Arrow down - moving points in the Y-axis.•Home, End - moving points in the Y-axis with a higher speed•Ctrl + arrow up, Ctrl + down, Ctrl + left, Ctrl + right -moves points in the X and Y•Insert - adds another point•Delete - removes the selected point•Page Up, Page Down - moves the whole multiplier line in the Y-axis4. EG Dynamic TAP Calibration step-by-step.1.Establishing a connection– Turn on the ignition key to give +12V to the TAP device.Please select the right the serial port number from "Port" menu to establish a connection with diagnostic interface device.2.Calibrate TPS - while the engine is off, please make sure that ignition from the key is stillon and TAP device is being powered by +12V. In"TPS calibration", press"Set"button when the accelerator is fully depressed to remember that value as “Bottom TPS Threshold”.Then fully press the pedal all the way down and press "Set" button to store the maximum TPS voltage value as“Top TPS Threshold”.Check if changing the position of the acceleration pedal causes changing the current value of the TPS smoothly from 0 to 100%3.Selection of pressure sensor. -after selecting the appropriate sensor type when engine is off,and +12V from igniton on, the value of this parameter to indicate the MAP should be about 100 kPa. The default pressure sensor for OSCAR-N SAS is ABS400kPa.4.Selection of the activation of signal which indicates that vehicle is workng on gas-depending on where you connect the activation signal of TAP activation wire. If it has been connected to positive signal wire (eg. +12V solenoid valve wire) we need to choose “plus”.If we've connected it to fuel pump disconnection signal (eg. pink wire from OSCAR-N SAS which gives “ground” signal) we need to choose “minus”.5.Crankshaft sensor configuration - depending on the type of sensor and connection made toit (inductive or digital) we need to select proper type of that sensor in“Settings”panel.Then we should run a scan when the car is having working temperature and it is running on idle conditions..6.Camshaft sensors configuration–camshaft sensors should be connected only whennecessary (eg. when while shifting only the pulses from the crankshaft sensor, there is a check-engine associated with the camshaft sensor). The process of configuration is the same as in the case the crankshaft sensor configuration.7.Configuration of conditions of shifting the sensors pulses-In "Enabling configuration"panel we have to select the desired scopes of the TPS position, rotary speed, and select the “Shifting mode” to “automatic”. Mode “Always”which is permanently forcing TAP to shitf the signal pulses should be used onlyfor diagnostic purposes.8.Setting the map – We can leave default maps of sensor signal shifting or we can modify itaccording our requirements depending on the rotary speed, and the correction of the position of the TPS and MAP (load).。
OSHA现场作业手册说明书
DIRECTIVE NUMBER: CPL 02-00-150 EFFECTIVE DATE: April 22, 2011 SUBJECT: Field Operations Manual (FOM)ABSTRACTPurpose: This instruction cancels and replaces OSHA Instruction CPL 02-00-148,Field Operations Manual (FOM), issued November 9, 2009, whichreplaced the September 26, 1994 Instruction that implemented the FieldInspection Reference Manual (FIRM). The FOM is a revision of OSHA’senforcement policies and procedures manual that provides the field officesa reference document for identifying the responsibilities associated withthe majority of their inspection duties. This Instruction also cancels OSHAInstruction FAP 01-00-003 Federal Agency Safety and Health Programs,May 17, 1996 and Chapter 13 of OSHA Instruction CPL 02-00-045,Revised Field Operations Manual, June 15, 1989.Scope: OSHA-wide.References: Title 29 Code of Federal Regulations §1903.6, Advance Notice ofInspections; 29 Code of Federal Regulations §1903.14, Policy RegardingEmployee Rescue Activities; 29 Code of Federal Regulations §1903.19,Abatement Verification; 29 Code of Federal Regulations §1904.39,Reporting Fatalities and Multiple Hospitalizations to OSHA; and Housingfor Agricultural Workers: Final Rule, Federal Register, March 4, 1980 (45FR 14180).Cancellations: OSHA Instruction CPL 02-00-148, Field Operations Manual, November9, 2009.OSHA Instruction FAP 01-00-003, Federal Agency Safety and HealthPrograms, May 17, 1996.Chapter 13 of OSHA Instruction CPL 02-00-045, Revised FieldOperations Manual, June 15, 1989.State Impact: Notice of Intent and Adoption required. See paragraph VI.Action Offices: National, Regional, and Area OfficesOriginating Office: Directorate of Enforcement Programs Contact: Directorate of Enforcement ProgramsOffice of General Industry Enforcement200 Constitution Avenue, NW, N3 119Washington, DC 20210202-693-1850By and Under the Authority ofDavid Michaels, PhD, MPHAssistant SecretaryExecutive SummaryThis instruction cancels and replaces OSHA Instruction CPL 02-00-148, Field Operations Manual (FOM), issued November 9, 2009. The one remaining part of the prior Field Operations Manual, the chapter on Disclosure, will be added at a later date. This Instruction also cancels OSHA Instruction FAP 01-00-003 Federal Agency Safety and Health Programs, May 17, 1996 and Chapter 13 of OSHA Instruction CPL 02-00-045, Revised Field Operations Manual, June 15, 1989. This Instruction constitutes OSHA’s general enforcement policies and procedures manual for use by the field offices in conducting inspections, issuing citations and proposing penalties.Significant Changes∙A new Table of Contents for the entire FOM is added.∙ A new References section for the entire FOM is added∙ A new Cancellations section for the entire FOM is added.∙Adds a Maritime Industry Sector to Section III of Chapter 10, Industry Sectors.∙Revises sections referring to the Enhanced Enforcement Program (EEP) replacing the information with the Severe Violator Enforcement Program (SVEP).∙Adds Chapter 13, Federal Agency Field Activities.∙Cancels OSHA Instruction FAP 01-00-003, Federal Agency Safety and Health Programs, May 17, 1996.DisclaimerThis manual is intended to provide instruction regarding some of the internal operations of the Occupational Safety and Health Administration (OSHA), and is solely for the benefit of the Government. No duties, rights, or benefits, substantive or procedural, are created or implied by this manual. The contents of this manual are not enforceable by any person or entity against the Department of Labor or the United States. Statements which reflect current Occupational Safety and Health Review Commission or court precedents do not necessarily indicate acquiescence with those precedents.Table of ContentsCHAPTER 1INTRODUCTIONI.PURPOSE. ........................................................................................................... 1-1 II.SCOPE. ................................................................................................................ 1-1 III.REFERENCES .................................................................................................... 1-1 IV.CANCELLATIONS............................................................................................. 1-8 V. ACTION INFORMATION ................................................................................. 1-8A.R ESPONSIBLE O FFICE.......................................................................................................................................... 1-8B.A CTION O FFICES. .................................................................................................................... 1-8C. I NFORMATION O FFICES............................................................................................................ 1-8 VI. STATE IMPACT. ................................................................................................ 1-8 VII.SIGNIFICANT CHANGES. ............................................................................... 1-9 VIII.BACKGROUND. ................................................................................................. 1-9 IX. DEFINITIONS AND TERMINOLOGY. ........................................................ 1-10A.T HE A CT................................................................................................................................................................. 1-10B. C OMPLIANCE S AFETY AND H EALTH O FFICER (CSHO). ...........................................................1-10B.H E/S HE AND H IS/H ERS ..................................................................................................................................... 1-10C.P ROFESSIONAL J UDGMENT............................................................................................................................... 1-10E. W ORKPLACE AND W ORKSITE ......................................................................................................................... 1-10CHAPTER 2PROGRAM PLANNINGI.INTRODUCTION ............................................................................................... 2-1 II.AREA OFFICE RESPONSIBILITIES. .............................................................. 2-1A.P ROVIDING A SSISTANCE TO S MALL E MPLOYERS. ...................................................................................... 2-1B.A REA O FFICE O UTREACH P ROGRAM. ............................................................................................................. 2-1C. R ESPONDING TO R EQUESTS FOR A SSISTANCE. ............................................................................................ 2-2 III. OSHA COOPERATIVE PROGRAMS OVERVIEW. ...................................... 2-2A.V OLUNTARY P ROTECTION P ROGRAM (VPP). ........................................................................... 2-2B.O NSITE C ONSULTATION P ROGRAM. ................................................................................................................ 2-2C.S TRATEGIC P ARTNERSHIPS................................................................................................................................. 2-3D.A LLIANCE P ROGRAM ........................................................................................................................................... 2-3 IV. ENFORCEMENT PROGRAM SCHEDULING. ................................................ 2-4A.G ENERAL ................................................................................................................................................................. 2-4B.I NSPECTION P RIORITY C RITERIA. ..................................................................................................................... 2-4C.E FFECT OF C ONTEST ............................................................................................................................................ 2-5D.E NFORCEMENT E XEMPTIONS AND L IMITATIONS. ....................................................................................... 2-6E.P REEMPTION BY A NOTHER F EDERAL A GENCY ........................................................................................... 2-6F.U NITED S TATES P OSTAL S ERVICE. .................................................................................................................. 2-7G.H OME-B ASED W ORKSITES. ................................................................................................................................ 2-8H.I NSPECTION/I NVESTIGATION T YPES. ............................................................................................................... 2-8 V.UNPROGRAMMED ACTIVITY – HAZARD EVALUATION AND INSPECTION SCHEDULING ............................................................................ 2-9 VI.PROGRAMMED INSPECTIONS. ................................................................... 2-10A.S ITE-S PECIFIC T ARGETING (SST) P ROGRAM. ............................................................................................. 2-10B.S CHEDULING FOR C ONSTRUCTION I NSPECTIONS. ..................................................................................... 2-10C.S CHEDULING FOR M ARITIME I NSPECTIONS. ............................................................................. 2-11D.S PECIAL E MPHASIS P ROGRAMS (SEP S). ................................................................................... 2-12E.N ATIONAL E MPHASIS P ROGRAMS (NEP S) ............................................................................... 2-13F.L OCAL E MPHASIS P ROGRAMS (LEP S) AND R EGIONAL E MPHASIS P ROGRAMS (REP S) ............ 2-13G.O THER S PECIAL P ROGRAMS. ............................................................................................................................ 2-13H.I NSPECTION S CHEDULING AND I NTERFACE WITH C OOPERATIVE P ROGRAM P ARTICIPANTS ....... 2-13CHAPTER 3INSPECTION PROCEDURESI.INSPECTION PREPARATION. .......................................................................... 3-1 II.INSPECTION PLANNING. .................................................................................. 3-1A.R EVIEW OF I NSPECTION H ISTORY .................................................................................................................... 3-1B.R EVIEW OF C OOPERATIVE P ROGRAM P ARTICIPATION .............................................................................. 3-1C.OSHA D ATA I NITIATIVE (ODI) D ATA R EVIEW .......................................................................................... 3-2D.S AFETY AND H EALTH I SSUES R ELATING TO CSHO S.................................................................. 3-2E.A DVANCE N OTICE. ................................................................................................................................................ 3-3F.P RE-I NSPECTION C OMPULSORY P ROCESS ...................................................................................................... 3-5G.P ERSONAL S ECURITY C LEARANCE. ................................................................................................................. 3-5H.E XPERT A SSISTANCE. ........................................................................................................................................... 3-5 III. INSPECTION SCOPE. ......................................................................................... 3-6A.C OMPREHENSIVE ................................................................................................................................................... 3-6B.P ARTIAL. ................................................................................................................................................................... 3-6 IV. CONDUCT OF INSPECTION .............................................................................. 3-6A.T IME OF I NSPECTION............................................................................................................................................. 3-6B.P RESENTING C REDENTIALS. ............................................................................................................................... 3-6C.R EFUSAL TO P ERMIT I NSPECTION AND I NTERFERENCE ............................................................................. 3-7D.E MPLOYEE P ARTICIPATION. ............................................................................................................................... 3-9E.R ELEASE FOR E NTRY ............................................................................................................................................ 3-9F.B ANKRUPT OR O UT OF B USINESS. .................................................................................................................... 3-9G.E MPLOYEE R ESPONSIBILITIES. ................................................................................................. 3-10H.S TRIKE OR L ABOR D ISPUTE ............................................................................................................................. 3-10I. V ARIANCES. .......................................................................................................................................................... 3-11 V. OPENING CONFERENCE. ................................................................................ 3-11A.G ENERAL ................................................................................................................................................................ 3-11B.R EVIEW OF A PPROPRIATION A CT E XEMPTIONS AND L IMITATION. ..................................................... 3-13C.R EVIEW S CREENING FOR P ROCESS S AFETY M ANAGEMENT (PSM) C OVERAGE............................. 3-13D.R EVIEW OF V OLUNTARY C OMPLIANCE P ROGRAMS. ................................................................................ 3-14E.D ISRUPTIVE C ONDUCT. ...................................................................................................................................... 3-15F.C LASSIFIED A REAS ............................................................................................................................................. 3-16VI. REVIEW OF RECORDS. ................................................................................... 3-16A.I NJURY AND I LLNESS R ECORDS...................................................................................................................... 3-16B.R ECORDING C RITERIA. ...................................................................................................................................... 3-18C. R ECORDKEEPING D EFICIENCIES. .................................................................................................................. 3-18 VII. WALKAROUND INSPECTION. ....................................................................... 3-19A.W ALKAROUND R EPRESENTATIVES ............................................................................................................... 3-19B.E VALUATION OF S AFETY AND H EALTH M ANAGEMENT S YSTEM. ....................................................... 3-20C.R ECORD A LL F ACTS P ERTINENT TO A V IOLATION. ................................................................................. 3-20D.T ESTIFYING IN H EARINGS ................................................................................................................................ 3-21E.T RADE S ECRETS. ................................................................................................................................................. 3-21F.C OLLECTING S AMPLES. ..................................................................................................................................... 3-22G.P HOTOGRAPHS AND V IDEOTAPES.................................................................................................................. 3-22H.V IOLATIONS OF O THER L AWS. ....................................................................................................................... 3-23I.I NTERVIEWS OF N ON-M ANAGERIAL E MPLOYEES .................................................................................... 3-23J.M ULTI-E MPLOYER W ORKSITES ..................................................................................................................... 3-27 K.A DMINISTRATIVE S UBPOENA.......................................................................................................................... 3-27 L.E MPLOYER A BATEMENT A SSISTANCE. ........................................................................................................ 3-27 VIII. CLOSING CONFERENCE. .............................................................................. 3-28A.P ARTICIPANTS. ..................................................................................................................................................... 3-28B.D ISCUSSION I TEMS. ............................................................................................................................................ 3-28C.A DVICE TO A TTENDEES .................................................................................................................................... 3-29D.P ENALTIES............................................................................................................................................................. 3-30E.F EASIBLE A DMINISTRATIVE, W ORK P RACTICE AND E NGINEERING C ONTROLS. ............................ 3-30F.R EDUCING E MPLOYEE E XPOSURE. ................................................................................................................ 3-32G.A BATEMENT V ERIFICATION. ........................................................................................................................... 3-32H.E MPLOYEE D ISCRIMINATION .......................................................................................................................... 3-33 IX. SPECIAL INSPECTION PROCEDURES. ...................................................... 3-33A.F OLLOW-UP AND M ONITORING I NSPECTIONS............................................................................................ 3-33B.C ONSTRUCTION I NSPECTIONS ......................................................................................................................... 3-34C. F EDERAL A GENCY I NSPECTIONS. ................................................................................................................. 3-35CHAPTER 4VIOLATIONSI. BASIS OF VIOLATIONS ..................................................................................... 4-1A.S TANDARDS AND R EGULATIONS. .................................................................................................................... 4-1B.E MPLOYEE E XPOSURE. ........................................................................................................................................ 4-3C.R EGULATORY R EQUIREMENTS. ........................................................................................................................ 4-6D.H AZARD C OMMUNICATION. .............................................................................................................................. 4-6E. E MPLOYER/E MPLOYEE R ESPONSIBILITIES ................................................................................................... 4-6 II. SERIOUS VIOLATIONS. .................................................................................... 4-8A.S ECTION 17(K). ......................................................................................................................... 4-8B.E STABLISHING S ERIOUS V IOLATIONS ............................................................................................................ 4-8C. F OUR S TEPS TO BE D OCUMENTED. ................................................................................................................... 4-8 III. GENERAL DUTY REQUIREMENTS ............................................................. 4-14A.E VALUATION OF G ENERAL D UTY R EQUIREMENTS ................................................................................. 4-14B.E LEMENTS OF A G ENERAL D UTY R EQUIREMENT V IOLATION.............................................................. 4-14C. U SE OF THE G ENERAL D UTY C LAUSE ........................................................................................................ 4-23D.L IMITATIONS OF U SE OF THE G ENERAL D UTY C LAUSE. ..............................................................E.C LASSIFICATION OF V IOLATIONS C ITED U NDER THE G ENERAL D UTY C LAUSE. ..................F. P ROCEDURES FOR I MPLEMENTATION OF S ECTION 5(A)(1) E NFORCEMENT ............................ 4-25 4-27 4-27IV.OTHER-THAN-SERIOUS VIOLATIONS ............................................... 4-28 V.WILLFUL VIOLATIONS. ......................................................................... 4-28A.I NTENTIONAL D ISREGARD V IOLATIONS. ..........................................................................................4-28B.P LAIN I NDIFFERENCE V IOLATIONS. ...................................................................................................4-29 VI. CRIMINAL/WILLFUL VIOLATIONS. ................................................... 4-30A.A REA D IRECTOR C OORDINATION ....................................................................................................... 4-31B.C RITERIA FOR I NVESTIGATING P OSSIBLE C RIMINAL/W ILLFUL V IOLATIONS ........................ 4-31C. W ILLFUL V IOLATIONS R ELATED TO A F ATALITY .......................................................................... 4-32 VII. REPEATED VIOLATIONS. ...................................................................... 4-32A.F EDERAL AND S TATE P LAN V IOLATIONS. ........................................................................................4-32B.I DENTICAL S TANDARDS. .......................................................................................................................4-32C.D IFFERENT S TANDARDS. .......................................................................................................................4-33D.O BTAINING I NSPECTION H ISTORY. .....................................................................................................4-33E.T IME L IMITATIONS..................................................................................................................................4-34F.R EPEATED V. F AILURE TO A BATE....................................................................................................... 4-34G. A REA D IRECTOR R ESPONSIBILITIES. .............................................................................. 4-35 VIII. DE MINIMIS CONDITIONS. ................................................................... 4-36A.C RITERIA ................................................................................................................................................... 4-36B.P ROFESSIONAL J UDGMENT. ..................................................................................................................4-37C. A REA D IRECTOR R ESPONSIBILITIES. .............................................................................. 4-37 IX. CITING IN THE ALTERNATIVE ............................................................ 4-37 X. COMBINING AND GROUPING VIOLATIONS. ................................... 4-37A.C OMBINING. ..............................................................................................................................................4-37B.G ROUPING. ................................................................................................................................................4-38C. W HEN N OT TO G ROUP OR C OMBINE. ................................................................................................4-38 XI. HEALTH STANDARD VIOLATIONS ....................................................... 4-39A.C ITATION OF V ENTILATION S TANDARDS ......................................................................................... 4-39B.V IOLATIONS OF THE N OISE S TANDARD. ...........................................................................................4-40 XII. VIOLATIONS OF THE RESPIRATORY PROTECTION STANDARD(§1910.134). ....................................................................................................... XIII. VIOLATIONS OF AIR CONTAMINANT STANDARDS (§1910.1000) ... 4-43 4-43A.R EQUIREMENTS UNDER THE STANDARD: .................................................................................................. 4-43B.C LASSIFICATION OF V IOLATIONS OF A IR C ONTAMINANT S TANDARDS. ......................................... 4-43 XIV. CITING IMPROPER PERSONAL HYGIENE PRACTICES. ................... 4-45A.I NGESTION H AZARDS. .................................................................................................................................... 4-45B.A BSORPTION H AZARDS. ................................................................................................................................ 4-46C.W IPE S AMPLING. ............................................................................................................................................. 4-46D.C ITATION P OLICY ............................................................................................................................................ 4-46 XV. BIOLOGICAL MONITORING. ...................................................................... 4-47CHAPTER 5CASE FILE PREPARATION AND DOCUMENTATIONI.INTRODUCTION ............................................................................................... 5-1 II.INSPECTION CONDUCTED, CITATIONS BEING ISSUED. .................... 5-1A.OSHA-1 ................................................................................................................................... 5-1B.OSHA-1A. ............................................................................................................................... 5-1C. OSHA-1B. ................................................................................................................................ 5-2 III.INSPECTION CONDUCTED BUT NO CITATIONS ISSUED .................... 5-5 IV.NO INSPECTION ............................................................................................... 5-5 V. HEALTH INSPECTIONS. ................................................................................. 5-6A.D OCUMENT P OTENTIAL E XPOSURE. ............................................................................................................... 5-6B.E MPLOYER’S O CCUPATIONAL S AFETY AND H EALTH S YSTEM. ............................................................. 5-6 VI. AFFIRMATIVE DEFENSES............................................................................. 5-8A.B URDEN OF P ROOF. .............................................................................................................................................. 5-8B.E XPLANATIONS. ..................................................................................................................................................... 5-8 VII. INTERVIEW STATEMENTS. ........................................................................ 5-10A.G ENERALLY. ......................................................................................................................................................... 5-10B.CSHO S SHALL OBTAIN WRITTEN STATEMENTS WHEN: .......................................................................... 5-10C.L ANGUAGE AND W ORDING OF S TATEMENT. ............................................................................................. 5-11D.R EFUSAL TO S IGN S TATEMENT ...................................................................................................................... 5-11E.V IDEO AND A UDIOTAPED S TATEMENTS. ..................................................................................................... 5-11F.A DMINISTRATIVE D EPOSITIONS. .............................................................................................5-11 VIII. PAPERWORK AND WRITTEN PROGRAM REQUIREMENTS. .......... 5-12 IX.GUIDELINES FOR CASE FILE DOCUMENTATION FOR USE WITH VIDEOTAPES AND AUDIOTAPES .............................................................. 5-12 X.CASE FILE ACTIVITY DIARY SHEET. ..................................................... 5-12 XI. CITATIONS. ..................................................................................................... 5-12A.S TATUTE OF L IMITATIONS. .............................................................................................................................. 5-13B.I SSUING C ITATIONS. ........................................................................................................................................... 5-13C.A MENDING/W ITHDRAWING C ITATIONS AND N OTIFICATION OF P ENALTIES. .................................. 5-13D.P ROCEDURES FOR A MENDING OR W ITHDRAWING C ITATIONS ............................................................ 5-14 XII. INSPECTION RECORDS. ............................................................................... 5-15A.G ENERALLY. ......................................................................................................................................................... 5-15B.R ELEASE OF I NSPECTION I NFORMATION ..................................................................................................... 5-15C. C LASSIFIED AND T RADE S ECRET I NFORMATION ...................................................................................... 5-16。
NI PXI定时与同步模块说明书
CONTENTSPXI Timing and Synchronization Modules Detailed View of PXIe-6674TKey FeaturesNI-Sync Application Programming Interface (API) Platform-Based Approach to Test and Measurement PXI InstrumentationHardware ServicesPXI Timing and Synchronization Modules PXIe-6674T, PXIe-6672, PXI-6683 and PXI-6683H•Generate high-stability PXI system reference clocks and high-resolution sample clocks •Minimize skew through access to PXI-star and PXIe-Dstar chassis trigger lines •Import and export system reference clocks for synchronization between multiple chassis orexternal devices •Achieve synchronization over large distance through GPS, IEEE 1588,IRIG-B or PPS•Develop advanced timing and sync applications with NI-Sync and NI-TClk softwarePowerful, Reliable Timing and SynchronizationNI’s PXI timing and synchronization modules enable a higher level of synchronization on the PXI platform through high-stability clocks, high-precision triggering and advanced signal routing. Implementing timing and synchronization hardware can vastly improve the accuracy of measurements, provide advanced triggering schemes, and allow synchronization of multiple devices for extremely high-channel-count applications. NI’s portfolio includes both signal-based and time-based solutions to deliver the advantages of synchronization to numerous applications.Table 1. NI offers various PXI modules to meet a range of timing and synchronization requirements.*Accuracy within one year of calibration adjustment within 0 ºC and 55 ºC operating temperature rangeDetailed View of PXIe-6674TSlot Compatibility PXI Timing or Peripheral Slot PXI or PXIe Hybrid Peripheral Slot PXIe System TimingSlot PXIe System TimingSlot Oscillator Accuracy*TCXO / 3.5 ppm TCXO / 3.5 ppm TCXO / 3.5 ppm OCXO / 80 ppb DDS Clock Generation Range Not available Not available DC to 105 MHz 0.3 Hz to 1 GHzDDS Clock Generation Resolution Not availableNot available0.075 Hz2.84 µHzPXI 10MHz Backplane Clock Override ● ● ● Clock Import Capability ● ● ● Clock Export Capability● ● ● ● Time-Based Synchronization (GPS, IEEE 1588, IRIG-B, PPS)● ● PXI Trigger Access (PXI_TRIG) ● ● ● ● PXI-Star Trigger Access (PXI_STAR) ●● ● PXIe-Dstar Trigger Access (PXI_DSTARA/B/C)● Front Panel Physical Connectors SMB, RJ45SMB, RJ45SMB SMA PFI Lines on Front Panel3366Key FeaturesHigh-Stability, High-Accuracy Onboard ClockApplications requiring highly reliable and consistent clock signals require a highly stable oscillator to avoid clock inaccuracies. For an NI PXI Express chassis, the oscillator is accurate to 25 parts per million (ppm). Inserting an NI PXI timing and synchronization module into the system timing slot of the chassis enables the user to replace this backplane system reference clock using the higher accuracy oscillator of the module. The PXIe-6672 and PXI-6683 modules contain a temperature-compensated crystal oscillator (TCXO) which can achieve accuracies better than 4 ppm. The PXIe-6674T features an oven-controlled crystal oscillator (OCXO) with an accuracy of 80 parts-per-billion (ppb). Note that the PXI-6683H contains the same oscillator as the PXI-6683, but due to its hybrid connectivity is not able to override the backplane clock.Figure 1.By referencing the OCXO on the PXIe-6674T, the 10 MHz backplane clock of a PXI chassis achieves muchlower phase noise and thus more clock stability.PXI modular instruments with phased-lock loop circuits, such as high-speed digitizers and waveform generators, can take advantage of the high-precision clock of timing and synchronization modules. When locking to a high-accuracy reference clock, the instrument inherits the accuracy of the clock, achieving sample clock resolutions as low as 0.5 Hz with an OCXO-based module.Skew Reduction with Star and Differential Star LinesDue to the variation in signal path lengths between slots in a PXI chassis, skew may be introduced when sending clocks or triggers to multiple slot destinations over the PXI trigger bus. To address this, all NI PXI chassis also include trace-length-matched star trigger lines accessible from a timing and synchronization module in the system timing slot. Star trigger lines can reduce skew to a maximum of 1 ns. Additionally, PXI Express chassis include differential star trigger lines capable of minimizing slot-to-slot skew to under 150 ps.Figure 2.While every slot of the PXI backplane may access the PXI trigger bus, the star trigger lines and differential star trigger lines are only accessible through the system timing slot.Time-Based Synchronization with GPS, IEEE 1588, IRIG-B or PPSThe NI PXI-6683 and PXI-6683H timing and synchronization modules synchronize PXI and PXI Express systems through time-based technology or protocols. Time-based modules can generate triggers and clock signals at programmable future times and timestamp input events with the synchronized system time including that of real-time systems. For PXI Express systems requiring time-based synchronization with backplane clock discipline or star trigger access, the PXI-6683H can be combined with the PXIe- 6674T or PXIe-6672 to provide a full-featured synchronization solution.Advanced Routing of Clocks and TriggersUsing a PXI timing and synchronization module provides the capability of advanced routing of clock and trigger signals. Through the combination of system timing slot access and FPGA-based routing, many more source-to-destination routes become possible, allowing more flexible designs and efficient use of system resources.Table 2. The PXIe-6674T timing and synchronization module features a wide vaiety of source-to-destination routes bycombining the power of the PXI Express architecture with the signal-routing capabilities of the onboard FPGA.● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●●●●●●●NI-Sync Application Programming Interface (API)The NI-Sync driver allows configuration of system timing and synchronization through LabVIEW, C, or .NET. This includes signal-based synchronization, such as sharing triggers and clocks to be used directly, or time-based synchronization, using time protocols such as IEEE-1588, IRIG, or GPS for non-tethered systems. NI-Sync is designed for use with other NI drivers, such as NI-DAQmx, for advanced timing, high channel count, distributed or multiple-instrument applications.DestinationS o u r c ePlatform-Based Approach to Test and MeasurementWhat Is PXI?Powered by software, PXI is a rugged PC-based platform for measurement and automation systems. PXI combines PCI electrical-bus features with the modular, Eurocard packaging of CompactPCI and then adds specialized synchronization buses and key software features. PXI is both a high-performance and low-cost deployment platform for applications such as manufacturing test, military and aerospace, machine monitoring, automotive, and industrial test. Developed in 1997 and launched in 1998, PXI is an open industry standard governed by the PXI Systems Alliance (PXISA), a group of more than 70 companies chartered to promote the PXI standard, ensure interoperability, and maintain the PXI specification.Integrating the Latest Commercial TechnologyBy leveraging the latest commercial technology for our products, we can continually deliver high-performance and high-quality products to our users at a competitive price. The latest PCI Express Gen 3 switches deliver higher data throughput, the latest Intel multicore processors facilitate faster and more efficient parallel (multisite) testing, the latest FPGAs from Xilinx help to push signal processing algorithms to the edge to accelerate measurements, and the latest data converters from TI and ADI continuallyincrease the measurement range and performance of our instrumentation.PXI InstrumentationNI offers more than 600 different PXI modules ranging from DC to mmWave. Because PXI is an open industry standard, nearly 1,500 products are available from more than 70 different instrument vendors. With standard processing and control functions designated to a controller, PXI instruments need to contain only the actual instrumentation circuitry, which provides effective performance in a small footprint. Combined with a chassis and controller, PXI systems feature high-throughput data movement using PCI Express bus interfaces and sub-nanosecond synchronization with integrated timing and triggering.OscilloscopesSample at speeds up to 12.5 GS/s with 5 GHz of analog bandwidth, featuring numerous triggering modes and deep onboard memoryDigital InstrumentsPerform characterization and production test of semiconductor devices with timing sets and per channel pin parametric measurement unit (PPMU)Frequency Counters Perform counter timer tasks such as event counting and encoder position, period, pulse, and frequency measurementsPower Supplies & Loads Supply programmable DC power, with some modules including isolated channels, output disconnect functionality, and remote senseSwitches (Matrix & MUX) Feature a variety of relay types and row/column configurations to simplify wiring in automated test systemsGPIB, Serial, & Ethernet Integrate non-PXI instruments into a PXI system through various instrument control interfaces Digital MultimetersPerform voltage (up to 1000 V), current (up to 3A), resistance, inductance, capacitance, and frequency/period measurements, as well as diode testsWaveform Generators Generate standard functions including sine, square, triangle, and ramp as well as user-defined, arbitrary waveformsSource Measure Units Combine high-precision source and measure capability with high channel density, deterministic hardware sequencing, and SourceAdapt transient optimizationFlexRIO Custom Instruments & Processing Provide high-performance I/O and powerful FPGAs for applications that require more than standard instruments can offerVector Signal Transceivers Combine a vector signal generator and vector signal analyzer with FPGA-based, real-time signal processing and controlData Acquisition Modules Provide a mix of analog I/O, digital I/O, counter/timer, and trigger functionality for measuring electricalor physical phenomena©2019 National Instruments. All rights reserved. LabVIEW, National Instruments, NI, NI TestStand, and are trademarks of National Instruments. Other product and company names listed are trademarks or trade names of their respective companies. The contents of this Site could contain technical inaccuracies, typographical errors or out-of-date information. Information may be updated or changed at any time, without notice. Visit /manuals for the latest information. Hardware ServicesAll NI hardware includes a one-year warranty for basic repair coverage, and calibration in adherence to NI specifications prior to shipment. PXI Systems also include basic assembly and a functional test. NI offers additional entitlements to improve uptime and lower maintenance costs with service programs for hardware. Learn more at /services/hardware .Program Duration 3 or 5 years3 or 5 years Length of service programExtended Repair Coverage●●NI restores your device’s functionality and includes firmware updates and factory calibration.SystemConfiguration,Assembly, and Test 1 ● ●NI technicians assemble, install software in, and test your system per your custom configuration prior to shipment.Advanced Replacement 2 ●NI stocks replacement hardware that can be shipped immediately if a repair is needed.System Return MaterialAuthorization (RMA)1 ●NI accepts the delivery of fully assembled systems when performing repair services.Calibration Plan (Optional) Standard Expedited 3NI performs the requested level of calibration at the specified calibration interval for the duration of the service program.1This option is only available for PXI, CompactRIO, and CompactDAQ systems.2This option is not available for all products in all countries. Contact your local NI sales engineer to confirm availability. 3Expedited calibration only includes traceable levels.PremiumPlus Service ProgramNI can customize the offerings listed above, or offer additional entitlements such as on-site calibration, custom sparing, and life-cycle services through a PremiumPlus Service Program. Contact your NI sales representative to learn more.Technical SupportEvery NI system includes a 30-day trial for phone and e-mail support from NI engineers, which can be extended through a Software Service Program (SSP) membership. NI has more than 400 support engineers available around the globe to provide local support in more than 30 languages. Additionally, take advantage of NI’s award winning online resources and communities .。
Ansoft12在工程电磁场中的应用

图20 相对坐标系统的建立
图21 永磁体属性设置
四、激励源与边界条件定义及加载
1.绕组分相,根据电机设计中绕组排列对三相永磁同步电机定 子槽中的绕组进行分相,各相正绕组用“Phase”表示,负绕 组用“Return”表示。按下图22所示进行分相。
图9 单个定子槽绕组模型
9. 执行Edit/Duplicate/Around Axis命令,沿轴复制,在 Axis选择沿z轴复制,相隔10°,进行36次复制。如图10所 示。
图10 定子槽绕组模型
10. 创建电机定子冲片模型。执行Draw/Circle命令,原点为(0, 0),半径为87mm,名字为“stator”。选择“slot”,利用 Modeler/Surface/Cover Lines生成面。 11.选择“stator”和“slot”,执行Modeler/Boolean/Substract 命令。得到定子模型,如图11所示。
图11 电机定子冲片模型
12. 创建永磁体。执行Draw/Line命令,分布输入(0,49), (0,54)。选择该直线,执行Draw/Sweep/Around Axis命令, 在“Sweep Around Axis”对话框中输入旋转角度为80 °,并 改名为“Permant”。 13.执行Edit/Duplicate/Around Axis命令,沿轴复制,在Axis 选择沿z轴复制,相隔90°,进行4次复制。如图12所示。
图12 永磁体模型
14. 创建电机转子冲片模型。执行Draw/Circle命令,原点为 (0,0),半径为49mm和19mm的两个圆,名字分别为 “rotor”和“rotor1”。 15.选择“rotor”和“rotor1”,执行 Modeler/Boolean/Substract命令,得到电机模型,如图13所 示。 16.利用图标 建立求解区域。
VESA+Generalized+Timing+Formula+(GTF)+Standard
VESA®GTF™ Standard Video Electronics Standards Association860 Hillview Court, Suite 150 Tel: (408) 957-9270 Milpitas, CA 95035 Fax: (408) 957-9277 Generalized Timing Formula StandardVersion: 1.1September 2, 1999PurposeThe VESA Generalized Timing Formula is a standard method for generating general-purpose display timings.While bringing standardization, it does not restrict the market to fixed, pre-defined formats or refresh rates, and thus allows differentiation within a standardized environment.SummaryVESA has defined a standard method by which new formats and timings can be generated. This will allow much greater flexibility in the choice of refresh rates and pixel formats than currently available with existing discrete monitor timings. GTF describes a computational method that will provide standardization, and yet also enable new features, such as user defined image resolution and low-cost, automatic self-alignment of display devices, to be added to graphics systems and monitors,Version 1.1 explains the usage of GTF parameters for a Secondary GTF curve; a concept called “Secondary GTF”.Intellectual PropertyCopyright © 1994, 1995, 1996, 1999 Video Electronics Standards Association. All rights reserved.While every precaution has been taken in the preparation of this standard, the Video Electronics Standards Association and its contributors assume no responsibility for errors or omissions, and make no warranties, expressed or implied, of functionality or suitability for any purpose.TrademarksAll trademarks used within this document are the property of their respective owners. VESA is a registered trademark of the Video Electronics Standards Association.PatentsVESA proposals and standards are adopted by the Video Electronics Standards Association without regard to whether their adoption may involve any patents or articles, materials or processes. Such adoption does not assume any liability to any patent owner, nor does it assume any obligation whatsoever to parties adopting the proposals or standards documents.SupportClarifications and application notes to support this standard may be written. To obtain the latest standard and any support documentation, contact VESA.If you have a product that incorporates GTF TM, you should ask the company that manufactured your product for assistance. If you are a manufacturer, VESA can assist you with any clarification you may require. All comments or reported errors should be submitted in writing to VESA using one of the following methods.direct this note to Technical Support at VESA957-9277,•Fax: (408)•Email: support@Support•Mail: TechnicalVideo Electronics Standards Association860 Hillview Court, Suite 150Milpitas, CA 95035AcknowledgmentsThis specification would not have been possible without the valuable contributions and support from the following members of the GTF work group:Andy Morrish (GTF Work Group Leader) National SemiconductorDave Eagle IBMRicky Jackson IBMHans van der Ven PanasonicBob Myers Hewlett-PackardAnders Frisk ICLTom Ryan SciTechKendall Bennett SciTechJoe Goodart CompaqPaul Doyle SonyVersion 1.1Anders Frisk (GTF Document editor, work group leader) NokiaHans van der Ven PanasonicJoe Goodart DellAlain d’Hautecourt ViewSonicGTF EXCEL TM SPREADSHEETAs part of this standard, a companion EXCEL TM V4.0 spreadsheet is available from the VESA FTP site (GTF_V1R1.XLS), or from the VESA office. This spreadsheet illustrates the GTF method and allows manual computation of timing parameters and demonstration of the computation method. This written specification documents the mathematical methods behind the spreadsheet in order to demonstrate how GTF can be programmed into software.In case of any confusion or dispute regarding interpretation or calculation of any of the GTF variables in any implementation, the released version of GTF spreadsheet shall be used as the definitive calculation method to demonstrate correct computation of the parameters.REVISION HISTORYVersion 1.0 Revision 1.0, December 8, 1996Initial release of GTF StandardVersion 1.1Secondary GTF curve concept defined.TABLE OF CONTENTSINTELLECTUAL PROPERTY (2)GTF EXCEL TM SPREADSHEET (3)REVISION HISTORY (3)1. INTRODUCTION (5)2 TERMS AND DEFINITIONS (6)2.1T IMING P ARAMETERS (6)2.2S YNC P ULSE P OSITION (7)2.3S YNC P ULSE P OLARITY (7)2.4B ASIC H ORIZONTAL B LANKING D UTY C YCLE F ORMULA (8)2.5A CCURACY OF T IMING P ARAMETERS (10)2.6E XTENDED H ORIZONTAL B LANKING F ORMULA (11)3 DEFAULT PARAMETER VALUES (14)4 SYSTEM VARIABLES (15)5 COMMUNICATING GTF COMPLIANCE THROUGH DDC/EDID (16)5.1.D EFINITION OF GTF-C OMPLIANT M ONITORS AND G RAPHICS S YSTEMS (16)5.3GTF S YSTEM D RIVER WITH GTF-C OMPLIANT M ONITORS (16)5.4GTF S YSTEM D RIVER WITH N ON-GTF DDC M ONITORS (16)5.5GTF S YSTEM D RIVER WITH U SER D EFINED L IMITS FOR N ON-GTF M ONITORS (17)5.6S UMMARY OF M ONITOR D EFAULT GTF C OMPLIANCE (18)6 SECONDARY GTF (18)7 COMPUTATION OF TIMING PARAMETERS (19)7.1F LOW C HART OF GTF M ETHOD (19)7.2R OUNDING D EFINITION (21)7.3U SING V ERTICAL R EFRESH F REQUENCY TO F IND S TAGE 1P ARAMETERS (21)7.5U SING P IXEL C LOCK F REQUENCY TO F IND S TAGE 1P ARAMETERS (24)7.6U SING S TAGE 1P ARAMETERS TO D ERIVE S TAGE 2P ARAMETERS (26)APPENDIX A (30)FIGURES AND TABLESF IGURE 1:S YNC P ULSE T IMING D EFINITIONS (7)F IGURE 2:B ASIC H ORIZONTAL D UTY C YCLE C URVE (10)F IGURE 3:B LANKING D UTY C YCLE C URVES WITH V ARIATIONS IN K (12)F IGURE 4: E XAMPLES OF V ARIATIONS IN K, J, C AND M (13)F IGURE 5:T HE GTF C ALCULATION (20)T ABLES 1A AND 1B:GTF S YNC P OLARITIES (8)T ABLE 2:D EFINITION OF [I/P PARAMETER] (15)T ABLE 3:S UMMARY OF M ONITOR D EFAULT GTF C OMPLIANCE (18)1. INTRODUCTIONGTF is a standard method for generating general-purpose display timings. While bringing standardization, it does not restrict the market to fixed, pre-defined formats or refresh rates and therefore allows differentiation within a standardized environment.GTF is intended as a tool to be used by all parties concerned with video signal generation. Video graphics software drivers should utilize the GTF method to generate timing parameters for any new, previously unspecified video modes, either spontaneously within the PC from a set of system inputs, or in pre-defined and stored tables. Video graphic generation hardware should use and be compatible with the GTF method for definition of any new modes of operation. Monitor designs should use the GTF method to determine how to interpolate for new unrecognized timings, and consequently set image size and geometry parameters.A principle objective of GTF is to allow predictable timing parameters to be derived from minimal information. Using GTF, it is possible to construct a complete set of timing parameters given the following basic information:Using any one of the three options in (4) above, the same timing parameters will result from GTF. This allows the calculation to be ‘driven’ by intelligent system software to obtain best overall system performance, especially in conjunction with plug and play peripherals that can communicate the hardware capabilities. For example, knowing the limitations of a CRT display in vertical and horizontal scan frequencies, the maximum pixel clock rate of a graphics card, the desired vertical refresh rate of a User and the pixel format from an application, new system software can generate a new timing to meet the constraints of the hardware. Most importantly, the GTF method also allows the possibility for displays to predict where the image may fall, and thus enables the possibility of automatic image set up for any new mode.A further objective is to minimize compatibility problems that frequently result when graphics cards generate unique timings or cannot meet the exact timing parameters of standard formats. GTF provides a means for graphics cards to generate these unique timings based around default timing characteristics that can be supported by most monitors.Another use of GTF is to enable new timing parameters to be generated for displays running at a constant horizontal scan frequency, potentially allowing simplified and lower-cost display designs. This will also result in maximized vertical refresh rates, which is generally seen as an ergonomic advantage.In order to minimize the amount of information required at time of computation, and also to ensure basic standardization and compatibility in formats that are produced, it is necessary to standardize the values of all other variables that influence the calculation of timing parameters. In this specification, a standard definition and default value is given to each of these variables, in addition to a standard method of timing parameter computation.The GTF standard can be used with any pixel clock reference frequency, and will provide timings within the hardware constraints of this and other system parameters. However, it is expected that some applications will continue to require specific discrete timing standards, as in the case of timings intended to be compatible with video or other systems. In order to permit such timings to be produced as precisely as possible, and to increase the likelihood that controllers from different manufacturers will produce identical timings using either GTF or current and future discrete timings, VESA recommends that the fixed reference frequency (i.e. typically the fixed crystalreference used by the video phase locked oscillator for subsequent programmable pixel clock synthesis) be one selected from the N x 2.25MHz family of rates. This set has been selected for its compatibility with worldwide video timing standards, and will also be used wherever possible in future Discrete Monitor Timing (DMT) standards produced by VESA. While this is a recommendation, it should be noted that use of a reference from this particular set is not a requirement for compliance to the VESA GTF standard.Secondary GTFSecondary GTF is a method for using the generalized timing formula to describe two separate functions that describe the relationship between the monitor timing signals. Both functions use the same formula, but with different parameter values. By using the default parameter values as defined in this document you produce the default GTF curve. This curve describes the relationship between horizontal frequency and blanking time. The default GTF curve is suitable for most CRT monitors, however, there are monitor designs that can work with shorter blanking times than what the default GTF describes. The second GTF curve can be used to describe the relation between timing signals when the monitor is operating in a mode with reduced blanking.2 TERMS AND DEFINITIONS2.1 Timing ParametersSeveral different sync formats are used by display systems, including separate syncs, composite syncs and sync-on- green. GTF has been formulated for optimum compatibility. In addition, careful consideration has been given to the choice of sync width and positioning relative to the video to ensure best operation with the majority of present day display technology.The following definitions are used within this specification to describe the important timing intervals (see figure 1): Addressable Video (t video)The period during which active image video information is transmitted.Margin (t margin)The period during which background colored border maybe displayed in order to allow the CRT image to extend beyond the limits of the surrounding bezel on overscan type monitors. Typically, the margin period cannot be addressed on an individual pixel basis by the image buffer. On most non-overscan type systems, the margin period is zero.Blanking (t blank)The period between the end of one line (horizontal) or frame (vertical) of the video and margin period, and the start of the next line or frame of video.Sync pulse width (t sync)The period of the active sync pulse.Front porch (t fp)The period between the end of one line (horizontal) or frame (vertical) of the video and margin period, and the start of the sync pulse.Back porch (t bp)The period between the end of the sync pulse and the start of the next line (horizontal) or frame (vertical) of the following video and margin period.Figure 1: Sync Pulse Timing Definitions2.2 Sync Pulse PositionA major source of incompatibility in discrete timings is the variability in position of the sync pulses within the blanking period, which in turn causes variation in the displayed image position. To overcome this, GTF uses a standard definition to ensure the predictability of the sync position within the blanking period.From the following information (see also Section 3 - DEFAULT PARAMETER VALUES), and that attained during manufacturing alignment, it is possible for display devices to estimate to a reasonable degree of accuracy where to position the image of any new previously unknown modes.The horizontal sync pulse period is defined as a fixed percentage of the total line period. The trailing edge of the pulse is positioned exactly midway within the total blanking period. This ensures there is always sufficient time after the sync pulse for the generation of video DC recovery signals. The vertical sync pulse is defined as a fixed integer number of horizontal line periods. The position of the vertical sync pulse is determined by the front porch period, which is also set as a fixed number of horizontal line periods. For the special case of interlaced displays, an additional half line is added to this period for alternate fields.2.3 Sync Pulse PolarityThe sync polarities used for Default GTF should be as follows in Table 1a:The sync polarities used for Secondary GTF should be as follows in Table 1b:Table 1bTables 1a and 1b: GTF Sync PolaritiesChoice of sync pulse polarity is important because this aids the monitor in identifying which particular mode is being displayed, and therefore how to set the parameters controlling the displayed image size and position, etc. While all combinations of polarities exist in use, some polarity combinations are used more than others; for instance, VESA DMTs typically use positive going sync signals.An additional consideration is that the GTF timing for 640x480 at 31.5kHz gives horizontal timing parameters identical to standard VGA when no margins are used. However, under these conditions, the vertical refresh rate is slightly faster. To avoid confusion between these modes, the GTF sync polarities have been chosen to be different from those of standard VGA.2.4 Basic Horizontal Blanking Duty Cycle FormulaHorizontal blanking duty cycle has a great impact on the system design, particularly as there are many opposing requirements. Making blanking time long, for instance, has both advantages and disadvantages:Advantages:•Lower cost, lower power dissipation horizontal scan/CRT yoke design at high frequencies•More time for video RAM update during blanking intervalDisadvantages:•Higher power dissipation horizontal scan/CRT yoke design at low frequencies•Higher pixel clock operation, more expensive graphics chip sets, RAM, etc.•Higher video rate and amplitude, requiring expensive, high power dissipation video amplifiers•More RFI (radio frequency interference)•Lower brightness/higher instantaneous CRT drive requirements, giving poor spotsize, focus, etc.Variations in blanking times between formats also causes major differences in the displayed image width and position. For predictability of any standard timing, it is imperative for the GTF to have a standard method to define (and thus predict) the blanking time at any operating point. As communication between monitor and CPU cannot be assumed, it must be possible for the monitor to be able to compute the blanking time, using either analog or digital methods, by using a simple relationship linking blanking time to the horizontal period or frequency.When defined as a percentage of the horizontal period, blanking duty cycle is given by:Blanking Duty Cycle(%) = (1 - (t active/ T))*100 (%) [1]where:t active=the active video timeT= the horizontal period =1/Fwhere:= Horizontal frequencyFNote also that active video time can be expressed as:[2]t active = _n_pwhere:n = no of horizontal active video image pixels=Pixel clock frequencyPCombining these, the blanking duty cycle can also be simply expressed as:Blanking Duty Cycle (%) = (1 - (F * n))*100 (%)[3]These various forms of the same definition are used within the GTF to derive different horizontal timing parameters.The general form of the horizontal blanking equation used within the GTF is:Blanking Duty Cycle(%) = C’ - (M’/F) [4]where:F = Horizontal frequency (kHz)Basic o ffset c onstant (%)C’=Basic g radient constant (%/kHz)M’=This equation has been chosen for its empirical best fit to the average existing industry standard timings used withmost monitors.Figure 2 below shows a scatter plot of some standard timings and the curve resulting from this equation using defaultvalues of:C’=30Figure 2: Basic Horizontal Duty Cycle CurveIt can be seen that the empirically derived curve lies midway between existing modes. It also hits the 20% point at the 60Hz VGA frequency, which is a valuable aid to compatibility.Using the formula linking blanking time to horizontal frequency, it is possible to establish a direct relationship between pixel clock frequency and horizontal frequency:Combining equations [3] and [4] gives:F = 2 * M’________ [5](C’-1) +/- sqrt{((1-C’)2 ) + (4*M’*n) }{This unique relationship between these parameters is a critical feature of GTF. For any given pixel format, there is always a direct relationship between pixel clock and horizontal frequency - if one parameter is known, the other can be computed. It is this attribute that allows the mode definition to be reduced to the simplified form of requiring only one defining frequency.2.5 Accuracy of Timing ParametersThe equation given in [4] above, has a fundamental importance to the design of a system that will allow automatic centering and width adjustment in a monitor when new modes are encountered. By measuring the horizontal frequency (a requirement in multisync monitors for mode recognition) blanking duty cycle, and hence, period, can be easily computed.Theoretical accuracy of the predicted image position is limited due to the quantization effect arising from the numberof pixels within the character cell and subsequent rounding errors. This results in a theoretical error of +/- half acharacter cell in the horizontal position of either side of the image, giving a total possible error of +/- one charactercell in width and overall centering. In practice, small errors may also result from inaccuracies of the deflectionsystem, depending upon the quality of the display system design.The accuracy of blanking period determination (and subsequent size estimation for a new mode) within the monitorwill be dependent upon each individual implementation, but this allows the monitor designer considerable scope fortrading off accuracy versus cost/complexity. As a standard formula is used, monitors can use microprocessors toeither compute the blanking time (having measured horizontal frequency)directly, or by using look-up tables. Analogmonitors can use analog computational methods, converting frequency to voltage to derive an analog signalproportional to the blanking time.2.6 Extended Horizontal Blanking FormulaIn order to make GTF as general as possible, and also to allow future GTF versions for display devices other thanCRTs (which may require considerably different values of timing parameters) the basic constants C’ and M’ withinthe basic horizontal blanking formula have been expanded. The Secondary GTF concept introduced in version 1.1 ofthis standard defines how these parameters are used to define a Secondary GTF curve for displays that can operatewith reduced blanking above a certain horizontal frequency:[C’]=(([C]-[J])*[K]/256)+[J] [6][7] [M’]=[K]/256*[M]Where:C = Extended offset constant (%)M = Extended gradient constants (%/kHz)K = Blanking time scaling factorJ = Scaling factor weightingNote that:C’ = JM’ = 0for K = 0and:C’ = CM’ = Mfor K = 256Software versions of GTF should code the coefficients C’ and M’as variables defined in this way, even though theyare subsequently treated as constants. Specifically, K, the blanking time scaling factor, allows a single coefficient tobe used to alter the characteristics of the basic blanking equation. Altering K from its default value of 128 allows aseries of curves to be produced passing through the 20% duty cycle at VGA frequencies, but with higher or lowerblanking duty cycle at high frequencies, as show in figure 3.Figure 3: Blanking Duty Cycle Curves with Variations in KWhile the majority of applications will use the default values for C, M, K and J, future applications that support a secondary GTF curve as defined in the Secondary GTF chapter of this document will use other values for these parameters. However, in the absence of explicit support for a second GTF curve listed in EDID, the defined default values must be used at all times. Figure 4 shows the effect of variations in the extended blanking constants.K=256, J=ANY VALU E,C in in crem ents of 5, M in in crem en ts of 100M =300, K=256, J=ANY VALU E,C in in crements of 5C=30, K=0, M = ANY VALU E, J in in crem ents of 10C=40,J=20, M = 600, K in in crem ents of 64Figure 4: Examples of Variations in K, J, C and M on Blanking Time versus Horizontal Frequency3 DEFAULT PARAMETER V ALUESIn the GTF formula, several parameters are defined that are considered constants although they should in fact be treated as variables with a defined value. These variables define critical timing parameters and are vital for the GTF system to operate satisfactorily that consistent values are used within any given system. In order to meet these requirements a default set of values has been set for the default GTF curve for use with CRT displays.VESA recognizes that as display technologies improve, different parameter values may be required in the future; for example, a flat panel display device may require shorter blanking times. It may be possible to allow the variables to be changed by allowing the display device to send information to the system detailing that it can use different values for these parameters than specified by the default values. However, in order to maintain GTF compatibility, it will be a prerequisite that variables with a different value shall only be used when bi-directional communication exists between the display device and the graphics system. The Secondary GTF method described in section 6 of this document is an example of how other parameter values can be used. The exception to this is the character cell granularity default value, [CELL GRAN]. The default value is the value that may be assumed by the other components in the system (e.g., the monitor), but the graphics system itself should use the smallest value available at the given operating point.The following parameters are used within the GTF calculations. The default values should be used in all cases except as outlined above:[MARGIN%]DEFAULT VALUE: 1.8%The size of the top and bottom overscan margin as a percentage of the active vertical image.[CELL GRAN]DEFAULT VALUE: 8 pixelsThe assumed character cell granularity of the graphics system. In practice, the system may use a different number, although minimum values should always be used where possible.[MIN PORCH]DEFAULT VALUE: 1 line/char cellThe minimum front porch in lines (vertical) and character cells (horizontal)[V SYNC RQD]DEFAULT VALUE: 3 linesThe width of the V sync in lines.[H SYNC%]DEFAULT VALUE: 8%The width of the H sync as a percentage of the total line period.[MIN VSYNC+BP]DEFAULT VALUE: 550usMinimum time of vertical sync + back porch interval (us).[M]DEFAULT VALUE: 600%/kHzThe blanking formula gradient (see also section on blanking formula).[C]DEFAULT VALUE: 40%The blanking formula offset (see also section on blanking formula).[K]DEFAULT VALUE: 128The blanking formula scaling factor (see also section on blanking formula).[J]DEFAULT VALUE: 20%The blanking formula scaling factor weighting (see also section on blanking formula).4 SYSTEM V ARIABLESAs most of the parameters that define the timings have been previously defined by default values, there are only 6 variables that can normally be varied under system control to affect the timing outputs. These are:[H PIXELS]:This is the number of active image pixels displayed on a line, not including any margin.[V LINES]:This is the number of vertical lines in the displayed image.[MARGINS RQD?]:If margins are required, this flag is set as Y, if not, no margins are assumed. Margins maintain a constant blanking time in both vertical and horizontal scans; they add an integer number of character cells (horizontal) or lines (vertical) around the active image area. As the pixel format of the image is maintained, this consequently increases the pixel clock rate and reduces the vertical refresh rate. Margins are generally only used in overscan applications.[INT RQD?]:If interlace is required, this flag is set as Y, if not, non-interlace is assumed. (If interlace is requested, the number of vertical lines assumed by the calculation must subsequently be halved, as the computation calculates the number of vertical lines per field).[I/P PARAMETER]:In the definition used within this spec, the variable [I/P PARAMETER] is used to indicate which frequency parameter will be specified, as in Table 2:REQUIRED PARAMETER VARIABLE[I/PPARAMETER]1 VERTICAL FRAME FREQUENCY (Hz) [V FRAME RATE RQD]2 HORIZONTAL FREQUENCY (kHz) [H FREQ]3 PIXEL CLOCK RATE (MHz) [H PIXELS]Table 2: Definition of [I/P PARAMETER][I/P FREQ RQD]:This is a real number that is used to signify the frequency in Hz for vertical refresh (i.e. 60 = 60Hz), kHz for horizontal (60=60kHz) or MHz for pixel clock (60 = 60MHz).5COMMUNICATING GTF COMPLIANCE THROUGH DDC/EDID5.1. Definition of GTF-Compliant Monitors and Graphics SystemsTo be 'GTF-compliant' a monitor should be designed such that it treats any new, unknown modes with sync signal polarities according to section 2.3 as GTF modes. The monitor hardware and/or software shall be optimized to minimize any position or size errors in the displayed image based upon that assumption. No portion of any GTF derived image should be hidden or reversed, and any GTF image should be completely visible within the displayable area.The EDID of a GTF-compliant monitor shall signify that the GTF assumption is used for new mode calculation by setting appropriate GTF flags in EDID and must communicate the limits of operation in a Monitor Descriptor Block according to section 5.2. If no limits of operation are included, the monitor must be treated as non-GTF compliant, as per section 5.4 or 5.5.GTF-compliant graphics systems must be capable of determining whether the attached monitor is GTF-compliant, through reading the EDID, and must be capable of handling both GTF-compliant and non-GTF monitors according to the methods outlined below. Any new formats produced by the graphics system must be created with all timing parameters according to the GTF definition.In all cases, when the graphics system derives new timings, the system software must ensure that all timing parameters produced remain within the limits of capability of the hardware. If the value of an input parameter (such as a refresh rate requirement) causes the output parameters to lie outside of the range of capabilities of the hardware, the system should not allow the use of that timing.5.2Communicating Limits of Monitor Operation for GTF Compliant MonitorsThe GTF-compliant monitor must communicate its range of operation by defining the Pixel clock, Horizontal and Vertical scan frequency ranges in a Monitor Range Limits Descriptor block within the EDID structure version 1, revision 1 and higher.The GTF-compliant graphics system must be capable of reading these limits and using them to calculate any new timing requirements.5.3 GTF System Driver with GTF-Compliant MonitorsIf the EDID indicates that the monitor is GTF-compliant the graphics system using the GTF method may automatically generate new timings within the range of the operating frequencies as signified in the Monitor Descriptor block.5.4 GTF System Driver with Non-GTF DDC MonitorsThis method should only be used for non-GTF monitors (i.e.,: when bit 0 of the 'Feature Support' byte is set to 0, or if no Monitor Descriptor Block is included). It is included mainly to allow existing DDC monitors to be used with a GTF system driver.It must be noted that the non-GTF monitor may not be capable of automatically displaying the image on the screen within acceptable limits of operation, or may require significant manual adjustment by the User. When a monitor with bit 0 of the 'Feature Support' byte set to 0 is used, it is mandatory that the system software display a suitable warning message to the User stating that the User should check for normal operation of the monitor and that adjustment may be necessary before switching to the new GTF mode. It is also recommended that the system will prompt the User to confirm that the new mode is viewable within a specified time period. If no confirmation is received by the end of that period, the system can revert back to the previous known preset mode.。
Tie-In and Flowline Systems
Tie-In and Flowline SystemsSubsea Flowlines are used for transportation of crude oil and gas from the wells into the manifolds and onward to process facility, loading buoy or even to shore. Flowlines may also be used for transportation of water or gas to be injected back into the reservoir when required. Tie-in and connection of these subsea flowlines is a vital part of the development of a subsea field.FMC Technologies provides complete tie-in and flowline solutions throughout the development of a subsea field with a wide range of connection products from 2” to 36”, single-bore and multi-bore, which have proven reliability for major oil companies worldwide.FMC's horizontal and vertical tie-in systems have been extensively installed in many of the deepest, highest-pressure and largest-diameter subsea applications around the world.Systems & ProductsHorizontal and Vertical Tie In SystemsOver the past decade, FMC Technologies has developed a complete range of horizontal and vertical tie-in systems and associated connection tools used for the tie-in of flowlines, umbilicals and jumper spools sizes 2” - 30” and for single and multi-bore application. FMC’s horizontal and vertical tie-in systems have been extensively installed in many of the deepest, highest pressure and largest diameter subsea applications around the world.Systems & ProductsFLYCONFMC’s FLYCON flying lea d connection system is designed to install and connect hydraulic and electrical umbilicals (jumpers) between subsea modules and structures by use of a standard work-class ROV. Jumpers are launched to the location in tailor-made baskets. Various configurations of hydraulic jumpers and flying leads can be supplied to suit a variety of applications.ROVCONFMC’s ROVCON ROV-based tie-in and connection system is designed for both first-end and second-end tie-in of flowlines and umbilical’s. ROVCON is attached underneath a work-class ROV. The tie-in skid package performs tie-ins using two winches. The stroking cylinders conduct the final pull-in and closing of the connector. The system includes a set of ROV operated tools for hub preparation prior to connection.Advantages of the ROVCON® Tie-in system is that it is designed to perform a series of tie-ins and connections of prelaid lines without returning to the surface. The system is very compact, requires minimal mobilization, and is air transportable. The ROVCON® Tie-in systems have connected hundreds of flowlines and umbilicals for major oil companies world-wide.Universal Connection System-Horizontal (UCON-H)The Universal Connection System-Horizontal mode is a ROV tool based system for horizontal connection of rigid spools, flexible flowlines, and umbilicals to manifolds, satellites, PLEM’s, PLET’s, TEE’s and riser bases.The system is developed as part of the Statoil/FMC joint technology development project "Subsea MMX", and it may connect both the standard KC4 collet connectors and the new Insulated KC4-I connectors. Due to UCON-H ROV-based tooling, multiple connection operations can be performed without returning to the surface vessel. This results in a very time efficient subsea operation when sealines are ready for connection.The main features of the UCON-H system are:- Basic ROV tooling- High alignment performance- Field-proven connectors (KC4-family) and gaskets, mono and multibore, horizontal, insulated and non-insulated- Guides on the inboard hub (no tolerance requirements to the structure)- Easy to scale (easy to apply for the range of available connector sizes and insulation requirements)- Stroke in/stroke back for contingency operations (seal replacement) included parking functionality available (parking and lock jumper end on foundation for module retrieval)- Requires minimal mobilization and crew, and the ROV tooling is air transportable worldwideVertical Tie-In SystemsThese systems provide vertical landing and connection for the first and second end of flexible flowlines, rigid jumpers, rigid flowlines with flexible tails, flowline risers and umbilicals. Vertical Connection Systems may connect of up to 30” OD (27” ID) to manifolds, subsea trees, SLEDs, PLETs and PLEMs. These systems have no interference with the seabed during installation and connection, increasing the subsea visibility during installation.The Vertical Connection systems does not require flowline pull-in capability, simplifying all functions and providing a time efficient subsea tie-in operation. Stroking and connection is carried out by the the connector itself, or by the ROV operated Connector Actuation Tool (CAT) System.ProductsThe MAX Tie-in System is based on the MAX Mechanical Collet Connector. The MAX connector is a robust 15ksi design developed for high jumper load (i.e. HP / HT) conditions. This connector design leaves no hydraulic components subsea after installation. Make-upof the collet connector is performed by the Connector Actuating Tool (CAT), operated by the ROV. Hub inspection and cleaning prior to connection is performed by ROV with dedicated tool package.The MAX connection system is suitable for up to 14” ND fl owlines and features:∙Working pressure up to 15,000 psi∙MAX-8 designed to accommodate up to 8” pipe; MAX-14 up to 14” pipe∙High bending, torsion and preload capabilities for HP / HT applications∙All hydraulic components for Tie-in integrated in CAT∙Positive pre-load via fl at-to-fl at locking mechanism∙Primary Metal to Metal seal, secondary non-metal seal∙CAT performs hub alignment, soft land and boot strap during installation∙CAT performs external Lock/Unlock and secondary unlock of MAX connectorTorus Tie-In SystemThe TORUS Tie-in System is based on the TORUS Hydraulic Connector. This connector has all hydraulic tie-in functions incorporated in the connector and consequently requires no tool for operation.The Torus connection system is suitable for up to 18” ND flowlines and features:∙Hydraulic lock/unlock design∙Hydraulic secondary release mechanism∙Mechanical override feature∙Positive pre-load via fl at-to-flat locking mechanism∙Primary Metal to Metal seal, secondary non-metal seal∙External seal test feature for subsea verifi cation of proper connectionVECON Tie-in SystemThe Vertical Connection System (VECON®) is designed to install and vertically connect flexible flowlines, rigid spools, rigid flowlines with flexible tails, flowline risers and umbilicals. The collet connector with the Vertical Connector Actuation Tool (V-CAT) is lifted directly onto the receiving hub in one operation. These systems have no interference with the seabed during installation and connection, increasing the subsea visibility during installation. Based on the KC mechanical connectors, this system leaves no hydraulic components subsea, and may be used in both mono and multibore configurations.With the V-CAT mounted directly on each collet connector, this connection system is a time efficient way of connecting lines. Since the VECON system does not require a pull-in capability, it simplifies the tool functions and provides a time efficient tie-in operation. The connection system ( CAT ) is very compact, requires minimal mobilization, and is air transportable worldwide.Tie In Structures & ModulesEach Tie-in & Connection point requires a subsea base structure. This base may be on a single well structure, on a template, on a manifold, or on an individual structure. Individual structures may also contain manifold equipment such as isolation valves, pig-launchers and sensors (Riser Base, Pipeline End Manifolds PLEM, Pipeline End Termination PLET, Tee and Wye- stations).FMC manufacture a range of Tie-in structures and Modules. Each system is tailor made to suit clients specific requirements but based on standard interfaces and components.Jumper SpoolsSatellite wells positioned some distance from the central manifold may be Tied-in by use of rigid or flexible Jumper Spools. Jumper spools may also connect other subsea structures such as PLEM/PLETS and Riser Bases. The Jumper Spools have a vertical or a horizontal Collet connector at each end. Installation of these Spools is done by a simple crane operation assisted by ROV and guide wires when required.FMC manufacture a range of Jumper Spools to suit individual clients specific requirements, but based on standard interfaces and components. These solutions have a proven track-record on major subsea oil development areas world-wide.ROV ToolsAll subsea Tie-in & Connection operations require assistance from the ROV ( Remote Operated Vehicle). The ROV may observe, use the manipulators to do simple tasks, or perform advanced intervention operations by use of a tailor made ROV tool. Efficient ROV operation is vital during tie-in and connection.FMC has performed a large number of tie-in & connection operations with assistance of ROV. A complete set of ROV Tools is developed in accordance with all international standards and interfaces. Focus is on reliable design and thorough testing of running procedures to perform a rational subsea operation.ConnectorsConnectors are used to make a tight connection between two fluid carrying elements. Most of the fluid is carried under high pressure, and /or high temperature. The connection may also be exposed to high external pressure as a result of the deep waterdepth.FMC Tec hnologies provide a series of standard connectors from 2” to 36 “ both single- and multi-bore and provides: mechanical release capabilities, optional secondary hydraulic release capabilities, visual lock/unlock indicators.Application-specific features such as high-angle release and soft-landing capabilities are provided where necessary.Each connector is submitted to rigorous qualification testing before implementation in the field. All connectors are tested to actual field loads, and, in addition, most connectors are tested to structural failure. FMC's connectors are tested well beyond industry standards, making FMC an industry leader in connector testing.Clamp Collet TorusClamp ConnectorsClamp Connectors are based on a 2 segmented clamp screwed together around two hubs. Clamp connectors may connect both single and multi-bore connections, and are mainly used in horizontal applications.FMC Technologies provide a series of standard connectors from single-bore (10") and multi-bore (6" + 2" + 14 hydraulic lines) to large 36" export lines.FMC’s KLV-8 Clamp Connector has extensive field experience from the North Sea used in both horizontal and vertical applications with working pressure to 15,000 psi and 10,000 ft. w.d.The KLV-8 features:∙Equivalent Bending and Torsion capacity same as MAX-8 connector∙Backwards compatible with existing MAX-8 hubs, hub support structures and gaskets∙Available as a fully-insulated Connector∙Utilizes a ROV Torque Tool for clamp actuation, eliminating permanently installed hydraulics and/or product specific toolingThe KLV-8 offers:∙Lowers installed cost for well and flowline jumpers∙Eliminates need for proprietary hydraulic connector actuation tools (CATs), significantly reducing running tool costs for the project ∙Simplifies logistics during jumper installation by allowing more jumpers to be carried offshore per deploymentColletFMC offers the KC-4 and KC-5 Collet Connector designed for connection of subsea flowlines, risers, and XT-wing hubs, to the different parts of the subsea production systems. These may be operated horizontally or vertically. The connectors can be fitted with several bore configurations, from the nominal full-bore, to smaller mono-bore and multi-bore versions, including umbilicals. Connectors are made up by either internal hydraulic operation, or by an external Connector activating tool (CAT ), leaving no hydraulic components subsea.KC-4 Collet ConnectorThe KC-4 is qualified according ISO 13628-4. The connectors features a compact hub design, slim moment balanced fingers and the F/F (flat-to-flat) geometry between actuator ring and fingers, which provides self-locking of connector and enables a high mechanical advantage (preload/make-up load ratio).The connector is designed to maintain pretension of the hub-faces in all load cases. The need for separate locking device is eliminated. This has a positive impact on the operational procedures. A further advantage is that preload of the connector is factory set and not subjects to service personnel intervention.KC-5 Collet ConnectorThe KC-5 has an HP/HT design ( High Pressure/High Temperature Design Pressure, 690 bar) and is ISO 13628-4 qualified. They feature an API hub design, slim moment balanced fingers and the F/F (flat-to-flat) geometry between actuator ring and fingers. This provides a self-locking feature of the connector and enables a high mechanical advantage (preload/make-up load ratio).Torus ConnectorThe Torus connectors are a family of hydraulically or mechanically actuated connectors for subsea applications.The connectors are used in a variety of applications, including subsea tree, tubing head, riser, jumper, and flowline applications. Torus connectors are available for bore sizes from 4" to 30", with internal pressure capacity up to 15,000 psi. The larger connectors have bending capacities up to 10 Million ft-lbs.The connectors are locked by downward movement of a primary locking piston behind locking segments to form a nearly 360o contact with the hub profile. The pressure required to unlock the connector is generally less than ½ of the required lock pressure. The design incorporates a self-locking flat-to-flat interface between the primary piston and locking segments that keeps the connector locked once hydraulic pressure is released. A factory set adjustment ring establishes precise, repeatable connector preload settings.。
Motorola 无线手机产品说明书
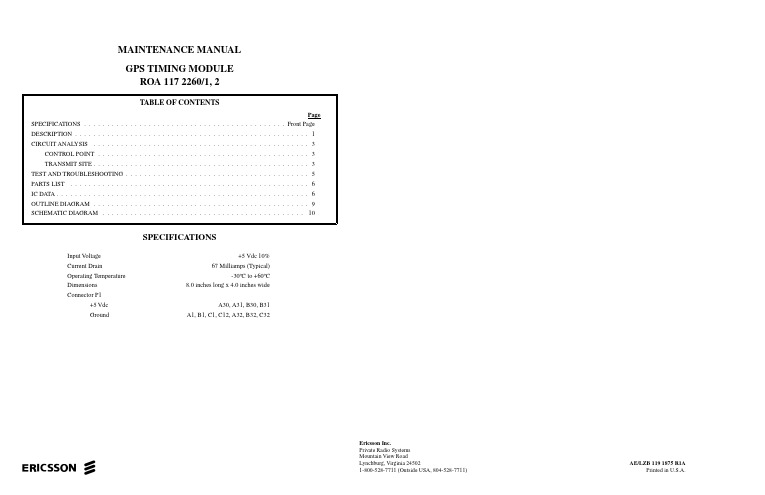
MAINTENANCE MANUAL GPS TIMING MODULE ROA 117 2260/1, 2ericssonzSPECIFICATIONSInput V oltage +5 Vdc 10%Current Drain 67 Milliamps (Typical)Operating Temperature -30ºC to +60ºCDimensions 8.0 inches long x 4.0 inches wideConnector P1+5 Vdc A30, A31, B30, B31GroundA1, B1, C1, C12, A32, B32, C32Ericsson Inc.Private Radio Systems Mountain View RoadLynchburg, Virginia 24502AE/LZB 119 1875 R1A1-800-528-7711 (Outside USA, 804-528-7711)Printed in U.S.A.DESCRIPTIONG lobal P ositioning S atellite (GPS) Timing Module ROA 117 2260 is used in the GPS Simulcast Synch Shelf. There are multiple Synch Shelves in the GPS Simulcast System, one at the Control Point and one at each Transmit Site. Each Synch Shelf has two GPS Timing modules, A and B. Each of these are fully redundant.The Timing Module plugs into slots 9 & 10 of the Synch Shelf located at both the Control Point and the Transmit Site.At the Control Point, the Timing Module is an ROA 117 2260/1 and the module at the Transmit Site is an ROA 117 2260/2. One difference is that there is a different PROM in socket XU1 with different programming used between the two locations. Also, front panel LED’s and labels differ: CPTM for C ontrol P oint T iming M odule (Figure 1) and TXTM for T ransmit(X)T iming M odule (Figure 2).The Timing Module has three functions. Each function, though related, is performed differently at each location, control point or transmit site. At the Control Point, these functions:•Generate 300 Hz FSL (Frame Sync Line)•Generate Composite References•Select 9600 Hz ClocksAt the Transmit site, these functions:•Select 9600 Hz clocks•Recover references from composites•Control T1 delayRefer to Figures 1 and 2. The following is a description of the LED indicators found on the front panel of the modules.•PWR - Green LED indicates when power is applied to the module.•ACTV - Green LED indicates when this is the active module.•MAJ - Red LED indicates when a major alarm condition exists.•MIN - Yellow LED indicates when a minor alarm condition exist.•GPS - Yellow LED indicates that there is no signal coming from the GPS receivers. This is at the Con-trol Point.•LL - Yellow LED, at the transmit site, indicates that there is no signal coming from the GPS receivers andthe Land Line signals are being used.•FSL - Yellow LED indicates there is a loss of the Frame Synch Line at the Control Point.•REF 2 - Yellow LED indicates when there is a loss of composite reference 2 at the Transmit Site.•PROG- Switch resets PROM U1 and the Xilinx (FPGA) module U4 to the initial state.•TEST - Connector is an RJ12, 8-Pin connector used for test purposes (Refer to TEST AND TROU-BLESHOOTING). Connector P1 DefinitionCopyright © September 1996, Ericsson Inc.NOTERepairs to this equipment should be made only by an authorized service technician or facility designated the supplier. Any repairs,alterations or substitution of recommended parts made by the user to this equipment not approved by the manufacturer could voidthe user’s authority to operate the equipment in addition to the manufacturer’s warranty.This manual is published by Ericsson Inc., without any warranty. Improvements and changes to this manual necessitated by typographical errors, inaccuraciesof current information, or improvements to programs and/or equipment, may be made by Ericsson Inc., at any time and without notice. Such changes will be in-corporated into new editions of this manual. No part of this manual may be reproduced or transmitted in any form or by any means, electronic or mechanical, in-cluding photocopying and recording, for any purpose, without the express written permission of Ericsson Inc.AE/LZB 117 1875 R1A1Figure 1 - Control Point Timing Module Front PanelFigure 2 - Transmit Site Timing ModuleAE/LZB 117 1875 R1A 2CIRCUIT ANALYSISFunctional circuitry is primarily contained in a Xilinx 3190A FPGA(F ield P rogrammable G ate A rray) integrated circuit (U4). This circuitry is programmed differently for con-trol and transmit applications.The GPS Timing module has hot standby capability. Cir-cuitry outside the FPGA provides this capability as well as I/O interfaces and a P hase-L ock-L oop (PLL). The PLL is used at the transmit site.Xilinx 3190A FPGA U4 is wired in master serial mode, which determines how programming is accomplished (Figures 4 & 5). These figures are included for those familiar with Xilinx technology and are not described within this document.At power up, following the release of the Reset/reprogram push-button switch S1, or following automatic detection of a Xilinx fault, data PROM U1 is read serially into U4. A watchdog function is performed by 555 timer, U5 in the Activity Detector circuit. This timer causes a reprogramming if the 9600 Hz selected clock is not provided by U4 (automatic Xilinx fault detection).Crystal B1 provides a 4.9152 MHz clock used internally by the Xilinx logic.This board operates from a single +5 volt supply. An on-board thermister fuse (F1) prevents module failure from causing this shelf supply to collapse.Input signals arrive as RS-422 levels and are converted to TTL logic levels by RS-485 receivers U9, U11, and U14. Input fault lines connect directly to U4, as they arrive at TTL logic levels. The outputs driving the GPS ReSync modules (located in the same shelf) are buffered with tri-state line drivers U7, U13 and U15. The RS-422 level outputs are generated using RS-485 drivers U16-U20. The tri-state controls on all these drivers are used by the hot standby circuitry to turn the output to high impedance when the module is in hot standby. The circuitry attached to RC_IN and RC_OUT provides operational/hot-standby selection; these leads tie through the backplane to the companion module.PLL U3 provides a de-jitter filter with zero phase shift on the recovered landline 9600 clock. This PLL is used only at the transmit site.CONTROL POINTThe major functions performed at the Control Point areshown in Figure 3. The GPS signal selection block selects a9600 clock and 1 pps signal from either of the redundant GPSlocked clock sources. The Clock Generator block generates a19200 Hz clock for use by the other blocks. The 300 HzGenerator generates the 300 Hz required by the ReSync bydividing the selected 9600 Hz by 32. It also ensures that thephase of this 300 Hz is proper relative to the F rame S ync L ine(FSL) input. The Composite Reference Generator takes theselected 9600 Hz clock and inserts tags at the proper times tocreate reference signals that contain:•Composite Reference 1 contains 9600 Hz clock plustags for 300 Hz and pseudo FSL.•Composite Reference 2 contains 9600 Hz clock plustags for 1 pps.These Composite References are extracted at the transmit site.The 300 Hz generator and the Composite Reference Generatorare implemented as state machines.TRANSMIT SITEThe major functions performed at the transmit site are shownin Figure 4. There are similarities to the Control Point. The clockgenerator generates a 19,200 Hz clock for internal use; the GPSsignal selection block selects the 1 pps and 9600 Hz clock fromthe two redundant GPS locked clock sources. In addition it alsoprovides for selection of the landline 9600 Hz in the unlikelyevent that both GPS sources are failed. The Signal Recoveryblock is the corresponding function of the Composite ReferenceGenerator at the Control Point. It extracts the 9600, 300 1 ppsand pseudo FSL from the reference signals. The 9600 Hzlandline is routed off the Xilinx IC (U4) to be filtered by thePLL and returned for use by the T1 delay module. The T1 delaymodule examines the selected GPS signals (1 pps and 9600) andcompares their phase to the corresponding landline signals. Ifcertain “hysterisis hurdles” are exceeded the number of T1cycles of delay desired are serially sent to the Intraplex MUXwhere the actual delay is accomplished. This Delay Controlblock and Signal Recovery block are implemented with statemachines.SELECTORC L O C KTO CPTC(RS-422)9.6 DATA ANDCLOCK TO MUX(RS-422)TO MUX(RS-422)(RS-422)GPS BGPS A9.6Figure 3 - Functions at the Control Point (CPTM)AE/LZB 117 1875 R1A3GPS AGPS BTO RESYNC MODULESTO MUX F R O M G P SA L A R M Figure 4 - Functions at the Transmit Site (TXTM)1U U 00 H zS L *d r i v eS L *t e s to m p R e f 1o m p R e f 2Figure 5 - Xilinx 3190A FPGA at the Control PointAE/LZB 117 1875 R1A4TEST AND TROUBLESHOOTINGThe GPS Timing operates in two functionally different applications. Some of the functionally is the same for both applications and some is complementary to the other applica-tion. The module contains a PROM which holds the configu-ration information for the application.The functions to be tested are described previously for the control point and transmit site application.Signal on test connector P2:Control PointPin 1 - Composite Ref. 1Pin 2 - 1pps GPS Pin 3 - nc Pin 4 - FSL*Pin 5 - Selected 9600 (ReSync)Pin 6 - 300 outPin 7 - Composite Ref. 2Pin 8 - nc Transmit SitePin 1 - T1 Delay Data Pin 2 - 1pps GPS Pin 3 - 1pps landline Pin 4 - FSL*Pin 5 - Selected 9600 (ReSync)Pin 6 - 300 out Pin 7 - ncPin 8 - 9600 PLL * Pseudo FSL.To test as a Control Point module:The module must be powered up and supplied with GPS signals (9600 Hz, 1pps and an FSL). The presence of the “selected” signals at all the proper outputs and of the gener-ated signals (300, Comp Ref. 1 and Comp Ref. 2) must be verified. This is done for GPS “A” and “B”. The generated Comp Ref. 1 and Comp Ref. 2 need to be checked to verify the “tag” is placed consistently following the corresponding event.With no signals present, the MINOR alarm goes active;the green activity (ACTV ) LED goes out and the red MAJOR alarm LED comes on.To test the Transmit Site:It is desirable to have an operational module in the Control Point mode to provide the Comp Ref. 1 and Comp Ref. 2signals. Signal selection is checked similar to that done at the Control Point with the additional fault mode of reverting to landline 9600 if neither GPS source is present. A second GPS source allows a precise time difference between the landline 1pps and the “direct” 1pps to test the T1 delay portion of the module. A known time difference is programmed onto the local GPS and the T1 delay output is examined to verify that a new delay value is sent. As there is no MUX (& T1 delay module) the correction will successively add to itself.U TS 2S 01p p s L LS E L 300T 1_C L O C A S M _C L C O M P _R E F 1Figure 6 - Xilinx 3190A FPGA at the Transmit SiteAE/LZB 117 1875 R1A5*COMPONENTS ADDED, DELETED OR CHANGED BY PRODUCTION CHANGESDATACLKRESET/OE(OE/RESET)CE G N DC E OVppVccU1PROMRON 107 786 CPTM (XC1765D)RON 107 787 TXTM(XC1765D)U2DUAL D FLIP/FLOPRYT 306 2003/C (74HC74)á = Transition from low to high levelQ0 = The level of Q after the previous clock pulse* = Nonstable, don’t preset when PR and CLR are set highX = Any input, including transition18916U3PHASE-LOCK-LOOPRYT 306 6075/C (74HCT4046)CONNECTIONS PARTS LIST IC DATAAE/LZB 117 1875 R1A 6Positive Logic: Y=A • BPositive Logic: Y=A+B26U4XILINXRYT 139 003/5C(3190A)V DSCHTHRESCONTGNDTRIG OUTU5555 TIMER RYT 108 6003/CG N DVcc 4B 4A 4Y 3B 3A 3Y2Y 2B2A 1Y1B1A U6QUAD NAND GATERYT 306 2001/C (74HC00)G NDVcc C4A4Y4C3A3Y3Y2A2C2Y1A1C1U7, U13, U15TRI-STATE BUFFER RYT 3066029/C (74HC125)Vcc 4Y 4B 4A 3Y 3B 3AG N D 2B2A 2Y 1B 1A 1Y U8QUAD NORGATERYT 306 2006/C (74HC020)IC DATAAE/LZB 117 1875 R1A7VccB4A4R 04E N 34R 03A3B3G N D B2A2R 02E N 12R 01A1B1U9, U11, U14RS-485 QUAD RECEIVER RYT 109 6079/2C (LTC489)Vcc DI 4DOA 4D O B 4E\DOB 3DOA 3DI 3G N DDI 2DOA 2DOB 2E DOB 1DOA 1DI 1U16 - U20RS-485 QUAD DRIVERRYT 109 6078/1C (LTC486)E EDOA1DOB1DOA2DOB2DOA3DOB3DOA4DOB4CONNECTIONSH: High Level L: Low Level X: Irrelevant Z:HighImpedance (Off)FUNCTION TABLEIC DATAAE/LZB 117 1875 R1A8OUTLINE DIAGRAM AE/LZB 117 1875 R1AOUTLINE DIAGRAM(1078 ROA 117 2260, Rev. B)9AE/LZB 117 1875 R1ASCHEMATIC DIAGRAMSCHEMATIC DIAGRAM(1911 ROA 117 2260, Sh. 1, Rev. B)SCHEMATIC DIAGRAM AE/LZB 117 1875 R1ASCHEMATIC DIAGRAM(1911 ROA 117 2260, Sh. 2, Rev. B)AE/LZB 117 1875 R1ASCHEMATIC DIAGRAMSCHEMATIC DIAGRAM(1911 ROA 117 2260, Sh. 3, Rev. B)AE/LZB 117 1875 R1A This page left blank intentionally。
Antenna Installation Guide
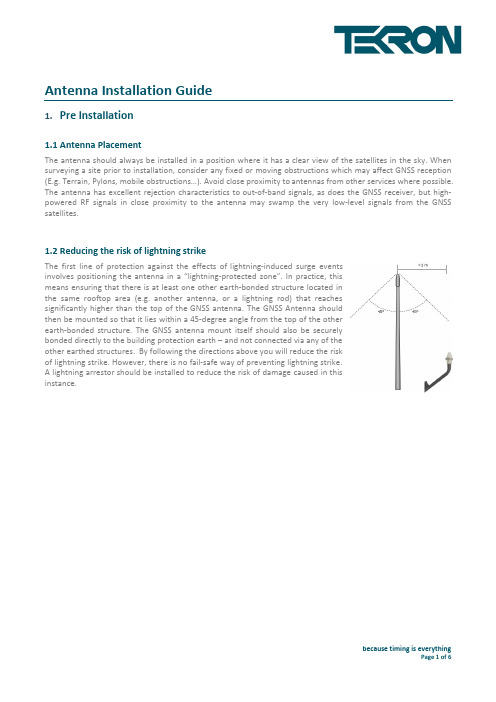
Antenna Installation Guide1.Pre Installation1.1Antenna PlacementThe antenna should always be installed in a position where it has a clear view of the satellites in the sky. When surveying a site prior to installation, consider any fixed or moving obstructions which may affect GNSS reception (E.g. Terrain, Pylons, mobile obstructions…). Avoid close proximity to antennas from other services where possible. The antenna has excellent rejection characteristics to out-of-band signals, as does the GNSS receiver, but high-powered RF signals in close proximity to the antenna may swamp the very low-level signals from the GNSS satellites.1.2Reducing the risk of lightning strikeThe first line of protection against the effects of lightning-induced surge eventsinvolves positioning the antenna in a “lightning-protected zone”. In practice,thismeans ensuring that there is at least one other earth-bonded structure located inthe same rooftop area (e.g. another antenna, or a lightning rod) that reachessignificantly higher than the top of the GNSS antenna. The GNSS Antenna shouldthen be mounted so that it lies within a 45-degree angle from the top of the otherearth-bonded structure. The GNSS antenna mount itself should also be securelybonded directly to the building protection earth – and not connected via any of theother earthed structures. By following the directions above you will reduce the riskof lightning strike. However, there is no fail-safe way of preventing lightning strike.A lightning arrestor should be installed to reduce the risk of damage caused in thisinstance.1.3Lightning ProtectionAt installations where lightning frequently occurs, it is prudent to install a lightning arrestor between the antennaand clock. Tekron's antenna lightning protection kit provides additional protection through the use of an impulsesuppressor. In the event of a lightning derived high voltage surge occurring, the impulse suppressor activates,short-circuiting the cable directly to earth.For the lightning protector to be effective, it must be firmly mounted to a conductive metal surface that is itselfbonded to the building protective earth. Ensure that a good electrical connection is made between the surgeprotector and the earthing system. All earthing connections should be as short as possible, should have no sharpbends or loops, and should use at least a 4mm2 stranded copper wire for earthing the lightning arrestor. The preferred mounting position is on the inside of the building’s exterior wall, adjacent to the antenna lead entrypoint.2.Antenna and Cable Installation2.1GNSS AntennaTekron’s standard shipping configuration includes an active GNSS antenna, specifically designed for industrial/static timing environments, together with a pipe-mounting plinth. The mechanical diagram below shows the antenna and pipe mounting plinth attached.The antenna pipe-mounting plinth is designed to fit over the top of a pipe like a capping. The mount has an internal diameter of 43mm, to fit a pipe with external diameter of between 40 and 42mm (1¼inch / 32mm nominal ID galvanized pipe). The top end of the pipe should be cut flat, so that the rubber gasket inside the antenna mount sits flush against it, forming an effective weather seal. The mount is fixed to the pipe with two stainless steel M8 hexagon- socket setscrews (supplied).2.2Antenna mounting bracketThe antenna pipe-mounting plinth is designed to fit over the top of a user-supplied pipe like a capping. The pipe should have an external diameter of between 40 and 42mm (1¼inch / 32mm nominal ID galvanized pipe). The top end of the pipe should be cut flat, so that the rubber gasket inside the antenna mount sits flush against it, forming an effective weather seal.Establish the mounting method for the pipe, such as strapping or bolting to a frame on the edge of the building, or strapping to an air conditioning exhaust or similar. The base of the pipe needs to be accessible for the cable entry, if this is not practical, then a hole or slot can be made in the side of the pipe to allow the cable to enter and be passed up to the top of the pipe.An adjustable antenna mounting bracket can be ordered from Tekron. See section 2.7 for specifications.2.3Antenna cableCalculate the cable length required between the antenna and GNSS Clock, allowing 5 –10% extra for contingencies.Tekron clocks can be ordered with 15, 30, or 60 meters of high performance RF cable factory-fitted with a TNC-type male connector at one end, and a SMA male connector at the other. The TNC-type connector mates with the connector on the antenna and provides a robust weather-resistant connection. The smaller SMA connector mates with the connector on the GNSS clock rear panel and is only fractionally larger in diameter than the cable itself; this facilitates installation in conduit and through small apertures.Custom lengths can be ordered upon request however additional costs may be incurred.Where antenna cable distance exceeds 60 meters, either lower loss (e.g. CNT-400) cable can be used or an in-line amplifier can be installed. Contact Tekron for further advice.2.4Antenna cable installationWhile the cable shielding is excellent, the cable should not be routed in close proximity to power cables or other RF cables carrying transmitter signals – in particular, parallel runs are to be avoided if possible. If such runs are absolutely unavoidable, a minimum separation of 300 mm may be used as a guideline.The GNSS receiver has excellent out of band rejection characteristics, as does the antenna itself. However, sound engineering practice should not rely on these factors alone to guarantee performance. Careful installation will enhance the long-term reliability and on-going stability of the clock.The absolute minimum bend radius for the antenna cable supplied is 40mm, but it is preferable to use a larger radius if possible. Caution should be taken at all times during the installation of the cable to avoid crushing or shorting the cable.2.5GNSS antenna installationFeed the antenna cable up the mounting bracket/ pipe from the bottom end, through the plinth, and connect directly to the TNC connector on the base of the antenna. It is advisable to wrap self-amalgamating tape around the connector to seal the connection and provide protection against moisture ingress.Fasten the antenna to the plinth using the four stainless screws supplied with the kit. The complete antenna assembly can then be placed on the mounting bracket/ pipe and secured by tightening the grub screws on the side of the plinth using the supplied Hex key.2.6Installing the lightning protection kit (when applicable)The lightning protector must be firmly mounted to a conductive metal surface that is itself bonded to the building protective earth. Ensure that a good electrical connection is made between the surge protector and the earthing system. All earthing connections should be as short as possible, should have no sharp bends or loops.The preferred mounting position is on the inside of the building’s exterior wall, adjacent to the antenna lead entry point.2.7Adjustable Antenna Mounting BracketThe steel adjustable antenna mounting bracket will assist in the dissipation of energy should the antenna be struck by lightning. The mounting bracket should be securely bonded directly to the building protection earth –and not connected via any of the other earthed structures.2.8Antenna Cable2.9Lightning Protection KitThe NexTek FPL series of protectors reduce lightning transients to very low voltage levels and pass dc through as well. Fine-protectors are usually necessary on sensitive receiver lines that must pass dc, or need protection Through Current 1 A。
林肯全球自动焊接系统NA-5 焊接机说明书

Publication E9.30 | Issue D a te 08/10 Web Update 01/12© Lincoln Global, Inc. All Rights Reserved.SUBMERGED ARC & AUTOMATIC EQUIPMENTProcessesFlux-Cored, Submerged Arc Product Number K356-2See back for complete specs Input Power115 VAC 50/60 Hz Wire Size Range.035 - 7/32 in. (0.9 - 5.6 mm)Wire Feed Speed Range 25-775 ipm(0.6-16.5 m/min)Net Weight/Dimensions (H x W x D)41 lbs. (18.6 kg)12.75 x 18.5 x 22.25 in.(324 x 470 x 565 mm)PH: +1.216-481-8100 • Shown: K356-2NA-5[ 2]|NA-51.Control Power Switch –Turns wire feeder input power on and off. Also serves as an emergency stop switch.2.Pilot Light –Shows when the electrode is "hot".3.Inch Pushbuttons –Feed electrode up and down when not welding.4.Start and Stop Pushbuttons –Control welding cycles.5.Meter Value Pushbutton –Monitor either the preset values or the actual values.6.Timer Control –For burnback and/or wire react time.7.Crater Module (optional) –Controls procedure for anadjustable period of time to regulate bead size or fill craters at the end of the weld.8.Weld Timer (optional) –Eliminates the need to press stop pushbutton.9.Lockable Cover –Lockout procedure controls when necessary.10.Digital Display –Monitor wire feed speed and voltage on separate meters.11.Start Module (optional) –Controls penetration, bead size, or other factors for an adjustable time at the start of the weld.12.WFS and Voltage Preset Controls –Preset wire feed speed and voltage prior to and during welding. These controlseliminate returning to the power source for routine procedure changes.13.Travel Switch –Controls the travel mechanism for automatic starting and stopping when welding, travel without welding during setup and travel off.12345678910111213K299 Reel and Mounting – Order separately.NA-5 Control K356-2DC Power Source –Constant Voltage type with on-off control of power source output.4 ft. (1.2 m) Motor Cord –Included with K346.4 ft. (1.2 m) Electrode CablesContact Nozzle (optional)K335-26 Extension – Motor, flux hopper and electrode cables. Optional when more than 4 ft. (1.2 m) is required.Work Cable – Two or more 4/0NA-5S and NA-5SFFor Submerged Arc WeldingTwo 4/0 electrode cables and the multi-conductor control cable.Flux Hopper –Included with K346.Solid Wire Straightener Head4 ft. (1.2 m) Flux Hopper Cord –Included with K346.REQUIRED EQUIPMENTSolenoid AssemblyValve to automatically control water flow when using cooling attachment on K148 contact assemblies. Can also be used to control gas. Order K223Starting or Crater Module Permits additional settings of wire feed speed and voltage for an adjustable period of time (10 seconds max). Can be used for either a starting procedure or a crater fill procedure. If both are required, two assemblies must be ordered.Order K334Remote Interface ModulePermits remote operation of theNA-5 Inch Up, Inch Down, Start andStop Functions by either of thefollowing user-supplied externalsignals and provides electricalisolation of the NA-5 control circuitryfrom these signals:- SwitchesMomentary closure of contactsrated for 24 volts,5 milliamperes, DC.-24 Volt SignalsMomentary application of 24volt ±10% AC or DC signalcapable of 5 milliamperessteady state. (.15 amp peakcapacitive in rush) per input.This module can be used withall codes of NA-5 Controls andreplaces the earlier K336Remote Pushbutton InterfaceModule, which provided for onlyexternal switch closure signals.Order K336Weld Timer ModulePermits setting of weld time for anadjustable period of time. Eliminatesneed to press stop pushbutton. Thetimer unit is adjustable from 0.00 -9.99 seconds.Order K337-10Control To Head ExtensionCable AssemblyThe standard head is equipped withcables which permit the head to bemounted up to four feet from thecontrols. "F" models, however, donot include electrode cables. Whenthe head is mounted further awayfrom the control, extension cableassemblies must be purchased. Forthe NA-5S head: Includes motor,tachometer, and flux valve leadextensions with polarized plugs andelectrode. 26 ft. length.Order K335-26Recommended for the NA-5N, andSF heads. It is the same as the K335without the flux valve lead extension.Available in 46 ft. lengths.Order K338-46Mounting KitFor use if the NA-5 control box is tobe mounted on the carriage.Order T14469SINGLE ELECTRODESubmerged Arc Contact NozzleAssembly for 3/32 in. (2.4 mm),1/8 in. (3.2 mm) and 5/32 in.(4.0 mm) electrodes.For 5/64 in. (2.0 mm), 3/16 in.(4.8 mm) or 7/32 in. (5.6 mm) sizes,order additional appropriate KP1962tips. Outer flux cone gives full fluxcoverage with minimumconsumption.(Rated up to 650 amps.)Order K231-1K231 nozzle tipsDesigned for long life.OrderKP1962-1B1for 1/8 in. (3.2mm) wireKP1962-2B1for 3/16 in. (4.8 mm) wireKP1962-3B1for 3/32 in. (2.4 mm) wireKP1962-4B1for 5/32 in. (4.0 mm) wireKP1962-5B1for 7/32 in. (5.6 mm) wireKP2082-2B1for 5/64 in. (2.0 mm) wireNarrow Gap Deep Grove NozzleFor single arc 3/32 in. (2.4 mm)diameter wire welding on thickwalled steel plate with nearlyparallel-sided, narrow gap jointpreparations.Order K386Contact Jaw AssemblySingle arc contact jawassembly for 1/8-7/32 in.(3.2-5.6 mm) diameter wire. Ruggedcontact jaws for maximum life atcurrents over 600 amps.Order K226RTWINARC®Tiny Twinarc®Wire StraightenerStraightens wire diameters .045 thru3/32 in. (1.2 thru 2.4 mm).Particularly valuable on longerelectrical stickout procedures.Order K281Tiny Twinarc®Feeds two 1/16, 5/64, or 3/32 in.(1.6, 2.0, or 2.4 mm) electrodes forhigh speed submerged arc welds onthin gauge (1.89 mm) to heavy plate.Includes contact nozzle, wire guides,drive rolls and guides, and a secondwire reel and mounting bracket.Order K129-1/16K129-5/64K129-3/32Large Wire Twinarc®Contact AssembliesFeeds two 5/64 in. (2.0 mm),3/32 in. (2.4 mm) or 1/8 in. (3.2 mm)wires for submerged arc weldingon "Fast-Fill" joints or hardfacingbeads.Order K225GENERAL OPTIONSConcentric FluxCone AssemblyFor use with K148B, Positive ContactNozzle Assembly. Gives concentricflux coverage around the electrode.Order K285Positive Contact AssemblyFor single arc welding at highcurrents (optional T12928 watercooling attachment recommendedwhen welding over 600 amps).Order K148A(for 3/32 to 1/8 in. wire)Order K148B(for 5/32 to 3/16 in. wire)ESO (Extended Stick-Out)ExtensionLinc-Fill long stickoutextension for K148A Single ArcPositive Contact Nozzle Assembly.Required for long stickout technique.Order K149-5/325 in. Nozzle ExtensionExtends the wire for subarc nozzlesby 5 inches [up to 1/4 in. (6.4 mm)diameter wire].Order KP2721-1Horizontal Head AdjusterProvides crank adjustment of headposition. Has 2 in. (51 mm)horizontal travel.Order K96Vertical Lift AdjusterProvides 4 in. (102 mm) hand crankadjustment of vertical head position.It also includes up to 3-3/4 in.(95.2 mm) in-and-out horizontaladjustment with stops that can bepreset for simple repetition of thesame adjustment.Order K29SpreadArc OscillatorOscillates head across the line oftravel. Calibrated dwell time andoscillation speed controls permit theSpreadArc to cover large areasquickly with smooth beads ofminimum admixture.Order K278-1TC-3 Self-PropelledTravel CarriageThe TC-3 travel carriage allows themounting of up to two feed heads/controllers and wire reels to a beamfor basic hard automationinstallations.Order K325 HCS(for 5-75 ipm)NA-5| [ 3]Automatic Flux Hopper Assembly Flux Hopper for MAXsa ™29 Heads (included standard on the MAXsa ™22 Heads). Order K219Wire Reel Assembly for 50-60 lb. CoilsAccommodates 50 lb. (22.7 kg) or 60 lb. (27.2 kg) coils of wire on automatic wire feeders. The unit includes a wire reel mountingspindle and braking system. Cannot be used with K2462-1.Order K299Tandem ReelsTwo Wire Reel Mounting for TC-3. Order K390Tandem Arc FrameworkProvides mountings with desired positioning adjustments for two standard Automatic Wire Feed Heads. Includes insulation and hardware to permit direct mounting to a high capacity TC-3 Carriage, or to the user's gantry or fixture for either direction of travel.Order K387Flux HopperTandem Arc Flux Hopper for K387 mountings. Order K389Wire Straightener (Subarc) up to 7/32 in. (5.6 mm)Includes a three roll wire straightener with adjustable pressure. (1 included with each tractor and MAXsa ™Feed Head.) Order K1733-5(1)For the K347 Head, order the K338 extension.(2)For gear ratios shown.C U S T O M E R A S S I S T A N C E P O L I C YThe business of The Lincoln Electric Company is manufacturing and selling high quality welding equipment, consumables, and cutting equipment. Our challenge is to meet the needs of our customers and to exceed their expectations. Onoccasion, purchasers may ask Lincoln Electric for information or advice about their use of our products. Our employees respond to inquiries to the best of their ability based on information provided to them by the customers and the knowledge they may have concerning the application. Our employees, however, are not in a position to verify the information provided or to evaluate the engineering requirements for the particular weldment. Accordingly, Lincoln Electric does not warrant or guarantee or assume any liability with respect to such information or advice. Moreover, the provision of such information or advice does not create, expand, or alter any warranty on our products. Any express or implied warranty that might arise from the information or advice, including any implied warranty of merchantability or any warranty of fitness for any customers’ particular purpose is specifically disclaimed.Lincoln Electric is a responsive manufacturer, but the selection and use of specific products sold by Lincoln Electric is solely within the control of, and remains the sole responsibility of the customer. Many variables beyond the control of Lincoln Electric affect the results obtained in applying these types of fabrication methods and service requirements.Subject to Change – This information is accurate to the best of our knowledge at the time of printing. Please refer to for any updated information.For best welding results with Lincoln Electric equipment, always use Lincoln Electric consumables. Visit for more details.。
Mini-Circuits M154107ZX47-55+ZX47-55LN+EDR-7798UED

NotesA. Performance and quality attributes and conditions not expressly stated in this specification document are intended to be excluded and do not form a part of this specification document.Operating Temperature -40°C to 85°C Storage Temperature -55°C to 100°C DC Power:Max. voltage 5.7V Max. current 120mA Internal Power Dissipation 0.73W Input Power +18dBmCASE STYLE: HN1173Notes:1. The negative slope indicates that Output Voltage decreases as Input Power increases. See "Output Voltage vs Input Power" graph below.2. Temperature sensor output provides a DC Output Voltage which increases linearly with temperature rise.Recommended minimum load for this port is 2 kΩ. 3. Recommended minimum load at DC out port is 100 Ω. See maximum ratings for no damage.Connectors ModelSMA ZX47-55-S+SMA ZX47-55LN-S+Maximum RatingsElectrical Specifications (T AMB = 25°C)• Low Noise (Output Ripple) for ZX47-55LN+, 20mVp-p Typ. @ 10MHz • High Dynamic Range • Wide Bandwidth• Single Supply Voltage: +5V • Stability Over Temperature • Built-in Temperature Sensor• Protected by US patent 6,790,049Features• RF/IF Power Measurements• Low Cost Power Monitoring System • RF Leakage Monitors• Fast feedback Levelling Circuits • RF Power Control• Receiver RF/IF Gain Control • RSSI measurementsApplicationsZX47-55+ ZX47-55LN+Power Detector50Ω, -55dBm to +10dBm, 10 to 8000 MHzCoaxialo 0.40.60.81.01.21.41.61.82.02.2-55-45-35-25-15-5515Input Power (dBm)O u t p u t V o l t a g e (V )Outline DrawingSimplified Functional DiagramRF IN 1DC OUT 5Vcc (+5V) 2TEMPERATURE SENSOR 4GROUND 3Coaxial ConnectionsFREQ.(MHz)DYNAMIC RANGE AT ±1dB ERROR (dBm)OUTPUT VOLT.RANGE (V)SLOPE(mV/dB)(Note 1)VSWR(:1)PULSE RESPONSETIME(nSec)Typ.TEMP.SENSOR OUTPUT SLOPE(mV/°C)(Note 2)DCOPERATING POWERVcc (Volts)Note 3Current (mA)Min.Max.Typ.Typ.Typ.Typ.ZX47-55+ZX47-55LN+Typ.Min.Typ.Max.Typ.Rise Fall Rise Fall101000-50 to +50.50 - 2.10-251.0540010800400 2.00 4.5 5.0 5.510010005000-55 to 0 1.4050006000-50 to +5 1.5060008000-45 to +101.30Permanent damage may occur if any of these limits are exceeded.TEMP SENSOROUTTEMPERATURE SENSOR A B C D E F G H J K 1.20 .69 .46 1.12 .04 .34 .46 .28 .33 .21 30.48 17.53 11.68 28.45 1.02 8.64 11.68 7.11 8.38 5.33 Outline Dimensions ( )inchmmL M N P Q R S T wt. .18 .14 .94 .50 .35 .18 .106 .60 grams 4.57 3.56 23.88 12.70 8.89 4.57 2.69 15.24 31.8.NotesA. Performance and quality attributes and conditions not expressly stated in this specification document are intended to be excluded and do not form a part of this specification document.0.50.70.91.1 1.3 1.5 1.71.92.1Output Voltage (V)-60-50-40-30-20-10010200.50.70.91.1 1.3 1.5 1.71.92.1Output Voltage (V)I n p u t P o w e r (d B m )-4-3-2-101234P .I n d e v . f r o m I d e a l (d B )Power Input Deviation from Ideal Vs -60-50-40-30-20-1001020I n p u t P o w e r (d B m )-4-3-2-101234P .I n d e v . f r o m I d e a l (d B )-30-20-10010203040010002000300040005000600070008000Frequency (MHz)O u t p u t V o l t a g e C h a n g e (%)-30-20-10010203040010002000300040005000600070008000Frequency (MHz)O u t p u t V o l t a g e C h a n g e (%)0.50.70.91.1 1.3 1.5 1.71.92.1Output Voltage (V)NotesA. Performance and quality attributes and conditions not expressly stated in this specification document are intended to be excluded and do not form a part of this specification document.-35-25-15-55-55-45-35-25-15-5515Input Power (dBm)S l o p e (m V /d B )-30-25-20-15-1010002000300040005000600070008000Frequency (MHz)S l o p e (m V /d B )-35-25-15-55-55-45-35-25-15-5515Input Power (dBm)S l o p e (m V /d B )-30-25-20-15-1010002000300040005000600070008000Frequency (MHz)S l o p e (m V /d B )-35-25-15-55-55-45-35-25-15-5515Input Power (dBm)S l o p e (m V /d B )-30-25-20-15-1010002000300040005000600070008000Frequency (MHz)S l o p e (m V /d B )NotesA. Performance and quality attributes and conditions not expressly stated in this specification document are intended to be excluded and do not form a part of this specification document.1.01.21.41.61.82.010002000300040005000600070008000Frequency (MHz)V S W R0.30.40.50.60.70.80.9-60-40-20020406080100Ambient Temperature (degC)S e n s o r V o l t a g e (V )-50-40-30-20-10010203040506070-55-45-35-25-15-5515Input Power (dBm)O u t p u t V o l t a g e C h a n g e (m V )。
小清新静谧中的流年工作总结模板

点击这里修改标题文本
添加文本信息
Lorem ipsum dolor sit amet, consectetuer adipiscing t.
添加文本信息
Lorem ipsum dolor sit amet, consectetuer adipiscing elit.
添加文本信息
Lorem ipsum dolor sit amet, consectetuer adipiscing elit.
点击修改标题文本
Click to modify the title text
Lorem ipsum dolor sit amet, consectetuer adipiscing elit. Maecenas porttitor congue massa. Fusce posuere, magna sed pulvinar ultricies, purus lectus malesuada libero, sit amet commodo magna eros quis urna.
03. 点击这里修改标题文本
Lorem ipsum dolor sit amet, consectetuer adipiscing elit.
04. 点击这里修改标题文本
Lorem ipsum dolor sit amet, consectetuer adipiscing elit.
PART ONE
点击这里修改标题文本
添加文本
Lorem ipsum dolor sit amet, consectetuer adipiscing elit. Maecenas porttitor congue massa.
添加文本
Lorem ipsum dolor sit amet, consectetuer adipiscing elit. Maecenas porttitor congue massa.
timingclosure
Encounter™ Timing Closure Guide Product Version 4.1June 20042002-2004 Cadence Design Systems, Inc. All rights reserved.Printed in the United States of America.Cadence Design Systems, Inc., 555 River Oaks Parkway, San Jose, CA 95134, USATrademarks:Trademarks and service marks of Cadence Design Systems, Inc. (Cadence) contained in this document are attributed to Cadence with the appropriate symbol. For queries regarding Cadence’s trademarks, contact the corporate legal department at the address shown above or call 800.862.4522.All other trademarks are the property of their respective holders.Restricted Print Permission:This publication is protected by copyright and any unauthorized use of this publication may violate copyright, trademark, and other laws. Except as specified in this permission statement, this publication may not be copied, reproduced, modified, published, uploaded, posted, transmitted,or distributed in any way,without prior written permission from Cadence.This statement grants you permission to print one (1) hard copy of this publication subject to the following conditions:1.The publication may be used solely for personal, informational, and noncommercial purposes;2.The publication may not be modified in any way;3.Any copy of the publication or portion thereof must include all original copyright,trademark,and otherproprietary notices and this permission statement; and4.Cadence reserves the right to revoke this authorization at any time, and any such use shall bediscontinued immediately upon written notice from Cadence.Disclaimer: Information in this publication is subject to change without notice and does not represent a commitment on the part of Cadence. The information contained herein is the proprietary and confidential information of Cadence or its licensors, and is supplied subject to, and may be used only by Cadence’s customer in accordance with, a written agreement between Cadence and its customer. Except as may be explicitly set forth in such agreement, Cadence does not make, and expressly disclaims, any representations or warranties as to the completeness,accuracy or usefulness of the information contained in this document. Cadence does not warrant that use of such information will not infringe any third party rights,nor does Cadence assume any liability for damages or costs of any kind that may result from use of such information.Restricted Rights:Use,duplication,or disclosure by the Government is subject to restrictions as set forth in FAR52.227-14 and DFAR252.227-7013 et seq. or its successor.ContentsAbout This Guide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3 Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3 How This Manual Is Organized . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3 Conventions Used in This Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4 Related Documents. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51Timing Closure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 Recommended Timing Closure Flow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8 Data Preparation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9 Validating the Netlist and Libraries. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9 Checking Timing Constraint Syntax. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10 Validating Timing Constraints. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11 Resolving Footprint Inconsistencies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11 Validating the Floorplan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12 Generating the Capacitance T able File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12 Pre-Placement Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14 Optimizing the Netlist. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14 Netlist-to-Netlist Optimization Flow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 Guidelines for using N2N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15 Recommended Use of the runN2NOpt Command. . . . . . . . . . . . . . . . . . . . . . . . . . .16 Floorplanning and Initial Placement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 Ensuring Routability. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17 Timing-Driven Placement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19 T roubleshooting Timing and Congestion Problems . . . . . . . . . . . . . . . . . . . . . . . . . .20 Pre-CTS Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22 Guidelines for Pre-CTS Optimization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22 Pre-CTS optDesign Command Sequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23 Improving Pre-CTS Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24 Clock Tree Synthesis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26 Creating the Clock Specification File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26Synthesizing the Clock Tree. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27 Optimizing the Clock Tree. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28 CTS Constraint File Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29 Sample CTS Script. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31 Post-CTS Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32 Post-CTS Optimization Command Sequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32 Checking Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34 Detailed Routing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35 Improving Timing during Routing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35 Example Routing Commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35 Timing Check . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35 Post-Route Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36 Fixing Timing and Design Rule Violations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36 Resolving Signal Integrity Issues. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37 Modifying the Default Operation Modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39 Timing Sign Off . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40ATiming Closure Script . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41 Timing Closure Script . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42BTiming Closure Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47 generateRCFactor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48 optDesign. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51 runN2NOpt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58 Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61 timeDesign. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..62About This GuideThe Cadence®Encounter™family of products provides an integrated solution for an RTL-to-GDSII designflow.This document addresses issues related to timing closure for challenging designs. It presents a recommended task flow and provides tips on how to resolve or avoid common timing closure problems typically found in a design.AudienceThis manual is written for experienced designers of digital integrated circuits.Such designers must be familiar with design planning, placement and routing, block implementation, chip assembly, and design verification. Designers must also have a solid understanding of UNIX and Tcl/Tk programming.This manual also assumes that you are familiar with the operation of Cadence Encounter design tools.Before starting a new project,you should be familiar with the commands and options used in the tools and have a basic understanding about how the Encounter software interprets LEF constructs and timing constraints.How This Manual Is OrganizedThis manual contains one main chapter,which is organized to correspond to the designflow for closing timing on a design. There are also 2 appendices:Timing Closure Script Provides the entire timing closure script for reference. Timing Closure Commands Contains the command syntax and parameterdescriptions for the generateRCFactor,optDesign,runN2NOpt, and timeDesigncommands.Conventions Used in This ManualThis section describes the typographic and syntax conventions used in this manual.text Indicates text that you must type exactly as shown. Forexample:analyze_connectivity -analyze alltext Indicates information for which you must substitute a nameor value.In the following example,you must substitute the name of aspecific file for configfile:wroute -filename configfiletext Indicates the following:s T ext found in the graphical user interface (GUI),including form names, button labels, and field namess T erms that are new to the manual, are the subject ofdiscussion, or need special emphasiss Titles of manuals[ ]Indicates optional arguments.In the following example, you can specify none, one, orboth of the bracketed arguments:command [-arg1] [arg2value][ | ]Indicates an optional choice from a mutually exclusive list.In the following example, you can specify any of thearguments or none of the arguments, but you cannotspecify more than one:command [arg1 | arg2 | arg3 | arg4]{ | }Indicates a required choice from a mutually exclusive list.In the following example, you must specify one, and onlyone, of the arguments:command {arg1 | arg2 | arg3}Related DocumentsFor more information about the Encounter family of products, see the following documents.Y ou can access these and other Cadence documents with the CDSDoc online documentation system.s Encounter User GuideDescribes how to use the various features and tools of the Encounter family of products.s Encounter Menu ReferenceProvides a detailed reference of all the menu options and forms of the Encounter user interface.s Encounter Database Access Command Reference{[ ] [ ]}Indicates a required choice of one or more items in a list.In the following example, you must choose one argumentfrom the list, but you can choose more than one:command {[arg1] [arg2] [arg3]}{ }Indicates curly braces that must be entered with thecommand syntax.In the following example, you must type the curly braces:command arg1{x y }...Indicates that you can repeat the previous argument....Indicates an omission in an example of computer output or input.Command – SubcommandIndicates a command sequence,which shows the order inwhich you choose commands and subcommands from theGUI menu.In the following example, you choose Floorplan from themenu,then Power Planning from the submenu,and thenAdd Rings from the displayed list:Floorplan – Power Planning – Add RingsThis sequence opens the Add Rings form.Lists all of the Encounter database access commands and provides a brief description of syntax and usage.s Encounter Known Problems and SolutionsDescribes important Product Change Requests (PCRs) for the Encounter family of products, including solutions for working around known problems.s Encounter Library Development GuideDescribes library development guidelines for the independent tools that make up the Encounter family of products.s Encounter Text Command ReferenceDescribes the Encounter text commands, including syntax and examples.s What’s New in EncounterProvides information about new and changed features in this release of the Encounter family of products.s README fileContains installation,compatibility,and other prerequisite information,including a list of product change requests(PCRs)that were resolved in this release.Y ou can read thisfile online at .For a complete list of documents provided with this release, see the CDSDoc library.5/24/041 Timing ClosureAchieving timing closure on a design is the process of creating a design implementation that is free from logical, physical, and design rule violations and meets or exceeds the timing specifications for the design.For a production chip,all physical effects,such as metalfill and coupling, must be taken into account before you can confirm that timing closure has been achieved.Timing ClosureRecommended Timing Closure FlowThe followingfigure shows the recommended timing closureflow with the steps used during the prototyping and sign-off design stages of the flow. The continuous convergence methodology provides increasing accuracy as the design progresses through the flow. The sign-off processes provide the greatest accuracy,but require longer run times than the earlier, prototyping processes.Data PreparationPre-Placement Optimization Floorplanning and Initial Placement Pre-CTS OptimizationClock T ree SynthesisPost-CTS OptimizationDetailed RoutingPost-Route Optimization RCRoute STA Default Detailed Full Trial Route Static TimingAnalysisTiming Sign OffExtractionData Preparation When you start a new project,you first have to determine whether thedesign data is valid and consistent. Unless the data has already beenchecked and validated, you should assume that there areinconsistencies and other problems that must be resolved beforeproceeding.The goals of data preparation include:s Confirming that the Encountersystem has a complete and consistent set of design data (all library views and versions mustbe consistent).See “Validating the Netlist and Libraries”on page 9.s Ensuring that all tools in the flow interpret the timing constraints consistently. See“Validating Timing Constraints” on page 11.s Validating the floorplan (if one is provided). See “Validating the Floorplan” on page 12.s Making sure that the footprint file is correct. See “Resolving Footprint Inconsistencies”on page 11.s Creating a capacitance table file that matches the process technology.“Generating the Capacitance T able File” on page 12.sCorrelating parasitics among the prototyping and sign-off extraction tools. See“Generating the Capacitance Table File” on page 12.It is helpful to keep a log of all your runs including notes of your expectations for the run and how you resolved any problems.Inserting comments in script files help you track changes you make as you refine the process.Validating the Netlist and LibrariesY ou must have a complete set of data to validate the libraries and netlist. The Encounter configuration file specifies all of the library and design data loaded into memory.The libraries and netlist should have no errors or warnings.s Library mismatchesThe loadConfig command displays warning and error messages about mismatches between timing and physical libraries.Y ou may have missed loading a LEF file,or there is an inconsistency between the timing libraries and physical libraries specified in the configuration file.DataPrep PPO FP/IP Pre-CTS CTS Route PROTiming Sign Off Post-CTS Cs Nets should be optimized with assign statementsCheck the Verilog netlist for assign statements.If assign statements exist,use one of the following procedures to enable optimization to work on those nets(they are equivalent):❑Use setDoAssign on before loading the design data.❑Use set rda_Input(assign_buffer) {1} in the configuration file.s Blackboxes in the netlistA blackbox is an instance declaration in the netlist for which no module or macrodefinition is found. Unless your design is being done using a blackbox style offloorplanning, there should be no blackboxes in the design. If there are blackboxesreported, be sure to load the Verilog file that defines the logic module, and make sure you include the LEF file that defines the macro being referenced in the netlist. Checking Timing Constraint SyntaxIn addition to checking the libraries, the loadConfig command also checks the syntax of timing constraints. After running loadConfig, check for the following problems:s Unsupported constraintsThe Encounter software may not support the SDC constraints being used with thedesign,or the constraints may not match the netlist.If the constraints are not supported, they may need to be re-expressed(if possible)in constraints that the Encounter software does support.s Ignored timing constraintsSyntax errors can cause the tools to ignore certain constraints resulting in themisinterpretation of important timing considerations.Check for the number of constraints that are accepted or skipped. The tool displays messages similar to the following: Reading timing constraint file ‘temp.sdc’ ...*info: create_generated_clock : 2 accepted, 1 skipped!*info: create_clock : 1 accepted, 0 skipped!*info: refer to log file for more detail on skipped constraints if any The encounter.log file contains more information about each constraint that was skipped. For example:Related message on constraint file temp.sdc:**WARN[line 3]: -add and -master_clock options must be used together increate_generated_clock statement**WARN[line 3]: skip “create_generated_clockThe following are possible causes for ignored constraints.❑ A design object is not found.If the constraints refer to pins, cells, or nets that are not found in the netlist, thenconsider the following possible causes:❍There could be a naming convention problem in the constraint file.❍The netlist and constraints are out of sync,and a new set of constraints and/ora new netlist needs to be obtained.❑An incorrect type of object is being passed to a constraint.❑An option is being used incorrectly or an unknown option is used.❑Illegal endpoints are used in assertions.Use the primary IOs (top-level ports, CK or D register pin) to define starting andendpoints of set_false_path and set_multicycle_path.A combinatorial pinor a Q register pin is not valid.Validating Timing ConstraintsAs described in the previous section, the loadConfig command checks the syntax of specified timing constraints.However,it is also important to ensure that the timing constraints are valid for the design.A goodfirst-pass method is to check the zero wire-load model timing. T o validate timing constraints, use the command:timeDesign -prePlace -outDir preplaceTimingReportsThis command generates a quick timing report using zero net delay and provides a first indication, before placement and routing, of how much effort will be required to close timing and whether the timing constraints are valid for the design.Resolving Footprint InconsistenciesInconsistencies in how footprints are defined in the footprint file can lead to sub-optimal or erroneous optimization results. Make sure that all cells for a given footprint are functionally equivalent and are the proper set for the step being performed. For example, clock buffers should generally not be used for optimization.s Create and load footprints correctly.❑Load the data and use the reportFootPrint file_name command to createa footprints file.❑Check the footprint name for buffers, inverters, and delay cells.❑Update your configuration file with the footprint information for buffer, inverter, and delay cells. Y ou can use the commands setInvFootprint,setDelayFootprint,and setBufFootprint,or you can edit the configurationfiles and add the linesset rda_input(ui_buf_footprint) {xxx}set rda_input(ui_delay_footprint) {xxx}set rda_input(ui_inv_footprint) {xxx}❑Use the loadFootPrint-infile file_name command to load the footprints file.❑Use the command checkFootPrint after loadFootPrint as an essential check before optimization.s Make sure that library cells have the same names as their footprint definitions.s Make sure that all buffer cells for optimization are defined in the footprint file. Validating the FloorplanA congested or unroutable design at this stage will not get better during optimization. If afloorplan is provided, you should be able to:s Place the design in the floorplan without issuess Create a routable placementPerform a visual inspection of thefloorplan to make sure there are no overlapping I/O blocks. Generating the Capacitance Table FileThe generateCapTbl command reads a detailed process description file in Interconnect T echnology(ICT)format and a LEF technologyfile,and outputs a capacitance tablefile.The Interconnect T echnology (ICT) file describes the detailed process information for a given technology(layer thicknesses,materials,profiles,dielectric constants,and so forth).Any non-default rules for the design should be defined in the LEF file you are using.The capacitance table file consists of two parts:s Basic Capacitance T ableProvides a table of spacing versus capacitance information for each layer.s Extended Capacitance T ableProvides encoded extraction patterns that are derived using a 3D field solver which provides much greater accuracy during detailed extraction. A capacitance table file (basic or extended)is process-specific and not design dependent,so it only needs to be created once per technology.If a capacitance table already exists for your process,use it and do not recreate it.The following example shows how to generate an extended capacitance table using the default field solver (Coyote).generateCapTbl-lef tech.lef-ict process.ict-coyote-output process.xCapTblDetermining and Setting the Scaling FactorsT o obtain the parasitics measurements to determine the appropriate scaling factors,use the generateRCFactor command.This command sets the capacitance factors by comparing FE extraction with the results of either Fire & Ice extraction or a SPEF file.For more information, see generateRCFactor on page48.Pre-Placement Optimization The goals of pre-placement optimization is to optimize the netlist tosImprove the initial netlist sReduce congestion sReduce area s Improve timingIn some situations, the input netlist (typically from a poor RTLsynthesis)is not a good candidate for placement since it might containbuffer trees or logic that is poorly structured for timing closure.In mostcases,high-fanout nets should be buffered after placement.It is more reliable to allow buffer insertion algorithms to build and place buffer trees rather than to rely on the placer to put previously inserted trees in optimal locations. Additionally, having buffer trees in the initial netlist can adversely affect the initial placement.Because of these effects,it can be advantageous to run pre-placement optimization or simple buffer and double-inverter removal (area reclamation) prior to initial placement. This can be accomplished by using the reclaimArea ,removeBufferTree ,and removeClockTree commands.For designs where the logical structure of the critical paths or high congestion are the sources of closure problems, restructuring or remapping the elements on the paths (or relatedportions of the design) can provide better timing results. This is done by running netlist-to-netlist optimization using the runN2NOpt command on the initial netlist. Additionalrestructuring can be performed later in the flow using the Encounter optimization commands.Optimizing the NetlistThe initial netlist is optimized at the beginning stage of a design implementation. The runN2NOpt command compares the timing correlation between RTL Compiler andEncounter.If the timing correlates,the netlist is restructured to simplify the gates in the critical paths. This restructuring allows for easier placement and optimization later in the flow.If significant timing correlation issues are found, the command does not modify the initial netlist and simply ends its operation.The highlights of netlist-to-netlist optimization include:s Access to RTL Compiler from EncounterDataPrep PPO FP/IP Pre-CTS CTS Route PRO Timing Sign Off Post-CTS Cs Different degrees of synthesis transformation depending on the specified effort: Netlist-to-netlist performs either low or high efforts to make small or large changes on the netlist with faster or slower run times.s Gate-level Verilog inputs with timing constraints and timing libraries in .lib format s Verilog output which is automatically loaded back into Encounters The detection of wireload definition and selection in the timing library and the generation of custom wireload as neededsAutomatic and customized modes for novice and expert RC users Netlist-to-Netlist Optimization FlowThe following figure shows the data flow for netlist-to-netlist optimization.Guidelines for using N2NUse the following guidelines when you use the runN2NOpt command for pre-placement optimization:s In general, try netlist optimization on designs with:❑High-utilization ❑Very bad slack (less than -4 ns) after pre-CTS timing optimizationGate-Level Verilog TimingLibraries Timing ConstraintDesign ImportN2N OptimizationFloorplan, P&R, OptimizationOptimized NetlistSoCE❑Long logic-dominated worst slackss Always check for ST A correlation first (ec::precheckTiming). Start with SDC error and warning messages.s Avoid running N2N on an RTL Compiler netlist,timing-closed designs,and designs with bad ST A correlation.s Either remove dangling instances such as spare cells or use an explicit “preserve.”s Explore RC path_adjust for a design with worst path timing correlation problems. Recommended Use of the runN2NOpt CommandThe following example shows the recommended use of the runN2NOpt command.runN2NOpt \-effort high \-inDir n2n.input \-outDir n2n.output \-report all \-saveToDesignName n2n.encFor the complete syntax and descriptions of parameters, see runN2NOpt on page58.。
电子计时器功能概述及其操作方法说明书

Switches&PilotLightsDisplayLightsRelays&SocketsTerminalBlocksCircuitBreakersT iming Diagrams OverviewGuide to Reading Timing Function DiagramsPower PowerStart Input Start Input1. If power is disconnected during actual timing, most electronic timers reset to thepreset time, ready for the re-application of supply voltage(except for GT3F “true OFF Delay”).2. NO = Normally open.3. NC = Normally closed.Timing Function Diagrams OverviewON-Delay 1 (power start)When voltage is applied to the coil, the relay contacts remain in the off stateand the set time begins. When the set time has elapsed, the relay contactstransfer to the on state. The contacts remain in the on state until the timer isreset. The timer is reset by removing the coil voltage. Applicable models: RTE-P(B)1, GT3A-1, -2, -3, GT3D-1, -2, -3, -4, and GE1A.PowerOutputInterval 1 (power start)When voltage is applied to the coil, the relay contacts transfer immediately tothe on state and the set time begins. When the set time has elapsed, the relaycontacts transfer to the off state. The contacts remain in the off state until thetimer is reset. The timer is reset by removing the coil voltage. Applicable models:RTE-P(B)1, GT3A-1, -2, -3, and GT3D-1, -2, -3, -4.PowerOutputON-Delay 2 (signal start)Voltage is applied to the coil at all times. When a start input is supplied, therelay contacts remain in the off state and the set time begins. When the settime has elapsed, the relay contacts transfer to the on state. The contactsremain in the on state until the timer is reset. The timer is reset by applying areset input or by removing the coil voltage. Applicable models: GT3A-4, GT3D-4and RTE-P(B) 2.Start InputOutputInterval 2 (signal start)Voltage is applied to the coil at all times. When a start signal is supplied, therelay contacts transfer immediately to the on state and the set time begins.When the set time has elapsed, the relay contacts transfer to the off state. Thecontacts remain in the off state until the timer is reset. The timer is reset by ap-plying a reset input or by removing the coil voltage. Applicable models: GT3A-5and GT3D-4.Start InputOutput1. T = set time, T’ = shorter than set time, Ts = one shot output time2. For more detailed timing diagrams, see specifi cations for individual timer models.Switches & Pilot LightsDisplay LightsRelays & SocketsTerminal BlocksCircuit BreakersCycle 1 (power start, OFF fi rst)When voltage is applied to the coil, the contacts remain in the off state and the set time begins. At the end of the set time, the contacts transfer to the on state and remain in the on state until the set time elapses. The timer cycles between the two states until power is removed from the coil. Removing the coil voltage resets the timer. The set time for both the on state and the off state is thesame. Applicable models: GT3A-1, -2, -3, GT3D-1, -2, -3, -4 and RTE-P(B)1.PowerOutputCycle 3 (power start, ON fi rst)When voltage is applied to the coil, the contacts immediately transfer to the on state and the set time begins. At the end of the set time, the contacts transfer to the off state and remain in the off state until the set time elapses. The timer cycles between the two states until power is removed from the coil. Removing the coil voltage resets the timer. The set time for both the off state and the on state is the same. Applicable models: GT3A-1, -2, -3, GT3D-1, -2, -3, -4 andRTE-P(B)1.PowerOutputOne Shot 1 (signal start, retriggerable)Voltage is applied to the coil at all times. When a start signal is supplied, the contacts immediately transfer to the on state and the set time begins. If another start signal is supplied (before set time has elapsed) the set time restarts, as the contacts remain in the on state . Successive pulses at a frequency greater than the set time will cause the contacts to remain in the “On state ” indefi nitely. When the set time has elapsed the contacts transfer back to the off state . The contacts remain in the off state until the next start signal is supplied (no reset is necessary). The timer can be reset by application of a reset input orby removing coil voltage. Applicable models: GT3A-6 and GT3D-4.Start InputOutputCycle 2 (signal start, OFF fi rst)Voltage is applied to the coil at all times. When a start signal is supplied, the relay contacts remain in the off state and the set time begins. At the end of the set time, the contacts transfer to the on state and remain in the on state until the set time elapses. The timer cycles between the two states until the timer is reset. The set time for both the on state and the off state are the same. The timer is reset by application of a reset input or by removing coil voltage. Ap-plicable models: GT3A-4, GT3D-4 and RTE-P(B) 2.Start InputOutputOne Shot Cycle (signal start)Voltage is applied to the coil at all times. When a start signal is supplied, the con-tacts remain in the off state and the set time begins. At the end of the set time, the contacts transfer to the on state and remain in the on state for the set time. After the set time has elapsed, the contacts return to the off state . The contacts remain in the off state until the timer is reset. The timer is reset by application ofa reset input or by removing coil voltage. Applicable models: GT3A-5 and GT3D-4.Start InputOutputOne Shot 2 (signal start)Voltage is applied to the coil at all times. When a start signal is supplied, the contacts immediately transfer to the on state and the set time begins. If another start signal is supplied (before set time has elapsed), the set time will not be affected. When the set time has elapsed, the contacts transfer back to the off state . The contacts remain in the off state until the next start signal is supplied (no reset is necessary). The timer can be reset by application of a reset input orby removing coil voltage. Applicable models: GT3A-6, GT3D-4, and RTE-P(B)2.Start InputOutput1. T = set time, T’ = shorter than set time, Ts = one shot output time2. For more detailed timing diagrams, see specifi cations for individual timer models.Switches&PilotLightsDisplayLightsRelays&SocketsTerminalBlocksCircuitBreakersSignal ON/OFF-Delay 1Voltage is supplied to the coil at all times. When a maintained start signal issupplied, the contacts immediately transfer to the on state and the set time be-gins. When the set time has elapsed, the contacts transfer to the off state. Thecontacts remain in the off state until the start signal is removed. The contactstransfer back to the on state and remain in the on state for the set time. Whenthe set time has elapsed, the contacts transfer to the off state and remain in theoff state until the start signal is supplied again (no reset is necessary). The timeris reset by application of a reset input or by removing coil voltage. Applicablemodels: GT3A-4, GT3D-4 and RTE-R(B)2.Start InputOutputSignal ON/OFF-Delay 3Voltage is supplied to the coil at all times. When a momentary start signal issupplied, the contacts remain in the off state and the set time begins. When theset time has elapsed, the contacts transfer to the on state. The contacts remainin the on state until another momentary input is supplied. The contacts thenremain in the on state for the set time. When the set time has elapsed, the con-tacts transfer to the off state and remain in the off state until the start signal issupplied again (no reset is necessary). The timer is reset by application of a resetinput or by removing coil voltage. Applicable models: GT3A-6 and GT3D-4.Start InputOutputOne Shot ON-Delay (signal start)When voltage is applied to the coil, the preset time is initiated and the contactsremain in the off state for the preset time. Following the preset time, thecontacts transfer to the on state, and remain in the on state until the start inputis supplied. Following the start input, the contacts transfer to the off state forthe preset time. After the preset time has elapsed, the contacts transfer back tothe on state and remain there until either the next start input is supplied or thetimer is reset. The timer can be reset by either a reset input or removal of thecoil voltage. Applicable models: GT3A-6 and GT3D-4.Start InputOutputSignal ON/OFF-Delay 2Voltage is supplied to the coil at all times. When a maintained start signal issupplied, the contacts remain in the off state and the set time begins. Whenthe set time has elapsed, the contacts transfer to the on state. The contactsremain in the on state until the start signal is removed. Once the start signalis removed, the contacts remain in the on state and the set time begins again.Once the set time has elapsed, the contacts transfer back to the off state. Thetimer is ready for the next start signal. The timer is reset by the application of areset signal or removal of power. Applicable models: GT3A-5 and GT3D-4.Start InputOutputSignal OFF-Delay 1Voltage is applied to the coil at all times. When a start signal is supplied, thecontacts immediately transfer to the on state. The set time begins when thestart signal is removed. When the set time has elapsed, the contacts transferto the off state. The contacts remain in the off state until the next start signal issupplied (no reset is necessary). The timer can be reset by application of a resetinput or by removing coil voltage. Applicable models: RTE-P(B)2, GT3A-4, andGT3D-4.Start InputOutputSignal OFF-Delay 2Voltage is applied to the coil at all times. When a maintained start signal is sup-plied, the contacts remain in the off state. When the “start signal is removed”,the contacts transfer to the “On state” and the set time begins. When the settime has elapsed, the contacts transfer back to the off state. They remain inthe off state until the next start signal is supplied (no reset is necessary. Thetimer can be reset by application of a reset input or by removing coil voltage.Applicable models: GT3A-5 and GT3D-4.Start InputOutput1. T = set time, T’ = shorter than set time, Ts = one shot output time2. For more detailed timing diagrams, see specifi cations for individual timer models.Switches & Pilot LightsDisplay LightsRelays & SocketsTerminal BlocksCircuit BreakersON-Delay One-Shot Output 1 (signal start)Voltage is applied to the coil at all times. When a momentary start signal is sup-plied, the contacts remain in the off state and the preset time begins. Following the preset time, the contacts transfer to the on state and remain in the on statethere until timer is reset. The timer can be reset by a reset input, removal of the coil voltage or removal of start input. Applicable model: GT3D-8.Start InputOutputSequential Start (power start)When voltage is applied to the coil, both contacts remain in the OFF state and the set time, T1, begins. When T1 has elapsed, output 1 comes on and T2 begins. When T2 has elapsed, output 2 comes on. Both outputs remain on until power is removed from the coil. Applicable model: GT3W-A.Start InputOutputCycle One-Shot Output (signal start)Voltage is applied to the coil at all times. When a momentary start signal is sup-plied, the contacts remain in the off state and the preset time begins. Following the preset time, the contacts transfer to the on state . The contacts remain in the on state for the one-shot preset time. After the one-shot preset time has elapsed, the contacts transfer back to the off state . The contacts remain in the off state for the preset time minus the one-shot preset time. The timer cycles between on and off states until the timer is reset by a reset input or removal ofthe coil voltage. Applicable model: GT3D-8.Start InputOutputTrue Power-OFF DelayWhen voltage is applied, output comes on immediately; when voltage is removed from the coil, the timer begins timing (internal capacitors power the timing circuit). When time has expired, contacts transfer back to the OFF state. If power is reapplied before the elapsed time has expired, the timing function will reset back to the starting point. Applicable models: GT3F-1, 2.Start InputOutputRecycler Outputs (power start)When voltage is applied to the coil, both contacts remain in the off state and time T1 begins. When T1 has elapsed, both contacts transfer to the ON state and T2 begins. When T2 has elapsed, both contacts transfer back to the OFF state and T1 begins again. The cycle continues until power is removed, at whichtime both contacts transfer back to the OFF state. Applicable model: GT3W-A.Start InputOutput1. T = set time, T’ = shorter than set time, Ts = one shot output time2. For more detailed timing diagrams, see specifi cations for individual timer models.。
timing library结构 -回复

timing library结构-回复Timing library structure refers to the organization and design of a timing library, which is a software module used to measure and manipulate time in computer programs. In this article, we will discuss the various components and functionalities of a timing library structure, providing a step-by-step explanation of each element.1. Introduction to Timing LibrariesTiming libraries are essential for accurately measuring and controlling time-related events in computer programs. They provide functions and data structures that enable developers to monitor and manipulate time-based operations, such as measuring execution time, implementing timeouts, and scheduling periodic tasks.2. Core Components of Timing Librariesa. Timer: The timer component is responsible for measuring the elapsed time. It includes functions to start, stop, and query the current time. Timers can be classified into two categories: system timers, which rely on the underlying operating system, andhigh-resolution timers, which provide more precise measurements.b. Timer Event: Timer events are triggered when a specific amount of time has elapsed. They are used for scheduling actions or tasks at regular intervals. A timer event handler executes the specified action when the timer expires.c. Time Conversion: Timing libraries often provide functions to convert time between different formats, such as from ticks to milliseconds or from seconds to minutes. These conversion functions facilitate seamless integration with other parts of the program and ensure consistent time representations.d. Sleep: The sleep component allows the program to pause execution for a specified period. It is useful for implementing delays or controlling the rate of execution. Sleep functions typically block the program until the desired time has passed.e. Timing Analysis: Advanced timing libraries may include features for analyzing the performance of a program. This includes measuring execution time, identifying bottlenecks, and profiling the code to optimize performance.3. Timing Library Structure in Detaila. Header Files: The timing library usually consists of several header files. These files contain function prototypes, definitions of data structures, and constant values used by the library. Including the appropriate header files is crucial for accessing the timing library's functionalities.b. Source Files: The source files contain the actual implementation of the timing library. They consist of the code that defines the behavior of the timer, timer events, time conversion functions, sleep routines, and other components. These files are compiled to create the library object file.c. API Documentation: Well-designed timing libraries include comprehensive documentation explaining the usage and behavior of each function and component. This documentation provides developers with the necessary information to integrate the library into their programs effectively.d. Examples and Tutorials: To further assist developers, timing libraries often include examples and tutorials. These resources demonstrate the usage of different library functions and providestep-by-step instructions on how to integrate the library into a specific programming language or framework.e. Testing and Debugging: A robust timing library includes testing and debugging components. Test suites ensure that the library functions correctly under various conditions and edge cases. Debugging tools help diagnose and fix any issues or unexpected behavior in the library.4. Integration and Usage of Timing LibrariesIntegrating a timing library into a program involves several steps:a. Include Header Files: The program must include the necessary timing library header files. This allows the program to access the library's functions and data structures.b. Linking: During the compilation and linking process, the program needs to link against the timing library object file. This ensures that the necessary library functions are available during program execution.c. Function Calls: The program can then call the timing libraryfunctions to perform timing-related operations. This includes starting and stopping timers, converting time formats, scheduling events, and implementing delays.d. Error Handling: Proper error handling is essential when using timing libraries. It is important to check for and handle any errors that may occur, such as timer failures or incorrect time conversions.e. Testing and Optimization: After integrating the timing library, thorough testing should be performed to ensure its correct behavior. Additionally, profiling tools can be used to optimize the program's performance by identifying any bottlenecks in the timing-related code.5. ConclusionA timing library structure encompasses various components and functionalities that enable accurate time measurement and manipulation in computer programs. Understanding the structure and integration process of a timing library is crucial for effectively utilizing its capabilities and ensuring reliable time-based operations in software development.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Research Topic task started on Thu Sep 1, 2011 at 1:13 PM2 Research Topic candidates were identified in CAPLUS and MEDLINE.using the phrase "Myrsine africana"Chemical components of volatile oil from fruits of Myrsine africana.Tang, Tianjun; Pu, Lanxiang; Yuan, Xiaohong; Deng, Qiao. Chemistry and Chemical Engineering,Mianyang Normal University, Mianyang, Sichuan Province, Peop. Rep. China. Shizhen Guoyi Guoyao (2010), 21(8), 1917-1918. Publisher: Shizhen Guoyi Guoyao Bianweihui, CODEN: SGGHAL ISSN: 1008-0805. Journal written in Chinese. AN 2011:59037 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractThe chem. components of volatile oil from fruits of Myrsine africana were extd. by using wet distn. method, and then were analyzed by using gas chromatog.-mass spectrometry (GC-MS). Totally 39 compds. were identified from the volatile oil of fruits, such as(1R)-5,6a-dimethyl-8-isopropenyldicyclo[4.0.0]dec-1-ene (5.823%),trans-10-methyl-1-methylene-7-isopropyldecahydronaphthalene (7.712%), α-selinene (2.410%), cis-(1S)-1,2,3,5,6,8a-hexahydro-4,7-dimethyl-1-isopropenylnaphthalene (3.775%), caryophyllene oxide (2.830%) and so on. The chem. components of volatile oil from fruits of Myrsine africanawas was reported for the first time.1 Extraction method of coumaronochromone-like compound and its medical applicationas immunosuppressive agent.Shen, Zhengwu; Shou, Qingyao. (Basilea Pharmaceutical (China) Co., Ltd., Peop. Rep. China). Faming Zhuanli Shenqing (2010), 9pp. CODEN: CNXXEV CN 101648959 A 20100217 Patent written in Chinese. Application: CN 2008-10041754 20080815. Priority: CN 2008-10041754 20080815. CAN 152:343504 AN 2010:226810 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractThe invention relates to a coumaronochromone-like compd. (1), whose physicochem. properties are given. The compd. (1) is produced by (1) pulverizing Myrsine africana, extg. with ethanol soln. at 50-90︒ 1-3 times, each 0.5-2 h; (2) concg. at 50-90︒ and 98 Kpa, suspending in water; (3) extg. with chloroform three times, concg.; (4) mixing with silica gel, loading on chromatog. column, eluting with petroleum ether-Et acetate, and purifying on C18 column with methanol-water as eluent. The coumaronochromone-like compd. may be used for prepg. immunosuppressant or medicine for treating immune diseases, including rheumatic arthritis and lupus erythematosus. The coumaronochromone-like compd. may be used for prepg. medicine for treating B cell-type chronic lymphocyte leukemia.2 Isoflavonoids from Myrsine africana useful in the treatment of immune diseases.Shen, Zhengwu; Shou, Qingyao. (Basilea Pharmaceutical (China) Co., Ltd., Peop. Rep. China). Faming Zhuanli Shenqing (2010), 33pp. CODEN: CNXXEV CN 101648937 A 20100217 Patent written in Chinese. Application: CN 2008-10041753 20080815. Priority: CN 2008-10041753 20080815. CAN 152:357774 AN 2010:226782 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractThe invention is related to isoflavonoid compds. isolated from Myrsine africana useful in the treatment of immune diseases. 8 Isoflavonoid compds. from Myrsine africana, which are3'-geranyl-5,7,2',4'-tetrahydroxyisoflavone,5,7,4'-trihydroxy-3'-[7-hydroxy-3,7-dimethyl-2(E)-octene]isoflavone,5,7-dihydroxy-[6"-methyl-6"-(4-methyl-3-pentenyl)pyrano(2",3",3',4')]isoflavone,5,7,4",5"-tetrahydroxy-[6"-methyl-6"-(4-methyl-3-pentenyl)pyrano(2",3",3',4')]isoflavone,5,7,2',4'-tetrahydroxy-3'-[7-hydroxy-3,7-dimethyl-2(E)-octene]isoflavanone,3'-geranyl-5,7,2',4'-tetrahydroxyisoflavonol, 3'-geranyl-4'-methoxy-5,7,2'-trihydroxyisoflavanone, and 3'-geranyl-5,7,4',5'-tetrahydroxyisoflavanone, are claimed. Title isoflavonoid compds. canbe prepd. by (1) pulverizing Myrsine africana, extg. with 5-10 times 60-90% (wt./vol.) ethanol at50-90︒ under heating for 1-3 times each for 0.5-2 h; (2) concg. extn. liquor at 98 Kpa and 50-90︒, dispersing in equal water to obtain suspension; (3) extg. with chloroform three times, combining extn. liquor, concg. at 98 Kpa and 30-50︒ to obtain chloroform ext.; (4) sepg. on silica gel column with petroleum ether-Et acetate(5:1-2:1, vol./vol.) and petroleum ether-acetone(4:1-2:1, vol./vol.) as eluent, further sepg. with Sephadex LH-20 column or reverse-phase C18 column to obtain these isoflavonoid compds. The inventive isoflavonoid compds. can be used for prepg. immunosuppressors or drugs for treating immune diseases such as B cell-type chronic lymphocytic leukemia. The inventive products have advantages of less toxic and side effects, good therapeutic effect and simple prepn. process.3 A new acetylated flavonoid glycoside from Myrsine africana L.Zou, Yanping; Tan, Changheng; Zhu, Dayuan. Department of Cereal and Food Sciences, North Dakota State University, Fargo, ND, USA. Bulletin of the Korean Chemical Society (2009), 30(9), 2111-2113. Publisher: Korean Chemical Society, CODEN: BKCSDE ISSN: 0253-2964. Journal written in English. CAN 153:638025 AN 2009:1238839CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractThe authors described the isolation of 10 flavonoids from the stems of Myrsine africana, includinga new acetylated flavonoid glycoside, mearnsetin 3-(2'',4''-diacetylrhamnoside).4 Determination of trace metals in different organs of Myrsine africana.Pu, Lan-xiang; Wang, Xiu-feng; Tang, Tian-jun. School of Life Science and Engineering, Southwest University of Science and Technology, Mianyang, Sichuan, Peop. Rep. China. Xinan Keji Daxue Xuebao (2009), 24(2), 78-81. Publisher: Xinan Keji Daxue Xuebao Bianjibu, CODEN: XKDXAZ ISSN: 1671-8755. Journal written in Chinese. CAN152:463360 AN 2009:897976 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R)) AbstractThe contents of Cu, Fe, Zn and Mn in root, stem, leaf and fruit of Myrsine africana were detd. by at. absorption spectrometry. The results showed that there were abundant Fe and moderate Mn, Zn and Cu in root, stem, leaf and fruit of Myrsine africana. Fe content was the highest in root (297.8410 μg/g), Mn and Zn contents were highest in leaf (78.8291 μg/g and 20.6814 μg/g, resp.), and Cu content was the highest in fruit (12.6383 μg/g). New scientific evidences were provided for the further studies and comprehensive utilization of medicinal efficiency of Myrsine africana.5 Chemical constituents from Myrsine africana L.Zou, Yan-Ping; Tan, Chang-Heng; Wang, Bao-De; Zhu, Da-Yuan; Kim, Se-Kwon. State Key Laboratory of Drug Research, Shanghai Institute of Materia Medica, Chinese Academy of Sciences, Shanghai, Peop. Rep. China. Helvetica Chimica Acta (2008), 91(11),2168-2173. Publisher: Verlag Helvetica Chimica Acta, CODEN: HCACAV ISSN: 0018-019X. Journal written in English. CAN 150:51360 AN 2008:1499610 CAPLUS(Copyright (C) 2011 ACS on SciFinder (R))AbstractThree new compds., myrsinoside A (=2,4-dihydroxy-6-methylphenylβ-D-(6'-galloyl)glucopyranoside; 1), myrsinoside B (2,4-dihydroxy-6-methylphenylβ-D-glucopyranoside; 2), and (3β,16α,20α)-3,16,28-trihydroxyolean-12-en-29-oic acid3-{O-β-D-glucopyranosyl-(1→2)-O-[β-D-glucopyranosyl-(1→4)]-α-L-arabinopyranoside} (3), alongwith four known compds., were isolated from the stems of Myrsine africana. The structures of these new compds. were elucidated on the basis of spectroscopic anal., including 1D- and2D-NMR and ESI-MS techniques, and chem. methods.6 Two novel antibacterial flavonoids from Myrsine africana L.Kang, Lu; Zhou, Jian-Xia; Shen, Zheng-Wu. School of Pharmacy, Shanghai University of Traditional Chinese Medicine, Shanghai, Peop. Rep. China. Chinese Journal of Chemistry (2007), 25(9), 1323-1325. Publisher: Shanghai Institute of Organic Chemistry, CODEN: CJOCEV ISSN: 1001-604X. Journal written in English. CAN 148:280234 AN2007:1093325 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractTwo novel flavonoids, myrsininone A (1), an isoflavone and myrsininone B (2), a flavanone, with very strong antibacterial activities, were isolated from the stems of Myrsine africana L. Their structures were elucidated by extensive spectroscopic analyses. The antibacterial activities were detd. by modified Resazuric MIC methods.7 Use of an extract of Myrsine africana in oxidative dyeing of keratinic fibers.Belcour Castro, Beatrice; Burgaud, Herve; Hussler, Georges; Seite, Michel. (L'Oreal, Fr.). Fr. Demande (2003), 25 pp. CODEN: FRXXBL FR 2832059 A1 20030516 Patent written in French. Application: FR 2001-14719 20011114. Priority: FR 2001-14719 20011114; US 2002-293481 20021114. CAN 138:390527 AN 2003:378636 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractThe use of an ext. of Myrsine africana in oxidative dyeing of the keratinic fibers, a new compn. contg. this ext., a process for dyeing of keratinic fibers as well as the dyed products obtained from the compn. of is disclosed. A hair dye contg. 0.5% M. africana ext. and 0.5%6-pyrrolidinyl-2,3-pyridinediamine was mixed with equal vol. of 3% hydrogen peroxide to give a red-violet color.8 Further flavonol glycosides from Myrsine africana leaves.Arot, Lawrence O. Manguro; Midiwo, Jacob Ogweno; Kraus, Wolfgang. Chemistry Department, University of Nairobi, Nairobi, Kenya. Natural Product Sciences (1997),3(1), 8-10. Publisher: Korean Society of Pharmacognosy, CODEN: NPSCFB ISSN:1226-3907. Journal written in English. CAN 127:260118 AN 1997:586178CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractA new flavonol glycoside, quercetin 3-rhamnosyl (1→3)galactoside was isolated from the leaves of M. africana. The known compds. kaempferol 3-rutinoside, 3'-O-methylquercetin 3-rutinoside, quercetin 3-rutinoside, and quercetin 3-rhamnosyl (1→6) galactoside were also isolated for the first time from this plant. Their structures were detd. by chem. and spectroscopic methods.9 Triterpenoids and steroids of Myrsine africana leaves.Manguro, Lawrence O. Arot; Midiwo, Jacob O.; Kraus, Wolfgang. Chemistry Dep., Univ. Nairobi, Nairobi, Kenya. Planta Medica (1997), 63(3), 290. Publisher: Thieme, CODEN: PLMEAA ISSN: 0032-0943. Journal written in English. CAN 127:140283AN 1997:399822 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractThree oleanane triterpenoids from Myrsine africana were isolated and characterized. All compds. were reported the 1st time from the plant. Myricadiol, taraxerone, and taraxerol inhibited Cladosporium cucumerinum.10 A new flavonol tetraglycoside from Myrsine africana leaves.Manguro, Lawrence O. A.; Midiwo, Jacob Ogweno; Kraus, Wolfgang. Chemistry Dep., Univ. Nairobi, Nairobi, Kenya. Natural Product Letters (1996), 9(2), 121-126. Publisher: Harwood, CODEN: NPLEEF ISSN: 1057-5634. Journal written in English. CAN126:183830 AN 1997:118833 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R)) AbstractA new flavonol glycoside, quercetin 3-glucosyl (1''' → 4'') rhamnoside-7-rhamnosyl (1''''' → 6'''') glucoside together with known flavonol glycosides, quercetin 3-rhamnoside , quercetin3-glucoside, and myricetin 3-galactoside were isolated from a methanolic ext. of Myrsine africana leaves and identified on the basis of their spectral data.11 A flavonol glycoside from Myrsine africana leaves.Arot, Lawrence O. Manguro; Widiwo, Jacob Ogweno; Kraus, Wolfgang. Chem. Dep., Univ. Nairobi, Nairobi, Kenya. Phytochemistry (1996), 43(5), 1107-1109. Publisher: Elsevier, CODEN: PYTCAS ISSN: 0031-9422. Journal written in English. CAN126:16759 AN 1996:722799 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R)) AbstractMyricetin 3-(3'',4''-diacetylrhamnoside), a novel flavonol glycoside together with myricetin3-rhamnoside, myricetin 7-rhamnoside, myricetin 3-xyloside, myricetin 3-arabinoside, quercetin3-galactoside, 3'-O-methylquercetin 3-glucoside, myricetin, quercetin, kaempferol and gallic acid have been isolated from a methanolic ext. of Myrsine africana leaves.12 New dialkyl benzoquinones from fruits of Myrsine africana and Maesa lanceolata. Midiwo, J. Ogweno; Arot, L. M. Dep. Chem., Univ. Nairobi, Nairobi, Kenya. Natural Product Letters (1996), 8(1), 11-14. Publisher: Harwood, CODEN: NPLEEF ISSN: 1057-5634. Journal written in English. CAN 125:177152 AN 1996:476573CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractTwo new natural benzoquinones, 2,5-dihydroxy-3-methyl-6-undecyl-1,4-benzoquinone (muketanin) and 2-O-methylmuketanin were isolated from fruits of M. africana and M. lanceolata, resp.13 Lipid components from the roots of Myrsine africana L.Nazir, Muhammad; Ahmad, Waqar; Ahmad, Mushtaq. Lab. Compl., PCSIR, Lahore, Pak. Pakistan Journal of Scientific and Industrial Research (1993), 35(7-8), 281-2. CODEN: PSIRAA ISSN: 0030-9885. Journal written in English. CAN 118:187834 AN1993:187834 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractThe hydrocarbons, fatty alcs. and fatty acids of the root lipids of M. africana were detd. The results were tabulated.14 Benzoquinones in Kenyan Myrsinaceae Part III: a new2,3-dihydroxyalkyl-1,4-benzoquinone (myrsinone) and 5-O-methyl embelin from Myrsine africana.Midiwo, J. Ogweno; Ghebremeskel, Y.; Arot, L. M.; Koyama, K.; Natori, S. Coll. Biol. Phys. Sci., Univ. Nairobi, Nairobi, Kenya. Bulletin of the Chemical Society of Ethiopia (1992), 6(1), 15-19. CODEN: BCETE6 ISSN: 1011-3924. Journal written in English. CAN 118:19211 AN 1993:19211 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R)) AbstractSpectroscopic anal. has shown that the new compd. myrsinone isolated from M. africana (Myrsinaceae) is 2,3-dihydroxy-5-undecyl-1,4-benzoquinone. The presence of 5-O-Me embelinwas also obsd.15 Tumor inhibitors. XXXV. Myrsine saponin, the active principle of Myrsine africana. Kupchan, S. Morris; Steyn, Pieter S.; Grove, Michael D.; Horsfield, Stella M.; Meitner, Sean W. Dep. of Pharm. Chem., Univ. of Wisconsin, Madison, WI, USA. Journal of Medicinal Chemistry (1969), 12(1), 167-9. CODEN: JMCMAR ISSN: 0022-2623. Journal written in English. CAN 70:46047 AN 1969:46047 CAPLUS (Copyright (C) 2011 ACS on SciFinder (R))AbstractAn alc. ext. of twigs and leaves of M. africana showed significant inhibitory activity against the Walker i.m. carcinosarcoma 256 in rats. Systematic fractionation of this ext. led to the isolationof a new saponin as the active principle. The characterization of the active Myrsine saponin as a glycoside of primulagenin A and the sugars glucose, rhamnose, galactose, and glucuronic acid, in the molar ratio 1:2:1:1, is described.16 Anti-spasmodic action of crude methanolic extract and a new compound isolated from the aerial parts of Myrsine africana.Azam Sadiq; Bashir Shumaila; Ahmad Bashir Pharmabiotech Research Lab, Centre for Biotechnology and Microbiology, University of Peshawar, Peshawar, Khyber Pakhtunkhwa, Pakistan bashirdr2001@ BMC complementary and alternative medicine (2011), 11 55. Journal code: 101088661. E-ISSN:1472-6882. Journal; Article; (JOURNAL ARTICLE) written in English. PubMed ID 21733176 AN 2011724358 In-process for MEDLINE (Copyright (C) 2011 U.S. National Library of Medicine on SciFinder (R))AbstractUNLABELLED: ABSTRACT: BACKGROUND: Myrsine africana is an herbaceous plant that is traditionally used as appetizer and carminative. Locally, it is used for the treatment of pulmonary tuberculosis, rheumatism and diarrhea by healers. The aims of the current study were to screen the crude methanol extract obtained from the aerial parts (leaves and stem) of M. africana, for antispasmodic actions on isolated tissues and further to subject the ethyl acetate (EtOAc) fraction of plant to column chromatography for isolation of pure compounds. METHODS: The antispasmodic action of the crude methanol extract was measured on the spontaneous rabbit's jejunum preparations at concentration 0.01, 0.03, 0.1, 0.3, 1.0, 5.0 and 10.0 mg/ml. The crude extract was also applied, in similar concentrations, on KCl (80 mM) induced contractions to explain its possible mode of action. RESULTS: A new compound Myrsigenin was isolated from the EtOAc fraction of M. africana. The structure of the compound was identified with the help of 13C-NMR, 1H-NMR, HMBC, HMQC, NOESY and COSY. The plant crude methanol extract showed a significant antispasmodic action on rabbit jejunum and abolished the tissue contraction completely at concentration of 5.0 mg/ml. CONCLUSION: The study concludes that the methanol crude extract of aerial parts of M. africana has antispasmodic action possibly through the calcium channel blocking mechanisms. A new compound Myrsigenin was isolated from the EtOAc fraction of the plant.17 Benzoquinone derivatives of Myrsine africana and Maesa lanceolata.Arot Manguro Lawrence O; Midiwo Jacob O; Kraus Wolfgang; Ugi Ivar Chemistry Department, University of Nairobi, PO Box 30197, Nairobi, Kenya Phytochemistry (2003), 64(4),855-62. Journal code: 0151434. ISSN:0031-9422. Journal; Article; (JOURNAL ARTICLE); (RESEARCH SUPPORT, NON-U.S. GOV'T) written in English. PubMed ID 14559281 AN 2003481729 MEDLINE (Copyright (C) 2011 U.S. National Library of Medicine on SciFinder (R))AbstractThe fruits of Myrsine africana afforded two new benzoquinone derivatives, methylvilangin and methylanhydrovilangin. On the other hand, from the fruits of Maesa lanceolata two more novel compounds; 2,5-dihydroxy-3-(nonadec-14-enyl)-benzoquinone and lanciaquinone were isolated.Their structural elucidation was achieved by spectroscopic measurements including 2D NMR experiments.18 Anthelmintic activity of preparations derived from Myrsine africana and Rapanea melanophloeos against the nematode parasite, Haemonchus contortus, of sheep.Githiori John B; Hoglund Johan; Waller Peter J; Baker R Leyden International Livestock Research Institute (ILRI), PO Box 30709, Nairobi, Kenya j.githiori@ Journal of ethnopharmacology (2002), 80(2-3), 187-91. Journal code: 7903310. ISSN:0378-8741. Journal; Article; (JOURNAL ARTICLE); (RESEARCH SUPPORT, NON-U.S. GOV'T) written in English. PubMed ID 12007709 AN 2002268902 MEDLINE (Copyright (C) 2011 U.S. National Library of Medicine on SciFinder (R))AbstractMyrsine africana L. and Rapanea melanophloeos L. belong to the plant family Myrsinaceae. Various rural communities in Kenya, such as smallholder farmers and pastoralists, use them to treat their livestock. The anthelmintic effects/activities of leaves and fruits of M. africana and fruits of R. melanophloeos were tested in sheep experimentally infected with the nematode parasite Haemonchus contortus. Male lambs were infected with 3000-5000 third stage larvae of H. contortus and treated 28 days after inoculation with concoctions made from leaves or fruits of the plants. No significant reduction in faecal nematode egg counts was observed with any of the concoctions at any of the doses tested. Packed red cell volume decreased and live weight increased at similar rates in treated and control groups, thus there was no significant effect of treatment. The results showed that the tested extracts of the M. africana and R. melanophloeos were not efficacious against H. contortus in sheep.19 Triterpenoids and steroids of Myrsine africana leaves.Manguro L O; Midiwo J O; Kraus W Chemistry Department, University of Nairobi, Kenya Planta medica (1997), 63(3), 290. Journal code: 0066751. ISSN:0032-0943. Journal; Article; (JOURNAL ARTICLE); (RESEARCH SUPPORT, NON-U.S. GOV'T) written in English. PubMed ID 9265194 AN 1997402147 MEDLINE (Copyright (C) 2011 U.S. National Library of Medicine on SciFinder (R))20 Bioactive compounds from the root of Myrsine africana.Li X H; McLaughlin J L Department of Medicinal Chemistry and Pharmacognosy, School of Pharmacy and Pharmacal Sciences, Purdue University, West Lafayette, Indiana 47907Journal of natural products (1989), 52(3), 660-2. Journal code: 7906882.ISSN:0163-3864. Journal; Article; (JOURNAL ARTICLE); (RESEARCH SUPPORT, U.S. GOV'T, P.H.S.) written in English. PubMed ID 2778455 AN 1989381728 MEDLINE (Copyright (C) 2011 U.S. National Library of Medicine on SciFinder (R))AbstractBioactivity-directed fractionation of the EtOH extract of the roots of Myrsine africana, using lethality to brine shrimp, led to the isolation and identification of emodin and2-hydroxychrysophanol as cytotoxic components, the latter being a new natural product.Nepodin and 5-methoxy-7-hydroxyphthalide were also isolated but were not significantly cytotoxic.。