SimCPN A Web-Based Simulator for Coloured Petri Nets
Multi-scale structural similarity for image quality assesment

MULTI-SCALE STRUCTURAL SIMILARITY FOR IMAGE QUALITY ASSESSMENT Zhou Wang1,Eero P.Simoncelli1and Alan C.Bovik2(Invited Paper)1Center for Neural Sci.and Courant Inst.of Math.Sci.,New York Univ.,New York,NY10003 2Dept.of Electrical and Computer Engineering,Univ.of Texas at Austin,Austin,TX78712 Email:zhouwang@,eero.simoncelli@,bovik@ABSTRACTThe structural similarity image quality paradigm is based on the assumption that the human visual system is highly adapted for extracting structural information from the scene,and therefore a measure of structural similarity can provide a good approxima-tion to perceived image quality.This paper proposes a multi-scale structural similarity method,which supplies moreflexibility than previous single-scale methods in incorporating the variations of viewing conditions.We develop an image synthesis method to calibrate the parameters that define the relative importance of dif-ferent scales.Experimental comparisons demonstrate the effec-tiveness of the proposed method.1.INTRODUCTIONObjective image quality assessment research aims to design qual-ity measures that can automatically predict perceived image qual-ity.These quality measures play important roles in a broad range of applications such as image acquisition,compression,commu-nication,restoration,enhancement,analysis,display,printing and watermarking.The most widely used full-reference image quality and distortion assessment algorithms are peak signal-to-noise ra-tio(PSNR)and mean squared error(MSE),which do not correlate well with perceived quality(e.g.,[1]–[6]).Traditional perceptual image quality assessment methods are based on a bottom-up approach which attempts to simulate the functionality of the relevant early human visual system(HVS) components.These methods usually involve1)a preprocessing process that may include image alignment,point-wise nonlinear transform,low-passfiltering that simulates eye optics,and color space transformation,2)a channel decomposition process that trans-forms the image signals into different spatial frequency as well as orientation selective subbands,3)an error normalization process that weights the error signal in each subband by incorporating the variation of visual sensitivity in different subbands,and the vari-ation of visual error sensitivity caused by intra-or inter-channel neighboring transform coefficients,and4)an error pooling pro-cess that combines the error signals in different subbands into a single quality/distortion value.While these bottom-up approaches can conveniently make use of many known psychophysical fea-tures of the HVS,it is important to recognize their limitations.In particular,the HVS is a complex and highly non-linear system and the complexity of natural images is also very significant,but most models of early vision are based on linear or quasi-linear oper-ators that have been characterized using restricted and simplistic stimuli.Thus,these approaches must rely on a number of strong assumptions and generalizations[4],[5].Furthermore,as the num-ber of HVS features has increased,the resulting quality assessment systems have become too complicated to work with in real-world applications,especially for algorithm optimization purposes.Structural similarity provides an alternative and complemen-tary approach to the problem of image quality assessment[3]–[6].It is based on a top-down assumption that the HVS is highly adapted for extracting structural information from the scene,and therefore a measure of structural similarity should be a good ap-proximation of perceived image quality.It has been shown that a simple implementation of this methodology,namely the struc-tural similarity(SSIM)index[5],can outperform state-of-the-art perceptual image quality metrics.However,the SSIM index al-gorithm introduced in[5]is a single-scale approach.We consider this a drawback of the method because the right scale depends on viewing conditions(e.g.,display resolution and viewing distance). In this paper,we propose a multi-scale structural similarity method and introduce a novel image synthesis-based approach to calibrate the parameters that weight the relative importance between differ-ent scales.2.SINGLE-SCALE STRUCTURAL SIMILARITYLet x={x i|i=1,2,···,N}and y={y i|i=1,2,···,N}be two discrete non-negative signals that have been aligned with each other(e.g.,two image patches extracted from the same spatial lo-cation from two images being compared,respectively),and letµx,σ2x andσxy be the mean of x,the variance of x,and the covariance of x and y,respectively.Approximately,µx andσx can be viewed as estimates of the luminance and contrast of x,andσxy measures the the tendency of x and y to vary together,thus an indication of structural similarity.In[5],the luminance,contrast and structure comparison measures were given as follows:l(x,y)=2µxµy+C1µ2x+µ2y+C1,(1)c(x,y)=2σxσy+C2σ2x+σ2y+C2,(2)s(x,y)=σxy+C3σxσy+C3,(3) where C1,C2and C3are small constants given byC1=(K1L)2,C2=(K2L)2and C3=C2/2,(4)Fig.1.Multi-scale structural similarity measurement system.L:low-passfiltering;2↓:downsampling by2. respectively.L is the dynamic range of the pixel values(L=255for8bits/pixel gray scale images),and K1 1and K2 1aretwo scalar constants.The general form of the Structural SIMilarity(SSIM)index between signal x and y is defined as:SSIM(x,y)=[l(x,y)]α·[c(x,y)]β·[s(x,y)]γ,(5)whereα,βandγare parameters to define the relative importanceof the three components.Specifically,we setα=β=γ=1,andthe resulting SSIM index is given bySSIM(x,y)=(2µxµy+C1)(2σxy+C2)(µ2x+µ2y+C1)(σ2x+σ2y+C2),(6)which satisfies the following conditions:1.symmetry:SSIM(x,y)=SSIM(y,x);2.boundedness:SSIM(x,y)≤1;3.unique maximum:SSIM(x,y)=1if and only if x=y.The universal image quality index proposed in[3]corresponds to the case of C1=C2=0,therefore is a special case of(6).The drawback of such a parameter setting is that when the denominator of Eq.(6)is close to0,the resulting measurement becomes unsta-ble.This problem has been solved successfully in[5]by adding the two small constants C1and C2(calculated by setting K1=0.01 and K2=0.03,respectively,in Eq.(4)).We apply the SSIM indexing algorithm for image quality as-sessment using a sliding window approach.The window moves pixel-by-pixel across the whole image space.At each step,the SSIM index is calculated within the local window.If one of the image being compared is considered to have perfect quality,then the resulting SSIM index map can be viewed as the quality map of the other(distorted)image.Instead of using an8×8square window as in[3],a smooth windowing approach is used for local statistics to avoid“blocking artifacts”in the quality map[5].Fi-nally,a mean SSIM index of the quality map is used to evaluate the overall image quality.3.MULTI-SCALE STRUCTURAL SIMILARITY3.1.Multi-scale SSIM indexThe perceivability of image details depends the sampling density of the image signal,the distance from the image plane to the ob-server,and the perceptual capability of the observer’s visual sys-tem.In practice,the subjective evaluation of a given image varies when these factors vary.A single-scale method as described in the previous section may be appropriate only for specific settings.Multi-scale method is a convenient way to incorporate image de-tails at different resolutions.We propose a multi-scale SSIM method for image quality as-sessment whose system diagram is illustrated in Fig. 1.Taking the reference and distorted image signals as the input,the system iteratively applies a low-passfilter and downsamples thefiltered image by a factor of2.We index the original image as Scale1, and the highest scale as Scale M,which is obtained after M−1 iterations.At the j-th scale,the contrast comparison(2)and the structure comparison(3)are calculated and denoted as c j(x,y) and s j(x,y),respectively.The luminance comparison(1)is com-puted only at Scale M and is denoted as l M(x,y).The overall SSIM evaluation is obtained by combining the measurement at dif-ferent scales usingSSIM(x,y)=[l M(x,y)]αM·Mj=1[c j(x,y)]βj[s j(x,y)]γj.(7)Similar to(5),the exponentsαM,βj andγj are used to ad-just the relative importance of different components.This multi-scale SSIM index definition satisfies the three conditions given in the last section.It also includes the single-scale method as a spe-cial case.In particular,a single-scale implementation for Scale M applies the iterativefiltering and downsampling procedure up to Scale M and only the exponentsαM,βM andγM are given non-zero values.To simplify parameter selection,we letαj=βj=γj forall j’s.In addition,we normalize the cross-scale settings such thatMj=1γj=1.This makes different parameter settings(including all single-scale and multi-scale settings)comparable.The remain-ing job is to determine the relative values across different scales. Conceptually,this should be related to the contrast sensitivity func-tion(CSF)of the HVS[7],which states that the human visual sen-sitivity peaks at middle frequencies(around4cycles per degree of visual angle)and decreases along both high-and low-frequency directions.However,CSF cannot be directly used to derive the parameters in our system because it is typically measured at the visibility threshold level using simplified stimuli(sinusoids),but our purpose is to compare the quality of complex structured im-ages at visible distortion levels.3.2.Cross-scale calibrationWe use an image synthesis approach to calibrate the relative impor-tance of different scales.In previous work,the idea of synthesizing images for subjective testing has been employed by the“synthesis-by-analysis”methods of assessing statistical texture models,inwhich the model is used to generate a texture with statistics match-ing an original texture,and a human subject then judges the sim-ilarity of the two textures [8]–[11].A similar approach has also been qualitatively used in demonstrating quality metrics in [5],[12],though quantitative subjective tests were not conducted.These synthesis methods provide a powerful and efficient means of test-ing a model,and have the added benefit that the resulting images suggest improvements that might be made to the model[11].M )distortion level (MSE)12345Fig.2.Demonstration of image synthesis approach for cross-scale calibration.Images in the same row have the same MSE.Images in the same column have distortions only in one specific scale.Each subject was asked to select a set of images (one from each scale),having equal quality.As an example,one subject chose the marked images.For a given original 8bits/pixel gray scale test image,we syn-thesize a table of distorted images (as exemplified by Fig.2),where each entry in the table is an image that is associated witha specific distortion level (defined by MSE)and a specific scale.Each of the distorted image is created using an iterative procedure,where the initial image is generated by randomly adding white Gaussian noise to the original image and the iterative process em-ploys a constrained gradient descent algorithm to search for the worst images in terms of SSIM measure while constraining MSE to be fixed and restricting the distortions to occur only in the spec-ified scale.We use 5scales and 12distortion levels (range from 23to 214)in our experiment,resulting in a total of 60images,as demonstrated in Fig.2.Although the images at each row has the same MSE with respect to the original image,their visual quality is significantly different.Thus the distortions at different scales are of very different importance in terms of perceived image quality.We employ 10original 64×64images with different types of con-tent (human faces,natural scenes,plants,man-made objects,etc.)in our experiment to create 10sets of distorted images (a total of 600distorted images).We gathered data for 8subjects,including one of the authors.The other subjects have general knowledge of human vision but did not know the detailed purpose of the study.Each subject was shown the 10sets of test images,one set at a time.The viewing dis-tance was fixed to 32pixels per degree of visual angle.The subject was asked to compare the quality of the images across scales and detect one image from each of the five scales (shown as columns in Fig.2)that the subject believes having the same quality.For example,one subject chose the images marked in Fig.2to have equal quality.The positions of the selected images in each scale were recorded and averaged over all test images and all subjects.In general,the subjects agreed with each other on each image more than they agreed with themselves across different images.These test results were normalized (sum to one)and used to calculate the exponents in Eq.(7).The resulting parameters we obtained are β1=γ1=0.0448,β2=γ2=0.2856,β3=γ3=0.3001,β4=γ4=0.2363,and α5=β5=γ5=0.1333,respectively.4.TEST RESULTSWe test a number of image quality assessment algorithms using the LIVE database (available at [13]),which includes 344JPEG and JPEG2000compressed images (typically 768×512or similar size).The bit rate ranges from 0.028to 3.150bits/pixel,which allows the test images to cover a wide quality range,from in-distinguishable from the original image to highly distorted.The mean opinion score (MOS)of each image is obtained by averag-ing 13∼25subjective scores given by a group of human observers.Eight image quality assessment models are being compared,in-cluding PSNR,the Sarnoff model (JNDmetrix 8.0[14]),single-scale SSIM index with M equals 1to 5,and the proposed multi-scale SSIM index approach.The scatter plots of MOS versus model predictions are shown in Fig.3,where each point represents one test image,with its vertical and horizontal axes representing its MOS and the given objective quality score,respectively.To provide quantitative per-formance evaluation,we use the logistic function adopted in the video quality experts group (VQEG)Phase I FR-TV test [15]to provide a non-linear mapping between the objective and subjective scores.After the non-linear mapping,the linear correlation coef-ficient (CC),the mean absolute error (MAE),and the root mean squared error (RMS)between the subjective and objective scores are calculated as measures of prediction accuracy .The prediction consistency is quantified using the outlier ratio (OR),which is de-Table1.Performance comparison of image quality assessment models on LIVE JPEG/JPEG2000database[13].SS-SSIM: single-scale SSIM;MS-SSIM:multi-scale SSIM;CC:non-linear regression correlation coefficient;ROCC:Spearman rank-order correlation coefficient;MAE:mean absolute error;RMS:root mean squared error;OR:outlier ratio.Model CC ROCC MAE RMS OR(%)PSNR0.9050.901 6.538.4515.7Sarnoff0.9560.947 4.66 5.81 3.20 SS-SSIM(M=1)0.9490.945 4.96 6.25 6.98 SS-SSIM(M=2)0.9630.959 4.21 5.38 2.62 SS-SSIM(M=3)0.9580.956 4.53 5.67 2.91 SS-SSIM(M=4)0.9480.946 4.99 6.31 5.81 SS-SSIM(M=5)0.9380.936 5.55 6.887.85 MS-SSIM0.9690.966 3.86 4.91 1.16fined as the percentage of the number of predictions outside the range of±2times of the standard deviations.Finally,the predic-tion monotonicity is measured using the Spearman rank-order cor-relation coefficient(ROCC).Readers can refer to[15]for a more detailed descriptions of these measures.The evaluation results for all the models being compared are given in Table1.From both the scatter plots and the quantitative evaluation re-sults,we see that the performance of single-scale SSIM model varies with scales and the best performance is given by the case of M=2.It can also be observed that the single-scale model tends to supply higher scores with the increase of scales.This is not surprising because image coding techniques such as JPEG and JPEG2000usually compressfine-scale details to a much higher degree than coarse-scale structures,and thus the distorted image “looks”more similar to the original image if evaluated at larger scales.Finally,for every one of the objective evaluation criteria, multi-scale SSIM model outperforms all the other models,includ-ing the best single-scale SSIM model,suggesting a meaningful balance between scales.5.DISCUSSIONSWe propose a multi-scale structural similarity approach for image quality assessment,which provides moreflexibility than single-scale approach in incorporating the variations of image resolution and viewing conditions.Experiments show that with an appropri-ate parameter settings,the multi-scale method outperforms the best single-scale SSIM model as well as state-of-the-art image quality metrics.In the development of top-down image quality models(such as structural similarity based algorithms),one of the most challeng-ing problems is to calibrate the model parameters,which are rather “abstract”and cannot be directly derived from simple-stimulus subjective experiments as in the bottom-up models.In this pa-per,we used an image synthesis approach to calibrate the param-eters that define the relative importance between scales.The im-provement from single-scale to multi-scale methods observed in our tests suggests the usefulness of this novel approach.However, this approach is still rather crude.We are working on developing it into a more systematic approach that can potentially be employed in a much broader range of applications.6.REFERENCES[1] A.M.Eskicioglu and P.S.Fisher,“Image quality mea-sures and their performance,”IEEE munications, vol.43,pp.2959–2965,Dec.1995.[2]T.N.Pappas and R.J.Safranek,“Perceptual criteria for im-age quality evaluation,”in Handbook of Image and Video Proc.(A.Bovik,ed.),Academic Press,2000.[3]Z.Wang and A.C.Bovik,“A universal image quality in-dex,”IEEE Signal Processing Letters,vol.9,pp.81–84,Mar.2002.[4]Z.Wang,H.R.Sheikh,and A.C.Bovik,“Objective videoquality assessment,”in The Handbook of Video Databases: Design and Applications(B.Furht and O.Marques,eds.), pp.1041–1078,CRC Press,Sept.2003.[5]Z.Wang,A.C.Bovik,H.R.Sheikh,and E.P.Simon-celli,“Image quality assessment:From error measurement to structural similarity,”IEEE Trans.Image Processing,vol.13, Jan.2004.[6]Z.Wang,L.Lu,and A.C.Bovik,“Video quality assessmentbased on structural distortion measurement,”Signal Process-ing:Image Communication,special issue on objective video quality metrics,vol.19,Jan.2004.[7] B.A.Wandell,Foundations of Vision.Sinauer Associates,Inc.,1995.[8]O.D.Faugeras and W.K.Pratt,“Decorrelation methods oftexture feature extraction,”IEEE Pat.Anal.Mach.Intell., vol.2,no.4,pp.323–332,1980.[9] A.Gagalowicz,“A new method for texturefields synthesis:Some applications to the study of human vision,”IEEE Pat.Anal.Mach.Intell.,vol.3,no.5,pp.520–533,1981. [10] D.Heeger and J.Bergen,“Pyramid-based texture analy-sis/synthesis,”in Proc.ACM SIGGRAPH,pp.229–238,As-sociation for Computing Machinery,August1995.[11]J.Portilla and E.P.Simoncelli,“A parametric texture modelbased on joint statistics of complex wavelet coefficients,”Int’l J Computer Vision,vol.40,pp.49–71,Dec2000. [12]P.C.Teo and D.J.Heeger,“Perceptual image distortion,”inProc.SPIE,vol.2179,pp.127–141,1994.[13]H.R.Sheikh,Z.Wang, A. C.Bovik,and L.K.Cormack,“Image and video quality assessment re-search at LIVE,”/ research/quality/.[14]Sarnoff Corporation,“JNDmetrix Technology,”http:///products_services/video_vision/jndmetrix/.[15]VQEG,“Final report from the video quality experts groupon the validation of objective models of video quality assess-ment,”Mar.2000./.PSNRM O SSarnoffM O S(a)(b)Single−scale SSIM (M=1)M O SSingle−scale SSIM (M=2)M O S(c)(d)Single−scale SSIM (M=3)M O SSingle−scale SSIM (M=4)M O S(e)(f)Single−scale SSIM (M=5)M O SMulti−scale SSIMM O S(g)(h)Fig.3.Scatter plots of MOS versus model predictions.Each sample point represents one test image in the LIVE JPEG/JPEG2000image database [13].(a)PSNR;(b)Sarnoff model;(c)-(g)single-scale SSIM method for M =1,2,3,4and 5,respectively;(h)multi-scale SSIM method.。
211188563_基于堆叠监督自编码器的蓝莓果渣花青素预测模型

刘思岐,冯国红,刘中深,等. 基于堆叠监督自编码器的蓝莓果渣花青素预测模型[J]. 食品工业科技,2023,44(10):304−310. doi:10.13386/j.issn1002-0306.2022070227LIU Siqi, FENG Guohong, LIU Zhongshen, et al. An Anthocyanin Prediction Model of Blueberry Pomace Based on Stacked Supervised Autoencoders[J]. Science and Technology of Food Industry, 2023, 44(10): 304−310. (in Chinese with English abstract). doi:10.13386/j.issn1002-0306.2022070227· 分析检测 ·基于堆叠监督自编码器的蓝莓果渣花青素预测模型刘思岐1,冯国红1, *,刘中深2,朱玉杰1(1.东北林业大学工程技术学院,黑龙江哈尔滨 150040;2.黑龙江农业工程职业学院,黑龙江哈尔滨 150025)摘 要:基于可见近红外光谱技术,采用深度学习中的堆叠监督自编码器(stacked supervised autoencoders ,SSAE )对蓝莓果渣的花青素含量进行了建模。
首先对光谱数据进行预处理和特征筛选处理,以预设SSAE 模型的预测集均方根误差(RMSEP )最低为标准,选择出178个特征波长;以选择出的特征波长处的吸光值作为SSAE 模型的输入,以蓝莓果渣中的花青素含量为输出,讨论SSAE 模型激活参数、节点数、训练次数和学习率,得到SSAE 最优参数,即激活函数rule 、结构178-60-5-1、训练次数70、学习率0.01。
选取训练集均方根误差(RMSEC )、预测集均方根误差(RMSEP )、预测集相关系数(R p )为评价标准,获得所建立模型的RMSEC 、RMSEP 、R p 分别为1.0500、0.3835、0.9042。
重金属污染土壤修复治理案例SimPad模拟仿真训练
重金属污染土壤修复治理案例SimPad模拟仿真训练近年来,由于工业化进程的加速和人类活动的不当,重金属污染问题已经成为全球环境保护的重点之一。
重金属污染对土壤环境和生态系统的健康造成了严重威胁,因此,寻找有效的修复治理方法变得尤为重要。
本文将介绍 SimPad 模拟仿真训练在重金属污染土壤修复治理案例中的应用,并着重讨论该训练在实践中的意义和效果。
SimPad 模拟仿真训练是一种基于模型的仿真系统,通过搭建环境模型和模拟环境,培训参与者在虚拟场景中进行各种场景模拟和实验操作。
在重金属污染土壤修复治理案例中,SimPad 可以帮助研究人员和相关从业人员在虚拟环境中进行模拟实验,测试不同的修复治理方法和策略的效果,从而提高修复过程的效率和精确性。
SimPad 的使用在重金属污染土壤修复治理中具有以下几个方面的优势。
首先,SimPad 可以模拟不同的土壤环境和重金属污染情况,参与者可以针对不同种类和程度的重金属污染进行模拟实验,测试不同的修复治理方案对于不同情况的适应性,从而找到最佳的修复策略。
其次,SimPad 可以提供实时监测和数据分析功能,参与者可以实时获取修复过程中的各项参数和指标,通过数据分析对修复效果进行评估和优化。
第三,SimPad 可以模拟不同修复材料和技术的使用,帮助参与者了解和熟悉各种土壤修复材料的性能和适用范围,从而选择最合适的修复材料和技术。
在 SimPad 模拟仿真训练中,参与者可以根据重金属污染土壤的实际情况,选择合适的修复方法和策略进行模拟实验。
例如,在铅污染土壤的修复中,参与者可以模拟使用不同的植物修复技术,如植物吸收和植物盖砂等,测试不同植物种类和生长条件下的修复效果。
同时,SimPad 还可以模拟使用不同的修复材料,如有机改良剂、磷酸铁等,帮助参与者选择最合适的修复材料。
通过反复实验和数据分析,参与者可以得到最佳修复方案,并为实际的污染土壤修复工作提供参考。
除了在研究和实践中的应用,SimPad 模拟仿真训练还可以用于专业人员的培训和能力提升。
ROMSTOOLS中文翻译
ROMSTOOLS中文翻译表的内容介绍安装系统要求获取文件教程︰南部格拉示例入门︰处理输入的文件构建网格让风和其他表面通量初始和侧边界条件得到的径流强迫编译模型配置参数︰param.hcppdef.h数值模拟和物理选项︰编译脚本︰运行模式长时间的模拟得到的结果诊断程序潮汐生物地球化学年度间模拟表面的强迫数据得到从CFSR(推荐)NCEP2再分析获取表面强迫数据每月气候学数据获取侧边界条件运行年际运行的模型嵌套嵌套网格的制备编译和运行模型海洋预报︰Forecat_tool参考书目吉尔达斯由布莱特PenvenPatrickMarcheiello和Laurent鲁研究所倒leDéveloppement(税务局)44大道de敦刻尔克,CS90009法国介绍区域海洋建模系统(ROM)是新的一代海洋环流模式(Shchepetkin和威廉姆斯,2005年),已专为区域海洋系统的准确的模拟。
读者可参考Shchepetkin和威廉姆斯(2003年)、Shchepetkin和威廉姆斯(2005年)为模型的完整描述。
ROM已经申请区域模拟研究各种不同地区的世界海洋(例如Marcheielloetal.,2003年;Penvenetal.,2001年;麦克格雷迪etal.,2002年;海德福格尔等人,2000年;DiLorenzoetal.,2003年;Blanke等人,2002年)。
若要执行区域模拟ROM,建模者需要提供特定格式的多个数据文件︰水平网格,海底地形表面强迫、侧边界条件......他还需要对模型输出分析。
这里描述的工具原本是为了执行这些任务。
目标是要能够建立一个标准的区域模型配置在最短的时间。
安装在ROMSTOOLS包中包含所有其他必要Matlab工具箱(即海-气、面具、netcdf或m_map......)。
全球数据集,例如地形(史密斯和桑德,1997年),水文(Conkright等人,2002年)或地表通量(DaSilvaetal.,1994年),也被包括在内。
VL53L0X 时间间隔距离传感器用户手册说明书

VL53L0X Distance SensorUser ManualVL53L0X Distance Sensor is a Time-of-Flight(ToF)ranging module based on the VL53L0X from ST,with accurate ranging up to2m,it is controlled through I2C interface, and pretty low power consumption.The VL53L0X is a ToF sensor which embeds the ST’s second generation FlightSense patented technology.Unlike conventional ranging sensors,the VL53L0X is able to provide accurate distance measurement whatever the target color and reflectance,achieves betteranti-interference capability.FEATURES●I2C communication interface,control the module on/off via IO pins●Onboard voltage translator,compatible with3.3V/5V operating voltage●Comes with development resources and manual(examples for RaspberryPi/Arduino/STM32)SPECIFICATIONSOperating voltage:3.3V/5VDimension:20mm×24mmMounting holes size:2.0mmRanging distance:30~2000mmRanging accuracy:±5%(high speed mode),±3%(high accuracy mode)Ranging time(min):20ms(high speed mode),200ms(high accuracy mode) Field of view:25°Laser wavelength:940nmOperating temperature:-20~70°CPINOUTSVCC: 3.3V/5V power inputGND:groundSDA:I2C data pinSCL:I2C clock pinSHUT:shutdown control,connects to IO pinINT:interrupt output,connects to IO pinVL53L0XVL53L0X Time-of-Flight(ToF)ranging sensor is ST’s second generationlaser-ranging module housed in the smallest package on the market today.TheVL53L0X is a fully integrated miniature module which integrates embedded infrared ranging sensor,VCSEL(Vertical Cavity Surface-Emitting Laser),couples with internal physical infrared filters and a leading-edge SPAD array(Single Photon Avalanche Diodes).The VL53L0x embeds ST’s second generation FightSense TM patented technology,has longer ranging distance,higher rate and accuracy,opening the door to various new applicationVL53L0X can measure absolute distances up to2m t whatever the target reflectances unlike conventional technologies.It’s ultra-Low designs supports for wireless and IOT application.Features:●Fully integrated miniature module–940nm laser VCSEL–VCSEL driver–Ranging sensor with advanced embedded micro controller–4.4x2.4x1.0mm●Fast,accurate distance ranging–Measures absolute range up to2m–Reported range is independent of the target reflectance–Advanced embedded optical cross-talk compensation to simplify cover glass selection●Eye safe–Class1laser device compliant with latest standard IEC60825-1:2014-3rd edition●Easy integration–Single reflowable component–No additional optics–Single power supply–I2C interface for device control and data transfer–Xshutdown(reset)and interrupt GPIO–Programmable I2C addressPictures:For more details,please read the datasheetWORKING WITH RASPBERRY PIThe demo code is based on open-source project on github: https:///cassou/VL53L0X_raspHARDWARE CONNECTIONThe connection is based on Raspberry PiCOMPILING AND RUNGING1.Download demo code from Wiki2.Unzip and copy the code of Raspberry Pi to your Pi(Recommend put on/home/pi/)3.Enter the path of the demo code on Terminal and run this compiling commandsudo make clean&&sudo make&&sudo make examples4.After compiling,enter bin folder and list the files as below:5.Execute command to run the code vl53l0x_SingleRanging_Long_Range_Example:6.Execute the command to run code vl53l0x_ContinuousRanging_Example:WORKING WITH ARDUINOHARDWARE CONNECTIONThe connection is based on Waveshare UNO PLUSRUNINGCopy the VL53L0X-Arduino-Library folder which is under Arduino demo code directory to Arduino IDE’s Libraries directory which is under the installation directoryof your IDE.Then Open Arduino IDE,and choose File->Examples-> VL53L0X-Arduino-LibraryCompiling and run5examples for test as below:1.high_accuracy_ranging:High accuracy ranging which will cost more times2.high_speed_ranging:Fast ranging,cost less time and low accuracy3.long_distance_ranging:Long distance ranging,with bigger measure rang4.single_ranging:Single ranging mode5.continuous_ranging:Continuous ranging modeFor more information about different ranging modes,please read VL53L0X APIWORKING WITH STM32HARDWARE CONNECTIONThis connection is based on XNUCLEO-F411RE/NUCLEO-F401RE:RUNNING VL53L0X_GUI1.Connecting sensor to NUCLEO-F401RE board as Hardware connection above2.Install ST’s VL53L0X_GUI software and run it.The software will write the testfirmware to NUCLEO board automatically.(Note:for this example,you need touse the NUCLEO-F401RE development board,and it is not an open-source code)3.Switch to Low-Power Automous,Distance Mode choose Short,then click Start.Distance curve will be showed on the softwareFor more information about STM32examples VL53L0X,please visit ST website.。
SESAM Release Note SIMA V4.1.0说明书

SESAM RELEASE NOTESIMASima is a simulation and analysis tool for marine operations and floating systems — from modelling to post-processing of results.Valid from program version 4.1.0SAFER, SMARTER, GREENERSesam Release NoteSimaDate: 19 Apr 2021Valid from Sima version 4.1.0Prepared by DNV GL – Digital SolutionsE-mail sales: *****************© DNV GL AS. All rights reservedThis publication or parts thereof may not be reproduced or transmitted in any form or by any means, including copying or recording, without the prior written consent of DNV GL AS.DOCUMENTATIONInstallation instructionsRequired:•64 bit Windows 7/8/10•4 GB RAM available for SIMA (e.g. 8 GB RAM total in total on the computer)•1 GB free disk space•Updated drivers for graphics cardNote that Windows Server (all versions), Windows XP, Windows Vista, and any 32-bit Windows are not supported.Recommended:•64-bit Windows 10•16 GB RAM•Fast quad core processor (e.g. Intel i7)•High-resolution screen (1920 × 1200 / 1080p)•Graphics card: DirectX 10.1 or 11.X compatible; 512 MB or higher•F ast SSD disk, as large as possible (capacity requirements depends heavily on simulation settings, e.g. 500 GB is a good start)•3-button mouseHigh disk speed is important if running more than 2 simultaneous simulations in parallel. Example: If the user has enough SIMO-licenses and has configured SIMA to run 4 SIMO-calculations in parallel, then the simulations will probably be disk-speed-bound, and not CPU bound (with the above recommended hardware). Note that this is heavily dependent on the simulation parameters, so the result may vary. The default license type should now allow for unlimited parallel runs on one PC, workstation of cluster.Updated Drivers for Graphics CardThe driver of the graphics card should be upgraded to the latest version. This is especially important if you experience problems with the 3D graphics. Note that the version provided by Windows update is not necessarily up to date – download directly from your hardware vendors web-site.Installing graphics drivers may require elevated access privileges. Your IT support staff should be able to help you with this.SIMA should work with at least one graphics-mode (OpenGL, OpenGL2, DirectX 9 or DirectX 11) for all graphics cards that can run Windows 7 or 8. However, graphics cards can contain defects in their lower-level drivers, firmware and/or hardware. SIMA use the software “HOOPS” from the vendor “Tech Soft 3D” to draw 3D-graphics. For advanced users that would like more information on what graphics cards and drivers that does not work with SIMA (and an indication on what probably will work), please see the web page /hoops/hoops-visualize/graphics- cards/ .Before reading the compatibility table you may want to figure out which version of HOOPS SIMAis using. To do this open Help > About > Installation Details, locate the Plug-ins tab and look for the plug-in provider TechSoft 3D (click the Provider column title twice for a more suitable sort order). The version number is listed in the Version column. Also remember that all modes (OpenGL, OpenGL2, DirectX 9, DirextX 11) are available in SIMA.Upgrading from Earlier VersionsAfter upgrading to a newer version of SIMA, your workspaces may also require an update. This will be done automatically as soon as you open a workspace not created with the new version. You may not be able to open this workspace again using an older version of SIMA.Preference settings should normally be retained after upgrading, however you may want to open the preference dialog ( Window > Preferences ) in order to verify this.Verify Correct InstallationTo verify a correct installation of SIMA, perform the following steps:1.Start SIMA (by the shortcut created when installing, or by running the SIMA executable)a.If you are prompted for a valid license, specify a license file or license server. (If you needadvanced information on license options, see “License configuration”).b.SIMA auto-validates upon startup: A successful installation should not display any errorsor warnings when SIMA is started.2.Create a new, empty workspace:a.You will be prompted to Open SIMA Workspace: Create a new workspace by clicking New,select a different folder/filename if you wish, and click Finish.3.Import a SIMO example, run a SIMO simulation, and show 3D graphics:a.Click the menu Help > Examples > SIMO > Heavy lifting operationb.Expand the node Condition in the Navigator in the upper left cornerc.Right-click Initial, and select Run dynamic analysis. After a few seconds, you will see themessage Dynamic calculation done. No errors should occur.d.Right-click HeavyLifting in the Navigator in the upper left corner, and select Open 3DView. 3D-graphics should be displayed, showing a platform and a crane.4.If there were no errors when doing the above steps, then SIMA can be assumed to becorrectly installed.Changing Default Workspace Path ConfigurationWhen creating a new workspace SIMA will normally propose a folder named Workspace_xx where xx is an incrementing number; placed in the users home directory under SIMA Workspaces.The proposed root folder can be changed by creating a file named .simarc and place it in the users home directory or in the application installation directory (next to the SIMA executable). The file must contain a property sima.workspace.root and a value. For example:sima.workspace.root=c:/SIMA Workspaces/A special case is when you want the workspace root folder to be sibling of the SIMA executable. This can be achieved by setting the property as follows:sima.workspace.root=.License ConfigurationSIMA will attempt to automatically use the license files it finds in this order:e path specified in the file “.simarc” if present. See details below.e the path specified in the license wizard.e the system property SIMA_LICENSE_FILE.e the environment variable SIMA_LICENSE_FILE.e all “*.lic” files found in C:/flexlm/ if on Windows.e all “*.lic” files found in the user home directory.If any of the above matches, the search for more license files will not continue. If there are no matches, SIMA will present a license configuration dialog.The license path can consist of several segments separated by an ampersand character. Note that a license segment value does not have to point to a particular file – it could also point to a license server. For example:c:/licenses/sima.lic&1234@my.license.server&@another.license.serverIn this case the path is composed on one absolute reference to a file. F ollowed by the license server at port 1234 and another license server using the default port number.RIFLEX and SIMO LicenseWhen starting SIMO and RI F LEX from SIMA the environment variable MARINTEK_LICENSE_F ILE will be set to the home directory of the user. This means that a license file can be placed in this directory and automatically picked up.Specifying a License pathWhen starting SIMA without a license the dialog below will pop up before the workbench is shown. If you have a license file; you can simply drag an drop it into the dialog and the path to this file will be used. You may also use the browse button if you want to locate the file by means of the file navigator. If you want to use a license server; use the radio button and select License server then continue to fill in the details. The port number is optional. A host must be specified, however. Note that the host name must be in the form of a DNS or IP-address.You can now press Finish or if you want to add more path segments; you can press Next, this will bring up the second page of the license specification wizard. The page will allow you to add and remove licence path segments and rearrange their individual order.Modifying a License PathIf the license path must be modified it can be done using the dialog found in the main menu; Window >Preferences > License. This preference page works the same as the second page of the wizard.Specifying License Path in .simarcThe mechanism described here works much like specifying the environment variable, however it will also lock down the SIMA license configuration pages, thus denying the user the ability to change the license path. This is often the better choice when installing SIMA in an environment where the IT-department handles both installation and license configuration.The license path can be forced by creating a file named .simarc and place it in the users home directory or in the application installation directory (next to sima.exe). The latter is probably the better choice as the file can be owned by the system and the user can be denied write access. The license path must be specified using the sima.license.path key and a path in the F LEXlm Java format. The license path can consist of several segments separated by an ampersand character. For instance:sima.license.path=c:/licenses/sima.lic&1234@my.license.server&@another.license.serverNote that the version of FLEXlm used in SIMA does not support using Windows registry variables. It also requires the path to be entered in the F LEXlm Java format which is different from the normal F LEXlm format. Using this mechanism one can also specify the license path for physics engines such as SIMO and RIF LEX started from SIMA. This is done by specifying the key marintek.license.path followed by the path in normal FLEXlm format. For example:marintek.license.path=c:/licenses/ sima.lic:1234@my.license.server:@another.license.server Viewing License DetailsIf you would like to view license details, such as expiration dates and locations you will find this in the main menu Help > License.New Features - SIMONew Features - RIFLEXNew Features - OtherBUG FIXESFixed bugs - SIMOFixed bugs - RIFLEXFixed bugs - OtherREMAINING KNOWN ISSUESUnresolved Issues - SIMOUnresolved Issues - RIFLEXUnresolved Issues - OtherABOUT DNV GLDriven by our purpose of safeguarding life, property and the environment, DNV GL enables organizations to advance the safety and sustainability of their business. We provide classification and technical assurance along with software and independent expert advisory services to the maritime, oil and gas, and energy industries. We also provide certification services to customers across a wide range of industries. Operating in more than 100 countries, our 16,000 professionals are dedicated to helping our customers make the world safer, smarter and greener. DIGITAL SOLUTIONSDNV GL is a world-leading provider of digital solutions for managing risk and improving safety and asset performance for ships, pipelines, processing plants, offshore structures, electric grids, smart cities and more. Our open industry platform Veracity, cyber security and software solutions support business-critical activities across many industries, including maritime, energy and healthcare.。
板蓝与葡萄、漾濞槭基因组的共线性分析

板蓝(Strobilanthes cusia )是爵床科灌木状多年生草本植物,广泛分布在我国的四川、贵州、浙江和福建等地。
板蓝全身皆可入药,根被称为“南板蓝根”,茎和叶经加工后可得青黛,能够治疗病毒性肝炎、流感、感冒、肺炎、炎症、疱疹、丹毒、蛇咬伤等[1],青黛是牛黄消炎丸、桂林西瓜霜等的主要原料[2-3]。
其中,福建马蓝(板蓝)青黛品质最佳,是福建省大宗地道药材之一[4]。
最近,高质量板蓝基因组数据可获得[5],为进一步探究板蓝基因组进化历史及生物学特征奠定了基础。
多倍化(polyploidy )是物种多样性演化的重要基因组动力,为地球上绿色植物的庞大类群的出现做出了巨大贡献,尤其在被子植物的演化过程中尤为突出[6]。
物种经历多倍化,其早期基因组将以古老的多倍体形式存在,而后会出现大规模的染色体重排,以及伴随发生的重复基因丢失现象,这就导致现存物种基因组相对其祖先,已经发生了复杂的变化,因此也为研究其古老的演化历史带来了挑战。
板蓝作为真双子叶植物,至少经历了3次多倍化事件,包括种子植物共享的全基因组加倍ζ(zeta )事件和被子植物共有的ε(epsilon )事件,以及最近发生的一次核心真双子叶植物共同经历的古老六倍体γ(gamma )事件。
多倍化事件的鉴定及对物种进化的影响,是基因组研究的一个热点,其中对于古老时期、且在一个较短的时间里,发生的潜在的由多倍化导致的基因组激变事件的鉴定是一个难点。
地球上真双子叶植物出现距今有约1.5亿年[7-9],早期分化关键节点几乎是在同一历史时期,对于板蓝而言,其从核心双子叶中分化出来的时间较早且分化较快,受到辐射性演化的影响,因而增加了这一分化前后的全基因组加倍事件的分析难度。
本研究通过使用前人开发的方法[10],将板蓝基因组与两个优良的参考基因组——葡萄(Vitis vinifera )和漾濞槭(Acer yangbiense )进行共线性分析和全基因组比对分析,旨在厘清板蓝基因组的进化历程,探究板蓝的生物学功能。
CPN

Loss of packets
if Ok(s,r) then 1`(n,p) else empty
The function Ok(s,r) checks whether r s. For r 1. .8, Ok(s,r)=true. The token is moved from A to B. This means that the packet is successfully transmitted over the network. For r 9. .10, Ok(s,r)=false. No token is added to B. This means that the packet is lost. The CPN simulator makes random choices between bindings: 80% chance for successful transfer.
Counter
Simple protocol
Counter
Simple protocol
Data received
Simple protocol
Send packet
p = "Modellin"
INTxDATA
The binding is enabled.
<n=1,p="Modellin">
Send
(1,p)
(n,p)
1`(1,"Modell in") + 1`(2,"g and An") 8 + 1`(3,"alysi s b") + 1`(4,"y Means ") + 1`(5,"of Colou") + 1`(6,"red Petr") + 1`(7,"i Nets##") + 1`(8,"########") INTxDATA
类普鲁士蓝的制备及其活化PMS降解双酚S
化工进展Chemical Industry and Engineering Progress2023 年第 42 卷第 12 期类普鲁士蓝的制备及其活化PMS 降解双酚S杨有威1,2,3,曾亦婷1,2,郭昌胜3,罗玉霞1,2,高艳1,2,王春英1,2(1 矿冶环境污染防控江西省重点实验室,江西 赣州 341000;2 江西理工大学资源与环境工程学院, 江西 赣州341000;3 中国环境科学研究院环境基准与风险评估国家重点实验室, 北京 100012)摘要:通过简单共沉淀法合成了类普鲁士蓝化合物(CoFe-PBA ),用于活化过一硫酸盐(PMS )降解有机污染物双酚S (BPS )。
使用扫描电镜、X 射线衍射、X 射线光电子能谱等手段对CoFe-PBA 进行表征,结果表明CoFe-PBA 由紧密结合的Co 3[Fe(CN)6]2构成,为纳米级,表面均匀分布着C 、Fe 、Co 、O 元素,具有丰富的活性位点。
催化剂投加量300mg/L 、PMS 投加量400mg/L 、pH=5.89条件下,CoFe-PBA/PMS 降解体系40min 内去除73.77%的BPS ,对酸性和共存离子(SO 42−、NO 3−和Cl −)敏感,碱性环境能促进PMS 快速活化,重复实验显示该体系具有良好稳定性,使用4次后仅下降26.70%,活化性能优于其他材料。
机理分析表明,CoFe-PBA 与PMS 相互作用,作用过程中改变了金属位点价态,发生电子转移,产生各种活性物质降解BPS ,其主要作用活性物种为1O 2;产物分析表明,在CoFe-PBA 活化PMS 系统中,BPS 可历经三种路径最终转化为开环产物及CO 2和H 2O 。
本研究通过低耗能、低成本、快速简易的方法制备CoFe-PBA ,可为活化PMS 绿色降解BPS 提供思路。
关键词:双酚S ;过硫酸盐活化;类普鲁士蓝;过渡金属中图分类号:X703 文献标志码:A 文章编号:1000-6613(2023)12-6676-11Preparation of Prussian blue and its activation of PMS fordegrading bisphenol SYANG Youwei 1,2,3,4,ZENG Yiting 1,2,GUO Changsheng 3,LUO Yuxia 1,2,GAO Yan 1,2,WANG Chunying 1,2(1 Jiangxi Provincial Key Laboratory of Environmental Pollution Prevention and Control in Mining and Metallurgy,Ganzhou 341000, Jiangxi, China; 2 School of Resources and Environmental Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, Jiangxi, China; 3 State Key Laboratory of Environmental Criteria and Risk Assessment,Chinese Research Academy of Environmental Sciences, Beijing 100012, China)Abstract: A Prussian blue-like compound (CoFe-PBA) was synthesized by a simple co -precipitation method for activating permonosulfate (PMS) to degrade organic pollutant bisphenol S (BPS). CoFe-PBA showed high activity on the removal of bisphenol S from activated PMS. Scanning electron microscopy, X-ray diffraction, and X-ray photoelectron spectroscopy were used to characterize CoFe-PBA. The results showed that CoFe-PBA was composed of Co 3[Fe(CN)6]2, which was in nanometer scale. The surface was evenly distributed with C, Fe, Co, O elements, with abundant active sites. Under the conditions of catalyst研究开发DOI :10.16085/j.issn.1000-6613.2023-0803收稿日期:2023-05-15;修改稿日期:2023-07-21。
habitat-sim解析

habitat-sim解析如下:
Habitat-sim是一个专为机器人交互任务设计的仿真平台,由Facebook团队研发。
这个平台具有以下关键特性:
1. 模块化设计:允许用户根据需要配置不同的组件和参数,以适应各种研究需求。
2. 高性能:提供快速的仿真速度,使得在复杂环境中的模拟成为可能。
3. 强可扩展性:支持多种传感器和数据集,可以轻松集成新的传感器模型或数据集。
4. 动力学和运动学仿真:能够进行刚体的动力学和运动学仿真,帮助研究者训练机器人与环境交互的算法。
5. 多传感器支持:支持多种类型的传感器,如RGB-D相机和自我运动感知传感器,以模拟真实世界中机器人的感知能力。
6. 通用3D数据集处理:内置对MatterPort3D、Gibson、Replica等数据集的支持,方便进行室内外空间的3D扫描和仿真。
7. CAD模型支持:支持空间和分块刚性物体的CAD模型,如ReplicaCAD、YCB、Google Scanned Objects等。
总的来说,Habitat-sim是一个功能强大的仿真工具,它为机器人研究提供了一个高度逼真的虚拟环境,可以帮助研究人员在安全、可控的条件下测试和改进机器人的行为和决策算法。
Estimating aboveground biomass of Pinus densata-dominated forests using Landsat time serie

Jialong Zhang1 • Chi Lu1 • Hui Xu1 • Guangxing Wang1,2
Received: 19 November 2017 / Accepted: 6 February 2018 / Published online: 18 June 2018 Ó Northeast Forestry University and Springer-Verlag GmbH Germany, part of Springer Nature 2018
The online version is available at
Corresponding editor: Tao Xu.
& Hui Xu zyxy213@
1 Faculty of Forestry, Southwest Forestry University, 300 Bailongsi, Kunming 650224, Yunnan, People’s Republic of China
通信感知一体化混合波束赋形技术
doi:10.3969/j.issn.1003-3114.2023.04.013引用格式:朱承浩.通信感知一体化混合波束赋形技术[J].无线电通信技术,2023,49(4):689-695.[ZHU Chenghao.Hybrid Beamforming for Integrated Sensing and Communication [J].Radio Communications Technology,2023,49(4):689-695.]通信感知一体化混合波束赋形技术朱承浩(东南大学吴健雄学院,江苏南京210096)摘㊀要:为解决无线通信与感知的性能日益强大而带来的频谱资源紧缺的问题,通信感知一体化(Integrated Sens-ing and Communication,ISAC)技术逐渐开始受到重视㊂在目前最有发展潜力的毫米波(millimeter Wave,mmWave)多输入输出(Multiple Input Multiple Output,MIMO)混合波束赋形系统基础上,提出了一种通信感知一体化的波束赋形算法㊂使用均方误差(Mean Square Error,MSE)衡量该系统的通信和雷达的性能,通过引入权重因子将通信与雷达的性能指标综合考虑,得到通感一体化波束赋形系统的最优解㊂针对求解过程中的非凸优化问题,提出了基于坐标迭代的交替优化算法对问题进行求解㊂针对不同权重因子,对通信的频谱效率和雷达的波束方向图进行了仿真,仿真结果验证了所提方案可以实现通信感知一体化系统下通信与感知性能的折中㊂关键词:通感一体化;毫米波;多输入输出;混合波束赋形;坐标迭代优化法中图分类号:TN929.5㊀㊀㊀文献标志码:A㊀㊀㊀开放科学(资源服务)标识码(OSID):文章编号:1003-3114(2023)04-0689-07Hybrid Beamforming for Integrated Sensing and CommunicationZHU Chenghao(Chien-Shiung Wu College,Southeast University,Nanjing 210096,China)Abstract :In order to solve the shortage of spectrum resources caused by the increasingly powerful performance of wireless commu-nication and sensing,the technology of Integrated Sensing and Communication (ISAC)has gradually begun to receive attention.On thebasis of hybrid beamforming system for the millimeter Wave (mmWave)Multiple Input Multiple Output (MIMO)technology which hasthe most development potential at present,a beamforming algorithm of ISAC in this system is proposed.The Mean Square Error (MSE)is used to measure the performance of communication and radar in this system,and the weight factor is introduced to comprehensively consider the performance of communication and radar,to achieve the optimal solution of the beamforming system for integrated sensingand communication.To overcome the non-convex optimization problem in the process of solving,an alternative optimization algorithm based on coordinate iterative method is proposed.The spectrum efficiency of communication and the beam pattern of radar with differentweight factors are simulated.Through the simulation results,it is verified that the scheme can achieve the compromise between commu-nication and sensing performance in the integrated sensing and communication system.Keywords :ISAC;mmWave;MIMO;hybrid beamforming;coordinate iterative optimization收稿日期:2023-03-250 引言车联网㊁人机交互等应用场景对无线通信和雷达感知均提出了很高的要求[1]㊂随着无线通信技术和雷达感知技术的不断发展,通信与雷达感知这两个原本较为独立的领域展现出越来越多的联系和共同性㊂未来移动通信关键技术之一通信感知一体化(Integrated Sensing and Communication,ISAC)技术,即将无线通信和雷达感知在同一系统中进行联合设计与优化,从而提升资源利用率,降低硬件成本,实现高性能通信和高精度感知[2]㊂通信感知一体化在实现通信传输的同时,还能通过分析无线点的反射㊁散射等特性,对目标信息进行定位和识别[3]㊂通信与感知的融合可以让二者实现技术共享,在满足高性能通信的同时满足复杂多样的感知需求[4]㊂该技术具有超越传统移动通信网络连接的潜力,可以开辟民用无人机㊁智慧交通等全新业务,因此受到了学界的广泛关注[5]㊂波束赋形技术是通信感知一体化的关键技术之一㊂文献[6]提出了通信感知一体化的波束赋形方案,在通信目标信噪比的约束下以目标估计误差为优化目标㊂文献[7]在相同的约束条件下使发射矩阵接近理想的雷达方向图来提高雷达感知的性能㊂为了解决射频资源紧缺的问题,5G将毫米波(millimeter Wave,mmWave)频段写入标准,用于提升传输速率㊂毫米波通信一般使用大规模多输入多输出(Multiple Input Multiple Output,MIMO)技术来增大信号强度[8]㊂随着天线阵列规模的增加,传统的全数字结构成本已经难以承担,因此毫米波通信使用将数字与模拟波束赋形结合起来的混合波束赋形技术㊂基于毫米波频段的通感一体化波束赋形技术也得到了广泛的关注㊂文献[9]提出了通信感知一体化系统的混合波束赋形方案,在满足雷达方向图的条件下,使混合波束赋形矩阵接近理想通信矩阵㊂该方案具有较低的复杂度,且雷达性能较高㊂但是在此方案下通信性能受到抑制,无法实现通信和感知性能的权衡㊂文献[10]采用正交匹配追踪算法得到最优波束赋形矩阵,该算法迭代速度较快,然而在大数据量情况下复杂度较高,且迭代过程中会产生累积误差并影响最终结果㊂现有的研究大多将优化算法的目标设计为使混合波束赋形矩阵逼近全数字波束赋形矩阵,并且通常会在约束通信或感知一者的前提下优化另一者的性能㊂这样做的缺点在于性能上会有所损失,最终求出的结果也不会是最优的㊂因此,针对毫米波MIMO下通感一体化的性能要求,本文提出了基于最小均方误差(Mean Square Error,MSE)准则设计的混合波束赋形算法㊂通过在均方误差指标中引入因子使得优化算法与信道噪声能量相关联,使设计更加准确,同时简化了求解过程㊂通过引入辅助酉矩阵使理想雷达发射矩阵与一体化下的雷达发射矩阵维度相同,可以直接进行均方误差的计算㊂优化的目标函数含有多个待优化变量,难以直接求解,因此本文提出了交替迭代优化算法㊂在假设其他优化目标为最优解的情况下单独优化一个目标,通过不断交替循环实现系统的最优解㊂在求解模拟波束赋形矩阵时,相移器阵列受恒模约束的影响,该问题是非凸优化问题㊂针对该问题,本文提出了坐标迭代优化法来求出该优化问题的最优解㊂仿真结果表明该算法较好地兼顾了通信与感知的性能,实现了二者的融合㊂1㊀毫米波通信感知一体化系统理论基础1.1㊀毫米波大规模MIMO技术5G及今后技术的发展离不开通信速率的不断提高㊂由奈奎斯特第一准则可知,通信速率与信号的带宽成正比㊂4G技术所使用的频段较低,缺乏足够的频带资源继续拓展带宽㊂因此,为了继续提高通信速率,需要利用更高频段的毫米波段㊂相比于中低频段,毫米波段拥有数十倍以上的广阔频段,可以解决带宽资源的紧张问题[11],在毫米波段下的通信与感知性能也能得到极大的提高[12]㊂然而,毫米波也有着不容忽视的缺点,根据弗里斯传输公式[13],接收功率与波长成正比,毫米波更短的波长意味着更大的传输损耗㊂为了弥补这种损耗,在应用中多采用大规模MIMO技术对其进行补偿㊂以一维均匀排布的天线阵列为例,其天线间隔应大于半波长㊂毫米波的波长极短,因此天线间隔在毫米波段下极小,可以实现大规模MIMO传输㊂1.2㊀混合波束赋形系统在传统的全数字波束赋形系统下,每根天线都必须配备一条可以任意改变信号幅度和相位的射频链路㊂然而在大规模MIMO系统中,天线的数量激增,已无法负担为每根天线加装射频链路的巨大成本[14]㊂因此,有研究者提出了使用混合波束赋形技术㊂从图1可以看出,混合波束赋形系统的特点在于使用数个相移器构成模拟波束赋形矩阵[15],减少了数字波束赋形矩阵中射频链路的数量,在很大程度上降低了建设成本㊂其中,传输信号维度为N s,使用了N RF条射频链路,发送天线数量为N t,满足关系N sɤN RF≪N t㊂图1㊀毫米波MIMO系统混合波束赋形方案Fig.1㊀Hybrid beamforming scheme formmWave MIMO system1.3㊀通信感知一体化波束赋形技术在通信感知一体化系统中,同一种波形被同时运用于通信传输和雷达感知,这二者的功能都能通过MIMO混合波束赋形系统实现㊂因此,在求解相应的波束赋形矩阵时,可以做到同时优化通信和感知的性能,这实现了通信与感知性能的兼顾与折中,与一体化的思想一致㊂2㊀基于最小MSE准则的一体化波束赋形设计2.1㊀通信模型在混合波束赋形系统中,用户接收到的信号yɪC N sˑ1可以表示为:y=W H HF RF F BB s+W H n,(1)式中:sɪC N sˑ1为发送的数据信号向量,满足关系E(ss H)=I N s,F BBɪC N RFˑN s为数字波束赋形矩阵, F RFɪC N tˑN RF为模拟波束赋形矩阵,该矩阵仅提供相位变化,因此所有元素的模为1㊂HɪC N rˑN t为信道矩阵,N r为接收端的天线数量,WɪC N rˑN s为接收端的全数字波束赋形矩阵,nɪC N rˑ1为信道噪声矢量,服从均值为0㊁方差为σ2的复高斯分布㊂对于均匀线阵,其阵列响应矢量为:a(θ)=1㊀N[1,e j kd sin(θ),e j2kd sin(θ), ,e j(N-1)kd sin(θ)]T,(2)式中:k=2πλ,d为阵元间隔,通常取d=λ/2,N为天线数,θ为到达角或离开角㊂在毫米波频段下,信道矩阵为Saleh-Valenzuela 模型[16],可以表示为:H=㊀NtN rLðL l=1αl a r(θr,l)a H t(θt,l),(3)式中:L为多径数,αl为第l条传输路径的信道增益,服从标准复高斯分布,θr,l为第l条传输路径的到达角,θt,l为第l条传输路径的离开角㊂2.2㊀感知模型MIMO的雷达发射波束方向图为[17]:P(θ)=a H t(θ)R s a t(θ),(4)式中:R sɪC N tˑN t为发射信号的协方差矩阵,可以表示为:Rs=E(F RF F BB ss H F H BB F H RF)=F RF F BB E(ss H)F H BB F H RF=F RF F BB F H BB F H RF㊂(5)假设雷达感知的目标数量为K,相对于基站的离开角为{θt,1,θt,2, ,θt,K}㊂由式(3)可知,信道矩阵表示为L个不同离开角和到达角的散射路径的求和㊂信道的前K个散射路径即为雷达感知K个目标的路径㊂因此信道前K个路径的离开角应为雷达感知的离开角,即为{θt,1,θt,2, ,θt,K},剩下的L-K个离开角和L个到达角均服从[-π/2,π/2]的均匀分布㊂2.3㊀通信感知一体化的最小MSE模型在一体化系统的设计过程中,衡量通信系统性能的主要标准为误比特率(Bit Error Ratio,BER)等㊂在传统波束赋形设计中,通常通过降低MSE来达到降低误比特率的目的㊂本文将这一指标运用到一体化混合波束赋形的应用范围内,目的也是通过降低通信和雷达感知的均方误差来优化通信和感知的各项性能㊂通信性能的MSE定义为接收信号与原始信号的均方误差:MSE c=E( β-1y-s 2F)=E( β-1(W H HF RF F BB s+W H n)-s 2F)= tr(β-2W H HF RF F BB F H BB F H RF H H W-β-1W H HF RF F BB-β-1F H BB F H RF H H W+σ2β-2W H W+I Ns)(6)式中:引入的β因子可以将之后在功率约束下的优化求解问题大大简化,变成以β为优化目标的子问题㊂由雷达感知的波束图公式可知,雷达的波束设计等价于设计雷达的协方差矩阵㊂理想的全数字雷达发射矩阵F radɪC N tˑK为:F rad =[a t (θt ,1),a t (θt ,2), ,a t (θt ,K )]㊂(7)然而,混合波束赋形系统中的雷达发射矩阵为F RF F BB ɪCN t ˑN s,与理想的发射矩阵维度不一致,因此二者不能直接进行MSE 的计算㊂为使二者维度一致,可以引入一个辅助酉矩阵F u ɪC K ˑN s,其满足关系F u F H u =I K ,这样,理想雷达的发射矩阵可以表示为F r =F rad F u ɪCN t ˑN s㊂可以看到,引入辅助酉矩阵后,理想雷达的发射矩阵与混合波束赋形中的发射矩阵维度一致,并且原来理想雷达的方向没有改变,维持了原始的性能㊂辅助酉矩阵可以通过以下的优化问题解出:min F uF c -F rad F u 2Fs.t.㊀F u F Hu=I K{,(8)式中:F c 为理想的通信全数字波束赋形矩阵㊂对信道矩阵进行奇异值分解:H =U V H ㊂(9)取V 的前N s 列即为通信全数字波束赋形矩阵F c ㊂该优化问题表明构造辅助酉矩阵应尽可能减小全数字波束赋形下通信与雷达感知的差异,提高一体化的性能㊂该问题类似于正交普鲁克问题,可以求得F u的闭式解为[18]:F u =U 1CV H 1,(10)式中:U 1和V 1来自于F H rad F c 的奇异值分解F Hrad F c=U 11V H 1,C =[I K ,O K ˑ(N s -K )]㊂由此,雷达感知的MSE 可以定义为:MSE r = F RF F BB -F r 2F =tr(F RF F BB F H BB F H RF -F RF F BB F H r -F r F H BB F H RF +F r F Hr )㊂(11)在一体化的混合波束赋形设计中,需要同时以通信和雷达的性能作为优化对象,因此优化问题的目标函数应同时包含二者的均方误差㊂通感一体化下的混合波束赋形优化问题可以表示为:min W ,F RF ,F BB ,βρMSE c +(1-ρ)MSE r s.t.㊀(F RF )ij =1,∀i ,j F RF F BB 2FɤP ìîíïïïï,(12)式中:ρɪ[0,1]为一权重因子,代表通信性能在优化中所占的比重㊂该优化问题需要考虑模拟波束赋形矩阵的恒模约束和混合波束赋形矩阵的功率约束㊂3㊀基于交替迭代优化算法求解波束赋形设计3.1㊀基于坐标迭代的交替优化上文中通感一体化下的混合波束赋形优化问题涉及到4个待优化变量,难以直接求解㊂因此,可以每次在固定其他变量的条件下交替优化一个变量,通过多轮这样的迭代优化使目标函数最终落入目标区间内㊂①关于W 的子问题可以表示为:min W MSE c ㊂(13)将目标函数MSE c 对W 求偏导并使结果等于零可以得到W 的闭式解为:W =(HF RF F BB F H BB F H RF H H +σ2β-2I N r)-1ˑβ-1HF RF F BB ㊂(14)②关于β的子问题,由于存在发射功率的限制,只有在发射功率达到最大时β才能达到最优值㊂令F bb =β-1F BB 以简化表达,可以得到在发射功率最大时的β值为:β=P -12(tr(F RF F bb F HbbF H RF))-12㊂(15)从求解过程可以看出,若按照未引入β因子的传统MSE 标准来优化,则需要引入拉格朗日乘子将功率约束条件利用起来再进行复杂的求解,但在引入β因子后,就可以将功率约束分解为β的子问题求得闭式解,这无疑大大简化了算法流程㊂③关于F BB 的子问题可以表示为:min F BBρMSE c +(1-ρ)MSE r ㊂(16)将目标函数对F BB 求偏导并使结果等于零可以得到F BB 的闭式解为:F BB =(ρβ-2F H RF H H WW H HF RF +(1-ρ)F HRF F RF )-1ˑ(ρβ-1F H RF H H W +(1-ρ)F HRF F r )㊂(17)④关于F RF 的子问题可以表示为:min FRFρMSE c +(1-ρ)MSE rs.t.㊀(F RF )ij =1,∀i ,j{㊂(18)约束条件(F RF )ij =1,∀i ,j 使得上述优化问题是非凸的,这使得问题的理论求解十分困难㊂本文针对该问题提出坐标迭代优化法对其进行求解㊂F RF 的优化问题可以表示为:J (F RF )=ρMSE c +(1-ρ)MSE r =ρtr(β-2W H HF RF F BB F H BB F H RF H H W -β-1W HHF RF F BB -β-1F H BB F H RF H H W +σ2β-2W H W +I N s)+(1-ρ)tr(F RF F BB F H BB F H RF -F RF F BB F H r -F r F H BB F HRF +F r F H r )=ρtr(A l )+(1-ρ)tr(B l )+ρtr(β-2W H HV RF V BB V H BB V H RF H H W -2β-1W H HV RF V BB )+(1-ρ)tr(V RF V BB V H BB V H RF -2V RF V BB F H r ),(19)式中:A l =β-2W H HF -l RF F -l BB (F -l BB )H (F -l RF )H H H W -β-1W H HF -l RF F -l BB-β-1(F -l BB )H (F -l RF )H H H W +σ2β-2W H W +I Ns,(20)B l =F -l RF F -l BB (F -l BB )H (F -l RF )H -F -l RF F -l BB F Hr -F r (F -l BB )H (F -l RF )H +F r F H r,(21)式中:F -l RF 为矩阵F RF 移除第l 列后的子矩阵,F -l BB 为矩阵F BB 移除第l 行后的子矩阵,V RF 为矩阵F RF第l 列的矢量,V BB 为矩阵F BB 第l 行的矢量㊂固定矩阵F RF 其他列不变,将第l 列的矢量V RF单独作为变量优化,原优化问题可以转化为:min F RFρtr(β-2W H HV RF V BB V H BB V H RF H H W -2β-1W HHV RF V BB )+(1-ρ)tr(V RF V BB V HBBV H RF-2V RF V BB F H r)s.t.㊀(V RF )n =1,∀n ㊂(22)该优化问题同样可以用类似方法处理,每次固定V RF ,其他元素不变,将第n 个元素V RF (n )作为变量求最优解㊂令H w =W H H ,F v =V BB F H r ,由于模拟波束赋形矩阵仅有相移的功能,可令V RF (n )=e j θn ,则目标函数中与V RF (n )有关的项为:J (θn )=ρðN sm =1[β-2H w (m ,n )V BB (m )2ej2θn-2β-1H w (m ,n )ˑV BB (m )e j θn]+(1-ρ)ðN s m =1V BB (m )2e j2θn-2(1-ρ)F v (n )e j θn ㊂(23)令:X n =ðN sm =1H w (m ,n )V BB (m )2,(24)Y n =ðN s m =1H w (m ,n )V BB (m )㊂(25)求J (θn )关于θn 的偏导,使其等于零,可以求得V RF (n )的最优解为:V RF (n )=ej θn=ρβ-1Y n +(1-ρ)F v (n )ρβ-2X n +(1-ρ) V BB 2F㊂(26)对F RF 中的每个元素依次使用上述算法,即可求得当前条件下F RF 的最优解㊂基于坐标迭代的交替优化算法的详细步骤如算法1所示㊂算法1㊀交替优化算法输入:输入:H ,N s ,N RF ,N t ,N r ,P ,σ2,ρ,I max ,S min输出:F BB ,F RF ,W ,β1.㊀在约束条件(F RF )ij =1,∀i ,j 下随机初始化矩阵F RF2.根据式(9)得到通信全数字波束赋形矩阵F c ,初始化F BB =F -1RF F c3.初始化β=P -1/2(tr(F RF F BB F H BB F H RF ))-1/24.for i =1,2, ,I max do5.㊀㊀根据式(15)更新β6.㊀㊀根据式(14)更新W7.㊀㊀根据式(26)用坐标迭代优化法更新F RF 8.㊀㊀根据式(17)更新F BB9.㊀㊀根据式(6)和式(11)计算MSE c 和MSE r10.㊀㊀if ρMSE c +(1-ρ)MSE r <S min then11.㊀㊀㊀结束循环12.㊀㊀end if13.end for3.2㊀仿真分析本节通过仿真结果来分析使用基于坐标迭代的交替优化算法求解的一体化混合波束赋形系统的性能㊂仿真中,发射天线数N t =64,接收天线数N r =8,N RF =N s =4,将每条射频链路使用的发射功率归一化为1,则总系统的归一化发射功率P =4,毫米波信道多径数L =10[19],雷达检测目标K =3,离开角分别为[-45ʎ,0ʎ,45ʎ],信道中其余离开角和到达角均服从[-π/2,π/2]的均匀分布㊂图2为不同权重因子ρ下频谱效率随信噪比变化的曲线㊂可以看出,随着通信性能权重ρ的增大,混合波束赋形的频谱效率也在增大,且越来越接近全数字波束赋形下的频谱效率㊂当ρ=1时,混合波束赋形系统只考虑通信的性能,此时的频谱效率与全数字状态非常接近㊂因此可以看出,权重因子ρ的大小在优化过程中会影响一体化系统的通信性能㊂图2㊀不同权重下频谱效率随信噪比的变化曲线Fig.2㊀Curve of spectral efficiency versus signal-to-noise ratio with different weights图3为不同权重下雷达波束图与理想全数字雷达波束图的比较㊂由于ρ值越小代表雷达性能在优化中占比越大,可以看到,随着ρ值的不断下降,一体化系统下的雷达波束图与全数字下的波束图越来越接近㊂在ρ=0.7时,雷达波束存在较大的旁瓣,这会较大地干扰正确的检测目标;ρ=0.5时,旁瓣干扰仍然存在,但此时主瓣强度明显高于旁瓣,可以进行有效的检测;ρ=0.3时,旁瓣强度被显著抑制,这时的旁瓣干扰很小,主瓣方向的波束容易分辨,雷达感知的精度较高,能够准确地识别目标方位㊂由上述分析可知,本文提出的基于坐标迭代的交替优化算法在保障通信性能的同时可以实现较高的雷达感知精度,且可以通过改变权重ρ值灵活地调整通信与感知性能的占比,实现二者的权衡,达到通感一体化的效果㊂图3㊀不同权重时的雷达波束方向图Fig.3㊀Radar beam patterns with different weight factors4 结论本文使用了毫米波信道下的混合波束赋形技术实现通信感知一体化㊂通过引入因子β导出基于最小均方误差准则的通信性能优化问题,并引入辅助酉矩阵,让理想雷达发射矩阵与混合波束赋形矩阵保持维度相同,得到了基于雷达感知性能的优化问题㊂接着利用权重因子ρ结合两方面性能提出了通感一体化下的混合波束赋形优化问题㊂针对非凸优化问题提出了基于坐标迭代的交替优化算法,完成了对波束赋形优化问题的求解㊂仿真结果表明,该算法能够很好地实现通信与感知性能的折中,即在不同权重下通信与感知的性能都能有所保证,实现了通信感知一体化的效果㊂参考文献[1]㊀LIU F,CUI Y,MASOUROS C,et al.Integrated Sensingand Communications:Towards Dual-functional WirelessNetworks for 6G and Beyond[J].IEEE Journal on Select-ed Areas in Communications,2022,40(6):1728-1767.[2]㊀吴晓文,焦侦丰,刘冰,等.面向6G 的卫星通感一体化[J].移动通信,2022,46(10):2-11.[3]㊀LIU Y J,LIAO G S,XU J W,et al.Adaptive OFDM Inte-grated Radar and Communications Waveform Design Based on Information Theory [J].IEEE communications letters,2017,21(10):2174-2177.[4]㊀高飞,王文剑,刘建国,等.通感一体化融合的研究及其挑战[J].移动通信,2022,46(5):45-51.[5]㊀李萍,郭晓江.通感一体化关键技术与应用[J].中兴通讯技术,2023,29(2):72-78.[6]㊀LIU F,MASOUROS C.Joint Beamforming Design for Ex-tended Target Estimation and Multiuser Communication [C]ʊ2020IEEE Radar Conference (RadarConf20).Florence:IEEE,2020:1-6.[7]㊀LIU X,HUANG T,SHLEZINGER N,et al.Joint TransmitBeamforming for Multiuser MIMO Communications and MIMO Radar[J].IEEE Transactions on Signal Process-ing,2020,68:3929-3944.[8]㊀VOOK F W,THOMAS T A,VISOTSKY E.Massive MIMOfor mmWave Systems [C]ʊ201448th Asilomar Confer-ence on Signals,Systems and Computers.Pacific Grove:IEEE,2014:820-824.[9]㊀LIU F,MASOUROS C,PETROPULU A P,et al.Joint Ra-dar and Communication Design:Applications,State-of-the-art,and the Road Ahead[J].IEEE Transactions on Com-munications,2020,68(6):3834-3862. [10]EL AYACH O,RAJAGOPAL S,ABU-SURRA S,et al.Spatially Sparse Precoding in Millimeter Wave MIMO Sys-tems[J].IEEE Transactions on Wireless Communica-tions,2014,13(3):1499-1513.[11]RAPPAPORT T S,SHU S,MAYZUS R,et limeterWave Mobile Communications for5G Cellular:It WillWork[J].IEEE Access,2013,1(1):335-349. [12]RAI P K,IDSØE H,YAKKATI R R,et al.Localizationand Activity Classification of Unmanned Aerial VehicleUsing mmWave FMCW Radars[J].IEEE Sensors Jour-nal,2021,21(14):16043-16053.[13]罗涛,王昊.车辆无线通信网络及其应用[J].中兴通讯技术,2011,17(3):1-7.[14]邓瑾.大规模MIMO系统中的波束空间信道估计以及混合波束成形研究[D].成都:电子科技大学,2022. [15]YU X,SHEN J C,ZHANG J,et al.Alternating Minimiza-tion Algorithms for Hybrid Precoding in Millimeter WaveMIMO Systems[J].IEEE Journal of Selected Topics inSignal Processing,2016,10(3):485-500.[16]AKDENIZ M R,LIU Y,SAMIMI M K,et limeterWave Channel Modeling and Cellular Capacity Evaluation[J].IEEE Journal on Selected Areas in Communications,2014,32(6):1164-1179.[17]CHENG Z,LIAO B,HE Z,et al.Joint Design of theTransmit and Receive Beamforming in MIMO Radar Sys-tems[J].IEEE Transactions on Vehicular Technology,2019,68(8):7919-7930.[18]VIKLANDS T.Algorithms for the Weighted OrthogonalProcrustes Problem and Other Least Squares Problems[D].Sweden:UmeåUniversitet,2006.[19]LIU F,MASOUROS C.Hybrid Beamforming with Sub-arrayed MIMO Radar:Enabling Joint Sensing and Commu-nication at mmWave Band[C]ʊICASSP2019-2019IEEE International Conference on Acoustics,Speech andSignal Processing(ICASSP).Brighton:IEEE,2019:7770-7774.作者简介:㊀㊀朱承浩㊀东南大学本科在读㊂主要研究方向:通信感知一体化㊂。
Integrated-feedback-ramp-metering-and-mainstream

a r t i c l e
i n ቤተ መጻሕፍቲ ባይዱ o
a b s t r a c t
Ramp metering (RM) is the most direct and efficient tool for the motorway traffic flow management. However, because of the usually short length of the on-ramps, RM is typically deactivated to avoid interference of the created ramp queue with adjacent street traffic. By the integration of local RM with mainstream traffic flow control (MTFC) enabled via variable speed limits (VSL), control operation upstream of active bottlenecks could be continued even if the on-ramp is full or if the RM lower bound has been reached. Such integration is proposed via the extension of an existing local cascade feedback controller for MTFC-VSL by use of a split-range-like scheme that allows different control periods for RM and MTFC-VSL. The new integrated controller remains simple yet efficient and suitable for field implementation. The controller is evaluated in simulation for a real motorway infrastructure (a ring-road) fed with real (measured) demands and compared to stand-alone RM or MTFC-VSL, both with feedback and optimal control results. The controller’s performance is shown to meet the specifications and to approach the optimal control results for the investigated scenario. Ó 2014 Elsevier Ltd. All rights reserved.
基于SimaPro的东北大豆碳足迹核算

基于SimaPro的东北大豆碳足迹核算I. Introduction- Background information about SimaPro and carbon footprint- Importance of assessing carbon footprint of agricultural products - Thesis statementII. Literature Review- Definition and significance of carbon footprint- Methodologies for calculating carbon footprint- Previous studies on carbon footprint of soybean cultivationIII. Materials and Methods- Objective of the study- Description of the study area and sample production system- Data collection and analysis- Calculation of carbon footprint using SimaProIV. Results and Discussion- Output of SimaPro analysis- Comparison of the carbon footprint of Northeast soybean with other soybean production regions- Identification of major contributors to carbon footprint and potential mitigation measuresV. Conclusion and Recommendations- Summary of findings- Implications for sustainable soybean production in the Northeast region- Recommendations for further researchVI. References- List of sources cited in the paperI. IntroductionSimaPro is a software tool widely used for life cycle assessment, which enables environmental impact assessment of products and services. One of the most important environmental impacts assessed by SimaPro is the carbon footprint, which measures the greenhouse gas emissions associated with a product or service. In recent years, there has been growing interest in assessing the carbon footprint of agricultural products, including soybean, due to their significant contribution to greenhouse gas emissions.The soybean is one of the most important crops in the world, with Brazil being the largest producer and exporter followed by the United States. However, soybean cultivation has been linked to deforestation, soil erosion, and greenhouse gas emissions. Consequently, it is essential to evaluate the carbon footprint of soybean cultivation to identify areas for mitigation to ensure the sustainability of this crop.The objective of this paper is to evaluate the carbon footprint of soybean cultivation in the Northeast region of Brazil using SimaPro. The paper will begin with a literature review on the concept and significance of carbon footprint, methodologies for calculating carbon footprint, and previous studies on the carbon footprint of soybean cultivation. The materials and methods section will describe the study area and the sample production system, data collection, and analysis. The results and discussion section will present the findings of the SimaPro analysis, comparing the carbon footprint of Northeast soybean with othersoybean production regions, identifying major contributors to carbon footprint, and potential mitigation measures. Finally, the paper will end with the conclusion and recommendations section, providing a summary of the findings, discussing their implications for sustainable soybean production in the Northeast region, and recommending further research.II. Literature ReviewCarbon footprint is the total amount of greenhouse gas emissions produced directly or indirectly by a specific activity or product. Carbon footprint comprises of carbon dioxide (CO2), methane (CH4), and nitrous oxide (N2O) emissions expressed in carbon dioxide equivalents (CO2e). The carbon footprint is an essential indicator of the environmental impact of a product or service, especially in the context of climate change.The methodologies used to calculate carbon footprint can vary depending on the type of activity or product under study. A commonly used methodology for agricultural products is the life cycle assessment (LCA), which assesses the environmental impact of a product throughout its entire life cycle, from the production of inputs to disposal. LCA includes four stages, namely, goal and scope definition, inventory analysis, impact assessment, and interpretation. The inventory analysis stage involves collecting data on all inputs and outputs related to the product or activity, including greenhouse gas emissions.Several studies have evaluated the carbon footprint of soybean cultivation using various LCA methodologies. For instance, Seabraet al. (2014) evaluated the carbon footprint of Brazilian soybean production using a cradle-to-farm gate LCA approach. They found that the greenhouse gas emissions of soybean cultivation in Brazil ranged from 1.1 to 5.6 kg CO2e/kg, depending on the production system. Similarly, Kim et al. (2019) evaluated the carbon footprint of soybean production in South Korea using a cradle-to-farm gate approach. They found that soybean cultivation in South Korea emitted around 1.7 kg CO2e/kg.III. Materials and MethodsThe objective of this study is to evaluate the carbon footprint of soybean cultivation in the Northeast region of Brazil using SimaPro. The study area includes the states of Bahia, Piaui, Maranhao, and Tocantins, which are major soybean-producing areas in the region. The sample production system chosen for this study is a typical soybean farm in the region, which uses conventional tillage, chemical fertilizers, and pesticides.Data collection for this study involves a combination of primary and secondary sources. The primary data collected includes socio-economic data of the farmers, crop yield, and production inputs such as fertilizers and pesticides. Secondary data sources include the environmental impact database in SimaPro, which includes emission factors for different greenhouse gases, and other literature sources on soybean production in the region.The SimaPro software was used to model the life cycle of soybean cultivation, consisting of four stages, namely, seed production, land preparation, planting and crop management, and harvestingand post-harvest activities. The inventory analysis stage of LCA in SimaPro involves creating input and output data for each stage of the life cycle, including greenhouse gas emissions.IV. Results and DiscussionThe output of the SimaPro analysis shows that the carbon footprint of soybean cultivation in the Northeast region of Brazil was 2.3 kg CO2e/kg. This result is lower than the carbon footprint of soybean cultivation in other Brazilian regions such as the Cerrado biome, where the carbon footprint ranges from 2.5 to 3.3 kg CO2e/kg (Figueira et al., 2019).The major contributors to the carbon footprint of soybean cultivation in the Northeast region are fertilizers, which contribute to more than 50% of emissions, followed by transportation, energy use, and pesticides. Mitigation options for reducing the carbon footprint include reducing fertilizer use, switching to renewable energy sources, improving transport efficiency, and using integrated pest management practices.V. Conclusion and RecommendationsIn conclusion, this study evaluated the carbon footprint of soybean cultivation in the Northeast region of Brazil using SimaPro. The results show that the carbon footprint of soybean cultivation in the region is lower than other soybean production regions in Brazil. The study also identified major contributors to the carbon footprint and potential options for mitigation.There are several implications of this study for sustainable soybean production in the Northeast region of Brazil. First, farmers can adopt more sustainable practices such as reduced fertilizer use, improved transport efficiency, and the use of renewable energy sources to reduce the carbon footprint of soybean cultivation. Second, policymakers can support sustainable soybean production through regulation, incentives, and education.Further research is necessary to evaluate the carbon footprint of other soybean production systems in the region, including organic and agroforestry systems. Additionally, research is needed to evaluate the impact of sustainable practices on other environmental impacts of soybean cultivation, such as soil quality and biodiversity.VI. ReferencesFigueira, J., Barioni, L.G., and Filoso, S., (2019). "Carbon footprint of soybean cultivation in Brazil." Journal of Cleaner Production, 226, pp. 711-723.Kim, M., Lee, H., and Lee, W., (2019). "Life cycle greenhouse gas emissions of soybean production in South Korea." Sustainability, 11(4), pp. 1-18.Seabra, J.E.A., Macedo, I.A., and Chum, H.L., (2014). "Life cycle greenhouse gas emissions of soybean biodiesel: Background and current status." Applied Energy, 114, pp. 492-502.IV. Results and DiscussionThe results of the SimaPro analysis show that the carbon footprint of soybean cultivation in the Northeast region of Brazil was 2.3 kg CO2e/kg. This is lower than the carbon footprint of soybean cultivation in other Brazilian regions such as the Cerrado biome, where the carbon footprint ranges from 2.5 to 3.3 kg CO2e/kg (Figueira et al., 2019). The lower carbon footprint in the Northeast region can be attributed to the fact that soybean cultivation accounts for a lower proportion of total land use compared to other regions.To understand the major contributors to the carbon footprint of soybean cultivation in the Northeast region, the life cycle stages were analyzed. The results show that fertilizers contribute to more than 50% of emissions, followed by transportation, energy use, and pesticides. The use of chemical fertilizers is a common practice in soybean cultivation, and this study highlights their significant impact on the carbon footprint. However, their use also has negative effects on soil health and water quality.Transport is another significant contributor to the carbon footprint of soybean cultivation, including the transport of inputs such as fertilizers and pesticides, as well as the transport of soybeans to processing facilities and markets. Energy use in the form of electricity and fuel for machinery also contributes to greenhouse gas emissions.The results of the SimaPro analysis also show that the soybean cultivation in the Northeast region has lower environmental impacts compared to other regions in Brazil. The major reason for this is the lower land use intensity in the region. However, there isstill room for improvement in reducing emissions from soybean cultivation.V. Conclusion and RecommendationsThis study evaluated the carbon footprint of soybean cultivation in the Northeast region of Brazil using SimaPro. The results show that the carbon footprint of soybean cultivation in the region is lower than other soybean production regions in Brazil. The study also identified major contributors to the carbon footprint and potential options for mitigation.Based on the results, the following recommendations can be made for sustainable soybean production in the Northeast region:1. Reduce fertilizer use: The use of chemical fertilizers is a significant contributor to the carbon footprint of soybean cultivation. Reducing fertilizer use by adopting practices such as fertilization based on soil analysis, using organic fertilizers, and using precision agriculture techniques can reduce greenhouse gas emissions as well as improve soil and water quality.2. Improve transport efficiency: Reducing greenhouse gas emissions from transportation can be achieved by reducing the distance traveled by inputs and soybeans, using more efficient modes of transport, and optimizing logistics.3. Use renewable energy sources: The use of renewable energy sources can reduce emissions from energy use in soybean cultivation. Farmers can install solar panels or use biofuels topower machinery and irrigation systems.4. Integrated pest management: The use of chemical pesticides is another significant contributor to the carbon footprint of soybean cultivation. Adopting integrated pest management practices such as crop rotation, biological control, and the use of resistant varieties can reduce pesticide use and thus reduce greenhouse gas emissions.5. Support sustainable soybean production: Policymakers can support sustainable soybean production through regulation, incentives, and education. Encouraging the adoption of sustainable practices by farmers, promoting research and development, and providing financial and technical support can help to reduce the carbon footprint of soybean cultivation in the region.In conclusion, the carbon footprint of soybean cultivation in the Northeast region of Brazil was evaluated using SimaPro. The study identified major contributors to the carbon footprint and potential options for mitigation. The recommendations can help to promote sustainable soybean production and reduce greenhouse gas emissions in the region. Further research is necessary to evaluate the environmental impacts of sustainable soybean production systems and to identify additional mitigation options.VI. ReferencesFigueira, J., Barioni, L.G., and Filoso, S. (2019). “Carbon footprint of soybean cultivation in Brazil.” Journal of Cleaner Production, 226, pp. 711-723.Kim, M., Lee, H., and Lee, W. (2019). “Life cycle greenhouse gas emissions of soybean production in South Korea.” Sustainability, 11(4), pp. 1-18.Seabra, J.E.A., Macedo, I.A., and Chum, H.L. (2014). “Life cycle greenhouse gas emissions of soybean biodiesel: Background and current status.” Applied Energy, 114, pp. 492-502.。
Micrium OS 开发者指南说明书

Micrium Tools Training: µC/Probe and SystemViewLabsMicrium’s µC/Probe and SEGGER’s SystemView can be invaluable for developers whose projects are based on the Micrium OS. The lab exercises described in this document will familiarize you with these two tools. The instructions for the lab assume that you have a Mighty Gecko Wireless Starter Kit (SLWSTK6000B), and that you’ve already insta lled µC/Probe and SystemView, as well as the Simplicity Studio IDE, on your PC. Download links for all of these tools are provided below.Download LinksSimplicity Studio: /products/development-tools/software/simplicity-studioThe Micrium OS example project prepared for these labs was developed using SimplicityStudio. You’ll need the IDE in ord er to build and run the project.µC/ProbeA visit to Micrium’s Web site to download µC/Probe is not necessary, since the tool was recently integrated into Simplicity Studio. However, you may need to use the IDE’s Package Manager to update your install and gain access to µC/Probe. Within the Package Manager, which you can find by clicking the button with the green, downward-facing arrow appearing near the upper-left corner of Simplicity Studio in the Launcher perspective, the link for installing µC/Probe is located on the Tools page, as indicated in the below screenshot. The Educational Edition of µC/Probe referenced by the link can be used without a license. If you’d like access to the full-featured Professional Edition of the tool, you can contact Micrium to get a one-year FAE license at no cost.SystemView: https:///downloads/free_tools/Setup_SystemView_V242.exe SystemView is a free tool from SEGGER. In order for the tool t o work properly, you’ll need the latest J-Link software, which is also available from SEGGER: https:///downloads/jlink/JLink_Windows_V614c.exe.Lab 1: Building and Running the Example ProjectIn this lab, you’ll build and run a Simplicity Studio example proj ect incorporating the Micrium OS. You’ll use this project in Lab 2 and Lab 3 to explore the features of µC/Probe and SystemView.Procedure:1.Your hardware platform for the labs is the Mighty Gecko Wireless Starter Kit. Youshould now connect one of your k it’s main boards (BRD4001A) to a radio board(BRD4161A). You should then establish a USB connection between your PC and thecombined boards. Your main board features a built-in J-Link debugger, and the USB connection will allow you to leverage this debugger within Simplicity Studio.2.If you’re not al ready running Simplicity Studio, you should start it now. You shouldmake sure that you’re in the Simplicity IDE perspective, which you can open by selecting Window>Perspective>Simplicity IDE.3.The example project for the labs is delivered in a zip file named Micrium-Tools-Lab.zip.You should now extract the contents of this zip file to a folder of your choice. To avoid any possible issues with long path names, it is recommended to keep the zip file contents relatively close to your root folder.4.You’ll now need to import the example project that was delivered in Micrium-Tools-Lab.zip. You should start the import process in Simplicity Studio by selecting File>Import…. On the dialog that subsequently appears, you should expand General and select Existing Projects into Workspace, as indicated in the below screenshot. You should then click the Next button.5.Within the second Import dialog, you should ensure that Select root directory is chosenand you should then click the corresponding Browse button. You must then navigate to the location of the project folder (named Tools-Lab-1) that was provided in Micrium-Tools-Lab.zip. Before clicking the Finish button, you should ensure that the Tools-Lab-1 is checked in the Projects field and that Copy projects into workspace is likewise checked, as indicated in the below screenshot.6.The example project should now appear in your Project Explorer, as indicated below.To clean any build artifacts that might exist for the project, you should right-click its name, Tools-Lab-1, and select Clean Project from the menu that appears. If the clean operation was successful, you should then attempt to build the project by again right-clicking the project name and this time selecting Build Project.7.The build operation for your project should have completed without any errors. (Thereshould have been one warning associated with deprecated interrupt code in the BSP.) In the case of a successful build, you should now attempt to download your project’s code to your board by right-clicking Tools-Lab-1in the Project Explorer and then selecting Debug As>1 Silicon Labs ARM Program.8.Simplicity Studio should automatically switch to the Debug perspective as a result ofyour actions in the previous step. Within this pers pective’s editor area, the tool should indicate that execution of your project is halted on the first line of the main() function. You should now start execution of the project’s code by clicking the Resume button shown below. LED0and LED1should then begin alternately blinking on yourboard.9.After confirming that your code is running and your LEDs are blinking, you can terminateyour debug session by right-clicking the Silicon Labs ARM MCU item that, as indicated inthe below screenshot, should appear in the Debug window. You should selectTerminate from the subsequent pop-up menu. Your LEDs should continue to blink afterthe debug session has ended, since your project’s code now resides in Flash memory.Lab 2: µC/ProbeIn this lab, you’ll use µC/Probe to visualize the internals of the project that you built in Lab 1. You’ll first monitor one of the project’s C variables, and you’ll then use µC/Probe’s kernel-awareness capabilities to view statistics output by the µC/OS 5 kernel on which the project is based.Procedure:1.You should now run µC/Probe. You can actually start the tool within Simplicity Studio byclicking the button shown in the below screenshot.2.µC/Probe makes it possible to view the values of an application’s variables as codeactually runs. In order to offer this capability, it needs information on the variables’ locations. It typically gets this information from an ELF file. When you built the Micrium OS example project following the procedure given in the previous section of this document, an ELF file, Tools-Lab-1.axf, should have been generated by Simplicity Studio and placed at the path listed below. In this path, <project_location> is the folder where your project resides. If you’re uncertain of this location, you should right-click the project’s name in Project Explorer and select Properties. If you then select Resource from the categories listed on the left side of the Properties dialog, you’ll be able to read your project folder from the Location field in the upper half of the dialog.<project_location>\GNU ARM v4.9.3 - Debug3.You can pass an ELF file to µC/Probe using the Symbol Browser located at the bottom ofthe tool’s main window. You should now click the Symbol Broswer’s ELF button, which is shown in the below screen shot. In the ensuing dialog, you should simply browse to the ELF file described above and then click the Open button.4.µC/Probe will be able to use your board’s built-in J-Link debugger to access variables inyour running example code. In order to establish J-Link as your preferred communication interface, you’ll need to select it in the Settings dialog. You should now open this dialog by clicking the Settings button shown below.5.As indicated in the below screenshot, the lower left corner of the Settings dialogcontains a list of Debug Interfaces containing just one item: J-Link. You should confirm that J-Link is selected, and you should then ensure that Don’t Change has been specified for the Interface Mode. Before clicking OK, you should choose Silicon Labs as the Manufacturer, and, using the provided table, select EFR32MG12PxxxF1024as your Device.6.µC/Probe provides a variety of graphical components that can be used for displaying thevalues of variables. You can access these components via the Toolbox located on the left side of the main program window. You should now instantiate a new component—a gauge—by first clicking Angular Gauges in the lower half of the Toolbox and thendragging and dropping the Semicircle 3gauge onto the data screen in the middle of µC/Probe’s program window. The data screen should then appear as shown in thebelow screenshot.7. A graphical component is not of much use until it has been associated with a variable, orsymbol. The Symbol Browser will be your means of associating a variable with your new gauge. If the Symbol Browser is not already displaying a list of C files corresponding to the code that you built in the first part of the lab, you can make such a list appear by expanding the entry for Tools-Lab-1.axf that appeared when you specified the path of this file in Step 2. Once the list is visible, you should expand the entry for the C file ex_main.c in order to make the variables contained in that file appear. You should then drag and drop the variable Ex_MainSpeed from the Symbol Browser to your gauge. As indicated below, the variable name will appear below thegauge to indicate that the two are associated.8.You should now click µC/Probe's Run button, which, as indicated below, is located in theupper left-hand corner of the tool's main program window. If you’re using the Educational Edition of the tool, you’ll be presented with a dialog indicating that you won’t have access to µC/Probe’s full set of features unless you upg rade to the Professional Edition. You can simply click this dialog’s Close button. You will then enter µC/Probe’s Run-Time mode. The dial on your gauge should begin moving from 0 to 100 and then back to 0. It should repeat this pattern indefinitely. Keep in mind that, with the Educational Edition, you will only be able to remain in Run-Time mode for one minute before a time-out occurs and another dialog prompting you to upgrade appears.9.µC/Probe can be used with nearly any embedded system—including those not based ona real-time kernel. However, the tool is especially helpful when paired with projectsthat incorporate Micrium’s embedded software modules, in part because of its kernel-awareness capabilities. These capabilities are implemented via a number of pre-populated data screens that show the values of different kernel variables. You should now stop µC/Probe (by clicking the Stop button located in the upper left-hand corner of the main program window) and add the kernel-awareness screens for µC/OS 5, the kernel featured in the example project, to your workspace. You can add the screens by first clicking Project1in µC/Probe's Workspace Explorer window and then clicking Screens>Micriµm OS Kernel (µC/OS-5), as indicated in the below screenshot. After making this change, you can again click Run to prompt µC/Probe to begin updating the new screens with kernel statistics.10. Within the main µC/OS 5 kernel-awareness screen, there are a number of subordinatescreens, including one for Task(s). As shown below, this screen displays the status of each task running in your project. You should now take a moment to look over the screen and familiarize yourself with the various tasks that the example incorporates.The percentage of CPU cycles consumed by the tasks is provided in the CPU Usage column, and you should note that, after the kernel’s Idle Task—which runs when no application tasks are ready—it is the Tick Task—the kernel task responsible for processing periodic tick interrupts—that consumes the most CPU cycles, with a usage of approximately 5.5%.11.After you’ve looked over Task(s), you should stop µC/Probe (via the Stop buttonmentioned in Step 9). You should then return to Simplicity Studio to make a simple change to the example project’s code. Within the IDE, you should open the file ex_main.c. You’ll be able to find this file by expanding the Micrium folder within the Project Explorer, and then similarly expanding Micrium_OS_V5.00 and examples. You should add the below two lines to ex_main.c, placing the new code at line 156, just below the variable declaration in the main() function. The result of your addition will be to change the frequency of tick interrupts received by the kernel, from 1 kHz to 100 Hz.OS_TASK_CFG Ex_MainCfgTick = {DEF_NULL, 256u, 4u, 100u};OS_ConfigureTickTask(&Ex_MainCfgTick);12.You should now build and run your modified project, following the same procedure thatyou used in Lab 1. Afterward, you should return to µC/Probe and again run your workspace. With tick interrupts now occurring at 1/10 of their original frequency, you should confirm that the overhead of the kernel’s Tick Task has experienced a similar decrease, meaning that the task’s CPU usage should be around 0.6%.Lab 3: SystemViewThis lab w ill walk you through the steps needed to use SEGGER’s SystemView with the example project featured in the previous two labs. With SystemView, you’ll be able to see the cont ext switches, interrupts, and kernel function calls that occur as the project runs.Procedure:1.Because the latest Micrium OS is a relatively new software module, it is not yetsupported by the version of SystemView available from the SEGGER Web site.Fortunately, though, it is fairly easy to update SystemView so that it will recognize applications based on MicriumOS. To make the update, you should now copy SYSVIEW_Micrium OS Kernel.txt, which was provided in Micrium-Tools-Lab.zip, and paste this file into the Description folder in the SystemView install path—Program Files (x86)\SEGGER\SystemView_V242.2.You should now run SystemView by clicking the tool’s entry in the Windows Start menu.3.When you run SystemView for the first time, you’ll be presented with the below dialog,asking whether you’d like to load a sample recording. You can simply click this dialog’s No button.4.In order to begin analyzing the behavior of your example project’s code, you’ll need torecord the code’s activity. To initiate recording, you should select Target>Start Recording within SystemView. You will then be presented with a Configuration dialog.Once you’ve verified that the contents of this dialog match the screenshot shown below, you should click the OK button to initiate recording.5.Shortly after you’ve started to record, you may be presented with the dia log shown inthe below screenshot. This dialog indicates that some of the data that would otherwise be displayed by SystemView was lost, because the buffer used to temporarily store that data on your target experienced overflows. You can simply click OK to close the dialog.For information on how to limit the potential for overflows, you can consult the last section in this document.6.Once you’ve gathered a few second’s worth of data, you should click the Stop Recordingbutton shown in the first of the two screenshots shown below. As the second screenshot indicates, the Timeline located near the center of the SystemView main program window should subsequently display all of the task and ISR activity that occurred during the period the recording was active. You now can begin investigating the execution of the example project’s code in detail.7.If you adjust the zoom on the timeline, you should be able to see, every 40 ms, thepattern of events depicted in the below screenshot. The example project incorporates three application tasks, in addition to a number of kernel, or system, tasks. One of the application’s tasks, labeled Post Task, peridocially performs a post operation on a semaphore, and that is what is shown in the screenshot. In the next couple of steps, you’ll adjust the period of the Post Task and then make an additional SystemViewrecording to confirm the results.8.The period of the Post Task is established by a variable in the same file that youmanipulated in Step 11 of the previous lab, ex_main.c. The variable is named Ex_MainDelayPostms and you have two different options for changing its value.One is to simply replace the variable’s initialization on line 371 of ex_main.c with thebelow code. You’l l then need to rebuild the example project and again download its code to your board. The second option involves µC/Probe. In addition to allowing you to read variables, µC/Probe offers a number of Writable Controls for changing variable values. You can drag and drop one of these controls—a Horizontal Slider, for example—into your workspace from Lab 2, and use the new control to adjust the value of ExMainDelayPostms.Ex_MainDelayPostms = 20;9.With the value of the variable adjusted, you should return to SystemView and make anew recording. Now the post operation described in Step 6 should be visible every 20 ms, as opposed to 40 ms. If time permits, you can make further adjustments to the code, changing, for example, the priority of the Post Task (established by the #define EX_MAIN_POST_TASK_PRIO), and you can use SystemView to observe the results of the changes.Limiting OverflowsThere are a few steps that you can take to limit overflows and maximize the amount of data recorded by SystemView. One of these is to increase the size of the buffer used to temporarily store SystemView data on your target before it is passed to the PC application. The buffer size is established by the #define SEGGER_SYSVIEW_RTT_BUFFER_SIZE in the file SEGGER_SYSVIEW_Conf.h. This file is contained in Micrium/Tools/SystemView/Config within the example project. The provided copy of SEGGER_SYSVIEW_Conf.h uses a buffer size of 4096, but you’re free to increase to any size that the hardware can accomodate.An additional measure, recommended by SEGGER for reducing the number of overflows, is to ensure that SystemView is the only tool using your J-Link. In other words, if you were previously running µC/Probe or the Simplicity Studio debugger while recording data, you should stop the other tools and try a new recording. With exclusive access to the J-Link, SystemView should have fewer impediments to capturing all of the example project’s events.。
赛目科技 自动驾驶仿真测试工具链Sim Pro

赛目科技自动驾驶仿真测试工具链Sim Pro
佚名
【期刊名称】《汽车观察》
【年(卷),期】2024()3
【摘要】赛目自研的Sim Pro是全球首个通过ISO 26262功能安全最高等级ASIL D认证的仿真测试工具链产品,具备高阶自动驾驶仿真测试、一体化测试验证服务、高效精准分析验证流程、全面多维评测、云部署加速仿真测试等多重能力。
其创新设计旨在满足用户对节约算力、高效环保的迫切需求,为智能网联汽车行业提供卓越解决方案。
【总页数】1页(PI0001)
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于Sim Pro的焊装夹具机构的仿真
2.基于KUKA.Sim Pro的工业机器人码垛工作站仿真设计
3.基于KUKA Sim Pro的喷涂机器人仿真研究与喷涂效果分析
4.基于OPC UA技术的KUKA.Sim Pro与S7-1500PLC通信仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。
利用MICAPS操作平台建立多重相似预报系统的开题报告

利用MICAPS操作平台建立多重相似预报系统的开题报告1.研究背景天气预报在现代社会的生产、生活中发挥着重要的作用。
传统的天气预报方法是基于周期性的统计模型,使得预报结果误差较大,难以满足人们的需求。
而多重相似预报技术依据历史资料,通过寻找现在和历史状态相似的情况,结合数值预报资料进行预报,是一种相对新兴的预报方法。
该方法具有良好的预测效果,并且可以提供概率预报结果,对于某些关键行业如交通、航空等来说,意义重大。
2.研究目的本次研究旨在利用MICAPS操作平台建立多重相似预报系统,拟实现以下目标:(1)通过对历史数据分析,建立相似预报因素库。
(2)结合数值预报资料,利用多重相似预报技术实现天气预测,并提供概率预报结果。
(3)通过与传统预报方法比较,验证多重相似预报技术的优越性。
3.研究内容和方法(1)建立相似预报因素库:选取一定时间段内的历史观测资料和数值预报资料,通过对时间序列进行相关系数计算,筛选出相对重要的气象要素作为相似预报因素。
(2)基于MICAPS平台编写多重相似预报程序:结合所选取的相似预报因素,利用计算机语言编写程序实现多重相似预报技术,并将其运用在MICAPS操作平台上,以实现天气预报功能。
同时,拟实现概率预报结果的生成。
(3)验证多重相似预报技术的优越性:将多重相似预报结果与传统的单一预报方法相比较,分析多重相似预报技术的预测准确性、可信度及运算速度。
4.研究意义(1)针对当前气象预报存在的问题,研究多重相似预报技术,提高天气预报的可靠性和准确性,对社会生产生活提供了一定的支持。
(2)通过利用MICAPS操作平台,实现了多重相似预报技术的自动化处理,进一步提高了预测效率。
5.研究计划时间节点| 研究内容---|---第一年上半年| 相似预报因素库的建立。
第一年下半年| 基于MICAPS平台编写多重相似预报程序,并实现基本的天气预测功能。
第二年上半年| 拓展多重相似预报功能,将其运用在复杂天气情况下进行验证。
simcse模型结构
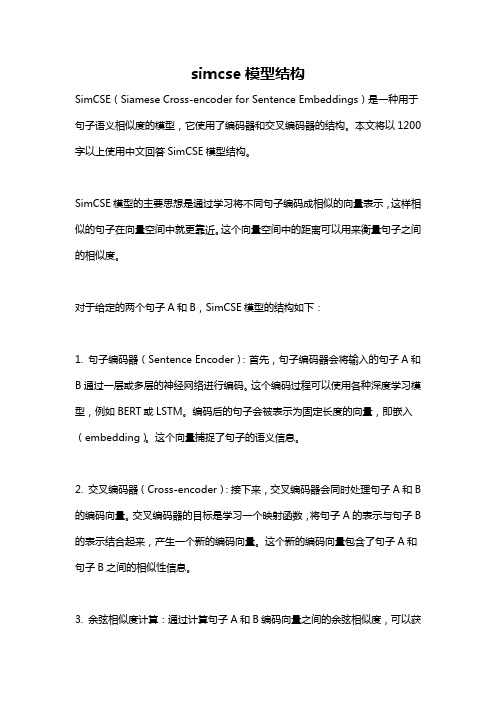
simcse模型结构SimCSE(Siamese Cross-encoder for Sentence Embeddings)是一种用于句子语义相似度的模型,它使用了编码器和交叉编码器的结构。
本文将以1200字以上使用中文回答SimCSE模型结构。
SimCSE模型的主要思想是通过学习将不同句子编码成相似的向量表示,这样相似的句子在向量空间中就更靠近。
这个向量空间中的距离可以用来衡量句子之间的相似度。
对于给定的两个句子A和B,SimCSE模型的结构如下:1. 句子编码器(Sentence Encoder):首先,句子编码器会将输入的句子A和B通过一层或多层的神经网络进行编码。
这个编码过程可以使用各种深度学习模型,例如BERT或LSTM。
编码后的句子会被表示为固定长度的向量,即嵌入(embedding)。
这个向量捕捉了句子的语义信息。
2. 交叉编码器(Cross-encoder):接下来,交叉编码器会同时处理句子A和B 的编码向量。
交叉编码器的目标是学习一个映射函数,将句子A的表示与句子B 的表示结合起来,产生一个新的编码向量。
这个新的编码向量包含了句子A和句子B之间的相似性信息。
3. 余弦相似度计算:通过计算句子A和B编码向量之间的余弦相似度,可以获得一个0到1之间的数值,表示两个句子之间的相似度。
余弦相似度是通过计算两个向量的夹角来测量的,夹角越小表示句子越相似。
4. 损失函数和训练:在训练SimCSE模型时,常用的损失函数是对比损失函数(Contrastive Loss)。
对比损失函数鼓励相似的句子在向量空间中更接近,而不相似的句子则更远离。
通过最小化对比损失函数,模型可以学习到更准确的句子表示。
SimCSE模型的优点是它能够将句子编码成语义丰富的向量表示,这些向量可以用于各种句子相关的任务,如句子分类、句子匹配等。
此外,SimCSE模型还可以通过无监督学习的方式学习到句子间的语义相似度,而无需任何标注数据。
simp密度法

simp密度法简述Simpson的密度法是一种经典的计算多样性的方法,用于计算在一个区域内的物种多样性,通过计算各种物种在该地区的密度来衡量其种类的丰富程度。
然后将这些密度值加在一起,最终得到物种多样性的指数。
该方法最早由Simpson提出,他是一种度量轮廓或样本单元中不同物种或谱系数量以及这些物种或谱系之间的相对丰度差异程度的方法。
背景生物多样性一词指的是一个区域内存在的各种生物体(包括栖息地和生境)的种类和数量。
生物多样性是尺度的、分层的和动态的,由生物体、物种、基因、生态系统和服务中心等多个方面组成。
所有这些方面和许多其他方面都是人类福祉、经济发展和文化的重要组成部分。
生物多样性的丧失已经成为了重要的全球问题。
为了理解和保护生物多样性,必须开发出能够快速、准确、可重复和可比较的测量方法。
物种是生物多样性研究中的基本单位。
因此,评估物种多样性是非常重要的,通过评估该地区内的物种密度可以测量物种多样性。
通过物种密度法,可以比较在不同的生境或区域内的物种多样性。
绝大多数使用密度法的方法都是基于物种多样性指数计算的,以便更容易地比较不同地区的物种多样性。
原理表达式Simpson的密度法主要用于检测物种的丰富度和多样性。
计算公式如下:D = Σ (ni/N)2其中D是物种多样性指数,ni是第i个物种的个体数,N是所有物种的总个体数。
这个公式是将每个物种密度的平方相加,并减去1,然后得到多样性指数D。
该公式可以表示为“生物群落中找到两个随机标本,它们属于不同的物种的概率”。
因此,越高的值表示越低的多样性。
优点与其他物种多样性测量方法相比,Simpson的密度法具有以下优点:1.易于理解:Simpson的密度法是非常基础的物种多样性测量方法,易于理解和实现。
2.可用于不同生境:该方法可用于研究不同的生境中的物种多样性。
3.准确性:该方法提供了非常准确的结果,可以在不同地区进行比较。
缺点1.与物种个数和单一物种丰度相关:本方法不能检测物种的分布规律,而且会忽略纯度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Sim/CPN:A Web-Based Simulator for ColouredPetri NetsAdenilso da Silva Sim˜a o1,Jos´e Carlos Maldonado11{adenilso,jcmaldon}@p.brDepartamento de Ciˆe ncia da Computa¸c˜a o e Estat´ıstica–Universidade de S˜a o Paulo Avenida Trabalhador S˜a ocarlense,400CentroCx.Postal668-CEP13560-970AbstractColoured Petri Nets are a formalism for modeling parallel and con-current systems.Besides formal techniques for checking the propertiesof the model,they allow the simulation of the model,which provides anempirical insight of the model dynamics and,consequently,the systemimplied behavior.In this paper,we present a WEB based tool—namedSim/CPN—for simulation of Coloured Petri Nets.The tool allows forusers to simulate the nets over the internet,being available to a wide rangeof platforms.Keywords:Coloured Petri Nets,Simulation,Web Application.1.IntroductionPetri nets,since their conception in the early60’s,have been employed in the modelling of systems in which the concurrency and parallelism among processes play an important role in the overall behavioral aspects(Peterson,1981).Their simplicity and expressiveness make the Petri nets an excellent tool for modeling concurrent system.However,the attempts of using Petri nets in practical situations reveal two main drawbacks.Firstly,there is no concept of data and,therefore,the nets become often excessively large,once all data manipulation must be directly represented in the net structure.Secondly,there is no concept of hierarchy.Thus,it is not possible to construct a large net from a set of smaller sub-nets.Several extensions have been proposed in order to overcome these drawbacks,among which are the Coloured Petri Nets(CPNs)(Jensen,1986,1997).To assure that the system corresponds to the requirements it was designed for, several techniques have been used to validate the model,such as property analysis and simulation.The property analysis,mainly the reachability tree(Peterson,1981) and the invariant calculus(Reisig,1985),is employed to infer system properties, such as the deadlock freeness and the reachability of specific configurations.In the simulation,testing sequences are executed and the achieved results are compared against the expected ones.Several tools have been developed to support Petri net simulation,such as Design/CPN(Jensen,1986),GreatSPN(Chiola et al.,1995), Maria(M¨a kel¨a,1999)and PEP(Programming Environment based on Petri Nets) (Grahlmann,1997).An important issue that is often not taken into consideration by these tools is to provide a means to quantify the testing activity,that allows to determine how much of the model was already exercised and when the testing activity can be finished(Sim˜a o et al.,2000).In other words,to provide a mechanism to assess the quality of the testing activity.An adequacy criterion defines testing requirements that must be fulfilled by an adequate test case suite.Therefore,the testing activity can be quantified by determining the proportion of satisfied testing requirementsin comparison to the previously established ones.We have been working in this problem,both proposing and assessing the application of program testing concepts to testing CPNs.In this context,we have designed and are currently implementing two tools for supporting the application of,respectively,coverage testing(Sim˜a o et al.,2003)and mutation testing to CPNs(Sim˜a o,2004).As a design decision, both tools are being developed as a WEB based application to be used over the internet.However,analyzing the tools available for simulation of CPNs,we observed that none of them provides functionalities to allow the execution over the internet. We,therefore,have designed and implemented Sim/CPN,a WEB-based coloured Petri net simulator.Primarily,this simulator has the purpose of being integrated into the tools alluded to above.Nonetheless,it has proved to be useful to allow the CPN simulation in a wide range of platforms.For example,despite of the tool itself be running in a LINUX server,it can be browsed and viewed from any browser in a machine in any platform.This paper is organized as follows.In Section2we present the main concepts of CPNs.The main features of Sim/CPN are shown in Section3.Its overall architecture is presented in Section4.Finally,we present some concluding remarks in Section5.2.Coloured Petri NetsColoured Petri Nets are a formal technique for system description,with a strong mathematical basis,specially suitable for modeling systems with discrete event, concurrency and parallelism(Jensen,1986).Among the main features of this technique are:•the distributed description of conditions in contrast to other techniques(e.g., Finite State Machines);•the explicit representation of causal dependence or independence of the sys-tem elements;and•the appealing graphical representation of the system and its dynamic aspects. The CPNs extend the ordinary Petri nets by adding capabilities for defining data types and manipulating values of these types.For historical reasons,the types in a CPN are called“colors”,to contrast with the ordinary Petri Nets in which all the values are indistinguishable,i.e.,they are“black”.A CPN is a bipartite graph whose nodes are divided up in two disjoint sets: the places P(that usually represent the passive elements of the system)and the transitions T(that represent the active elements).Each place is associated with a color and can contain multi-set1values of this color.An arc is an edge in the graph that joins a place p∈P to a transition t∈T(called an input arc)or transition t to place p(called an output arc).The arc can be annotated with an expression that can be composed by variables,values and operations.The expression annotated in an arc must,when evaluated,generate a multi-set of values from the color of the adjacent place,assigning values to all its variables,if any.A markingµis a specific association of each place with a multi-set of elements from its respective color and denotes a particular configuration of the CPN.A binding is a pair of a transition t and an assignment s of values to all variables that appear in any arc adjacent to t,if any.In a given markingµ,a binding(t,s) is enabled if the multi-set resulting from evaluating the expression annotated inevery input arc from the place p to t with the assignment s is lesser than multi-set associated with p inµ.A binding b=(t,s)that is enabled inµcan befired, producing another markingµ (denoted byµ[b µ ).µ is related toµin such a way that,for every input arc from a place p to t,the multi-set resulting from evaluate the annotated expression with s is removed from p,and,conversely,for every output arc from t to a place p,the resulting multi-set is included into p.2.1.Hierarchical CPNsIn order to ease the definition and manipulation of large CPNs,a hierarchical tree of CPN pages can be used.A CPN page can be thought of as a simple CPN whose meaning,however,depends on other sub-and/or super-pages.Every place with arcs from or to a hierarchical transition is a port place.The linking between a page and its sub-pages is made by hierarchical transitions and port places.A hierarchical transition is associated with another page.It should also associate a place in the sub-page(called,socket place)to each of its port places.The pair of socket/port places should be compatible,that is,should have the same color.The semantics of a hierarchical CPN is the same of a non-hierarchical CPN, regarding that every pair of socket/port places behaves as if both are the same place.In other words,the contents of both places are always the same.This implies that,whenever an element is added to(respectively,removed from)either place,the same element is added to(respectively,removed from)the other place.3.Sim/CPN:Main FeaturesSim/CPN is actually a set of related WEB pages with functionalities i)to input a set of XMLfiles with the CPN pages(as explained in Section4);ii)to set up an initial marking;iii)to input,step by step,afiring sequence;and iv)to store/retrieve the simulation sequences.In order to simulate a CPN,the user has to log in the system.Then,a simulation session can be created,or,alternatively,an existing one can be resumed.Each session has information about one single CPN.Within a session,the user can include/exclude XMLfiles of the CPN and enter the simulation. Optionally,thefired sequences can be stored(e.g.to be processed by a testing tool afterward).There are two modes of exhibition.In thefirst mode,all the current relevant information of the simulation is displayed in a single WEB page.This mode is appropriate with large,high-resolution screens.Alternatively,in the second mode, every piece of information is displayed in a separate WEB page.Figure1presents an example of Sim/CPN simulation in thefirst mode.This WEB page illustrates the main information displayed by the simulator,namely:1.Menu Bar:In this part,the simulator presents a context-dependent menuwith the options available in the current WEB page.This menu is displayed as image buttons with links to the respective WEB page.Summarily,this menu allows to i)create a new session;ii)include/exclude XMLfiles in a ses-sion;and iii)set up user information(e.g.password and display preferences).2.Hierarchy Page:In this part,the hierarchy of the pages is displayed inthe form of a tree.Each page is linked to its sub-pages,if any.The page that is currently displayed,if any,is represented by an ellipse,whereas the remaining pages are represented by rectangles.The pages that possess at least one transition with enabled bindings are highlighted.3.CPN Page:In this part,the page that are currently selected is shown.Thetransitions that have at least one enabled binding is highlighted.The user can click on a transition in order to select it and update the list of enabled bindings in part4.4.Enabled Bindings:In this part,the Sim/CPN presents the bindings of thecurrently selected transition that are enabled in the current marking.Each binding is displayed as a link.By clicking on such a link,the user can request thefiring of the respective binding,updating all the Web page to reflect the new reached marking.There are also links that allow to access the initial marking(reseting all thefired binding sequence)and to access the previous marking(popping the last binding offthe sequence).5.Fired Binding Sequences:In this part,Sim/CPN presents the sequencesof bindings that werefired up to the current marking.Each binding is displayed as a link.By clicking on such a link,the Sim/CPN will chop the sequence offired binding up to the respective binding.1Figure1:Sim/CPN.4.Sim/CPN:Implementation AspectsThe pages are input to Sim/CPN as a set of XMLfiles,which describe both the structural elements of the CPN(e.g.its places,transitions and arcs)and its graphical attributes(e.g.the display color,position and dimension of each element). These XMLfiles are designed after the Design/CPN DTD(Lyngs and Mailund, 1998).The Design/CPN tool also uses this format as an interchangeable format for its CPNs.Therefore,Sim/CPN can be input with XMLfiles that were generated by Design/CPN.With this respect,Sim/CPN can be used as a mechanism to allow the simulation of Design/CPN nets over the Web.Figure2presents the overall execution schema of Sim/CPN.Before being able to execute Sim/CPN,the XMLfiles of the CPN is input to an external module, named cpn-ml2sml(step a),which compiles it,generating SML code(Hansen and Rischel,1999)for the simulation/execution of the net.This module was developed in C++,using flex and bison(Mason and Brown,1990)to make the lexical andsyntactical analysis of the XMLfiles,respectively.The CPN SML code is,then, linked to a generic SML code(step b),which is responsible for implementing the mechanisms for calculating the resulting marking and the enabled bindings.The CPN SML code is an intermediate representation of the CPN which embodies the firing semantics.It,therefore,is used to calculate the enabled bindings,as well as the current marking(step c).The XMLfiles are also processed the by module Draw(step d),which interprets the graphical attributes of the pages and produces imagefiles to display them (step e).This module was developed in Perl,using the image package ImageMagick2.A set of WEB pages was developed in PHP in order to handle the interaction with the simulator.Thus,based on the links and buttons the user select in the WEB page,a proper PHPfile is invoked,which,by its turn,can invoke the basic modules to calculate the corresponding information and/or imagefile.This information is, then,sent to the user through the HTTP server.Figure2:Sim/CPN:Execution Schema.As mentioned before,Sim/CPN is also being used within the context of CPN testing tools.Therefore,according to the context,the simulator stores information about how the simulation was carried out,allowing the testing tools to employ it for,e.g.,assessing the achieved coverage.5.Concluding RemarksColoured Petri Nets are very useful tool for modeling complex systems.Due to their formal basis,they allow for several analysis methods to be applied.Moreover,it is possible to precisely simulate its behavior.However,because of the large quantity and the high complexity of the calculations that are involved,it is mandatory to have support of an automated tool.In this paper,we presented Sim/CPN,a simulator for Coloured Petri Nets. It was developed as a WEB application,making it available to a wider range of users in different platforms.The input format is based on XMLfiles according to Design/CPN DTD.Currently,besides being used as a standalone WEB application,Sim/CPN is also employed within WEB-based CPN testing tools we are developing(Sim˜a o,2004; Sim˜a o et al.,2003).ReferencesChiola,G.,Franceschinis,G.,Gaeta,R.,and Ribaudo,M.(1995).Greatspn1.7: Graphical editor and analyzer for timed and stochastic petri nets.Performance Modeling Tools,24(1&2):47–68.Grahlmann, B.(1997).The PEP Tool.In Tool Presentations of ATPN’97 (Application and Theory of Petri Nets).Hansen,M.R.and Rischel,H.(1999).Introduction to Programming using SML. Addison-Wesley.Jensen,K.(1986).Coloured Petri nets.In Application and Theory of Petri Nets,volume254of Lecture Notes on Computer Science,pages248–299,Berlin. Springer.Jensen,K.(1997).Coloured Petri Nets:Basic Concepts.Springer,Berlin,2edition. Lyngs,R.B.and Mailund,T.(1998).Textual interchange format for high-level petri nets.In Jensen,K.,editor,Workshop on Practical Use of Coloured Petri Nets and Design/CPN,pages47–63,Aarhus.Mason,T.and Brown,D.(1990).Lex&Yacc.O’Reilly.M¨a kel¨a,M.(1999).Maria:Modular reachability analyser for high-level petri nets. In International Conference on Theory and Applications of Petri Nets-Tool presentation part,pages59–64,Williamsburg,USA.Peterson,J.L.(1981).Petri Net Theory and the Modeling of Systems.Prentice-Hall, Englewood Cliffs,New Jersey.Reisig,W.(1985).Petri Net:An Introduction.Springer-Verlag,New York.Sim˜a o,A.S.(2004).Aplica¸c˜a o da An´a lise de Mutantes no Contexto do Teste e Valida¸c˜a o de Redes de Petri Coloridas.PhD thesis,ICMC/USP,S˜a o Carlos,SP. Sim˜a o,A.S.,Maldonado,J.C.,and Fabbri,S.C.P.F.(2000).Proteum-RS/PN:A tool to support edition,simulation and validation of Petri nets based on mutation testing.In Anais do XIV Simp´o sio Brasileiro de Engenharia de Software,pages 227–242,Jo˜a o Pessoa,PB.Sim˜a o,A.S.,Souza,S.R.L.,and Maldonado,J.C.(2003).A family of coverage testing criteria for coloured petri nets.In XVII Simp´o sio Brasileiro de Engenharia de Software,pages209–224,Manaus,AM.。