黄章进图形学 第五章 视图
计算机图形学课件第五章三维图形生成和变换技术

p12
p22
p01
p00
p11
p10
p31
p30
16
2、贝塞尔曲面的性质 Bezier曲面有类似于Bezier曲线的性质。 (l)端点位置 由于 P00=P(0,0) P0m=P(0,1) Pn0=P(1,0) Pnm=P(1,1) 说明P00、P0m、Pn0、Pnm是曲面P(u,v)的四个端点,见图 p33
21
其图形表示如图所示,可以证明它是一个双曲抛物面( 马鞍面)上的一块曲面片。
22
在上式中,当u=0和u=1时,得到的两条边界为直线段;
P (u, v ) = (1 u)(1 v ) P00 u(1 v ) P10 (1 u)vP01 uvP11 P (o, v ) (1 v ) P00 vP01 P (1, v ) = (1 v ) P10 vP11
5
5.2
一、概述
自由曲面的生成
在计算机出现之前以及在计算几何没有很好地发展 之前,一些工程实际中应用的复杂自由曲面,如飞机、 船舶、汽车等几何外形的描述以及地形形状的表示,传 统的处理办法是用一组或几组平行平面去裁这个曲面, 画出几组截交线来表示这个曲面。例如船体就是用互相 正交的三组平面截得的纵剖线,横剖线和水平线表示; 地面则是用一组水平面截得等高线表示的。这实际上是 把曲面问题转化成了曲线问题。这种处理办法可称为曲 线网格表示法。
r(ui , v j ) [ x(ui , v j ), y(ui , v j ), z(ui , v j )]
10
r(ui,vj)
r(ui,v)
高级计算机图形学
减色
• 光线与物体的作用 • 彩色打印 • 照片底片(negative film)
16
针孔照相机
(x, y, z)点的投影位置 xp = -d*x/z, yp = -d*y/z, zp = -d
X-射线 可见光 无线电波
λ (nm)
350
λ (nm)
780
8
几何光学与光线跟踪
构造图像的一种方法就是 从一个点光源出发,跟踪 所有的光线,确定哪些光 线进入照相机的镜头。然 而,每条光线在被吸收或 者进入无穷空间之前,有 可能与物体发生多次接触。
9
亮度图像与彩色图像
亮度图像(luminance image)
19
全局与局部光照
不能对每个对象单独 计算它的颜色与阴影 有些对象被其它对象 遮住了光源 光可以在对象之间反 射 有些对象是透明的
20
光线跟踪的不足
光线跟踪在很上大程度上是基于物理模型 的,因此为何不应用它设计一个图形系统? 对于由多边形和二次曲面构成的对象,应 用点光源时,它确实非常简单 原则上它可以得到全局光照效果,例如阴 影和多重反射,但是光线跟踪速度很慢, 不适用于交互系统的需要
17
虚拟照相机模型
投影线
投影平面 p的投影 投影中心
p
18
优势
把对象、观察者和光源独立开 二维图形是三维图形的一个特殊情形 可以得到简单的软件API (Application programming interface)
• 指定对象、光源、照相机、材料属性 • 由API的实现确定最终的图像图像
(完整版)计算机图形学基础第五章课后习题答案
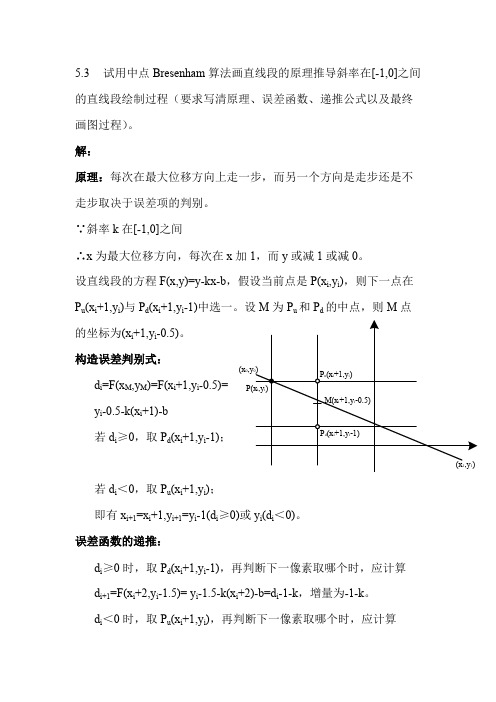
5.3 试用中点Bresenham 算法画直线段的原理推导斜率在[-1,0]之间的直线段绘制过程(要求写清原理、误差函数、递推公式以及最终画图过程)。
解:原理:每次在最大位移方向上走一步,而另一个方向是走步还是不走步取决于误差项的判别。
∵斜率k 在[-1,0]之间∴x 为最大位移方向,每次在x 加1,而y 或减1或减0。
设直线段的方程F(x,y)=y-kx-b ,假设当前点是P(x i ,y i ),则下一点在P u (x i +1,y i )与P d (x i +1,y i -1)中选一。
设M 为P u 和P d 的中点,则M 点的坐标为(x i +1,y i -0.5)。
构造误差判别式:d i =F(x M ,y M )=F(x i +1,y i -0.5)=y i -0.5-k(x i +1)-b若d i ≥0,取P d (x i +1,y i -1);若d i <0,取P u (x i +1,y i );即有x i+1=x i +1,y i+1=y i -1(d i ≥0)或y i (d i <0)。
误差函数的递推:d i ≥0时,取P d (x i +1,y i -1),再判断下一像素取哪个时,应计算d i+1=F(x i +2,y i -1.5)= y i -1.5-k(x i +2)-b=d i -1-k ,增量为-1-k 。
d i <0时,取P u (x i +1,y i ),再判断下一像素取哪个时,应计算(x 0,yd i+1=F(x i+2,y i-0.5)= y i-0.5-k(x i+2)-b=d i-k,增量为-k。
判别式的初值:从(x0,y0)点出发,下一个像素的选取计算d0=F(x0+1,y0-0.5)= y0-0.5-k(x0+1)-b=-0.5-k取的是误差判别式的符号,因此可进行如下变换:D=d*2∆x∆x=x1-x0,根据选取的起点和绘制方向,∆x>0,因此,D与d同号。
九年级数学上册第五章投影与视图2视图第2课时复杂图形的三视图教学课件(新版)新人教版
5.2 视图
第2课时 复杂图形的三视图
导入新课
讲授新课
当堂练习
课堂小结
学习目标
1.会辨别复杂的几何体的三视图. (重点) 2.会画复杂的几何体的三视图.(重点) 3.明确三视图中实线和虚线的区别.(难点)
导入新课
复习引入
问题:请画出下面几何图形的 三视图.
主视图 左视图 俯视图
讲授新课
画复杂的几何体的三视图 画一画:画出下图的四棱柱的三视图. 解析:在画视图时,看得见部分的轮廓要画成实线,看 不见部分的轮廓线要画成虚线.
主视图
左视图
俯视图
典例精析
例1 画出如图所示的几何体的三视图.
分析:该几何体由两个大小不等的 长方体构成的组合体,画三视图时 要注意这两个长方体的上下、前后 位置关系.
1、只要有坚强的意志力,就自然而然地会有能耐、机灵和知识。2、你们应该培养对自己,对自己的力量的信心,百这种信心是靠克服障碍,培养意志和锻炼意志而获得的。 3、坚强的信念能赢得强者的心,并使他们变得更坚强。4、天行健,君子以自强不息。5、有百折不挠的信念的所支持的人的意志,比那些似乎是无敌的物质力量有更强大 的威力。6、永远没有人力可以击退一个坚决强毅的希望。7、意大利有一句谚语:对一个歌手的要求,首先是嗓子、嗓子和嗓子……我现在按照这一公式拙劣地摹仿为:对 一个要成为不负于高尔基所声称的那种“人”的要求,首先是意志、意志和意志。8、执着追求并从中得到最大快乐的人,才是成功者。9、三军可夺帅也,匹夫不可夺志也。 10、发现者,尤其是一个初出茅庐的年轻发现者,需要勇气才能无视他人的冷漠和怀疑,才能坚持自己发现的意志,并把研究继续下去。11、我的本质不是我的意志的结果, 相反,我的意志是我的本质的结果,因为我先有存在,后有意志,存在可以没有意志,但是没有存在就没有意志。12、公共的利益,人类的福利,可以使可憎的工作变为可 贵,只有开明人士才能知道克服困难所需要的热忱。13、立志用功如种树然,方其根芽,犹未有干;及其有干,尚未有枝;枝而后叶,叶而后花。14、意志的出现不是对愿 望的否定,而是把愿望合并和提升到一个更高的意识水平上。15、无论是美女的歌声,还是鬓狗的狂吠,无论是鳄鱼的眼泪,还是恶狼的嚎叫,都不会使我动摇。16、即使 遇到了不幸的灾难,已经开始了的事情决不放弃。17、最可怕的敌人,就是没有坚强的信念。18、既然我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下 去。19、意志若是屈从,不论程度如何,它都帮助了暴力。20、有了坚定的意志,就等于给双脚添了一对翅膀。21、意志坚强,就会战胜恶运。22、只有刚强的人,才有神 圣的意志,凡是战斗的人,才能取得胜利。23、卓越的人的一大优点是:在不利和艰难的遭遇里百折不挠。24、疼痛的强度,同自然赋于人类的意志和刚度成正比。25、能 够岿然不动,坚持正见,度过难关的人是不多的。26、钢是在烈火和急剧冷却里锻炼出来的,所以才能坚硬和什么也不怕。我们的一代也是这样的在斗争中和可怕的考验中 锻炼出来的,学习了不在生活面前屈服。27、只要持续地努力,不懈地奋斗,就没有征服不了的东西。28、立志不坚,终不济事。29、功崇惟志,业广惟勤。30、一个崇高 的目标,只要不渝地追求,就会居为壮举;在它纯洁的目光里,一切美德必将胜利。31、书不记,熟读可记;义不精,细思可精;惟有志不立,直是无着力处。32、您得相 信,有志者事竟成。古人告诫说:“天国是努力进入的”。只有当勉为其难地一步步向它走去的时候,才必须勉为其难地一步步走下去,才必须勉为其难地去达到它。33、 告诉你使我达到目标的奥秘吧,我唯一的力量就是我的坚持精神。34、成大事不在于力量的大小,而在于能坚持多久。35、一个人所能做的就是做出好榜样,要有勇气在风 言风语的社会中坚定地高举伦理的信念。36、即使在把眼睛盯着大地的时候,那超群的目光仍然保持着凝视太阳的能力。37、你既然期望辉煌伟大的一生,那么就应该从今 天起,以毫不动摇的决心和坚定不移的信念,凭自己的智慧和毅力,去创造你和人类的快乐。38、一个有决心的人,将会找到他的道路。39、在希望与失望的决斗中,如果 你用勇气与坚决的双手紧握着,胜利必属于希望。40、富贵不能淫,贫贱不能移,威武不能屈。41、生活的道路一旦选定,就要勇敢地走到底,决不回头。42、生命里最重 要的事情是要有个远大的目标,并借助才能与坚持来完成它。43、事业常成于坚忍,毁于急躁。我在沙漠中曾亲眼看见,匆忙的旅人落在从容的后边;疾驰的骏马落在后头, 缓步的骆驼继续向前。44、有志者事竟成。45、穷且益坚,不坠青云之志。46、意志目标不在自然中存在,而在生命中蕴藏。47、坚持意志伟大的事业需要始终不渝的精神。 48、思想的形成,首先是意志的形成。49、谁有历经千辛万苦的意志,谁就能达到任何目的。50、不作什么决定的意志不是现实的意志;无性格的人从来不做出决定。我终 生的等待,换不来你刹那的凝眸。最美的不是下雨天,是曾与你躲过雨的屋檐。征服畏惧、建立自信的最快最确实的方法,就是去做你害怕的事,直到你获得成功的经验。 真正的爱,应该超越生命的长度、心灵的宽度、灵魂的深度。生活真象这杯浓酒,不经三番五次的提炼呵,就不会这样可口!人格的完善是本,财富的确立是末能力可以慢 慢锻炼,经验可以慢慢积累,热情不可以没有。不管什么东西,总是觉得,别人的比自己的好!只有经历过地狱般的折磨,才有征服天堂的力量。只有流过血的手指才能弹 出世间的绝唱。对时间的价值没有没有深切认识的人,决不会坚韧勤勉。第一个青春是上帝给的;第二个的青春是靠自己努力的。不要因为寂寞而恋爱,孤独是为了幸福而 等待。每天清晨,当我睁开眼睛,我告诉自己:我今天快乐或是不快乐,并非由我所遭遇的事情造成的,而应该取决于我自己。我可以自己选择事情的发展方向。昨日已逝,
北师大版 数学九年级上册第五章《5.2 视图》课件

7. 人生伟业的建立,不在能知,乃在能行。 8. 同闯峥嵘十春秋,共创辉煌佳年华! 2 、做对的事情比把事情做对重要。 1. 不努力,怎么养活你众多的女人? 15. 宽阔的河平静,博学的人谦虚。秀才不怕衣衫破,就怕肚子没有货。 9. 勤学,勤思,勤问,苦钻。 25. 这世界上没有不适合学习的人,只是有人没有找到适合自己的学习方法罢了。 2 、一个人只有在全力以赴的时候才能发挥最大的潜能。 23. 心存感激,永不放弃!即使是在最猛烈的风雨中,我们也要有抬起头,直面前方的勇气。因为请相信:任何一次苦难的经历,只要不是毁灭 ,就是财富! 2 、做对的事情比把事情做对重要。 11 、你经历的所有的困苦都是有意义的,因为这是你要承担重任的先兆。 14. 有动力而无压力,紧张而不焦虑,迅速而不慌乱。 14. 我自信,我拼搏,我出色,我成功。 14. 有高水平的集体,才有高水平的个人。 5 、奋斗者在汗水汇集的江河里,将事业之舟驶到了理想的彼岸。 14. 有高水平的集体,才有高水平的个人。 19 、一个人幸运的前提,其实是他有能力改变自己。 8. 超越自己,向自己挑战,向弱项挑战,向懒惰挑战,向陋习挑战。
(二)合作探究 (1)物体的形状分别可以看成什么样的几何体?
(2)分别找出上述几何体的主视图.
(3)请完成下表.
几何体
主视图
左视图
俯视图
练习
1.如图是一个由4个相同的正方体组成的立体图形, 它的主视图是( A )
A
B
C
D
2.下列四个几何体中,左视图为圆的是( D )
A
B
C
D
3.如图,已知该几何体是由一些小正方体组合而 成的,则这个几何体的俯视图是图中的( D )
4. 争取时间就是争取成功,提高效率就是提高分数。 6 、太多的自问,太多的自我约束,常常使自己的脑子又涨又大。 17. 积一时之跬步,臻千里之遥程。 7. 人生伟业的建立,不在能知,乃在能行。 9. 勤学,勤思,勤问,苦钻。 16 、微笑可以减轻紧张的情绪和压力,不管面对多么愤怒或者冲动得人,只要微笑示之,都能坦然以对,微笑一把神奇的钥匙,可以打开别 人心灵的窗户,传递心灵的善意,退一步,海阔天空;退一步,瞒天过海;冲动是魔鬼,只要心平气和静下心来,相对而笑,一切都能化干戈为 玉帛。
北师大版九年级数学上册第5章教学课件:5.2第2课时复杂图形的三视图

会辨别复杂的几何体的三视图.
主视图 左视图 在根据三视图猜想几何体的形状时,要分步进行,先根据比较简单的某一视图猜想可能是哪些几何体;
在根据三视图猜想几何体的形状时,要分步进行,先根据比较简单的某一视图猜想可能是哪些几何体;
明确三视图中实线和虚线的区别.
当只给出两种视图时,往往个数不确定.
(1) 在根据三视图猜想几何体的形状时,要分步进行,先根据比较简单的某一视图猜想可能是哪些几何体;
较方便的做法是在俯视图的相应位置标出小正方形的个数,如:下图表示图是几个小方块所搭几何体俯视图,小正方形中的数字表
示在该位置的小立方块的个数.请画出它几何体的主视图、左
视图.
2
41 23
主视图
左视图
课堂小结
会辨别复杂的几何体的三视图. 描述这个直棱柱的形状,并补画它的左视图.
当只给出两种视图时,往往个数不确定.
先有俯视图确定物体在平面上的形状,再根据主视图和左视图确定各行各列的高度.
较方便的做法是在俯视图的相应位置标出小正方形的个数,如:下图表示几何体共有4个小正方体组成.
会画复杂的几何体的三视图,会根据复杂的三视图判断实物原
主视图 例3: 请根据下面提供的三视图,画出几何图形.
第五章 投影与视图
5.2 视图
第2课时 复杂图形的三视图
学习目标
1.会辨别复杂的几何体的三视图. (重点) 2.会画复杂的几何体的三视图,会根据复杂的三视图判断实物原
型.重点) 3.明确三视图中实线和虚线的区别.(难点)
导入新课
问题:请画出下面几何图形的三视图.
主视图 左视图
俯视图
讲授新课
一 画复杂的几何体的三视图
一个几何体的主视图和左视图如图所示,请补画这个几何体的俯视图.
计算机图形学课件第五章

计算机图形学
三维几何变换
绕任意轴的旋转变换(详见教材P371)
已知空间有一任意轴AB,A点坐标为(XA,YA,ZA), AB的方向数为(a,b,c)。空间一点P(x,y,z)绕 AB逆时针旋转θ角后变成P’(x’,y’,z’)。若旋转变换矩 阵为Rab,则有
[x’ y’ z’ 1]=[x y z 1]*Rab 下面讨论如何求出Rab的表达式。 基本思想:先平移坐标系,使A点成为新坐标系AX’Y’Z’的 原点;再使AB分别绕x’轴和y’轴旋转适当角度,使AB与z’ 轴重合,那么绕AB转θ角就变成了绕z’轴旋转θ角;最后, 再作逆变换,使AB回到原来的位置。
P P T
x P y
x P y
t x T t y
x x t x y y ty
计算机图形学
点的基本变换
旋转变换
–
–
点P(x,y,)的极坐标表示 x=rcosφ,y=rsinφ 绕坐标原点旋转角度 (逆时针为正,顺时针为负)
x1 y 1 x2 y2 x3 x n y3 y n
或
对图形的几何变换就可以归结为对点的变换
计算机图形学
二维图形的变换
点的基本变换 平面图形的变换 平面图形变换的齐次坐标表示 复合变换及变换的模式 其它变换
计算机图形学
一、点的基本变换
平移变换
变换的数学基础
u x U u y u z
vx V v y vz
矢量
–
矢量和
u x vx U V u y v y u z vz
计算机图形学-USTC

• J. D. Foley et al. Computer Graphics - Principles and Practice, 3nd Ed., 2013.(影印版: 计算机图形学 原理及实践-C语言描述(第二版), 机械工业出版社, 2002)
• D. F. Rogers. Procedural Elements for Computer Graphics, 2nd Ed., 1译9版98).(影印版: 计算机图形学的算法基础, 机械工业出版社, 2002. 有中
述的图形等等
• 构成图形的要素
– 几何要素:刻画对象的轮廓、形状的点、线、 面、体等
– 非几何要素:刻画对象的颜色、材质、纹理、 线型、线宽等
11
表示图形的方法
• 参数表示
– 由图形的形状参数(方程或分析表达式的系数, 线段的端点坐标等)+属性参数(颜色、线型等) 来表示图形
– 称为参数图或图形(graphics)
• 中译版: OpenGL编程指南 (原书第6版), 机械工业出 版社, 2008.8
• 在线OpenGL 1.1版本 http://www.glprogramming.c om/red/
5
OpenGL
• R. S. Wright, et al, OpenGL SuperBible: Comprehensive Tutorial and Reference (4th Edition), 2007.
• 点阵表示
– 枚举出图形中所有的点(强调图形由点构成) – 称为像素图或图像(image, 数字图像)
12
图形与图像
• 图形含有几何属性,或者说更强调场景的 几何表示,是由场景的几何模型和物理属 性共同描述
2018年秋北师大版九年级数学上册第五章 投影与视图复习课件(共49张PPT)
第五章 投影与视图
归纳整合
解: 连接 BC 并延长交地面于点 D,过点 C 作 CN⊥ DA,N 为垂足.∵EG∥BD,∴∠EGF=∠BDA. 又∵∠EFG=∠BAD=90°, ∴△EGF∽△BDA,∴
������������ ������������ ������������ ������������ ������������ ������������ ������������ ������������
的身高.
第五章 投影与视图
归纳整合
第五章 投影与视图
归纳整合
第五章 投影与视图
归纳整合
相关题1
如图5-Z-2, 一根直立于水 平地面的木杆AB在灯光 下 形成影子AC(AC>AB), 当 木杆绕点 A 按逆时 针方向 旋转, 直至到达地面时, 影子的长度发生 变化 . 已知 AE=5 m, 在旋转过程中, 影长的最大 值为5 m, 最小值为3 m, 且影长最大时, 木杆与光 7.5 m. 线垂直, 则路灯EF的高度为___
归纳整合
相关题3
[玉林中考]如图 5-Z-7, 一个正 方体切去一个三 棱锥后所得几何体的俯视图是( D ).
第五章 投影与视图
归纳整合
专题四 与视图有关的计算
【要点指导】 三视图广泛应用于零件制造、图纸设计及相关表 面 积的计算等, 这就要求我们在日常的学习、生活中多用数学
计算机图形学第五章课程提纲
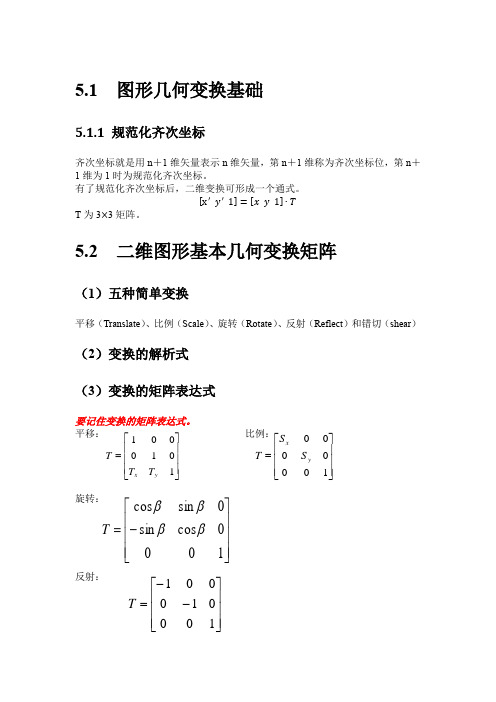
5.1 图形几何变换基础5.1.1 规范化齐次坐标齐次坐标就是用n +1维矢量表示n 维矢量,第n +1维称为齐次坐标位,第n +1维为1时为规范化齐次坐标。
有了规范化齐次坐标后,二维变换可形成一个通式。
[x ′ y ′ 1]=[x y 1]∙TT 为3×3矩阵。
5.2 二维图形基本几何变换矩阵(1)五种简单变换平移(Translate )、比例(Scale )、旋转(Rotate )、反射(Reflect )和错切(shear )(2)变换的解析式(3)变换的矩阵表达式要记住变换的矩阵表达式。
平移: 比例:旋转:反射: ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1010001y x T T T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1000000y x S S T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=1000cos sin 0sin cos ββββT ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=100010001T错切:沿x 的错切: x ′=x +cyy ′=y沿y 的错切:x ′=xy ′=bx +y(4)多边形的变换只对顶点变换。
5.3 二维复合变换复合变换的变换矩阵是简单变换矩阵的乘积相对于点的复合变换例5-1:相对于参考点Q 的旋转变换T1: 平移(-Qx, -Qy ),把Q 平移到原点T2: 绕原点旋转β角T3:平移(Qx, Qy ),把原点平移到Q相对于直线(轴)的复合变换例5-2:相对于直线y=kx+b 的复合变换T1: 平移(0, -b ),使直线过原点T2: 绕原点旋转-β角,使直线与x 轴重合T3:根据x 的反射变换T4: 绕原点旋转β角T5: 平移(0, b )⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1000101c b T n T T T P T P P 21'⋅⋅=⋅=二维仿射变换由五种简单变换或其复合变换构成的变换即仿射变换(Affine Transformation )。
CTransform 类的用法见实验二中“test”文件夹中的程序5.4 二维图形裁剪5.4.1 图形学中用到的几种坐标系世界坐标系,用户坐标系,观察坐标系,屏幕坐标系,设备坐标系5.4.2 窗口与视区5.4.3 窗视变换5.5 Cohen -Sutherland 直线裁剪算法 算法原理C3,C2,C1,C0 上 下 右 左[][]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⋅==10011''3,23,12,22,11,21,1a a a a a a y x y x算法实例。
2023年北师大版数学九年级上册5复杂图形的三视图优选课件
主视图 左视图 俯视图
讲授新课
画复杂的几何体的三视图 画一画:画出下图的四棱柱的三视图. 解析:在画视图时,看得见部分的轮廓要画成实线,看 不见部分的轮廓线要画成虚线.
主视图
左视图
俯视图
典例精析
例1 画出如图所示的几何体的三视图.
解:作法如下:
(2)确定主视图的位置,
画出主视图;
主
(3)根据“长对正”与几何 视
九年级数学上(BS) 教学课件
第五章 投影与视图
5.2 视图
第2课时 复杂图形的三视图导入新课Fra bibliotek讲授新课
当堂练习
课堂小结
学习目标
1.会辨别复杂的几何体的三视图. (重点) 2.会画复杂的几何体的三视图.(重点) 3.明确三视图中实线和虚线的区别.(难点)
导入新课
复习引入
问题:请画出下面几何图形的 三视图.
主视图
左视图
(1)
俯视图
主视图
左视图
(2)
俯视图
当堂练习
1.一个几何体的主视图和左视图如图所示,请补画这 个几何体的俯视图.
主视图
左视图
俯视图
2.一个直棱柱的主视图和俯视图如图所示.描述这
个直棱柱的形状,并补画它的左视图.
主视图
俯视图
左视图
3.下图是一个蒙古包的照片.小明认为这个蒙古包可以看 成如图所示的几何体,请画出这个几何体的三种视图.你 与小明的做法相同吗?
体宽度,画出俯视图;
图
(4)根据“高平齐”与 “宽相等”画出左视图; (5)擦去辅助线
X
俯 视 图
看不见的轮廓 线要画成虚线
Y 左 视 图
Y '
第5章 (18)教材配套课件
第五章 组合体
2.截切方式的组合体 用截切方式制作组合体,是机械加工零件的方法再现。机械加工时,就是在零件毛坯 上切削一部分材料,得到一个符合零件形状要求的结果。如图5-1(b)所示的形体,可以认为 是用图5-4所示的方法从一个立方体上切削部分材料得到的。 图5-4所示粗实线表示的是形体在切割之前的形状是一个矩形块,双点画线表示的是从 材料上切割下来的材料形状。可以看出,切割下来的材料分别是一个三棱柱、一个端面倾 斜的四棱柱和两个端面倾斜的三棱柱。 加深理解这种思维方式的最好方法就是动手操作一 遍。实际动手对一块材料进行切割,可以有效提高对形体形成过程的理解能力。
第五章 组合体
面在平面基本形体上产生的截交线为直线。曲面在基本形体上可能产生曲线截交线,投影 也可能为曲线或直线。如图5-10(b)所示,绘制正垂面截面,俯视图中多出一条图线,左视 图没有变化,擦除主视图中多余的图线;如图5-10(c) 所示,绘制形体上方的槽,主视图中 多出一条图线,左视图中绘制出梯形缺口后擦除多余的图线,在俯视图中绘制出槽的每一 个棱线以及槽与正垂截面的交线,这是三个平面分别与第一次绘制出的截面之间的交线, 再擦除多余的图线;如图5-10(d) 所示,绘制形体左侧前后两个铅垂面截面,俯视图中多出 两根斜线,出现两个三角形的缺口,图中显示的是按照铅垂面截切时的绘制思考方法,还 没有考虑切面形状,绘制截面形状的图形时,要按照平面投影的思维方法。也可以先根据 想象绘制出每个截面的轮廓,在绘制过程中,可以直接确定被截断的图线,可不绘制或擦 除。
高级计算机图形学
GKS(1980s)
IFIPS (1973) 组织了两个委员会建立图形 API的标准
GKS(Graphical Kernel System)
二维,同时包含很好的工作站模型
Core: 同时应用于二维和三维 GKS成为ISO标准,稍后成为ANSI标准(1980s)
GKS很难推广到三维(GKS-3D)
3D硬件接口 计算机游戏 Direct3D 7.0能匹敌,8.0 (2001)开始胜出
OpenGL库
OpenGL核心库(OpenGL Core Library)
Windows: OpenGL32.dll (WINDOWS\SYSTEM32)
Windows Xp支持OpenGL 1.1,Vista支持1.4 Direct3D的封装,需安装驱动来实现硬件加速
点 线段 多边形
属性函数 视图函数(或观察函数) 变换函数 控制函数 查询函数 输入及窗口函数(GLUT)
程序里需要什么
头文件
#include <GL/gl.h> #include <GL/glu.h> #include <GL/glut.h>
函数库 数据类型
为了兼容性,OpenGL定义了各种数据类型(#define) GLfloat, GLint, GLenum, etc.
顶点
只能考虑局部光照
流水线体系结构
顶点 处理器 裁剪器与 图片装配器 光栅化器 片段处理器 像素
应用程序
显示设备
所有骤都可以通过显示卡的硬件实现
4
第二章
OpenGL编程
第二章之第一节
简介
基本内容
图形 API的发展 OpenGL的体系结构
状态机 state machine
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
•
缺省的投影矩阵是单位阵
缺省投影
默认的投影是正交投影
被载剪掉
2
投影平面z=0
定义可见的对象
在缺省的照相机设置下,为了使定义的对 象可见,只要使对象的位置和尺寸与默认 视景体相匹配
• 通常可以对数据进行适当的平移和各向同性放 •
缩 注意这并不是利用OpenGL的平移和放缩函数 进行的操作
移动照相机标架
•
为了实现这些细节需要知道对象与照相机之间的关系
最终的选择
偏好对象定义与照相机定义之间的独立性 如果应用程序需要特定类型的视图,那么 应当仔细确定照相机相对于对象的位置
• 因为在透视投影中,从射影几何的角度来说,
肯定有三个灭点,只是有些灭点在无穷远
计算机视图
视图有三个功能,都在流水线结构中实现
• 照相机还可以绕VPN方向旋转
只有给出了VUP,才完全确定了照相机的 方向
VUP
不必要求VUP向量必定平行于投影 面 把VUP投影到投影平面上得到上方 向量v
• • • • •
v与n正交 设u = v x n 由(u, v, n)构成的直角坐标系称为视图 坐标系 加上VRP,构成照相机标架 实现这种变换的矩阵称为视图定向矩 阵
一种视图API
为了实现某种投影,需要经过复杂的计算得到 变换的构成 可以采用在PHIGS和GKS-3D中的方法定位照相 机 在世界标架中描述照相机的位置 投影的类型是由在OpenGL中等价的投影矩阵确 定的
• •
视图过程的这部分操作也称为规范化变换 (normalization transformation) 用标架中的变换实现
虚拟照相机
计算机视图是基于虚拟照相机模型的,原则上 可以实现所有的经典视图 所有的经典视图是基于对象、观察者和投影线 之间的紧密联系的,而在计算机图形学中强调 的则是对象定义与照相机定义之间的独立性 在OpenGL中可以指定采用的是透视投影或者 正交投影,但在透视投影中OpenGL并不知道 什么是单点、两点或三点透视
gluLookAt(0.,0.,0.,0.,0.,-100.,0.,1.,0.);
其它视图API
在OpenGL中gluLookAt()函数是唯一的专 门用来定位照相机的函数 在许多实际应用中,已有的视图定义方法 不适用
• 例如飞机操纵模拟
飞行模拟
基准点:飞行器的重心 用三个角度和对象到飞行器质心的距离来进行观察
计算机中的照相机
可以选择投影的类型和视图参数模拟镜头 的远近 绝大多数API提供不同的函数用于定义平 行投影和透视投影 OpenGL就是如此,虽然两者是在同一个 流水线体系中实现
• 用glLoadMatrix设置投影矩阵
两种照相机模型
-z -z
COP在原点,指向 z轴负方向
投影与规范化
在视点(照相机)标架中默认的投影是正 交投影 对于在默认视景体内的点,xp = x, yp = y, zp = 0 大多数图形系统应用视图规范化的过程
• 通过由投影矩阵确定的变换把所有其它的视图 •
转化为默认视图 从而可以对所有的视图采用同样的流水线体系
正交投影的齐次坐标表示
xp = x yp = y zp = 0 wp = 1
视图定位矩阵
设VRP点p = [x,y,z,1]T, 视平面法向 n = [nx,ny,nz,0]T, 上 方向量为 vup = [vupx, vupy, vupz, 0]T. v⋅n = 0 v = vup−(vup⋅n)/(n⋅n)n, 把v, n单位化 v= αn + βvup , 取β=1 u=vxn 视图定位矩阵为
u x v V= x n x 0
uy vy ny 0
uz vz nz 0
− xu x − yu y − zuz − xv x − yv y − zvz − xn x − yn y − znz 1
LookAt()函数
在GLU库中包含了函数gluLookAt(),提供了 创建定位照相机所用的模型-视图矩阵的简单 方法 注意在设置中需要一个向上的方向 需要初始化,即加载单位阵
模型-视图矩阵
模型-视图矩阵是OpenGL状态的一部分 任何时刻的模型-视图矩阵包含了照相机标架与世界 标架的位置关系 虽然表面上看把模型与视图矩阵结合为一个矩阵会导 致一些混淆,但仔细体会这种流水线体系就会发现其 中的优势 如果把照相机也看作具有几何属性的对象,那么改变 对象位置和定向的变换当然对照相机的位置和定向相 对于其它对象也发生改变 可以认为在定义真正对象之前的模型-视图变换是定 位照相机
• 无法从投影点恢复原来的点
投影流水线
在模型-视图矩阵后应用4x4的投影矩阵实现简 单的投影,但在最后需要进行透视除法 透视除法可以成为流水线的一部分
模型-视图
投影
透视除法
视角(angle of view)
视角
相机属性:透镜焦距和底片尺寸 只有位于视角内的对象才会出现在 照片中
视景体
若底片是矩形的,那么由视角张成一个半无穷 的棱椎体,这称为视景体
•
也可以与模型变换复合在一起
例如:平行于轴的立方体的正等轴测投影
glMatrixMode(GL_MODELVIEW); glLoadIdentity(); gluLookAt(1.,1.,1.,0.,0.,0.,0.,1.,0.);
gluLookAt()
gluLookAt(eyex, eyey, eyez, atx, aty, atz, upx, upy, upz);
高级计算机图形学
中国科学技术大学计算机学院 黄章进 zhuang@
经典视图
视图中需要三个基本要素
• • •
一个或多个对象 观察者,带有一个投影面 从对象到投影平面的投影线 观察者选取一个对象并进行定向,确定希望看到的结果
经典视图就是基于这些要素之间的关系的
•
平面几何投影的分类图
如何构造正等轴测投影
假设从中心在原点的立方体开始,立方体 平行于坐标轴 希望变换立方体得到该立方体的正等轴测 投影
• 首先绕y轴旋转45度 • 然后绕x轴旋转35.26度 • 最后从原点移开
构造正等轴测投影
绕y轴逆时针旋转45 °, (-1,1,1)变换到(0,1, 21/2) 绕x轴逆时针旋转35.26 ° ,(0,1, 21/2)变换到(0,0, 31/2) (-1,1,1) 旋转矩阵: R = Rx(35.26 °)Ry(45 °)
考虑顶部与侧边视图
齐次坐标形式
p = Mq
1 0 M= 0 0
0 0 1 0 0 1 0 1/ d
0 0 0 0
x y q= z 1
⇒
x y p= z z / d
透视除法
如果w ≠ 1, 那么必须从齐次坐标中除以w而得到 所表示的点 这就是透视除法,结果为
平面几何投影
平行投影
透视投影
多视点正 交投影
轴测投影 axonometric
斜投影 oblique
单点
两点
三点
正等轴测 正二轴测 正三轴测 isometric dimetric trimetric
第五章之第二节
计算机视图
基本内容
介绍投影的数学表示 介绍OpenGL中的视图函数 其它类型API中的视图功能
VPN = at – eye eye: 视点, VRP at: 参考点 gluLookAt(1.,1.,1.,0.,0.,0.,0.,1.,0.);
gluLookAt()与其它变换
默认情况下照相机的设置: 用户可以自己定义模型-视图矩阵实现同 样的功能 但是从概念上可以把gluLookAt()作为照相 机的定位(视图变换),而把后续的其它变 换作为对象的定位(模型变换)
(0,1,21/2)
OpenGL代码
注意最后指定的变换是最先被应用
glMatrixMode(GL_MODELVIEW); glLoadIdentity(); glTranslated(0.0, 0.0, -d); glRotated(35.26, 1.0, 0.0, 0.0); glRotated(45, 0.0, 1.0, 0.0);
星空观察
采用极坐标 点在天空中的位置指 定
• • •
方向由方位角和仰角定 义 观察者所在的平面,即 法向n 照相机还可以绕视线方 向旋转,称为扭转角 (twist angle)
仰角 elevation
方位角 azimuth
OpenGL代码:极坐标视图
照相机绕一个位于原点的物体做轨道运动
• distance:轨道半径(照相机与原点的距离)
• • •
其顶点就是COP 但实际的视景体通常 有前后裁剪面 不在视景体内的 物体被裁剪掉
视景体
视 图 平 面
前 裁 剪 面
x xp = , z/d y yp = , zp = d z/d
上述方程称为透视方程 后面会用OpenGL函数考虑相应的裁剪体
透视变换
透视除法是非线性的,导致非均匀缩短
• 离COP远的对象投影后尺寸缩短得比离COP近
的对象大
透视变换是保直线的,但不是仿射变换 透视变换是不可逆的,因为沿一条投影直 线上的所有点投影后的结果相同
侧滚 Roll
俯仰 Pitch