小角度计算旋转中心
数字的旋转掌握形的旋转变换和角度计算
数字的旋转掌握形的旋转变换和角度计算数字的旋转:掌握形的旋转变换和角度计算数字的旋转是在数学中常见的一种变换方式,通过旋转操作,可以改变数字的位置和方向。
本文将介绍数字的旋转变换和角度计算的相关概念和方法。
一、数字旋转的基本概念数字的旋转是指将一个数字按照一定的角度围绕某个旋转中心旋转,从而改变数字的位置和方向。
在数字旋转中,有以下几个基本概念需要了解:1. 旋转中心:旋转操作的中心点,数字围绕旋转中心进行旋转。
旋转中心可以是数字自身的某个点,也可以是平面上的其他点。
2. 角度:指旋转操作的角度大小,角度通常用度数或弧度表示。
在数字旋转中,角度决定了数字旋转的程度和方向。
3. 旋转方向:旋转操作可以顺时针或逆时针进行。
旋转方向会影响数字最终的位置和方向。
二、数字旋转的变换方式数字的旋转可以通过数学中的旋转变换来实现。
旋转变换是一种刚体变换,它通过保持点之间的距离和位置关系,来改变点的位置和方向。
在数字旋转中,常用的旋转变换方式有以下几种:1. 顺时针旋转:顺时针旋转是指数字按照顺时针方向围绕旋转中心旋转。
顺时针旋转可以通过坐标变换的方式来实现,可以将旋转中心作为坐标原点,然后根据旋转角度进行坐标变换,从而得到旋转后的坐标。
2. 逆时针旋转:逆时针旋转是指数字按照逆时针方向围绕旋转中心旋转。
逆时针旋转也可以通过坐标变换的方式来实现,通过相反的角度和坐标变换公式,实现数字的逆时针旋转。
3. 多点旋转:如果数字由多个点组成,则可以对每个点进行独立的旋转操作,从而实现数字的整体旋转。
三、角度计算的方法在数字的旋转中,角度计算是一个重要的环节。
角度计算可以帮助我们确定旋转的度数或弧度,从而准确地进行数字旋转。
下面介绍几种常用的角度计算方法:1. 角度的度数表示:角度可以用度数进行表示,一周共有360度。
通过度数可以确定旋转的程度,例如,90度表示右旋90度,180度表示翻转,270度表示左旋90度等。
2. 角度的弧度表示:角度也可以用弧度进行表示,一周共有2π弧度。
绕某点旋转坐标公式(一)

绕某点旋转坐标公式(一)绕某点旋转坐标公式在数学几何学中,我们经常需要将一个点或一个形状绕一个固定的点旋转一定的角度。
为了方便计算,我们引入了绕某点旋转坐标公式,通过该公式,我们可以快速计算出旋转后的新坐标。
旋转公式的基本概念•旋转中心:确定旋转中心的点,通常用P(x0,y0)表示,其中x0表示横坐标,y0表示纵坐标。
•旋转角度:表示旋转的角度,通常用θ表示,单位为弧度。
二维平面上的旋转公式对于二维平面上的点P(x,y),绕旋转中心P0(x0,y0)逆时针旋转θ角度后的新坐标P’(x’,y’)可以通过以下公式计算得到:x' = (x - x0) * cosθ - (y - y0) * sinθ + x0y' = (x - x0) * sinθ + (y - y0) * cosθ + y0其中,cosθ表示θ角的余弦值,sinθ表示θ角的正弦值。
举例说明假设有一个坐标点P(2,3),我们想将其绕坐标原点逆时针旋转45度。
根据上述公式,我们可以进行如下的计算:x0 = 0y0 = 0θ = π/4x = 2y = 3x' = (2 - 0) * cos(π/4) - (3 - 0) * sin(π/4) + 0 =y' = (2 - 0) * sin(π/4) + (3 - 0) * cos(π/4) + 0 = 因此,点P(2,3)绕坐标原点逆时针旋转45度后的新坐标为P’(,)。
这个公式在计算机图形学中非常常用,可以实现图像的旋转、平移等操作,让我们的视觉效果更加生动和多样化。
总结绕某点旋转坐标公式是计算机图形学中重要的数学工具,通过这个公式,我们可以轻松计算出旋转后的新坐标。
在实际应用中,我们可以根据需求来灵活运用这个公式,实现各种有趣的效果。
机器视觉旋转中心三点算法__概述说明以及解释

机器视觉旋转中心三点算法概述说明以及解释1. 引言1.1 概述机器视觉是计算机科学和工程技术领域中的一个重要研究分支,它通过模拟人类视觉系统来使计算机能够感知和理解图像或视频。
机器视觉旋转中心三点算法是这一领域中的一种重要算法,它主要用于确定图像或视频中物体的旋转中心,进而实现对物体的定位和姿态识别。
在传统的机器视觉旋转中心算法中,常常需要使用多个标定点或复杂的标定板来进行标定,从而得到旋转参数。
然而,在真实应用中获取准确且稳定的标定数据并不容易,因此亟需一种简化且可靠的方法来解决这个问题。
机器视觉旋转中心三点算法就是为了满足这一需求而提出的新方法。
1.2 文章结构本文将围绕着机器视觉旋转中心三点算法展开讨论。
首先,在第二部分将介绍该算法的原理、步骤以及应用场景;接下来,在第三部分将对该算法进行概述说明,包括介绍什么是机器视觉旋转中心三点算法、算法的背景与意义以及算法的特点与优势;然后,在第四部分将详细解释算法的具体实现细节、关键步骤和思路,并通过实例演示和案例分析对其进行进一步说明;最后,在第五部分中将对整篇文章进行结论总结,并展望未来该领域的研究方向和发展趋势。
1.3 目的机器视觉旋转中心三点算法在工业生产、医学影像、智能安防等领域具有广泛应用前景。
本文旨在提供一个全面的概述,以便读者可以更深入地理解该算法的原理和应用,并为相关领域的研究人员和工程师提供参考和启发。
通过本文,我们希望能够促进机器视觉旋转中心三点算法在实际应用中的推广和发展,从而进一步推动机器视觉技术的发展和创新。
2. 机器视觉旋转中心三点算法2.1 算法原理机器视觉旋转中心三点算法是一种用于确定物体旋转中心的方法。
其原理基于物体在不同角度下的投影信息,通过分析三个关键投影点的位置和特征来确定旋转中心。
该算法利用了图像处理和几何分析技术,可以在没有先验知识的情况下进行准确的旋转中心确定。
2.2 算法步骤这里将介绍机器视觉旋转中心三点算法的主要步骤:步骤1:获取原始图像和目标物体。
旋转的计算与证明
旋转的计算与证明旋转是几何学中非常重要的一个概念,它可以用来描述物体绕一些中心轴或中心点旋转的过程。
在计算与证明旋转相关的问题时,我们需要使用到一系列的数学工具和方法。
本文将从旋转的定义开始,逐步介绍旋转的计算与证明过程。
旋转的定义旋转可以定义为平面上一个点或一个物体绕一些中心点或中心轴旋转的过程。
旋转可以使点或物体的位置、形状或方向发生变化。
旋转可以分为顺时针旋转和逆时针旋转两种。
旋转的中心旋转的中心可以是平面上的一个点或一个物体。
以点为中心进行旋转时,可以通过计算旋转中心与待旋转点之间的距离和角度来确定旋转后的新位置。
以物体为中心进行旋转时,可以通过计算物体自身的几何信息(例如边界点、顶点等)和旋转角度来确定旋转后的新形状。
旋转的角度旋转的角度通常用弧度来表示。
弧度是一种角度的计量单位,定义为角度所对应的弧长与半径的比值。
旋转的角度可以是正值、负值或零。
旋转的方向旋转的方向可以是顺时针或逆时针。
顺时针旋转是指从从正方向看旋转的物体顺时针方向旋转;逆时针旋转是指从从正方向看旋转的物体逆时针方向旋转。
在计算旋转时,需要根据具体的问题条件确定旋转的方向。
点的旋转是指一个点绕旋转中心进行旋转。
点的旋转可以通过以下公式进行计算:x' = x * cos(θ) - y * sin(θ)y' = x * sin(θ) + y * cos(θ)其中,(x,y)为原始点的坐标,(x',y')为旋转后点的坐标,θ为旋转角度。
物体的旋转是指一个物体绕旋转中心进行旋转。
物体的旋转可以通过以下步骤进行计算:1.将物体的每个点(顶点或边界点)的坐标通过点的旋转公式计算旋转后的位置。
2.根据计算得到的新位置,重新构建物体的形状。
旋转的证明旋转的证明可以通过使用向量和矩阵的方法进行推导。
以下是旋转的一般证明方法:1.定义旋转矩阵旋转矩阵是一个正交矩阵,用于描述旋转的变换。
旋转矩阵可以通过旋转角度来确定,其中旋转角度可以是弧度或角度。
CT旋转中心的精确确定方法

预备知识
预备知识
CT成像的基本原理是利用X射线穿透人体组织,不同组织对X射线的吸收程度 不同,导致探测器接收到的信号强度有所改变。通过对这些信号进行处理和计算, 可以重建出人体内部的二维图像。为了获得完整的三维图像,需要围绕人体旋转 CT设备,并从多个角度采集数据。
方法与步骤
1、选择合适的定位方法
基于特征定位的方法则是通过提取图像中的特征来确定旋转中心。这些特征 可以是病变区域、器官或特定的骨骼结构等。医生可以通过手动或自动的方式提 取这些特征,并计算出旋转中心的位置。
2、提取感兴趣区域
2、提取感兴趣区域
确定CT旋转中心需要先提取感兴趣区域,即需要进行定位的特定区域。这个 区域可以是病变区域或感兴趣的器官。为了提取感兴趣区域,医生需要先对原始 图像进行预处理,如去噪、平滑等,以突出显示目标区域。然后,医生可以利用 图像处理技术(如边缘检测、阈值分割等)来提取感兴趣区域。
3、确定CT旋转中心
3、确定CT旋转中心
提取到感兴趣区域后,医生需要根据该区域的特征来计算CT旋转中心的位置。 通常情况下,旋转中心被定义为感兴趣区域的重心或形心。医生可以通过以下步 骤来确定旋转中心形心, 确定旋转中心的位置
2、根据计算得到的质心或形心,确定旋转中心的位置
一、背景与问题
一、背景与问题
工业CT系统是一种用于检测物体内部结构及物理特性的无损检测技术。该技 术利用X射线源和探测器对物体进行多角度的扫描,并通过计算机断层扫描技术 重建物体内部的3D结构。然而,准确地确定转台的旋转中心是一个重要的问题。 如果旋转中心的位置不准确,那么重建的3D结构可能会出现偏差,影响检测结果 的准确性。
内容摘要
接下来,利用计算机视觉中的模板匹配技术,将这些特征与预先定义的模板 进行匹配,以确定旋转中心的位置。通过不断调整模板的位置和大小,直到找到 最佳匹配的位置,即可以确定出旋转中心。
九年级几何旋转知识点归纳总结
九年级几何旋转知识点归纳总结几何学是数学中非常重要的一个分支,而几何旋转是其中一个关键的概念。
在九年级的几何学学习中,我们需要掌握几何旋转的相关知识以及应用。
本文将对九年级几何旋转的知识点进行归纳总结,帮助同学们更好地理解和记忆。
一、几何旋转的基本概念几何旋转是指图形在平面内绕着某一点或某一直线旋转一定角度后所得的新图形。
在几何旋转中,我们通常需要了解以下几个基本概念:1. 旋转中心:旋转中心是指图形旋转时所围绕的中心点。
旋转中心可以是一个点,也可以是一个线段的中点或一条直线。
2. 旋转角度:旋转角度是指图形旋转的角度大小,用度数或弧度表示。
通常我们使用正角度表示顺时针旋转,负角度表示逆时针旋转。
3. 旋转轴:旋转轴是指图形绕其旋转的直线,可以是水平、垂直或者倾斜的。
二、常见几何旋转的性质和规律几何旋转具有一些特定的性质和规律,掌握这些性质和规律可以帮助我们解决几何旋转相关的问题。
下面是几个重要的几何旋转性质和规律:1. 旋转中心与图形顶点的距离保持不变:无论图形如何旋转,旋转中心与图形的各个顶点之间的距离保持不变。
2. 旋转角度和旋转方向的关系:当图形按顺时针方向旋转时,旋转角度为正;当图形按逆时针方向旋转时,旋转角度为负。
3. 不同图形的旋转:不同图形在旋转过程中会有不同的性质。
例如,正方形旋转180度后仍然是正方形,而圆旋转360度后又回到原位。
4. 旋转与识别:通过观察图形的旋转特点,可以识别出某些对称图形。
例如,正五边形沿内切圆旋转一定角度后,可以再次得到正五边形。
三、常见几何旋转的应用除了理解几何旋转的基本概念和性质外,我们还需要掌握几何旋转的应用。
下面是一些常见的几何旋转应用:1. 图形的旋转对称性:通过对图形进行旋转可以识别和绘制图形的旋转对称性。
例如,正n边形(n为偶数)具有旋转对称性。
2. 平面图形的构造:通过几何旋转可以构造各种各样的平面图形。
例如,我们可以通过旋转一个相等边长的正方形来构造正六边形。
九年级旋转知识点梳理

九年级旋转知识点梳理在九年级的学习过程中,我们已经学习了许多不同的知识点。
为了更好地巩固所学的知识,并为即将到来的中考做好准备,我们有必要对这些知识点进行整理和梳理。
接下来,我将为大家梳理一些重要的旋转知识点。
一、坐标系和旋转我们先来回顾一下坐标系和旋转的基本概念。
在平面直角坐标系中,我们可以通过横坐标和纵坐标来表示一个点的位置。
而旋转是指将一个图形按照某个点为中心进行旋转,通常我们称这个点为旋转中心。
旋转可以按照顺时针或逆时针的方向进行,旋转角度可以是任意角度。
二、基本旋转公式在进行旋转的计算中,我们需要掌握一些基本的旋转公式。
其中,顺时针旋转公式和逆时针旋转公式分别为:1. 顺时针旋转公式:旋转后的横坐标 = 旋转中心横坐标 + (原点横坐标 - 旋转中心横坐标) * cosθ - (原点纵坐标 - 旋转中心纵坐标) * sinθ旋转后的纵坐标 = 旋转中心纵坐标 + (原点横坐标 - 旋转中心横坐标) * sinθ + (原点纵坐标 - 旋转中心纵坐标) * cosθ2. 逆时针旋转公式:旋转后的横坐标 = 旋转中心横坐标 + (原点横坐标 - 旋转中心横坐标) * cosθ + (原点纵坐标 - 旋转中心纵坐标) * sinθ旋转后的纵坐标 = 旋转中心纵坐标 - (原点横坐标 - 旋转中心横坐标) * sinθ + (原点纵坐标 - 旋转中心纵坐标) * cosθ这些公式可以帮助我们在旋转图形时计算出旋转后的坐标。
三、旋转的性质旋转具有一些特殊的性质,我们可以通过这些性质来解决与旋转相关的问题。
下面列举几个常见的旋转性质:1. 旋转180°:图形绕旋转中心旋转180°后,各点对应的坐标变为相反数。
2. 旋转90°或270°:图形绕旋转中心旋转90°或270°后,各点的横纵坐标交换,并且横坐标的符号取反。
3. 旋转60°或300°:图形绕旋转中心旋转60°或300°后,各点对应的坐标可以通过一定的规律得到。
初一三角形旋转题解题技巧

初一三角形旋转题解题技巧
初一数学中,三角形旋转是一个常见的题型。
在解决这类问题时,我们需要掌握一些技巧,下面就来一起学习一下。
首先,我们需要了解一个概念:旋转中心。
旋转中心就是三角形绕着旋转中心旋转,由于旋转后三角形的形状不变,因此我们可以从一个角度去解决旋转后的三角形问题。
其次,我们需要掌握旋转角度的计算方法。
通常旋转角度都是90度、180度和270度。
当旋转角度为90度时,我们可以将旋转中心设在三角形某个角上,并将另外两个点分别旋转90度,得到的三角形仍然与原来的三角形相似,只是位置不同。
当旋转角度为180度时,我们可以将旋转中心设在三角形某个边的中点上,并将另外两个点分别旋转180度,得到的三角形与原来的三角形完全重合。
当旋转角度为270度时,我们可以将旋转中心设在三角形某个角上,并将另外两个点分别旋转270度,得到的三角形仍然与原来的三角形相似,只是位置不同。
最后,我们需要掌握旋转后坐标的计算方法。
当旋转角度为90度时,我们可以通过将点坐标交换并取相反数得到旋转后的坐标。
当旋转角度为180度时,我们可以通过将点坐标取相反数得到旋转后的坐标。
当旋转角度为270度时,我们可以通过将点坐标交换并取相反数得到
旋转后的坐标。
综上所述,初一三角形旋转题解题技巧包括了掌握旋转中心、旋转角度的计算方法以及旋转后坐标的计算方法。
只要掌握了这些技巧,我们就可以轻松解决这类问题。
初中几何旋转解题技巧

初中几何旋转解题技巧引言几何学作为数学的一个重要分支,是初中数学教育中不可或缺的一部分。
而在几何学中,旋转是一种常见的变换方式。
通过旋转,我们可以改变图形的位置、形状和方向,从而解决与旋转相关的问题。
本文将介绍初中几何中常见的旋转解题技巧。
什么是旋转在几何学中,旋转是指将一个图形绕着某个点或某条线进行转动,使得图形保持形状不变但位置发生改变的操作。
我们可以通过角度来描述旋转的程度,常用单位为度(°)或弧度(rad)。
旋转解题技巧1. 确定旋转中心在解决旋转问题时,首先需要确定一个旋转中心。
这个中心可以是图形内部的一个点,也可以是图形外部的一个点。
根据问题给出的条件来选择合适的旋转中心。
2. 确定旋转方向确定了旋转中心后,接下来需要确定旋转方向。
根据问题描述和图形特点来判断顺时针还是逆时针方向进行旋转。
3. 确定旋转角度旋转角度是解决旋转问题的关键。
根据问题给出的条件,确定旋转角度。
常见的旋转角度有90°、180°和360°等。
4. 应用旋转公式在确定了旋转中心、旋转方向和旋转角度后,我们可以根据几何学中的旋转公式来解题。
以下是常见的几个旋转公式:•绕原点逆时针旋转θ°:对于坐标(x, y),其逆时针旋转θ°后的新坐标为(x cosθ - y sinθ, x sinθ + y cosθ)。
•绕原点顺时针旋转θ°:对于坐标(x, y),其顺时针旋转θ°后的新坐标为(x cosθ + y sinθ, -x sinθ + y cosθ)。
•绕任意点逆时针旋转θ°:先将图形平移使得旋转中心位于原点,然后按照绕原点逆时针旋转的方式计算新坐标,最后再将图形平移回原来位置。
5. 注意坐标变换在应用上述旋转公式进行计算时,需要注意坐标变换。
通常情况下,我们使用直角坐标系进行计算,在计算过程中需要将问题中给出的坐标转换为直角坐标系下的坐标,最后再将计算得到的坐标转换回原来的坐标系。
三角形的旋转与角度计算
三角形的旋转与角度计算三角形是几何学中的基本图形之一,它由三个边和三个角组成。
在实际应用中,我们经常需要进行三角形的旋转和角度计算,以满足不同的需求。
本文将探讨三角形旋转的概念和方法,并介绍如何计算旋转后的角度。
一、三角形的旋转概念三角形的旋转是指将整个三角形绕一个旋转中心按一定角度旋转,从而得到新的三角形位置和形状的过程。
旋转可以是顺时针或逆时针方向的,旋转中心可以是三角形的顶点、质心或其他点。
二、三角形的旋转方法1. 绕顶点旋转当我们以三角形的某个顶点为中心进行旋转时,可以通过以下步骤来完成:(1)确定旋转中心,即选择一个顶点作为旋转中心;(2)确定旋转角度,即要把三角形旋转多少度;(3)按照选择的顶点为中心和确定的旋转角度,计算出旋转后的每个顶点的坐标。
2. 绕质心旋转三角形的质心是三条中线的交点,将质心作为旋转中心进行旋转,可以通过以下步骤来完成:(1)计算出三角形的质心坐标;(2)确定旋转角度,即要把三角形旋转多少度;(3)按照质心为中心和确定的旋转角度,计算出旋转后的每个顶点的坐标。
3. 绕其他点旋转除了顶点和质心外,我们还可以选择其他点作为旋转中心。
具体的旋转方法如下:(1)确定旋转中心,即选择一个非顶点、非质心的点作为旋转中心;(2)确定旋转角度,即要把三角形旋转多少度;(3)按照选择的旋转中心和确定的旋转角度,计算出旋转后的每个顶点的坐标。
三、角度计算在进行三角形旋转的过程中,我们还需要计算旋转后的角度。
角度计算可以通过以下步骤来进行:(1)确定顶点的坐标变化;(2)利用向量叉积的性质来计算旋转角度。
四、实例演示假设有一个三角形ABC,其中顶点坐标分别为A(2,4),B(5,6),C(7,8)。
现在要将该三角形绕点A逆时针旋转30度,计算旋转后的三角形的坐标和旋转角度。
首先,我们需要确定旋转后的每个顶点的坐标。
以点A为中心逆时针旋转30度后,顶点B的坐标变为(3.39, 5.10),顶点C的坐标变为(3.23, 8.46)。
旋转定理的概念
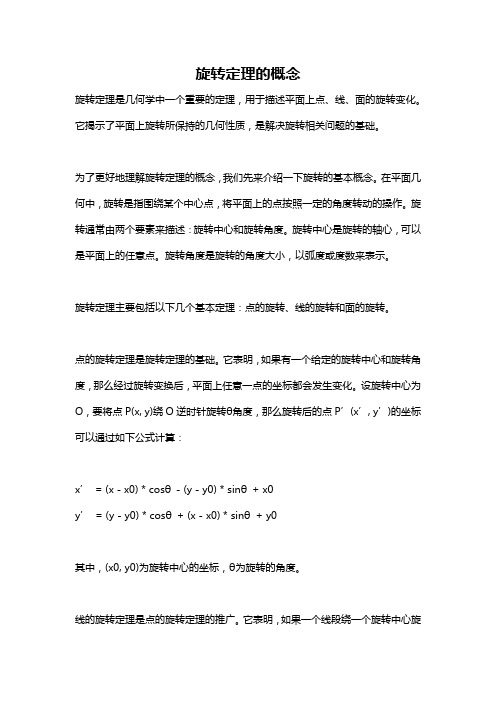
旋转定理的概念旋转定理是几何学中一个重要的定理,用于描述平面上点、线、面的旋转变化。
它揭示了平面上旋转所保持的几何性质,是解决旋转相关问题的基础。
为了更好地理解旋转定理的概念,我们先来介绍一下旋转的基本概念。
在平面几何中,旋转是指围绕某个中心点,将平面上的点按照一定的角度转动的操作。
旋转通常由两个要素来描述:旋转中心和旋转角度。
旋转中心是旋转的轴心,可以是平面上的任意点。
旋转角度是旋转的角度大小,以弧度或度数来表示。
旋转定理主要包括以下几个基本定理:点的旋转、线的旋转和面的旋转。
点的旋转定理是旋转定理的基础。
它表明,如果有一个给定的旋转中心和旋转角度,那么经过旋转变换后,平面上任意一点的坐标都会发生变化。
设旋转中心为O,要将点P(x, y)绕O逆时针旋转θ角度,那么旋转后的点P’(x’, y’)的坐标可以通过如下公式计算:x’= (x - x0) * cosθ- (y - y0) * sinθ+ x0y’= (y - y0) * cosθ+ (x - x0) * sinθ+ y0其中,(x0, y0)为旋转中心的坐标,θ为旋转的角度。
线的旋转定理是点的旋转定理的推广。
它表明,如果一个线段绕一个旋转中心旋转,那么旋转后的线段仍然是直线段,并且其长度保持不变。
这意味着,旋转是一个保长度的变换。
设旋转中心为O,旋转角度为θ,线段的两个端点分别为A 和B,那么旋转后的线段的两个端点分别为A’和B’,且满足以下关系:A’= (A - O) * cosθ- (A - O) * sinθ+ OB’= (B - O) * cosθ- (B - O) * sinθ+ O面的旋转定理是点和线的旋转定理的进一步推广。
它表明,如果一个平面图形绕一个旋转中心旋转,那么旋转后的图形仍然是平面图形,并且保持其形状不变。
设旋转中心为O,旋转角度为θ,图形的坐标表示为(x, y),那么旋转后的图形的坐标表示可以通过如下公式计算:x’= (x - x0) * cosθ- (y - y0) * sinθ+ x0y’= (y - y0) * cosθ+ (x - x0) * sinθ+ y0旋转定理的概念和公式看起来可能很抽象,但实际上它们在几何学中有着广泛的应用。
角旋转问题初一压轴题
角旋转问题初一压轴题
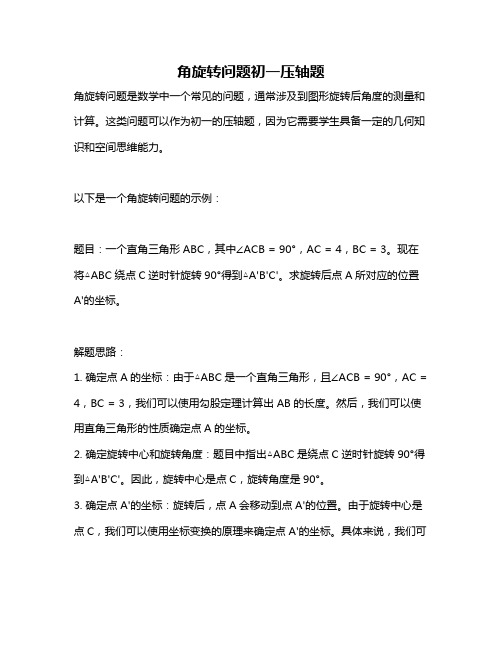
角旋转问题是数学中一个常见的问题,通常涉及到图形旋转后角度的测量和计算。
这类问题可以作为初一的压轴题,因为它需要学生具备一定的几何知识和空间思维能力。
以下是一个角旋转问题的示例:
题目:一个直角三角形ABC,其中∠ACB = 90°,AC = 4,BC = 3。
现在将△ABC绕点C逆时针旋转90°得到△A'B'C'。
求旋转后点A所对应的位置A'的坐标。
解题思路:
1. 确定点A的坐标:由于△ABC是一个直角三角形,且∠ACB = 90°,AC = 4,BC = 3,我们可以使用勾股定理计算出AB的长度。
然后,我们可以使用直角三角形的性质确定点A的坐标。
2. 确定旋转中心和旋转角度:题目中指出△ABC是绕点C逆时针旋转90°得到△A'B'C'。
因此,旋转中心是点C,旋转角度是90°。
3. 确定点A'的坐标:旋转后,点A会移动到点A'的位置。
由于旋转中心是点C,我们可以使用坐标变换的原理来确定点A'的坐标。
具体来说,我们可
以将点A的坐标减去旋转中心的坐标,然后加上旋转后旋转中心的坐标,得到点A'的坐标。
这个问题需要学生具备一定的几何知识和空间思维能力,以理解图形旋转的概念和性质,并能够运用坐标变换的原理来解决问题。
通过解决这类问题,学生可以加深对图形旋转的理解,提高他们的几何思维能力和问题解决能力。
高中物理旋转圆技巧
高中物理旋转圆技巧
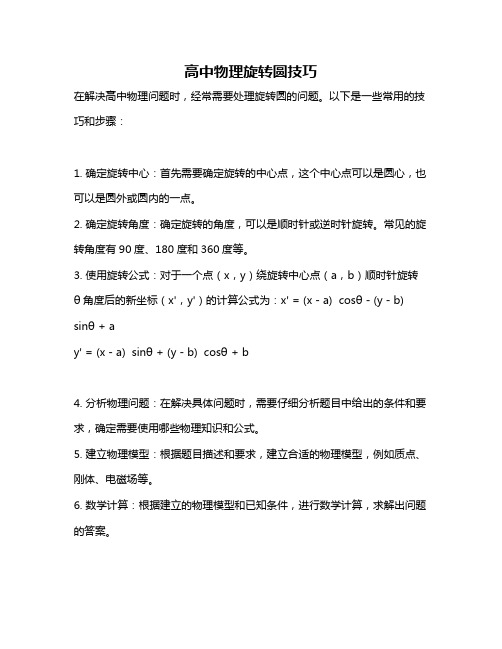
在解决高中物理问题时,经常需要处理旋转圆的问题。
以下是一些常用的技巧和步骤:
1. 确定旋转中心:首先需要确定旋转的中心点,这个中心点可以是圆心,也可以是圆外或圆内的一点。
2. 确定旋转角度:确定旋转的角度,可以是顺时针或逆时针旋转。
常见的旋转角度有90度、180度和360度等。
3. 使用旋转公式:对于一个点(x,y)绕旋转中心点(a,b)顺时针旋转θ角度后的新坐标(x',y')的计算公式为:x' = (x - a) cosθ - (y - b) sinθ + a
y' = (x - a) sinθ + (y - b) cosθ + b
4. 分析物理问题:在解决具体问题时,需要仔细分析题目中给出的条件和要求,确定需要使用哪些物理知识和公式。
5. 建立物理模型:根据题目描述和要求,建立合适的物理模型,例如质点、刚体、电磁场等。
6. 数学计算:根据建立的物理模型和已知条件,进行数学计算,求解出问题的答案。
7. 验证答案:最后需要验证所得答案的正确性,可以通过计算或实验等方式进行验证。
总之,解决高中物理旋转圆问题需要综合运用物理知识和数学工具,通过仔细分析、建立模型、计算和验证等步骤,逐步推导出正确的答案。
旋转盘中心计算公式

旋转盘中心计算公式旋转盘是一种常见的机械装置,它通过旋转来实现各种功能,比如用于测量角度、控制机械运动等。
在工程和物理学中,我们经常需要计算旋转盘中心的位置和速度,以便设计和分析各种机械系统。
本文将介绍旋转盘中心的计算公式及其应用。
首先,我们来看一下旋转盘的基本结构和运动规律。
旋转盘通常由一个固定的中心轴和一个围绕中心轴旋转的圆盘组成。
圆盘上通常有一些标记或刻度,用于测量旋转角度。
当圆盘绕中心轴旋转时,我们可以用角度来描述它的位置,通常用弧度来表示。
此外,我们还可以用时间来描述旋转盘的运动,从而得到旋转盘中心的速度和加速度。
旋转盘中心的位置可以用以下公式来计算:\[ x = r \cdot cos(\theta) \]\[ y = r \cdot sin(\theta) \]其中,\( x \) 和 \( y \) 分别表示旋转盘中心的横纵坐标,\( r \) 表示旋转盘的半径,\( \theta \) 表示旋转角度。
这两个公式描述了旋转盘中心在平面直角坐标系中的位置,通过给定旋转角度和半径,我们可以计算出旋转盘中心的具体位置。
除了位置,我们还可以计算旋转盘中心的速度和加速度。
旋转盘中心的速度可以用以下公式来计算:\[ v = r \cdot \omega \]其中,\( v \) 表示旋转盘中心的速度,\( \omega \) 表示旋转盘的角速度。
这个公式告诉我们,旋转盘中心的速度与旋转盘的半径和角速度成正比,通过给定这两个参数,我们可以计算出旋转盘中心的速度。
旋转盘中心的加速度可以用以下公式来计算:\[ a = r \cdot \alpha \]其中,\( a \) 表示旋转盘中心的加速度,\( \alpha \) 表示旋转盘的角加速度。
这个公式告诉我们,旋转盘中心的加速度与旋转盘的半径和角加速度成正比,通过给定这两个参数,我们可以计算出旋转盘中心的加速度。
通过上面的公式,我们可以计算出旋转盘中心的位置、速度和加速度,这些参数对于设计和分析各种机械系统非常重要。
旋转中心和旋转角的定义
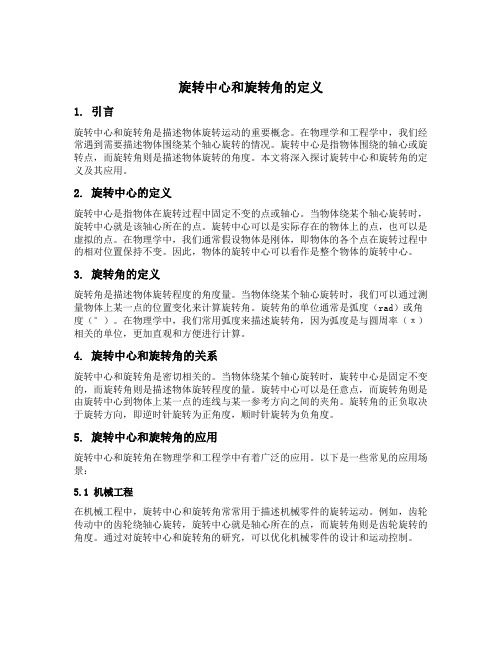
旋转中心和旋转角的定义1. 引言旋转中心和旋转角是描述物体旋转运动的重要概念。
在物理学和工程学中,我们经常遇到需要描述物体围绕某个轴心旋转的情况。
旋转中心是指物体围绕的轴心或旋转点,而旋转角则是描述物体旋转的角度。
本文将深入探讨旋转中心和旋转角的定义及其应用。
2. 旋转中心的定义旋转中心是指物体在旋转过程中固定不变的点或轴心。
当物体绕某个轴心旋转时,旋转中心就是该轴心所在的点。
旋转中心可以是实际存在的物体上的点,也可以是虚拟的点。
在物理学中,我们通常假设物体是刚体,即物体的各个点在旋转过程中的相对位置保持不变。
因此,物体的旋转中心可以看作是整个物体的旋转中心。
3. 旋转角的定义旋转角是描述物体旋转程度的角度量。
当物体绕某个轴心旋转时,我们可以通过测量物体上某一点的位置变化来计算旋转角。
旋转角的单位通常是弧度(rad)或角度(°)。
在物理学中,我们常用弧度来描述旋转角,因为弧度是与圆周率(π)相关的单位,更加直观和方便进行计算。
4. 旋转中心和旋转角的关系旋转中心和旋转角是密切相关的。
当物体绕某个轴心旋转时,旋转中心是固定不变的,而旋转角则是描述物体旋转程度的量。
旋转中心可以是任意点,而旋转角则是由旋转中心到物体上某一点的连线与某一参考方向之间的夹角。
旋转角的正负取决于旋转方向,即逆时针旋转为正角度,顺时针旋转为负角度。
5. 旋转中心和旋转角的应用旋转中心和旋转角在物理学和工程学中有着广泛的应用。
以下是一些常见的应用场景:5.1 机械工程在机械工程中,旋转中心和旋转角常常用于描述机械零件的旋转运动。
例如,齿轮传动中的齿轮绕轴心旋转,旋转中心就是轴心所在的点,而旋转角则是齿轮旋转的角度。
通过对旋转中心和旋转角的研究,可以优化机械零件的设计和运动控制。
5.2 物理学在物理学中,旋转中心和旋转角被广泛应用于描述刚体的旋转运动。
刚体是指物体的各个点在旋转过程中的相对位置保持不变。
通过研究旋转中心和旋转角,可以深入理解刚体的旋转运动规律,例如角动量守恒定律和角速度的计算等。
旋转轴和旋转角计算公式
旋转轴和旋转角计算公式一、引言在几何学和物理学中,旋转是一种常见的运动方式。
对于一个物体绕某个轴旋转的情况,我们可以通过旋转轴和旋转角来描述和计算这个旋转过程。
本文将介绍旋转轴和旋转角的概念,并给出相应的计算公式。
二、旋转轴的概念旋转轴是指物体在旋转过程中围绕的一条直线。
这条直线可以是物体的任意一条直线,如物体的对称轴、几何中心轴等。
旋转轴的选取通常取决于具体问题的要求。
三、旋转角的概念旋转角是指物体在旋转过程中所转过的角度。
旋转角可以用弧度或角度来表示,其中弧度是更常用的单位。
旋转角的大小决定了旋转的程度,可以是正数、负数或零。
四、旋转轴和旋转角的计算公式1. 绕坐标轴旋转的公式当物体绕坐标轴旋转时,可以使用以下公式进行计算:- 绕x轴旋转:x' = x, y' = y*cos(θ) - z*sin(θ), z' = y*sin(θ) + z*cos(θ)- 绕y轴旋转:x' = x*cos(θ) + z*sin(θ), y' = y, z' = -x*sin(θ) +z*cos(θ)- 绕z轴旋转:x' = x*cos(θ) - y*sin(θ), y' = x*sin(θ) + y*cos(θ), z' = z2. 绕任意轴旋转的公式当物体绕任意轴旋转时,可以使用四元数表示旋转,并通过以下公式进行计算:- 旋转后的位置:P' = Q * P * Q^-1- 其中,P为原始位置向量,P'为旋转后的位置向量,Q为旋转四元数,Q^-1为Q的逆四元数。
五、旋转轴和旋转角的应用旋转轴和旋转角的概念和计算公式在许多领域都有广泛的应用,以下列举几个例子:1. 三维计算机图形学中,旋转轴和旋转角用于描述物体的旋转变换,从而实现物体的旋转效果。
2. 机器人学中,旋转轴和旋转角用于描述机械臂的旋转关节,以实现机械臂的运动和灵活性。
九年级数学知识点旋转
九年级数学知识点旋转旋转是几何学中的一个重要概念,也是九年级数学中的一项重要知识点。
通过旋转,我们可以改变几何图形的位置和形状,进而解决一些与几何相关的问题。
本文将介绍九年级数学中的旋转知识点,包括旋转的定义、旋转的性质、旋转的公式以及旋转在几何问题中的应用。
一、旋转的定义旋转是指围绕一个中心点,将一个图形按照一定的角度转动的操作。
在旋转中,中心点是固定不动的,只有图形发生位置和形状的改变。
旋转可以使得图形在平面上发生移动,使得我们可以观察到图形在不同位置和不同角度下的特征。
二、旋转的性质1. 旋转可以改变图形的位置和形状,但不改变图形的面积和周长。
这是因为旋转只是对图形进行了转动操作,而没有改变图形内部的构造和尺寸。
2. 旋转不改变图形的对称性。
如果一个图形具有对称性,那么它的旋转图形也将具有相同的对称性。
3. 旋转操作可以通过多次重复进行。
如果我们将一个图形按照一定的角度旋转一次之后,再按照同样的角度再次进行旋转,那么我们将得到一个新的图形,这个新的图形是原图形旋转后的结果。
三、旋转的公式在几何中,我们可以使用一些公式来描述旋转的操作。
关于旋转的公式有以下几种:1. 计算旋转中心:给定一个图形和它在旋转后的位置,我们可以通过求解方程组来计算旋转中心。
假设原图形中某点坐标为(x, y),它在旋转后的位置为(x', y'),则有如下方程组:x' = x * cosθ - y * sinθy' = x * sinθ + y * cosθ其中,(x', y')为旋转后点的坐标,θ为旋转的角度。
2. 计算旋转后的坐标:将一个点绕旋转中心旋转一定的角度,可以使用如下公式计算旋转后的坐标:x' = (x - h) * cosθ - (y - k) * sinθ + hy' = (x - h) * sinθ + (y - k) * cosθ + k其中,(x, y)为原始点的坐标,(x', y')为旋转后点的坐标,(h, k)为旋转中心的坐标,θ为旋转的角度。
小专题(四):平面直角坐标系中图形旋转的变换规则
小专题(四):平面直角坐标系中图形旋转的变换规则1. 引言平面直角坐标系中,图形的旋转是一种常见的几何变换。
本文介绍了图形旋转的变换规则。
2. 图形旋转的基本概念图形旋转是指将一个图形绕一个中心点旋转一定角度后得到新的图形。
旋转的中心点可以位于坐标原点或任意其他点。
3. 旋转变换的规则根据旋转变换的规则,对于同一图形的旋转变换,可以得到以下规律:- 旋转360度(或2π弧度)等于恢复原状,即旋转后的图形与原图形完全相同。
- 旋转180度(或π弧度)等于将图形沿旋转中心点对称。
- 旋转90度(或π/2弧度)等于将图形逆时针旋转90度。
- 旋转270度(或3π/2弧度)等于将图形顺时针旋转90度。
4. 旋转的计算方法为了进行图形的旋转变换,可以利用旋转矩阵进行计算。
旋转矩阵是一个二维的矩阵,在平面直角坐标系中描述了图形的旋转变换。
旋转矩阵的公式如下:R = | cosθ -sinθ || sinθ cosθ |其中,θ表示旋转的角度。
5. 应用举例以矩形图形为例,假设原始矩形的坐标为A(x₁, y₁), B(x₂,y₁), C(x₂, y₂), D(x₁, y₂)。
若要将该矩形逆时针旋转90度得到新的矩形A'(x₁', y₁'), B'(x₂', y₁'), C'(x₂', y₂'), D'(x₁', y₂'),可以通过旋转矩阵计算得出新的坐标。
新的坐标计算公式如下:x₁' = x₁ * cos90 - y₁ * sin90y₁' = x₁ * sin90 + y₁ * cos90x₂' = x₂ * cos90 - y₁ * sin90y₂' = x₂ * sin90 + y₁ * cos906. 结论图形在平面直角坐标系中的旋转变换遵循一定的规则和计算方法。
通过理解和应用这些规则和计算方法,我们可以对图形进行准确的旋转变换。
欧拉角小角度近似
欧拉角小角度近似
欧拉角小角度近似是一种常用的数学方法,用于描述物体在三维空间中的旋转。
在实际应用中,欧拉角小角度近似可以帮助我们更加准确地计算物体的旋转角度和方向,从而实现更加精确的控制和操作。
欧拉角小角度近似的基本原理是将欧拉角分解为三个独立的旋转,分别绕着三个坐标轴进行。
在小角度近似下,这三个旋转可以看作是独立的,因此可以分别计算它们的旋转角度和方向,最终得到物体的总旋转角度和方向。
具体来说,欧拉角小角度近似可以通过以下公式进行计算:
R = Rz(γ)Ry(β)Rx(α)
其中,R表示物体的旋转矩阵,Rz(γ)、Ry(β)和Rx(α)分别表示绕着z轴、y轴和x轴旋转的矩阵,γ、β和α分别表示物体绕着z轴、y轴和x轴旋转的角度。
在小角度近似下,可以将旋转矩阵R近似为单位矩阵加上一个小量,即:
R ≈ I + ε
其中,ε表示一个小量,可以看作是物体的旋转角度和方向的微小变化。
将这个近似代入欧拉角公式中,可以得到:
R ≈ Rz(γ)Ry(β)Rx(α) ≈ I + εz(γ)I + εy(β)I + εx(α)I
其中,εz(γ)、εy(β)和εx(α)分别表示绕着z轴、y轴和x轴旋转的微小角度。
通过这个公式,我们可以计算出物体的旋转角度和方向,从而实现更加精确的控制和操作。
在实际应用中,欧拉角小角度近似被广泛应用于机器人控制、航空航天、计算机图形学等领域,为实现精确的旋转控制提供了重要的数学工具。
欧拉角小角度近似是一种非常实用的数学方法,可以帮助我们更加准确地计算物体的旋转角度和方向。
在实际应用中,我们可以根据具体情况选择不同的欧拉角分解方法,以实现更加精确的控制和操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
下列人物,在他們的生平事跡中,有甚麼共通之處?
原來他們在年青的時候,都曾經閱 讀過一本數學經典鉅著:《幾何原 本》。
「如果歐幾里得未能激 起你少年時代的熱情, 那麼你就不是一個天才 的科學家了。」 ~~愛因斯坦
Outline
• • • •
前言 緣起 研究一-如何換算馬達轉動與角度關係 研究二-如何從限制行程中推算旋轉中心
第9組(-29) 165.596,143.639 163.603,140.256 167.409,147.122
第8組(-59) 138.627,115.712 135.210,113.778 141.939,117.822
研究二-驗證2-計算座標
將九組資料帶入後傳回結果進行分析
Quadrant Ⅰ Y_Axis Ⅱ Ⅲ Ⅳ
– – – – – 使用到定理 計算圓半徑 計算圓心 驗證 結論
• 參考資料 • Q& A
前言一 • 歐幾里得約於前300年寫成《幾何原本》 • 《幾何原本》(希臘語:Στοιχεῖα)是古希臘數學家歐幾 里得所著的一部數學著作,共13卷。這本著作是現代數學 的基礎,在西方是僅次於《聖經》而流傳最廣的書籍。 畢達哥拉斯
式(4-2)
P1X RcX P 2 X RcX r r cos cos P1X P 2 X 2 2r P1X P 2 X sin sin 2r P1X P 2 X sin 2r sin P1X P 2 X arcsin 2r sin cos cos
A few Angle to Calculate Rotate Center RealRotateCenter Report By Ray 2012/12/5 Data Time Original_Data(Unit:mm) 100 180 RealRadius 75 Point_Base Point_Minus Point_Plus Cal_RotateCenter RotateCenterDiff θ Cal_θ radius radius_Diff θ_Diff X Y X Y X Y X Y X Y 166.825 214.049 168.515 210.505 164.951 217.5 27 99.997 180 26.999 75.002 -0.003 0 0.002 -0.001 131.696 247.973 135.21 246.221 128.095 249.538 65 100.006 179.998 65.005 74.998 0.006 -0.002 -0.002 0.005 100 255 103.925 254.897 96.074 254.897 90 100 179.994 90 75.006 0 -0.006 0.006 0 65.95 246.825 69.494 248.515 62.5 244.951 117 100 180.006 117.002 74.994 0 0.006 -0.006 0.002 35.048 217.5 37.099 220.847 33.174 214.049 150 99.993 180.001 149.999 74.994 -0.007 0.001 -0.006 -0.001 29.523 154.348 28.277 158.072 30.962 150.695 -160 102.685 128.767 160 75 2.685 -51.233 0 320 56.981 118.563 53.825 120.899 60.256 116.396 -125 106.433 57.292 125 75.004 6.433 -122.708 0.004 250 138.627 115.712 135.21 113.778 141.939 117.822 -59 106.721 51.602 58.995 75.003 6.721 -128.398 0.003 117.995 165.596 143.639 163.603 140.256 167.409 147.122 -29 103.806 107.377 29.001 74.999 3.806 -72.623 -0.001 58.001
以上兩方法均可求出Θ,將Θ帶入式1、2(或3、4)可得圓心座標
RcX P 2 X cos * r RcY P 2Y sin * r
RcX P1X cos * r RcY P1Y sin * r
研究二-驗證1產生數據
使用Visio 產生實際座 標檔共計9 組進行驗證
第1組(27) 166.825,214.049 168.515,210.505 164.951,217.5
(100,180)
第6組(-160) 29.523,154.348 28.277,158.072 30.962,150.695 第7組(-125) 56.981,118.563 53.825,120.899 60.256,116.396
P1 P0
P2 Φ
Φ
Θ
研究二-計算圓心2
式(1-3)
P 2Y RcY P1Y RcY sin sin r r sin sin P 2Y P1Y 2 2r P 2Y P1Y cos sin 2r P 2Y P1Y cos 2r sin P 2Y P1Y arc cos 2r sin
A
移動距離
已知:
範例: 馬達每轉分割D:10000 螺距R:10mm L=300mm 需要轉動角度A:5° 解: 每pulse:0.001mm 移動距離=tan(5)*L=26.247 B(pulse)=26.247/0.001 =26247pulse
研究二-如何從限制行程中推算旋轉中心
使用三點求圓方法?
任三點可以求圓公式
如任一座標有些微誤差時會造 成非常大的偏差
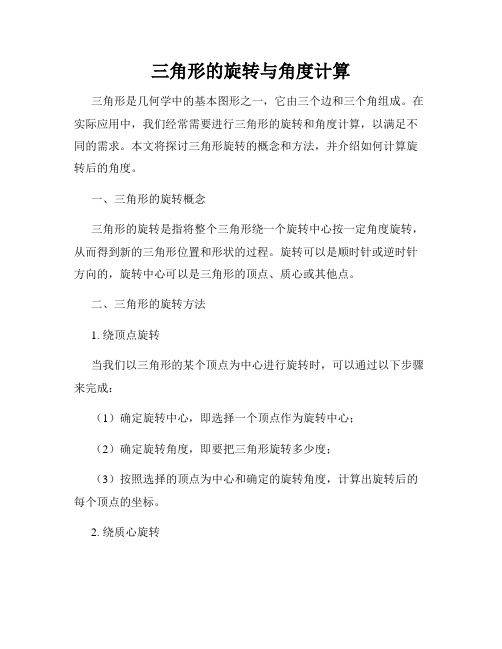
研究二-使用到定理
使用『正弦定理』與『積化和差』準確求出旋轉中心
研究二-計算圓半徑
首先求出圓半徑
P1
P0 P1 2
P0
已知: P0:Base P1:Minus P2:Plus Rc:Rotate Center Φ:Rotate Angle 求 r:radius
sin sin cos cos 2 sin sin cos sin 2
sin
P 2Y RcY 1 r P 2 X RcX cos 2 r P1Y RcY sin 3 r P1X RcX cos 4 r
緣起-CLSM專案
緣起-CLSM專案 • 研究一
– 如何換算馬達轉動與角度關係
• 研究二
– 如何從限制行程中推算旋轉中心
研究一-如何換算馬達轉動與角度關係
L
馬達每轉分割數 D(pulse) 螺桿螺距 R(mm) 圓心與螺桿軸心 L(mm) 求: 需求轉動角度A(Degree)換算成轉動B(pulse) 解: 每pulse移動距離:R/D 需要轉動角度A: tan(A)=移動距離/L 移動距離=tan(A)*L 需要馬達轉動B: B=tan(A)*L/(R/D)=tan(A)*L*D/R
塞瓦定理 梅涅勞斯定理 托勒密定理 海倫公式 九點圓 勾股定理
前言二
李奧納多· 達文西[1](義大利文:Leonardo da Vinci,1452年4月15日-1519年5月2日) 關於人體比例的作品──《維特魯威人》
建築師維特魯維Vitruvius[1]在 《論建築 De architectura》書中 指出 你若分開雙腳讓身高降低14分之1, 然後抬舉雙臂,中指指尖跟頭頂位 於同1水平高度,伸展的4肢前端 會恰好位於以肚臍為圓心的圓周上, 兩腳岔開的空間則構成1個等邊3 角形。而1個人平舉兩臂的寬度恰 好等於其身高。
第4組(117) 65.950,246.825 69.494,248.515 62.5,244.951 第5組(150) 35.048,217.5 37.099,220.847 33.174,214.049 第3組(90) 100,255 103.925,254.897 96.074,254.897 第2組(65) 131.696,247.973 135.210,246.221 128.095,249.538
*不適用第三、四象限,因Sin、Cos並沒有辦法分別出第三、四象限的結果
RotateCenterDiff radius_Diff θ_Diff X(mm) Y(mm) (mm) (Degree) -0.003 0 0.002 -0.001 0.006 -0.002 -0.002 0.005 0 -0.006 0.006 0 0 0.006 -0.006 0.002 -0.007 0.001 -0.006 -0.001
小角度計算旋轉中心
下列人物,在他們的生平事跡中,有甚麼共通之處?
阿基米德(Archimedes; B.C. 287212)
槓桿原理、浮力理論
林肯 (Lincoln; 1809 1865)
第16任總統
羅素(Russell; 1872 1970)
英國哲學家 獲得諾貝爾文學獎
清聖祖 康熙(1654 1722) 高斯(Gauss; 1777 1855)
在符合第一、二象限條件下,軟體驗證旋轉中心誤差在0.01mm以下
研究二-驗證3-比較兩種方法差異
測試如果量測點發生量測誤差時兩種方法造成的效益比較 OriginalData 誤差分析 Point_Minus 正弦+積化和差(誤差) 三點求圓(誤差) Y X_shift Y_shift X Y Radius X Y Radius 210.505 0 0 -0.003 0 0.002 0.184 0.095 -0.207 210.505 0.05 0 0.021 -0.456 0.21 -18.344 -9.966 20.87 210.505 0.1 0 0.045 -0.916 0.423 -50.669 -27.519 57.647 210.505 -0.05 0 -0.027 0.449 -0.201 12.19 6.615 -13.864 210.505 -0.1 0 -0.05 0.891 -0.399 20.598 11.181 -23.426 210.555 0 0.05 0.473 0.036 -0.428 -7.154 -3.889 8.14 210.605 0 0.1 0.95 0.071 -0.857 -16.719 -9.084 19.022 210.455 0 -0.05 -0.48 -0.038 0.434 5.991 3.249 -6.813 210.405 0 -0.1 -0.956 -0.077 0.866 10.697 5.804 -12.166 210.555 0.05 0.05 0.497 -0.422 -0.218 -31.21 -16.952 35.508 210.605 0.1 0.1 0.998 -0.856 -0.427 -123.09 -66.846 140.053 210.455 -0.05 -0.05 -0.503 0.408 0.233 16.019 8.694 -18.218 210.405 -0.1 -0.1 -1.002 0.804 0.475 25.556 13.873 -29.063Βιβλιοθήκη P2 Φ RcΦ/2