ARM7资料LPC2103练习1
菜鸟学arm之管脚连接模块与GPIO(基于arm7内核)
入 1 无效),只操作其中某一位或者某些位时,可以不必关心其他位
的状态,即不必读回原来的值再进行与或操作后回写,可以径直修改
需要的位而不必担心影响其他管脚的状态。一般情况下,有这种特性
的寄存器,均会有置位和清零寄存器成对出现,如 IOSET 和 IOCLR.
使用示例:
1.设置 P0.0 为输出模式
PINSEL0=0X00000000; //P0.0 选择 GPIO 功能
GPIO(General Purpose I/Oports)是通用输入输出口 的简称,是管脚最常用的功能,负责管理它的模块叫做 GPIO 模块。
本文会详细地讲述管脚连接模块的作用与用法,并着重 讲述管脚最常用的 GPIO 功能,最后会以一个实例进行分析 以使大家对其理解更加深刻。
管脚连接模块
管脚连接模块的寄存器一般写作 PINSELx,其中 x 可以是 0、1、 2 等等,不同系列的芯片写法可能有出入,但其道理都是一样的,都 是对管脚的功能进行选择。本文我就以恩智浦公司产的 LPC2103 芯 片为例进行讲解,你可以根据本文的方法对其他芯片进行操作。
这段话说的是什么意思呢,说的就是比如我想让已被选
为 GPIO 的 0 到 7 这 8 个管脚在某一时刻同时输出 0xaa,也
就是输出 10101010,而不管这 8 个管脚之前是什么值,假设
这 8 个管脚之前的值是 01010101,我如果用 IOSET 和 IOCLR
进行这个过程时,就要分 2 步进行,即先用 IOSET 把
IO0DIR=0X00000001;
//设置 P0.0 为输出模式
2.GPIO 读写操作
程序将会读取 P0.7~P0.4 脚值,然后从 P0.3~P0.0 输出
ARM7-LPC2131 GPIO寄存器
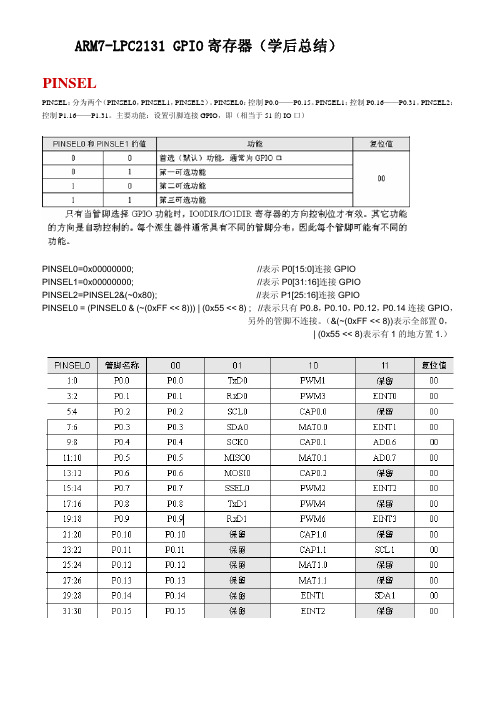
ARM7-LPC2131 GPIO寄存器(学后总结)PINSELPINSEL:分为两个(PINSEL0,PINSEL1,PINSEL2)。
PINSEL0:控制P0.0——P0.15。
PINSEL1:控制P0.16——P0.31。
PINSEL2:控制P1.16——P1.31。
主要功能:设置引脚连接GPIO,即(相当于51的IO口)PINSEL0=0x00000000; //表示P0[15:0]连接GPIOPINSEL1=0x00000000; //表示P0[31:16]连接GPIOPINSEL2=PINSEL2&(~0x80); //表示P1[25:16]连接GPIOPINSEL0 = (PINSEL0 & (~(0xFF << 8))) | (0x55 << 8) ; //表示只有P0.8,P0.10,P0.12,P0.14连接GPIO,另外的管脚不连接。
(&(~(0xFF << 8))表示全部置0,| (0x55 << 8)表示有1的地方置1.)IOPINIOPIN:分为两个(IO0PIN,IO1PIN)。
IO0PIN:控制P0.0——P0.31,IO1PIN:控制P1.16——P1.31。
主要功能:读出引脚的值,但只能是在GPIO配置时才有效。
但也有一种功能可以直接写入数据(I/O同时输出高低电平),PHILIPS不推荐使用。
即(直接赋值给I/O口)。
PINSEL0=0x00000000; //把P0口作为GPIO口。
IO0DIR=0x000000FF; //把P0.0-P0.7都作为输出口,另外的都为输入口。
(0表示输入,1表示输出)。
IO0SET=0x000000F0; //把P0.4-P0.7都变为高电平 。
back=IO0PIN; //把P0口的所有输出位的数据读出,并送给back;IO0CLR=0x0000000F; //把P0.0-P0.3都变为低电平(即清零)。
05 第五讲 24C02读写实验--手把手教你学ARM之LPC2103入门篇-15页精选文档

属性 读/写
只读 读/写 读/写 读/写 读/写
复位值 0x00
0XF8 0x00 0x00 0x04 0x04
I2C0的地址 I2C1的地址和
和名称
名称
0xE001 C000
I2C0CONSE T
0xE005 C000 I2C1CONSET
0xE001 C004
I2C0STAT
0xE005 C004 I2C1STAT
手把手教你学ARM
——之LPC210x入门篇
主 讲: 何 呈 策 划:张 勇 学习板:LT-ARM210X
力天电子版权所有 LT430 2009年 1月
第五讲 24C02读写实验
要点:
IIC总线 LPC210X的IIC总线使用
主讲:何 呈
版权:力天电子
LT430
典型的IIC总线的连接框图
0xE001 C008
I2C0DAT
0xE005 C008 I2C1DAT
0xE001 CADR
0xE001
0xE005 C010
C010 I2C1SCLH
I2C0版SC权LH:力天电子
0xEL00T1430 0xE005 C014
IIC数据波特率的计算:
主讲:何 呈
版权:力天电子
LT430
LPC210X与24C02的硬件连接
主讲:何 呈
版权:力天电子
LT430
LPC210X读写24CO2程序编写
打开IAR开发环境 ……
主讲:何 呈
版权:力天电子
LT430
下一讲课程安排
第六讲、ARM定时器及外部中断程序设计
主讲:何 呈
版权:力天电子
主讲:何 呈
基于LPC2103ARM7的温度测量系统(DOC)
本科毕业设计(论文)题目基于LPC2103 ARM7的温度测量系统电气与自动化工程学院电气工程及其自动化专业学号 B06071007 学生姓名指导教师起讫日期 2010年3月-2010年6月设计地点实验楼L403摘要随着信息化、智能化、网络化的发展,嵌入式系统技术广泛应用于工业控制、信息家电、交通管理、农业、商业、服务业等各行业,己成为现代电子产品设计的一大领域和方向。
因此,研究嵌入式系统有着相当重要的理论和实际意义。
嵌入式系统是以计算机技术为基础,以应用为中心,软件硬件可裁剪,适合于应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。
本文基于ARM核心微控制器LPC2103的硬件环境,集成搭建了一套具有实时操作系统的嵌入式平台,对嵌入式系统的硬件和软件及相关方面进行研究。
通过分析具有一定实时性的、源代码公开的嵌入式操作系统uC/OS-II,在初步了解其内核原理,如任务管理、时钟管理、任务间通讯等基础上,在基于LPC2103处理器的目标板上,对操作系统uC/OS-II进行配置,将此实时嵌入式操作系统成功地移植到目标板上,并用于实时温度测量及报警系统中。
该系统采用温度传感器PT100,并对系统的温度进行测量,通过液晶显示屏对温度信息进行显示。
同时,通过按键可以设定报警温度值,系统对温度进行实时监测,超过警示值,由LED灯进行报警。
【关键词】嵌入式系统;LPC2103;uC/OS-II;温度传感器PT100;温度测量与报警I基于LPC2103 ARM7的温度测量系统AbstractWith the development of information, intelligence and network, the technology of embedded system is widely applied to industrial control, information appliance, traffic control, agriculture, commerce, service industry, etc., and it has become a direction of design of modern electrical products. Therefore, making research on embedded system has very important meaning both in theory and practice. The embedded system is a professional computer system which is based on computer technique and application-centered, with cutting software and hardware, applies to application system, and meanwhile has strict requirement for function, reliability, cost diminution and power consumption. Based on the environment of the ARM core microcontroller LPC2103, this design builds an embedded platform of real-time operating system, and makes research on the hardware and software of embedded system and related aspects. This design analyzes the embedded system which is real-time, with open source code. With a preliminary understanding of core structure, such as task management, time management, task communication and so on, based on the target board of LPC2103 processor, we can allocate the operating system uC/OS-II and put the real-time embedded system into target board successfully, and meanwhile apply this system to real-time temperature mean sure and alarm system. This system adopts temperature sensor PT100, using PT100 to measure temperature of the system, and shows the temperature by liquid crystal display. Moreover, the system can be set temperature alarm value for real-time monitoring. The LED light will alarm as it is over warning value.KEYWORDS:embedded system;LPC2103;uC/OS-II;temperature sensor PT100;temperature measure and alarm.II目录摘要 (I)Abstract (II)第一章前言 (1)§1.1课题背景和意义 (1)§1.2国内同行研究概况 (1)§1.3研究的主要内容 (2)第二章 ARM处理器及嵌入式系统综述 (4)§2.1 ARM处理器 (4)§2.1.1处理器的简介 (4)§2.1.2 ARM处理器的体系结构 (4)§2.1.3 ARM编程模型 (5)§2.2 嵌入式系统 (6)§2.2.1嵌入式系统的定义 (6)§2.2.2嵌入式系统的特征 (6)§2.2.3嵌入式系统的应用 (6)§2.2.4嵌入式系统的发展趋势 (7)§2.3 本章小结 (7)第三章基于LPC2103的软硬件平台 (8)§3.1 LPC2103概述 (8)§3.1.1 LPC2103内核 (8)§3.1.2LPC2103的系统控制模块 (8)§3.2 LPC2103最小系统 (9)§3.2.1基于LPC2103的硬件平台实物图 (9)§3.3 温度传感器PT100 (10)§3.3.1 温度传感器的介绍及选择 (10)§3.3.2 PT100温度传感器工作原理 (10)§3.4 液晶显示屏S0-12864 (11)§3.5 集成开发环境及仿真软件 (11)§3.5.1 集成开发环境IAR (11)§3.5.2 H-JTAG功能介绍 (17)§3.6 本章小结 (21)第四章 uC/OS-Ⅱ移植 (22)§4.1 uC/OS-Ⅱ概述 (22)§4.1.1 任务管理 (22)§4.1.2 时间管理 (23)§4.2 uC/OS-Ⅱ在系统上的移植 (23)§4.3 uC/OS-Ⅱ移植的测试 (23)§4.4 本章小结 (25)第五章系统软硬件的设计调试 (26)§5.1 各功能模块设计系统 (26)§5.1.1 液晶屏12864的调试 (26)§5.1.2 按键输入功能嵌入 (30)§5.1.3 温度报警功能嵌入 (34)§5.2 uC/OS-Ⅱ系统中应用程序的加载及其优点 (35)III基于LPC2103 ARM7的温度测量系统§5.3 本章小结 (35)总结与展望 (36)本文小结 (36)前景展望 (36)谢辞 (37)参考文献 (38)IV第一章前言§1.1课题背景和意义随着信息化、智能化、网络化的发展,嵌入式系统技术广泛应用于工业控制、信息家电、交通管理、农业、商业、服务业等各行业,己成为现代电子产品设计的一大领域和方向。
菜鸟学arm之arm7整体框架学习(基于arm7内核)
ARM7整体框架学习——基于LPC2103(arm7内核)的讲解注:该内容适用于大部分arm7内核的芯片By:小飞胡一般我们学一样东西,都希望对它有个整体的了解,这样心里就比较清楚这个东西有什么、我要学什么,学arm也一样,我们首先要了解下arm的整体框架结构,了解它的资源外设及编程框图,这样才能更好地把握。
本文我将详细的讲解一下arm7的一般结构、硬件外设、功能模块及其作用以及一些入门常识,使你对arm7能有个全面的了解,更好的掌握。
先放个图,这是arm7内核的LPC2103的封装图和方框图正上方是arm内核,左上方是存储部分和高速IO,右上方是系统功能模块和中断控制器,图的下方全是外设。
我们学习时,要学会并能熟练操控各个功能模块,这是最基本的要求,只有这样才能灵活运用各个功能部件以解决实际问题,才能往高层次的处理器应用上靠。
下图是LPC2103的存储器映射,也就是不同存储器对应的逻辑地址。
上边这种类型的地址映射结构属于冯诺依曼结构,也就是统一编址方式,地址和数据不加任何区分地放在存储器中。
还有一种结构叫做哈佛结构,它的数据和程序是分开放的,我们熟悉的51系列单片机就是这种结构。
在arm处理器中,内存单元的大小有3种:字节(8位),半字(16位),字(32位),这个和传统的处理器的概念有所不同。
下边介绍一个概念,大端存储和小端存储:小端和大端是字节寻址存储器字存储的两种方式,根据最低有效字节与相邻较高有效字节相比是存储在较低地址还是较高地址来划分。
小端方式为较低字节存放在较低地址,如图a所示;大端方式则是较低字节存放在较高地址,如图b所示。
因为不同的arm芯片在编程时的存储方式有可能不同,所以使用编程软件时要对大小端进行配置。
以IAR编程软件为例,大小端的设置如图所示:最下边有个选项“Endian mode”,这个就是选择大小端的,下边就是little(小端)和Big(大端),大小端的选择要根据芯片的类型来确定,一般来说选择小端的多些。
ARM7学习---LPC2103 Time0定时器练习
ARM7 学习---LPC2103 Time0 定时器练习继续学习ARM7,练习了下LPC2103 的内部定时器T0,定时1S,让LED闪烁。
具体测试程序如下:/**************ARM7(LPC2103)练习程序**************************//*************************************************************//*****File Function : Time0 测试程序*****//*****Program Author : ZhengWen(ClimberWin) *****//*****MCU :LPC2103F 外部11.0592M 晶振*****//*****Compile Date : 2010/02/13*****//*****Edition Info : V1.0*****//*************************************************************///编译环境KEIL for ARM//LED1-LED7 接在P0.8-P0.15//功能:使用内部定时器0,让LED 闪烁。
#include #define uchar unsigned char#define uint unsigned intvoid Timer0_Init(void);void __irq IRQ_Timer0 (void);/*************定时器0 中断程序****************/void __irq IRQ_Timer0(void){ static uchar ledtemp=0x00;ledtemp=~ledtemp;if(ledtemp==0x00) IO0SET=(1T0PR = 99; // 设置定时器0 分频为100 分频,得110592HzT0MCR = 0x03; // 匹配通道0 匹配中断并复位T0TCT0MR0 = 110592;// 比较值(1S 定时一次)T0TCR = 0x01; //定时器计数器和预分频计数器使能VICIntSelect = 0x00;//所有中断通道设置为IRQ 中断VICVectCntl0 = 0x20|4 ;// 向量IRQ slot 使能|中断号VICVectAddr0 = (unsigned long)IRQ_Timer0;// 设置中断服务程序地址VICIntEnable = (1 int main(void){ IO0DIR=0x0000ff00; //配置P0.8-P0.15 为输出IO0SET=0x0000ff00; //配置P0.8-P0.15 初始值为高Timer0_Init(); //初始化定时。
LPC2103学习之GPIO
LPC2103学习之GPIO
LPC2103 关于引脚的寄存器有两个PINSEL0 与PINSEL1,都是32 位宽度。
PINSEL0 与PINSEL1 寄存器的每两位控制一个引脚的功能,则一个脚最多
有4 种功能。
其中PINSEL0 控制着P0.0 到P0.15 的引脚。
PINSEL1 控制着
P0.16 到P0.31 的引脚。
PINSEL 寄存器的设置只需两个步骤。
一找到要设置的引脚。
二是选择引脚
的功能。
如图所示:
下面举例说明
1.设置P0.0 为GPIO 功能
PINSEL0 = 0x00 /*设置P0.0 到P0.15 都为GPIO*/
2.设置P0.0 为TxD0 功能
PINSEL0 = (PINSEL0 & 0xFFFFFFFC) | 0x01; /*设置P0.0 的功能为TxD0*/
当然如果为了不改变原来引脚的功能。
你应该采取读取修改回写的方式进行。
即先读取寄存器值,然后进行一些逻辑的与、或等操作,最后把修改值再写回
寄存器。
比如:
PINSEL0 = (PINSEL0 & 0xFFF0FFFF) | (0x05 关于LPC2103 的GPIO
LPC2103 只有一个32 位的通用IO 口。
由于引脚的功能复用,使用前必须进
行相关引脚设置,再进行操作。
比如P0.27 到P0.31 就是JTAG 调试引脚。
LPC2103 的GPIO 模式有低速与高速模式。
ARM7实验指导(a)1资料
ARM7实验指导书(LPC2103)(A)电气与信息学院实验室2009-11-11目录前言 1 SKD ARM7实验板简介 (1)SKD ARM7(LPC2103)实验软件界面 (2)1ARM7(LPC2103)硬件实验 (3)1.1流水灯实验 (3)1.2蜂鸣器、继电器 (4)1.3输入输出实验 (5)1.4定时器实验 (6)1.5外部中断实验 (8)1.6数码显示器实验 (11)1.7D/A转换扩展验 (12)1.8A/D转换实验 (14)1.9I2C实验 (37)1.10实时时钟实验 (40)1.11看门狗实验 (44)1.12综合实验(A/D + D/A + GPIO + 时间 + 日期 + 液晶(或数码))实验1.数码管循环显示实验一、实验目的了解数码管动态显示原理,学会LPC2103通用I/O口的使用。
二、实验及说明本实验中共接入了8个共阳八段数码管(数码管阳极连在一起),演示数码管中的某一段点亮只需在对应的位置写入“0”即可。
在这里74HC595实现了数据串并转换的功能,试验中用到的两片74HC595分别用于控制八个数码管的位选和其中每个数码管的段选。
本实验循环显示了十六进制数码“0—F”。
三、实验说明四、实验步骤4.1 实验连线段选控制芯片(U7:74HC595)时钟控制端接LPC2103总线接口模块的P0.4,数据输入端接总线接口模块的P0.6,选通端接跳线JP9。
数据输出端分别接数码管段选端。
位选控制芯片(U8:74HC595)时钟控制端接LPC2103总线接口模块的P0.4,数据端接总线接口模块的P0.7,选通端接跳线JP10。
数据输出端分别接数码管位选端。
JP9:左跳数码管段选芯片(U7)片选有效,右跳液晶显示EN有效。
JP10:左跳数码管位选芯片(U8)片选有效,右跳液晶显示CS2有效。
JP14:左跳数码管段选、位选电源端(+3.3V)有效。
JP15:左跳数码管段选、位选芯片接地端(GND)有效。
嵌入式LPC2103教程基于ARM的嵌入式程序设计
constb FIELD 4
x
FIELD 4
y
FIELD 4
string FIELD 16
使用:
LDR R5, constb;LDR R5,[PC,offset]
特殊内存表:
FIELD操作数为0,标号表明当前内存单元地址。
start EQU 0x1000
end EQU 0x2000
MAP start
➢有三种形式:基于绝对地址的、基于相对地 址的和基于PC的内存表。
1.基于绝对地址的内存表
MAP 8192
consta FIELD 4
constb FIELD 4
x
FIELD 4
y
FIELD 4
string FIELD 16
使用:LDR R0, constb;
2.基于相对地址的内存表
MAP 0,R9
FIELD {label}FIELD expr 定义一个结构化内存表中的数据域。
SPACE {label} SPACE expr 分配一块连续内存单元,并用0初始化。
DCB
{label}DCBexpr{ , expr} 分配一段字节内存单元,并用expr初始化。
DCD/ DCDU DCDO
DCFD/ DCFDU DCFS/ DCFSU DCI
consta FIELD 4
constb FIELD 4
x
FIELD 4
y
FIELD 4
string FIELD 16
endalert FIELD 0
ASSERT endalert<=end
end;第2遍扫描时,条件不成立,报告错误
4) SPACE
➢ {label} SPACE expr
01第一讲ARM系统简介--手把手教你学ARM之LPC2103入门篇-PPT课件

图片说明:整个系统
图片说明:控制和采集系统
主讲:何 呈
版权:力天电子
LT430
2019英特尔杯大学生电子设计竞赛 嵌入式系统专题邀请赛作品:
《基于嵌入之星平台的“探路者2号”水下机器人系统》
பைடு நூலகம்
图片说明: 与队友合作 调试
图片说明:水 下试航
主讲:何 呈
版权:力天电子
LT430
使用ARM开发过的一些项目
图片说明: 44B0基础 开发板
主讲:何 呈
版权:力天电子
LT430
使用ARM开发过的一些项目
嵌入式Webcam远端监控 系统 图片说明:硬件平台 图片说明:实现的监控效果
主讲:何 呈
版权:力天电子
LT430
2019英特尔杯大学生电子设计竞赛 嵌入式系统专题邀请赛作品:
版权:力天电子
主讲:何 呈
LT430
ARM体系结构的特点
ARM采用RISC结构,在简化处理器结构,减少复杂 功能指令的同时,提高了处理器的速度。 考虑到处理器与存储器打交道的指令执行时间远 远大于在寄存器内操作的指令执行时间,RISC型处 理器采用了Load/Store(加载/存储)结构,即只有 Load/Store指令可与存储器打交道,其余指令都不 允许进行存储器操作。 同时,为了进一步提高指令和数据的存取速度, RISC型处理器增加了指令高速缓冲I-Cache和数据高 速缓冲D-Cache及多处理器结构,使指令的操作尽 可能在寄存器之间进行。
主讲:何 呈
版权:力天电子
LT430
2019年五四杯三等奖作品:
通用遥控LED数码显示系统 图片说明:硬件实物 图片说明: 上位机软件 界面
GPIO基本操作之——ARM7:NXP_LPC2103
GPIO基本操作之——ARM7:NXP_LPC2103注:本文的所有操作都是基于NXP公司的ARM7TDMI-S系列芯片LPC2103,关于寄存器的定义请见我上传的附件的“LPC2103.h”头文件一、相关主要寄存器1,PINSEL0和PINSEL1(引脚功能选择寄存器)可读写一个引脚大多数情况都是复用的,可以通过这个寄存器来设置相应引脚做的功能。
默认初始值为“0”,即做为GPIO口使用,因此作为I/O口使用时大多数情况不用设置此寄存器;2,IOPIN(I/O引脚状态值寄存器)可读写保存引脚当前状态值的寄存器,无论引脚的方向如何设置,引脚的状态都是可以从这个寄存器读出的;3,IODIR(I/O引脚方向控制寄存器)可读写该寄存器用于控制每个I/O脚的方向(输入/输出);相应位写“0”则为输入,写“1”则为输出4,IOSET(I/O引脚输出设置寄存器)可读写该寄存器和IOCLR一起控制引脚的输出状态。
给其写“1”,就输出一个高电平,写“0”则无效。
该引脚若被设置为输入,则对其进行写操作无效;5,IOCLR(I/O引脚输出清零寄存器)该寄存器控制引脚的输出状态。
给其写“1”就输出一个低电平,同时清零IOSE T的相应位,写“0”则无效。
该引脚若被设置为输入,则对其进行写操作无效;二、操作示例在这里我以操作GPIO口P0.22为例:(注:关于寄存器的的赋值操作请见我C编程分类下寄存器操作一文)1,设置为输出使用,并读写P0.22/* 前面我说过PINSEL1寄存器的默认初始设置为做GPIO,但是有时会对一个引脚的几个功能切换使用,故我习惯对一个引脚做I/O使用时先对其相应位清零操作 */PINSEL1 &= ~(3 << 7);/* 设置I/O口的方向,输出 */IODIR |= (1 << 22);/* 读P0.22状态值*/temp = IOPIN;/* 让P0.22输出“1”(高电平) */IOSET |= (1 << 22);/* 让P0.22输出“0” (低电平)*/IOCLR |= (1 << 22);/* 让P0.22输出上升沿 */IOCLR |= (1 << 22);IOSET |= (1 << 22);/* 让P0.22输出下降沿 */IOSET |= (1 << 22);IOCLR |= (1 << 22);2,设置为输入使用,并读写P0.22(注:LPC2103的引脚做I/O使用时由于其本身不带内部上拉功能,故在作为输入使用时,其状态只能通过接收外部输入来改变)/* 功能选择 */PINSEL1 &= ~(3 << 7);/* 设置I/O口的方向,输入 */IODIR |= (1 << 22);/* 读P0.22状态值 */temp = IOPIN;。
01第一讲ARM系统简介--手把手教你学ARM之LPC2103入门篇知识课件
ARM 体系结构的演变
一、Thumb指令集(T变种) 支持Thumb指令的ARM体系版本,一般加字符T来表示,如
ARM7TDMI中的’T’。 二、长乘指令(M变种)
M变种(如ARM7TDMI中的‘M’)增加了两条这样的长 乘指令:
1、其中一条指令完成32位整数乘以32位整数,生成64位整 数的长乘操作;
完美结合的产物。 五、ARM媒体功能扩展(SIMD变种)
ARM的SIMD媒体功能扩展为这些应用系统提供了解 决方案。它为包括音频/视频处理在内的应用系统提供 了优化功能。
ARM体系结构的特点
总体思想:在不牺牲性能的同时,尽量简化处 理器。同时从体系结构的层面上灵活支持处理 器扩展。这种简化和开放的思路使得ARM处 理器采用了很简单的结构来实现。
ARM处理器是最先进的:目前,ARM32位体 系结构被公认为业界领先的32位嵌入式RISC 微处理器核,所有ARM处理器都共享这一体 系结构。
图片说明:水 下试航
课程安排
第一讲:ARM系统简介 第二讲:ARM开发工具及配置 第三讲:LPC210X的PLL设置及GPIO操作 第四讲:流水灯、蜂鸣器、数码管的程序设计 第五讲:24C02读写及IIC双机通信程序设计 第六讲:ARM定时器及外部中断程序设计 第七讲:USART及标准输入输出接口程序设计 第八讲:按键和PS2键盘解码程序设计 第九讲:12864液晶程序设计及简单的GUI建立 第十讲:SD卡操作及FAT文件系统程序设计
决方案供应商。
ARM处理器简介
• ARM公司是知识产权(IP)公司,本身不生产芯片,靠 转
让设计许可,由合作伙伴公司来生产各具特色的芯片。 目前,全世界有几十家著名的半导体公司都使用ARM公 司 的授权,其中包括MOTOROLA、IBM、Intel、LG、 SONY、 NEC、ATMEL等,从而保证了大量的开发工具和丰富的 第 三方资源,它们共同保证了基于ARM处理器核的设计可 以 很快投入市场。 ARM公司已成为移动通信、手持设备、 多媒体数字消费嵌入式解决方案的RISC标准。
ARM7学习---按键测试程序(LPC2103 IO0PIN)
ARM7 学习---按键测试程序(LPC2103 IO0PIN)今天一直在学习按键测试程序,看上去很简单,按键嘛谁都会用,很多种单片机里都是用过了,但是今天还是遇到了一个问题,而且花了我半天的时间调试和找问题。
刚开始我不会用LPC2103 的GPIO,后来查了数据手册,知道了读取IO 口的方法是读取IOPIN 寄存器,LPC2103 使用的是IO0PIN。
我程序写好,把按键通过串口反馈信息。
但是我一直测试没按键的时候输入按键口状态不稳定,有按键的时候还是很稳定的。
我以为程序出错了,一直在修改程序,但是还是一样的情况。
后来静下心来想了下,是否IO 配置错了?但是检查了好多遍,IO 是配置为输入,没什么问题的。
后来终于想起来了,我没在按键的IO 口加上拉电阻,以前我在51 STC AVR 单片机的按键口都不加上拉电阻的,因为IO 内部有上拉可以配置的,结果我看了下LPC2103,没找到。
所以我外部加了个10K 的上拉电阻,这回再测试,OK 了,哈哈!真高兴!一下是示例程序:我从我整个程序了挑出了按键部分程序,串口通信程序没添加上去。
//#include //#include#define K1 (1void keytest(void);void keytest(void) //按键测试程序{if((IO0PIN&K1)==0x00) //判断是否有按键按下{ //按键去抖while((IO0PIN&K1)==0x00) //判断是否有按键放开{ delayms(100); } UART0_SendStr(“K1”); } else {;}}////////////主程序///////////////int mian(){PINSEL0 |= 0x00000005; //设置I/O 连接到UART0,其他为普通GPIO 口PINSEL1 |= 0x00000000;UART0_INT(); //串口初始化。
一、LPC2103实现流水灯
)仿真LPC2103)(LPC2103ARM7(基于Proteus的ARM7一、LPC2103实现流水灯(鹰击长空,longsky2007@)★注:网上资料,仅供学习和参考★:1、仿真环境仿真环境:Proteus Pro7.4sp3IAR Embedded Workbench for ARM Evaluation 4.42A2、电路原理图接11.0592M晶振外接RC复位电路3、程序参照力天电子《LT-ARM210X+用户手册》4、注意事项安装IAR,见图1选择芯片和生成调试文件,见图2在Proteus中绘制原理图后调入调试文件,见图3、图4Proteus7.7SP2中可以仿真的ARM7芯片,见图5图1选择安装IAR for ARM4.42a图2-1选择芯片LPC2103图2-2选择生成Hex文件图2-3选择生成调试文件".elf"图2-4选择软件仿真图3原理图图4调入.hex或.elf文件图5Proteus7.7SP2中可以仿真的ARM7芯片图6仿真结果:延时1.2s/***************************************************************************** *文件名:LEDCON.C*功能:LED闪烁控制。
对发光二极管LED2进行控制,采用软件延时方法。
*使用I/O口直接控制LED,采用拉电流方式。
*说明:将跳线器S4_LED2短接。
****************************************************************************/ #include"..\inc\config.h"/**************************************************************************** *名称:Delay()*功能:长软件延时*入口参数:dly延时参数,值越大,延时越久*出口参数:无****************************************************************************/ void Delay(U32dly){U16i;for(;dly>0;dly--)for(i=0;i<600;i++);}void Delay_ms(U32time)//1毫秒延时{U32i;for(;time>0;time--)for(i=8929;i>0;i--);}void Delay_us(U32time)//1微秒延时{U32i;for(;time>0;time--)for(i=5;i>0;i--);}/*************************PLL设置************************************************/ void PLL_Init(void){/*设置系统各部分时钟*/PLLCON=1;#if((Fcclk/4)/Fpclk)==1VPBDIV=0;#endif#if((Fcclk/4)/Fpclk)==2VPBDIV=2;#endif#if((Fcclk/4)/Fpclk)==4VPBDIV=1;#endif#if(Fcco/Fcclk)==2PLLCFG=((Fcclk/Fosc)-1)|(0<<5);#endif#if(Fcco/Fcclk)==4PLLCFG=((Fcclk/Fosc)-1)|(1<<5);#endif#if(Fcco/Fcclk)==8PLLCFG=((Fcclk/Fosc)-1)|(2<<5);#endif#if(Fcco/Fcclk)==16PLLCFG=((Fcclk/Fosc)-1)|(3<<5);#endifPLLFEED=0xaa;PLLFEED=0x55;while((PLLSTAT&(1<<10))==0);PLLCON=3;PLLFEED=0xaa;PLLFEED=0x55;}/**************************************************************************** *名称:main()*功能:控制LED闪烁****************************************************************************/ void main(void){PINSEL0=0x00000000;//设置所有管脚连接GPIOPINSEL1=0x00000000;IO0DIR=LED2CON;//设置LED2控制口为输出PLL_Init();while(1){IO0SET=LED2CON;//LED2端口高电平Delay_ms(300);//延时3sIO0CLR=LED2CON;//LED2端口低电平Delay_ms(300);//延时3s}}/******************************************************************************************************** **文件名:config.h**------------------------------------------------------------------------------------------------------********************************************************************************************************/#ifndef TRUE#define TRUE1#endif#ifndef FALSE#define FALSE0#endiftypedef unsigned char U8;/*无符号8位整型变量*/ typedef signed char S8;/*有符号8位整型变量*/ typedef unsigned short U16;/*无符号16位整型变量*/ typedef signed short S16;/*有符号16位整型变量*/ typedef unsigned int U32;/*无符号32位整型变量*/ typedef signed int S32;/*有符号32位整型变量*/ typedef float fp32;/*单精度浮点数(32位长度)*/ typedef double fp64;/*双精度浮点数(64位长度)*//********************************//*ARM的特殊代码*//********************************/#include"LPC2103.h"/********************************//*应用程序配置*//********************************//********************************//*本例子的配置*//********************************//*系统设置,Fosc、Fcclk、Fcco、Fpclk必须定义*/#define Fosc11059200//晶振频率,10MHz~25MHz,应当与实际一至#define Fcclk(Fosc*4)//系统频率,必须为Fosc的整数倍(1~32),且<=60MHZ#define Fcco(Fcclk*4)//CCO频率,必须为Fcclk的2、4、8、16倍,范围为156MHz~320MHz #define Fpclk(Fcclk/4)*4//VPB时钟频率,只能为(Fcclk/4)的1~4倍#include"target.h"//这一句不能删除/************************************************LED Define*************************************************/#define LED3CON(0x1<<17)/*P0.17*/#define LED2CON(0x1<<18)/*P0.18*/#define LED1CON(0x1<<19)/*P0.19*/#define LED_MASK LED1CON|LED2CON|LED3CON/************************************************BUZZER Define*************************************************/#define BEEP0x1<<21/*P0.21*//************************************************PWMDAC Define*************************************************/#define PWM0x1<<20/*P0.20*//************************************************KEY Define*************************************************/#define KEY10x1<<16/*P0.16*/#define KEY20x1<<15/*P0.15*/#define ISP0x1<<14/*P0.14*//************************************************IIC EEPROM Define*************************************************/#define SCL0x1<<2/*P0.2*/#define SDA0x1<<3/*P0.3*//************************************************Msster Clock*************************************************/#define MCK11059200/************************************************ADC Define*************************************************/#define ADC00x01<<22/*P0.22*/ #define ADC10x01<<23/*P0.23*//************************************************LCD Define*************************************************/#define DB40x01<<4#define DB50x01<<5#define DB60x01<<6#define DB70x01<<7#define DBS0xf<<4//数据位移#define RS0x01<<26#define RW0x01<<25//R/W#define EN0x01<<24//DE#define LCDBL0x01<<19/************************************************SPI Define*************************************************/#define SCLK0x01<<4#define MISO0x01<<5#define MOSI0x01<<6#define RCK0x01<<7/******************************************************************************************************** **文件名:LPC2103.H**------------------------------------------------------------------------------------------------------********************************************************************************************************/ /*External Interrupts*//*外部中断控制寄存器*/#define EXTINT(*((volatile unsigned char*)0xE01FC140))#define EXTWAKE(*((volatile unsigned short*)0xE01FC144))#define EXTMODE(*((volatile unsigned char*)0xE01FC148))#define EXTPOLAR(*((volatile unsigned char*)0xE01FC14C))/*SMemory mapping control.*//*内存remap控制寄存器*/#define MEMMAP(*((volatile unsigned char*)0xE01FC040))/*Phase Locked Loop(PLL)*//*PLL控制寄存器*/#define PLLCON(*((volatile unsigned char*)0xE01FC080))#define PLLCFG(*((volatile unsigned char*)0xE01FC084)) #define PLLSTAT(*((volatile unsigned short*)0xE01FC088)) #define PLLFEED(*((volatile unsigned char*)0xE01FC08C))/*Power Control*//*功率控制寄存器*/#define PCON(*((volatile unsigned char*)0xE01FC0C0)) #define PCONP(*((volatile unsigned long*)0xE01FC0C4))/*VPB Divider*//*VLSI外设总线(VPB)分频寄存器*/#define VPBDIV(*((volatile unsigned char*)0xE01FC100))/*Memory Accelerator Module(MAM)*//*存储器加速模块*/#define MAMCR(*((volatile unsigned char*)0xE01FC000)) #define MAMTIM(*((volatile unsigned char*)0xE01FC004))/*Vectored Interrupt Controller(VIC)*//*向量中断控制器(VIC)的特殊寄存器*/#define VICIRQStatus(*((volatile unsigned long*)0xFFFFF000))#define VICFIQStatus(*((volatile unsigned long*)0xFFFFF004))#define VICRawIntr(*((volatile unsigned long*)0xFFFFF008))#define VICIntSelect(*((volatile unsigned long*)0xFFFFF00C))#define VICIntEnable(*((volatile unsigned long*)0xFFFFF010))#define VICIntEnClr(*((volatile unsigned long*)0xFFFFF014))#define VICSoftInt(*((volatile unsigned long*)0xFFFFF018)) #define VICSoftIntClear(*((volatile unsigned long*)0xFFFFF01C)) #define VICProtection(*((volatile unsigned long*)0xFFFFF020)) #define VICVectAddr(*((volatile unsigned long*)0xFFFFF030)) #define VICDefVectAddr(*((volatile unsigned long*)0xFFFFF034)) #define VICVectAddr0(*((volatile unsigned long*)0xFFFFF100)) #define VICVectAddr1(*((volatile unsigned long*)0xFFFFF104)) #define VICVectAddr2(*((volatile unsigned long*)0xFFFFF108)) #define VICVectAddr3(*((volatile unsigned long*)0xFFFFF10C)) #define VICVectAddr4(*((volatile unsigned long*)0xFFFFF110)) #define VICVectAddr5(*((volatile unsigned long*)0xFFFFF114)) #define VICVectAddr6(*((volatile unsigned long*)0xFFFFF118)) #define VICVectAddr7(*((volatile unsigned long*)0xFFFFF11C)) #define VICVectAddr8(*((volatile unsigned long*)0xFFFFF120)) #define VICVectAddr9(*((volatile unsigned long*)0xFFFFF124)) #define VICVectAddr10(*((volatile unsigned long*)0xFFFFF128)) #define VICVectAddr11(*((volatile unsigned long*)0xFFFFF12C)) #define VICVectAddr12(*((volatile unsigned long*)0xFFFFF130)) #define VICVectAddr13(*((volatile unsigned long*)0xFFFFF134)) #define VICVectAddr14(*((volatile unsigned long*)0xFFFFF138)) #define VICVectAddr15(*((volatile unsigned long*)0xFFFFF13C)) #define VICVectCntl0(*((volatile unsigned long*)0xFFFFF200)) #define VICVectCntl1(*((volatile unsigned long*)0xFFFFF204)) #define VICVectCntl2(*((volatile unsigned long*)0xFFFFF208)) #define VICVectCntl3(*((volatile unsigned long*)0xFFFFF20C)) #define VICVectCntl4(*((volatile unsigned long*)0xFFFFF210))#define VICVectCntl5(*((volatile unsigned long*)0xFFFFF214))#define VICVectCntl6(*((volatile unsigned long*)0xFFFFF218))#define VICVectCntl7(*((volatile unsigned long*)0xFFFFF21C)) #define VICVectCntl8(*((volatile unsigned long*)0xFFFFF220))#define VICVectCntl9(*((volatile unsigned long*)0xFFFFF224))#define VICVectCntl10(*((volatile unsigned long*)0xFFFFF228))#define VICVectCntl11(*((volatile unsigned long*)0xFFFFF22C)) #define VICVectCntl12(*((volatile unsigned long*)0xFFFFF230))#define VICVectCntl13(*((volatile unsigned long*)0xFFFFF234))#define VICVectCntl14(*((volatile unsigned long*)0xFFFFF238))#define VICVectCntl15(*((volatile unsigned long*)0xFFFFF23C))/*General Purpose Input/Output(GPIO)*//*通用并行IO口的特殊寄存器*/#define IO0PIN(*((volatile unsigned long*)0xE0028000)) #define IO0SET(*((volatile unsigned long*)0xE0028004)) #define IO0DIR(*((volatile unsigned long*)0xE0028008)) #define IO0CLR(*((volatile unsigned long*)0xE002800C))/*Pin Connect Block*//*管脚连接模块控制寄存器*/#define PINSEL0(*((volatile unsigned long*)0xE002C000)) #define PINSEL1(*((volatile unsigned long*)0xE002C004))/*Universal Asynchronous Receiver Transmitter0(UART0)*//*通用异步串行口0(UART0)的特殊寄存器*/#define U0RBR(*((volatile unsigned char*)0xE000C000)) #define U0THR(*((volatile unsigned char*)0xE000C000)) #define U0IER(*((volatile unsigned long*)0xE000C004)) #define U0IIR(*((volatile unsigned long*)0xE000C008)) #define U0FCR(*((volatile unsigned char*)0xE000C008)) #define U0LCR(*((volatile unsigned char*)0xE000C00C)) #define U0LSR(*((volatile unsigned char*)0xE000C014)) #define U0SCR(*((volatile unsigned char*)0xE000C01C)) #define U0DLL(*((volatile unsigned char*)0xE000C000)) #define U0DLM(*((volatile unsigned char*)0xE000C004)) #define U0ACR(*((volatile unsigned long*)0xE000C020)) #define U0TER(*((volatile unsigned char*)0xE000C030))/*Universal Asynchronous Receiver Transmitter1(UART1)*//*通用异步串行口1(UART1)的特殊寄存器*/#define U1RBR(*((volatile unsigned char*)0xE0010000)) #define U1THR(*((volatile unsigned char*)0xE0010000)) #define U1IER(*((volatile unsigned char*)0xE0010004)) #define U1IIR(*((volatile unsigned char*)0xE0010008)) #define U1FCR(*((volatile unsigned char*)0xE0010008)) #define U1LCR(*((volatile unsigned char*)0xE001000C)) #define U1MCR(*((volatile unsigned char*)0xE0010010)) #define U1LSR(*((volatile unsigned char*)0xE0010014)) #define U1MSR(*((volatile unsigned char*)0xE0010018)) #define U1SCR(*((volatile unsigned char*)0xE001001C)) #define U1DLL(*((volatile unsigned char*)0xE0010000))#define U1DLM(*((volatile unsigned char*)0xE0010004)) #define U1ACR(*((volatile unsigned long*)0xE0010020)) #define U1TER(*((volatile unsigned char*)0xE0010030))/*I2C(8/16bit data bus)*//*芯片间总线(I2C)的特殊寄存器*/#define I2CONSET(*((volatile unsigned char*)0xE001C000)) #define I2CSTAT(*((volatile unsigned char*)0xE001C004)) #define I2DAT(*((volatile unsigned char*)0xE001C008)) #define I2ADR(*((volatile unsigned char*)0xE001C00C)) #define I2SCLH(*((volatile unsigned int*)0xE001C010)) #define I2SCLL(*((volatile unsigned int*)0xE001C014)) #define I2CONCLR(*((volatile unsigned char*)0xE001C018))/*SPI(Serial Peripheral Interface)*//*SPI总线接口的特殊寄存器*/#define SPI_SPCR(*((volatile unsigned short*)0xE0020000)) #define SPI_SPSR(*((volatile unsigned char*)0xE0020004)) #define SPI_SPDR(*((volatile unsigned short*)0xE0020008)) #define SPI_SPCCR(*((volatile unsigned char*)0xE002000C)) #define SPI_SPINT(*((volatile unsigned char*)0xE002001C))/*Timer0*//*定时器0的特殊寄存器*/#define T0IR(*((volatile unsigned char*)0xE0004000))#define T0TCR(*((volatile unsigned char*)0xE0004004)) #define T0TC(*((volatile unsigned long*)0xE0004008)) #define T0PR(*((volatile unsigned long*)0xE000400C)) #define T0PC(*((volatile unsigned long*)0xE0004010)) #define T0MCR(*((volatile unsigned short*)0xE0004014)) #define T0MR0(*((volatile unsigned long*)0xE0004018)) #define T0MR1(*((volatile unsigned long*)0xE000401C)) #define T0MR2(*((volatile unsigned long*)0xE0004020)) #define T0MR3(*((volatile unsigned long*)0xE0004024)) #define T0CCR(*((volatile unsigned short*)0xE0004028)) #define T0CR0(*((volatile unsigned long*)0xE000402C)) #define T0CR1(*((volatile unsigned long*)0xE0004030)) #define T0CR2(*((volatile unsigned long*)0xE0004034)) #define T0CR3(*((volatile unsigned long*)0xE0004038)) #define T0EMR(*((volatile unsigned short*)0xE000403C)) #define T0CTCR(*((volatile unsigned long*)0xE0004070)) #define PWM0CON(*((volatile unsigned long*)0xE0004074))/*Timer1*//*定时器1的特殊寄存器*/#define T1IR(*((volatile unsigned char*)0xE0008000))#define T1TCR(*((volatile unsigned char*)0xE0008004)) #define T1TC(*((volatile unsigned long*)0xE0008008)) #define T1PR(*((volatile unsigned long*)0xE000800C)) #define T1PC(*((volatile unsigned long*)0xE0008010))#define T1MCR(*((volatile unsigned short*)0xE0008014)) #define T1MR0(*((volatile unsigned long*)0xE0008018)) #define T1MR1(*((volatile unsigned long*)0xE000801C)) #define T1MR2(*((volatile unsigned long*)0xE0008020)) #define T1MR3(*((volatile unsigned long*)0xE0008024)) #define T1CCR(*((volatile unsigned short*)0xE0008028)) #define T1CR0(*((volatile unsigned long*)0xE000802C)) #define T1CR1(*((volatile unsigned long*)0xE0008030)) #define T1CR2(*((volatile unsigned long*)0xE0008034)) #define T1CR3(*((volatile unsigned long*)0xE0008038)) #define T1EMR(*((volatile unsigned short*)0xE000803C)) #define T1CTCR(*((volatile unsigned long*)0xE0008070)) #define PWM1CON(*((volatile unsigned long*)0xE0008074))/*Timer2*//*定时器2的特殊寄存器*/#define T2IR(*((volatile unsigned char*)0xE0070000))#define T2TCR(*((volatile unsigned char*)0xE0070004)) #define T2TC(*((volatile unsigned short*)0xE0070008)) #define T2PR(*((volatile unsigned short*)0xE007000C)) #define T2PC(*((volatile unsigned short*)0xE0070010)) #define T2MCR(*((volatile unsigned short*)0xE0070014)) #define T2MR0(*((volatile unsigned short*)0xE0070018)) #define T2MR1(*((volatile unsigned short*)0xE007001C)) #define T2MR2(*((volatile unsigned short*)0xE0070020)) #define T2MR3(*((volatile unsigned short*)0xE0070024))#define T2CCR(*((volatile unsigned short*)0xE0070028)) #define T2CR0(*((volatile unsigned short*)0xE007002C)) #define T2CR1(*((volatile unsigned short*)0xE0070030)) #define T2CR2(*((volatile unsigned short*)0xE0070034)) #define T2CR3(*((volatile unsigned short*)0xE0070038)) #define T2EMR(*((volatile unsigned short*)0xE007003C)) #define T2CTCR(*((volatile unsigned long*)0xE0070070)) #define PWM2CON(*((volatile unsigned long*)0xE0070074))/*Timer3*//*定时器3的特殊寄存器*/#define T3IR(*((volatile unsigned char*)0xE0074000))#define T3TCR(*((volatile unsigned char*)0xE0074004)) #define T3TC(*((volatile unsigned short*)0xE0074008)) #define T3PR(*((volatile unsigned short*)0xE007400C)) #define T3PC(*((volatile unsigned short*)0xE0074010)) #define T3MCR(*((volatile unsigned short*)0xE0074014)) #define T3MR0(*((volatile unsigned short*)0xE0074018)) #define T3MR1(*((volatile unsigned short*)0xE007401C)) #define T3MR2(*((volatile unsigned short*)0xE0074020)) #define T3MR3(*((volatile unsigned short*)0xE0074024)) #define T3CCR(*((volatile unsigned short*)0xE0074028)) #define T3CR0(*((volatile unsigned short*)0xE007402C)) #define T3CR1(*((volatile unsigned short*)0xE0074030)) #define T3CR2(*((volatile unsigned short*)0xE0074034)) #define T3CR3(*((volatile unsigned short*)0xE0074038))#define T3EMR(*((volatile unsigned short*)0xE007403C)) #define T3CTCR(*((volatile unsigned long*)0xE0074070)) #define T3PWMCON(*((volatile unsigned long*)0xE0074074))/*Real Time Clock*//*实时时钟的特殊寄存器*/#define ILR(*((volatile unsigned char*)0xE0024000))#define CTC(*((volatile unsigned short*)0xE0024004)) #define CCR(*((volatile unsigned char*)0xE0024008)) #define CIIR(*((volatile unsigned char*)0xE002400C))#define AMR(*((volatile unsigned char*)0xE0024010)) #define CTIME0(*((volatile unsigned long*)0xE0024014)) #define CTIME1(*((volatile unsigned long*)0xE0024018)) #define CTIME2(*((volatile unsigned long*)0xE002401C)) #define SEC(*((volatile unsigned char*)0xE0024020))#define MIN(*((volatile unsigned char*)0xE0024024)) #define HOUR(*((volatile unsigned char*)0xE0024028)) #define DOM(*((volatile unsigned char*)0xE002402C)) #define DOW(*((volatile unsigned char*)0xE0024030)) #define DOY(*((volatile unsigned short*)0xE0024034)) #define MONTH(*((volatile unsigned char*)0xE0024038)) #define YEAR(*((volatile unsigned short*)0xE002403C)) #define ALSEC(*((volatile unsigned char*)0xE0024060)) #define ALMIN(*((volatile unsigned char*)0xE0024064)) #define ALHOUR(*((volatile unsigned char*)0xE0024068))#define ALDOM(*((volatile unsigned char*)0xE002406C)) #define ALDOW(*((volatile unsigned char*)0xE0024070)) #define ALDOY(*((volatile unsigned short*)0xE0024074)) #define ALMON(*((volatile unsigned char*)0xE0024078)) #define ALYEAR(*((volatile unsigned short*)0xE002407C)) #define PREINT(*((volatile unsigned short*)0xE0024080)) #define PREFRAC(*((volatile unsigned short*)0xE0024084))/*Watchdog*//*看门狗的特殊寄存器*/#define WDMOD(*((volatile unsigned char*)0xE0000000)) #define WDTC(*((volatile unsigned long*)0xE0000004)) #define WDFEED(*((volatile unsigned char*)0xE0000008)) #define WDTV(*((volatile unsigned long*)0xE000000C))/*ADC特殊寄存器*/#define AD0CR(*((volatile unsigned long*)0xE0034000)) #define AD0GDR(*((volatile unsigned long*)0xE0034004)) #define AD0STAT(*((volatile unsigned long*)0xE0034030)) #define AD0INTEN(*((volatile unsigned long*)0xE003400C)) #define AD0DR0(*((volatile unsigned long*)0xE0034010)) #define AD0DR1(*((volatile unsigned long*)0xE0034014)) #define AD0DR2(*((volatile unsigned long*)0xE0034018)) #define AD0DR3(*((volatile unsigned long*)0xE003401C)) #define AD0DR4(*((volatile unsigned long*)0xE0034020))#define AD0DR5(*((volatile unsigned long*)0xE0034024))#define AD0DR6(*((volatile unsigned long*)0xE0034028))#define AD0DR7(*((volatile unsigned long*)0xE003402C))/*Define firmware Functions*//*定义固件函数*/#define rm_init_entry()((void(*)())(0x7fffff91))()#define rm_undef_handler()((void(*)())(0x7fffffa0))()#define rm_prefetchabort_handler()((void(*)())(0x7fffffb0))()#define rm_dataabort_handler()((void(*)())(0x7fffffc0))()#define rm_irqhandler()((void(*)())(0x7fffffd0))()#define rm_irqhandler2()((void(*)())(0x7fffffe0))()#define iap_entry(a,b)((void(*)())(0x7ffffff1))(a,b)/********************************************************************************************************* **End Of File********************************************************************************************************/。
LPC2103学习板-数码管显示
LPC2103学习板-数码管显示数码管部分电路原理图:其中TRS 和TMS 使用了JTAG 口,所以在调试的时候不能使用普通IO 功能,需要程序烧写进入后,取消JTAG 模式,才能正常工作。
源程序:/**************ARM7(LPC2103)练习程序**************************//*************************************************************//*****File Function : 数码管显示*****//*****ProgramAuthor : ClimberWin *****//*****MCU :LPC2103F 外部12M 晶振*****//*****Compile Date : 2010/04/01 *****//*****Edition Info : V1.0*****//*************************************************************///编译环境KEIL for ARM//数据接口P0.10-P0.17//选通端P0.25 P0.26 P0.27P0.28//蜂鸣器P0.21//注:数码管使用到JTAG 引脚,所以运行时候需要JTAG不使能才能做普通IO 处理。
不然只能2 个数码管选通#include #include #define uint unsigned int#define uchar unsigned char//#define speak (1<<21) //蜂鸣器引脚定义#define COM1 (1<<25) //定义数码管1 的选通引脚#define COM2 (1<<26) // 定义数码管2 的选通引脚#define COM3 (1<<27) //定义数码管3 的选通引脚#define COM4 (1<<28) //定义数码管4 的选通引脚void delayms(unsigned int count);//延时程序void led_display(void);//显示程序uchar LED_DATA[16]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0x88,0x83,0xC6,0xA1,0 x86,0x8E};/*************延时程序***************/void delayms(unsigned intcount){unsigned int i,j;for(i=0;i<count;i++)for(j=0;j<1000;j++);}voidled_display(void){float led_data; IO0CLR=0xffffffff; led_data=LED_DATA[4]<<10;IO0SET=led_data; IO0CLR=COM1; IO0SET=COM2; IO0SET=COM3;。
ARM单片机学习资料

对于UC/OS而言搞清任务的调度,信号的传递,c/c++的
程度至少也要熟练,或者有过完整的51程序设计经历也就可以了。
最后我建议边学便接触,毕竟动手的结果和看书会有不同,
动手遇到问题再学习正对性强!理解也深刻!”
“ 要学习操作系统的话你必须对硬件有一定的了解.
最后是引用论坛里几个网友的经验:
“ 了解arm的工作原理,寄存器的结构,引脚功能。
C是基础,一定要学好。
开发板是要买的,一般都是s3c2410,或者2440
建议买实体书,经常要翻的,看电子的很麻烦。 ”
“ 楼主真要学的话还是建议买一套嵌入式系统学习开发
对于ARM7硬件体系的学习,就建议这两本教材配合使用。具体使用建议以《深入浅出》为主(可以只看上册),参照《基础教程》掌握启动代码的改写,并配合ppt课件,以实现快速掌握ARM的框架,能够完成简单的应用后再深入研究各个细节。
《嵌入式实时操作系统μCOS-Ⅱ原理及应用》(22.00)
上册前两章为基于EasyARM2131的编译环境介绍,后三章功能部件的详细介绍与使用。下册是基于UCOS-Ⅱ操作系统的应用。
优点:每个章节都有配套实验和程序代码,非常适合初学者对ARM体系建立整体框架,简洁实用。
缺点:没有对汇编语言的讲解,在研究启动代码时有些不方便。而且你的板子并不是2104,启动代码会与书中例子不同,需要自己修改。(这一点可以参看基础教程弥补。)
总的来说就是推荐三本书和一套课件--《深入浅出ARM7--LPC213x(上.下)》、《ARM嵌入式系统基础教程》、《嵌入式实时操作系统μCOS-Ⅱ原理及应用》和《ARM嵌入式系统基础教程》一书配套课件。
课件如果需要的话,你可以把邮箱留下,我给你发过去。
LPC2103开发板

LPC2103开发板LPC2103开发板硬件资源:中央处理器◆ LPC2103(PHILIPS),ARM7TDMI-S,最高频率70MHz,片内32K字节Flash,8K字节SRAM;RS232串行接口◆两个三线RS232接口,其中一个用作ISP;;调试及下载接口◆一个20芯Multi-ICE标准JTAG接口,支持IAR等调试;输入输出接口◆两个接到IO口的小按键,两个个IO口控制的高亮LED;◆一个可调电位器接到ADC上可以做ADC实验;◆ 8个由移位寄存器控制的高亮LED;其他◆一个后备锂电池,用于RTC实时时钟;◆一个复位按键,并采用专用复位芯片进行复位;◆一个外部扩展槽,引出了IO口、中断、ADC、电源和地线等几乎所有CPU资源;◆一个2×10厘米的实验板区域;用户光盘上提供的开发工具和源代码:1) IAR集成开发环境(32K限制版);2) 串口工具软件dnw.exe;3) Philips的内部Flash烧写工具4) IAR开发环境下的DEMO程序(包括led跑马灯,外部中断,UART,RTC,ADC等)5) LPC2103电路原理图(pdf格式);6) 开发板上部分芯片手册、资料;7) KEIL for ARM 集成开发环境;8) ADS集成开发环境;9) ADS开发环境下的DEMO程序(包括led跑马灯, UART)和uc/os在LPC2103上的移植程序;10) KEIL集成开发环境下的DEMO程序(包括led跑马灯, UART,timer等)。
11)JTAG的使用方法和驱动LPC2103套件包括:1) 一块已测试好的LPC2103开发板2) 一张用户光盘3)一条JTAG线4)一个JTAG调试器(注:USB线请用户自己去买)。
基于ARM7 TDMI-S CPU的LPC2103的多功能电子钟
基于ARM7 TDMI-S CPU的LPC2103的多功能电子钟一、课程设计内容与要求1)时钟显示功能,采用数码管的动态扫描工作方式,可通过键盘分别选择显示年或者月/日或者时/分或者分/秒,2)在键盘电路中,第一次中断判断有无键按下,若有按下则实行定时一次,下一次中断开始扫描。
3)具有校准年、月、日、时、分的功能。
4)闹钟功能,可按设定的时间闹时,随时开启或关闭闹钟。
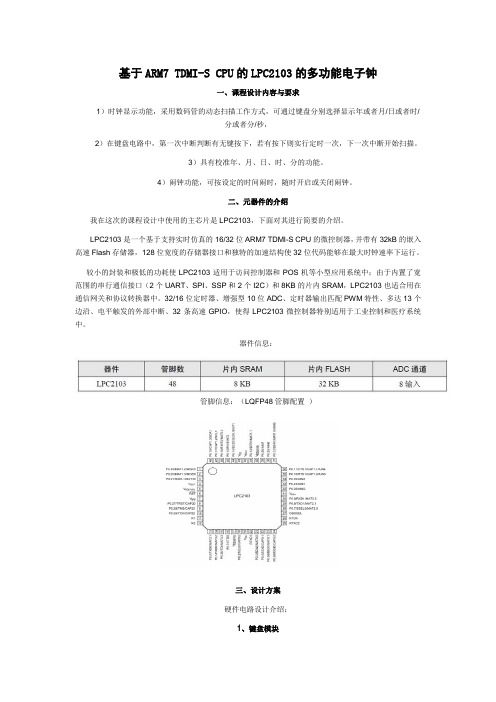
二、元器件的介绍我在这次的课程设计中使用的主芯片是LPC2103,下面对其进行简要的介绍。
LPC2103是一个基于支持实时仿真的16/32位ARM7 TDMI-S CPU的微控制器,并带有32kB的嵌入高速Flash存储器,128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行。
较小的封装和极低的功耗使LPC2103适用于访问控制器和POS机等小型应用系统中;由于内置了宽范围的串行通信接口(2个UART、SPI、SSP和2个I2C)和8KB的片内SRAM,LPC2103也适合用在通信网关和协议转换器中。
32/16位定时器、增强型10位ADC、定时器输出匹配PWM特性、多达13个边沿、电平触发的外部中断、32条高速GPIO,使得LPC2103微控制器特别适用于工业控制和医疗系统中。
器件信息:管脚信息:(LQFP48管脚配置)三、设计方案硬件电路设计介绍:1、键盘模块整个硬件上总共使用了10个独立键盘,4个是开发板上原有的按键,6个是我利用多余的IO引脚焊接的按键。
按键在没有被按下时,10个按键(P0.16 P0.14 P0.15 P0.18 P0.2 P0.3 P0.4 P0.5 P0.27 P0.6 P0.7)通过10K的电阻连接到3.3V的高电平,当按键被按下时,和GND相连接,被置为低电平。
2、数码管显示模块使用串行输入/并行输出的8位移位寄存器74HC164,该移位寄存器是上升沿有效,将8位笔段码送给共阳数码管。
ARMLPC2103定时器中断方式寄存器设置
ARM LPC2103定时器中断方式寄存器设置
定时器查询方式定时器初始化:
1、设置定时器分频数,为(x+1)分频
2、匹配通道 X 中断并复位 TxTC
3、比较值( 1S 定时值)
4、启动并复位 TxTC
如:
T1PR = 99; // 设置定时器 0 分频为 100 分频,得 110592Hz
T1MCR = 0x03; //匹配通道0匹配中断并复位T0TC
T1MR0 = 110592/2; // 比较值( 1S 定时值)
T1TCR = 0x03; // 启动并复位 T0TC
T1TCR = 0x01;
研究了好长一段时间,LPC210X 的定时器,查询方式定时很简单如上面,但中断方式要操作好多寄存器,太麻烦,一直是一头雾水。
好不容易理出了思路,现将一段例程粘贴备忘。
#include 《 intrinsics.h》
#include 《 stdio.h》
#include 《 iolpc2103.h》
// OSC [ Hz]
#define FOSC 11059200UL
// Core clk [Hz]
#define FCCLK FOSC
// Per clk [Hz]
#define PCCLK (FOSC/4)
// TImer TIck per second。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
while(1)
{
led_display(); //调用延时
}
}
IO0PIN=(IO0PIN&0x000000ff)|(weima[a]<<8);
//保持P00-P07的数据不变,
//同时在P08-P015写入位数据
delayms(10);//延时
IO0PIN=(0x00000000); //P0复位,不再为指定的位保存数据
IO0CLR=0xffffffff;
for(i=0;i<count;i++)
for(j=0;j<1000;j++);
}
void led_display(void)
{
float led_data; //定义一个32位变量
IO0CLR=0xffffffff;//清零
xs[0]=nian1/10;
/*****Edition Info : V1.0 *****/
/*************************************************************/
//编译环境 KEIL for ARM
//段码数据接口 P0.0-P0.7
//#define speak (1<<21) //蜂鸣器引脚定义
void delayms(unsigned int count);//延时程序
void led_display(void);//显示程序
uchar LED_DATA[16]={0xC0,0xF9,0xA4,0xB0,0x99,
0x92,0x82,0xF8,0x80,0x90};//段码
uchar weima[]={0x1,0x2,0x4,0x8,0x10,0x20,0x40,0x80};//位码
/*************延时程序***************/
void delayms(unsigned int count)
/*****Program Author : 王海洋 *****/
/*****MCU : LPC2103F 外部12M晶振 *****/
/*****Compile Date : 2014/06/27 *****/
}
}
/////////////主程序///////////////////
int main(void)
{
PINSEL0 |= 0x00000000;//P00-P015为GPIO
PINSEL1 |= 0x00000000; //P016-P031为GPIO
xs[1]=nian1%10;
xs[2]=nian2/10;
xs[3]=nian2%10;
for(a=0;a<4;a++)
{
led_data=(LED_DATA[xs[a]]<<0); //在P00-P07写入段码数据
IO0SET=led_data; //写入段码数据
//位码数据接口 P0.8 P0.9 P0.10 P0.11
#include <stdio.h>
#include <LPC21xx.H>
#define uint unsigned int
#define uchar unsigned char
uchar a,nian1=20,nian2=14,xs[4];
/**************ARM7(LPC2103)练习程序**************************/
/*************************************************************/
/*****File Function : 数码管显示 *****/