车辆工程毕业设计28折叠臂式高空作业车论文
基于伸缩式高空作业车设计探讨

基于伸缩式高空作业车设计探讨(云南远鹏装饰设计工程有限公司)摘要:文章主要阐述了伸缩式高空作业车主要机构的设计原理,并对整机稳定性进行了分析。
通过分析,该设备有普通高空作业设备的全部功能,具有回缩尺寸小,伸缩量、工作幅度大,操作灵活等特点,适用于作业空间狭小、尺寸要求严格的工作环境。
关键词:高空作业车;伸缩臂;摆臂;稳定性前言:近年来,随着建筑业的发展,各类起重机得到了广泛的应用。
在一些特殊工作条件下,为进行设备和物料的输送,特殊起重设备应运而生。
狭小空间内,如多层地下建筑,当需要从底层孔洞向顶层输送维修人员及物料时,要求升降机构全缩尺寸很小且全伸尺寸很大,工作机构的可达位置还要能够覆盖较大的作业空间,升降机构上往往附有回转工作平台,受力情况复杂,对设备的强度和结构刚性提出了更高要求。
一、伸缩式高空作业车设计方案伸缩式高空作业车主要采用垂直升降形式,展开时工作幅度大,回缩时外形尺寸小,结构紧凑,整机分为升降机构、变幅机构、回转机构和行走机构,其整机模型如图1所示。
图1 整机模型1.1升降机构由于升降距离较大,为提高设备刚度,升降机构采用箱型伸缩臂。
伸缩机构由3节臂组成,伸缩臂采用箱形结构,采用液压油缸和钢丝绳滑轮系统进行伸缩。
图2为采用1个单级液压缸和1套钢丝绳滑轮系统的同步伸缩机构。
油缸伸缩杆与基本臂由销轴铰接,缸体与第二节臂由销轴铰接。
钢丝绳a绕过滑轮a,一端由销轴与第三节臂相连,另一端与基本臂相连。
钢丝绳b绕过滑轮b,一端与基本臂相连,另一端与第三节臂相连。
滑轮b装在第二节臂上。
滑轮a装在液压缸体头部。
当缸体带动第二节臂伸出时,滑轮a随缸体上升,通过钢丝绳a拉动第三节臂上升。
第三节臂的同步缩回,是由钢丝绳b完成的,其动作原理与同步伸出完全一样。
1-基本臂;2-油缸伸缩杆;3-油缸缸体;4-第二节臂;5-第三节臂;6-滑轮a;7-钢丝绳a;8-钢丝绳b;9-滑轮b图2 伸缩臂同步伸缩原理图1.2变幅机构图3为双油缸串联调平机构原理图。
高空作业车上车工作装置设计论文

武汉科技大学毕业设计高空作业车上车工作装置设计The design of ariel work platform upside mechanism学生姓名孙钊学院名称机电自动化学院专业名称机电一体化指导教师陈新元2014年5月26日摘要高空作业车主要应用于路灯、电力、交通、高速公路、造船修船、通信、建筑、园林、广告、机场、港口、有线电视等行业,使用面广、作业效率高、安全方便,拥有巨大的市场潜力。
本课题主要是对其上车部分进行理论分析、计算并进行结构设计。
高空作业车是由两个机械臂组成,合理确定其一些基本尺寸,运用理论力学知识对其受力分析,用材料力学知识进行强度校核,确定其他尺寸。
根据负载条件,选择液压元件,设计液压系统。
运用绘图软件Pro-e , CAD,画出零件图和装配图。
可靠性设计可以保证高空作业车有足够的强度,有利于保证生产的安全。
关键词受力分析;强度校核;液压系统;零件图和装配图目 录摘要 (I)1 绪论 (1)1.1高空作业车的作用和意义 (1)1.1.1高空作业车简介 (1)1.1.2高空作业车用途 (1)1.1.3高空作业车的技术特点 (1)1.1.4选题意义 (3)1.1.5外国高空作业车的发展概况 (3)1.1.6国内高空作业车发展状况 (3)2上车机构的机械原理设计和分析 (6)2.1上车机构的组成部分 (6)2.2上车结构图 (7)2.3机械设计分析 (8)3 上车机构传动结构设计 (8)3.1上车机构的受力分析 (8)3.2参数确定 (10)3.2.1杆长确定 (10)3.2.2确定参数4321,,,θθθθ的范围 (10)3.2.3初定断面尺寸 (12)3.3可靠性设计 (14)3.3.1臂L 1强度校核 (15)3.3.2臂L 2强度校核 (17)3.3.3铰接旋转轴的强度校核 (20)4.2液压系统设计概述 ............................................................................. 错误!未定义书签。
折叠臂式高空作业车设计
海量机械毕业设计,请联系Q99872184摘要本设计主要以小型折臂式高空作业车上、下臂结构为研究对象,对上、下臂进行结构和该车上`的设计。
主要分两部分进行阐述,第一部分:根据高空作业车的最大高度10米,在满足作业高度的前提下,进行高空作业臂的结构设计:首先根据作业载荷使用要求选择作业臂材料类型;其次根据最大作业高度确定上、下长度;在经过受力分析利用强度来确定臂的截面尺寸,进而校核强度、刚度、稳定性,查看作业臂的尺寸是否符合要求。
对施加均布载荷和约束,进行结构的强度和刚度的分析,确定危险截面或危险点的应力分布及变形,最后画出作业臂的总装图。
第二部分:液压控制部分主要是指控制上下臂变幅运动的液压缸。
文中详细记录了高空作业机构上下臂液压缸的设计过程,在确定液压系统元件参数的基础上,完成了液压传动系统的设计计算。
关键词:折叠臂式高空作业车,折叠臂式液压系统设计,专用汽车,设计I海量机械毕业设计,请联系Q99872184ABSTRACTIn this paper , to” high-altitude vehicles”,under the arm to study de structure of the upper and the lower arm to the vehicles structure and the design of the hydraulic system,mainly conducted in two parts on,high-aititude vehicles under one of the largest 10 meters high degree of operating,to meet the high degree of operating under the premise of a high-aititude operations arm of the structural design ,first,the use of operating arm asked to choose the type of material and secondly in accordance with the largest Operating highly determined ,under the arm length ;another use of force analysis to determine the strength of the arm section size and location of the fuel tank of the hinged ;further strength ,stiffness,the stability of checking to see whether the size of the operating arm to meet the requirements .to impose uniform loading and constraints ,structural strength and stiffness analysis, risk and danger point cross-section of the stress and deformation ,finally draw operating arm and hand ,arm parts under the plans .and hydraulic control of the mainly refers to control the movement from the top to bottom arm change hydraulic cyclinders .In a detailed record of the agencies operating at high altitude upper arm hydraulic cylinders and hydraulic cylinders under the arm of the design of process .In the determining the parameters of the hydraulic system components ,based on the completion of the hydraulic system desion and calculation.Key words: Folded-arm high-altitude vehicles Folding arm type hydraulic system design Special Vehicle DesignII海量机械毕业设计,请联系Q99872184目录摘要 (I)ABSTRACT (II)第1章绪论 (6)1.1课题的背景 (6)1.2小型折叠臂式高空作业车的发展概况 (7)1.3国内外折叠臂式高空作业车的发展概况 (7)1.4论文研究基本内容 (8)第2章折叠臂式高空作业车作业臂设计 (9)2.1高空作业臂选择 (9)2.1.1高空作业臂分析 (9)2.1.2作业臂作业状态主要技术参数 (9)2.1.3 作业臂材料选择 (10)2.2上下臂的计算与校核 .................................................. 错误!未定义书签。
自行式高空作业车折叠臂动态特性研究

2 折 叠臂 结构 模 态 分 析
21 模态 分析 简介 .
模 态 分 析 用 于 确定 系 统 结 构 的 振 动 特 性 即确 定 系统 的 固有 频率 和相 应振 型 ,两 者在 系统 的动 载 结构 设计 中是 分析 的最 主要 参数 ,模 态分析 还可 以 作 为求解 系统 其它 动态 特性 问题分 析 的初始 点 ,例
高空作业车具有质量轻 、高度低 、极强的避障能力 和向下运送等特点 。 折 叠臂 由大 臂 、小臂 、工作平台 、大小臂油 缸 和 调平 机 构几 部 分组 成 ,其三 维 图 如 图 l 示 。 所
大 臂和连 接架 之 间 、大 臂油缸 和 连接架 之 间 、大 小 臂 之 间以及小 臂 和工作 平 台之 间均通过 销轴 连接 ,
Dy a cc aa trs c td ftesl p o e e eilfligj n mi h rcei issu y o h ef rp l d ara odn i t - l b
LI W e - U n wu, HU a g s e g, LU a - i Ch n - h n Nin l
l 高空作业车结构 及工作范围
某 高 空 作 业 车 由 底 盘 、 回 转 机 构 、 滑 台 机 构 、配重 和折 叠臂 等部 分组成 。其 工作 在一 层楼 板 上 ,该层 楼板 上有很 多 工作 柜 ,一层楼 板 和二层 楼 板 之 间还有 贯穿 的玻璃 横梁 ,并 且要求 折 叠臂 能将 工 作人员 和设 备等 向下 运送 到指定 的空 间位 置 ,该
厂 ]
‘ 、
J
/
3
1 I
汽车起重机伸缩臂系统设计 【汽车专业毕业论文】【答辩通过】

汽车专业毕业论文---答辩通过极具参考价值毕业设计(论文)题目汽车起重机伸缩臂系统设计目录前言 (1)摘要 (2)1 绪论 (2)1.1国内外汽车起重机发展概况及趋势 (2)1.2伸缩臂结构发展现状 (4)1.3伸缩臂机构形式介绍 (6)1.4本课题内容及重要意义 (7)2 QAY50汽车起重机主要技术参数和工作级别 (7)2.1QAY50起重机主要技术参数 (7)2.2QAY50汽车起重机的工作级别 (9)3伸缩臂传动方案和臂架截面的确定 (12)3.1伸缩臂传动方案的确定 (12)3.2伸缩臂架截面的确定 (14)4伸缩臂设计计算 (17)4.1起重机伸缩臂尺寸的确定 (17)4.2臂架伸缩液压缸的计算及选择 (22)4.3伸缩臂受力计算 (25)5伸缩臂有限元分析 (31)5.1伸缩吊臂有限元模型建立 (32)5.2计算结果与分析 (34)总结 (37)致谢 (38)参考文献 (39)汽车起重机伸缩臂系统设计摘要:臂架是起重机的主要承载构件。
起重机通过臂架直接吊载,实现大的作业高度与幅度。
臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。
所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。
本文主要根据QAY50吨汽车起重机工作要求来确定伸缩机构的结构和传动方案,进而采用传统的设计方法对主臂的三铰点、主臂的长度、及每节臂的长度、臂架的结构、液压缸尺寸进行确定,对臂架进行受力分析,利用有限元对臂架进行分析。
关键词:伸缩臂;液压缸;臂架结构,有限元分析Design of truck crane Telescopic boom systemAbstract:Boom is the main host of crane components. Directly through the jib crane hanging load, to achieve great height and range operations. Arm strength determines the maximum time from the weight lifting machine performance, its weight directly affect the machine overturning stability, structural design and therefore merits of boom, will directly affect the overall performance, such as the weight of the whole machine center of gravity height and machine stability. Thus, to ensure safe working conditions of boom to minimize the weight of boom, which improves overall quality and economy of great practical significance. Mainly based on XCMG truck crane 50 tons of requests to determine the structure and transmission expansion program, and then using the traditional design method is the main arm of the three nodes, the main arm length, arm length, and each section, Boom structure, determine the size of hydraulic cylinders.Keywords:Telescopic boom; hydraulic cylinder; Structure of boom ;ansys前言近年来,随着社会的发展,社会生活中对起重机的需求越来越大,但是,与国外汽车起重机相比,国外汽车起重机技术得到了飞速发展,所以国内起重机的研发越来越紧迫。
28米高空车参考资料

1.1高空作业车发展综述高空作业车是在工程起重机械基础上发展起来的高新技术产业,是特种专用车辆制造业中最高端的产品类型之一。
其工作范围既高又远(大高度高空作业平台的最大作业高度已达l00米,大概有35层楼高,最大作业半径达40米)的作业特征,能够大大提高高空作业人员的工作效率、作业活动质量和安全性,广泛应用于国民经济各个领域,是电力能源、矿山冶金、大型装备制造、国防、航空航天以及市政服务等产业部门中不可缺少的关键技术装备,因此高空作业车有着广阔的发展前景[1-3]。
自行式高空作业车按照工作臂的形式,可分为垂直升降式、折叠臂式、伸缩臂式、混合式四类。
垂直升降式高空作业车的升降机构只能在垂直方向上进行运动。
它的主要特点是结构简单,承载能力强,但作业范围小,作业高度低,这种结构型式应用比较少。
折叠臂式高空作业车工作臂之间的连接全部采用铰接型式,所以国外又把它叫做铰接式高空作业车。
折叠臂高空作业车结构适合于较低作业高度的车型,如要加大作业高度,必然要增加臂长或增加工作臂数量,增加臂长会使作业车体积庞大,降低灵活性;增加工作臂数量会造成操作繁琐,安全性降低。
伸缩臂式的高空作业车在行驶状态时,工作臂缩回套叠,工作时伸出,可以有效增大作业高度,同时具有工作效率高、操作简单、动作平稳等特点。
混合臂式高空作业车工作臂之间既有铰接,也有伸缩,是折叠臂式和伸缩臂式高空作业车的结合,它综合了两种结构型式的优点,工作性能最好,但结构也最为复杂。
图1-1为高空作业车的分类;图1-2为高空作业车的各种应用[4,5]。
(a)伸缩臂式(b)垂直升降式(c)折叠臂式图1-2 高空作业车分类Fig.1-2 The sort of aerial work platform(a)(b)(c)(d)图1-2 高空作业车的各种应用Fig.1-2 The applications of aerial work platform1.1.1 高空作业车国外发展现状欧美等发达国家和地区,高空作业车发展起步较早,从20世纪20年代就开始研制,已有近百年的发展历史。
高空作业车举升臂机构设计方案及液压控制

本科毕业设计题目高空作业车举升臂机构设计及液压控制系别工程技术系专业机械设计制造及其自动化学生姓名学号指导教师职称教授2013年04月18日摘要随着国家经济的不断发展,交通运输等基础行业发生着日新月异的变化。
高空作业车作为专用起重运输汽车的一种,它可以将工作人员和工作装备运送到达指定现场并进行作业的专用汽车。
高空作业车主要用于邮电通讯、市政建设、消防救护、建筑装饰、高空摄影以及造船、石油、化工、航空等行业。
它具有机动灵活、转移迅速、覆盖面广、便于接近、到达作业地点后能迅速投入工作等优点。
而且折叠臂式高空作业汽车结构比较简单,改装比较容易,因而发展比较快。
本设计主要内容是选择合适的二类底盘,在此基础上对高空作业车的主要工作装置进行设计。
通过对支腿机构、举升机构和回转机构的设计,进行各个应用元件布置,并采用液压系统对各个元件进行控制以实现举升和回转运动功能。
同时,还对高空作业车的附件进行了简单的设计,并对高空作业车的稳定性进行了计算分析,结果表明基本达到国家对改装车的标准要求。
关键词:高空作业车;支腿机构;举升机构;回转机构;设计AbstractWith the country's economic development, transportation and so on the basis of an ever-changing industry. Folding-arm high above the ground as a dedicated car lifting of a transport vehicle, which can be the work of staff and equipment arrived at the designated on-site delivery and operation of the Special Purpose Vehicle. Folding-arm high above the ground the main vehicle for posts and telecommunications, municipal construction, fire rescue, building decoration, high-altitude photography, as well as shipbuilding, petroleum, chemical, aviation and other industries. It has a flexible, rapid transfer, coverage for close to reach the sites quickly after getting a work of the advantages. And arm-folding high above the ground vehicle structure is relatively simple, relatively easy modification, and therefore faster development.The main content of this design is to choose a suitable chassis in the second category, on this basis of arm-folding work high above the main work of the car plant design. The outrigger body, lifting and turning the body design, layout components for various applications. And the use of the hydraulic system to control the various components in order to achieve lift and rotary motor function. At the same time, also folded-arm high above the ground Annex cars were simple design, and folded-arm high above the ground vehicle for the stability of the calculation and analysis, results showed that the modification of the basic national standards of vehicles.Key words:Folded-arm high above the ground vehicles。
车辆工程毕业设计9HD5050JGK高空作业车改装设计

摘要随着国家经济的不断发展,交通运输等基础行业发生着日新月异的变化。
折叠臂式高空作业车作为专用起重运输汽车的一种,它可以将工作人员和工作装备运送到达指定现场并进行作业的专用汽车。
折叠臂式高空作业车主要用于邮电通讯、市政建设、消防救护、建筑装饰、高空摄影以及造船、石油、化工、航空等行业。
它具有机动灵活、转移迅速、覆盖面广、便于接近、到达作业地点后能迅速投入工作等优点。
而且折叠臂式高空作业汽车结构比较简单,改装比较容易,因而发展比较快。
本设计主要内容是选择合适的二类底盘,在此基础上对折叠臂式高空作业车的主要工作装置进行设计。
通过对支腿机构、举升机构和回转机构的设计,进行各个应用元件布置,并采用液压系统对各个元件进行控制以实现举升和回转运动功能。
同时,还对折叠臂式高空作业车的附件进行了简单的设计,并对折叠臂式高空作业车的稳定性进行了计算分析,结果表明基本达到国家对改装车的标准要求。
关键词折叠臂式高空作业车,支腿机构,举升机构,回转机构,设计IABSTRACTWith the country's economic development, transportation and so on the basis of an ever-changing industry. Folding-arm high above the ground as a dedicated car lifting of a transport vehicle, which can be the work of staff and equipment arrived at the designated on-site delivery and operation of the Special Purpose Vehicle. Folding-arm high above the ground the main vehicle for posts and telecommunications, municipal construction, fire rescue, building decoration, high-altitude photography, as well as shipbuilding, petroleum, chemical, aviation and other industries. It has a flexible, rapid transfer, coverage for close to reach the sites quickly after getting a work of the advantages. And arm-folding high above the ground vehicle structure is relatively simple, relatively easy modification, and therefore faster development.The main content of this design is to choose a suitable chassis in the second category, on this basis of arm-folding work high above the main work of the car plant design. The outrigger body, lifting and turning the body design, layout components for various applications. And the use of the hydraulic system to control the various components in order to achieve lift and rotary motor function. At the same time, also folded-arm high above the ground Annex cars were simple design, and folded-arm high above the ground vehicle for the stability of the calculation and analysis, results showed that the modification of the basic national standards of vehicles.Key words Folded-arm high above the ground vehicles,Outrigger bodies, Lifting bodies, Body rotation, DesignII目录摘要 (I)ABSTRACT ............................................................................................................. I I 第1章绪论 (1)1.1概述 (1)1.2折叠臂式高空作业车的定义、组成及功用 (2)1.3国内外折叠臂式高空作业车的发展概况 (2)1.4设计目标和主要设计内容 (3)第2章折叠臂式高空作业车总体方案分析 (5)2.1动力传动装置设计与分析 (5)2.1.1设计要求 (5)2.1.2动力传动装置类型 (5)2.2工作装置设计与分析 (6)2.2.1支腿机构 (6)2.2.2举升机构 (9)2.2.3回转机构 (10)2.2.4作业平台及调平机构 (12)2.2.5操作及安全防护装置 (13)2.3本章小结 (15)第3章折叠臂式高空作业车总布置设计 (16)3.1 总体主要参数的确定 (16)3.1.1尺寸参数的确定 (16)3.1.2质量参数的确定 (16)3.2 折叠臂式高空作业车底盘的选择 (17)3.3副车架的选型与设计 (18)3.3.1副车架的界面形状尺寸 (19)3.3.2副车架的前端形状及安装位置 (20)3.3.3副车架与主车架的连接 (21)3.4本章小结 (22)第4章举升机构与回转机构设计计算 (24)4.1 举升机构设计 (24)4.1.1举升机构运动范围的确定 (24)4.1.2动臂的结构设计和主要尺寸确定 (24)4.2回转机构设计 (25)4.2.1确定圆柱滚子的最大载荷 (25)4.2.2确定圆柱滚子的允许载荷 (27)4.3本章小结 (28)第5章支腿机构和液压系统设计计算 (29)5.1 支腿机构设计计算 (29)5.1.1支腿跨距的确定 (29)5.1.2支撑脚接地面积确定 (33)5.2液压系统设计 (33)5.2.1液压系统原理分析 (33)5.2.2油缸选型确定 (34)5.2.3液压泵的选型与计算 (34)5.2.4油箱容积与管路内径计算 (37)5.2.5液压系统参数计算 (38)5.2.6液压泵的选型确定 (39)5.2.7取力器布置方案及基本参数选择 (40)5.3本章小结 (41)第6章折叠臂式高空作业车稳定性能分析 (43)6.1 支腿压力的计算 (43)6.2本章小结 (46)结论 (47)致谢 (48)参考文献 (49)1第1章绪论汽车工业发展的经济效益不只是汽车本身,而是集中表现在汽车的使用和流通的全过程中,随着汽车工业的发展必然是汽车运输业的发展,从而对专用汽车的性能要求也越来越高,使用越来越专门化,品种也越来越多。
高空作业车的液压系统毕业设计论文

编号无锡太湖学院毕业设计(论文)题目:高空作业车的液压系统信机系机械工程及自动化专业无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计高空作业车的液压系统设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计中特别加以标注引用,表示致谢的内容外,本毕业设计不包含任何其他个人、集体已发表或撰写的成果作品。
无锡太湖学院信机系机械工程及自动化专业毕业设计论文任务书一、题目及专题:1、题目高空作业的液压系统设计2、专题液压系统设计二、课题来源及选题依据①在大学课程中学习过液压,理论结合实际;②高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆,是将高空作业装置安装在汽车底盘上组成的。
高空作业装置包括工作臂、回转平台、副车架、工作斗、液压系统和操纵装置等。
现在的高空作业装置具有操作平顺、工作稳定、自动调速、安全可靠等优点,大大提高了空中作业的工作效率。
三、本设计应达到的要求:本毕业设计要求设计一辆11米高空作业车,其具体要求如下:①设计任务:高空作业车的液压系统设计②机器用途:通用型,适用于建筑、安装、管道铺设等高空作业。
③工作环境:风力六级以下,温度-20~30 ℃,无腐蚀性极易爆易燃性气体。
④作业部分主要技术参数最大作业高度:11-12米;最大作业半径: 5.5米;回转角度:360°;额定平台载荷:200kg;操作方式:下操作、上操作可以任意选择;支腿形式/数量:H型/4;旋转速度:0-3r/min;两支臂变幅时间:起臂:t≤70s;落臂:t≤6045s;支腿收放时间:收支腿:t≤60s;放支腿:t≤60s。
四、接受任务学生:机械91 班姓名贡涛五、开始及完成日期:自2012年11月20日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长研究所所长〕签名系主任签名2012年11月20日摘要高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆,是将高空作业装置安装在汽车底盘上组成的。
高空作业车改装设计-开题报告

目前我国高空作业车年销售量很低,与国外相比,产品技术水平差距较大,产品结 构单一,产品制造工艺落后,产品可靠性差等。
未来的“十二五”期间,我国的城市化进程将进一步加快,基础设施建设会进一步 加强,需要大量添置高空作业车进行市政工程的安装和运行维护;电力系统也将加快发 展,目前国家电网正大规模投资建设750kV以上的超高压输电网,需要大量的高空作业车 用于电网的建设和运营维护;随着我国工程设备租赁行业的发展,可以节约大量设备购 置资金的租赁方式将进一步促进高空作业车市场的发展,租赁行业将是高空作业车市场 需求量增长潜力最大的行业。如何适应市场需求并引导市场需求,高空作业车技术将如 何发展?这些都对高空作业车行业提出了更高的要求。 1)产品结构
毕业设计(论文)开题报告
学生姓名
指导教师姓 名
院 系
汽车与交通工程 学院
专 专业
车辆工程 是否外聘 □是■否
题目名称
高空作业车改装设计
一、课题研究现状、选题目的和意义 高空作业车研究现状: 1、专用汽车的现状
根据相关资料统计显示,目前我国专用汽车行业已有60%左右的企业建立了完整的 产品研发体系,具备独立的系列化产品开发能力。大部分专用汽车企业采用开发软件进 行模块化仿真设计,如AutoCAD、Pro/E、CATIA等,大大提高了研发质量和缩短了开发 周期。但是,我们还应该清醒地看到,目前我国专用汽车产品研发还处于较低水平,模 仿设计痕迹比较明显,技术雷同现象突出,并没有实现质的转变。
高空作业车安全操作与事故预防论文

高空作业车安全操作与事故预防论文摘要:任何事故的发生都不是偶然的,除去制造因素,人为因素占了很大一部分,通过高空车的安全事故我们也可以看到这一点。
高空作业车是一个复杂的高技术产品,如何让它安全、高效的为社会发展服务,不仅是制造厂要关注的问题,也是每一个使用高空车的单位、个人都要考虑的问题。
引言高空作业车即车载式高空作业平台。
随着经济水平的发展,高空作业车的需求量也越来越大。
高空作业车作为方便、快捷的载人高空作业专用设备,有效提高了高空作业的效率和安全性,但我们也看到仍有不少高空作业事故发生,其原因是多方面的,但违规操作及使用方法不当占了相当大的比重。
文章将从高空作业车的安全操作入手,告诉读者如何避免或者减少高空作业中事故的发生。
1 高空作业的安全操作操作人员、设备、环境的要求:所谓高空作业就是人使用一定的高空作业设备在特定的环境下工作。
要想保证作业的安全性:首先,我们要选用一台经过质量认证的合格的高空作业车产品,并且产品维护、保养及时,处于良好的工作状态,这是安全的保证。
其次,我们要注意使用的环境。
GB/T 9465-2008高空作业车标准中规定的工作条件为:(1)地面应坚实平整,作业过程中地面不应下陷;(2)环境温度为-25℃~+40℃;(3)风速不超过12.5m/s(6级风);(4)海拔高度不超过1000m;(5)环境相对湿度不大于90%(25℃)。
地面坚实与否是影响高空作业车稳定的重要因素,当地面松软,不足以支撑支脚时,必须在支脚下加垫支撑物(如厚木板),以增大支撑面积,减小对地面的压强。
强烈的风会使工作平台结构过载,超过规定风速,应立即停止工作。
对于绝缘车来说一定要注意环境相对湿度不能过大,否则会降低设备的绝缘效果,导致操作者生命受到威胁。
最后,操作人员的规范化培训。
高空作业车是集光机电液为一体的高技术装备,对于操作人员的要求较高,应选用专职驾驶员及操作人员,并对其进行培训,使他们掌握产品的通用知识、专用知识、操作方法、注意事项、操作禁令、维修维护等知识。
高空作业车举升机构设计
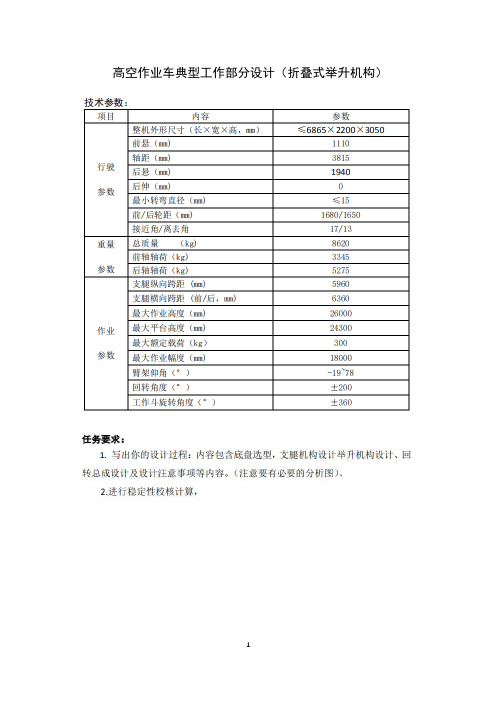
高空作业车典型工作部分设计(折叠式举升机构)一.底盘选择根据我国目前生产的各类型专用车辆的基本模式,大多是为了满足国民经济某一服务领域的特定使用要求,主要是在已定型的基本车型底盘的基础上,进行车身及工作装置的设计,与此同时对底盘各总成的结构与性能进行局部的更改设计与合理匹配,以达到满足使用需求的较为理想的整车性能。
 因此,专用汽车性能的好坏直接取决于专用汽车底盘的好坏,通常专用车辆所采用的基本底盘按结构分可分为二、三、四类底盘。
二类底盘是在整车基础上去掉货厢,三类底盘是从整车上去掉驾驶室与货厢,四类底盘是在三类底盘的上去掉车架总成剩下的散件。
 汽车底盘的选择主要是根据专用汽车的类型、用途、装载质量、使用条件、专用汽车的性能指标、专用设备或装置的外形、尺寸、动力匹配等决定,目前,几乎80%以上的专用车辆采用二类底盘进行改装设计。
采用二类汽车底盘进行改装设计工作重点是整车总体布置和工作装置设计,对底盘仅作性能适应性分析和必要的强度校核,以确保改装后的整车性能基本与原车接近。
在汽车底盘选型方面,一般应满足下述要求(1)适用性对于专用改装车底盘应适用于专用汽车特殊功能的要求,并以此为主要目标进行改装造型设计。
(2)可靠性:所选用汽车底盘要求工作可靠,出现故障的几率少,零部件要有足够的强度和寿命。
且同一车型各总成零部件的寿命应趋于平衡。
(3)先进性应使用整车在动力性、经济性、操纵稳定性、行驶平顺性及通过性等基本性能指标和功能方面达到同类车型的先进水平的汽车底盘。
而且在专用性能上要满足国家或行业标准的要求。
(4)方便性所选用的底盘要求便于安装、检查保养和维修,处理好结构紧凑与装配调试空间合理的矛盾。
选择江铃JX1083TK26底盘,参数如下二.支腿机构设计计算高空作业车的支腿机构起调平和保证整车工作稳定的作用,要求坚固可靠,操作方便。
1.支腿跨距的确定高空作业车的支腿一般为前后设置,并向两侧伸出,如图所示。
折叠臂式高空作业车设计

折叠臂式高空作业车设计一、设计背景随着城市建设的不断发展,高层建筑和大型设备的维护和维修变得越来越重要。
高空作业车作为一种实用的高空作业设备,被广泛应用于建筑、电力、石油等行业。
然而,传统的高空作业车在使用过程中存在一些问题,例如结构复杂、使用不便、操作受限等。
因此,设计一种折叠臂式高空作业车以解决这些问题具有很大的意义。
二、设计目标1.实现高空作业车的折叠设计,便于存储和运输。
2.简化高空作业车的结构,降低制造成本。
3.提高高空作业车的操作性能,以提高工作效率。
4.增加高空作业车的稳定性和安全性,减少事故发生的风险。
三、设计方案1.折叠设计:将高空作业车分为上部和下部两个部分,通过液压或电动机构实现折叠和展开。
在折叠状态下,可以将车辆体积减小到一个合适的尺寸,便于存储和运输。
2.简化结构:通过优化设计,减少部件数量和材料使用量,降低制造成本。
同时,采用轻量化材料如铝合金,提高载重能力和作业高度。
3.操作性能优化:增加电动转向机构,提高转向的灵活性和平稳性。
增加液压伸缩机构,实现折叠臂的伸缩,以适应不同的作业环境。
4.安全性设计:增加重心平衡系统,通过液压或电子控制保持车辆的稳定性。
增加封闭式驾驶室设计,提供更好的保护。
增加安全警示系统,提示操作员周围的危险情况。
四、技术实现1.折叠设计:采用液压或电动机构,控制折叠臂的展开和折叠。
通过设计合理的接合部位和锁扣机构,实现折叠时的安全和稳定。
2.结构简化:通过三维建模和有限元分析,优化设计结构和减少材料的使用。
采用铝合金材料,提高载重能力和作业高度。
采用模块化设计,方便维护和更换零部件。
3.操作性能优化:增加电动转向机构,通过电子控制实现转向的精确和平稳。
增加液压伸缩机构,通过液压泵和伸缩缸实现伸缩臂的伸缩。
4.安全性设计:增加重心平衡系统,通过液压或电子控制保持车辆的稳定性。
增加封闭式驾驶室设计,提供更好的保护。
增加安全警示系统,通过摄像头和传感器实时监测车辆周围的危险情况,并发送警报信号。
折臂式高空作业车回转工作台的设计
折臂式高空作业车回转工作台的设计何瑞德! 胡光忠! 陈婷婷! 周文军(!!T 四川轻化工大学机械工程学院"四川宜宾/))###&(T 西南科技大学制造科学与工程学院"四川绵阳/(!#!##摘%要 随着交通%建筑%煤矿等建设需求的不断增加"作业场合变得越来越复杂"作业难度也随之增加"对高空作业车的性能和功能要求也越来越高$为此"为应用较为广泛的折臂式高空作业车设计了回转装置"以单轴支承装置为主体"设计上%下托架结构"并进行有限元分析"以检验上下托架的结构强度和刚度是否满足要求"同时"对小臂受力变化后的受力分析也进行了计算$回转装置的设计使折臂式高空作业车在复杂作业环境中能顺利作业"并极大地提高了作业效率$关键词 高空作业车&工作平台&回转装置中图分类号 &'(!!+/%%文献标志码 ,%%文章编号 !##!-!./0 (#(" #"-#!#1-#$<"#23*.1#-":2*3:.%62*3/-$(1.%0.11.-+2*35..0$"%2$-:.%6,"'2&-"'G\6:8O=!"'456?;H 8K B7;H !"E 'G <&:;H 8M :;H !"]'[4a =;8f 6;(!!T@A B77C 7D ^=A B?;:A ?C G ;H :;==I :;H "@:A B6?;4;:F =I L :M N 7D @A :=;A =nG ;H :;==I :;H "c :Q:;/)"###"E B:;?&(T@A B77C 7D ^?;6D ?A M 6I :;H @A :=;A =?;O G ;H :;==I :;H "@76M BR =L M 4;:F =I L :M N 7D@A :=;A =?;O &=A B;7C 7H N"^:?;N ?;H /(!#!#"E B:;?#75#(%$&('a :M B M B=:;A I =?L :;H O=9?;O D 7I :;D I ?L M I 6A M 6I =A 7;L M I 6A M :7;L 6A B ?L M I ?;L S7I M ?M :7;"?I A B:M =A M 6I ="?;O A 7?C 9:;:;H "M B=R 7I >SC ?A =B?L Q=A 79=97I =?;O 97I =A 79SC =P "?;O M B=7S=I ?M :7;O:D D :A 6C M N B?L ?C L 7:;A I =?L =O ";O M B=I =g6:I =9=;M L D 7I M B=S=I D 7I 9?;A =?;O D 6;A M :7;7D ?=I :?C R 7I >F =B:A C =L B?F =?C L 7Q=A 79=B:H B=I ?;O B:H B=I T Z 7I M B:L I =?L 7;"?L C =R :;H O=F :A =:L O=L :H ;=O D 7I M B=D 7C O=O8?I 9?=I :?C R 7I >F =B:A C ="R B:A B :L R :O=C N 6L =OT &B=6SS=I ?;O C 7R =I QI ?A >=M L M I 6A M 6I =L ?I =O=L :H ;=O R :M B M B=L :;H C =8?P C =L 6SS7I M O=F :A =?L M B=9?:;Q7ON"?;O M B=D :;:M ==C =9=;M ?;?C N L :L :L A ?I I :=O 76M M 7A B=A >R B=M B=I M B=L M I 6A M 6I ?C L M I =;H M B ?;O L M :D D ;=L L 7D M B=6SS=I ?;O C 7R =I QI ?A >=M L 9==M M B=I =g6:I =9=;M L T ,M M B=L ?9=M :9="M B=L M I =L L ?D M =I M B=D 7I A =A B?;H =7D L 9?C C Q779:L ?;?C N K =OT &B=O=L :H ;7D M B=I 7M ?I N O=F :A ==;?QC =L M B=D 7C O:;H Q779?=I :?C R 7I >F =B:A C =M 7L 977M BC N R 7I >:;?A 79SC =P R 7I >:;H =;F :I 7;9=;M "R B:A B H I =?M C N :9SI 7F =L M B=R 7I >:;H =D D :A :=;A N T 8"9:.%+#'?=I :?C R 7I >F =B:A C =&R 7I >:;H SC ?M D 7I 9&I 7M ?I N O=F :A =收稿日期 (#("-#"-!#&修订日期 (#("-#)-(1基金项目 安徽省工程机械智能制造重点实验室开放课题基金资助!3^E ^(#(!#"#&四川轻化工大学研究生创新基金资助项目!c(#((#"1#作者简介 何瑞德!!..1-#"男"硕士研究生"四川轻化工大学"主要研究方向'机械设计及理论$通信作者 胡光忠!!.1(-#"男"博士"四川轻化工大学教授"主要研究方向'主要为现代理论设计和过程设备设计研究$#%前言高空作业车是一种将人%设备和物品等送到某个高度的专用车辆"广泛应用于建筑%交通%煤矿等工程作业中$高空作业车根据臂架伸展形式分为折臂式%直臂式%混合式和垂直升降式四种类型)!*$作为高空作业车"折臂式高空作业车因其结构简单"可通过各节臂之间形成的夹角"实现跨越空中障碍到达需要的作业位置而被广泛使用"但存在结构尺寸较大"作业时占用空间较大"作业范围较小"到达空间工作区域需要反复调整各节工作臂的仰角"操纵时间长"导致作业效率较低)(-)*$折臂式高空作业车因其工作+1#!+(#(";.+"%%%%%%%%%%%%%%%%%%重型机械平台长度较大"在一些狭窄的巷道%建筑工地等空间无法进行作业$因此"为了提高折臂式高空作业车在狭隘空间作业的效率和灵活性"增加回转装置是必要的$增加回转装置可以更好地实现特种装备作业"也可以更好地实现工作平台的位置调整"从而提高工作效率和灵活性$高空作业车的工作平台属于高空特种工作平台"工程实践过程中"工作平台固定在小臂一端"只能通过重新调整臂架结构来实现对工作平台的位置进行调整$同时工作平台是工作人员操作%特种装备作业的平台"需要保证作业平稳"结构强度可靠$如果回转平台出现故障问题"会导致平台失稳"造成安全问题)V-1*$笔者考虑到工作平台安全问题以及常用回转机构设计工作平台回转装置"并结合有限元计算分析"验证该装置的结构强度%刚度"以提高工作效率和灵活性$本文设计要求是在整车长度增加"X以内"其他尺寸和参数不改变的条件下实现工作平台围绕其连接工作臂h$#k以上的旋转"设计其回转装置$!%工作平台回转设计!+!%回转中心选择在排除外界因素干扰的情况下"回转中心的选择影响着工作平台在回转过程是否与自身机架发生干涉$根据工作平台与小臂的基本结构为轴对称结构"增加回转机构后回转中心一定在轴对称线上"工作平台需要实现h$#k以上的角度"需要考虑两种情况'!!#在工作平台回转到极限位置时是否会与小臂上调平或固定铰链发生干涉&!(#达到最大作业高度工况时"小臂是否与下托架发生干涉$在不超过整车长度的"X"也就是(##99以内$当工作平台回转.#k时"考虑工作平台刚好与小臂安装铰链发生干涉"预留小臂与上托架安装尺寸为/#99"其工作平台到小臂中轴线的垂直距离为!(V99"具体如图!所示$当增加(##99的整车车长"未加回转机构前工作平台与小臂之间的距离为.#99$综上"小臂与工作平台的距离范围是!"#Y(.#99$图!%工作平台回转.#k位置当高空作业车达到最大作业高度时"小臂与地面垂直线形成一定的角度"需要防止小臂与下托架发生干涉$小臂安装铰链孔距离上托架底平面距离为!##99"设置小臂与水平面垂直线夹角为!#k"小臂距离回转体最小距离为!#99"如图(所示"计算回转中心与小臂之间的距离$图(%高空作业车最大作业高度工况时小臂位置情况%%根据以上情况"选择回转直径为(.#99"工作平与回转中心距离为!1V99"小臂与回转中心距离为!!#99$未添加回转机构前"小臂与工作平台的连接托架高"##99$不改变整车高度的情况下"回转机构的高度应不超过"##99$根据上述确定后的回转中心%上托架与小臂连接铰链孔后"确定回转机构%小臂%工作平台整体示意图"如图"所示$图"%回转整体示意图+$#!+重型机械%%%%%%%%%%%%%%%%%%(#(";.+"!+(%回转机构选择目前高空作业车工作平台回转主要有电动推杆推拉四连杆机构实现斗体回转&摆动缸实现斗体回转以及蜗轮蜗杆机构实现斗体回转$电动推杆推拉四连杆机构回转角度较小"并不能达到本文设计要求中h$#k以上的回转角度"同时此机构为四连杆机构"回转对连杆的强度%安装精度%加工工艺要求较高"由于自身结构限制"抗拉强度较差"不利于长时间使用$摆动缸具有非常大的扭矩"能够实现工作平台的回转"但制造要求较高"成本大"同时"摆动缸控制回转速度是非线性的"难以控制$蜗杆蜗轮机构可以有很大的传动比"能够获得较低的回转速度"其结构刚性好"强度大"能够承受较大的转动惯量"且具有自锁功能)$-!#*$回转机构目前有两种驱动方式'液压驱动和电力驱动$液压泵质量较大"设计管路较为复杂"成本较高"而电机相对液压泵质量较小"容易控制$综上所述"选择蜗轮蜗杆作为回转机构"电机作为动力源$回转支承是将轴承与蜗杆蜗轮结合的一种结构"广泛应用于高空作业车%吊塔%打桩机等机械行业$高空作业车转台是实现高空作业车作业系统的回转"转台支撑着吊臂安装着回转机构%起升机构"连接着回转支承)!!*$工作平台也可使用回转支承实现回转"其基本结构如图)所示$回转支承是两物体之间需作相对回转运动"又需同时承受轴向力%径向力%倾覆力矩的机械所必需的重要传动元件)!(*$高空作业车可利用回转装置在作业时实现工作平台h.#k回转$工作平台回转的工作原理'电力驱动减速机增大扭矩带动蜗杆旋转"进而带动涡轮旋转"回转支承外圈连接上托架"内圈连接下托架"上托架与小臂连接固定"下托架随着蜗杆蜗轮的运行进行旋转"实现工作平台的回转$即得'K j !)#+/(V <+9(查阅5U e &"$!!-(##$中表!/"可得.j !+.$(+!+(%摩擦阻力矩摩擦阻力矩的计算公式为)!"*Y D I 2!(*; $[Y A !1#$2/F C L :;.!4(1()&[()Y F C L :;1&;L :;1[)/I &A 7L 1!$#式中"Y A 为蜗轮蜗杆摩擦阻力矩&*为回转阻力系数"&/F C 为垂直载荷&/I 为回转支承所承受的总水平力&Y F C 为倾翻力矩&.为滚动体的压力角".j)V Z &1j ?I A 7L ;/F C)Y F C &)为滚动体形状及滚道刚度系数")j)+V $(+!+"%惯性阻力矩Y :j Y :C *Y :S!.#式中"Y :C 为载荷引起的惯性阻力矩&Y :S 为工作平台引起的惯性阻力矩$其他零部件产生的惯性阻力矩很小"忽略不计$!!#载荷引起的惯性阻力矩Y :C j >.+VV 1i ]A("9!!##!(#工作平台引起的惯性阻力矩Y :S j >.+VV 1i )W#("9!!!#式中"]为载荷重量&A 为工作幅度&W 为工作平台自重&#为工作平台重心到回转中心的水平距离$计算得出Y j"!#+)#/<+9$根据机械设计手册得出蜗杆头数-!j ("涡轮齿数-(j)#"接触疲劳强度与弯曲疲劳强度皆满足设计要求$(+(%小臂受力分析工作平台增加回转后对于每一节臂都会受到影响"但由于平台回转半径小"而下臂和上臂结构强度较大"仅通过分析小臂受力模型改变后"其应力应变情况来判断原结构设计是否可满足改变后的性能要求$通过材料力学计算小臂受力情况"其最大作业幅度工况受力分析情况如图V 所示"最大作业高度工况时小臂受力情况如图/所示$图V%最大作业幅度小臂位置受力情况图/%最大作业高度小臂位置受力情况"%回转装置设计根据第(+!节确定了蜗杆蜗轮的基本尺寸"选择了单轴回转装置为回转机构$蜗轮的旋转中心与工作平台距离为!1V 99"与小臂间的距离为!!#99"小臂的安装尺寸距离上托架平面!##99$"+!%上托架结构设计上托架的设计要点'!!#上托架的下平面始终与地面平行&!(#不能随工作平台一起回转&!"#满足设计强度&!)#设计长度不能超过设计要求&!V #不与其他零部件发生干涉$上托架底平面与地面保持平衡可利用平行四边形原理通过铰链连接实现"在上托架合理设计铰链位置$上托架是与小臂%回转机构连接的结构"上托架上方需要设计与小臂安装孔及调平铰链孔"下方需要设计与回转机构进行连接$根据设想其结构如图1所示$上方为工字形"中间加强筋可提高上托架的强度和刚性"防止两侧变形"可更好地将力均匀分布在小臂两方$图1%上托架三维模型+#!!+重型机械%%%%%%%%%%%%%%%%%%(#(";.+"上托架与单轴回转装置连接方式为螺钉连接"单轴回转装置外圈螺纹孔为^!#"对其进行校核"验证是否符合强度要求$拉应力'%!A?j)i!+"/&C(!j"+!)^W? /$+V1^W?!!(#切应力'%j /&C(#3))j)i/L&C(#j)i#+1)&i!#(j#+##.^W?!(##单个螺栓所受挤压应力'!S j/LC##9:;j#+1)!#i)#j#+##1^W?!(!#拉应力%切应力和挤压应力均小于许用应力"螺栓符合强度要求$)%有限元模型建立通过对上托架%下托架和单轴回转装置进行装配"得到如图.的回转装置三维模型$将其导入,;L N L软件中进行材料设置%网格划分和分析设置等$网格划分时选择四面体网格类型"设置关键零部件网格单元大小"获得的单元数量和节点数量分别为!"1.$//个和(#1)#/$个$回转平台的生产加工材料为b")V钢"材料的屈服强度为")V^W?$图!#%回转装置网格划分结果)+!%回转装置受力结果分析按照载荷处理后简化的受力情况施加约束和载荷进行受力分析$回转装置在载重距离回转中心最远处的受力情况下应力分布如图!!所示"其应力主要集中在下托架安装部位中部以及上托架梁与安装板处"其中上托架的梁与安装板连接处应力最大"其应力为!")+""^W ?$其等效弹性应变如图!(所示"其应变值为#+###/.99$图!!%回转装置应力分布情况图!(%回转装置应变分布情况回转装置上下托架均采用b")V 钢焊接而成"按照极限工况计算"安全系数取("则b ")V 钢的许用应力为!1V ^W ?"因此上下托架结构强度均满足静态要求"同时回转装置变形为#+###$99"变形可忽略不计"符合设计要求$)+(%小臂受力有限元分析小臂在运动过程中有两处危险工况'最大作业高度工况%最大作业幅度工况$增加回转装置后这两处工况受力发生变化"需要对其进行受力分析"判断结构强度是否满足要求$将小臂模型导入,;L N L 中进行静态分析"网格划分结果如图!"所示$图!"%小臂网格划分结果本作业高空作业车的小臂材料为优质合金钢b /.#"根据5U e &.)/V -(#!$5高空作业车6中第V+"+!节和第V+"+"节规定'!!#平台及伸展机构承载部件所用的塑性材料"按材料最低屈服极限计算﹐结构安全系数应不小于($!(#确定结构安全系数的设计应力"是作业车在额定载荷工况下作业"并遵守操作规程时"结构件内所产生的最大应力值$设计应力还应考虑到应力集中及动力载荷的影响"安全系数按式!((#计算'&j!!!!*!(#H !H (!((#式中"&为结构安全系数&!为塑性材料的屈服强度%非塑性材料的强度极限"^W ?&!!为由结构质量产生的应力"^W ?&!(为由额定载荷产生的应力"^W ?&H !为应力集中系数&H (为动力载荷系数$H !%H (的数值可通过对样机的试验应力分析确定$或取H ! !+!"H ( !+(V "本文取H !j !+!"H (j!+(V "&j ("即'!!!*!(&H !H (j (+1V !("#则b/.#的许用应力值)!*j (V!^W ?在第(节中对小臂受力进行了分析"在+(!!+重型机械%%%%%%%%%%%%%%%%%%(#(";.+",;L N L 中设置相关参数"最大作业高度工况下应力应变结果如图!)%图!V 所示$小臂最大变形为#+###(99"最大应力为)$+#.^W ?"均发生在油缸连接处$当高空作业车处于最大作业高度工况时"小臂上油缸铰链安装处%小臂与上臂铰链安装处均为固定端"工作平台%回转装置作用在小臂另一端"形成了悬臂梁结构"应力应变集中在油缸支承末端$图!)%最大作业高度小臂应变分布图!V%最大作业高度小臂应力分布最大作业幅度工况下应力应变结果如图!/%图!1所示$小臂最大变形为#+##!!99"最大应力为("1+#)^W ?"均发生在油缸连接处$当高空作业车处于最大作业幅度工况时"与最大作业高度产生应力应变的原因一样$图!/%最大作业幅度小臂应力分布图!1%最大作业幅度小臂应变分布小臂所选材料为b/.#"小臂在最大作业高度和最大作业幅度的应力均小于许用应力)!*j (V!^W ?"变形小于#+#!99"均满足设计要求$V%结束语本文对高空作业车增加了工作平台的回转装置"并对其关键部位上下托架进行了有限元分析"以验证上下托架结构强度的合理性$同时"增加回转后小臂受力发生变化"对变化后小臂进行有限元分析"判断小臂结构强度是否满足$结果表明"回转装置能够满足设计要求"小臂最大应力小于小臂许用应力$回转装置的设计使得折臂式高空作业车能在错综复杂的楼盘间%建筑等作业"例如图!$%图!.所示"减少反复调整位姿以达到作业要求的情况"从而极大地提高作业效率"节约车辆使用成本$图!$%无回转时工作平台在楼层间作业图!.%有回转时工作平台在楼层间作业参考文献)!*%涂桥安"王保平"王兆伍T 移动式高空作业平台的设计研究)J *T 机械设计与制造工程"(##!!#V #'!V -!1T )(*王昭君T ,)V 折臂式高空作业车稳定性及其主要影响因素分析)d*T 沈阳'东北大学"(#!.T )"*王昭君"何雪浤"周振东"等T 基于,d ,^@的折臂式高空作业车展开作业稳定性分析)J *T 机电工程"(#(#""1!#"#'(V.-(/""(1/T +"!!+(#(";.+"%%%%%%%%%%%%%%%%%%重型机械))*蒋红旗T折臂式高空作业车风振疲劳损伤破坏机理研究)d*T徐州'中国矿业大学"(#!1T)V*张丹T!/米折叠式高空作业车整机设计及分析)d*T成都'西南交通大学"(#!)T)/*夏林焱T高空作业车臂架优化设计及多体动力学分析)d*T长沙'中南林业科技大学"(#!$T)1*尹冬冬T高空作业车作业臂的结构设计与动态性能研究)d*T武汉'武汉理工大学"(#!$T)$*张承志"陈立停"张月"等T高空作业车工作斗新型回转机构改进设计及分析)E*e e科学决策的理论与方法学术研讨会"中国北京"(#!VT ).*湖南星邦智能装备股份有限公司T一种高空作业车及其平台回转控制装置'E<(#!.(!"$1(.#+))W*T(#(#-#$-($T)!#*高耀T一种新型的工作平台回转机构)J*T科技创业家"(#!)!#V#'..T)!!*戴军T回转支承的合理选用)J*T机电设备"(##/ !#V#'$V-$1T)!(*蒋红旗"刘玉T高空作业车转台有限元结构分析)J*T现代机械"(##$!#"#').-V#T)!"*洪宝峰T某直臂式随车起重运输车设计及分析研究)d*T长春'吉林大学"(#!/T+)!!+重型机械%%%%%%%%%%%%%%%%%%(#(";.+"。
车辆工程毕业设计14高空作业车改装设计
本科学生毕业设计高空作业车改装设计系部名称:汽车与交通工程学院专业班级:车辆工程学生姓名:指导教师:职称:讲师The Graduation Design for Bachelor's DegreeDesign of Modified OverheadWorking TruckCandidate:Yang FengmingSpecialty:Vehicle EngineeringClass:07-2Supervisor:Lecturer. Yang ZhaoHeilongjiang Institute of Technology摘要高空作业车是目前最常见的专用汽车之一。
由于高空作业车近几年的快速发展,高空作业行业出现了部分车型产量过剩苗头的同时,也存在着部分车型供不应求、生产能力不足的现象,因此,结构性过剩是当前汽车工业产能过剩的基本特点,也是当前汽车工业发展存在的主要问题。
高空作业车是汽车工业的一部分,它的发展中也会出现同样的问题,因此研究高空作业车的改装技术,不仅可以推动高空作业车行业的发展,而且对于推动专用汽车行业的发展,调整企业产品开发战略无疑具有重要意义。
在这次的设计工作中,我主要设计了一种折叠臂的高空作业车,主要以上、下臂,转台,液压部分为研究对象。
本设计主要设计的是作业高度为10米的高空作业车,在满足作业高度的前提下,对高空作业臂,转台,液压部分进行设计:首先根据使用要求选择作业臂材料的类型;其次根据最大作业高度确定上、下臂的长度;再经过受力分析利用强度来确定臂的截面尺寸及油缸的铰接位置;再进行强度、刚度、稳定性的校核,查看作业臂的尺寸是否符合要求;转台和液压部分同样原理也要进行计算与校核。
关键词:高空作业车;高空作业臂;转台;液压系统;改装设计ABSTRACTOperating vehicle height is the most common one of the special vehicle. In recent years ,because the aerial work vehicle the rapid development, aerial work industry appeared part models yield, but also excess symptom exist in demand, production capacity part models, therefore, the phenomenon of insufficient structural surplus is the auto industry excess capacity, but also the present the basic characteristics are the main developing automobile industry. Aloft work vehicle is part of the auto industry, and its development will also be the same problem, so the aloft work vehicle modified technique, not only can promote the development of the car industry aerial work, and to promote the development of specialized automobile industry, adjust enterprise product development strategy of great significance. In this design work, I design a folding arm of the high-altitude vehicles. Main above, upper and lower arm, turntable, hydraulic parts as the research object.This design main is the height of 10 meters aloft work vehicle, to meet the high operating on the premise that for aloft work arm,turntable,hydraulic parts design: First choice under the requirements of the use of operating arm of the types of materials; Second, based on the height of the largest operations to determine the upper and lower arm length; After Analysis to determine the intensity of use of the arm section size and fuel tanks articulated position; further strength, stiffness, Stability of Verification, check the operating arm size whether it meets the requirements; Turntable and hydraulic parts also principles want to calculate and checking.Key words: Aloft work vehicle;Aloft work arm;Turntable;Hydraulic system;Modification design目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 概述 (1)1.2 高空作业车的发展现状 (2)1.2.1 专用车的现状 (2)1.2.2 我国高空作业车的现状和发展 (2)1.3 高空作业车的组成 (5)1.3.1 工作装置 (5)1.3.2 金属结构 (5)1.3.3 控制系统 (5)1.3.4 动力传动装置 (5)1.4 本课题所研究的任务 (6)1.5 本课题研究的意义 (6)第2章确定设计方案 (8)2.1 总体设计要求 (8)2.2 动作要求 (8)2.3 技术性能要求 (8)2.4 总体设计方案 (8)2.5 确定执行元件的形式 (9)2.6 整体设计结构图 (9)2.7 本章小结 (9)第3章底盘的选择 (10)3.1 高空作业车底盘的类型 (10)3.2 底盘的选择 (10)3.3 本章小结 (11)第4章高空作业车臂的设计 (12)4.1 材料的选择 (12)4.2 计算上、下臂的长度 (12)4.3 确定液压缸铰点的位置 (13)4.3.1 确定上臂液压缸铰点的位置 (13)4.3.2 确定下臂液压缸铰点的位置 (13)4.4 上臂截面尺寸的确定 (14)4.4.1 对上臂进行受力分析 (14)4.4.2 计算上臂截面尺寸 (15)4.4.3 对上臂进行强度校核 (16)4.5 下臂截面尺寸的确定 (17)4.5.1 对下臂进行受力分析 (17)4.5.2 计算下臂的截面尺寸 (20)4.5.3 对下臂进行强度校核 (21)4.6 本章小结 (22)第5章高空作业车转台结构的设计 (22)5.1 高空作业车转台总体结构设计 (22)5.2 转台的受力分析 (28)5.2.1 转台的自重 (28)5.2.2 转台受到的其余的力 (30)5.3 回转支承装置的计算 (30)5.3.1 回转支承的计算载荷 (30)5.3.2 转盘式回转支承装置的计算 (31)5.3.3 按承载能力确定圆柱滚子数目 (31)5.4 传动齿轮的计算 (32)5.4.1 选择齿轮材料 (32)5.4.2 选择齿轮齿数和齿宽系数 (32)5.4.3 确定轮齿的许用应力 (33)5.4.4 齿面接触强度设计 (33)5.4.5 确定模数和齿宽 (33)5.4.6 验算齿根的弯曲强度 (34)5.4.7 传动齿轮的几何尺寸 (34)5.5 本章小结 (34)第6章液压系统的设计 (35)6.1 液压缸的设计计算 (35)6.1.1 液压缸的最大载荷 (35)6.1.2 确定系统工作压力 (38)6.1.3 液压缸内径计算 (38)6.1.4 液压缸缸筒壁厚和外径计算 (38)6.1.5 液压缸最大密封压强得计算和壁厚的校核 (39)6.1.6 液压缸活塞杆直径 (41)6.1.7 液压缸活塞缸强度校核 (41)6.1.8 液压缸活塞杆稳定性校核 (42)6.1.9 液压缸的选择 (43)6.2 液压马达的选取 (43)6.3 液压泵的选择 (43)6.4其他辅助元件的选择 (44)6.4.1 油箱 (44)6.4.2 联轴器 (44)6.4.3 各种液压阀 (45)6.5 本章小结 (45)第7章其余部分设计与选择 (46)7.1 副车架的选择与计算 (46)7.1.1副车架外形设计 (46)7.1.2 副车架选材 (46)7.1.3 副车架的校核 (46)7.2 销和螺栓的校核与计算 (49)7.3 钢丝绳的选择与计算 (50)7.3.1 钢丝绳的计算与校核 (50)7.3.2 钢丝绳接头的压制方法 (52)7.4 本章小结 (52)结论 (53)参考文献 (54)致谢 (55)附录 ............................................................................................................ 错误!未定义书签。
机械毕业设计-车载式高空作业平台的结构设计(含全套CAD图纸)

编号无锡太湖学院毕业设计(论文) 题目:车载式高空作业平台的结构设计信机 系机械工程及自动化 专业学 号:学生姓名:指导教师:2013年 5月 25日无锡太湖学院本科毕业设计(论文)诚 信 承 诺 书本人郑重声明:所呈交的毕业设计(论文) 车载式高空作 业平台的结构设计 是本人在导师的指导下独立进行研究所取 得的成果, 其内容除了在毕业设计 (论文) 中特别加以标注引用, 表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、 集体已发表或撰写的成果作品。
班 级: 机械93学 号: 0923104作者姓名:2013 年 5 月 25 日无锡太湖学院信 机 系 机械工程及自动化 专业毕 业 设 计论 文 任 务 书一、题目及专题:1、题目车载式高空作业平台的结构设计2、专题二、课题来源及选题依据高空作业平台是用来运送操作人员和工作设备到指定高度进行 作业的特种车辆。
随着城市化进程的加快,市政建设、城市电力、装 饰物等各种养护作业需要大量的高空作业装备。
高空作业平台作为一 种系列化的工程机械设备,还广泛应用于船舶、建筑、消防、港口货 运等行业。
近几年来,随着高空作业领域的不断扩展,对高空作业平 台的需求量也日益增加, 对高空作业平台的举升高度的要求也越来 越高。
因此,对高空作业平台的工作可靠性、平稳性、安全性等要求 也越来越高。
车载式高空作业平台是近年来应用比较广泛的高空作业平台, 它 由升降台和汽车配套改装而成的,采用 H 型液压支腿,能保证机器 了升降的稳定和作业的安全。
适用于工作面广和幅度大的高空作业, 产品具有作业范围大,持续作业时间长等优点,特别适合于野外路桥 检修、路灯检修等工作环境。
三、本设计(论文或其他)应达到的要求:① 了解高空作业平台的工作原理,以及近十年来的国内外研究发展状况;② 完成车载式高空作业平台的总体方案设计及零部件的设计;③ 完成有关零部件的选型计算、结构强度校核;④ 完成高空作业车的液压油缸的选型设计;⑤ 掌握用积分法对结构进行强度、刚度校核的能力;四、接受任务学生:机械 93 班 姓名张 璐五、开始及完成日期:自 2012 年 11 月 12日 至 2013年 5月 25 日六、设计(论文)指导(或顾问):指导教师 签名签名签名教研室主任〔 学科组组长〕 签名研究所所长系主任 签名2012 年 11月 12 日本课题首先对国内外高空作业车的发展进行了概括,提出了发展中的不足,简要介绍 了高空作业车的组成,然后对目前国内生产技术不完善的混合臂和伸缩臂式高空作业车的 关键结构进行了设计,同时对工作斗调平技术和液压系统等关键技术进行了研究分析。
折叠臂式高空作业车设计
第1章绪论1.1 前言随着世界经济的大繁荣,各个行业都起了翻天覆地的改变,尤其最近几十年以来,世界各国都改变了自己的面貌,无论是在外表还是在社会内层。
在这其间,社会的建设少不了各种机械,而在这些机械中,高空作业车的重要性不言而寓。
高空作业车之所以发挥着如此大的作用,跟其自身的特点是分不开的。
高空作业车其结构紧凑、传递平稳、操作轻便、举升高,易于实现自动化控制;同时还具有机动灵活、转移速度快的特点。
它特别适于从事消防、抢险救灾、施工、安装、维护等工作,广泛应用在电力、摄影、建筑、市政、机场、工厂、园林、住宅等场所。
因此,近年来高空作业车发展很迅速,一举成了市政及其他部门主要的高空作业机械。
我国高空作业车技术的研究与国外先进水平相比还有一定的差距,还具有很大的研究空间,我们应该加大力度的研究此方面以拉近我国与国外的差距;同时,通过此次毕业设计,我可以将自己以前所学运用到设计中来,锻炼自己的动手能力和运用知识的综合能力,对我各个方面的提高将会起到很大的作用,是一次锻炼自己的很好的机会。
1.2国内外研究状况1.2.1 国内现状部分企业技术创新能力较差:部分企业不重视产品的更新和新产品的开发,产品几十年一贯制,品种规格单一、市场经营范围窄,使企业产品产量逐年下降,企业效益差。
近几年,国外高空作业机械产品纷纷进入国内,如芬兰BRONTO公司、美国的JLG 、GENIN、UP-RIGHT, SNORKEI,SKYJACK等公司以及英国、意人利、丹麦的一些著名公司在国内都相继设立了办事机构,而且在大高度产品和特殊产品中仍然占有国内主要市场,如高空绝缘作业车、蜘蛛式大高度作业平台、自行式高空作业平台等。
这些进口产品性能好、外观美,价格与国内产品相差不多,具有很强的竞争力。
缺乏高空作业车的专用底盘:高空作业车是由汽车底盘改装而成的,属于工程车辆范畴,长期处于重载状态,行驶距离短、车速慢,使用频率不高。
为便于在各种街道行驶,要求体积小、轴距短,又因其重心高,要求底盘大梁低。
伸缩臂叉装车总体结构毕业设计

伸缩臂叉装车总体结构毕业设计伸缩臂叉装车总体结构设计摘要:伸缩臂叉装车已成为高空作业设备的重要门类,是广泛应用于建筑工地、工矿企业仓库和其他工地上起升、运输、堆放砖头、木材、钢材和其他物料的一种起重运输设备,随着经济建设的发展,对其需求越来越大,对其性能的要求也越来越高。
本文主要任务是完成对伸缩臂叉装车的总体计算、整体布局、臂架结构设计及其有限元分析。
本文主要内容:⑴介绍伸缩臂叉装车的用途、国内外伸缩臂叉装车发展状况的比较、及其发展前景。
同时对臂架的结构和工作原理做了简要介绍。
⑵完成对关键铰点的布置,作业高度、作业幅度的计算,及整机稳定性的校核计算。
并绘制出整机总体布局图。
⑶臂架的结构设计,臂架的强度、刚度和稳定性计算,并用ANSYS软件进行臂架有限元分析。
同时完成臂架系统装配图,一节臂、二节臂的装配图和相关零部件的工程图。
⑷设计过程采用Pro/E软件进行三维实体建模,并进行装配,最后应用其工程图模块转化为二维工程图。
本次设计的伸缩臂叉装车参考了JCB公司的JCB530型号伸缩臂叉装车的外形尺寸,并且严格按照《起重机金属结构》、《BS_EN_1459-1999》和《机械设计手册》等相关设计规范进行设计,其性能和质量满足相关要求。
关键词:伸缩臂叉装车;稳定性;臂架;有限元分析The Frame Structure Design of TelehandlerAbstract:Telehandler is a kind of hoisting equipment which is widely used in building site、storage and other place to lift、transport、stack the tile 、wood 、steel products and other materiel . Along with the development of economic in our country, the requirement of crawler crane is larger and larger, andthe request of the capability is higher and higher.the mission of this paper is to complete the frame structure design of telehandler、the design of boom structure and the finite analysis of boom.The primary contents in this paper can be concluded as follows:The use of the telehandler、the telehandler’s development comparison domestic with abroad、and the development trend of the telehandler are introduced.At the same time,the paper introduces the structure of boom and how boom works, and gives the principle of how to choose the boom.The pivot points arrangment , the calculation of lift height and forward reach, and the calculation of the stability are completed.The integral layout drawing is provided.The structure design of the boom, the calculation of the strength and stability of the boom system are accomplished and the finite analys of boom is achieved by ANSYS software. While at the same time planar engineering drawing must be done, such as the assembling of the boom system, the boom one the boom two and the related parts.I use the Pro-E software to design the 3D entity, and make dummy assembly. And then, the 3D entity is transformed to the planar engineering drawing with the Pro/E planar engineering drawing module.In the design process, I refer to the JCB530 telehandler of JCB, and accord to the《Crane Metal Stuctrure》、《BS_EN_1459-1999》and the《Machine Design Handbook》strictly. Its capability and quality meet the requirement.Key Words:Telehandler;Stability;Boom;The Finite element analysis目录摘要 .......................................................................................................................... .. (I)ABSTRACT ......................................................................................................... ....................................................... II 绪论 (1)1伸缩臂叉装车概述 (1)1.1 伸缩臂叉装车简介 (1)1.2 国外伸缩臂叉装车发展状况 (1)1.3 国内伸缩臂叉装车发展状况 (2)1.4 国内伸缩臂叉装车的前景及发展趋势 (2)1.5 国内、外相关标准 (3)第一章毕业设计任务书 (4)1题目来源:实际应用 (4)2设计要求和设计参数 (4)2.1设计要求: (4)2.2设计参数: (4)3个人重点工作 (5)4各阶段时间安排 (5)5应阅读的资料及主要参考文献目录 (5)第二章毕业设计计算说明书 (5)1设计参数及整机尺寸 (5)1.1 设计参数 (6)1.2 整机尺寸 (6)2重要铰点布置及其计算 (7)3作业高度H计算 (8)4幅度R计算 (9)5整机稳定性计算 (9)5.1 整体稳定性计算工况和载荷 (9)5.2 整体稳定性结果汇总 (11)6臂架结构设计及其计算 (12)6.1 臂架结构设计 (12)6.2 臂架理论计算 (12)6.2.1 臂架全伸,仰角62时刚度、强度计算 (13)6.2.2臂架全伸,仰角0度时刚度、强度、稳定性计算 (24)6.3 各臂节支反力计算 (26)6.3.1 对臂架整体受力分析 (26)6.3.2 伸臂时各臂节支反力计算 (27)6.3.3 缩臂时各臂节支反力及缩臂链拉力 (29)第三章:标准化审验报告 (30)1技术分析 (30)2结论 (30)参考文献 (32)致谢 (33)绪论1 伸缩臂叉装车概述1.1 伸缩臂叉装车简介在高空作业类小型机械中,主要有高空作业平台、伸缩臂叉装车等种类。
高空作业车的转台设计及分析正文

摘要本课题针对 GKZ 系列车型转台部分的要求工作装置,对GKZ型高空作业车回转机构进行设计及分析。
高空作业车由液压马达、回转减速器及回转小齿轮、回转支承等组成。
进行回转时,液压马达输出动力,通过回转减速器减速后带动输出轴上的小齿轮旋转,小齿轮与回转支承的齿圈啮合,由于回转支承的齿圈与车架刚性连接,因而回转减速器带动与之相连的转台回转。
本课题确定了高空作业车回转机构的传动方案,采用的单排四点接触球式回转支承,此类支承的主要优点是同时承受轴向、径向力和复合力矩。
适用子中小型起重机。
转台的结构设计采用的是倒π型结构,前后两个高强板,左右各一个支承板,再加两个加强筋形成。
对转台采用PRO/E进行建模,将建好的模型通过转化放入ANSYS中进行有限元分析,分析出变形最大和受应力最大的接触面,对分析的结果的提出改进方案,对改进后的方案进行有限元分析比较, 确定最佳方案。
本方案的设计为同类转台的结构设计提供了理论依据和分析方法。
(1)在结构设计过程中主要对转台的的受力在课题设计的过程中使用的方法有:情况进行分析,计算出转台的受力大小和转台的自重,对传动齿轮的设计及(2)将模型导入ANSYS中,对转台的强度校核,运用绘图软件PRO/E进行建模。
受力情况进行分析查看其分析的结果,确保转台的变形和所受的应力均能符合设计要求。
关键词:高空作业车;转台结构设计;ANSY第一章绪论1.1 引言工程机械广泛应用于经济建设的各部门,并且在整个经济发展中占有十分重要的地位。
解放以后,我国的机械工业在十分薄弱的基础上,经过近五十年的艰苦努力,从小到大,从修配到制造,从仅仅仿造一般机械产品到能制造大型、中型、精密设备,从制造单机到制造重大成套设备,逐步形成了一个门类比较齐全,具有较大规模,较先进技术水平和成套水平不断提高的工业体系。
80 年代以来,工程机械发展速度快。
其主要原因:一是我国在改革开放政策指引下,经济发展快,对工程机械的需要增多;二是从中央到地方给与发展的优惠政策,增加资金注入,加以扶植;三是引进国外多项先进技术,经过消化吸收,产品技术水平提高;四是,企业经过组织结构调整,相互合作,并在竞争中促使相互提高。
折叠式高空作业车臂架系统的动力学建模

系统建模方法作业折叠式高空作业车臂架系统的动力学建模课程名称:系统建模方法姓名:学号:专业班级:高空作业车是用来运送工作人员和使用器材到达指定现场进行高空作业的专用汽车。
高空作业车按伸展结构的类型可分为伸缩式、折叠式、混合式、垂直升降式等四个系列,其中折叠式高空作业车如图1所示。
图 1 折叠式高空作业车高空作业车的臂架系统是一个典型的柔性多体系统,如何对臂架实现自动控制,以期提高安全性、可靠性、舒适性,引起了国内外许多学者的重视。
目前,针对伸缩式高空作业车柔性变形对整个系统动态特性的影响开展了较多研究,但是,很少有文献论述折叠式高空作业车柔性臂架系统的研究或分析,此文将工作台固定在上臂末端,对折叠式高空作业车双节臂臂架系统进行动力学建模与仿真分析,但对于柔性变形对工作台的摆动缺少进一步的研究。
而在实际的工作工程中,臂架的变形及工作台摆动比较明显,为了抑制臂架及工作台的振荡,准确控制末端轨迹,这方面的研究是不容忽视的。
本文以双节臂折叠式高空作业车的臂架系统为研究对象,将臂杆模拟成柔性机械臂。
以柔性多体动力学的递推列式为基础,运用拉格朗日方程建立臂架的柔性多体动力学方程,并对其进行数值求解和动力学仿真分析。
1 臂架柔性多体动力学模型建立在臂架运动过程中,刚性运动与变形运动互相影响、强烈耦合,本文以弹性力学和结构力学为基础,采用拉格朗日方程和形函数法等推导臂架的柔性多体动力学方程。
藉此研究臂架柔性变形对臂架系统在竖直平面内运动的动态特性的影响,文中基于折叠式高空作业车的物理模型建立了臂架平面坐标系的示意图,如图2所示。
图 2 臂架平面坐标系示意图1.1 臂架系统动能的计算如图2所示,XOY 为臂架的惯性坐标系,k k k Z Y X )3,2,1( k k 为臂杆的动坐标系。
A k 为从动坐标系k k k Z Y X 到惯性坐标系XOY 的旋转变换矩阵,即⎥⎦⎤⎢⎣⎡-=k k k kk A θθθθcos sin sin cos (1) 式中k θ为动坐标系k X 轴与惯性坐标系X 轴的夹角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本设计主要以小型折臂式高空作业车上、下臂结构为研究对象,对上、下臂进行结构和该车上`的设计。
主要分两部分进行阐述,第一部分:根据高空作业车的最大高度10米,在满足作业高度的前提下,进行高空作业臂的结构设计:首先根据作业载荷使用要求选择作业臂材料类型;其次根据最大作业高度确定上、下长度;在经过受力分析利用强度来确定臂的截面尺寸,进而校核强度、刚度、稳定性,查看作业臂的尺寸是否符合要求。
对施加均布载荷和约束,进行结构的强度和刚度的分析,确定危险截面或危险点的应力分布及变形,最后画出作业臂的总装图。
第二部分:液压控制部分主要是指控制上下臂变幅运动的液压缸。
文中详细记录了高空作业机构上下臂液压缸的设计过程,在确定液压系统元件参数的基础上,完成了液压传动系统的设计计算。
关键词:折叠臂式高空作业车,折叠臂式液压系统设计,专用汽车,设计IABSTRACTIn this paper , to” high-altitude vehicles”,under the arm to study de structure of the upper and the lower arm to the vehicles structure and the design of the hydraulic system,mainly conducted in two parts on,high-aititude vehicles under one of the largest 10 meters high degree of operating,to meet the high degree of operating under the premise of a high-aititude operations arm of the structural design ,first,the use of operating arm asked to choose the type of material and secondly in accordance with the largest Operating highly determined ,under the arm length ;another use of force analysis to determine the strength of the arm section size and location of the fuel tank of the hinged ;further strength ,stiffness,the stability of checking to see whether the size of the operating arm to meet the requirements .to impose uniform loading and constraints ,structural strength and stiffness analysis, risk and danger point cross-section of the stress and deformation ,finally draw operating arm and hand ,arm parts under the plans .and hydraulic control of the mainly refers to control the movement from the top to bottom arm change hydraulic cyclinders .In a detailed record of the agencies operating at high altitude upper arm hydraulic cylinders and hydraulic cylinders under the arm of the design of process .In the determining the parameters of the hydraulic system components ,based on the completion of the hydraulic system desion and calculation.Key words: Folded-arm high-altitude vehicles Folding arm type hydraulic system design Special Vehicle DesignII目录摘要 (I)ABSTRACT (II)第1章绪论 (6)1.1课题的背景 (6)1.2小型折叠臂式高空作业车的发展概况 (7)1.3国内外折叠臂式高空作业车的发展概况 (7)1.4论文研究基本内容 (8)第2章折叠臂式高空作业车作业臂设计 (9)2.1高空作业臂选择 (9)2.1.1高空作业臂分析 (9)2.1.2作业臂作业状态主要技术参数 (9)2.1.3 作业臂材料选择 (10)2.2上下臂的计算与校核 (10)2.2.1计算上下臂的长度 (10)2.2.2 上臂截面尺寸的确定 (11)2.2.3 对上臂进行强度校核 (13)第3章折叠臂式高空作业车总体方案分析 (15)3.1动力传动装置设计与分析 (15)3.1.1设计要求 (15)3.1.2动力传动装置的选择 (15)3.2工作装置设计与分析 (16)3.2.1支腿机构 (16)3.2.2回转机构 (21)3.2.3操作及安全防护装置 (22)第4章回转机构设计计算 (24)4.1回转机构设计 (24)4.1.1确定圆柱滚子的最大载荷 (24)4.1.2确定圆柱滚子的允许载荷 (26)第5章液压系统设计计算 (27)5.1 确定液压缸类型和安装方式 (27)5.2 确定液压缸的主要性能参数和主要尺寸 (27)5.2.1液压缸内径D的计算 (27)5.2.2活塞杆直径d的计算 (29)5.2.3缸壁厚的计算 (29)5.2.4 缸体外径计算 (30)5.3液压泵的选型计算 (30)III5.3.1、液压泵理论流量Q r (30)5.3.2、油泵排量q (31)5.3.3 油箱容积计算 (31)5.3.4油管内径计算 (31)致谢 (33)参考文献 (34)附录1 中文翻译 .................................................................... 错误!未定义书签。
附录2 外文 ............................................................................ 错误!未定义书签。
IVV第1章绪论高空作业车是一种将作业人员、工具、材料等通过作业平台举升到空中指定位置进行各种安装的装置。
维修等作业的专用高空作业机械,既属于专用汽车,又属于工程机械,是一种重要的施工设备。
高安全性,高作业效率和高环境适应性,其特殊性在于:一是载人高空作业.其作业安全性要求比一般工程车辆高,即所谓“高安全性”;二是施工场所环境的“非结构性”,即其工作环境不可预知并且多变,因此要求对环境具有”高适应性”;三是其经常用于抢修作业,并且多为室外或野外作业,作业环境条件差,所以要求其具有作业的“高效率”。
“城市用”工程车辆特征目前我国用户基本集中在城市或城镇,其工作环境条件比一般的运输车辆和工程机械要好,对其使用寿命的期望也高.因此,要求具有与一般工程车辆不同的特征要求:多功能:外形美观.涂装色彩既要有工程车辆的稳重,又要有轿车的活力.并且要长期保持。
机动灵活:可适当装载货物,如作业用的工具、机具、材料等。
可乘载作业班组人员,如电力行业的4~6人、路灯行业的3~5人,具有工程车辆的功能和轿车的舒适性。
多功能:国外高空作业车一般只有高空作业功能,车辆看起来非常简捷,而我国用户则要求附加的辅助功能很多.主要有臂架起重、平台小吊,载人、载货等。
目前国内生产的高空作业车几乎全部是折叠臂式的,有很大的市场需求。
1.1课题的背景本题以“GKZ14高空作业车”为研究对象,对该车的作业臂结构,液压系统进行设计。
该型作业车的作业臂由上臂、下臂组成,下臂与底座铰接,上臂头部有工作平台。
上下臂通过伸缩油缸调节臂的举升高度。
传统力学方法设计是:根据高空作业车的需要,在满足举升高度的前提下,进行强度,刚度,稳定性的要求进行校核,确定截面尺寸,保证安全,设计过程中安全系数较大,造成制造成本增加,质量偏大等问题。
在车辆行驶过程中,犹豫臂重较大产生车架断裂现象。
由于伸缩臂在作业时位于十几米的高度,事关人身安全,因此,需要有一种较准确的设计计算方法。
液压系统设计在高空作业车的设计里占重要地位,例如,起重工种装置主要由变幅机构组成,这一机构靠液压系统驱动,实现作业要求。
液压系统元件可分为动力元件,控制元件,执行元件,辅助元件等。
随着经济技术的发展,国内外起重机市场和高空作业车市场对这两种产品的要求越来越大,将产生巨大的社会经济效6益。
本研究课题,将以高空作业车升降臂结构以及液压系统为对象,根据作业高度和液压驱动部分进行结构设计,得出一种较为准确的设计方法。
高空作业机械式在工程起重机械基础上发展起来的高空作业设备,广泛应用在建筑、消防等行业。
随着我国经济建设的不断发展,对高空作业车的需求越开越多,要求工作范围也越来越广泛。
1.2小型折叠臂式高空作业车的发展概况折叠臂式高空作业车采用的工作装置为液压驱动。
高空作业车的升降机构的稳定可靠是实现安全作业的必要条件之一,这类装置的升降机构大多采用臂式或剪式升降机构,采用液压缸作为液压驱动力,液压缸需要随升降机构运动,因此液压缸与液压主回路需使用液压胶管连接。
因此液压缸作为升降时的动力,又作为施工作业时的升降机构的支撑构件,因此液压缸及其连接管路对于整个系统安全起着非常重要的作用。
高空作业车是以反复循环的方式完成设备安装的作业车。
高空作业车主要由高空作业臂、工作平台、起升机构、动力系统、液压系统、电气系统等六部分组成1.3国内外折叠臂式高空作业车的发展概况国外折叠臂式高空作业机械新兴行业,是在工程起重机械基础上发展起来的高新技术产业系统,只有二十几年的历史。
目前,专业生产折叠臂式高空作业机械的公司比较少。
近年来,由于汽车起重机销售量下降及市场平淡,一批汽车起重机制造公司相继发展高空作业机械,但总计年产量仍不能满足市场需求,正处于发展时期。
国外折叠臂式高空作业机械发展迅速,技术水平不断提高。