电机转动程序
PMAC入门教程-让电机动起来

邮编: 100102
4.屏蔽报警
PMAC(中国)
பைடு நூலகம்
因为没有设置电机没有设置限位,所以关掉硬件位置限制,同时,如果你也不知道驱动 器是高报警还是低报警,可以把驱动器报警也关掉。这些通过 Ixx24 进行设置。如图 4.1
图 4.1 对于 PMAC2 型卡,我们可以让 Ixx24=$120001,关闭驱动器报警,关闭位置限制。对于 前面的例子就是在“Terminal”窗口键入“I124=$120001”回车。
调整好的曲线应该接近图 6.3
图 6.3
7.JOG
当 PID 调整完毕后,我们可以开始 JOG,让电机开始转动。在“Terminal”窗口键入“#1j+” 回车。如果要停止可以键入“#1j/”。如图 7.1
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 8 / 30
2、打开 PMAC Tuning Pro2
3、一般第一步是看系统的开环特性
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 10 / 30
邮编: 100102
PMAC(中国)
看开环特性是否正确:指令和反馈是否方向一致,
图 5.3 如果出现以下,如图 5.4 所示,说明电机编码器反馈设置不对,电机运动与指令方向完 全相反。此设置可以在 I7mn0 中调整,对于#1 号轴是 i7010。I7mn6 的设置如图 5.5,具体 可以参见软件手册。
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 6 / 30
伺服电机控制程序讲解

伺服电机控制程序讲解(原创版)目录1.伺服电机控制程序概述2.伺服电机控制程序的构成3.伺服电机控制程序的工作原理4.伺服电机控制程序的应用实例5.伺服电机控制程序的未来发展趋势正文【伺服电机控制程序概述】伺服电机是一种将电脉冲转换为角位移的电机,它可以通过控制脉冲的数量和频率来精确地控制旋转速度和位置。
伺服电机控制程序则是指用于控制伺服电机的计算机程序,通常由上位机或嵌入式系统执行。
本文将详细讲解伺服电机控制程序的原理和应用,并探讨其未来发展趋势。
【伺服电机控制程序的构成】一个典型的伺服电机控制程序主要包括以下几个部分:1.控制算法:根据给定的指令和实际反馈信号,计算出需要发送给伺服电机的脉冲数量和频率。
2.脉冲发生器:将控制算法计算出的脉冲数量和频率转换为实际的脉冲信号,以便驱动伺服电机。
3.通信接口:将脉冲信号发送给伺服电机的驱动器,并从驱动器接收反馈信号,如转速和位置等。
4.错误处理:对通信异常、电机故障等情况进行检测和处理,确保控制系统的稳定性和可靠性。
【伺服电机控制程序的工作原理】伺服电机控制程序的工作原理可以概括为以下几个步骤:1.接收指令:程序接收来自上位机或其他设备的指令,包括目标位置、速度等信息。
2.计算脉冲:根据指令和实时反馈信号,控制算法计算出需要发送给伺服电机的脉冲数量和频率。
3.发送脉冲:将计算出的脉冲数量和频率转换为实际的脉冲信号,并通过通信接口发送给伺服电机的驱动器。
4.反馈控制:根据伺服电机的实时反馈信号(如转速、位置等),对脉冲信号进行调整,以实现精确的控制。
5.错误处理:对通信异常、电机故障等情况进行检测和处理,确保控制系统的稳定性和可靠性。
【伺服电机控制程序的应用实例】伺服电机控制程序广泛应用于各种工业自动化设备和机器人系统中,如数控机床、自动化生产线、机器人手臂等。
例如,在数控机床中,伺服电机控制程序可以精确地控制刀具的移动速度和位置,实现高精度的加工。
电机正反转程序

电机正反转程序一、引言电机正反转是指电机在工作中可以根据需要改变转动方向的能力。
在实际应用中,电机正反转常常用于控制机械设备的运动方向,如电动车、机械臂等。
本文将介绍电机正反转的基本原理和编写相关程序的方法。
二、电机正反转原理电机正反转的原理是通过改变电机绕组的电流方向来实现。
当电流方向与磁场方向一致时,电机正转;当电流方向与磁场方向相反时,电机反转。
为了实现电机正反转,需要通过编写程序来控制电机驱动器的工作方式。
三、电机正反转程序编写1. 硬件准备需要准备好电机驱动器和控制器。
电机驱动器用于控制电机的转动方向和速度,控制器用于编写程序并与电机驱动器进行通信。
2. 程序设计编写电机正反转程序的关键是控制电机驱动器的输出信号。
常用的方法是使用PWM信号控制电机的转速,并通过控制电机驱动器的输入信号来实现正反转。
3. 正转程序电机正转程序的主要步骤如下:(1)初始化电机驱动器和控制器;(2)设置PWM信号的占空比,控制电机的转速;(3)使电机驱动器的输入信号为正转信号;(4)启动电机。
4. 反转程序电机反转程序与正转程序类似,只需将电机驱动器的输入信号改为反转信号即可。
5. 程序实现根据具体的控制器和电机驱动器型号,选择合适的编程语言和开发环境进行程序编写。
常用的语言有C、C++、Python等。
四、注意事项在编写电机正反转程序时,需要注意以下几点:1. 确保程序逻辑正确,避免出现死循环或逻辑错误;2. 对于不同的电机驱动器,可能需要设置不同的控制参数,需要仔细查阅对应的技术文档;3. 在实际应用中,需要根据具体情况进行调试和优化,确保电机正反转的准确性和稳定性。
五、总结电机正反转程序的编写是实现电机转向控制的关键。
通过控制电机驱动器的输入信号,可以实现电机的正反转。
在实际应用中,需要根据具体情况进行程序设计和调试,确保电机正反转的准确性和稳定性。
希望本文对读者理解电机正反转的原理和编写相关程序有所帮助。
步进电机程序代码
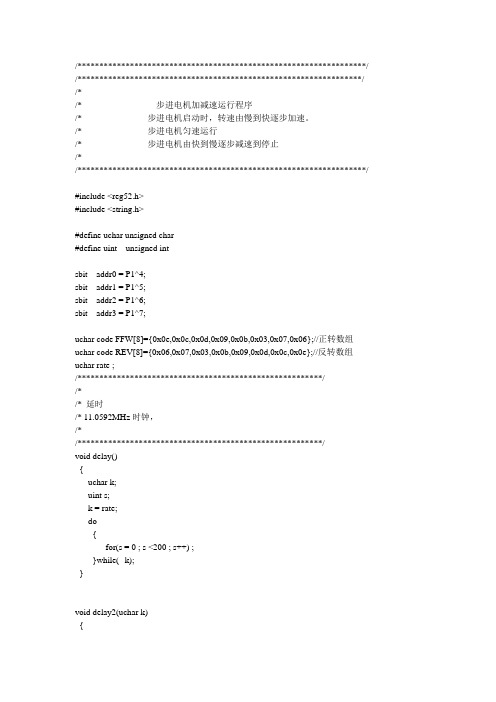
/******************************************************************/ /*****************************************************************/ /*/* 步进电机加减速运行程序/* 步进电机启动时,转速由慢到快逐步加速。
/* 步进电机匀速运行/* 步进电机由快到慢逐步减速到停止/*/******************************************************************/#include <reg52.h>#include <string.h>#define uchar unsigned char#define uint unsigned intsbit addr0 = P1^4;sbit addr1 = P1^5;sbit addr2 = P1^6;sbit addr3 = P1^7;uchar code FFW[8]={0x0e,0x0c,0x0d,0x09,0x0b,0x03,0x07,0x06};//正转数组uchar code REV[8]={0x06,0x07,0x03,0x0b,0x09,0x0d,0x0c,0x0e};//反转数组uchar rate ;/********************************************************//*/* 延时/* 11.0592MHz时钟,/*/********************************************************/void delay(){uchar k;uint s;k = rate;do{for(s = 0 ; s <200 ; s++) ;}while(--k);}void delay2(uchar k){uchar s;for(s = 0 ; s <k ; s++) ;}/********************************************************/ /*/*步进电机正转/*/********************************************************/ void motor_ffw(){uchar i;for (i=0; i<8; i++) //一个周期转30度{P0 = FFW[i];//取数据addr0 = 1;addr1 = 0;addr2 = 1;addr3 = 1;addr3 = 0;delay(); //调节转速}}/********************************************************/ /*/*步进电机反转/*/********************************************************/ void motor_rev(){uchar i;for (i=0; i<8; i++) //一个周期转30度{P0 = REV[i]; //取数据addr0 = 1;addr1 = 0;addr2 = 1;addr3 = 1;addr3 = 0;delay(); //调节转速}}/******************************************************** **步进电机运行**********************************************************/ void motor_turn(){uchar x;rate=0x30;x=0xf0;do{motor_ffw(); //正转加速rate--;}while(rate!=0x0a);do{motor_ffw(); //正转匀速x--;}while(x!=0x01);do{motor_ffw(); //正转减速rate++;}while(rate!=0x30);do{motor_rev(); //反转加速rate--;}while(rate!=0x0a);do{motor_rev(); //反转匀速x--;}while(x!=0x01);do{motor_rev(); //反转减速rate++;}while(rate!=0x30);}/******************************************************** ** 主程序**********************************************************/ main(){P1=0xf0;while(1){P0 = 0x00;//ULN2003输出高电平addr0 = 1;addr1 = 0;addr2 = 1;addr3 = 1;addr3 = 0;delay2(255);motor_turn();}}。
51单片机驱动步进电机的方法
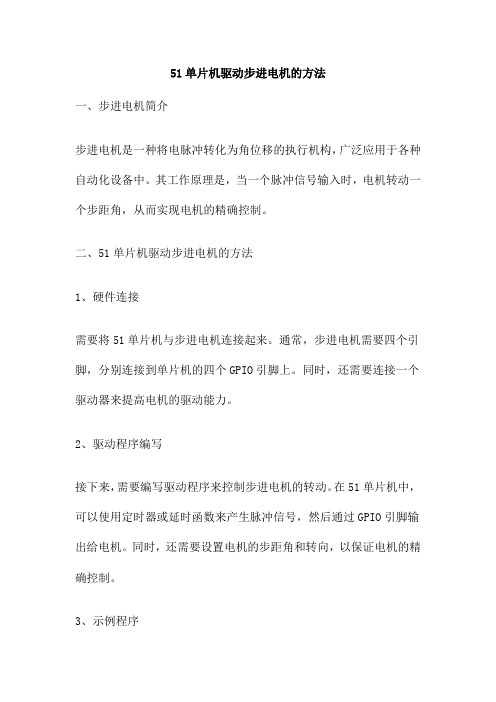
51单片机驱动步进电机的方法一、步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构,广泛应用于各种自动化设备中。
其工作原理是,当一个脉冲信号输入时,电机转动一个步距角,从而实现电机的精确控制。
二、51单片机驱动步进电机的方法1、硬件连接需要将51单片机与步进电机连接起来。
通常,步进电机需要四个引脚,分别连接到单片机的四个GPIO引脚上。
同时,还需要连接一个驱动器来提高电机的驱动能力。
2、驱动程序编写接下来,需要编写驱动程序来控制步进电机的转动。
在51单片机中,可以使用定时器或延时函数来产生脉冲信号,然后通过GPIO引脚输出给电机。
同时,还需要设置电机的步距角和转向,以保证电机的精确控制。
3、示例程序以下是一个简单的示例程序,用于演示如何使用51单片机驱动步进电机:cinclude <reg52.h> //包含51单片机的头文件sbit motorPin1=P1^0; //定义连接到P1.0引脚的电机引脚sbit motorPin2=P1^1; //定义连接到P1.1引脚的电机引脚sbit motorPin3=P1^2; //定义连接到P1.2引脚的电机引脚sbit motorPin4=P1^3; //定义连接到P1.3引脚的电机引脚void delay(unsigned int time) //延时函数unsigned int i,j;for(i=0;i<time;i++)for(j=0;j<1275;j++);void forward(unsigned int step) //正转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin1=1;motorPin3=1;motorPin2=0;motorPin4=0; //设置转向和步距角delay(step); //延时一段时间void backward(unsigned int step) //反转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin2=1;motorPin4=1;motorPin3=0;motorPin1=0; //设置转向和步距角delay(step); //延时一段时间void main() //主函数unsigned int step=1000; //设置步距角为1000微步forward(step); //正转一圈backward(step); //反转一圈while(1); //循环等待,保持电机转动状态在这个示例程序中,我们使用了四个GPIO引脚来控制步进电机的转动。
基于stm32控制的步进电机程序代码
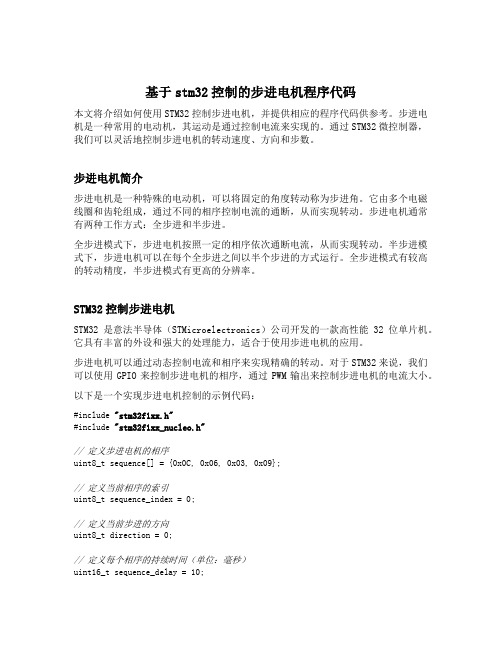
基于stm32控制的步进电机程序代码本文将介绍如何使用STM32控制步进电机,并提供相应的程序代码供参考。
步进电机是一种常用的电动机,其运动是通过控制电流来实现的。
通过STM32微控制器,我们可以灵活地控制步进电机的转动速度、方向和步数。
步进电机简介步进电机是一种特殊的电动机,可以将固定的角度转动称为步进角。
它由多个电磁线圈和齿轮组成,通过不同的相序控制电流的通断,从而实现转动。
步进电机通常有两种工作方式:全步进和半步进。
全步进模式下,步进电机按照一定的相序依次通断电流,从而实现转动。
半步进模式下,步进电机可以在每个全步进之间以半个步进的方式运行。
全步进模式有较高的转动精度,半步进模式有更高的分辨率。
STM32控制步进电机STM32是意法半导体(STMicroelectronics)公司开发的一款高性能32位单片机。
它具有丰富的外设和强大的处理能力,适合于使用步进电机的应用。
步进电机可以通过动态控制电流和相序来实现精确的转动。
对于STM32来说,我们可以使用GPIO来控制步进电机的相序,通过PWM输出来控制步进电机的电流大小。
以下是一个实现步进电机控制的示例代码:#include "stm32f1xx.h"#include "stm32f1xx_nucleo.h"// 定义步进电机的相序uint8_t sequence[] = {0x0C, 0x06, 0x03, 0x09};// 定义当前相序的索引uint8_t sequence_index = 0;// 定义当前步进的方向uint8_t direction = 0;// 定义每个相序的持续时间(单位:毫秒)uint16_t sequence_delay = 10;// 初始化GPIO和PWMvoid init_GPIO_PWM() {// 初始化GPIO口GPIO_InitTypeDef GPIO_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);// 初始化PWMRCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Period = 999;TIM_TimeBaseInitStruct.TIM_Prescaler = 0;TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStruct);TIM_OCInitTypeDef TIM_OCInitStruct;TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStruct.TIM_Pulse = 500;TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC1Init(TIM1, &TIM_OCInitStruct);TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);TIM_Cmd(TIM1, ENABLE);}// 控制步进电机的转动void step_motor_control() {// 设置当前相序GPIO_Write(GPIOA, sequence[sequence_index]);// 切换方向if (direction == 0) {sequence_index++;if (sequence_index >= 4) {sequence_index = 0;}} else {sequence_index--;if (sequence_index < 0) {sequence_index = 3;}}// 延时一段时间HAL_Delay(sequence_delay);}int main(void) {// 初始化GPIO和PWMinit_GPIO_PWM();while (1) {// 控制步进电机的转动step_motor_control();}}以上示例代码通过包含STM32 HAL库(HAL库是ST公司提供的一套可移植的硬件抽象层)来实现GPIO和PWM的初始化。
单片机控制l298n让电机旋转的程序

单片机控制l298n让电机旋转的程序【深度探讨:单片机控制L298N让电机旋转的程序】一、前言在现代科技高度发达的今天,单片机作为一种微型电脑,广泛应用于各种领域。
而L298N作为电机驱动芯片,也在电机控制领域扮演着重要角色。
本文将深入探讨单片机控制L298N让电机旋转的程序,希望能够帮助读者更好地理解并应用这一领域的知识。
二、程序设计思路在进行单片机控制L298N让电机旋转的程序设计时,首先需要明确控制的电机种类和控制信号的参数。
通过单片机的I/O口与L298N进行连接,并将控制信号送入L298N芯片,以实现对电机的控制。
在具体的程序设计中,可以采用PWM调速的方式来控制电机的转速,同时可以根据需要改变方向,以控制电机的正反转。
三、程序设计实例下面给出一个单片机控制L298N让电机旋转的简单实例,以便更好地理解程序的设计:```c//定义引脚#define ENA 3#define IN1 4#define IN2 5//初始化void setup() {pinMode(ENA, OUTPUT);pinMode(IN1, OUTPUT);pinMode(IN2, OUTPUT);}//控制电机正转void loop() {digitalWrite(IN1, HIGH);digitalWrite(IN2, LOW);analogWrite(ENA, 200);}```在上面的程序中,首先定义了ENA、IN1和IN2三个引脚,分别用于接收PWM调速信号和控制电机正反转的信号。
然后在setup函数中对引脚进行了初始化,以确保电机正常工作。
在loop函数中,通过digitalWrite函数将电机控制引脚设置为正转状态,并通过analogWrite函数向ENA引脚发送PWM调速信号,从而控制电机的转速。
同样的方法也可以实现电机的反转和调速功能。
四、个人观点和总结通过对单片机控制L298N让电机旋转的程序进行深入探讨,我们可以更好地理解程序设计的思路和实现方法。
电机正反转简单程序

电机正反转简单程序电机正反转是一个非常重要的控制技术,在很多领域都得到广泛应用。
下面我来分享一下电机正反转的简单程序。
首先,我们需要确定你使用的是什么类型的电机。
如果是直流电机,就可以采用下面这个程序:void setup() {pinMode(9, OUTPUT); //引脚9连接电机}void loop() {digitalWrite(9, HIGH); //正转delay(5000); //持续5秒digitalWrite(9, LOW); //停止delay(1000); //等待1秒digitalWrite(9, LOW); //反转delay(5000); //持续5秒digitalWrite(9, LOW); //停止delay(1000); //等待1秒}如果是交流电机,就需要使用一个电机驱动模块,如L298N模块。
下面是一个交流电机正反转的简单程序:void setup() {pinMode(9, OUTPUT); //IN1pinMode(10, OUTPUT); //IN2pinMode(11, OUTPUT); //使能引脚}void loop() {digitalWrite(11, HIGH); //使能digitalWrite(9, HIGH); //正转digitalWrite(10, LOW); //正转delay(5000); //持续5秒digitalWrite(9, LOW); //停止digitalWrite(10, LOW); //停止delay(1000); //等待1秒digitalWrite(9, LOW); //反转digitalWrite(10, HIGH); //反转delay(5000); //持续5秒digitalWrite(9, LOW); //停止digitalWrite(10, LOW); //停止delay(1000); //等待1秒}以上程序只是给出了一个简单的示例,实际应用中还需要根据电机的特定要求来进行修改。
步进电机调速程序
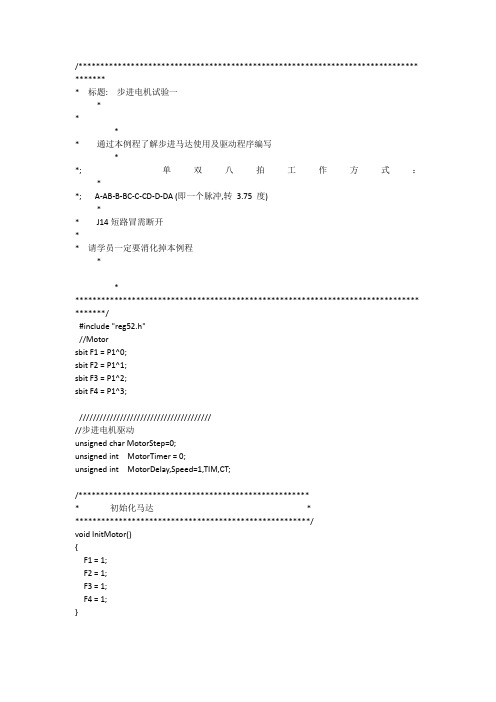
/****************************************************************************** ******** 标题: 步进电机试验一**** 通过本例程了解步进马达使用及驱动程序编写**; 单双八拍工作方式:**; A-AB-B-BC-C-CD-D-DA (即一个脉冲,转3.75 度)** J14短路冒需断开** 请学员一定要消化掉本例程********************************************************************************* *******/#include "reg52.h"//Motorsbit F1 = P1^0;sbit F2 = P1^1;sbit F3 = P1^2;sbit F4 = P1^3;/////////////////////////////////////////步进电机驱动unsigned char MotorStep=0;unsigned int MotorTimer = 0;unsigned int MotorDelay,Speed=1,TIM,CT;/****************************************************** 初始化马达*******************************************************/void InitMotor(){F1 = 1;F2 = 1;F3 = 1;F4 = 1;}void SetMotor(){// if(Speed == 0) return;MotorDelay=Speed;switch(MotorStep){case 0:if(TIM) // A{F1 = 0; //0xf1F2 = 1;F3 = 1;F4 = 1;MotorStep = 1;TIM=0;}break;case 1: // ABif(TIM){F1 = 0; //0xf3F2 = 0;F3 = 1;F4 = 1;MotorStep = 2;TIM=0;}break;case 2: //Bif(TIM){F1 = 1;F2 = 0; //0xf2F3 = 1;F4 = 1;MotorStep = 3;TIM=0;}break;case 3: //BCif(TIM){F1 = 1;F2 = 0; //0xf6F3 = 0;F4 = 1;MotorStep = 4;TIM=0;}break;case 4: //Cif(TIM){F1 = 1;F2 = 1; //0xf4F3 = 0;F4 = 1;MotorStep = 5;TIM=0;}break;case 5: //CDif(TIM){F1 = 1;F2 = 1; //0xfcF3 = 0;F4 = 0;MotorStep = 6;TIM=0;}break;case 6: //Dif(TIM){F1 = 1;F2 = 1; //0xf8F3 = 1;F4 = 0;MotorStep = 7;TIM=0;}break;case 7: //DAif(TIM){F1 = 0;F2 = 1; //0xf9F3 = 1;F4 = 0;MotorStep = 0;TIM=0;}break;}}void system_Ini(){TMOD|= 0x11;TH0=0xDC; //11.0592MTL0=0x00;IE = 0x8A;TR0 = 1;}main(){ system_Ini();InitMotor();while(1){SetMotor();}}/************************************************* ** 定时中断延时*************************************************/void Tzd(void) interrupt 1{TH0 = 0xfe; //11.0592TL0 = 0x33;if( CT++==10){TIM=1;CT=0;}}/****************************************************************************** ******** 标题: 步进电机试验二**** 通过本例程了解步进马达使用及驱动程序编写**; 单双八拍工作方式:**; A-AB-B-BC-C-CD-D-DA (即一个脉冲,转3.75 度)** J14短路冒需断开** 请学员一定要消化掉本例程*****************************************************************************************/#include "reg52.h"unsigned char code FFW[8]={0xfe,0xfc,0xfd,0xf9,0xfb,0xf3,0xf7,0xf6}; void delay(unsigned int t);//Motorsbit F1 = P1^0;sbit F2 = P1^1;sbit F3 = P1^2;sbit F4 = P1^3;/////////////////////////////////////////步进电机驱动void motor_ffw(){unsigned char i;for (i=0; i<8; i++) //一个周期转30度{P1 = FFW[i]&0x1f; //取数据delay(5); //调节转速}}void delay(unsigned int t){unsigned int k;while(t--){for(k=0; k<60; k++){ }}}main(){while(1){motor_ffw();}}/****************************************************************************** ******** 标题: 步进电机试验三(加减速运行)**** 通过本例程了解步进马达使用及驱动程序编写**; 单双八拍工作方式:**; A-AB-B-BC-C-CD-D-DA (即一个脉冲,转3.75 度)**** 请学员一定要消化掉本例程******************************************************************************** *******/#include "reg52.h"void delay();//Motorsbit F1 = P1^0;sbit F2 = P1^1;sbit F3 = P1^2;sbit F4 = P1^3;unsigned char code FFW[8]={0xfe,0xfc,0xfd,0xf9,0xfb,0xf3,0xf7,0xf6}; //反转unsigned char code FFZ[8]={0xf6,0xf7,0xf3,0xfb,0xf9,0xfd,0xfc,0xfe}; //正转unsigned int K, rate;/********************************************************** * * * 步进电机驱动* ***********************************************************/ void motor_ffw(){unsigned char i;for (i=0; i<8; i++) //一个周期转30度{P1 = FFW[i]&0x1f; //取数据delay(); //调节转速}}/********************************************延时程序*********************************************/void delay(){unsigned int k,t;t=rate;while(t--){for(k=0; k<150; k++){ }}}/**********************************************************步进电机运行**********************************************************/ void motor_turn(){unsigned char x;rate=0x0a;x=0x40;do{motor_ffw(); //加速rate--;}while(rate!=0x01);do{motor_ffw(); //匀速x--;}while(x!=0x01);do{motor_ffw(); //减速rate++;}while(rate!=0x0a);}main(){while(1){motor_turn();}}/****************************************************************************** ********* 标题: 步进电机试验四**** 通过本例程了解步进马达使用及驱动程序编写** 双四拍工作方式:** AB-BC-CD-DA (即一个脉冲,转7.5 度)**** 请学员一定要消化掉本例程,********************************************************************************* *******/#include "reg52.h"//Motorsbit F1 = P1^0;sbit F2 = P1^1;sbit F3 = P1^2;sbit F4 = P1^3;/////////////////////////////////////////步进电机驱动unsigned char MotorStep=0;unsigned int MotorTimer = 0;unsigned int TIM,CT;void InitMotor(){F1 = 1;F2 = 1;F3 = 1;F4 = 1;}void SetMotor(){// if(Speed == 0) return;switch(MotorStep){case 0:if(TIM){F1 = 0;F2 = 0;F3 = 1;F4 = 1;MotorStep = 1;TIM=0;}break;case 1:if(TIM){F1 = 1;F2 = 0;F3 = 0;F4 = 1;MotorStep = 2;TIM=0;}break;case 2:if(TIM){F1 = 1;F2 = 1;F3 = 0;F4 = 0;MotorStep = 3;TIM=0;}break;case 3:if(TIM){F1 = 0;F2 = 1;F3 = 1;F4 = 0;MotorStep = 0;TIM=0;}break;}}void system_Ini(){TMOD|= 0x11;TH0=0xDC; //11.0592MTL0=0x00;IE = 0x8A;TR0 = 1;}main(){ system_Ini();InitMotor();while(1){SetMotor();}}/************************************* [ t1 (0.5ms)中断] 中断中做PWM 输出------------1000/(0.02ms*250)=200Hz*************************************/ void Tzd(void) interrupt 1{TH0 = 0xfe; //11.0592TL0 = 0x33;if( CT++==20){TIM=1;CT=0;}}/****************************************************************************** ****** 标题: 步进电机试验五(正转一圈反转一圈)**** 通过本例程了解步进马达使用及驱动程序编写**; 单双八拍工作方式:**; A-AB-B-BC-C-CD-D-DA (即一个脉冲,转3.75 度)**** 请学员一定要消化掉本例程********************************************************************************* *******/#include "reg52.h"void delay(unsigned int t);//Motorsbit F1 = P1^0;sbit F2 = P1^1;sbit F3 = P1^2;sbit F4 = P1^3;unsigned char code FFW[8]={0xfe,0xfc,0xfd,0xf9,0xfb,0xf3,0xf7,0xf6}; //反转unsigned char code FFZ[8]={0xf6,0xf7,0xf3,0xfb,0xf9,0xfd,0xfc,0xfe}; //正转unsigned int K;/*********************************************************************** ** 步进电机驱动** * ***********************************************************************/ void motor_ffw(){unsigned char i;unsigned int j;for (j=0; j<12; j++) //转1*n圈{for (i=0; i<8; i++) //一个周期转30度{if(K==1) P1 = FFW[i]&0x1f; //取数据if(K==2) P1 = FFZ[i]&0x1f;delay(5); //调节转速}}}/******************************************************** 延时程序*********************************************************/void delay(unsigned int t){unsigned int k;while(t--){for(k=0; k<80; k++){ }}}main(){while(1){K=1;motor_ffw();K=2;motor_ffw();} }。
28BYJ_48步进电机资料和调速程序

步电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机28BYJ48型四相八拍电机,电压为DC5V—DC12V。
当对步进电机施加一系列连续不断的控制脉冲时,它可以连续不断地转动。
每一个脉冲信号对应步进电机的某一相或两相绕组的通电状态改变一次,也就对应转子转过一定的角度(一个步距角)。
当通电状态的改变完成一个循环时,转子转过一个齿距。
四相步进电机可以在不同的通电方式下运行,常见的通电方式有单(单相绕组通电)四拍(A-B-C-D-A。
),双(双相绕组通电)四拍(AB-BC-CD-DA-AB-。
),八拍(A-AB-B-BC-C-CD-D-DA-A。
)左——右 CCW旋转方向(轴伸端视)步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。
这种步进电机的应用最为广泛。
红线接电源5V,橙色电线接P1.3口,黄色电线接P1.2口,粉色电线接P1.1口,蓝色接P1.0口。
由于单片机接口信号不够大需要通过ULN2003放大再连接到相应的电机接口,如下:步进电机驱动速度计算公式:运转速度=脉冲频率×60/步进电机分割数/减速比64步进电机分割数=360/6.625调速程序:#include<reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int#define st_mo P1sbit k1=P2^0;//正转键sbit k2=P2^1;//反转键sbit k3=P2^2;//停止按键sbit k4=P2^3;//加按键sbit k5=P2^4;//减按键sbit dula=P2^5;//定义段码位sbit wela=P2^6;//定位段码位sbit alarm=P2^7;//定义蜂鸣器位uchar ccw[]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //反转uchar cw[]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; //正传uchar code ducode[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//定义段码uchar code wecode[]={0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe};//定位段码uchar tempdata[8],speed=10;void delay(uchar z) //延时1ms{uchar i,j;for(i=z;i>0;i--)for(j=110;j>0;j--);}void delay500us(void) //延时500us{int i;for(i=0;i<58;i++);}void buzzer() //产生报警音{uchar t;for(t=0;t<100;t++){delay500us();alarm=!alarm; //产生脉冲}alarm=1; //关闭蜂鸣器}void ccw_motor()//反转子程序{uchar i;for(i=0;i<8;i++)//旋转一周内部旋转一周{for(i=0;i<8;i++){st_mo=ccw[i];delay(speed);}}}void cw_motor()//正转子程序{uchar i;for(i=0;i<8;i++)//旋转一周内部旋转一周{for(i=0;i<8;i++){st_mo=cw[i];delay(speed);}}}void diaplay(uchar first,uchar num) //LED 显示函数{static uchar i;P0=0xff;wela=1;wela=0;P0=wecode[i+first];wela=1;wela=0;P0=tempdata[i];dula=1;dula=0;i++;if(i==num){i=0;}}void init()/定时器1、2初始化函数{TMOD|=0X11;TH0=(65536-2000)/256;TL0=(65536-2000)%256;TH1=(65536-1000)/256;TL1=(65536-1000)%256;EA=1;ET0=1;ET1=1;TR0=1;TR1=1;PT0=1; //边沿触发如不设置 LED显示时会跳动}void main(){uchar num;init();while(1){if(k1==0){buzzer();for(num=0;num<512;num++){if(k3==0){buzzer();break;}cw_motor();}}if(k2==0){buzzer();for(num=0;num<64;num++){if(k3==0){buzzer();break;}ccw_motor();}}st_mo=0;}}void timer0() interrupt 1//定时器1 {TH0=(65536-2000)/256; //延时2msTL0=(65536-2000)%256;tempdata[0]=ducode[speed%10];tempdata[1]=ducode[speed/10];diaplay(0,2);}void timer1() interrupt 3//定时器2 {TH1=(65536-1000)/256; //延时1msTL1=(65536-1000)%256;if(k4==0){delay(5);if(k4==0)speed++;}while(k4==0);if(k5==0){delay(5);if(k5==0){if(speed>2)speed--;}}while(k5==0);}效果图。
PMAC入门教程-让电机动起来
下面举一些 PID 调整的例子
图 6.1
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 7 / 30
邮编: 100102
PMAC(中国)
图 6.2 如图 6.2,第一种超调,应当减小 Kp,增加 Kd;第二种相应延迟,可能是阻尼太大,或 者比例增益太小,增加 Kp 或者减小 Kd;第三种,位置偏移,增加 Ki 和 Kp;第四种,机 械或者驱动器的限制,可以尝试增加 Kp。
2、打开 PMAC Tuning Pro2
3、一般第一步是看系统的开环特性
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 10 / 30
邮编: 100102
PMAC(中国)
看开环特性是否正确:指令和反馈是否方向一致,
邮编: 100102
2.设置电机输出指令
PMAC(中国)
对于普通带有驱动的电机,电机控制指令一般分为两种,模拟指令与脉冲加方向指令。 例如安川∑-Ⅴ系列伺服驱动,当驱动设定在“速度控制(模拟量电压指令时)”电机的 转速与转向,取决于模拟量的电压及电压方向,如图 2.2,同时请注意接线,分为差分 信号与单极性型号两种,接线有区别。∑-Ⅴ系列驱动器接线式单极性信号。
图 5.3 如果出现以下,如图 5.4 所示,说明电机编码器反馈设置不对,电机运动与指令方向完 全相反。此设置可以在 I7mn0 中调整,对于#1 号轴是 i7010。I7mn6 的设置如图 5.5,具体 可以参见软件手册。
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 6 / 30
程序(51控制步进电机,执行不同角度的转动)

void counter0(void) interrupt 0 using 1
{
EX0=0;
cont++;
EX0=1;
}
/*******************************************************************************
*实验名:步进电机角度控制
*实验说明:通过不同的按键控制步进电机角度分别是5度10度30度45度
*注意:
************************************************************************r*******/
#include <reg52.h>
/*******************************************************************************
*游承RGC
*
--------------------------------------------------------------------------------
//--定义一个全局变量--//
unsigned char cont=0;
unsigned int timer1=0;
void Delay10ms(unsigned int c); //延时10ms
void Time1Config();
/*******************************************************************************
单片机驱动直流电机正反转程序

(1)主程序main.c#include<reg51.h>#include"ds1302.h"sbit Xianwei1=P1^0;sbit Xianwei2=P1^1;sbitMotor_A=P1^2;sbitMotor_B=P1^3;sbitMotor_EN=P1^4;unsigned char Num=0;unsigned intdisp[8]={0x3f,0x3f,0x3f,0x3f,0x3f,0x3f,0x3f,0x3f};/*//---存储顺序是秒分时日月周年,存储格式是用BCD码---//uchar TIME[7] = {0, 0, 0x12, 0x01, 0x01, 0x02, 0x13};*/void main(){uchar state=0;Motor_A=1;Motor_B=1;Motor_EN=0;Ds1302Init();while(1){Ds1302ReadTime();if((TIME[2]==0x06)&&(TIME[1])==0) //06:00{state++;if(state>2)state=1;}if(state==1){while(Xianwei1!=0){Motor_A=1; //正转Motor_B=0;Motor_EN=1;}}if(state==2){while(Xianwei2!=0){Motor_A=0; //反转Motor_B=1;Motor_EN=1;}}}}(2)ds1302.h#ifndef __DS1302_H_#define __DS1302_H_//---包含头文件---//#include<reg51.h>#include<intrins.h>//---重定义关键词---//#ifndefuchar#define uchar unsigned char#endif#ifndefuint#define uint unsigned int#endif//---定义ds1302使用的IO口---//sbit DSIO=P3^4;sbit RST=P3^5;sbit SCLK=P3^6;//---定义全局函数---//void Ds1302Write(ucharaddr, uchardat); uchar Ds1302Read(ucharaddr);void Ds1302Init();void Ds1302ReadTime();//---加入全局变量--//extern uchar TIME[7]; //加入全局变量(3)ds1302.c#include"ds1302.h"//---DS1302写入和读取时分秒的地址命令---////---秒分时日月周年最低位读写位;-------//uchar code READ_RTC_ADDR[7] = {0x81, 0x83, 0x85, 0x87, 0x89, 0x8b, 0x8d}; uchar code WRITE_RTC_ADDR[7] = {0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};//---DS1302时钟初始化2013年1月1日星期二12点00分00秒。
s7-200控制步进电机正转和反转程序

块:主程序作者:创建时间:2014.07.20 10:45:11 修改时间:2014.08.27 14:23:42符号变量类型数据类型注释 TEMP TEMP TEMPTEMP程序注释步进电机正转和反转控制程序网络 1正转(清零) 脉冲周期1msR MOV_WENOENOUT IN SM0.0脉冲口:Q0.012SMW68符号地址注释脉冲口Q0.0网络 2从Q0.0口发脉冲PMOV_BENOENOUT IN MOV_DW ENOENOUT IN PLSENOENQ0.X正转:I0.016#8D SMB67+400SMD720符号地址注释正转I0.0R 正转:I0.0方向:Q0.11符号地址注释方向Q0.1ON时反转,OFF时正转正转I0.0网络 4PMOV_BENOENOUT IN MOV_DW ENOENOUT IN PLSENOENQ0.X反转:I0.116#8D SMB67+400SMD720符号地址注释反转I0.1网络 5S 反转:I0.1方向:Q0.11符号地址注释反转I0.1方向Q0.1ON时反转,OFF时正转PMOV_BENO ENOUT INMOV_DWENO ENOUT INPLSENO ENQ0.X停止:I0.216#0SMB670SMD72符号地址注释停止I0.2创建时间:2014.07.20 10:45:11修改时间:2014.07.20 10:45:11符号变量类型数据类型注释EN IN BOOLININ_OUTOUTTEMP子程序注释网络标题网络 1网络注释创建时间:2014.07.20 10:45:11修改时间:2014.07.20 10:45:11符号变量类型数据类型注释TEMPTEMPTEMPTEMP中断程序注释网络 1网络标题网络注释。
步进电机_正反转

-----自动正反转
1、控制要求:
设置初始正转转速为10r/min,反转转速为15r/min,要求按下启动按钮后,步进电机正转4圈后,停5s,再反转6圈,再停5s再正转4圈,如此循环。并且可以随时可以通过触摸屏改变步进电机的转速和旋转圈数。
2、PLC I/O分配表:
I/O地址
外部设备
在控制系统中的作用
Y0
步进驱动器CP-
脉冲输出
Y2
步进驱动器CW-
转向控制
X1
SB1
启动按钮
3、PLC外部接线:
4、PLC内部程序:
5、注意事项:
算术运算指令MUL、DIV运算后的结果占32位。脉冲输出指令PLSY在程序中只能出现一次,因此要将M10和M100并联输出。
Y2是用来控制步进电机转动方向,当Y2得电时,步进电机反转,失电时,步进电机正转。
步进电机驱动程序C语言
/*************************************************************************************** ;步进电机驱动程序;步进电机型号:70BC340-D ,步距角1.5/3***************************************************************************************** ****/#include <A T892051.H>#define uchar unsigned char#define uint unsigned int#define ulong unsigned longsbit dj_a = P1^0;sbit dj_b = P1^1;sbit dj_c = P1^2;sbit gd_s = P3^3;sbit key_s = P3^4;sbit key_j = P3^5;sbit dog = P3^0;uchar bdata flg;sbit s_bit = flg^0;sbit j_bit = flg^1;uchar data bzjs=0; //计时单元uchar data dqdjbz=0; //当前电机步骤uchar data djzt=0; //电机状态01==升10==降00==保uchar data dqdjabc=0x06;uchar data key=0x30; //键值//定时单元uchar data sh=0;uchar data sl=0;//脉冲宽度uchar code s_sj=5; // 升时每拍时间为5毫秒uchar code j_sj=7; // 降时每拍时间为7毫秒//电机步骤代码uchar code dj[6]={0x06,0x04,0x05,0x01,0x03,0x02};//===================================================void delay10ms(void){uchar i,j;for(i=0;i<12;i++){for(j=0;j<200;j++){dog = ~dog;}}}void timer0() interrupt 1 {TH0=sh; //TL0=sl;if(s_bit){bzjs++;if(bzjs>(s_sj-1)){bzjs = 0;dqdjbz++;if(dqdjbz>5){dqdjbz = 0;}djzt = 0x01;dqdjabc = dj[dqdjbz];}}if(j_bit){bzjs++;if(bzjs>(j_sj-1)){bzjs = 0;if(dqdjbz>0){dqdjbz--;}else{dqdjbz = 5;}djzt = 0x10;dqdjabc = dj[dqdjbz];}}if((s_bit==0)&&(j_bit==0)){bzjs = 0;if(djzt==0x01){switch(dqdjbz){case 1:dqdjbz = 2;break;case 3:dqdjbz = 4;break;case 5:dqdjbz = 0;break;}}if(djzt==0x10){switch(dqdjbz){case 1:dqdjbz = 0;break;case 3:dqdjbz = 2;break;case 5:dqdjbz = 4;break;}}djzt = 0;dqdjabc = dj[dqdjbz];djzt = 0x00;}P1 = dqdjabc;}void main(void){P1 = 0xff;P3 = 0xff;TMOD = 0x11;TH0 = 0xfc;TL0 = 0x73;TR0 = 1;ET0 = 1;dqdjbz = 0x00;P1 = 0x06;dqdjabc = 0x06;flg = 0;EA = 1;while(1){key = P3 & 0x30;if(key != 0){delay10ms();key = P3 & 0x30;//key = 0x20;}switch(key){case 0x20:s_bit = 1;j_bit = 0;break;case 0x10:j_bit = 1;s_bit = 0;break;case 0x30:s_bit = 0;j_bit = 0;break;}if(gd_s){sh = 0xfc; //1毫秒sl = 0x7b;}else{sh = 0xf8; //2毫秒sl = 0xe0;}}}。
单独按键控制无感无刷电机的程序范例

单独按键控制无感无刷电机的程序范例1.引言1.1 概述概述在现代科技的快速发展下,无感无刷电机作为一种新型的电动机械设备,逐渐成为各行各业中普遍采用的驱动器。
相比传统的有刷电机,无感无刷电机具有高效、可靠、寿命长等优点,广泛应用于电动车、家电、工业自动化等领域。
本文将重点介绍如何通过单独按键来控制无感无刷电机,为读者提供一个程序范例,帮助他们进一步理解和运用这一技术。
通过本文的学习,读者将了解到无感无刷电机的原理和实现步骤,为他们在实际应用中解决相关问题提供帮助。
在下一节中,我们将详细介绍无感无刷电机的原理,包括其工作原理和基本结构。
随后,我们将给出单独按键控制无感无刷电机的实现步骤,并提供相应的程序范例。
最后,我们将总结本文的内容,并展望未来无感无刷电机在各个领域的广泛应用前景。
通过阅读本文,读者将能够全面了解单独按键控制无感无刷电机的方法和原理,为他们在实际项目中运用这一技术提供参考。
我们希望本文能对读者有所启发,并促使他们在无感无刷电机的研究和应用中取得更多的突破和进展。
1.2文章结构文章结构部分的内容可以是对整篇文章的组织和结构进行介绍和总览。
下面是一个可能的编写内容示例:1.2 文章结构本文将以单独按键控制无感无刷电机为主题,分为引言、正文和结论三个部分。
引言部分将包括概述、文章结构和目的三个小节。
首先,我们将概述单独按键控制无感无刷电机的背景和意义,介绍该技术的应用领域和潜在的优势。
接着,我们将详细说明文章的结构,阐明各个部分的内容和逻辑顺序。
最后,我们将明确本文的目的,即通过示例代码和实现步骤,帮助读者理解和掌握单独按键控制无感无刷电机的程序编写方法。
正文部分将包括单独按键控制无感无刷电机的原理和实现步骤两个小节。
在原理部分,我们将详细介绍无感无刷电机的工作原理和原理解析,包括电机控制器、传感器和定位算法等关键技术。
在实现步骤部分,我们将给出具体的程序范例,说明如何通过按键控制无感无刷电机的启动、停止和调速等基本操作。
步进电机程序代码
/******************************************************************/ /*****************************************************************/ /*/* 步进电机加减速运行程序/* 步进电机启动时,转速由慢到快逐步加速。
/* 步进电机匀速运行/* 步进电机由快到慢逐步减速到停止/*/******************************************************************/#include <reg52.h>#include <string.h>#define uchar unsigned char#define uint unsigned intsbit addr0 = P1^4;sbit addr1 = P1^5;sbit addr2 = P1^6;sbit addr3 = P1^7;uchar code FFW[8]={0x0e,0x0c,0x0d,0x09,0x0b,0x03,0x07,0x06};//正转数组uchar code REV[8]={0x06,0x07,0x03,0x0b,0x09,0x0d,0x0c,0x0e};//反转数组uchar rate ;/********************************************************//*/* 延时/* 11.0592MHz时钟,/*/********************************************************/void delay(){uchar k;uint s;k = rate;do{for(s = 0 ; s <200 ; s++) ;}while(--k);}void delay2(uchar k){uchar s;for(s = 0 ; s <k ; s++) ;}/********************************************************/ /*/*步进电机正转/*/********************************************************/ void motor_ffw(){uchar i;for (i=0; i<8; i++) //一个周期转30度{P0 = FFW[i];//取数据addr0 = 1;addr1 = 0;addr2 = 1;addr3 = 1;addr3 = 0;delay(); //调节转速}}/********************************************************/ /*/*步进电机反转/*/********************************************************/ void motor_rev(){uchar i;for (i=0; i<8; i++) //一个周期转30度{P0 = REV[i]; //取数据addr0 = 1;addr1 = 0;addr2 = 1;addr3 = 1;addr3 = 0;delay(); //调节转速}}/******************************************************** **步进电机运行**********************************************************/ void motor_turn(){uchar x;rate=0x30;x=0xf0;do{motor_ffw(); //正转加速rate--;}while(rate!=0x0a);do{motor_ffw(); //正转匀速x--;}while(x!=0x01);do{motor_ffw(); //正转减速rate++;}while(rate!=0x30);do{motor_rev(); //反转加速rate--;}while(rate!=0x0a);do{motor_rev(); //反转匀速x--;}while(x!=0x01);do{motor_rev(); //反转减速rate++;}while(rate!=0x30);}/******************************************************** ** 主程序**********************************************************/ main(){P1=0xf0;while(1){P0 = 0x00;//ULN2003输出高电平addr0 = 1;addr1 = 0;addr2 = 1;addr3 = 1;addr3 = 0;delay2(255);motor_turn();}}。