关于各个CPU调速器的说明
EPG及GAC电子调速器调整说明
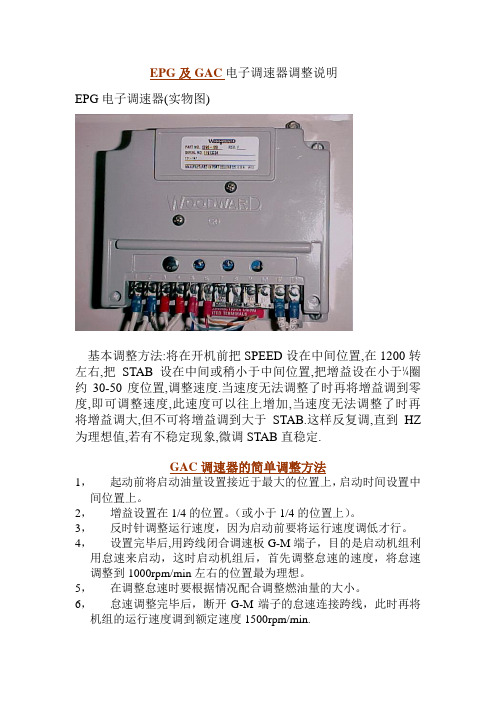
EPG及GAC电子调速器调整说明EPG电子调速器(实物图)基本调整方法:将在开机前把SPEED设在中间位置,在1200转左右,把STAB设在中间或稍小于中间位置,把增益设在小于¼圈约30-50度位置,调整速度.当速度无法调整了时再将增益调到零度,即可调整速度,此速度可以往上增加,当速度无法调整了时再将增益调大,但不可将增益调到大于STAB.这样反复调,直到HZ 为理想值,若有不稳定现象,微调STAB直稳定.GAC调速器的简单调整方法1,起动前将启动油量设置接近于最大的位置上,启动时间设置中间位置上。
2,增益设置在1/4的位置。
(或小于1/4的位置上)。
3,反时针调整运行速度,因为启动前要将运行速度调低才行。
4,设置完毕后,用跨线闭合调速板G-M端子,目的是启动机组利用怠速来启动,这时启动机组后,首先调整怠速的速度,将怠速调整到1000rpm/min左右的位置最为理想。
5,在调整怠速时要根据情况配合调整燃油量的大小。
6,怠速调整完毕后,断开G-M端子的怠速连接跨线,此时再将机组的运行速度调到额定速度1500rpm/min.7,如机组运行不稳定在调整增益及稳定。
8,再次重新启动机组,有问题再做必要的调整。
9,机组带载测试,如果机组带载速度有所下降,需要再对调速板速度下坡率的调整。
10, 对于冷机也要进行一些次测试才行,有时热机正常冷机不好要反复调整,11, 建议把调速器的怠速G---M端子利用上,闭合G-M可实现怠速功能。
调速板样品如下图:启动前先将运行速度调低,短接GM端子实现怠速,启动后先调好怠速再断开GM端子,再调整运行速度调整到额定。
mcu调速器说明书

mcu调速器说明书一、产品概述MCU调速器是一种基于微控制器单元(MCU)技术的调速器,用于控制电机的转速,广泛应用于工业自动化领域。
本调速器具有高性能、可靠性强、操作简便等特点,可以满足各种复杂环境下的需求。
二、产品特点1.高性能:MCU调速器采用高性能的微控制器单元,具有强大的处理能力和高速运算能力,可以实现精确的转速控制和运动控制。
2.可靠性强:调速器内置多种故障保护机制,如过压保护、过流保护、短路保护等,有效保护电机和调速器的安全运行。
3.操作简便:调速器采用用户友好界面,可以通过触摸屏或按钮进行参数设置,操作简单方便。
4.多种控制方式:调速器支持多种控制方式,包括外部模拟信号控制、PID闭环控制、速度预设控制等,可以满足不同场景下的控制需求。
三、产品参数1.输入电源:AC220V或AC380V,根据实际情况选择。
2.输出电压:根据电机的额定电压设定输出电压。
3.输出电流:根据电机的额定电流设定输出电流。
4.控制方式:支持外部模拟信号控制,输入信号范围为0-10V;支持PID闭环控制,可以设置比例、积分和微分参数;支持速度预设控制,可以设置预设速度。
5.工作温度:-10℃至60℃,在此温度范围内可正常工作。
6.存储温度:-20℃至80℃,在此温度范围内可安全存放。
四、使用方法1.接线:将输入电源和输出电机正确接入调速器的对应接口,确认接线无误后进行下一步操作。
2.参数设置:按下调速器上的设置按钮,进入参数设置界面。
根据电机的额定电压和额定电流,设置输出电压和输出电流的数值;根据控制方式的选择,设置相应的参数,如比例、积分和微分参数。
设置完成后,保存参数并返回主界面。
3.控制方式选择:根据实际需求选择控制方式,如外部模拟信号控制、PID闭环控制或速度预设控制。
通过触摸屏或按钮选择控制方式。
4.运行控制:选择好控制方式后,按下启动按钮,调速器开始运行。
根据控制方式需要,输入相应的控制信号,调速器将根据信号控制电机的转速。
BW(S)T系列微机调速器说明书(定稿版)
BW(S)T系列步进式可编程微机调速器说明书武汉聚能电气有限公司2004年6月目录第一章综合概述.................................................... - 1 -1水轮机调速器简介............................................... - 1 -2微机调速器的发展............................................... - 1 -3调速器分类..................................................... - 1 -4BW(S)T系列步进式微机调速器型号定义.......................... - 1 -5BW(S)T系列步进式微机调速器供货范围.......................... - 1 -第二章BW(S)T系列步进式微机调速器系统构成....................... - 3 -1微机调节器..................................................... - 4 -1.1调节器系统组成及工作原理............................... - 4 -1.2调节器主要功能模块..................................... - 4 -2机械液压系统................................................... - 7 -2.1概述................................................... - 8 -2.1工作原理............................................... - 8 -2.2机械液压系统的主要特点................................. - 8 -2.3主要零部件............................................. - 8 -2.4机械基本参数........................................... - 10 -第三章控制说明.................................................... - 10 -1工况说明...................................................... - 10 -2可编程PLC程序................................................ - 12 -3调速器协联.................................................... - 14 -3.1双调节水轮机的协联概述................................. - 16 -3.2双调节水轮机的协联分类及构成........................... - 16 -3.3数字协联控制........................................... - 16 -4调节控制简介.................................................. - 14 -4.1PID控制................................................. - 14 -第四章主要技术参数及功能特点...................................... - 16 -1主要技术参数.................................................. - 16 -1.1动、静态特性........................................... - 16 -1.2可靠性................................................. - 16 -1.3调节性能及相关性能保证................................. - 16 -1.4主要技术数据........................................... - 16 -2功能特点...................................................... - 16 -2.1综合特点............................................... - 16 -2.2机械特点............................................... - 16 -2.3电气特点............................................... - 16 -第五章步进式微机调速器操作运行................................ - 16 -1机械手动...................................................... - 16 -2电手动运行.................................................... - 16 -3自动运行...................................................... - 16 -第六章安装、调试及维护............................................ - 20 -1调速器的安装.................................................. - 20 -2 调速器的拆装和清洗............................................ - 20 -3 调速器的调试.................................................. - 20 -3.1电-位移转换器反馈的零位调整............................ - 20 -3.2导叶反馈的零位和满度调整............................... - 20 -3.3开、关机时间调整....................................... - 20 -3.4调速器出厂试验:详见出厂试验报告。
调速器的模式

调速器的模式(1)调速器的运行模式冬4-54是DG08800e数字调速单元的挖制面板,左面为调速器控制部分右面为执行机构(ACTUATOR)控制部分,右面的钥匙开关是两部分公用的。
两部分的指示灯和按钮的作用大同小异,下面仅以调速器部分为例加以说明。
控制面板的左上方有六个运行模式(MODE)指示灯,它们分别指示六种不同的运行模式,同--时刻,系统只能在一种模式下工作。
这六种模式的进入,切换方法以及在该模式下系统的主要功能是:①正常(NORMAL)模式“NORMAL”指示灯亮,表示系统在正常模式下工作。
该模式的进入是由备车和各种有效的遥控操纵而自动实现的,假如,主机在备车完成后的停车状态,现在操纵车钟手柄操正车或倒车,系统便自动进入正常模式,调速器控制面板左上方的“NORMAL”指示灯亮。
在这种模式下,主机处在遥控系统的正常控制之中,,并且所有的系统参数和数据都可以利用相应的参数代码进行查询、监视或修改,所有调整后的系统参数都将被存储下来,关掉电源后这些被调整和存储的参数仍保留在存储器中。
②空闲(IDLE)模式空闲(IDLE)模式也可说是运行就绪模式或停车模式,在系统加电后,或系统处在停车状态,或进行启/停逻辑操作的机动操作过程中,或车钟手柄放在停车位置时,系统都会自动进入空闲模式,此时“IDLE”指示灯亮。
在空闲模式下,可以进行参数查询和修改。
③设定值(SETPOINT)模式设定值模式又称直接燃油量控制模式,是一种由车钟手柄发出的车令转速设定信号,既不通过加/减速速率限制等转速设定值限制环节的限制,也不通过调速器的运算和调节,而直接发送到电动执行机构前的选小器,从而实现直接控制主机油门开度的应急操作模式。
这种操作模式比以往的机旁应急操作更加方便、快捷和舒适。
通常在主机遥控系统发生故障时才运行该模式。
【发烧友文献】安卓系统下CPU调速器和IO调度详解(中文说明)
现在很多rom 都有超频内核,很多人不知道内核中的CPU 调速器有什么用下面给大家详细介绍一下CPU 调速器Governor说明说明::什么是Governor?→Android 的CPU 的频率并不是一成不变的的频率并不是一成不变的,,会因应程式所需而调整频率会因应程式所需而调整频率,,通常会视乎CPU Loading%而升而升//降频降频,,在特定时间再检查是否升在特定时间再检查是否升//降。
Governor 就是默认的情景模式。
【ondemand ondemand】按需模式】按需模式】按需模式::→按需调节cpu 频率频率,,不操作手机的时候控制在最低频率不操作手机的时候控制在最低频率,,滑屏或进入应用后会迅速提升至最高频率最高频率,,当空闲时迅速降低频率当空闲时迅速降低频率,,性能较稳定性能较稳定,,但因频率变化幅度过大但因频率变化幅度过大,,省电方面只有一般的水平。
是一种在电池和性能之间趋向平衡的默认模式水平。
是一种在电池和性能之间趋向平衡的默认模式,,但是对于智能手机来说但是对于智能手机来说,ondeman ,ondeman ,ondemandd 在性能表现方面略有欠缺。
【interactive interactive】交互模式】交互模式】交互模式::→和ondemand 相似相似,,规则是规则是““快升慢降快升慢降””,注重响应速度注重响应速度、、性能性能,,当有高需求时迅速跳到高频率频率,,当低需求时逐渐降低频率当低需求时逐渐降低频率,,相比ondemand 费电【conservative conservative】保守模式】保守模式】保守模式::→和ondemand 相似相似,,规则是规则是““慢升快降慢升快降””,注重省电注重省电,,当有高需求时逐渐提高频率当有高需求时逐渐提高频率,,当低需求迅速跳至低频率。
【OndemandX OndemandX】按需】按需X 模式模式::→在Ondemand 基础上改进而来。
微机调速器介绍
三、主要特点(二)
9、PCC的大内存,为智能型调速器提供了资源保证,PCC 的为常规PLC内存的一百余倍。 10、采用数字阀做为电液转换元件。 11、可以适应电站的各种特殊运行方式 13、无杠杆结构。该系列调速器采用了数字阀液压随动 系统,手动无需反馈,因此取消了杠杆,消除了因为 杠杆造成的死区,提高了调速系统的精度,而且无管 路,结构简单,美观。 14、友好的人机界面。采用触摸屏做为人机界面,画面 美观逼真,全中文显示,操作方便,可以同时显示很 多信息。 15、维护简单调试方便。由于PCC的调度集成化和高可靠 性,对于运行维护人员没有太高的特殊要求,调试只 需设定有关数字,没有太多的电位器等可调元件。
微机调速器介绍
YZFT—300/600/1000数字阀 数字阀PCC可 数字阀 可 编程智能调速器
使用地点: 使用地点:福集水电站
一、概述
YZFT—300/600/1000数字阀PCC可编程 智能调速器是将诸多功能集成于可编程 计算机控制器(PCC)内,配以数字阀 随动系统构成的高可靠性的中小型水轮 机调速器。 该调速系统的先导电磁阀具有手动阀及 事故阀的功能,减化了调速器内部结构, 因此该型调速器实现了真正意义上的无 杠杆,无管路,可靠性极高,性能优良, 是水电站提高自动化程度的最理想产品。
电气控制装置图
调 速 器 的 外 形 图
五、结束语
微机调速器是水电站发展应用的方 向,它的最大特点是:运行维护简单、 可靠,特别能保证水电站甩负荷后机组 能稳定到空载,为水电站的安全提供了 可保证。
复习思考题
1、微机速器的结构特点 2、运行特点 3、主要功能
四、调速器的主要功能 (一)
1、通过远方或现场控制,能使水轮发电机组自动运行于: 起动,停机,空载,带负荷等工况,并具有紧急停机 功能。 2、具有手动运行功能,并可实现手动与自动运行的相互 无扰动切换。 3 3、空载运行时,能自动跟踪系统频率,实现快速并网。 4、功率调节模式下,可接受上位机控制指令,实现发电 自动控制功能分 2、机械部分
学习一下安卓cpu调速器与IO调度基本知识

本人一直不明白安卓cpu 和I/O,今日有幸找到,分享给大家一、CPU调速器现在很内核都会增加新的CPU调速器,很多人不知道内核中的CPU调速器有什么用,下面转一个CPU调速器Governor说明:什么是Governor?→Android的CPU 的频率并不是一成不变的,会因应程式所需而调整频率,通常会视乎CPU Loading% 而升/降频,在特定时间再检查是否升/降。
Governor就是默认的情景模式。
【ondemand】按需模式:→按需调节cpu频率,不操作手机的时候控制在最低频率,滑屏或进入应用后会迅速提升至最高频率,当空闲时迅速降低频率,性能较稳定,但因频率变化幅度过大,省电方面只有一般的水平。
是一种在电池和性能之间趋向平衡的默认模式,但是对于智能手机来说,ondemand在性能表现方面略有欠缺。
【interactive】交互模式:→和ondemand相似,规则是“快升慢降”,注重响应速度、性能,当有高需求时迅速跳到高频率,当低需求时逐渐降低频率,相比ondemand费电【conservative】保守模式:→和ondemand相似,规则是“慢升快降”,注重省电,当有高需求时逐渐提高频率,当低需求迅速跳至低频率。
【OndemandX】按需X模式:→在Ondemand基础上改进而来。
关屏时手机进入睡眠状态时,锁定最高频率频率为500Mhz【Scary】胆小模式:→基于Ondemand修改,CPU提升速度比ondemand慢,同时具有smartass的特点【interactiveX】交互X模式:→在interactive基础上改进而来。
关屏时手机进入睡眠状态时,锁定频率为最低值,同时在手机唤醒时能有更好的提升表现。
比interactive更注重保护电池。
【Wheatley】惠特利模式:→规则和Ondemand一样,但是响应速度稍慢,比Ondemand省电【hotplug】热拔插模式:→和ondemand模式差不多,当有高需求时直接跳到最高频率,当需求见效时逐级降低频率,但关屏时就单核低频运行,省电。
PCC调速器使用说明

第一章概述可编程计算机系列水轮机调速器是我所2001年研发的一代新型水轮机调速器,它充分考虑了PLC和IPC两种机型的优点,充分发挥了可编程计算机控制器(PCC)的技术特点,是总结了长控所双微机调速器和全可编程调速器的经验成果而研制的一类新型调速器。
PCC系列调速器适用于大、中、小型混流、转桨、贯流、冲击式等机组。
是长控所大、中型调速器的推荐方案之一。
1.1功能和特点1.1.1本调速器具有如下功能1频率测量与调节:可测量机组和电网的频率,并实现机组频率的调节和控制。
2频率跟踪:当跟踪功能投入时,机组频率自动跟踪电网频率,可实现快速自动同期并网。
3自动调整与分配负荷:机组并入电网,调速器将根据其整定的bp值和电网频差,自动调整机组的出力。
4负荷调整:可接受上位机控制指令,实现发电自动控制功能( A.G.C)。
5开停机操作:接受中控室或上位机指令,实现开停机操作。
6手动操作:具有电手动和机械手动操作功能,并可无条件、无扰动实现自动运行与手动操作的相互切换。
7能采集并显示调速系统的主要参数,如:机组频率、电网频率、导叶开度、调节器输出和调节器的整定参数等。
8有完善的通讯功能,为电站监控系统设置了标准、可靠的接口,能方便地实现与上位机的通讯。
9具有频率计的相关试验功能。
10辅助实验功能:通过操作面板上的功能键和显示屏,可以很方便地完成空载摆动和静态特性测试实验。
1.1.2本调速器的主要特点1可靠性问题PCC调速器的电气部分由PCC控制器、操作显示面板、各功能模块等构成,平均无故障时间可达50万小时即57年,因此具有比PLC调速器更高的可靠性。
2测频问题a测频通道多PCC调速器有四路测频通道,可以用于①机组PT测频、②机组齿盘测频(两路)、③电网频率测量,因此测频容错能力强。
b测频精度高由于一般的微机测频都采用1M计数时钟,而B&R2003系列CPU的内部计数时钟10M左右。
因此,PCC测频精度远比一般的微机测频精度高。
手机CPU调速解说,超频必备常识,教你如何选择CPU调速器
CPU调速器(CPU Governor)就是为CPU制定的一套行为规则,CPU会按照这个规则运行。
另外,既然是简单介绍,所以原理性的东西统统靠边,只在乎作用,只在乎效果。
最后还要说明的是,CPU调速器本身没有好坏之分,只有适合或者不适合,所以大家不要纠结什么调速器最好这样的问题,选择合适的即可,如果拿不定主意的话可以换着尝试一下。
以下列出的是常见的CPU调速器:Ondemand:最常见的CPU调速器,几乎所有的官方内核都默认使用这种调速器。
规则很简单,有高需求时迅速跳到最大频率,低需求时迅速降到最小频率。
Conservative:很常见的调速器,规则是“慢升快降”,注重省电,当有高需求时逐渐提高频率,当低需求迅速跳至低频率。
Interactive:很常见的调速器,规则和Conservation 相反,是“快升慢降”,注重响应速度(性能),当有高需求时迅速跳到高频率,当低需求时逐渐降低频率。
Lulzactive:较新的一款调速器,根据负载逐级升高或降低频率,每一级频率有一个限制值,负载高于限制值就提高一级频率,低于限制值就降低一级频率。
所以这个调速器在各个频率上的停留时间都很短。
这个调速器的特点是在各个频率之间频繁变动,但是运行于最高和最低频的时间最多。
Minmax:较新的一款调速器,规则很简单,要么最高要么最低。
SmartassV2:因为SmartassV2是Smartass的升级版,所以很多较新内核都直接支持SmartassV2,Smartass 主要是较早的内核支持,故这里只介绍V2。
SmartassV2会使频率趋近与某一特定的值,使CPU 频率大部分维持在这一特定值附近。
同时SmartassV2在屏幕开启和关闭时有不同的特定值,以达到省电的目的。
Lazy:很少用的调速器,对于频率上升和下降的响应都很迟缓,可以忽略掉部分迅速变化的频率变化,优点是省电。
Lagfree:很少用的调速器,简单的描述就是不紧不慢型,无论负载变化快慢与否,CPU都按一定的停顿时间逐级升高或降低频率。
590C直流调速器参数快速设置说明

590C直流调速器参数快速设置说明
一、仪表调节范围
1. 调速电机最高转速:nmax=1000转/分钟。
2. 电流调节范围:调速电机最大电流为10A。
3. 电压调节范围:220V-480V。
4. 输出频率调节范围:0-60Hz。
二、快速设置方法
1. 首先将手轮控制(手轮调节方向)设置为“关”,确保电机处于静止状态。
2. 然后,按下“自动调节”或“手动调节”,使调速器进入调节模式,即“自动调节”或“手动调节”处于“开”状态。
3. 此时,可以通过“滑动开关”调节电机最大转速。
4. 然后在“电压调节”处设置电压调节范围220V-480V。
5. 根据需要,在“频率调节”处设置调节范围(0-60Hz)。
6. 最后,根据需要在“分功率调节”处设置电机最大电流,即最大电流调节范围为10A。
三、快速设置总结
1. 调速器上必须将手轮控制(手轮控制方向)设置为“关”,确保电机处于静止状态。
2. 在“自动调节”或“手动调节”处将处于“开”状态,以进入调节模式。
3. 在“滑动开关”处设置调节范围(1000转/分)。
4. 在“电压调节”处设置电压调节范围(220V-480V)。
5. 在“频率调节”处设置调节范围(0-60Hz)。
无刷马达电子调速器(ESC)说明书
无刷马达电子调速器( ESC)说明书 感谢您购买本产品!无刷动力系统功率强大,错误的使用可能造成人身伤害和设备损坏。
为此我们强烈建议您在使用设备前仔细阅读本说明书,并严格遵守规定的操作程序。
我们不承担因使用本产品或擅自对产品进行改造所引起的任何责任,包括但不限于对附带损失或间接损失的赔偿责任。
1. 所有器件均为原装正品,确保电调具有一流品质和极高的可靠性。
2. 具有强大的耐流能力。
3. 可设定油门行程,兼容各种遥控器。
具备平滑、细腻的调速手感、一流的调速线性。
4. 最高转速可以达210000 RPM(2 极马达)、70000 RPM(6 极马达)、35000 RPM(12 极马达)。
1. 电池类型:Lipo(锂电池)。
2. 电池低压保护模式:电压到达低压保护时限制油门最大开度只到40%。
3. 进角:分低、中、高三档。
一般情况下,低进角可以适应较多的马达。
但是因为马达结构差异很大,请试用各个进角以获得满意的驱动效果。
改变进角后,建议先在地面进行测试,然后再飞行。
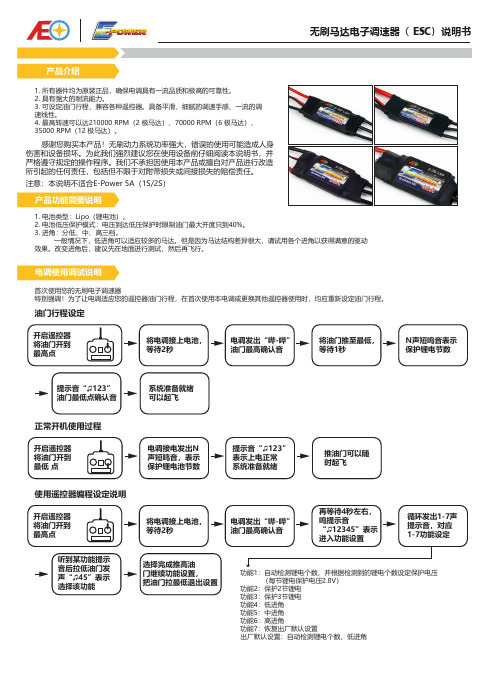
首次使用您的无刷电子调速器特别强调!为了让电调适应您的遥控器油门行程,在首次使用本电调或更换其他遥控器使用时,均应重新设定油门行程。
油门行程设定正常开机使用过程使用遥控器编程设定说明N声短鸣音表示保护锂电节数提示音“♫123”油门最低点确认音系统准备就绪可以起飞推油门可以随时起飞功能4:低进角功能5:中进角功能6:高进角功能7:恢复出厂默认设置出厂默认设置:自动检测锂电个数、低进角注意:本说明不适合E-Power 5A(1S/2S)Instructions for Brushless Motor ESC •Thank you for purchasing this product. It is strongly recommended that you read this manual carefully before using the device and strictly comply with the specified operating procedures. We are not responsible for any liability arising from the useof this product.1.All devices are original and genuine, ensuring that the ESC is of the highest quality and high reliability.2. It can withstand a higher current.3. It can set the throttle stroke, compatible with a variety of remote control .With smooth and delicate feel of speed control,first-class linear speed regulation.4. The maximum speed can be reached 210,000 RPM (2-pole motor), 70,000 RPM (6-pole motor) and 35,000 RPM (12-pole motor).1. The type of battery: Lithium battery / NI-MH battery2. Battery low voltage protection mode: limit the throttle to only 40% when the voltage reaches low voltage protection.3. Advance angle: divided into low, medium and high.In general, the low advance Angle can accommodate more motors. However, as the motor structure is quite different, please try each advance Angle to get a satisfactory driving effect. In order to improve the speed, the advance Angle can be set as the high advance Angle. After changing the approach Angle, it is recommended to test on the ground before flying.Using your brushless ESC for the first time Please pay attention! In order to adapt the ESC to your remote control throttle stroke, the throttle stroke should be resetting for the first time when using this ESC or changing other remote controls, so as to get the best linear throttle.Setting instructions of throttle strokeInstruction of Normal BootProgramming instructions for using the remote controlFunction 3: Protect 3 lithium batteries Function 4: Low advance angle Function 5: Medium advance angle Function 6: High advance angle Function 7: Restore factory defaults Factory default setting: automatic detection of the number of lithium batteries, low advance angle.After hearing a certain function sound, pull down the throttle and sound "♫45" to select this function.The lowest voice "♫123" from ESC indicates the throttle to be the lowest.The system is ready to take off.Push the throttle to take off at any time.Connect the ESC to the battery and wait for 2 seconds.The sound of short beep indicates the number of lithium battery protection.Note: This manual is not suitable for E-power 5A (1S/2S)。
调速器讲解
今天,很荣幸由我来给大家讲课,此次讲课的内容是:调速器。
首先,我们讲讲它的作用。
水轮机调速器的作用是通过控制导水叶接力器(桨叶接力器)接力器的操作油量来控制导水叶(桨叶)的开度大小进而控制水轮机过水流量的大小来调整水轮机的转速,也就是调整水轮机的转速的作用。
水轮机调速器可按调节对象分为单调节调速器和双调节调速器,即俗称的单调调速器和双调调速器,也可按调节元件分为机械调速器(即ST和T型)、电气调速器(DST型和DT型)、微机调速器(即WST型和WT型)等。
接着,我们来看看它的动作原理:机组正常运行时测频装置采集机组频率,是通过机组残压PT、网频PT和齿盘来采集--将采集频率与给定频率(一般是正负50 。
2HZ)偏差反馈至调速器,调速器根据频率偏差通过PID计算结果向步进电机(或比列伺服阀)输出一个控制电压来驱动电机旋转从而联动引导阀动作---引导阀动作向主配压阀控制腔配油--主配压阀动作向导叶接力器配油----接力器动作带动导叶动作。
然后,说说平时经常用得到的运行操作。
调速器运行操作6.1调速器系统运行规定6.1.1调速器正常运行方式为A、B机“远方自动”运行方式;6.1.2正常情况下,当调速器在“自动”运行方式不能稳定运行,应手动切为“电手动”运行方式,并设人定点监视;6.1.3调速系统检修后,对接力器进行充油时必须全行程开关导叶2至3次,进行排气,并检查有无渗漏油情况;6.1.4调速系统检修进行排压(或充压)和操作导叶时,必须检查导水机构转动部分无人作业及无异物,相应工作票全部收回;6.1.5调速器油泵正常均切“自动”运行,其运行与备用由PLC自动轮换;6.1.6检修在拆卸组合阀之前,运行人员必须将组合阀通向压力油罐油路上的阀门关闭,避免压力油从控制孔喷出;6.1.7手动操作压油泵时,应注意监视压油槽油压,操作人员严禁离开现场;6.1.8正常情况下,压油罐自动补气装置应在“自动”运行方式,当自动补气装置故障时,应进行手动补气调节油面;6.1.9调速器油泵、漏油泵检修后,必须手动盘车良好,检查旋转方向正确;6.1.10自动补气装置故障或其他原因不投运,可以采取手动补气方式;6.1.11调速器的电气柜上的“远方/现地”方式切换把手,正常在远方位;6.1.12只有现地运行方式,调速器电气柜的“增加/减少”才起作用。
微星主板的CPU风扇自动调速设置

微星主板的CPU风扇自动调速设置1、设置调速目标温度在BIOS的H/W Monitor选项中开启CPU Smart FAN Target,设置风扇调速的目标温度,就是设置你希望风扇全速运转的温度,比如设置在45,就是CPU温度达到45℃时风扇全速运转,低于45℃时低速运转。
2、设置低速速度设置了目标温度后,就弹出一项CPU Min.FAN Speed(%)选项,这是让你设置风扇的最低转速。
这里用全速的百分比表示,12.5%-87.5%,你可以依据自己PC和环境实际情况设置,比如设置在50%,在CPU温度低于目标温度是就以风扇全速的一般速度运转。
设置后保存重启,才生效。
这是设置62.5%的风扇转速这是设置37.5%的风扇转速扇转速传感器是一种叫做“霍尔元件”芯片,调速则是通过PWM脉宽调制,所以现在的调速风扇是4Pin的,以前3pin的是通过电压调速,调压电路在主板上。
由于各种调速风扇的调速不完全一致,需要多做几次测试,才可以确定合适的目标温度和最低转速。
仅供个人用于学习、研究;不得用于商业用途。
For personal use only in study and research; not for commercial use.Nur für den persönlichen für Studien, Forschung, zu kommerziellen Zwecken verwendet werden.Pour l 'étude et la recherche uniquement à des fins personnelles; pas à des fins commerciales.толькодля людей, которые используются для обучения, исследований и не должны использоваться в коммерческих целях.以下无正文仅供个人用于学习、研究;不得用于商业用途。
CPU超频以及IO调度模式详解
CPU模式:ondemand【按需模式】官方及xray内核默认为此项调节模式,顾名思义,按需调节cpu频率,不操作手机的时候控制在最低频率,滑屏或进入应用后会迅速提升至最高频率,当空闲时迅速降低频率,性能较稳定,但因频率变化幅度过大,省电方面只有一般的水平。
powersave【省电模式】按设定最低频率运行,最省电也最龟速,日常没有使用价值,除非配合setcpu情景模式,关屏睡眠时使用此调节模式performance【高性能模式】和省电模式相反,始终按设定最高菜谱频率运行,最耗电也最刚猛!此模式亦无任何日常使用价值,果断passuserspace【用户隔离】严格来说它并不是一个模式,是允许非内核进程控制cpu频率的设置,现在已经不需要它了,setcpu官方的建议是,“不要使用此选项”。
conservative【保守模式】和ondemand模式的调频设定类似,不过有操作时提升cpu频率的速度较慢,空闲时迅速降频,所以名字叫保守模式,性能较低,省电程度略好于ondemand,随着CPU负荷加大,频率逐级上升,在CPU闲时频率逐级下降,因此这个设置相对于ondemand模式省电,但变频不够顺滑,所以会有卡顿现象。
总体不推荐interactive【交互模式】相对于保守模式,这个模式算是高性能版的ondemand,开始操作手机后,频率升至最高,可以带来更好的响应速度,空闲时缓慢降至设定最低频率。
电量自然也是要多费一点。
interactivex交互模式的修改优化版,开屏后进入更好的频率管理方式,比交互模式略省电。
hotplugray没有此模式,多核机型上可用,在不需要的时候关闭多余核心,其他部分调节方式与ondemand相同。
smartass【智能调节模式】相当于是一个预置的profile,交互模式的另一个修改版,更加省电。
根据资源使用智能提供一个适中的频率,空闲时自动降频,锁屏时自动固定频率。
特色是锁屏后非常省电。
2301A负荷分配型2301A电子调速器操作说明
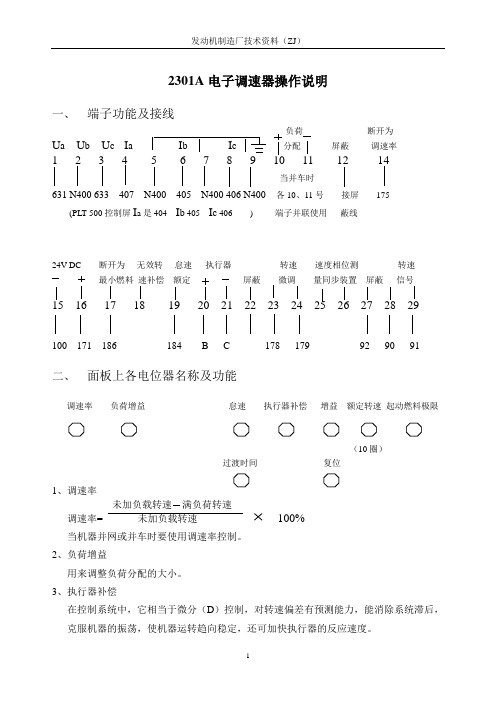
2301A电子调速器操作说明一、端子功能及接线负荷断开为U a U b U c I a I b I c分配屏蔽调速率1 2 3 4 5 6 7 8 9 12 14当并车时631 N400 633 407 N400 405 N400 406 N400 各10、11号接屏175 (PLT-500控制屏I a是404 I b 405 I c 406 ) 端子并联使用蔽线24V DC断开为无效转怠速执行器转速速度相位测转速最小燃料速补偿额定屏蔽微调量同步装置屏蔽信号16 17 18 21 23 24 25 29100 171 186 184 B C 178 179 92 90 91 二、面板上各电位器名称及功能调速率负荷增益怠速执行器补偿增益额定转速起动燃料极限(10圈)过渡时间复位1、调速率未加负载转速满负荷转速调速率= 未加负载转速100%当机器并网或并车时要使用调速率控制。
2、负荷增益用来调整负荷分配的大小。
3、执行器补偿在控制系统中,它相当于微分(D)控制,对转速偏差有预测能力,能消除系统滞后,克服机器的振荡,使机器运转趋向稳定,还可加快执行器的反应速度。
4、增益在控制系统中,它相当于比例控制(P),能够快速的达到控制目的。
一般在调整中首先要调整该电位器。
5、额定转速它是10圈的电位器,可快速调节;而其他电位器均是1圈的,均需缓慢调节。
6、动燃料极限当起动机器时,它可以限制燃料齿杆的位置极限。
另外,调整该电位器可设置所需执行器的最大位置。
7、过度时间表示的是从怠速到额定转速的过渡时间,通常将它顺时针旋到底,放到最大位置。
8、复位在控制系统中,它相当于积分(I)控制作用,对控制效果来说它能够消除系统的静态偏差。
一般的,积分时间越小积分作用越强,系统振荡越强;积分时间越大积分作用越弱,系统振荡越小。
我厂调试机器需要机器转速平稳,所以要削弱积分作用通常把它设置在5以上。
三、起动前初始设置1、额定转速电位器:逆时针旋到最小位置,控制屏上的转速微调电位器至于中间位置。
4、调速器功能说明
工业环境中的多数信号都存在干扰,也可能出现信号突然中断等情况。为保证机组 采用的信号更加接近真实值,使得设备更加安全稳定地运行,就必须对这些信号进行处 理,及时判断信号故障,并作出合理的应急处理。 针对本设备运行环境的特点,设备中采用“限幅滤波”的方式对模拟量信号进行处 理, 即不断地检测本周期采样与上周期采样的差值, 越过设置的容忍范围则本次值无效, 反之则有效,当采样数值越过所使用的传感器的有效量程之后会判采样故障。
4-5
调速器功能说明
※注意:调速器工作在任何状态下出现交流、直流工作电源全部消失的情况,调速 器将报大故障和工作电源消失。 调速器在任何工作状态下,由监控系统启动紧急停机流程或者事故停机流程的同 时,必须向调速器下发停机命令。
Байду номын сангаас
4.3 测量及滤波
4.3.1 信号测量
机组模拟量信号包括机端 PT 频率信号、系统 PT 频率信号、齿盘探头频率信号、 导叶接力器行程信号、机组有功功率信号、上位机功率给定信号、蜗壳水压信号等,调 速器通过测频专用模块、模拟量/数字量转换模块实现对以上信号的测量。
率死区自动投入。 调速器工作于“开度模式” ,负荷的调节方式为脉冲调节,调速器通过远方负荷增 减命令或电柜导叶增减旋钮使机组负荷进行增减操作。 调速器工作于“功率模式” ,则通过 LCU 模拟量给定功率或脉冲增减改变功率给定 值,调速器响应功率给定值变化操作导叶接力器使机组功率调节至给定的功率值。 调速器工作于“频率模式” ,则调速器将调整导叶开度,使得机组频率稳定在机组 额定值, “频率模式”下可以通过通讯下发或者导叶开度增减信号改变开度给定,导叶 开度的最终稳定值由控制器通过 PID 运算得出。
Woodward 505 使 用 说 明 书

Woodward 505 使用说明书1、概述WOODWARD 505是美国WOODWARD(伍德瓦特)公司日本分公司生产的,以微处理机为基础的数字式调节器。
采用16位CPU,每14ms 完成一次计算循环。
面板上带有一个26键的键盘和液晶显示窗口(LCD),可以通过键盘和LCD对调节器进行操作。
LCD显示分二行,上面一行为实际运行参数值,下面一行为设定值。
505具有二种工作方式,编程方式(或称组态)和运行方式。
所谓组态,即按汽轮机的用意,在选择项目中挑选出需要的内容。
组态完后便可进入运行方式来操作汽轮机从起动到停机的整个过程。
为了减少将阶跃干扰传入系统的可能性,在505组态完后可移动调节器机壳内的程序跨接器闭锁程序方式的入口通路,这样在汽轮机运行时将不能再使用程序方式。
2、键盘说明2.1、505键盘上26个薄膜开关的位置排列见下图。
2.2、各键的功能说明如下:FUNC(↑)/FUNC(↓)(function):向左或向右移动整个功能模块。
STEP(↑)/STEP(↓):在某一功能模块中向上或向下移动模块。
ADJ(↑)/ADJ(↓)(adjust):在运行方式中增大或减小任一可调参数。
DYN(dynamics):在运行方式中,调出控制执行机构位置参量的动态设定。
GAIN:在运行方式中,激活被显示动态比例增益设定(必须先按DYN 键,随后再依次作适当的动态校正)。
RST(reset):在运行方式中,激活被显示动态比例增益设定(必须先按RST 键,随后再依次作适当的动态校正)。
PRG(program):按此健,调节器由CONTROLLING PARAM/PUSH RUN OR PRG)状态转入程序方式。
RUN:按此健,调节器由CONTROLLING PARAM/PUSH RUN OR PRG)状态转入运行方式。
STOP:在程序方式中按此键调节器返回到准备就绪状态;在运行方式中,按此键经核实后则引发汽轮机可控停机。
QF-01调速器说明书

QF-01调速器说明书
YWCT-10×4/25-4.0-ZF(四喷嘴)数字阀PCC调速器是将诸多功能集成于可编程计算机控制器(PCC)内,配以数字阀随动系统构成的高可靠性的冲击式水轮机调速器。
目前,PLC在水轮机调速器上得到了较为广泛的应用,然而,多数调工速器厂家都采用了常规PLC,常规PLC自从七十年代以来,再也没有重大的改进。
常规PLC采用梯形图,指令表和相应的流程图,这三种语言都有一个共同点:它们都是面向硬件仿真的,采用程序扫描运行方式。
这种方式占用CPU的时间多,运行效率低。
另外,水轮机调速器具有特殊性,采用常规PLC,必须由调速器制造厂家附加很多电路,这必将使调速器整机的可靠性受到限制。
我公司经过对各种PLC的深入研究,分析对比,结合水轮机调速器的特殊性,选用不同于常规PLC的新一代可编程控制产品-PCC,即可编程计算机控制器B-amp;R2003。
为了满足自动化的新的需求,B-amp;R向传统的PLC观念告别,为自动化技术提供新的选择。
它面向自动化过程,而不是面向继电器逻辑电路仿真,这就是B-amp;R2003的理念。
PCC代表着一个全新的控制概念,它集成了可编程逻辑控制器(PLC)的标准控制功能和工业计算机的分时多任务操作系统功能。
它能方便地处理开关量,模拟量,进行回路调节。
并能用高级语言编程,具备大型机的分析运算能力。
其硬件具有独特新颖的插拔式模块结构,可使系统得到灵活多样的扩展和组合。
软件也具备模块结构,系统扩展时只需在原有基础
上叠加运用软件模块。
CPU运行效率高,用户存储器容量大。
这些优越性都为智能式水轮机调速器提供了强有力的资源保证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以下是一些收集CPU调速器资料后作出的简单分析,欢迎大家纠错、讨论
CPU调速器(CPU Governors)
调速器决定了手机CPU的工作方式,也可以说是频率自动调整的逻辑,直接关联到手机的性能与功耗
常见的调速器:
Performance
Powersave
Userspace
OndemandOndemandX
Conservative
Interactive
InteractiveX
smartass
Smoothass
SmartassV2
LagFreeBrazilianwax
Intellidemand
Lazy
Lionheart
LionheartX
Luzactive
Savagedzen
Scary
Wheatley
Hotplug
Minmax
Badass
Pegasusq / Pegasusd
MSM-DCVS
详细介绍:
Performance (Always Max)
强制CPU一直运行在最高频率
优点: 良好的性能、速度
缺点: 大功耗,糟糕的电池续航时间,导致手机发热较严重,长期使用会对硬件造成一定的物理损坏
Powersave (Always Min)
强制CPU一直运行在最低频率
优点:最小的功耗,最长的续航时间,最好的发热控制
缺点:糟糕的性能,运行不流畅,有延迟、卡顿
Userspace
用户控制模式,这不是一个预制调速方案的调速器,它允许用户通过非操控内核的方法调节CPU,但是事实在出现"set cpu"这类软件之后就等于废物了
优点:无
缺点:无
Ondemand
按照实际需求快速进行频率调节
优点:基本上实现了平衡,不错的性能兼有不错的续航
缺点:不断地调整CPU频率消耗了一定的电力,导致这只能是一个“理想中”完美的调速器,频率升高时也偏敏感了一些(例如需要500,可能会给你升到650)
Ondemand X
基于Ondemand改进,区分开关屏状态情景
优点:比Ondemand省电
缺点:关屏状态下的频率被锁定在一个特定值某些情况下可能睡死,稳定性不如Ondemand
Conservative
与Interactive相对,保守的调解方案,缓慢地提升频率,迅速地下降频率
优点:比Ondemand稍省电,在真的需要之前不会提高频率
缺点:缓慢地提升频率意味着在打开一些较大的APP或尝试唤醒待机中的机器会较慢
Interactive
与Conservative相对,快速提升频率,缓慢降低频率
优点: 比Ondemand稍强的性能,较快的响应速度
缺点: 在不需要时仍然维持较高的频率,比Ondemand耗电
Interactive X
基于Interactive改进,区分开关屏状态情景
优点:比Interactive省电
缺点:稳定性不如Interactive
Smartass
Interactive与Ondemand合体,理想中的完美品
优点: 比Ondemand更好的性能,比Interactive更好的续航
缺点: 频率下降在不需要时仍然偏慢(虽然比Interactive好),关屏后盲目降频有时导致后台程序(比如同时挂着QQ,微信,微博)工作不正常
Smoothass
优化过的Smartass,快速调节频率平衡续航与性能
优点:理论上比Smartass好的续航
缺点:类似于Smartass,虽然真的比Smartass略好但频率下降在不需要时偏慢仍然存在
SmartassV2
重写的第二代Smartass,添加结合Conservative的一些特性
优点: 在Smartass的基础上更好的性能与省电
缺点: 关屏后的问题仍然没有解决
LagFree
开屏后一下子跳到一个中度偏高频率,然后类似Conservative地工作
优点:算是解决了Conservative的迟钝问题
缺点:电老虎,虽然比Performance省电...
Lazy
偏向Conservative的Ondemand,据说播放影音很好用
优点:在频率提升/下降前都先调到一个特定的值,降低了关屏状态的最大值
缺点:比Ondemand发热稍厉害,执行耗费较多资源的应用时如果进入了关屏状态过久可能会睡死
Brazilianwax
类似SmartassV2,比SmartassV2更积极提高频率
优点:比SmartassV2好的性能
缺点:比SmartassV2差的续航
Intellidemand
以Ondemand为基础,根据GPU状态区分情景
优点:GPU忙时依照Ondmand模式工作,GPU"空转"或中度使用时频率锁定在定值
缺点:执行不太依存GPU运算但较耗费CPU资源的应用时可能会性能不足,GPU“空转”(闲时)不够省电
Lionheart
基于Conservative降低了频率下降的敏感度
优点:比Conservative强的性能
缺点:进入高频率后几乎成了Performance模式
Lionheart X
优化后的Lionherat
优点:结合了一点Smartass的特定,降低功耗
缺点:稳定性不如Lionheart
Luzactive
更偏向Interactive的Smartass,分几个固定的档进行调控
优点:分几个固定的档进行调控,性能功耗比较平衡
缺点:分几个固定的档不够灵活,关屏会设定为最低处理器速度可能导致睡死
Savagedzen
基于SmartassV2编写,比Brazilianwax平衡
优点:比SmartassV2好但比Brazilianwax差的性能,比SmartassV2差但比Brazilianwax好的续航
缺点:稳定性不如Brazilianwax
Scary
基于Ondemand,提速比Ondemand慢
优点:比Ondemand省电
缺点:频率提升慢了有时候会叫人抓狂..
Wheatley
基于Ondemand,提速降速都比Ondemand慢
优点:比Ondemand省电
缺点:频率提升慢了有时引发卡顿,比Scary耗电
Hotplug
基于Ondemand,有性能需求直接最高,没性能需求直接最低
优点:简单粗暴,还算平衡
缺点:性能需求属于中度的情何以堪...
Minmax
基于SmartassV2改进
优点:比SmartassV2好的性能
缺点:比SmartassV2耗电
Badass
只能用于多核CPU,分开控制单个CPU核心
优点:节省资源,耗电和性能较平衡
缺点:对内核要求苛刻,稳定系欠佳
Pegasusq / Pegasusd
源自Samsung Exynos,单独调控单个CPU核心(资料不足)
优点:理论上耗电性能较平衡
缺点:不确定与其他芯片的兼容性,不确定三星芯片发热相对较大是否与此有关
MSM-DCVS
高通Krait核心芯片独有(资料不足)
优点:据说可以用低功率获得高性能
缺点:高通=睾痛(undefined开玩笑的)。