SCARA机器人内模控制方法_赵登步_白瑞林_李新
scara机器人组成单元基本功能、操作方法及常用指令
scara机器人组成单元基本功能、操作方法及常用指令Scara机器人(Selective Compliance Assembly Robot Arm,选择性顺应组装机器人)是一种常用于组装、搬运、喷涂等应用的工业机器人。
其组成单元、基本功能、操作方法和常用指令可以根据具体的Scara机器人型号和制造商有所不同,但通常包括以下方面:1. 组成单元Scara机器人通常由以下几个主要组成单元构成:•机械臂:包括关节和连接杆,负责执行各种运动任务。
•控制器:用于控制机械臂的动作,接收和解释指令。
•传感器:可以包括位置传感器、力传感器、视觉传感器等,用于感知和反馈机器人的工作状态。
•末端执行器:可以是夹爪、吸盘、喷涂器等,用于与工作环境进行交互。
2. 基本功能Scara机器人的基本功能包括:•运动控制:控制机械臂执行直线运动、圆弧运动等。
•路径规划:规划机械臂的运动路径,以满足特定任务的需求。
•姿态控制:控制机械臂的末端姿态,使其适应不同的工作场景。
•力控制:通过力传感器等实现对机械臂的力反馈控制,以适应不同的力需求。
3. 操作方法Scara机器人的操作通常包括以下步骤:1. 启动机器人:打开电源,启动机器人系统。
2. 设定工作参数:包括工作速度、工作路径、姿态等参数。
3. 程序编写:编写机器人的控制程序,可以使用特定的编程语言或图形化编程界面。
4. 加载程序:将编写好的程序加载到机器人的控制器中。
5. 手动操作:通过手动操纵,教导机器人执行某个任务,记录相关的路径和姿态。
6. 自动运行:根据编写好的程序,机器人可以自动执行任务。
4. 常用指令Scara机器人的编程语言和指令集可能因制造商而异,但通常会包括以下一些常见的指令:•运动指令:包括直线运动指令、圆弧运动指令等。
•速度控制指令:设置机械臂的运动速度。
•力控制指令:控制机械臂的力传感器,实现力反馈控制。
•条件判断指令:实现根据特定条件执行不同的动作。
SCARA 工业机器人

SCARA 工业SCARA 工业范本:1. 引言:SCARA(Selective Compliance Assembly Robot Arm)是一种常见的工业,广泛应用于装配线和包装线等自动化生产过程中。
本文档旨在提供详细的说明和指导,帮助用户了解和操作 SCARA 工业。
2. 概述:2.1 特点:在这个章节中,将详细介绍 SCARA 的特点,如动作灵活性、精度和重复性等。
2.2 结构:这一部分将描述 SCARA 的结构和组成部分,包括基座、手臂、关节和末端执行器等。
3. SCARA 的工作原理:3.1 运动自由度:在这一章节中,将讲解 SCARA 的运动自由度,包括水平移动、垂直移动和旋转运动等。
3.2 控制系统:这一部分将介绍 SCARA 的控制系统,包括传感器和控制器等。
4. SCARA 的安装与设置:4.1 安装:这一章节将详细说明 SCARA 的安装步骤,包括基座的固定和调整等。
4.2 环境配置:这一部分将介绍 SCARA 在工作环境中的配置要求,如光照和温度等。
5. SCARA 的编程与操作:5.1 编程方式:在这一章节中,将介绍 SCARA 的编程方式,包括在线编程和离线编程等。
5.2 操作指南:这一部分将提供 SCARA 的操作指南,包括启动、关机、手动操作和自动运行等。
6. SCARA 的维护与故障排除:6.1 常规维护:在这一章节中,将描述 SCARA 的常规维护工作,如清洁和润滑等。
6.2 故障排除:这一部分将提供一些常见故障的排除方法,并给出相应的故障代码和解决方案。
7. 附录:7.1 附加设备:这一章节将列出可能与 SCARA 配套使用的附加设备,如夹具和传感器等。
7.2 附录二:在这个附录中,将提供 SCARA 的相关图纸和电气接线图等技术资料。
8. 法律名词及注释:本文档所涉及的法律名词和注释将根据需要进行添加。
9. 结束语:本文档涉及附件,请参考附件部分。
本文所涉及的法律名词及注释,请参考法律名词及注释部分。
scara机器人各组成单元基本功能、操作方法及常用指令

一、scara机器人各组成单元基本功能1. 前置设备组成:scara机器人通常由基座、臂部、手部和控制系统组成。
基座用于支撑整个机器人,臂部和手部负责执行各项任务,控制系统则是整个机器人的“大脑”。
基础设备的设计和功能会直接影响机器人的性能和适用范围。
2. 机械臂:scara机器人通常使用具有水平关节的机械臂,使得机械臂在平面内能够高效地执行各项任务。
机械臂的关节灵活度和稳定性是其基本功能,直接影响着机器人的精准度和稳定性。
3. 手部夹具:scara机器人手部通常配有夹具,用于抓取、移动和放置物体。
夹具的设计和功能对机器人的灵活性和适用性有着重要影响,不同类型的夹具可以使机器人适用于不同的任务场景。
4. 控制系统:scara机器人的控制系统可以通过编程来指导机器人执行各种任务,包括移动、抓取、放置等。
控制系统的智能化程度和稳定性对于机器人的操作效率和准确性有着重要影响。
二、scara机器人的操作方法1. 编程操作:scara机器人通常可以通过编程来指导执行任务,编程可以采用代码编写、图形化编程等不同方式。
编程操作需要对机器人的控制系统有较深的了解,适用于对机器人有一定了解或需要执行复杂任务的场景。
2. 手动操作:scara机器人也可以通过手动操作来执行任务,手动操作通常可以通过操控面板、遥控器等方式进行。
手动操作简单直观,适用于对机器人不太了解或执行简单任务的场景。
三、scara机器人的常用指令1. 移动指令:机器人移动是其最基本的操作之一,常用的移动指令包括直线移动、旋转移动等。
通过移动指令可以使机器人达到指定位置,执行相应任务。
2. 夹取指令:夹取是机器人常见的操作之一,通过夹取指令可以使机器人抓取目标物体并将其移动至指定位置。
3. 放置指令:放置是机器人的另一常见操作,通过放置指令可以使机器人将目标物体放置到指定位置。
四、scara机器人总结与个人观点总体来看,scara机器人作为自动化生产设备,在工业制造和物流领域有着广泛的应用。
SCARA机器人模糊自适应滑模控制
滑模控制策略。设计了一种非奇异的快速终端滑模面, 可在任意初始状态下收敛到平衡点; 改进滑模控制的趋近 律, 在保证快速趋近的同时可有效抑制抖振, 并采用双曲正切函数代替传统的符号函数, 有效地消除了高频抖振。 采用模糊控制调节趋近律参数, 改善初始状态误差过大时引起的力矩冲击问题; 基于 SCARA 机器人模型仿真实验 表明, 实验结果跟踪性能良好, 输出力矩平滑。 关键词: 轨迹跟踪控制; 模糊控制; 滑模面; 趋近律; 抖振 文献标志码: A 中图分类号: TP242.2 doi: 10.3778/j.issn.1002-8331.1311-0178
49
提出了一种新的指数滑模面, 加快了系统沿滑模面的收 敛速度。 Xinghuo Yu 等人设计了一种快速终端滑模
[7]
面, 实现了初始状态远离滑模面的快速收敛, 但是存在 奇异性。文献 [8] 设计了一种改进型的积分滑模面改善 系统的跟踪速度和超调量。另一方面需要设计合理的 趋近律: 高为炳 [9]提出了趋近律的概念, 为缩短趋近过程 时间以及削弱抖振提供了一个有效的方法。 Charles J[10] 等人在指数趋近律的基础上, 设计了一函数代替恒定趋 近系数, 根据误差大小动态调节趋近系数; 王燕 [11] 等提 出了一种改进趋近律的快速非奇异终端滑模控制策 略。席雷平 [12] 等提出了一种模糊幂次趋近律, 在保证抖 振抑制效果的前提下提高了系统的趋近速度。梅红 [13] 等提出了一种新的双幂次趋近律, 使系统在趋近过程中 有较高的速度, 并消除了传统滑模的固有抖振。 本文从滑模控制器的滑模面和趋近律两个方面入 手, 对 SCARA 机器人滑模控制系统进行了设计。针对 快速终端滑模面的奇异性进行改进, 设计了一种非奇异 的快速终端滑模面; 对趋近律进行了改进, 同时采用双 曲正切函数替代传统的符号函数, 有效地消除了抖振; 通过自适应模糊控制调节趋近律参数, 改善了初始状态 力矩冲击问题。
SCARA机器人的运动控制分析与计算
I SSN1008-9446承德石油高等专科学校学报第20卷第1期,2018年2月C N13-1265/T E Journal of Chengde Petroleum College Y o l.20,N〇.1,F e b. 2018SCARA机器人的运动控制分析与计算刘慕双,杨荣章,赵瑶瑶(承德石油高等专科学校机械工程系,河北承德067000)摘要:介绍了S C A R A机器人的结构及运动控制方法,采用数学分析方法得到了工业控制计算机向伺服电机驱动器发出脉冲的SC A R A机器人的控制方式,分析了伺服电机驱动S C A R A机器人的运动规律,并且得到了SC A R A机器人手腕参考点的位置坐标与工业控制计算机发出脉冲数的数学关系式。
为设计开发S C A R A机器人提供了运动控制逆解及运动范围。
关键词!SC A R A;运动;控制;分析中图分类号:TP242 文献标志码:A文章编号=1008-9446(2018)01-0018-03Motion Control Analysis and Calculation of SCARA RobotLIU Mu-shuang,YANG Rong-zhang,ZHAO Yao-yao(Department of Mechanical Engineering,Chengde Petroleum College,Chengde067000,Hebei,China)A b stract:The paper introduces the structure of SCARA robot and analyses the contrIPC sends pulsing signals to servo drives and the motion law that servo also obtains the mathematical relationship between the position coordinates of Selective ComplianceAssembly Robot Arm’s reference points and the number of pulse sent by IPC.Key w ords:SCA RA;motion;control;analysis近年来,世界工业生产进人到了智能制造时代。
基于ARM的SCARA机器人控制系统的设计与实现
巨 } 一
—
图3 S 3 C 4 4 B O X 同A D S 7 8 4 3 的 连 接 电 路
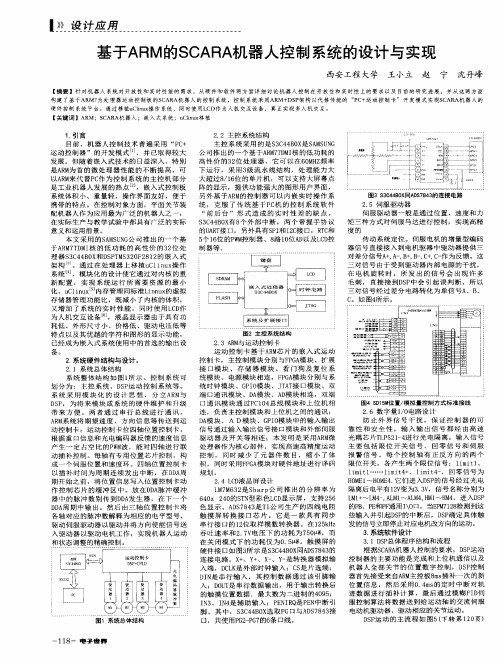
2 . 5 伺 服 驱 动 器 伺 服 驱动 器 一 般 是 通 过 位 置 、 速 度 和 力 矩 三 种 方 式 对 伺 服 马 达 进 行 控 制 ,实 现 高 精 度 的 传 动 系 统 定 位 。伺 服 电 机 的 增 量 型 编 码 器 信 号 直 接 接 入 到 电 机 驱 器 中 驱 动 器 提 供 三 对 差 分 信 号A + , A 一 , B + , B 一 , c + , C 一 作 为 反馈 。 这 三 对 信 号 由于 受 到 驱 动 器 内 部 电 源 的干 扰 , 在 电机 旋 转 时 , 所 发 出 的 信 号 会 出 现 许 多 毛 刺 ,直接接  ̄ U D S P 中会 引 起 误 判 断 ,所 以 三 对 信 号 经 过 差 分 电路 转 化 为 单 信 号A 、B、 c 。如 图4 所示 。
【关键 词 】ARM;S C AR A机 器 人 ;嵌 入 武 系统 ;u C l i n u x 移 植
1 . 引 言
目前 , 机 器 人 控 制 技 术 普 遍 采 用 “ P C + 运 动 控 制 器 ” 的开 发 模 式 …, 并 已取 得 较 大 发 展 。但 随 着 嵌 入 式 技 术 的 曰益 深 入 , 特 别 是A R M 为 首 的 微 处 理 器 性 能 的 不 断 提 高 , 可 以A R M 来代 替P c 作 为 控 制 系 统 的 主 控 机 部 分 是 工 业 机 器 人 发 展 的 热 点 , 嵌 入 式 控 制 板 系 统 体 积 小 、 重 量 轻 , 操 作 界 面 友 好 , 便 于 携 带 的特 点 。 在 控 制 对 象 方 面 ,平 面 关 节 装 配机器 人作为应用最 为广泛的机器人 之一 , 在 实 际 生 产 与 教 学 试 验 中 部 具 有 广 泛 的 实 际 意义和运用前景 。 本 文采用 的S A M S U N G 公 司 推 出 的 一 个 基 于A R M 7 T D M I 核 的低 功耗 的 高性 价 的3 2 位 处 理器 s 3 c 4 4 B O x 和D s P T M s 3 2 O F 2 8 1 2 的 嵌 入 式 架构 。通过 在处 理器上 移植u C l i n u x 操 作 系 统 J ,模 块 化 的设 计 使 它 通 过 对 内 核 的重 新 配 置 , 实 现 系 统 运 行 所 需 要 资 源 的 最 小 化 。u C 1 i n u x 内存 管 理 同标 准 L i n n u x 的虚 拟 存储 器管理功 能比,既减小 了内核的体积 , 又增 加 了 系 统 的 实 时 性 能 。 同 时 使 用 I C D 作 为 人 机 交 互 设 备 ,液 晶 显 示 器 由 于 具 有 功 耗 低 、 外 形 尺 寸 小 、 价 格 低 、驱 动 电压 低 等 特 点 以 及 其 优 越 的 字 符 和 图形 的 显 示 功 能 , 已经 成 为 嵌 入 式 系 统 使 用 中 的 首 选 的 输 出设
SCARA
摘
一
要: 为使选择顺应性装配机器手臂 ( S C A R A) 机器人运行点对 点运动轨迹 时 , 连续平 滑且运行 时间最 优 , 提出 种 基 于 时 滞 指 数 函 数 的 速 度 轨 迹 规划 方 法 。利 用 执 行 器 工 作 时 的 限制 条 件 获 取 时 间增 益 , 经 运 动 学 逆 解 获 得 机
较优 。
关 键 词 :选 择 顺 应 性 装 配 机 器 手 臂 机 器 人 ; 轨 迹规 划 ; S形 速度 曲线 ; 指 数 函数 速度 曲线 ; 点 对 点 运 动 中文 引 用 格 式 : 赵登 步 , 白瑞 林 , 沈程慧. S C AR A 机器人 点对 点运 动轨 迹规 划方 法 [ J ] . 计 算机 工程 , 2 0 1 5 , 4 1 ( 8 ) :
S C ARA Ro b o t [ J ] . C o mp u t e r E n g i n e e r i n g, 2 0 1 5 , 4 1 ( 8 ): 3 0 6 — 3 1 2 .
T r a j e c t o r y P l a n n i n g Me t h o d o f P o i n t ・ t o - P o i n t Mo t i o n f o r S CAR A Ro b o t
ZHA O De ng b u , BA I Ru i l i n , SHEN Ch e n g h ui , LI Xi n
( 1 . Ke y La b o r a t o r y o f Ad v a n c e d P r o c e s s Co n t r o l f o r Li g h t I n d u s t r y, Mi n i s t r y o f E d u c a t i o n, J i a n g n a n Un i v e r s i t y, Wu x i 2 1 4 1 2 2, Ch i n a ;2 . Wu x i Xi n j e E l e c t r o n i c Co . ,Lt d . , Wu x i 2 1 4 0 7 2, Ch i n a )
基于指数函数的SCARA机器人PTP轨迹规划[发明专利]
![基于指数函数的SCARA机器人PTP轨迹规划[发明专利]](https://img.taocdn.com/s3/m/213a1fe816fc700abb68fcee.png)
专利名称:基于指数函数的SCARA机器人PTP轨迹规划专利类型:发明专利
发明人:白瑞林,赵登步,吉峰
申请号:CN201410339396.2
申请日:20140714
公开号:CN104090492A
公开日:
20141008
专利内容由知识产权出版社提供
摘要:本发明提供了一种基于指数函数的SCARA机器人PTP轨迹规划方法,在保证其速度曲线、加速度曲线和加加速度曲线平滑和连续的情况下使运动轨迹时间最优。
具有公式简单、计算量小的优点。
首先建立SCARA机器人运动学模型,然后根据目标位姿求取各关节位移,随后根据需要运动的关节空间位移求取延时时间T;由执行器工作时的限制条件获取时间增益α;最后根据获得的延时时间和时间增益确定指数函数速度轨迹曲线完成规划。
申请人:江南大学,无锡信捷电气股份有限公司
地址:214122 江苏省无锡市蠡湖大道1800号江南大学
国籍:CN
更多信息请下载全文后查看。
SCARA机器人动力学参数辨识及轨迹跟踪控制方法研究
SCARA机器人动力学参数辨识及轨迹跟踪控制方法研究SCARA机器人动力学参数辨识及轨迹跟踪控制方法研究一、引言SCARA(Selective Compliance Assembly Robot Arm)机器人是一种常见的工业机器人,具有高刚性和高精度的特点,在装配、焊接、喷涂等工业领域中得到广泛应用。
为了实现机器人的精确控制,研究机器人的动力学参数辨识和轨迹跟踪控制方法显得尤为重要。
二、动力学参数辨识方法机器人的动力学参数辨识是指通过实验或模型计算来确定机械臂的动力学参数,包括质量、惯性矩阵和关节摩擦力等。
常用的参数辨识方法有逆动力学方法、最小二乘法和辨识模型拟合法等。
1.逆动力学法逆动力学法是一种基于测量输入输出信号的方法,通过测量机器人的位置、速度和加速度等信息,利用动力学方程求解未知参数。
该方法需要精确的测量设备和较高的计算能力,但可以得到较精确的参数估计结果。
2.最小二乘法最小二乘法是一种统计学中常用的参数估计方法,通过最小化实际输出值与模型预测值之间的差异来确定动力学参数的估计值。
该方法不需要测量输入信号,但需要对机器人的动力学方程进行显式建模,且对噪声敏感。
3.辨识模型拟合法辨识模型拟合法是一种基于数据采集的非参数辨识方法,通过采集机器人在不同工作空间中的输入输出数据,利用神经网络、遗传算法等拟合方法来确定动力学参数。
该方法不需要对机器人的动力学方程进行显式建模,有较好的适用性。
三、轨迹跟踪控制方法轨迹跟踪控制是指将机器人的末端执行器按照给定的轨迹进行精确控制,并实现高精度的姿态和位置跟踪。
常用的轨迹跟踪控制方法有PID控制、模型预测控制和自适应控制等。
1.PID控制PID控制是一种经典的反馈控制方法,通过比较机器人的实际运动状态与期望轨迹来调整控制量,使机器人能够跟踪给定轨迹。
PID控制简单易实现,但对于非线性系统和参数变化较大的系统效果较差。
2.模型预测控制模型预测控制是一种基于系统状态预测的控制方法,通过建立机器人的数学模型来预测未来一段时间的系统状态,并根据期望轨迹进行优化控制。
一种基于改进二次型迭代学习控制的SCARA机器人轨迹跟踪控制方法[发明专利]
![一种基于改进二次型迭代学习控制的SCARA机器人轨迹跟踪控制方法[发明专利]](https://img.taocdn.com/s3/m/a935a66d83d049649a665809.png)
专利名称:一种基于改进二次型迭代学习控制的SCARA机器人轨迹跟踪控制方法
专利类型:发明专利
发明人:叶凌箭,朱敏峰,马修水,沈非凡,李英道,钟伟红,李园申请号:CN201911163254.4
申请日:20191125
公开号:CN111872933A
公开日:
20201103
专利内容由知识产权出版社提供
摘要:本发明提供了一种基于改进二次型迭代学习控制的(QILC)的SCARA工业机器人的鲁棒控制方法,相比与原有的QILC算法,本发明将速度误差项加入优化方程中,从而构造得到新的优化方程,通过求解优化方程得到下一个批次的控制量。
此外,实际应用中,通常无法获得精确的系统模型,本发明提出将UKF和改进的QILC算法相结合,同时估计系统不确定参数和系统状态,并提出一种动态权重矩阵的设计方法,加快收敛速度,实现鲁棒的轨迹跟踪控制。
为了抑制实时扰动和噪声的影响,本发明结合PD反馈控制,在改进QILC算法计算得到的前馈控制量的基础上,加上实时反馈控制量,作为最后的控制力矩。
本发明提出的方法能够抑制系统模型不确定性参数的影响,并且相比与原有的QILC算法,具有更加快速的误差收敛性能和更良好的暂态性能,即使在系统参数不确定性和测量噪声存在的情况下,也能实现精确的轨迹跟踪,具有较好的鲁棒性和稳定性。
申请人:浙江大学宁波理工学院
地址:315100 浙江省宁波市鄞州区首南街道高教园区钱湖南路1号
国籍:CN
代理机构:宁波甬致专利代理有限公司
代理人:李迎春
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 2 2 1 D22 = 1 3 m2 l2 + m3l2 + m4 l2 + 3 m4 r
2 2 1 D33 = m3 + m4,D44 = 1 2 m4 r , D14 = − 2 m4 r
2 2 1 D12 = 1 3 m2l2 + 2 m2 l1l2C2 + m3l2 + m3l1l2 C2 2 + m4l22 + m4l1l2C2 + 1 2 m4 r
C (S)
D (S) U(S)
R(S)
+
+
Q(S)
P(S)
+
+
Y(S)
-
+
Z(S)
M(S)
(2)
图 3 等效反馈控制系统结构
图中虚线框住部分为反馈控制器 C ( S ) ,
由上式可知要得到系统动力学模型,需要测 量各关节质量和长度;由于测量误差是不可避免 的,必然导致所建立的模型与实际的模型之间存 在误差,而且是没办法直接测量的,需要进行估 测,所以所建立的模型是不精确的模型;我们把 这种带有测量误差的模型称为估计模型,分别用 符号 Hˆ、Cˆ、Gˆ 来表示。
基金项目:江苏高校优势学科建设工程资助项目(PAPD) ;江苏省产学研前瞻性联合研究项目(BY2012056) 。 作者简介: 赵登步(1988-),男,硕士研究生,研究方向为检测技术与自动化装置;白瑞林(1955-),男,教授,博导,研究领域为机器视 觉与智能系统;李新(1970-),男,工程师,研究领域为工业自动化系统与装备。E-mail:852434038@
态控制。对此很多研究者进行了大量的研究。 Le Tien Dung [5]针对双柔性关节机器人,设计 了在线估计重力的自适应算法,实现了基于在线重 力补偿的PD控制。 由于在线估计重力补偿项会加重 控制器实时计算的负担, 为此, Alessandro De Luca [6] 采用事先计算出的固定重力项作为补偿,采用增 加反馈增益来减小稳态误差。但有时期望轨迹不是 一个固定点,而是一条随时间变化的连续轨迹,这 时再用 PD 控制是不能完成连续时变轨迹的跟踪任 务。霍伟[7]采用计算力矩法来控制机器人,先在内 控制回路中引入非线性补偿,使机器人化为更易于 控制的线性定常系统。但是计算力矩法需要知道机 器人的准确模型,当模型计算有误差时,控制精度 将受到很大的影响。为了解决这一问题 Charles J[8]
2
Computer Engineering and Applications 计算机工程与应用
提出了一种采用指数趋近律的滑模变结构控制方 法。但是滑膜本身具有抖动问题。Xiao jiang Mu[9] 采用一种自适应模糊滑模控制方法,它保留了自适 应控制、模糊控制和滑模控制的优点,通过模糊控 制自适应调节滑模控制增益,有效消除了滑模控制 [10] 中的抖振问题。胡盛斌,陆敏恂 用双模糊自适应 地估计滑膜切换增益和调整滑膜平面切换控制项 [11] [12] 来消除抖动提高增益。此外,谢箭 、张宇 和吾 [13] 勃 应用神经网络和滑膜控制相结合的方法进行 控制同样可以良好的跟踪效果和较高的控制精度。 但此算法控制结构复杂,算法计算时间长,有时需 要调节多个参数才能达到控制要求。 基于此,本文提出一种新的机器人控制方法, 该方法运用内模控制原理解决 SCARA 机器人在外 界干扰和模型不精确情况下的轨迹跟踪问题;并将 控制结果与自适应模糊滑模控制进行比较,发现不 仅参数调节简单,而且控制效果更优越。 2 SCARA 机器人的动力学数学模型 对于一个 n 关节机器人系统,其动力学方程可 以写成如下二阶非线性形式:
赵登步 1, 白瑞林 1, 李新 2 ZHAO Dengbu1, BAI Ruilin1,LI Xin2 1.江南大学 轻工过程先进控制教育部重点实验室, 信息与控制实验教学中心,江苏 无锡 214122 2.无锡信捷电气有限公司,江苏 无锡 214072 1. Key Laboratory of Advanced Process Control for Light Industry (Ministry of Education), Information and Control Experiment Teaching Center, Jiangnan University, Wuxi, 214122,PR China 2. Xinje Electronic Co., Ltd.,Jiangsu Wuxi 214072,China ZHAO Dengbu, BAI Ruilin, LI Xin. Design of SCARA robot controller based on internal model Abstract:In order to make the SCARA robot has excellent tracking performance trajectory in the external interference situation, a method is proposed using the internal model control theory to design the robot controller.Firstly, Using Lagrangian method to establish SCARA robot dynamics model, and then estimating it as the internal model control model. Afterwards,Selecting the mode filter f(S) to design the internal model controller Q(S)which satisfies the condition of zero steady-state error.Finally, The SCARA robot control law is derived under different input signal.Through the simulation, Comparing it with the adaptive fuzzy sliding mode control method,The results show that, The proposed method has high precision tracking, strong anti-interference ability, and the controller parameter regulation is simple. Key words:SCARA; robot; IMC; internal model control; Disturbance; unaccurate model 摘 要:为了使 SCARA 机器人在外界干扰和模型不精确的情况下具有优良的轨迹跟踪性能,提出一种基于 内模控制原理设计 SCARA 机器人控制器的方法。首先采用拉格朗日方法获得 SCARA 机器人动力学模型, 将其作为内模控制的估计模型;随后,选择内模滤波器 f(S)设计内模控制器 Q(S),使其满足稳态误差为零的 条件,最后通过推导得出不同输入信号下的 SCARA 机器人控制律。通过仿真,将其与自适应模糊滑模控制 方法进行对比分析,结果表明所提出的方法轨迹跟踪精度高,抗干扰能力强,控制器参数调节简单。 关键词: SCARA;机器人;IMC;内模控制;扰动;不精确模型 doi:10.3778/j.issn.1002-8331.1403-0328 文献标志码: A 中图分类号: TP242
C (S ) =
Q( S ) 1 − Q( S ) M ( S )
(3)
系统的闭环输出为:
2 1 D21 = 1 3 m2l2 + 2 m2 l1l2C2 + m3l2 + m3l1l2 C2 2 + m4l22 + m4l1l2C2 + 1 2 m4 r 2 2 2 1 1 D24 = − 1 2 m4 r , D41 = − 2 m4 r ,D42 = − 2 m4 r 2 D122 q 2 0 0 ⎤ ⎡ 2 D112 q ⎢D q 0 0 0⎥ 211 1 ⎢ ⎥ ) = C ( q, q ⎢ 0 0 0 0⎥ ⎢ ⎥ 0 0 0⎦ ⎣ 0 1 D112 = −( m 2 + m3 + m 4 )l1l2s 2 2 1 D122 = −( m 2 + m3 + m 4 )l1l2s 2 2 1 D 211 =( m 2 + m3 + m 4 )l1l2s 2 2 0 ⎡ ⎤ ⎢ ⎥ 0 ⎢ ⎥ G(q) = ⎢ −(m 3 + m 4 ) g ⎥ ⎢ ⎥ 0 ⎣ ⎦ 其中, mi 表示各连杆的质量, li 表示各连杆长
利用拉格朗日函数对 SCARA 机器人进行动力 学建模[14],得到(1)式的各项参数如下所示:
赵登步,白瑞林: SCARA 机器人内模控制方法
3
0 D14 ⎤ ⎡ q1 ⎤ ⎡τ 1 ⎤ ⎡ D11 D12 ⎢τ ⎥ ⎢ D ⎥ ⎢ ⎥ ⎢ 2 ⎥ = ⎢ 21 D22 0 D24 ⎥ ⎢q 2 ⎥ ⎢τ 3 ⎥ ⎢ 0 0 D33 0 ⎥ ⎢ q3 ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ q4 ⎦ ⎣τ 4 ⎦ ⎣ D41 D42 0 D44 ⎦ ⎣ 2 1q 2 + D122 q 2 ⎡ 2D112 q ⎤ ⎢ ⎥ 2 1 D211q ⎢ ⎥ + ⎢ −(m3 + m 4 )g ⎥ ⎢ ⎥ 0 ⎣ ⎦
n
n
为关节控制力矩矢量。 SCARA 机器人的结构如图 1 所示。
2
z
l2
z
1
l1
x x
r2
y
z
y