卡尔曼滤波算法代码总结(20150311)
卡尔曼滤波算法python

卡尔曼滤波是一种高效的递归滤波器,它利用系统状态方程和测量方程,以及系统噪声和测量噪声的统计特性,对系统状态进行最优估计。
在Python中实现卡尔曼滤波算法可以使用以下代码:python复制代码import numpy as npdef kalman_filter(x_true, P_true, Q, R, H, x_init, P_init):'''卡尔曼滤波算法实现参数:x_true: 真实值,numpy数组P_true: 真实值协方差,numpy数组Q: 系统噪声协方差,numpy数组R: 测量噪声协方差,numpy数组H: 测量矩阵,numpy数组x_init: 初始估计值,numpy数组P_init: 初始估计值协方差,numpy数组返回:x_hat: 估计值,numpy数组P_hat: 估计值协方差,numpy数组'''# 初始化x_hat = x_initP_hat = P_initfor k in range(len(x_true)):# 预测x_minus = x_hat - np.dot(H, x_true[k])P_minus = P_hat + np.dot(H, np.dot(P_true, H.T)) + Q# 更新S = R + np.dot(H, np.dot(P_minus, H.T))K = np.dot(P_minus, H.T) / Sx_hat = x_minus + np.dot(K, (np.dot(H, x_true[k]) - np.dot(H, x_hat)))P_hat = P_minus - np.dot(K, np.dot(H, P_minus))# 计算估计值和协方差矩阵x_hat = np.append(x_hat, x_true[k])P_hat = np.append(P_hat, P_true[k])return x_hat, P_hat其中,x_true表示真实值,P_true表示真实值协方差,Q表示系统噪声协方差,R表示测量噪声协方差,H 表示测量矩阵,x_init表示初始估计值,P_init表示初始估计值协方差。
卡尔曼滤波算法代码总结(20150311)

/***************************************************************** **********//* kalman.c *//* 1-D Kalman filter Algorithm, using an inclinometer and gyro *//* Author: Rich Chi Ooi *//* Version: 1.0 *//* Date:30.05.2003 *//* Adapted from Trammel Hudson() *//* ------------------------------- *//* Compilation procedure: *//* Linux *//* gcc68 -c XXXXXX.c (to create object file) *//* gcc68 -o XXXXXX.hex XXXXXX.o ppwa.o *//*Upload data : *//* ul *//***************************************************************** **********//* In this version: *//***************************************************************** **********//* This is a free software; you can redistribute it and/or modify *//* it under the terms of the GNU General Public License as published *//* by the Free Software Foundation; either version 2 of the License, *//* or (at your option) any later version. *//* *//* this code is distributed in the hope that it will be useful, *//* but WITHOUT ANY WARRANTY; without even the implied warranty of */ /* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the *//* GNU General Public License for more details. *//* *//* You should have received a copy of the GNU General Public License *//* along with Autopilot; if not, write to the Free Software *//* Foundation, Inc., 59 Temple Place, Suite 330, Boston, *//* MA 02111-1307 USA *//***************************************************************** **********/#include <math.h>#include "eyebot.h"/** The state is updated with gyro rate measurement every 20ms* change this value if you update at a different rate.*/static const float dt = 0.02;/** The covariance matrix.This is updated at every time step to* determine how well the sensors are tracking the actual state.*/static float P[2][2] = {{ 1, 0 },{ 0, 1 }};/** Our two states, the angle and the gyro bias.As a byproduct of computing * the angle, we also have an unbiased angular rate available.These are* read-only to the user of the module.*/float angle;float q_bias;float rate;/** The R represents the measurement covariance noise.R=E[vvT]* In this case,it is a 1x1 matrix that says that we expect* 0.1 rad jitter from the inclinometer.* for a 1x1 matrix in this case v = 0.1*/static const float R_angle = 0.001 ;/** Q is a 2x2 matrix that represents the process covariance noise.* In this case, it indicates how much we trust the inclinometer* relative to the gyros.*/static const float Q_angle = 0.001;static const float Q_gyro = 0.0015;/** state_update is called every dt with a biased gyro measurement* by the user of the module. It updates the current angle and* rate estimate.** The pitch gyro measurement should be scaled into real units, but* does not need any bias removal. The filter will track the bias.** A = [ 0 -1 ]* [ 0 0 ]*/void stateUpdate(const float q_m){float q;float Pdot[4];/* Unbias our gyro */q = q_m - q_bias;//当前角速度:测量值-估计值/** Compute the derivative of the covariance matrix* (equation 22-1)* Pdot = A*P + P*A' + Q**/Pdot[0] = Q_angle - P[0][1] - P[1][0]; /* 0,0 */Pdot[1] = - P[1][1]; /* 0,1 */Pdot[2] = - P[1][1]; /* 1,0 */Pdot[3] = Q_gyro; /* 1,1 *//* Store our unbias gyro estimate */rate = q;/** Update our angle estimate* angle += angle_dot * dt* += (gyro - gyro_bias) * dt* += q * dt*/angle += q * dt;//角速度积分累加到估计角度/* Update the covariance matrix */P[0][0] += Pdot[0] * dt;P[0][1] += Pdot[1] * dt;P[1][0] += Pdot[2] * dt;P[1][1] += Pdot[3] * dt;}/** kalman_update is called by a user of the module when a new* inclinoometer measurement is available.** This does not need to be called every time step, but can be if* the accelerometer data are available at the same rate as the* rate gyro measurement.** H = [ 1 0 ]** because the angle measurement directly corresponds to the angle * estimate and the angle measurement has no relation to the gyro * bias.*/void kalmanUpdate(const float incAngle){/* Compute our measured angle and the error in our estimate */ float angle_m = incAngle;float angle_err = angle_m - angle;//1.12 zk-H*xk_dot/** h_0 shows how the state measurement directly relates to* the state estimate.** H = [h_0 h_1]** The h_1 shows that the state measurement does not relate* to the gyro bias estimate. We don't actually use this, so* we comment it out.*/float h_0 = 1;/* const float h_1 = 0; *//** Precompute PH' as the term is used twice* Note that H[0,1] = h_1 is zero, so that term is not not computed */const float PHt_0 = h_0*P[0][0]; /* + h_1*P[0][1] = 0*/const float PHt_1 = h_0*P[1][0]; /* + h_1*P[1][1] = 0*//** Compute the error estimate:* (equation 21-1)** E = H P H' + R*/float E = R_angle +(h_0 * PHt_0);/** Compute the Kalman filter gains:* (equation 21-2)** K = P H' inv(E)*/float K_0 = PHt_0 / E;float K_1 = PHt_1 / E;/** Update covariance matrix:* (equation 21-3)** P = P - K H P* Let* Y = H P*/float Y_0 = PHt_0; /*h_0 * P[0][0]*/float Y_1 = h_0 * P[0][1];P[0][0] -= K_0 * Y_0;P[0][1] -= K_0 * Y_1;P[1][0] -= K_1 * Y_0;P[1][1] -= K_1 * Y_1;/** Update our state estimate:** Xnew = X + K * error** err is a measurement of the difference in the measured state* and the estimate state. In our case, it is just the difference* between the inclinometer measured angle and the estimated angle.*/angle += K_0 * angle_err;q_bias += K_1 * angle_err;}//现在智能小车上用的卡尔曼滤波算法。
卡尔曼滤波python代码
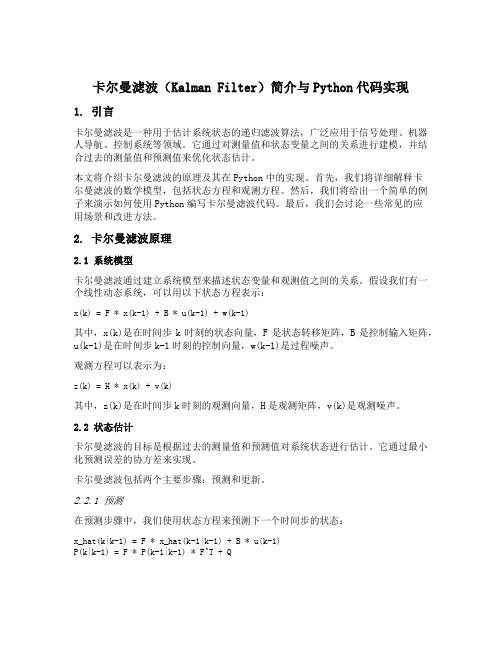
卡尔曼滤波(Kalman Filter)简介与Python代码实现1. 引言卡尔曼滤波是一种用于估计系统状态的递归滤波算法,广泛应用于信号处理、机器人导航、控制系统等领域。
它通过对测量值和状态变量之间的关系进行建模,并结合过去的测量值和预测值来优化状态估计。
本文将介绍卡尔曼滤波的原理及其在Python中的实现。
首先,我们将详细解释卡尔曼滤波的数学模型,包括状态方程和观测方程。
然后,我们将给出一个简单的例子来演示如何使用Python编写卡尔曼滤波代码。
最后,我们会讨论一些常见的应用场景和改进方法。
2. 卡尔曼滤波原理2.1 系统模型卡尔曼滤波通过建立系统模型来描述状态变量和观测值之间的关系。
假设我们有一个线性动态系统,可以用以下状态方程表示:x(k) = F * x(k-1) + B * u(k-1) + w(k-1)其中,x(k)是在时间步k时刻的状态向量,F是状态转移矩阵,B是控制输入矩阵,u(k-1)是在时间步k-1时刻的控制向量,w(k-1)是过程噪声。
观测方程可以表示为:z(k) = H * x(k) + v(k)其中,z(k)是在时间步k时刻的观测向量,H是观测矩阵,v(k)是观测噪声。
2.2 状态估计卡尔曼滤波的目标是根据过去的测量值和预测值对系统状态进行估计。
它通过最小化预测误差的协方差来实现。
卡尔曼滤波包括两个主要步骤:预测和更新。
2.2.1 预测在预测步骤中,我们使用状态方程来预测下一个时间步的状态:x_hat(k|k-1) = F * x_hat(k-1|k-1) + B * u(k-1)P(k|k-1) = F * P(k-1|k-1) * F^T + Q其中,x_hat(k|k-1)是在时间步k时刻的状态预测值,P(k|k-1)是状态协方差矩阵(描述状态估计误差的不确定性),Q是过程噪声的协方差矩阵。
2.2.2 更新在更新步骤中,我们使用观测方程来校正预测值:K(k) = P(k|k-1) * H^T * (H * P(k|k-1) * H^T + R)^(-1)x_hat(k|k) = x_hat(k|k-1) + K(k) * (z(k) - H * x_hat(k|k-1))P(k|k) = (I - K(k) * H) * P(k|k-1)其中,K(k)是卡尔曼增益(用于校正预测值),R是观测噪声的协方差矩阵,I是单位矩阵。
(完整word版)卡尔曼滤波算法(C--C++两种实现代码).docx

卡尔曼滤波算法实现代码C++实现代码如下:============================kalman.h================================//kalman.h: interface for the kalman class.////////////////////////////////////////////////////////////////////////#if!defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__INCLUDED_)#define AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__INCLUDED_#if_MSC_VER > 1000#pragma once#endif // _MSC_VER > 1000#include <math.h>#include "cv.h"class kalman{public :void init_kalman(int x, int xv, int y, int yv);CvKalman* cvkalman;CvMat* state;CvMat* process_noise;CvMat* measurement;const CvMat* prediction;CvPoint2D32f get_predict(float x, float y);kalman( int x=0, int xv=0, int y=0, int yv=0);//virtual ~kalman();};#endif // !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C 0__INCLUDED_)============================kalman.cpp================================#include "kalman.h"#include <stdio.h>*//* tester de printer toutes les valeurs des vecteurs/* tester de changer les matrices du noises */ /*replace state by cvkalman->state_post ??? */CvRandState rng;const double T = 0.1;kalman::kalman(int x, int xv, int y, int yv){cvkalman = cvCreateKalman( 4, 4, 0 );state = cvCreateMat( 4, 1, CV_32FC1 );process_noise = cvCreateMat( 4, 1, CV_32FC1 );measurement = cvCreateMat( 4, 1, CV_32FC1 );int code = -1;/* create matrix data */const float A[] = {1, T , 0, 0,0, 1, 0, 0,0, 0, 1, T,0, 0, 0, 1};const float H[] = {1, 0, 0, 0,0, 0, 0, 0,0, 0, 1, 0,0, 0, 0, 0};const float P[] = {pow(320,2), pow(320,2)/T, 0, 0,pow(320,2)/T, pow(320,2)/pow(T,2), 0, 0, 0, 0, pow(240,2), pow(240,2)/T,0, 0, pow(240,2)/T, pow(240,2)/pow(T,2) };const float Q[] = {pow(T,3)/3, pow(T,2)/2, 0, 0,pow(T,2)/2, T , 0, 0,0, 0, pow(T,3)/3, pow(T,2)/2,0, 0, pow(T,2)/2, T};const float R[] = {1, 0, 0, 0,0, 0, 0, 0,0, 0, 1, 0,0, 0, 0, 0};cvRandInit( &rng, 0, 1, -1, CV_RAND_UNI ); cvZero( measurement );cvRandSetRange( &rng, 0, 0.1, 0 );rng.disttype = CV_RAND_NORMAL; cvRand( &rng, state );memcpy( cvkalman->transition_matrix->data.fl, A, memcpy( cvkalman->measurement_matrix->data.fl, H, memcpy( cvkalman->process_noise_cov->data.fl, Q, memcpy( cvkalman->error_cov_post->data.fl, Psizeof (A));sizeof (H));sizeof (Q));, sizeof (P));memcpy( cvkalman->measurement_noise_cov->data.fl, R,sizeof (R));//cvSetIdentity( cvkalman->process_noise_cov, cvRealScalar(1e-5) );//cvSetIdentity( cvkalman->error_cov_post, cvRealScalar(1));//cvSetIdentity( cvkalman->measurement_noise_cov, cvRealScalar(1e-1) );/* choose initial state */state->data.fl[0]=x;state->data.fl[1]=xv;state->data.fl[2]=y;state->data.fl[3]=yv;cvkalman->state_post->data.fl[0]=x;cvkalman->state_post->data.fl[1]=xv;cvkalman->state_post->data.fl[2]=y;cvkalman->state_post->data.fl[3]=yv;cvRandSetRange( &rng, 0, sqrt(cvkalman->process_noise_cov->data.fl[0]), 0 );cvRand( &rng, process_noise );}CvPoint2D32f kalman::get_predict(float x, float y){/* update state with current position */state->data.fl[0]=x;state->data.fl[2]=y;/* predict point position *//* x'k=A鈥k+B鈥kP'k=A鈥k-1*AT + Q */cvRandSetRange( &rng, 0, sqrt(cvkalman->measurement_noise_cov->data.fl [0]), 0 );cvRand( &rng, measurement );/* xk=A?xk-1+B?uk+wk */cvMatMulAdd( cvkalman->transition_matrix, state, process_noise, cvkalman-> state_post );/* zk=H?xk+vk */cvMatMulAdd( cvkalman->measurement_matrix, cvkalman->state_post, meas urement, measurement );cvKalmanCorrect( cvkalman, measurement );float measured_value_x = measurement->data.fl[0];float measured_value_y = measurement->data.fl[2];const CvMat* prediction = cvKalmanPredict( cvkalman, 0 );float predict_value_x = prediction->data.fl[0];float predict_value_y = prediction->data.fl[2];return (cvPoint2D32f(predict_value_x,predict_value_y));}void kalman::init_kalman(int x, int xv, int y, int yv){state->data.fl[0]=x;state->data.fl[1]=xv;state->data.fl[2]=y;state->data.fl[3]=yv;cvkalman->state_post->data.fl[0]=x;cvkalman->state_post->data.fl[1]=xv;cvkalman->state_post->data.fl[2]=y;cvkalman->state_post->data.fl[3]=yv;}c 语言实现代码如下:#include "stdlib.h"#include "rinv.c"int lman(n,m,k,f,q,r,h,y,x,p,g)int n,m,k;double f[],q[],r[],h[],y[],x[],p[],g[];{ int i,j,kk,ii,l,jj,js; double *e,*a,*b;e=malloc(m*m* sizeof(double ));l=m;if (l<n) l=n;a=malloc(l*l*sizeof (double ));b=malloc(l*l*sizeof (double ));for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ ii=i*l+j; a[ii]=0.0;for (kk=0; kk<=n-1; kk++)a[ii]=a[ii]+p[i*n+kk]*f[j*n+kk];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ ii=i*n+j; p[ii]=q[ii];for (kk=0; kk<=n-1; kk++)p[ii]=p[ii]+f[i*n+kk]*a[kk*l+j];}for (ii=2; ii<=k; ii++){ for (i=0; i<=n-1; i++)for (j=0; j<=m-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=n-1; kk++)a[jj]=a[jj]+p[i*n+kk]*h[j*n+kk];}for (i=0; i<=m-1; i++)for (j=0; j<=m-1; j++){ jj=i*m+j; e[jj]=r[jj];for (kk=0; kk<=n-1; kk++)e[jj]=e[jj]+h[i*n+kk]*a[kk*l+j];}js=rinv(e,m);if (js==0)return (js);} { free(e); free(a); free(b);for (i=0; i<=n-1; i++)for (j=0; j<=m-1; j++){ jj=i*m+j; g[jj]=0.0;for (kk=0; kk<=m-1; kk++)g[jj]=g[jj]+a[i*l+kk]*e[j*m+kk];}for (i=0; i<=n-1; i++){ jj=(ii-1)*n+i; x[jj]=0.0; for(j=0; j<=n-1; j++)x[jj]=x[jj]+f[i*n+j]*x[(ii-2)*n+j];}for (i=0; i<=m-1; i++){ jj=i*l; b[jj]=y[(ii-1)*m+i]; for(j=0; j<=n-1; j++) b[jj]=b[jj]-h[i*n+j]*x[(ii-1)*n+j];}for (i=0; i<=n-1; i++){ jj=(ii-1)*n+i;for (j=0; j<=m-1; j++)x[jj]=x[jj]+g[i*m+j]*b[j*l];}if (ii<k){ for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=m-1; kk++)a[jj]=a[jj]-g[i*m+kk]*h[kk*n+j];if (i==j) a[jj]=1.0+a[jj];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; b[jj]=0.0;for (kk=0; kk<=n-1; kk++)b[jj]=b[jj]+a[i*l+kk]*p[kk*n+j];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=n-1; kk++)a[jj]=a[jj]+b[i*l+kk]*f[j*n+kk];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*n+j; p[jj]=q[jj];for (kk=0; kk<=n-1; kk++)p[jj]=p[jj]+f[i*n+kk]*a[j*l+kk];}}}free(e); free(a); free(b); return (js);}。
(整理)卡尔曼滤波简介及其算法MATLAB实现代码.
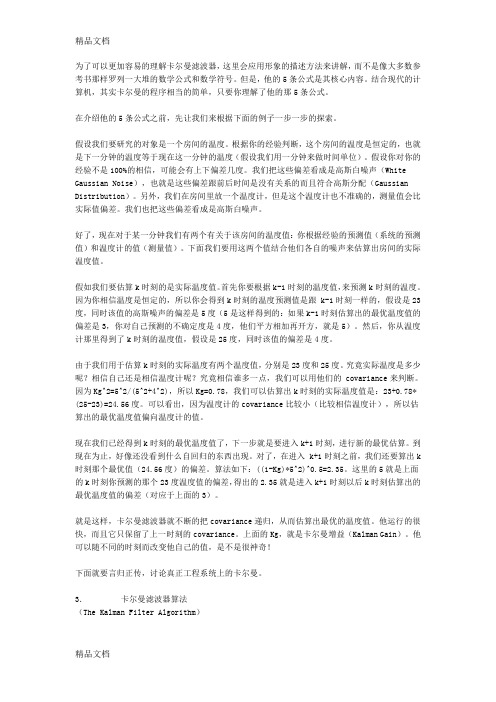
式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。式子1,2就是卡尔曼滤波器5个公式当中的前两个,也就是对系统的预测。
首先,我们先要引入一个离散控制过程的系统。该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:
X(k)=A X(k-1)+B U(k)+W(k)
再加上系统的测量值:
Z(k)=H X(k)+V(k)
上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。A和B是系统参数,对于多模型系统,他们为矩阵。Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。W(k)和V(k)分别表示过程和测量的噪声。他们被假设成高斯白噪声(White Gaussian Noise),他们的covariance分别是Q,R(这里我们假设他们不随系统状态变化而变化)。
现在我们有了现在状态的预测结果,然后我们再收集现在状态的测量值。结合预测值和测量值,我们可以得到现在状态(k)的最优化估算值X(k|k):
X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|
Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R)………(4)
现在我们已经得到k时刻的最优温度值了,下一步就是要进入k+1时刻,进行新的最优估算。到现在为止,好像还没看到什么自回归的东西出现。对了,在进入k+1时刻之前,我们还要算出k时刻那个最优值(24.56度)的偏差。算法如下:((1-Kg)*5^2)^0.5=2.35。这里的5就是上面的k时刻你预测的那个23度温度值的偏差,得出的2.35就是进入k+1时刻以后k时刻估算出的最优温度值的偏差(对应于上面的3)。
卡尔曼滤波 matlab代码

卡尔曼滤波matlab代码卡尔曼滤波Matlab 代码卡尔曼滤波是一种递归的状态估计算法,用于估计随时间变化的系统状态,它通过将过去的观测值与预测模型相结合,得出对当前状态的最优估计。
在Matlab中,我们可以利用内置函数或自己编写的函数来实现卡尔曼滤波算法。
首先,我们需要定义一个状态空间模型。
状态空间模型由状态方程和观测方程组成。
状态方程描述了系统状态如何从先前的状态和控制输入中演化到当前状态,观测方程描述了如何从系统状态中得出观测值。
在Matlab中,我们可以使用以下代码定义状态方程和观测方程。
matlab状态方程A = [1 1; 0 1]; 状态转移矩阵B = [0.5; 1]; 控制输入矩阵C = [1 0]; 观测矩阵Q = [0.1 0; 0 0.1]; 状态噪声协方差矩阵R = 1; 观测噪声方差观测方程sys = ss(A, B, C, 0);[K, P, E] = lqr(sys, Q, R); 最优控制器增益矩阵上述代码中,`A`是状态转移矩阵,表示系统状态如何从t-1时刻转移到t 时刻。
`B`是控制输入矩阵,表示控制输入如何影响系统状态的演化。
`C`是观测矩阵,用于将系统状态映射到观测值。
`Q`是状态噪声协方差矩阵,用于描述系统状态的不确定性。
`R`是观测噪声方差,用于描述观测值的不确定性。
接下来,我们可以利用卡尔曼滤波算法来估计系统状态。
在Matlab中,可以使用`kalman`函数来实现卡尔曼滤波。
matlab卡尔曼滤波x0 = [0; 0]; 初始状态估计P0 = eye(2); 初始估计误差协方差矩阵观测值t = 0:0.1:10;u = sin(t);w = sqrt(Q) * randn(size(t));v = sqrt(R) * randn(size(t));x = zeros(2, length(t));y = zeros(1, length(t));for k = 1:length(t)系统模型x(:, k+1) = A * x(:, k) + B * u(k) + w(:, k);y(:, k) = C * x(:, k) + v(:, k);end卡尔曼滤波x_hat = zeros(size(x));P = zeros(size(P0));for k = 1:length(t)预测x_hat(:, k+1) = A * x_hat(:, k) + B * u(k);P = A * P * A' + Q;更新K = P * C' / (C * P * C' + R);x_hat(:, k+1) = x_hat(:, k+1) + K * (y(:, k) - C * x_hat(:, k+1));P = (eye(2) - K * C) * P;end在上述代码中,`x0`和`P0`分别是初始状态估计和初始估计误差协方差矩阵。
(完整word版)卡尔曼滤波算法(C--C++两种实现代码)

卡尔曼滤波算法实现代码C++实现代码如下: ============================kalman.h================= =============== // kalman.h: interface for the kalman class. // ////////////////////////////////////////////////////////////////////// #if !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__IN CLUDED_) #define AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__INCLU DED_#if _MSC_VER > 1000 #pragma once #endif // _MSC_VER > 1000#include <math.h> #include "cv.h"class kalman { public: void init_kalman(int x,int xv,int y,int yv); CvKalman* cvkalman; CvMat* state; CvMat* process_noise; CvMat* measurement; const CvMat* prediction; CvPoint2D32f get_predict(float x, float y);kalman(int x=0,int xv=0,int y=0,int yv=0); //virtual ~kalman();};#endif // !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C 0__INCLUDED_)============================kalman.cpp=============== =================#include "kalman.h" #include <stdio.h>/* tester de printer toutes les valeurs des vecteurs */ /* tester de changer les matrices du noises */ /* replace state by cvkalman->state_post ??? */CvRandState rng; const double T = 0.1; kalman::kalman(int x,int xv,int y,int yv) {cvkalman = cvCreateKalman( 4, 4, 0 ); state = cvCreateMat( 4, 1, CV_32FC1 ); process_noise = cvCreateMat( 4, 1, CV_32FC1 ); measurement = cvCreateMat( 4, 1, CV_32FC1 ); int code = -1;/* create matrix data */ const float A[] = { 1, T, 0, 0, 0, 1, 0, 0, 0, 0, 1, T, 0, 0, 0, 1 };const float H[] = { 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0 };const float P[] = { pow(320,2), pow(320,2)/T, 0, 0, pow(320,2)/T, pow(320,2)/pow(T,2), 0, 0, 0, 0, pow(240,2), pow(240,2)/T, 0, 0, pow(240,2)/T, pow(240,2)/pow(T,2) };const float Q[] = { pow(T,3)/3, pow(T,2)/2, 0, 0, pow(T,2)/2, T, 0, 0, 0, 0, pow(T,3)/3, pow(T,2)/2, 0, 0, pow(T,2)/2, T };const float R[] = { 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0 }; cvRandInit( &rng, 0, 1, -1, CV_RAND_UNI );cvZero( measurement );cvRandSetRange( &rng, 0, 0.1, 0 ); rng.disttype = CV_RAND_NORMAL;cvRand( &rng, state );memcpy( cvkalman->transition_matrix->data.fl, A, sizeof(A)); memcpy( cvkalman->measurement_matrix->data.fl, H, sizeof(H)); memcpy( cvkalman->process_noise_cov->data.fl, Q, sizeof(Q)); memcpy( cvkalman->error_cov_post->data.fl, P, sizeof(P)); memcpy( cvkalman->measurement_noise_cov->data.fl, R, sizeof(R)); //cvSetIdentity( cvkalman->process_noise_cov, cvRealScalar(1e-5) ); //cvSetIdentity( cvkalman->error_cov_post, cvRealScalar(1)); //cvSetIdentity( cvkalman->measurement_noise_cov, cvRealScalar(1e-1) );/* choose initial state */state->data.fl[0]=x; state->data.fl[1]=xv; state->data.fl[2]=y;state->data.fl[3]=yv; cvkalman->state_post->data.fl[0]=x; cvkalman->state_post->data.fl[1]=xv; cvkalman->state_post->data.fl[2]=y; cvkalman->state_post->data.fl[3]=yv;cvRandSetRange( &rng, 0, sqrt(cvkalman->process_noise_cov->data.fl[0]), 0 ); cvRand( &rng, process_noise ); }CvPoint2D32f kalman::get_predict(float x, float y) {/* update state with current position */ state->data.fl[0]=x; state->data.fl[2]=y;/* predict point position */ /* x'k=A 鈥 k+B 鈥 kP'k=A 鈥 k-1*AT + Q */ cvRandSetRange( &rng, 0, sqrt(cvkalman->measurement_noise_cov->data.fl [0]), 0 ); cvRand( &rng, measurement );/* xk=A?xk-1+B?uk+wk */ cvMatMulAdd( cvkalman->transition_matrix, state, process_noise, cvkalman-> state_post );/* zk=H?xk+vk */cvMatMulAdd( cvkalman->measurement_matrix, cvkalman->state_post, meas urement, measurement );cvKalmanCorrect( cvkalman, measurement ); float measured_value_x = measurement->data.fl[0]; float measured_value_y = measurement->data.fl[2];const CvMat* prediction = cvKalmanPredict( cvkalman, 0 ); float predict_value_x = prediction->data.fl[0]; float predict_value_y = prediction->data.fl[2];return(cvPoint2D32f(predict_value_x,predict_value_y)); }void kalman::init_kalman(int x,int xv,int y,int yv) { state->data.fl[0]=x;state->data.fl[1]=xv; state->data.fl[2]=y; state->data.fl[3]=yv; cvkalman->state_post->data.fl[0]=x; cvkalman->state_post->data.fl[1]=xv; cvkalman->state_post->data.fl[2]=y; cvkalman->state_post->data.fl[3]=yv; }c 语言实现代码如下:#include "stdlib.h" #include "rinv.c" int lman(n,m,k,f,q,r,h,y,x,p,g) int n,m,k; double f[],q[],r[],h[],y[],x[],p[],g[]; { int i,j,kk,ii,l,jj,js; double *e,*a,*b; e=malloc(m*m*sizeof(double)); l=m; if (l<n) l=n; a=malloc(l*l*sizeof(double)); b=malloc(l*l*sizeof(double)); for (i=0; i<=n-1; i++) for (j=0; j<=n-1; j++) { ii=i*l+j; a[ii]=0.0; for (kk=0; kk<=n-1; kk++) a[ii]=a[ii]+p[i*n+kk]*f[j*n+kk]; } for (i=0; i<=n-1; i++) for (j=0; j<=n-1; j++) { ii=i*n+j; p[ii]=q[ii]; for (kk=0; kk<=n-1; kk++) p[ii]=p[ii]+f[i*n+kk]*a[kk*l+j]; } for (ii=2; ii<=k; ii++) { for (i=0; i<=n-1; i++) for (j=0; j<=m-1; j++) { jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=n-1; kk++) a[jj]=a[jj]+p[i*n+kk]*h[j*n+kk];} for (i=0; i<=m-1; i++) for (j=0; j<=m-1; j++){ jj=i*m+j; e[jj]=r[jj]; for (kk=0; kk<=n-1; kk++)e[jj]=e[jj]+h[i*n+kk]*a[kk*l+j]; } js=rinv(e,m); if (js==0){ free(e); free(a); free(b); return(js);} for (i=0; i<=n-1; i++) for (j=0; j<=m-1; j++){ jj=i*m+j; g[jj]=0.0; for (kk=0; kk<=m-1; kk++)g[jj]=g[jj]+a[i*l+kk]*e[j*m+kk]; } for (i=0; i<=n-1; i++){ jj=(ii-1)*n+i; x[jj]=0.0; for (j=0; j<=n-1; j++)x[jj]=x[jj]+f[i*n+j]*x[(ii-2)*n+j]; } for (i=0; i<=m-1; i++){ jj=i*l; b[jj]=y[(ii-1)*m+i]; for (j=0; j<=n-1; j++) b[jj]=b[jj]-h[i*n+j]*x[(ii-1)*n+j]; } for (i=0; i<=n-1; i++) { jj=(ii-1)*n+i;for (j=0; j<=m-1; j++) x[jj]=x[jj]+g[i*m+j]*b[j*l];} if (ii<k){ for (i=0; i<=n-1; i++) for (j=0; j<=n-1; j++){ jj=i*l+j; a[jj]=0.0; for (kk=0; kk<=m-1; kk++)a[jj]=a[jj]-g[i*m+kk]*h[kk*n+j]; if (i==j) a[jj]=1.0+a[jj]; } for (i=0; i<=n-1; i++) for (j=0; j<=n-1; j++) { jj=i*l+j; b[jj]=0.0; for (kk=0; kk<=n-1; kk++) b[jj]=b[jj]+a[i*l+kk]*p[kk*n+j]; } for (i=0; i<=n-1; i++) for (j=0; j<=n-1; j++) { jj=i*l+j; a[jj]=0.0; for (kk=0; kk<=n-1; kk++) a[jj]=a[jj]+b[i*l+kk]*f[j*n+kk]; } for (i=0; i<=n-1; i++) for (j=0; j<=n-1; j++) { jj=i*n+j; p[jj]=q[jj]; for (kk=0; kk<=n-1; kk++) p[jj]=p[jj]+f[i*n+kk]*a[j*l+kk]; } }} free(e); free(a); free(b); return(js);}。
卡尔曼滤波代码c

卡尔曼滤波代码c卡尔曼滤波是一种用于估计系统状态的滤波算法。
以下是一个简单的卡尔曼滤波的 C 代码实现:```c#include <stdio.h>#define Q 0.1 // 过程噪声的方差#define R 1.0 // 测量噪声的方差void kalman_filter(float* x, float* P, float z, float* K) {// 预测步骤float x_pred = *x;float P_pred = *P + Q;// 更新步骤float y = z - x_pred;float S = P_pred + R;float K_gain = P_pred / S;*x = x_pred + K_gain * y;*P = (1 - K_gain) * P_pred;*K = K_gain;}int main() {float x = 0; // 初始状态float P = 1; // 初始协方差float K; // 卡尔曼增益float measurements[] = {1, 2, 3, 4, 5}; // 测量值for (int i = 0; i < 5; i++) {kalman_filter(&x, &P, measurements[i], &K);printf("Measurement: %.2f, Estimated: %.2f\n", measurements[i], x);}return 0;}```在这个例子中,我们使用卡尔曼滤波来估计一个连续的测量值序列。
在每次测量后,我们调用`kalman_filter` 函数来更新状态估计值`x` 和协方差 `P`。
然后,我们打印出当前测量值和估计值。
这只是一个简单的卡尔曼滤波实现,更复杂的应用可能需要更多的参数和计算。
如果你有特定的应用需求,可以根据卡尔曼滤波的原理进行相应的调整和扩展。
卡尔曼滤波代码

卡尔曼滤波代码卡尔曼滤波是一种常用的估计算法,它可以通过对系统状态的观测值进行处理,得到对系统状态的更准确估计。
卡尔曼滤波的核心思想是通过对系统状态的预测和观测值的校正,来得到对系统状态的估计。
下面我们来介绍一下卡尔曼滤波的代码实现。
卡尔曼滤波的代码实现主要分为两个部分:预测和校正。
预测部分主要是根据上一时刻的状态和控制量,预测当前时刻的状态;校正部分主要是根据当前时刻的观测值,对预测的状态进行校正,得到更准确的状态估计。
预测部分的代码实现如下:```pythondef predict(x, P, F, Q, B, u):# x: 上一时刻的状态# P: 上一时刻的状态协方差矩阵# F: 状态转移矩阵# Q: 状态噪声协方差矩阵# B: 控制矩阵# u: 控制量# 预测状态x = F @ x + B @ u# 预测状态协方差矩阵P=F@*****+Qreturn x, P```校正部分的代码实现如下:```pythondef correct(x, P, H, R, z):# x: 预测的状态# P: 预测的状态协方差矩阵# H: 观测矩阵# R: 观测噪声协方差矩阵# z: 观测值# 计算卡尔曼增益K=*****@np.linalg.inv(H@*****+R) # 校正状态x = x + K @ (z - H @ x)# 校正状态协方差矩阵P = (np.eye(len(x)) - K @ H) @ Preturn x, P```以上代码中,`@` 表示矩阵乘法,`np.linalg.inv()` 表示矩阵求逆,`np.eye()` 表示单位矩阵。
卡尔曼滤波的代码实现需要注意以下几点:1. 状态和观测值的维度需要匹配,否则无法进行矩阵运算。
2. 状态转移矩阵和观测矩阵需要根据具体问题进行设计,保证能够正确地描述系统的动态特性和观测特性。
3. 状态噪声协方差矩阵和观测噪声协方差矩阵需要根据具体问题进行估计,保证能够正确地描述系统的噪声特性。
卡尔曼滤波C代码分析(pdf高清版)

z k Hxk vk
第5 页
cztqwan 2015-11-23
Z 为观测变量, 也就是程序中输入的角度测量值 Accel, 可见 X 矩阵中的 Angle 和 Accel 是直接相关的,而 Q_bias 则和 Accel 无关,所以 H 1 0 。 R 即为加速度计测量出角度值的噪声。 变量都弄明白意思了,接下来就是计算了,这里还是把 PP 当成 a,b,c,d。 a b T P HT 1 0 a c ,对应 PCt_0 和 PCt_1 c d
P a c dt b dt b d dt Q c d dt d
现在来看代码,是不是和公式很像?代码中的 Pdot 为矩阵计算得中间变量, PP 即是公式中的 P, 对应 a,b,c,d。 仔细的话, 可以发现代码和公式有一点点不同, 就是 Q_angle,Q_gyro 都乘上了 dt,但是 Q_angle,Q_gyro 是固定值,dt 也是固 定值,所以它们相乘也还是一个固定的值,只要 Q_angle,Q_gyro 初始设置合适 就没有影响了。
第3 页
cztqwan 2015-11-23 float float char float float float float float R_angle=0.5; //加速度计测量噪声的协方差 dt=0.005; //积分时间,dt 为滤波器采样时间(秒) C_0 = 1; //H 矩阵的一个数 Q_bias=0, Angle_err=0; //Q_bias 为陀螺仪漂移 PCt_0=0, PCt_1=0, E=0; //中间变量 K_0=0, K_1=0, t_0=0, t_1=0; //K 是卡尔曼增益,t 是中间变量 Pdot[4] ={0,0,0,0}; //计算 P 矩阵的中间变量 PP[2][2] = { { 1, 0 },{ 0, 1 } }; //公式中 P 矩阵,X 的协方差
卡尔曼滤波 matlab代码
卡尔曼滤波 matlab代码【实用版】目录一、卡尔曼滤波简介二、卡尔曼滤波算法原理三、MATLAB 代码实现卡尔曼滤波四、总结正文一、卡尔曼滤波简介卡尔曼滤波是一种线性高斯状态空间模型,主要用于估计动态系统的状态,具有良好的实时性、鲁棒性和准确性。
它广泛应用于导航、定位、机器人控制等领域。
二、卡尔曼滤波算法原理卡尔曼滤波主要包括两个部分:预测阶段和更新阶段。
预测阶段:1.初始化状态变量和协方差矩阵。
2.根据系统动态模型,预测系统的状态变量和协方差矩阵。
更新阶段:1.测量系统的状态变量,得到观测数据。
2.根据观测数据和预测的状态变量,计算卡尔曼增益。
3.使用卡尔曼增益,更新状态变量和协方差矩阵。
三、MATLAB 代码实现卡尔曼滤波以下是一个简单的卡尔曼滤波 MATLAB 代码示例:```MATLABfunction [x, P] = kalman_filter(x, P, F, Q, H, R, z)% 初始化x = 初始状态向量;P = 初始协方差矩阵;% 预测阶段F = 系统动态矩阵;Q = 测量噪声协方差矩阵;H = 观测矩阵;R = 观测噪声协方差矩阵;z = 观测数据;% 预测状态变量和协方差矩阵[x_pred, P_pred] = forward_prediction(x, P, F, Q, H, R);% 更新阶段[x_upd, P_upd] = update(x_pred, P_pred, z);% 输出结果x = x_upd;P = P_upd;endfunction [x_pred, P_pred] = forward_prediction(x, P, F, Q, H, R)% 预测状态变量和协方差矩阵x_pred = F * x;P_pred = F * P * F" + Q;endfunction [x_upd, P_upd] = update(x_pred, P_pred, z)% 更新状态变量和协方差矩阵S = H" * P_pred * H;K = P_pred * H" * S^-1;x_upd = x_pred + K * (z - H * x_pred);P_upd = (I - K * H") * P_pred;end```四、总结卡尔曼滤波是一种高效、准确的状态估计方法,适用于各种线性高斯动态系统。
卡尔曼滤波算法(C--C++两种实现代码)
卡尔曼滤波算法实现代码C++实现代码如下:============================kalman.h================= ===============// kalman.h: interface for the kalman class.////////////////////////////////////////////////////////////////////////#if !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__IN CLUDED_)#define AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C0__INCLU DED_#if _MSC_VER > 1000#pragma once#endif// _MSC_VER > 1000#include <math.h>#include "cv.h"class kalman{public:void init_kalman(int x,int xv,int y,int yv);CvKalman* cvkalman;CvMat* state;CvMat* process_noise;CvMat* measurement;const CvMat* prediction;CvPoint2D32f get_predict(float x, float y);kalman(int x=0,int xv=0,int y=0,int yv=0);//virtual ~kalman();};#endif// !defined(AFX_KALMAN_H__ED3D740F_01D2_4616_8B74_8BF57636F2C 0__INCLUDED_)============================kalman.cpp=============== =================#include "kalman.h"#include <stdio.h>/* tester de printer toutes les valeurs des vecteurs*//* tester de changer les matrices du noises *//* replace state by cvkalman->state_post ??? */CvRandState rng;const double T = 0.1;kalman::kalman(int x,int xv,int y,int yv){cvkalman = cvCreateKalman( 4, 4, 0 );state = cvCreateMat( 4, 1, CV_32FC1 );process_noise = cvCreateMat( 4, 1, CV_32FC1 );measurement = cvCreateMat( 4, 1, CV_32FC1 );int code = -1;/* create matrix data */const float A[] = {1, T, 0, 0,0, 1, 0, 0,0, 0, 1, T,0, 0, 0, 1};const float H[] = {1, 0, 0, 0,0, 0, 0, 0,0, 0, 1, 0,0, 0, 0, 0};const float P[] = {pow(320,2), pow(320,2)/T, 0, 0,pow(320,2)/T, pow(320,2)/pow(T,2), 0, 0, 0, 0, pow(240,2), pow(240,2)/T,0, 0, pow(240,2)/T, pow(240,2)/pow(T,2) };const float Q[] = {pow(T,3)/3, pow(T,2)/2, 0, 0,pow(T,2)/2, T, 0, 0,0, 0, pow(T,3)/3, pow(T,2)/2,0, 0, pow(T,2)/2, T};const float R[] = {1, 0, 0, 0,0, 0, 0, 0,0, 0, 1, 0,0, 0, 0, 0};cvRandInit( &rng, 0, 1, -1, CV_RAND_UNI );cvZero( measurement );cvRandSetRange( &rng, 0, 0.1, 0 );rng.disttype = CV_RAND_NORMAL;cvRand( &rng, state );memcpy( cvkalman->transition_matrix->data.fl, A, sizeof(A));memcpy( cvkalman->measurement_matrix->data.fl, H, sizeof(H));memcpy( cvkalman->process_noise_cov->data.fl, Q, sizeof(Q));memcpy( cvkalman->error_cov_post->data.fl, P, sizeof(P));memcpy( cvkalman->measurement_noise_cov->data.fl, R, sizeof(R));//cvSetIdentity( cvkalman->process_noise_cov, cvRealScalar(1e-5) ); //cvSetIdentity( cvkalman->error_cov_post, cvRealScalar(1));//cvSetIdentity( cvkalman->measurement_noise_cov, cvRealScalar(1e-1) );/* choose initial state */state->data.fl[0]=x;state->data.fl[1]=xv;state->data.fl[2]=y;state->data.fl[3]=yv;cvkalman->state_post->data.fl[0]=x;cvkalman->state_post->data.fl[1]=xv;cvkalman->state_post->data.fl[2]=y;cvkalman->state_post->data.fl[3]=yv;cvRandSetRange( &rng, 0, sqrt(cvkalman->process_noise_cov->data.fl[0]), 0 ); cvRand( &rng, process_noise );}CvPoint2D32f kalman::get_predict(float x, float y){/* update state with current position */state->data.fl[0]=x;state->data.fl[2]=y;/* predict point position *//* x'k=A鈥鈥P'k=A鈥-1*AT + Q */cvRandSetRange( &rng, 0, sqrt(cvkalman->measurement_noise_cov->data.fl [0]), 0 );cvRand( &rng, measurement );/* xk=A?xk-1+B?uk+wk */cvMatMulAdd( cvkalman->transition_matrix, state, process_noise, cvkalman-> state_post );/* zk=H?xk+vk */cvMatMulAdd( cvkalman->measurement_matrix, cvkalman->state_post, meas urement, measurement );cvKalmanCorrect( cvkalman, measurement );float measured_value_x = measurement->data.fl[0];float measured_value_y = measurement->data.fl[2];const CvMat* prediction = cvKalmanPredict( cvkalman, 0 );float predict_value_x = prediction->data.fl[0];float predict_value_y = prediction->data.fl[2];return(cvPoint2D32f(predict_value_x,predict_value_y));}void kalman::init_kalman(int x,int xv,int y,int yv){state->data.fl[0]=x;state->data.fl[1]=xv;state->data.fl[2]=y;state->data.fl[3]=yv;cvkalman->state_post->data.fl[0]=x;cvkalman->state_post->data.fl[1]=xv;cvkalman->state_post->data.fl[2]=y;cvkalman->state_post->data.fl[3]=yv;}c语言实现代码如下:#include "stdlib.h"#include "rinv.c"int lman(n,m,k,f,q,r,h,y,x,p,g)int n,m,k;double f[],q[],r[],h[],y[],x[],p[],g[];{ int i,j,kk,ii,l,jj,js;double *e,*a,*b;e=malloc(m*m*sizeof(double));l=m;if (l<n) l=n;a=malloc(l*l*sizeof(double));b=malloc(l*l*sizeof(double));for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ ii=i*l+j; a[ii]=0.0;for (kk=0; kk<=n-1; kk++)a[ii]=a[ii]+p[i*n+kk]*f[j*n+kk];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ ii=i*n+j; p[ii]=q[ii];for (kk=0; kk<=n-1; kk++)p[ii]=p[ii]+f[i*n+kk]*a[kk*l+j];}for (ii=2; ii<=k; ii++){ for (i=0; i<=n-1; i++)for (j=0; j<=m-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=n-1; kk++)a[jj]=a[jj]+p[i*n+kk]*h[j*n+kk];}for (i=0; i<=m-1; i++)for (j=0; j<=m-1; j++){ jj=i*m+j; e[jj]=r[jj];for (kk=0; kk<=n-1; kk++)e[jj]=e[jj]+h[i*n+kk]*a[kk*l+j];}js=rinv(e,m);if (js==0){ free(e); free(a); free(b); return(js);}for (i=0; i<=n-1; i++)for (j=0; j<=m-1; j++){ jj=i*m+j; g[jj]=0.0;for (kk=0; kk<=m-1; kk++)g[jj]=g[jj]+a[i*l+kk]*e[j*m+kk];}for (i=0; i<=n-1; i++){ jj=(ii-1)*n+i; x[jj]=0.0;for (j=0; j<=n-1; j++)x[jj]=x[jj]+f[i*n+j]*x[(ii-2)*n+j];}for (i=0; i<=m-1; i++){ jj=i*l; b[jj]=y[(ii-1)*m+i];for (j=0; j<=n-1; j++)b[jj]=b[jj]-h[i*n+j]*x[(ii-1)*n+j];}for (i=0; i<=n-1; i++){ jj=(ii-1)*n+i;for (j=0; j<=m-1; j++)x[jj]=x[jj]+g[i*m+j]*b[j*l];}if (ii<k){ for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=m-1; kk++)a[jj]=a[jj]-g[i*m+kk]*h[kk*n+j];if (i==j) a[jj]=1.0+a[jj];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; b[jj]=0.0;for (kk=0; kk<=n-1; kk++)b[jj]=b[jj]+a[i*l+kk]*p[kk*n+j];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*l+j; a[jj]=0.0;for (kk=0; kk<=n-1; kk++)a[jj]=a[jj]+b[i*l+kk]*f[j*n+kk];}for (i=0; i<=n-1; i++)for (j=0; j<=n-1; j++){ jj=i*n+j; p[jj]=q[jj];for (kk=0; kk<=n-1; kk++)p[jj]=p[jj]+f[i*n+kk]*a[j*l+kk];}}}free(e); free(a); free(b);return(js);}。
卡尔曼滤波伪代码

卡尔曼滤波伪代码卡尔曼滤波是一种常用于估计系统状态的数学算法。
它在许多领域中都有着广泛的应用,包括导航、无线通信、机器人技术等。
卡尔曼滤波算法凭借其优秀的性能和可靠性,成为估计问题中的一种重要解决方案。
不论是在系统状态的估计还是在噪声的处理方面,卡尔曼滤波都能提供准确性和精确性。
下面是卡尔曼滤波的伪代码实现:```初始化:X=初始状态估计P=初始状态协方差矩阵F=状态转移矩阵Q=过程噪声协方差矩阵H=观测矩阵R=观测噪声协方差矩阵预测:X' = F * XP' = F * P * F^T + Q更新:K = P' * H^T * (H * P' * H^T + R)^-1X = X' + K * (Z - H * X')P = (I - K * H) * P'返回:X 估计的系统状态```卡尔曼滤波的实现主要分为两个步骤:预测和更新。
在预测步骤中,根据当前状态和系统模型,使用状态转移矩阵F来预测下一个状态。
同时,通过协方差矩阵P来估计状态的不确定度。
在更新步骤中,根据观测结果和观测矩阵H,通过计算卡尔曼增益K来权衡预测值和观测值的差异。
然后,使用卡尔曼增益来调整预测值,更接近于观测值。
同时,通过计算协方差矩阵P来更新状态的不确定度。
通过不断地进行预测和更新,卡尔曼滤波算法能够逐步减小状态估计的误差,并提供更加准确和可靠的结果。
对于伪代码中的各个变量,需要根据具体的应用场景进行定义和设置。
其中,过程噪声协方差矩阵Q和观测噪声协方差矩阵R是用来描述噪声特性的重要参数。
它们的正确选择能够在一定程度上影响卡尔曼滤波的性能。
在实际应用中,卡尔曼滤波算法需要根据具体问题进行调整和改进。
对于非线性问题,可以使用扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)等方法。
此外,还可以考虑模型状态的非高斯性和观测误差的非线性分布等情况。
总之,卡尔曼滤波算法是一种强大而灵活的估计方法,通过预测和更新两个步骤,能够对系统的状态进行准确估计。
集合卡尔曼滤波matlab代码

集合卡尔曼滤波matlab代码卡尔曼滤波一直是控制和估计理论中的经典算法之一。
它是一种用于在噪声和不确定性下估计系统状态的递归滤波器。
集合卡尔曼滤波(EKF)是卡尔曼滤波的一种扩展形式,通过考虑非线性函数与噪声及其导数之间的关系,可以应用于非线性问题。
集合卡尔曼滤波包括两个步骤:预测和更新。
在预测步骤中,通过当前状态和状态转移矩阵来预测下一个状态,并计算系统协方差矩阵。
在更新步骤中,将预测值与观察值进行比较,并计算更新后的状态和协方差矩阵。
```matlabfunction [X, P] = EKF(X, P, Z, Q, R, F, H)% 集合卡尔曼滤波% 预测步骤X = F * X; % 预测下一个状态P = F * P * F' + Q; % 计算协方差矩阵% 更新步骤K = P * H' * inv(H * P * H' + R); % 计算卡尔曼增益X = X + K * (Z - H * X); % 计算更新后的状态P = (eye(size(P)) - K * H) * P; % 计算更新后的协方差矩阵end```其中,变量含义如下:- X: 状态向量- P: 状态协方差矩阵- Z: 观测值- Q: 状态噪声协方差矩阵- R: 观测噪声协方差矩阵- F: 状态转移矩阵- H: 观测矩阵可以通过以下代码演示如何使用集合卡尔曼滤波器:```matlab% 初始化参数X = [0; 0]; % 初始状态向量P = eye(2); % 初始协方差矩阵Q = eye(2) * 0.01; % 状态噪声协方差矩阵R = eye(1) * 0.01; % 观测噪声协方差矩阵F = [1 1; 0 1]; % 状态转移矩阵H = [1 0]; % 观测矩阵Z = 1; % 观测值% 输出结果disp('更新后的状态向量:');disp(X);disp('更新后的协方差矩阵:');disp(P);```通过修改参数和观测值,可以应用集合卡尔曼滤波于多种不同的非线性问题中。
卡尔曼滤波器实现代码

VectorXd k = Cal_kalmen_gain_1_2(P_predict_i, H, Rnoise);
VectorXd x_predict_calibration_i = Correctpredcit_x_2_1(y, x_predict_i, k);//F is the relation of this time and next time
printf("hello world\n"); VectorXd my_vector(2); my_vector << 10, 20; MatrixXd my_matrix(2, 2); my_matrix << 1, 2, 3, 4; cout << my_matrix << endl; cout << my_vector << endl;
R = MatrixXd(1, 1); R << 1;
I = MatrixXd::Identity(2, 2);
Q = MatrixXd(2, 2); Q << 0, 0, 0, 0;
//create a list of measurements VectorXd single_meas(1); single_meas << 1; measurements.push_back(single_meas); single_meas << 5; measurements.push_back(single_meas); single_meas << 9; measurements.push_back(single_meas); single_meas << 13; measurements.push_back(single_meas); single_meas << 17; measurements.push_back(single_meas); single_meas << 21; measurements.push_back(single_meas); single_meas << 25; measurements.push_back(single_meas); single_meas << 29; measurements.push_back(single_meas); filter(x, P,u,F,H,R,I, Q,8); ; }
imu 卡尔曼滤波代码

imu 卡尔曼滤波代码IMU卡尔曼滤波是一种常用的姿态估计算法,其基本思想是将加速度计和陀螺仪的输出数据作为观测量,通过卡尔曼滤波器来估计姿态角。
以下是IMU卡尔曼滤波器的代码示例:```pythonimport numpy as npclass KalmanFilter:def __init__(self):# 状态向量 [pitch, pitch_rate]self.x = np.zeros((2, 1))# 状态转移矩阵self.A = np.array([[1, -dt],[0, 1]])# 系统测量矩阵self.H = np.array([[1, 0]])# 过程噪声协方差矩阵self.Q = np.array([[q1, 0],[0, q2]])# 观测噪声协方差矩阵self.R = r# 卡尔曼增益self.K = np.zeros((2, 1))def predict(self, gyro_data):# 预测状态self.x = np.dot(self.A, self.x) + np.array([[gyro_data], [0]])# 预测协方差P = np.dot(np.dot(self.A, self.P), self.A.T) + self.Qreturn self.x[0, 0], P[0, 0]def update(self, acc_data):# 计算卡尔曼增益S = np.dot(np.dot(self.H, self.P), self.H.T) + self.Rself.K = np.dot(np.dot(self.P, self.H.T),np.linalg.inv(S))# 计算状态y = np.array([[acc_data]]) - np.dot(self.H, self.x)self.x = self.x + np.dot(self.K, y)# 更新协方差self.P = np.dot((np.eye(2) - np.dot(self.K, self.H)), self.P)```其中,`dt`为采样时间,`q1`和`q2`为过程噪声的方差,`r`为观测噪声的方差,`gyro_data`为陀螺仪输出数据,`acc_data`为加速度计输出数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/***************************************************************** **********//* kalman.c *//* 1-D Kalman filter Algorithm, using an inclinometer and gyro *//* Author: Rich Chi Ooi *//* Version: 1.0 *//* Date:30.05.2003 *//* Adapted from Trammel Hudson(hudson@) *//* ------------------------------- *//* Compilation procedure: *//* Linux *//* gcc68 -c XXXXXX.c (to create object file) *//* gcc68 -o XXXXXX.hex XXXXXX.o ppwa.o *//*Upload data : *//* ul filename.txt *//***************************************************************** **********//* In this version: *//***************************************************************** **********//* This is a free software; you can redistribute it and/or modify *//* it under the terms of the GNU General Public License as published *//* by the Free Software Foundation; either version 2 of the License, *//* or (at your option) any later version. *//* *//* this code is distributed in the hope that it will be useful, *//* but WITHOUT ANY WARRANTY; without even the implied warranty of */ /* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the *//* GNU General Public License for more details. *//* *//* You should have received a copy of the GNU General Public License *//* along with Autopilot; if not, write to the Free Software *//* Foundation, Inc., 59 Temple Place, Suite 330, Boston, *//* MA 02111-1307 USA *//***************************************************************** **********/#include <math.h>#include "eyebot.h"/** The state is updated with gyro rate measurement every 20ms* change this value if you update at a different rate.*/static const float dt = 0.02;/** The covariance matrix.This is updated at every time step to* determine how well the sensors are tracking the actual state.*/static float P[2][2] = {{ 1, 0 },{ 0, 1 }};/** Our two states, the angle and the gyro bias.As a byproduct of computing * the angle, we also have an unbiased angular rate available.These are* read-only to the user of the module.*/float angle;float q_bias;float rate;/** The R represents the measurement covariance noise.R=E[vvT]* In this case,it is a 1x1 matrix that says that we expect* 0.1 rad jitter from the inclinometer.* for a 1x1 matrix in this case v = 0.1*/static const float R_angle = 0.001 ;/** Q is a 2x2 matrix that represents the process covariance noise.* In this case, it indicates how much we trust the inclinometer* relative to the gyros.*/static const float Q_angle = 0.001;static const float Q_gyro = 0.0015;/** state_update is called every dt with a biased gyro measurement* by the user of the module. It updates the current angle and* rate estimate.** The pitch gyro measurement should be scaled into real units, but* does not need any bias removal. The filter will track the bias.** A = [ 0 -1 ]* [ 0 0 ]*/void stateUpdate(const float q_m){float q;float Pdot[4];/* Unbias our gyro */q = q_m - q_bias;//当前角速度:测量值-估计值/** Compute the derivative of the covariance matrix* (equation 22-1)* Pdot = A*P + P*A' + Q**/Pdot[0] = Q_angle - P[0][1] - P[1][0]; /* 0,0 */Pdot[1] = - P[1][1]; /* 0,1 */Pdot[2] = - P[1][1]; /* 1,0 */Pdot[3] = Q_gyro; /* 1,1 *//* Store our unbias gyro estimate */rate = q;/** Update our angle estimate* angle += angle_dot * dt* += (gyro - gyro_bias) * dt* += q * dt*/angle += q * dt;//角速度积分累加到估计角度/* Update the covariance matrix */P[0][0] += Pdot[0] * dt;P[0][1] += Pdot[1] * dt;P[1][0] += Pdot[2] * dt;P[1][1] += Pdot[3] * dt;}/** kalman_update is called by a user of the module when a new* inclinoometer measurement is available.** This does not need to be called every time step, but can be if* the accelerometer data are available at the same rate as the* rate gyro measurement.** H = [ 1 0 ]** because the angle measurement directly corresponds to the angle * estimate and the angle measurement has no relation to the gyro * bias.*/void kalmanUpdate(const float incAngle){/* Compute our measured angle and the error in our estimate */ float angle_m = incAngle;float angle_err = angle_m - angle;//1.12 zk-H*xk_dot/** h_0 shows how the state measurement directly relates to* the state estimate.** H = [h_0 h_1]** The h_1 shows that the state measurement does not relate* to the gyro bias estimate. We don't actually use this, so* we comment it out.*/float h_0 = 1;/* const float h_1 = 0; *//** Precompute PH' as the term is used twice* Note that H[0,1] = h_1 is zero, so that term is not not computed */const float PHt_0 = h_0*P[0][0]; /* + h_1*P[0][1] = 0*/const float PHt_1 = h_0*P[1][0]; /* + h_1*P[1][1] = 0*//** Compute the error estimate:* (equation 21-1)** E = H P H' + R*/float E = R_angle +(h_0 * PHt_0);/** Compute the Kalman filter gains:* (equation 21-2)** K = P H' inv(E)*/float K_0 = PHt_0 / E;float K_1 = PHt_1 / E;/** Update covariance matrix:* (equation 21-3)** P = P - K H P* Let* Y = H P*/float Y_0 = PHt_0; /*h_0 * P[0][0]*/float Y_1 = h_0 * P[0][1];P[0][0] -= K_0 * Y_0;P[0][1] -= K_0 * Y_1;P[1][0] -= K_1 * Y_0;P[1][1] -= K_1 * Y_1;/** Update our state estimate:** Xnew = X + K * error** err is a measurement of the difference in the measured state* and the estimate state. In our case, it is just the difference* between the inclinometer measured angle and the estimated angle.*/angle += K_0 * angle_err;q_bias += K_1 * angle_err;}/p-760946791.html//现在智能小车上用的卡尔曼滤波算法。