5T抓斗原理图
起重机械基础知识图片讲解
起重机械基础知识图片讲解(正文开始)图片1:起重机械示意图在起重机械的基础知识中,了解起重机械的组成部分以及基本工作原理是十分重要的。
图片1展示了一个示意图,可用于更好地理解起重机械的结构和操作原理。
图片2:起重机械的分类起重机械按照不同的工作原理和用途可以分为多种不同的类型,如桥式起重机、门式起重机、塔式起重机等。
图片2清晰地展示了各种起重机械的外观和结构特点。
图片3:起重机械配重系统起重机械在进行吊运作业时,为了保持平衡和稳定,通常会配备配重系统。
图片3显示了起重机械的配重系统,包括主臂上的配重块等。
配重系统的使用可以提高机械的运行效率和安全性。
图片4:起重机械液压系统示意图液压系统是现代起重机械中常见的动力传递方式之一。
图片4展示了起重机械液压系统的示意图,包括液压泵、油箱、液压缸等组成部分。
液压系统的优势在于其稳定性和灵活性。
图片5:起重机械电气控制系统起重机械的电气控制系统用于控制机械的运行,包括起停、提升、行走等功能。
图片5展示了起重机械电气控制系统的主要元件,如控制器、电机等。
电气控制系统的合理运用可以提高起重机械的操作性能。
图片6:起重机械安全装置起重机械安全装置的作用在于保护操作人员和周围环境的安全。
图片6展示了常见的起重机械安全装置,如限位器、重载保护装置等。
合理使用安全装置可以减少事故的发生,确保施工工地的安全。
图片7:起重机械维修与保养起重机械的维修与保养是保持其正常运行和延长使用寿命的重要措施。
图片7展示了维修工作人员进行维修和保养的场景,包括润滑部件、更换磨损部件等。
定期维护和保养可以提高起重机械的工作效率和可靠性。
(正文结束)通过以上的图片讲解,我们对起重机械的基础知识有了更加直观的了解。
了解起重机械的结构、分类和工作原理,掌握其液压系统、电气控制系统以及安全装置的运用,以及合理的维修与保养措施,可以更好地操作、维护和管理起重机械,确保工地的安全和顺利进行。
5t抓斗重机技术规格书
山东石横特钢集团东阿金华钢铁有限公司炼钢工程5t抓斗吊设备技术规格书1534-2009工程山东省冶金设计院有限责任公司2009-11本技术规格书仅提供有限的技术要求,并未对一切技术细节做出规定,也未充分引述有关标准和规范的详细条文。
卖方提供的设备应能够满足规格书中的规定,包括功能、结构、性能参数等方面的技术要求,并保证符合有关国家、行业技术规范和标准以及买方提供的技术资料的要求。
技术规格书所使用的标准如与卖货方所执行的标准发生矛盾时,按较高标准执行。
在订合同之后,买方有权提出一些补充要求,具体项目由买卖双方共同商定。
1.设备编号 SG1534•5·2·0032.设备名称 5t抓斗桥式起重机3.技术数据3.1主要技术参数工作制度采用A6工作制一台双梁起重机,带操作室起重量:5t起重机跨度:19m起升高度:~30m, 旋流井最底面标高-22m,车间地坪+0.0m,抓斗吊离车间地面的极限高度为8m;配套超重型0.75m3抓斗,抓斗的开闭方向与起重机大运行方向一致额定工作速度:主起升:≥7.1m/min大车运行:≥73m/min缓冲器高度:1020mm道轨型号:QU80滑线位置:驾驶室对侧,上下方向:400mm、450mm、450mm;水平方向:600mm起重机重量:~26t使用环境:室内(车间厂房)3.2供配电设施技术条件:(1)电源:三相交流 380V+/-10%; 50HZ+/-3%;(2)系统中性点接地方式:380V(动力用)中性点直接接地380V/220V(照明用)中性点直接接地(3)电气设备的适应电压电气设备的适应电压要求按下表选用。
电气设备的适应电压3.3 主要技术要求(1)起重机采用双梁窄箱体结构,主梁、端梁、小车架材质采用16Mn。
(2)电动机为起重机专用的YZR绕线型电动机,绝缘等级H级;润滑系统采用电动集中干油润滑,保证油路不渗油,打油畅通。
(3)小车限位形式为接近开关,大车限位形式为红外线,起升设双限位。
克令吊抓斗工作原理

克令吊抓斗工作原理
嘿,朋友们!今天咱来聊聊克令吊抓斗的工作原理,这可神奇得很呐!
你看啊,克令吊抓斗就像是一个大力士的手,能把各种东西紧紧抓住。
比如说码头边那些重重的货物,它就能轻轻松松地抓起来。
克令吊抓斗工作的时候啊,就像是一场精彩的表演!它的开合装置就像是一双灵活的手指,能根据需要张开或者合拢。
哎呀,这不就和我们的手一样嘛,想抓什么东西的时候就打开手指,抓到了就合拢起来,牢牢抓住。
当要抓取货物时,克令吊就会把抓斗放下去,那动作,可稳当了!这时候抓斗就像一个迫不及待的小馋猫,一下子就冲向货物。
等抓到了货物,它又会稳稳地升起来,带着货物到达指定的地方。
“嘿,我抓到啦!”抓斗好像在得意地喊着。
然后呢,到了地方再把货物放下,就这么简单粗暴!整个过程一气呵成,那效率,高得很呐!就好比说,我们去超市买东西,手就是那个抓斗,把喜欢的东西抓起来放购物车里,然后再带回家,是不是很好理解?
你说要是没有克令吊抓斗,那些码头工人得多辛苦啊!得靠人力去搬那些重得要命的货物,那得累成啥样啊!所以克令吊抓斗可真是个大功臣呢!
总之,克令吊抓斗就是这样一个厉害的家伙,它的工作原理虽然看似简单,但却发挥着巨大的作用,为我们的生活和工作带来了极大的便利。
咱可得好好感谢它呀!。
项目25 205T桥式起重机电气控制原理分析分解

25.1 桥式起重机的主要结构和运动形式
1. 20/5t桥式起重机的主要结构
桥式起重机是桥架在高架轨道上运行的一种桥架型起重机,又称天 车。桥式起重机的桥架沿铺设在两侧高架上的轨道纵向运行,起重小车 沿铺设在桥架上的轨道横向运行,构成一矩形的工作范围,就可以充分 利用桥架下面的空间吊运物料,不受地面设备的阻碍。这种起重机广泛 用在室内外仓库、厂房、码头和露天贮料场等处。
项目25 20/5t桥式起重 机电气控制原理分析
项目25 20/5t桥式起重机 电气控制原理分析
25
常见起重机的类型
25.1 桥式起重机的主要结构和运动形式 25.2 桥式起重机电动机的电气控制电路 25.3 桥式起重机常见电气故障的检修
桥式类型起重机
桥式类型起重机是指有能运行的 桥架结构和设置在桥架上能运行 的起升机构组成的起重机械。
桥式起重机的结构由主要由机械、电气和金属结构三 大部分组成。
机械部分由主起升机构、副起升机构(15t以上才有)、 小车运行机构和大车运行机构组成。其中包括:电动机、 联轴器、传动轴、制动器、减速器、卷筒和车轮等。 金属结构主要由桥架(主梁、端梁、栏杆、走台、小车 轨道)、司机室和小车架组成。
电气部分由电气设备和电气线路组成,包括桥吊的动力 装置和各机构的起动、调速、换向、制动及停止等的控制 系统。
• 起升运动 起升运动由两台异步电动机驱动,电动机通过 减速器带动卷筒转动,使钢丝绳绕上卷筒或从卷筒放下, 以升降重物。通常在额定起重量超过10吨的普通桥式起重 机上装有主、副两套起升机构,副钩的额定起重量一般为 主钩的15~20%。
2. 20/5t桥式起重机的电气控制特点及要求
20/5t桥式起重机共用5台绕线式异步电动机拖动,它们分别是副钩起 重电动机M1、小车移动电动机M2、大车移动电动机M3和M4、主钩起重电 动机M5。 (1)桥式起重机为适应在重载下频繁起动、反转、制动、变速等操作,主钩、 副钩起重电动机应选用三相线式异步电动机,绕线式电动机转子回路串入适 当电阻可达到最大起动转矩,从而减小起动电流,调节电阻使电动机有一定 的调速范围,且用凸轮控制器进行操作。 (2)为适应桥式起重机大车移动,供电方式采用安全滑触线装置硬线供、馈 电线路,三相电源是从沿着平行于大车导轨方向安装的厂房一侧主滑触线导 管,通过受电器的电刷引入,在导管接线处设置三相电源指示灯。移动小车 一般采用橡胶软电缆供、馈电线路,使用的软电缆常称拖缆。在桥架上安装 钢缆,并与小车运动方向平行,钢缆从小车上支架孔内穿过,电缆通过吊环 与承力尼龙绳一起吊装在钢缆上。
20,5t行车主要部分电气工作原理图
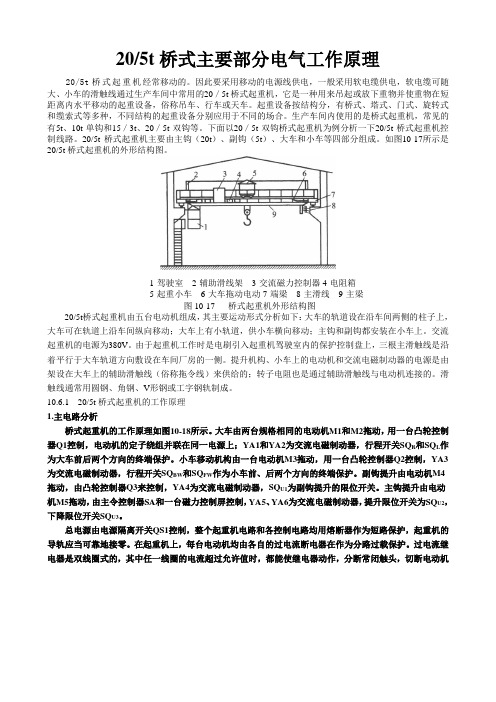
20/5t桥式主要部分电气工作原理20/5t桥式起重机经常移动的。
因此要采用移动的电源线供电,一般采用软电缆供电,软电缆可随大、小车的滑触线通过生产车间中常用的20/5t桥式起重机,它是一种用来吊起或放下重物并使重物在短距离内水平移动的起重设备,俗称吊车、行车或天车。
起重设备按结构分,有桥式、塔式、门式、旋转式和缆索式等多种,不同结构的起重设备分别应用于不同的场合。
生产车间内使用的是桥式起重机,常见的有5t、10t单钩和15/3t、20/5t双钩等。
下面以20/5t双钩桥式起重机为例分析一下20/5t桥式起重机控制线路。
20/5t桥式起重机主要由主钩(20t)、副钩(5t)、大车和小车等四部分组成。
如图10-17所示是20/5t桥式起重机的外形结构图。
1-驾驶室2-辅助滑线架3-交流磁力控制器4-电阻箱5-起重小车6-大车拖动电动7-端梁8-主滑线9-主梁图10-17 桥式起重机外形结构图20/5t桥式起重机由五台电动机组成,其主要运动形式分析如下:大车的轨道设在沿车间两侧的柱子上,大车可在轨道上沿车间纵向移动;大车上有小轨道,供小车横向移动;主钩和副钩都安装在小车上。
交流起重机的电源为380V。
由于起重机工作时是电刷引入起重机驾驶室内的保护控制盘上,三根主滑触线是沿着平行于大车轨道方向敷设在车间厂房的一侧。
提升机构、小车上的电动机和交流电磁制动器的电源是由架设在大车上的辅助滑触线(俗称拖令线)来供给的;转子电阻也是通过辅助滑触线与电动机连接的。
滑触线通常用圆钢、角钢、V形钢或工字钢轨制成。
10.6.1 20/5t桥式起重机的工作原理1.主电路分析桥式起重机的工作原理如图10-18所示。
大车由两台规格相同的电动机M1和M2拖动,用一台凸轮控制器Q1控制,电动机的定子绕组并联在同一电源上;YA1和YA2为交流电磁制动器,行程开关SQ R和SQ L作为大车前后两个方向的终端保护。
小车移动机构由一台电动机M3拖动,用一台凸轮控制器Q2控制,YA3为交流电磁制动器,行程开关SQ BW和SQ FW作为小车前、后两个方向的终端保护。
某型号起重机抓斗结构设计(全套图纸)

某型号起重机抓斗结构设计摘要:首先要对起重机抓斗进行自重分配,对抓斗的结构进行设计以及计s 算,然后对抓斗进行受力分析,其次,对抓斗进行验算校核,最后根据设计参数对抓斗进行三维建模以及绘制二维工程图。
关键词:抓斗;参数;校核;三维建模Grab a certain type of crane designAbstract:We must first carry out weight distribution of the crane grab,grab the structure of the design and calculation, then grab stress analysis, and secondly, to grabwere checking verification, according to the final design parameters for grabs three-dimensional construction mold and drawing two-dimensional drawings.Main glossary:Grab;parameter;Checked;Three-dimensional modeling目录摘要 (Ⅰ)Abstract (Ⅱ)目录 (Ⅲ)1 绪论 (1)1.1 抓斗的概述 (1)1.2 抓斗的发展趋势 (2)1.2.1 国内起重机抓斗发展趋势 (2)1.2.2 国外起重机抓斗发展趋势 (3)1.3 抓斗的分类 (4)2 抓斗方案的确定 (8)2.1 抓斗的选用 (8)2.3 抓斗的结构 (9)2.4 抓斗的工作原理 (9)3 抓斗的结构设计及计算 (11)3.1 抓斗的主要技术参数 (11)3.2 抓斗自重的确定 (11)3.2.1 抓斗抓取能力的影响因素 (11)3.2.2 抓斗的自重 (12)3.2.3 抓斗自重的分配 (12)3.2.4 颚板宽度 (13)3.2.5 抓斗的最大开度 (14)3.2.6 抓斗的其他几何参数 (15)3.2.7 抓斗颚板侧面形状 (15)3.2.8 滑轮组的倍率 (18)3.3 抓斗各部分的具体参数 (18)3.3.1 上承梁具体参数 (18)3.3.2 下承梁具体参数 (18)3.3.3 滑轮支撑体具体参数 (18)3.3.5 颚板具体参数 (19)3.3.6 滑轮 (19)3.4 抓斗的验算 (19)3.4.1 对抓取能力进行验算 (19)3.4.2 对颚板的强度进行校核 (20)3.4.3 颚板跟撑杆链接处连接轴的校核 (21)3.4.4 对连接螺栓M48强度校核 (21)3.4.5 对撑杆强度进行校核 (22)3.4.6 对滑轮组轴强度进行校核 (22)4 对零件三维建模 (23)4.1 SoidWorks软件的简介 (23)4.2 SolidWorks软件常用工具栏 (23)4.2.1 标准栏 (23)4.2.2 视图工具栏 (24)4.2.3 草图绘制工具栏 (24)4.2.4 特征绘制工具栏 (24)4.3 对抓斗实体进行三维建模 (24)4.3.2 下承梁建模 (27)4.3.3 撑杆建模 (28)4.3.4 垫圈建模 (29)4.3.5 滑轮建模 (30)4.3.6 颚板1建模 (31)4.3.7 颚板2建模 (33)4.3.8 滑轮装配体 (34)4.3.9 抓斗装配体 (35)4.4 对各零件绘制二维工程图 (35)4.4.1 撑杆二维工程图 (35)4.4.2 上承梁二维工程图 (36)4.4.3 下承梁二维工程图 (37)4.4.4 滑轮支撑体二维工程图 (37)4.4.5 垫圈二维工程图 (38)4.4.6 滑轮二维工程图 (39)4.4.7 颚板二维工程图 (39)4.4.8 抓斗二维工程图 (41)参考文献 (43)致谢 (45)1 绪论1.1 抓斗的概述抓斗,英文名叫grapple,俄文名叫грейфер;是对物料实施抓取和卸掉物料的一种吊具,抓取和卸掉物料一般是要靠它的左右两个合斗或者多个颚板的开合来实现的。
5吨抓斗起重参数

(南) 大车行走轨道 (西)
滑线侧 (北)
5T抓斗桥式起重机主要参数(跨度22.5m )
抓斗机构(抓斗型号:U43 ,1立方米抓斗) 主要参数 起升机构 开闭机构 起重量( t) 5 工作速度(m/min) 40.1 工作级别 A6 最大起升高度(m) 22 三相交流50HZ,380V 电源 钢丝绳结构 钢丝绳支数 2 2 钢丝绳最大工作拉力kg 1250 1250 卷筒直径 φ 400mm φ 400mm 滑动直径 φ 400mm 电动机型号 YZR225M-8 YZR225M-8 电动机功率 22K w 22K w 电动机转速 730r/min 730r/min 减速机型号 ZQ-500 ZQ-500 减速机传动比I 23.34 23.34 制动器型号 YWZ-300/45 YWZ-300/45 制动力矩(kg.m) 617.4 617.4 注: 1、起重机总重(包括抓斗自重):29.3t 2、操纵室平台为端面开门;操纵室开门方向为侧面开门。 4、滑线形式:H型安全滑线 5、缓冲器形式:聚氨脂形式 驾驶室位置 6、驾驶室方向如右图: 7、抓斗开闭方向为垂直主梁方向。 (东) 运行机构 小车
ቤተ መጻሕፍቲ ባይዱ
主要参数 大车 轨距(mm) 22500 运行速度(m/min) 44.6 113 工作级别 A6 轮矩(mm) 2300 2300 三相交流50HZ,380V 电源 缓冲距离(mm) 100 140 钢轨型号 15kg/m 50kg/m 车轮直径(mm) φ 350 φ 500 车轮滚动轴承内径(mm) 参照国家标准 最大轮压(kg) 12t 电动机型号 YZR132M2-6 YZR160L-6 电动机功率 3.7 11 电动机转速 950 960 减速机型号 ZSC-400 ZHQ-350(中硬齿面) 减速机传动比I 22.4 13 制动器型号 YWZ-200/25 YWZ-200/25 制动力矩(kg.m) 196 196
工程机械船用液压抓斗结构和原理

工程机械船用液压抓斗结构和原理
1、结构组成
液压抓斗主要由铲斗、上横梁、下横梁、液压系统组成,结构如下图所示。
下横梁上铰接了两个铲斗,上、下横梁通过连杆铰接连接,下横梁上面装有液压系统。
抓斗上部有挂钩与起升机构相连。
液压系统由油箱、油泵、控制阀组、液压油缸等组成,如图所示。
两个液压油缸铰接在下横梁两边,活塞杆顶部为锥形,与上横梁中的锥孔紧配,并用螺帽固定。
四根连杆把上横梁和抓斗连接起来,当油缸的下部通人压力油、上部回油时,活塞上移,顶动上横梁上移,连杆拉动抓斗,打开抓斗。
同理,当油缸上部通人压力油时,抓斗关闭。
2、液压系统工作原理
抓斗打开过程:油泵正转时,油箱中的油经过止回阀RV3
进泵,排油进入管路P2,经止回阀RV2进入油缸下方,推动活塞上移,活塞上部回油经液控单向阀SV1进入管路P2,增加了进入到液压油缸的油流量,抓斗快速打开。
管路P2中的最大压力由安全阀DV2整定,当油泵停止工作时,止回阀RV1、RV2和液控单向阀SV2自动关闭,防止抓斗自行关闭。
抓斗关闭过程:油泵反转时,油箱中的油经过止回阀RV4进泵,排油进入管路P1,由止回阀RV1进入油缸上部,推动活塞下移,活塞下部回油经液控单向阀SV2、滤器F流入油箱。
同样,管路P1中的最大油压由安全阀DV1 整定。
如果抓斗已经关闭,油泵还在运行,DV1可以使其关闭压力下降10-15%,这样可以减少能量损失。
过磷酸钙熟化库5t抓斗的结构改进

较大 的插 入深 度 。但 颚 板 过 窄会 使 抓 斗 重 心抬 高 ,
抓斗 有 翻倒 的可 能 。另 外 , 也将 使 抓 斗 两 侧 壁 的 这
阻力较 大 , 会降 低抓 斗的抓 取能 力 , 由于我 们抓取 的 物 料 为非颗 粒型 物 料 , 选用 颚板 形 状 为 摩擦 系数 较
杆
输, 而且 担负着 鲜 钙 的 一次 、 次 翻堆 任 务 , 二 以满 足
我 厂的 生产 能 力 和过磷 酸钙 生产 工艺要 求 。初 略计
算每 台抓 斗 每 天 的 作业 负荷 平 均 约 80t 由于 库 0 。 内酸 雾和 氟气 大 , 作业 环 境 差 , 斗 上 积 料 较严 重 , 抓
l 概 述
我 厂过 磷酸 钙 的生产 能力 为 4 0 k a 由 四台 0 t 。 /
1 桥式 起 重机 的 5t 斗 将 鲜 钙交 替 抓 至不 同 的 0t 抓 新 料堆 置 区进 一 步熟化 , 以减少其 中的游离 酸 含量 。
四台抓 斗不仅 担负 着合 格产 品散 装和包 装 出厂 的运
S P&B H R L T DE GN E IG M E A E N IE RN
20 0 7年 第 3期
难于保 证 正常 的生产 , 并且 设备 维持 费用 较 高 , 使用 不经 济 。 进入 2 0世纪 9 0年 代后 , 为改 变这 种被 动局 面 ,
我 们着 手对该 抓 斗进行技 术 改造 。 由于这类 重 型抓 斗 属 国家非标 产 品 , 各生 产 厂一般 已不生产 。为此 ,
作 时 ( 斗悬 空 提 起 时 ) 天 车 工 控 制 操 纵杆 , 用 抓 , 利
虽 刚性 好 , 作业 时 两边 颚头易 脱 出 , 成侧 面板 变 但 造 形 , 横梁箱 中的扇形 齿轮 经 常发生 轴 向移 动 , 下 导致 脱齿 , 检修起 来 十分 困难 。
抓斗PPT课件

移动和旋转
抓斗的移动和旋转动作是通过控制抓 斗的移动和旋转机构来实现的。移动 机构用于控制抓斗在水平面上的移动 ,旋转机构用于控制抓斗在垂直面上 的旋转。
VS
移动和旋转的驱动方式也有多种,常 见的有轨道驱动和轮胎驱动。轨道驱 动的移动和旋转速度较慢,但稳定性 好,适合在固定场所作业;轮胎驱动 的速度较快,适合在移动场所作业。
机械故障通常表现为抓斗动作 不灵活或卡滞。此时应检查钢 丝绳是否松动或断裂,滑轮和 铰链是否磨损严重或卡滞,如 有需要则进行更换或润滑。
钢丝绳断裂是常见的故障之一 。此时应立即停止使用,更换 新的钢丝绳,并检查是否存在 其他潜在的机械故障。
05
抓斗的安全操作规 程
操作前的准备
检查设备
确保抓斗的机械和电气部分正 常,无损坏或故障。
了解任务
熟悉作业指导书,明确抓斗操 作的目标和要求。
安全培训
所有操作人员必须经过安全培 训,了解操作规程和应急措施 。
环境评估
检查作业环境,确保没有障碍 物,作业区域安全。
操作中的注意事项
遵守操作顺序
严格按照规抓斗的额定负载,避免超载。
保持稳定
在操作过程中,保持抓斗的稳定,避免突然 的移动或动作。
06
抓斗的发展趋势和 未来展望
技术创新
智能化控制
通过引入人工智能和机器 学习技术,实现抓斗的自 主控制和智能决策,提高 作业效率和安全性。
新能源驱动
研发使用新能源(如电力 、氢能等)的抓斗,降低 传统能源消耗和排放,满 足环保要求。
遥控操作
抓斗的工作原理

工作开始时,支持钢丝绳将抓斗起吊到适当的位置上,然后放下开闭钢丝绳,这时靠下横梁的自重迫使斗部以下横梁大轴为中心将斗部打开,当斗部开至两耳板的碰块相撞时,即斗部打开到最大极限。
开斗时,上横梁滑轮和下横梁滑轮中心距加大,然后支持钢丝绳落下,将已开的抓斗,落在要抓取的松散堆积物上面,再收拢开闭钢丝绳,将上横梁滑轮与下横梁滑轮的中心距恢复到原来的位置,这样就完成了抓取物料的过程。
在闭合的斗部里已装满了物料,最后提升开闭钢丝绳,整个抓斗亦被吊起,经行车移动到所需卸料场上,开闭卸下所抓取的物料。
20,5t行车主要部分电气工作原理图
20/5t桥式主要部分电气工作原理20/5t桥式起重机经常移动的。
因此要采用移动的电源线供电,一般采用软电缆供电,软电缆可随大、小车的滑触线通过生产车间中常用的20/5t桥式起重机,它是一种用来吊起或放下重物并使重物在短距离内水平移动的起重设备,俗称吊车、行车或天车。
起重设备按结构分,有桥式、塔式、门式、旋转式和缆索式等多种,不同结构的起重设备分别应用于不同的场合。
生产车间内使用的是桥式起重机,常见的有5t、10t单钩和15/3t、20/5t双钩等。
下面以20/5t双钩桥式起重机为例分析一下20/5t桥式起重机控制线路。
20/5t桥式起重机主要由主钩(20t)、副钩(5t)、大车和小车等四部分组成。
如图10-17所示是20/5t桥式起重机的外形结构图。
1-驾驶室2-辅助滑线架3-交流磁力控制器4-电阻箱5-起重小车6-大车拖动电动7-端梁8-主滑线9-主梁图10-17 桥式起重机外形结构图20/5t桥式起重机由五台电动机组成,其主要运动形式分析如下:大车的轨道设在沿车间两侧的柱子上,大车可在轨道上沿车间纵向移动;大车上有小轨道,供小车横向移动;主钩和副钩都安装在小车上。
交流起重机的电源为380V。
由于起重机工作时是电刷引入起重机驾驶室内的保护控制盘上,三根主滑触线是沿着平行于大车轨道方向敷设在车间厂房的一侧。
提升机构、小车上的电动机和交流电磁制动器的电源是由架设在大车上的辅助滑触线(俗称拖令线)来供给的;转子电阻也是通过辅助滑触线与电动机连接的。
滑触线通常用圆钢、角钢、V形钢或工字钢轨制成。
10.6.1 20/5t桥式起重机的工作原理1.主电路分析桥式起重机的工作原理如图10-18所示。
大车由两台规格相同的电动机M1和M2拖动,用一台凸轮控制器Q1控制,电动机的定子绕组并联在同一电源上;YA1和YA2为交流电磁制动器,行程开关SQ R和SQ L作为大车前后两个方向的终端保护。
小车移动机构由一台电动机M3拖动,用一台凸轮控制器Q2控制,YA3为交流电磁制动器,行程开关SQ BW和SQ FW作为小车前、后两个方向的终端保护。
桥式抓斗小车各部分部件的工作原理

〈三〉桥式抓斗吊车的技术操作1.桥式抓斗吊车的作业程序桥式抓斗小车各部分部件的工作原理〈一〉一、ED系列电力液压推动器工作原理:〈如下图〉1.推动器电源接通,电机旋转带动叶轮转动产生压力油、推动活塞及连杆向上运动,在达到预定行程后并维持其推力。
2.电源断开,电机及叶轮停止转动不再产生压力油、活塞及连杆在外力作用下恢复原位。
二、安装与调整1.推动器出厂时,工作油液已装好,可直接使用,由于油的减少会引起推动器技术数值的改变,甚至不能启动,所以未经许可禁止打开注油螺塞或溢流螺塞。
2.推力器一般为垂直安装〈电机应在下方〉、也可倾斜或水平安装,但必须注意,倾斜或水平安装应使平衡器室朝上。
必须保证推动器整体能够摆动,活塞杆不允许承受径向力。
3.推动器连杆都可以选装,底座可做90度旋转。
ED23—ED30睇左旋转后中心高加长8mm。
4.接线时,电缆应通过填料函进入接线盒,拆下推动器接线盒盖〈反面有接线图〉,对照名牌参数按要求接好三相交流电源〈相序无要求〉及接好内外地线,(电源线电缆线规格不得大于4×2.5平方毫米)。
然后盖好接线盒盖,拧紧螺钉。
5.根据用户要求可加装时间调节阀。
调节前拧掉标“S”和“H”的盲塞,然后旋转调节螺杆进行上升时间和下降时间的无级调整。
螺杆旋进(向右旋)=行程时间增大,螺杆旋出(向左旋)=行程时间缩短。
并应注意最大调节量为20转,装有阀的推动器在出厂时行程时间以调整为5秒,调整后盲塞要拧紧。
三、使用与维护1.定期检查推力器的工作是否正常。
2.接线是否牢固,以免振动器出现短路,缺相以致烧坏电机。
3.每六个月检查一次油液,当油液变质或混入杂物时应该换油。
油液不足应补足油液(油号见注油标牌2),用户可从注油螺塞(5)加注,不得超过溢流螺塞(3)的位置。
应注意,在注油过程中,上下拉动推杆几次,以便排出空气,使油液充实油腔。
4.在工作状态下,活塞的最下端位置应与缸底保持一定距离(一般不小于5mm),否则会影响正常工作。
20-5t桥式起重机

SB
QS2
QS3
FU2
I>
I> KA5
KM3 KM1 KM2
SQ5
KV
KM3 KM1
QS4
KA0
SQ6
AC1-7
20/5t桥式起重机
1
桥式起重机:是一种用来吊起或放下重物并使重物在短距离 内水平移动的起重设备,俗称吊车、行车或天车。
起重小车
主钩 副钩 驾驶室
大车
2
一、20/5t桥式起重机主要结构和运动形式
起重小车
主钩
副钩 驾驶室
大车
大车的轨道敷设在车间两侧的立柱上,大车可在轨道上沿
车间纵向移动;大车上装有小车轨道,供小车横向移动;主钩
5
二、20/5t桥式起重机对电力拖动的要求
1. 桥式起重机的工作环境较恶劣,经常需带载启动,要求电动 机的启动转矩大,启动电流小,且有一定的调速要求,因此 多选用绕线转子异步电动机拖动,用转子绕组串电阻实现调 速。 2. 要有合理的升降速度,空载、轻载速度要快,重载速度要 慢。 3. 提升开始和重物下降到预定位置附近时,需要低速,因此 在30%额定速度内应分为几挡,以便灵活操作。 4. 提升的第一挡作为预备级,是为了消除传动的间隙和张紧 钢丝绳,以避免过大的机械冲击,所以启动转矩不能太大。 5. 为保证人身和设备安全,停车必须采用安全可靠的制动方 式,因此采用电磁抱闸制动。 6.具有完备的保护环节:短路、过载、终端及零位保护。
(2)转子电路串接不对称电阻的调速过程及调速原理 转子电路串接不对称电阻起动,能以较少数量的换接元件来得到较
多的加速级。而当电动机功率较大时,由于转子绕组电阻较小,起动 级数也随之增加。不然起动时的电流和转矩将过大,影响起动的平稳 性,还会引起机械特性的变化,在半速时转矩下降,致使不能顺利地 起动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-S13
12
D
29
E -K0 4
A1 A2 1.5 1 3 5 13 23 2 4 6 14 24 /2.1 /2.1 /2.2 /3.2 /3.5
E
F
封装
F
日期 2014/9/6 制图 审核 审核日期 1
5T抓斗桥式起重机 鑫达钢铁有限公司
替换 2 替换人 3 4
配电保护
抚顺金梁起重
5 6 7
机构代码 = 01 位置代码 + MN20140820-001 8 9 第 共 3 3 页 页
C35 X31 =12/1.3 X21 =12/1.3 X11 =12/1.3
C34
C15
E
E
F
封装
F
日期 2014/9/6 制图 审核 审核日期 1
5T抓斗桥式起重机 鑫达钢铁有限公司
替换 2 替换人 3 4
配电保护
抚顺金梁起重
5 6 7
机构代码 = 01 位置代码 + MN20140820-001 8 9 第 共 2 3 页 页
517
5 5 21
521
6 6 21
525
7 7 21
17
17
K03
/3.5 18
K04
/3.6 18
K11
/2.2 22
K22
/2.4 22
K12
/2.4 22
C
C 529 531
-07LJ1
/1.1 12
511
A1 11
519
523
A1
527
-K1
-07LJ2
/1.1 12 11
W
PE
C
-M31
K
M 3~
L 2 2 M 3 3
-Y31
M 3~
P
-M32
K
M 3~
L 8 8 M 9 9
-Y32
M 3~
P
C
+60-X61
1 1 2 1 1 1 2 1 1 1 2 1 1 1 2 1 2
1 1
+60-X61 +50-X51
7 7
+50-X51
-K11
/2.2 2 2
-K21
/2.3 2 2
/3.8 3
I>
X91 C 抚顺金梁起重设备制造有限责任公司
5
6
C
C
1LJx
/3.7
I>
I>
2LJx
/3.7
X15 4LJd
/3.8
X35 D 3LJd
/3.8
D 1LJd
/3.8
I>
I>
2LJd
/3.8
I>
I>
C14 X11 =07/1.0 X21 =07/1.0 X31 =07/1.0 X34 =10/1.2 X21 =10/1.2 X14 =10/1.2
13
Q1D2 (17) Q2D2 (18) Z3D2 (19) Z2D2 (20) Z1D2 (21)
Q0D2 (16) E
E Q2
Z3D1 Q2D1
8
Z3D2 Q2D2
14
Q2 Q1
15
Q1
9
Q1D1 Q0
10
Q1D2 Q0
16
F
封装
F
日期 2014/9/6 制图 审核 审核日期 1
5T抓斗桥式起重机 鑫达钢铁有限公司
6
7
8
9
A X34 X21 X14
封装
A
=01/2.4
=01/2.4
-X42
1
=01/2.5 2
小车控制器闭合表KTX
向后 零位
2 1 7a (1) 0 9 (2) 61 (4) C X14 (7) 1 2
B
7 6 9 6 7 8 9 8
向前
3 4 5
B
5
4
3
C 抚顺金梁起重设备制造有限责任公司
-X42 +50-X51 +60-X61
替换 2 替换人 3 4
配电保护
抚顺金梁起重
5 6 7
机构代码 = 01 位置代码 + MN20140820-001 8 9 第 共 1 3 页 页
修改
修改 0
日期
姓名
0
1
2
3
4
5
6
7
8
9
A
封装
A
1.2 X1
1.2 X2 3 4
1
1.2 X3 5
B
-K0
/3.8 2 6
-H2
x1 x2
B
4
X211 +40-X44 LJ
-X22
2 PE 1
=01+40-X44
8
C -X11
2
-X12
2 1
93
91
97
1
1
1
PE
x2
-H20
x1
D
x1
D
x1 x1 x1
-E20
x2
-E21
x2
-E22
x2
-E23
x2
=01+40-X44 =01+40-X44 E =01-X91 88
=01/1.7 9 10 11 9 10 11
13
=01-X91
F
封装
F
日期 2014/9/11 制图 审核 审核日期 1
5T抓斗桥式起重机 鑫达钢铁有限公司
替换 2 替换人 3 4
抓斗机构
抚顺金梁起重
5 6 7
机构代码 = 07 位置代码 + MN20140820-001 8 9 第 共 2 4 页 页
修改
修改 0
日期
姓名
修改
修改 0
日期
姓名
0
1
2
3
4
5
6
7
8
9
A
封装
A
-K0 3
13 1.4 /3.8 14
61
11
-X91
19
5
3
10-S40
6 13
10-S40
4
-S94
12
25 -X91 1LJf
12 22 11
33
-S11
14
63 7
11
65
15 11
23
11
11
11
B
+40-X44 10-S91
14 11
4LJd
X31
-Q11 I> B
2
I>
4
I>
6
B +50-X51 +60-X61
4 4 5 5 6 6
+50-X51 +60-X61
10 10
11 11
12 12
C 抚顺金梁起重设备制造有限责任公司
-07LJ1
/2.1
I>
I>
-07LJ2
/2.1
-07LJ3
/2.1
I>
I>
-07LJ4
/2.1
U
V
W
PE
U
V
替换 2 替换人 3 4
大车机构
抚顺金梁起重
5 6 7
机构代码 = 12 位置代码 + MN20140820-001 8 9 第 共 1 1 页 页
修改
修改 0
日期
姓名
0
1
2
3
4
5
6
7
8
9
A X11 X21 X31 X11
封装
A
=01/2.1 =01/2.1 =01/2.2 1 3 5
2.0
2.0
/1.1 /1.2 /1.2 /3.3 /2.2
1 1 1 13 21
2 2 2 14 22
/1.2 /1.3 /1.3 /3.3 /2.4
1 1 1 13 21
2 2 2 14 22
/1.3 /1.3 /1.3 /3.4 /2.4
1 3 5 13
2 4 6 14
/1.6 /1.6 /1.6 /3.5
修改
修改 0
日期
姓名
0
1
2
3
4
5
6
7
8
9
A
封装
大车控制器闭合表KTD
X31 X21
=01/2.7 =01/2.8 =01/2.8
A
X11
向后
5 4 3 2 1
零位
0 13 (1) 69 (3) 71 (5) Q1D1 (7) Q0D1 (6) 15 (2) 73 (4) 1 2
向前
3 4 5
-X43 B
2 4 6 1 1 1 13 14 /2.1 2 2
505
3 3 3 5 17 17
3.1
505
-K01
/3.2 18
K02
/3.3 18
B 开
503
B
3 4 5 6
1
07-S40.2 闭 C 抚顺金梁起重设备制造有限责任公司
2
509 +40-X41 -X91 -K21
/2.3 11 22 4 4 21
修改
修改 0
日期
姓名
0
1
2
3
4
5
6
7
8
9
A
封装
A
95
=01/1.7