(10K)EM流程
OMRON欧姆龙 电气元件型号编码规则以及组件车间使用元件实例讲解1

www. cecep. cn
1.4 光电传感器的型号标准
E3/F3=表示光电传感器 到E3□□-为止的3~4个字母称为型名 (E3S-A、E3S-B、E3S-C、E3G-L是例外的型名) -之后的部分称为号名 T =对射型 R或RS =回归反射型 D或DS =扩散反射型 LS =距离射定型 G或GS =凹槽型
E3S-CL
E3F2
E3JM/E3JK
聚合点滴 创生无限 Going Green, Investing Green
www. cecep. cn
圆柱形光电开关
+
放大器内藏方形光电开关 ——E3JK/E3JM系列
——E3F2/3系列
聚合点滴 创生无限 Going Green, Investing Green
聚合点滴 创生无限 Going Green, Investing Green
www. cecep. cn
聚合点滴 创生无限 Going Green, Investing Green
www. cecep. cn
聚合点滴 创生无限 Going Green, Investing Green
www. cecep. cn
www. cecep. cn
第二章 变频器
2.1 变频器产品型号 • • • • • • • OMRON变频器包括以下系列产品。 3G3FV变频器(高性能型) 3G3RV变频器(新型,高性能型) 3G3HV变频器(通用型,泛用型) 3G3EV变频器(通用型,经济型) 3G3MV变频器(通用型,恒转矩,网络型) 3G3JV变频器(通用型,经济型,可网络型)
www. cecep. cn
3.3.1 CJ2 CPU单元
聚合点滴 创生无限 Going Green, Investing Green
EM231模块用户手册
声明Copyright ©2008深圳市合信自动化技术有限公司版权所有,保留一切权利。
非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本书内容的部分或全部,并不得以任何形式传播。
TrustPLC EM231 NTC混合模拟量输入扩展模块用户手册1.用途EM231 NTC混合模拟量输入扩展模块(订货号:231-7ND32,后面简称“EM231 NTC模块”)是CTSC-200 PLC系统的模拟量扩展模块,提供4通道模拟量采集,其中两通道用于连接热敏电阻NTC温度传感器或热电阻PT100温度传感器,另外两个通道用于采集电压/电流信号输入,所有通道的输入精度(含符号位)均为16BIT。
主要用于灭菌设备或中央空调设备等既有温度测量需求又有压力信号测量需求的场合。
2.产品规格功能规格项目CTS7 231-7ND32电源总线电源消耗0.12WL+ 37mAL+电压范围20.4-28.8VDCLED指示灯电源指示良好ON=24VDC供电正常,OFF=无24VDC供电SF:ON=模块故障,闪烁=输入信号错误,OFF=无错输入信号热电阻/热敏电阻输入范围热电阻类型(任选一种):Pt-100 (3850ppm,3920ppm,3850.55ppm,3916ppm 3902ppm) NTC(R25=10kΩ B=3950, R25=10kΩB=3435)电压输入-5V~5V,-10V~10V,0V~5V,0V~10V 电流输入0~20mA输入点数4,2PT100/2NTC和2AI隔离特性现场至逻辑500VAC现场至24VDC 500VAC24V到逻辑500VAC共模抑制>120dB@120VAC采样性能温度分辨率0.1℃/0.1℉电压分辨率15位+符号位测量原理Sigma-Delta模块更新时间(所有通道)425ms到传感器的导线长度最大100米导线回路电阻20Ω噪声抑制85dB@50Hz/60Hz/400Hz数据字格式温度(NTC:R25=10kΩ, B=3950K):-400~1200(仅限通道1、2)温度(NTC:R25=10kΩ, B=3435K):-400~1500(仅限通道1、2)温度(PT100):-500~2000(仅限通道1、2)电压/电流:单极性0~32000,双极性-32000~+32000(仅限通道3、4)输入阻抗电压输入>10MΩ;电流输入=250Ω;NTC输入>10MΩ最大输入电压30VDC(检测),5VDC(源)输入滤波衰减-3dB@21kHz基本误差0.05%FS(电阻)重复性0.1%FS3.应用环境l工作温度:水平安装0-55℃,垂直安装0-45℃;l工作湿度:95%非冷凝湿度4.使用方法EM231 NTC模块用于扩展CTSC-200 PLC系统CPU模块的模拟量测量能力,通过总线接口与CPU 模块连接。
EM7644SU16AxP-70LFx 4Mx16 伪静态RAM 产品规格说明说明书

Document Title4M x 16 bit Pseudo SRAM SpecificationRevision HistoryRevision No. History Date Remark0.0-.Initial Draft Feb.202009Preliminary0.1-.Standby current(ISB) updated from TBD to 150uA Oct.152009Jul.920100.2-.Temperature option code is updated in the Memoryfunction guide of the last page.=> Extended is deleted, blank means wireless(-30℃ ~ 85℃)0.3-.Power supply voltage changed from 2.6V~3.3V to 2.6V~3.6V Jul.282010Emerging Memory & Logic Solutions Inc.3F Korea Construction Financial Cooperative B/D, 301-1 Yeon-Dong, Jeju-Si, Jeju-Do, Rep.of Korea Zip Code : 690-717Tel : +82-64-740-1700 Fax : +82-64-740-1749~1750 / Homepage : The attached datasheets are provided by EMLSI reserve the right to change the specifications and products. EMLSI will answer to your questions about device. If you have any questions, please contact the EMLSI office.4Mb x16 Pseudo Static RAM SpecificationGENERAL DESCRIPTIONThe EM7644SU16AxP is 67,108,864 bits of Pseudo SRAM which uses DRAM type memory cells, but this device has refresh-free operation and extreme low power consumption technology. Furthermore the inter-face is compatible to a low power Asynchronous type SRAM. The EM7644SU16AxP is organized as 4,194,304 Words x 16 bit.FEATURES- Organization :4M x16- EM7644SU16ALP support 8 page mode & DPD - Power Supply Voltage : 2.6 ~ 3.6V- EM7644SU16AMP support 8 page mode & Non-DPD - Separated I/O power(VccQ) & Core power(Vcc)- EM7644SU16ANP support 16 page mode & DPD - Three state outputs- EM7644SU16APP support 16 page mode & Non-DPD - Byte read/write control by UB# / LB#- EM7644SU16ARP support Non-page mode & DPD - Auto-TCSR for power saving - EM7644SU16ASP support Non-page mode & Non-DPD- Package type : 48-FPBGA 6.0x7.0- Operating Temperature . Wireless : -30℃ ~ 85℃ . Industrial : -40℃ ~ 85℃PRODUCT FAMILYPart NumberOperating Temp.Power SupplySpeed(t RC )Power DissipationStandby(I SB , Max.)Operating I CC ( Max.)I CC1( f = 1MHz)I CC2( f = f max )EM7644SU16AxP-70LF -30℃ to 85℃ 2.6V to 3.6V 70ns 150uA 5mA 50mA EM7644SU16AxP-70LFI-40℃ to 85℃2.6V to3.6V70ns150uA5mA50mAFUNCTION BLOCK DIAGRAMCOLUMN SELECTI/O CIRCUITMemory Array 4M X 16R O W S E L E C TSelf-Refresh CONTROLCONTROL LOGICADDRESS DECODERDin/Dout BUFFERDQ0~DQ15A0~A21ZZ#CS#UB#LB#WE#OE#PIN DESCRIPTION ( 48-FBGA-6.00x7.00 )TOP VIEW (Ball Down)Note: ZZ# pin is replaced to NC pin in EM7644SU16AMP , EM7644SU16APP , EM7644SU16ASP .Name Function Name Function CS# Chip select input LB# Lower byte (DQ 0~7) OE# Output enable input UB# Upper byte (DQ 8~15) WE# Write enable input VCC Power supply ZZ#Low power controlVCCQI/O power supplyDQ 0-15 Data in-out VSS(Q) Ground A 0-21 Address inputs NCNo connectionDNUDo not useLB#OE#A0A1A2ZZ#DQ8UB#A3A4 CS#DQ0DQ9DQ10A5A6DQ1DQ2VSSQDQ11A17A7DQ3VCCVCCQ DQ12A21A16DQ4VSSDQ14DQ13DQ5DQ6A15A14DQ15A19A20A12A13DQ7WE#A18A8A9A10A11123456ABC DEFGHABSOLUTE MAXIMUM RATINGS 1)1. Stresses greater than those listed above “Absolute Maximum Ratings” may cause permanent damage to the device.Functional operation should be restricted to recommended operating condition. Exposure to absolute maximum rating conditions for extended periods may affect reliability.2. Undershoot at power-off : -1.0V in case of pulse width < 20nsParameterSymbol RatingsUnit Voltage on Any Pin Relative to Vss V IN , V OUT -0.2 to V CCQ +0.3 V Voltage on Vcc supply relative to Vss V CC , V CCQ -0.22) to 3.9 V Power Dissipation P D 1.0 WStorage Temperature T STG -65 to 150 oC Operating TemperatureWireless T A-30 to 85 o C Industrial-40 to 85oCFUNCTIONAL DESCRIPTIONNote:1. X means don’t care. (Must be low or high state)2. This Low Power mode is supported in EM7644SU16ALP, EM7644SU16ANP & EM7644SU16ARP.CS#ZZ#OE#WE#LB#UB#DQ 0~7DQ 8~15Mode Power H H X X X X High-Z High-Z Deselected Stand by X L X X X X High-Z High-Z Deselected Low Power Mode*2)L H H H L X High-Z High-Z Output Disabled Active L H H H X L High-Z High-Z Output Disabled Active L H L H L H Data Out High-Z Lower Byte Read Active L H L H H L High-Z Data Out Upper Byte Read Active L H L H L L Data Out Data Out Word Read Active L H X L L H Data In High-Z Lower Byte Write Active L H X L H L High-Z Data In Upper Byte Write Active LHXLLLData InData InWord WriteActiveDC AND OPERATING CHARACTERISTICS1. Maximum Icc specifications are tested with V CC = V CCmax.ParameterSymbol Test ConditionsMin Typ Max Unit Input leakage current I LI V IN =V SS to V CCQ , V CC=V CCmax-1-1uA Output leakage currentI LOCS#=V IH , ZZ#=V IH , OE#=V IH or WE#=V IL ,V IO =V SS to V CCQ , V CC=V CCmax-1-1uAAverage operating currentI CC1Cycle time = 1us, I IO =0mA, 100% duty,CS#<0.2V, ZZ#>V CCQ -0.2V, V IN <0.2V or V IN >V CCQ -0.2V--5mAI CC2Cycle time = Min, I IO =0mA, 100% duty,CS#=V IL , ZZ#=V IH , V IN =V IL or V IH --50mA Page access operating currentI CCP tPC = Min,CS#=V IL , ZZ#=V IH , I IO =0mA, Page add. cycling.--25mA Output low voltage V OL I OL = 0.5mA, V CC=V CCmin --0.2*V CCQV Output high voltageV OH I OH = -0.5mA, V CC=V CCmin0.8*V CCQ--VStandby current (CMOS)I SBCS#,ZZ#>V CCQ -0.2V, Other inputs = 0 ~ V CCQ (Typ. condition : V CC =3.0V @ 25o C)(Max. condition : V CC =3.6V @ 85o C)--150uARECOMMENDED DC OPERATING CONDITIONS1. Overshoot: V CC +1.0 V in case of pulse width < 20ns2. Undershoot: -1.0 V in case of pulse width < 20ns3. Overshoot and undershoot are sampled, not 100% tested .Parameter Symbol Min Typ Max Unit Supply voltage V CC 2.6 3.0 3.6 V V CCQ 2.6 3.0 3.6 V GroundV SS , V SSQ 0 0 0VInput high voltage V IH 0.8 * V CCQ - V CCQ + 0.21) V Input low voltageV IL-0.22)- 0.2 * V CCQVCAPACITANCE 1) (f =1MHz, T A =25o C)1. Capacitance is sampled, not 100% testedItemSymbol Test ConditionMin Max Unit Input capacitance C IN V IN =0V -8pF Input/Output capacitanceC IOV IO =0V-8pFNOTES1. These parameters are not supported in EM7644SU16ARP & EM7644SU16ASP.Parameter ListSymbol Speed Unit Min Max ReadRead Cycle Time t RC 7010k ns Address access time t AA -70ns Chip enable to data output t CO -70ns Output enable to valid output t OE -25ns UB#, LB# enable to data output t BA -25ns Chip enable to low-Z outputt LZ 10-ns UB#, LB# enable to low-Z output t BLZ 0-ns Output enable to low-Z output t OLZ 0-ns Chip disable to high-Z output t HZ 020ns UB#, LB# disable to high-Z output t BHZ 020ns Output disable to high-Z outputt OHZ 020ns Output hold from Address change t OH 5-ns Write Write Cycle Timet WC 7010k ns Chip enable to end of write t CW60-ns Address setup timet AS 0-ns Address valid to end of write t AW 60-ns UB#, LB# valid to end of writet BW 60-ns Write pulse width t WP 50-ns Write recovery time t WR 0-ns Write to output high-Z t WHZ 020ns Data to write time overlap t DW 20-ns Data hold from write time t DH 0-ns End write to output low-Z t OW 5-ns PageMaximum cycle timet MRC *1)-10k ns Page mode cycle timet PC *1)25-ns Page mode address access timet PAA *1)-25nsAC OPERATING CONDITIONSTest Conditions (Test Load and Test Input/Output Reference)Input Pulse Level : 0.2V to V CCQ -0.2V Input Rise and Fall Time : 5nsInput and Output reference Voltage : V CCQ /2Output Load (See right) : CL 1) = 30pF 1. Including scope and Jig capacitanceCL 1)AC CHARACTERISTICSDoutTIMING DIAGRAMSAddressCS#LB#, UB#OE#Data Outt CO t OH t BA t OEt BHZ t OHZData Vaildt OLZ t BLZ t LZt AAt HZ READ CYCLE (2) (ZZ#=WE#=V IH )NOTES (READ CYCLE)1. t HZ , t BHZ and t OHZ are defined as the time at which the outputs achieve the open circuit conditions and are not referenced to output voltage levels.2. Do not Access device with cycle timing shorter than t RC for continuous periods > 10us.READ CYCLE (1) (Address controlled, CS#=OE#=V IL , ZZ#=WE#=V IH , UB# or/and LB#=V IL )t RCAddresst AAData OutData Validt OHPrevious Data ValidHigh-Zt RCPAGE READ CYCLE (1) (ZZ#=WE#=V IH , 8 Words access)t MRCAddress t RCHigh-ZData ValidData ValidData ValidData ValidData Valid(A21~A3)Address (A2~A0)t PCt PCt PC t PCCS#LB#,UB#OE#DataOutt AA t COt BAt OEt OLZt BLZ t LZt PAAt PAAt PAA t PAAt OHZt BHZt HZt OHNOTES (READ CYCLE)1. t HZ , t BHZ and t OHZ are defined as the time at which the outputs achieve the open circuit conditions and are not referenced to output voltage levels.2. Do not Access device with cycle timing shorter than t RC for continuous periods > 10us.3. This page read cycle(8 page mode) is supported in EM7644SU16ALP & EM7644SU16AMP.~~~~~~~~~~~~~~~~~~PAGE READ CYCLE (2) (ZZ#=WE#=V IH , 16 Words access)t MRCAddress t RCHigh-ZData ValidData ValidData ValidData ValidData Valid(A21~A4)Address (A3~A0)t PCt PCt PC t PCCS#LB#,UB#OE#DataOutt AA t COt BAt OEt OLZt BLZ t LZt PAAt PAAt PAA t PAAt OHZt BHZt HZt OHNOTES (READ CYCLE)1. t HZ , t BHZ and t OHZ are defined as the time at which the outputs achieve the open circuit conditions and are not referenced to output voltage levels.2. Do not Access device with cycle timing shorter than t RC for continuous periods > 10us.3. This page read cycle(16 page mode) is supported in EM7644SU16ANP & EM7644SU16APP.~~~~~~~~~~~~~~~~~~t WR t WC Address CS#LB#,UB#WE#Data Int CWt AW t BWt WPt ASt DW t DHWRITE CYCLE (1) (WE# controlled, ZZ#=V IH )Data ValidHigh-ZData UndefinedData Outt OWt WHZt WRt WCAddressCS#LB#,UB#WE#Data In t CWt AWt BW t WPt ASt DWt DHWRITE CYCLE (2) (CS# controlled, ZZ#=V IH )Data ValidHigh-ZData Outt WRt WCAddressCS#LB#,UB#WE#Data In t CWt AWt BW t WPt ASt DWt DHWRITE CYCLE (3) (UB#/LB# controlled, ZZ#=V IH )Data ValidHigh-ZData OutNOTES (WRITE CYCLE)1. A write occurs during the overlap(t WP ) of low CS#, low WE# and low UB# or LB#. A write begins at the lasttransition among low CS# and low WE# with asserting UB# or LB# low for single byte operation or simultaneouslyasserting UB# and LB# low for word operation. A write ends at the earliest transition among high CS# and high WE#. The t WP is measured from the beginning of write to the end of write.2. t CW is measured from CS# going low to end of write.3. t AS is measured from the address valid to the beginning of write.4. t WR is measured from the end of write to the address change. t WR applied in case a write ends as CS# or WE# going high.5. Do not access device with cycle timing shorter than t WC for continuous periods > 10us.LOW POWER MODESDeep Power Down Mode Entry/Exitt CSZZCS#ZZ#t ZZCSDeep Power Down Entry t RDeep Power Down ExitNormaloperation~~~~t ZZPLow Power Mode CharacteristicsParameter Description Min.Max.Units t ZZCS ZZ# low to CS# low 0-ns t CSZZ CS# high to ZZ# high 0-ns t R Operation Recovery Time200-us t ZZPZZ# pulse width20-nsParameter Symbol Test ConditionsMin Typ Max Unit Deep Power DownCurrentI ZZZZ# < 0.2V, Other inputs = 0 ~ V CCQ(Max. condition : V CC =3.6V @ 85o C)--10uA~~NOTES ( DEEP POWER DOWN )1. During Deep Power Down mode, all referesh related activity are disabled.2. This DPD mode is supported in EM7644SU16ALP, EM7644SU16ANP & EM7644SU16ARP.TIMING WAVEFORM OF POWER UPV CCCS#ZZ#NOTE ( POWER UP )1. After Vcc reaches Vcc(Min.) , wait 200us with CS# high. Then you get into the normal operation.2. ZZ# pin is replaced to NC pin in EM7644SU16AMP, EM7644SU16APP, EM7644SU16ASP.#A1eD0.66 T y p .A 1A 2A 3A AB CD EF G H654321D D1EE 1D/2E 1/2DEPACKAGE DIMENSION48 Ball Fine Pitch BGA (0.75mm ball pitch)Bottom ViewTop ViewDbcccNOTES.1. Bump counts : 48(8row x 6column)2. Bump pitch : (x,y)=(0.75x0.75) (typ.)3. All tolerance are +/-0.050 unless otherwise specified.4. Typ : Typical5. ccc is coplanarity : 0.08(Max)Side ViewDetail AA1 index MarkUnit: millimeterseDeEA1MinTyp Max A -- 1.00A10.22-0.32A2-0.21-A3-0.45-b 0.32-0.42D 5.90 6.00 6.10E 6.907.007.10D1- 3.75-E1- 5.25-eE -0.75-eD -0.75-ccc--0.08A 2+A 3MEMORY FUNCTION GUIDE1. Memory Component9. OptionBlank---------------No optional mode2. Device Type J ---------------Non-RBC 6---------------Low Power SRAM K ---------------RBC7---------------STRAM L ---------------8 page mode / DPDC ---------------CellularRAM M ---------------8 page mode / Non-DPD N ---------------16 page mode / DPD3. Density P ---------------16 page mode / Non-DPD 4--------------- 4MR ---------------Non-page mode / DPD8--------------- 8M S ---------------Non-page mode / Non-DPD 16--------------- 16M 32--------------- 32M 10. Package64--------------- 64M Blank---------------Wafer28---------------128MS ---------------32 sTSOP1T ---------------32 TSOP14. Function U ---------------44 TSOP22---------------Multiplexed async.P ---------------48 FPBGA 3---------------Multiplexed sync.Z ---------------52 FPBGA 4---------------Demultiplexed async.Y ---------------54 FPBGA 5---------------Multiplexed sync.W ---------------60 FPBGA 6---------------Demultiplexed sync.V ---------------90 FPBGA 5. Technology 11. Speed(@async.)S ---------------Single Transistor 45--------------- 45ns 55--------------- 55ns 6. Operating Voltage 60--------------- 60ns U ---------------2.6V ~ 3.6V 70--------------- 70ns P ---------------1.7V ~ 1.95V 85--------------- 85ns 90--------------- 90ns 7. Organization 10---------------100ns 8--------------- X8 bit 12---------------120ns16---------------X16 bit 32---------------X32 bit 12. Power LL ---------------Low Low Power8. VersionLF ---------------Low Low Power(Pb-free & Green)Blank---------------Mother dieL ---------------Low PowerA ---------------2 nd generation S ---------------Standard PowerB ---------------3 rd generationC ---------------4 th generation 13. TemperatureD ---------------5 th generationBlank---------------Wireless (-30℃ ~ 85℃)I ---------------Industrial (-40℃ ~ 85℃)EMX XX XXX XX XXX -XX XX X13. Temperature1. EMLSI Memory 12. Power 2. Device Type 11. Speed3. Density 10. Package4. Function 9. Option5. Technology 8. Version6. Operating Voltage7. Organization。
EM-324-SPF定位驱动器说明书
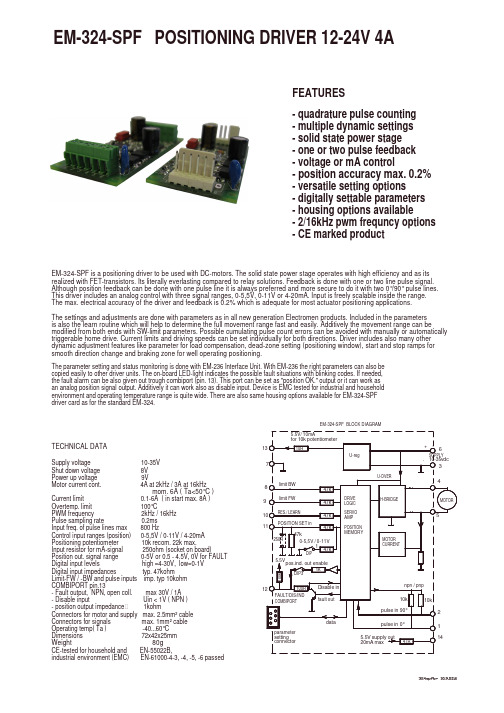
EM-324-SPF is a positioning driver to be used with DC-motors. The solid state power stage operates with high efficiency and as its realized with FET-transistors. Its literally everlasting compared to relay solutions. Feedback is done with one or two line pulse signal. Although position feedback can be done with one pulse line it is always preferred and more secure to do it with two 0°/90° pulse lines. This driver includes an analog control with three signal ranges, 0-5,5V, 0-11V or 4-20mA. Input is freely scalable inside the range.The max. electrical accuracy of the driver and feedback is 0.2% which is adequate for most actuator positioning applications.The settings and adjustments are done with parameters as in all new generation Electromen products. Included in the parameters is also the learn routine which will help to determine the full movement range fast and easily. Additively the movement range can be modified from both ends with SW-limit parameters. Possible cumulating pulse count errors can be avoided with manually or automatically triggerable home drive. Current limits and driving speeds can be set individually for both directions. Driver includes also many other dynamic adjustment features like parameter for load compensation, dead-zone setting (positioning window), start and stop ramps for smooth direction change and braking zone for well operating positioning.The parameter setting and status monitoring is done with EM-236 Interface Unit. With EM-236 the right parameters can also be copied easily to other driver units. The on-board LED-light indicates the possible fault situations with blinking codes. If needed, the fault alarm can be also given out trough combiport (pin. 13). This port can be set as "position OK." output or it can work as an analog position signal output. Additively it can work also as disable input. Device is EMC tested for industrial and household environment and operating temperature range is quite wide. There are also same housing options available for EM-324-SPF driver card as for the standard EM-324.TECHNICAL DATAEM-324-SPF BLOCK DIAGRAM5.5V/ 10mAEM-324-SPF POSITIONING DRIVER 12-24V 4A-quadrature pulse counting -multiple dynamic settings -solid state power stage -one or two pulse feedback -voltage or mA control-position accuracy max. 0.2%-versatile setting options -digitally settable parameters -housing options available -2/16kHz pwm frequncy options -CE marked productFEATURESSupply voltage 10-35V Shut down voltage 8V Power up voltage 9VMotor current cont.4A at 2kHz / 3A at 16kHzmom. 6A ( Ta<50°C )Current limit 0.1-6A ( in start max. 8A )Overtemp. limit 100°C PWM frequency 2kHz / 16kHz Pulse sampling rate 0.2ms Input freq. of pulse lines max 800 HzControl input ranges (position) 0-5,5V / 0-11V / 4-20mA Positioning potentiometer 10k recom. 22k max.Input resistor for mA-signal 250ohm (socket on board)Position out. signal range 0-5V or 0.5 - 4.5V, 0V for FAULT Digital input levels high =4-30V, low=0-1V Digital input impedances typ. 47kohm Limit-FW / -BW and pulse inputs imp. typ 10kohm COMBIPORT pin.13- Fault output, NPN, open coll. max 30V / 1A - Disable input Uin < 1V ( NPN )- position output impedance 1kohmConnectors for motor and supply max. 2.5mm² cable Connectors for signals max. 1mm² cable Operating temp( Ta ) -40...60°C Dimensions 72x42x25mm Weight 80g CE-tested for household and EN-55022B,industrial environment (EMC) EN-61000-4-3, -4, -5, -6 passedFull rangeFull range is the full mechanical movement of the linear motor or positioning system. At first it is always needed to determine the full range before it ispossible to drive the system. When the full range is determined it is also set to correspond the selected and set control range that can be for example 0-5V.Position feedback is received as pulses, and full range is determined as the number of pulse edges received during the full movement from start to end.If this number is known it can be set as the value of parameter 25 (Full range).Position feedbackSelect 1 or 2 pulselines with parameter 1 according to your application.The position information has more risk to be corrupted when controller is used with one pulse line, as the signal does not have information about the direction of the movement. For example in fast direction change with difficult loads few pulses are more easily counted to wrong direction.So it is recommended to use two pulse lines (0° and 90°) when ever available.TAKING IN TO USEThe setting of the controller is done with parameters, and the parameters can be set and edited with EM-236 Interface Unit. Making changes is easy and precise. Copying the parameters to multible units is simple and accurate. The same parameters that are saved to one unit can be copied to an other unit with one push of a button. After the two first parameters have been setaccording to the application, the actuator and control wires can be connected and operation can be adjusted with the remaining parameters.Learn routineLearning is a special option for finding the full range and taking the system in use with out knowing the number of pulses for full range. Learn routine is selected with par.14 val.7. and started with 5s command to RES/LEARN input.Learn routine will drive the motor forward (FW) untill it reaches the outer end then it starts the motor backwards (BW) and drives to inner end. During this routine the driver "learns" the number of pulse edges for full range and also retrieves the absolute position by resetting the counter in the inner end.After learn routine is done the driver can be used for positioning and par 14 should be set to some suitable value for normal use of the application.Notice: Learn routine is ran to the hard end (or to the limit switches if wired).Notice: To see the learned and right number of the full range pulse edges,you have to down load (OK to Load&Edit) the parameters from driver with EM-236 Interface Unit once again. Or if you are wieving the par.25 while learn routine you can try to change the value and the EM-236 Interface unit will first display the learned range. After this its possible to edit this reading.Positioning dynamics (continued on the next page)Dead zone (par.17) is to determine the accuracy of positioning.This parameter has the major effect to positioning accuracy.The smaller it is determined the more accurately the positioning is done. Notice. If it is set too small compared to accuracy level of the mechanics an oscillation or unstability in positioning will occur.Braking zone (par. 18) is used to optimize the time needed for positioning.Too high value slows down too early, and too low value will cause an fast position passing and needs a corrective return driving.Two pulse,quadrature pulsesoffers also the direction informationOne pulse mode includesno direction informationPulse edges of 1 and 2 pulse linesHome runThe position feedback is received as pulses so the driver can not know the righ position before its pulse counter is reset in some known position.Home run command will drive the motor to selected end of the full range and there it will reset the pulse edge counter. Before the positioning can be used the home run must be done. After home run the position is saved to the drivers memory and will be valid even after the power is cut off and restored.Home run is configured with parameter 14, values 1 or 2.CONNECTION ADVICESupply voltage should be in the limits of 10-35Vdc.Ripple should be lower than 30% even with max. load.NOTICES !1.Wrong supply polarity can cause damage the device.2.There is no inbuilt fuse in this device. Use an external fuse which is chosen according to your application.3.that function and scale of some of the input and output terminals is depending on the selected parameter values and defined ranges.Please, see the parameter list and explanations.Control range settingOptions for max. ranges are 0 to 5,5V, and 4 to 20mA if you place a 250ohm resistor to the resistor socket on the driver board.Using 0 to 11V range requires you to set the DIP switch 1 to "ON" position.Your individual control scale you can either set with parameters 21 and 22 as Volts or you can let the driver to measure your min. and max. control values.If you choose to set the min. and max. as Volts, pls. notice that the values arein ratio to the lowest range 0-5,50V, and with 0-11V range you have to divide the actual voltage with two. With current signal the right value is I x 250. Eg: 4-20mA = 1,0 - 5,0V.Most accurate way is to let the driver to measure the values. So first connect and adjust minimum value to set input (pin.12) and change the par.21 to val. 551,after value stops blinking the dispaly shows the measured value. Then adjust the maximum control value to pin.12, and change par.22 to 551. After a while you will see the measured value in display. Always remember to to save with long push to save button, before disconnecting EM-236 and taking power off from the driver.Notice: If control min. value is set higher than max. value the movement range will be inverted and set accordingly.Auto homeAuto home is an automated home run that is triggered during normal operation when ever the motor is run to the FW or BW end switch or close to the sofware end limit (SW-limit). Well configured auto home can effectively preventcumulating position error. Its specially useful when working with only one feedback pulse line. Auto home configures with par. 14 (values 3,4,5 or 6). Notice. The auto-home will be ran to the hard end (or to the limit switches if wired).If you choose the auto-home triggered from limit switch inputs or SW-limits, the option of using the 5seconds command to RES/LEARN input is also available.Adjustment and settingsParameter setting is done with EM-236 Interface Unit, which is connected to a powered driver unit to the red connector.During the start up routine the Interface Unit will display information about itself and then the name and program version of the target device. Then it will stay on displaying EDIT & LOAD. Pushing the "yes" button will up load and show the parameter list of the controller.Now the user can scroll the parameters with arrows, and make value changes with + and - buttons. Edited value is effective after few seconds when the value stops blinking. But notice, that the change will not be saved untill you give a long push (>2s) to the "save" button.This will save the values to the EM-236s memory also. Now it is easy to copy the same values to an other driver. Just connect the unit to a powered driver and after the start up routine just press a long "save". You can repeat this untill all needed units have been configured.LIST OF PARAMETERS prog. v1.3 ( defaults in parentheses) 1 Feed-back mode : one-pulse=1, dual-pulse=2 ( 1 )2 Limit and pulse input logic ( 1 )1= limit inputs PNP / pulse inputs PNP 2= limit inputs PNP / pulse inputs NPN3= limit inputs PNP inverted / pulse inputs PNP 4= limit inputs PNP inverted / pulse inputs NPN 3 Speed FW: 20-100% / 0-100 ( 100 )4 Speed BW: 20-100% / 0-100 ( 100 )5 Speed HOME/LEARN: 20-100% / 20-100 ( 60 )6 Current limit out, FW: 0.1-6A / 1-60 ( 30 )7 Current limit in, BW: 0.1-6A / 1-60 ( 30 )8 Current trip delay: 0-255ms / 0-255 ( 100 ) (0 = tripp not in use)9 Combiport (pin 13) function: 1-4 ( 1 )1= used as Fault out / Disable in (fault/dis=0V) 2= gives the "on position" data (on pos=0V) 3= gives position info out with 0-5V 4= gives position info with 0.5-4.5V and fault =0V 10 Over voltage limit: 15-40V / 15-40 ( 35 )11 Load compensation: 0-255 / 0-255 ( 0 )12 Time out: 1-255s. / 1-255 ( 0= not in use ) ( 0 )13 Hour and start counter reset ( 0 )set value = 1 and press SAVE -> hour and start counter reset 14 Home run / learn function: 1-7 ( 1 )1= Home run with RES / LEARN input to BW direction ( >5s. comm. ) 2= Home run with RES / LEARN input to FW direction ( >5s. comm. ) 3= Auto-Home from BW LIMIT input to BW direction ( pin 9 ) 4= Auto-Home from FW LIMIT input to FW direction ( pin 10 ) 5= Auto-Home triggered with inner soft limit to BW direction 6= Auto-Home triggered with outer soft limit to FW direction7= Learn routine with >5s command to RES /LEARN input (pin.11)15 Disable input configuration ( 0 )0= Disable only to pin.13, 1=disable to pin.10, 2=disable to pin.916 Not in use17 Dead zone : 0,2-5% / 2-50 ( 10 )18 Braking zone : 1-8% / 1-8 ( 3 )19 Start ramp : 0.1-2.5s / 0-25 ( 10 )20 Stop ramp : 0.1-2.5s / 0-25 ( 3 )21 Set value min: 0...5.50V / 0-551 (0)22 Set value max: 0...5.50V / 0-551 (550)For parameters 21 and 22 value 551 will do an auto setting 23 Inner (BW) SW-limit: 0...+50% / 0-500 ( 5 ) 24 Outer (FW) SW-limit: 0...-50% / 0-500 ( 5 ) 25 Full range (pulse edges) 100-65535 / 100-65535 ( 1000 )26 PWM frequency 1 = 2kHz, 2=16kHz ( 1 )Start and stop ramp (par. 19 & 20) are to smoothen the direction change. Often suitable value for stop ramp is half of start ramp. Too long stop ramp can make the direction change too time consuming and too short can cause mechanical stress and non desired agressivity.Load compensation (par.11) when set to right value, will ensure theneeded force to start driving and to taking the load in to the right position. With high load and too low load compensation value, the motor dont have force enough to reach the right position. Start testing with zero value and increase value untill motor behaves unstable and twitching. Thumb rule in this point is to decrease the value with 25%.Current limits should be set according to the motor nominal max. current or according to the required current of the application (if lower than nom).IndicationsFault situations are indicated with coded blinking of the red LED. Fault alarm can be forwarded out trough combiport (pin.13).Fault situation is reset with a short (<5s) command to RES/LEARN input (pin.11). Some faults are reset automatically with a new position command to opposite direction.Instead of fault indication the combiport can be set to indicate the status of the positioning as an "on position" output, or it can be set to give an analog position information with 0-5V or 0.5-4.5V signal. Configuration of the combiport is done with par.9. Notice: If it is set to give analog information out (par.9 val3/4), also the DIP-switch 3 should be set to ON position.If Combiport (pin 13) is selected to be fault output, it will also work as disable input when externally pulled down. If this terminal is selected to be used for indication the "disable in" function can be set and transferred to work trough limit input terminal pin 9 or pin 10 (par.15). 11 Load compensation (RxI-comp) ensures good torque with low speeds. It is good to start testing with zero value, but if the motor seems weak when starting or slowing down to the rightposition this value can be increased carefully and step by step. Notice: Too high value is recognized from oscillation and/or twiching.12 Time out tripp will cut off the driving if continuous driving to the same direction exceeds the set value (statet in seconds).13 Usage counter reset parameter is for manual reset of counters. Choosing and saving value 1 will reset the hour and start counters.14 Home run direction and start condition setting or enabling the learn routine for finding the full movement range.Home run can allways be started with RES/LEARN input (pin 11). Auto home can be started with actual limit switch inputs or with so called SW-limits (par. 23 and 24). Last special option (value 7) is for starting the learn routine. That is an end to end drive routine to count and determine the real full movement range.15 In case the pin.13 is used for indication, the limit switch inputs pin 9 or 10 can be configured to work as disable input.16 Not in use in this program version.17 Dead zone is for determining the suitable positioning accuracy. If this positioning window value is small the positioning is tended to be done more accurately. If value is too small compared to the accuracy of the other parts of the application, the system might not be able to work properly. Notice. Other parameters like braking zone and FW/BW speed settings will also affect to the positioning behaviour.18 Braking zone value is determined as a percentage of the full movement range. It determines how early driver starts to slow down before reaching the right position. Main rule is that small value for slow applications and high value for fast applications.19 & 20 Start and stop ramps are used to smoothen the speed and direction changes. Its the time from 0-100% or from 100%-0 speed.21 & 22 are for determining the control signal range limits. Value can be given as Volts, 0 to 550 (0 to 5,5V), or the min. and max. values can be measured automatically by setting value to 551. Then the card will measure the signal in the POSITION SET input. Pls. read also the chapter "Control range setting".23 & 24 Inner (BW) and outer (FW) SW-limits. With these adjustable limits the movement range can be limited to suite the application. Notice: if either of these SW-limits is used for auto-home (par.14) the motor will drive over the limit when executing the home run.25 The full-range is determined by setting the known or calculated full range pulse edge count to be the parameter value. Alternatively the value can be defined by making the learn run (par.14 val.7) Notice. The learned pulse edge number is up dated to the EM-236 Interface unit display when you make a new Load & Edit data query or try to change the value right after learn routine. to change26 PWM frequeny selection 2khz offer more current and 16kHz gives quiet run.ABOUT PARAMETERS1.Feedback mode is a mandatory setting to be doneaccording to the application. 1= for one pulse line only,2= two pulse lines for 0° and 90° pulses.2.Limit and pulse inputs (pins 9, 10, 2 and 3) can be set to work with positive or negative logic. Signal can be either pulling up =PNP or down to 0V which is often marked as NPN signal.3 & 4 driving speed to FW (out) and BW (in) directions.5 The speed setting for "home run" and "learn" routines.6 &7 Current limit setting for FW (out) and BW (in) driving directions.8 Current tripp delay time 1-255ms, if set to 0 the tripp is disabled9 Combiport configuration (pin 13). This terminal can work as combined input-output. It can be fault output and disable input or an on position indicator giving an "on position" signal after a succesfull positioning. It can also be used to indicate the position with continuous voltage signal 0-5V (val.3) or 0,5-4,5V + 0V fault (val.4).Notice: With val. 3 or 4, also the DIP3 must be set to "ON" position.10 Over voltage limit. Motor is switched to free wheel if the selected voltage level is exceed. This saves the driver or other devices in supply line from over voltages in case the motor generates surplus energy during slow down or braking.This can happen eg. in vehicle or lifting applications. MONITORABLE VALUES ( Can be read with EM-236)1 fault code ( see above ) 1-62 motor current 0-20A / 0-2003 target position 0-100,0% (0-1000)4 realized position 0-100,0% (0-1000)5 position as pulse edges 0-655356 hour counter (max.65535h)7 start counter (max.65535)8 start counters over flow counter (max. 65535)FAULT LED -blinking codes 1.I-trip 1 blink 2.pulse lost 2 blink 3.over temperature 3 blink 4.over voltage 4 blink 5.time out trip 5 blink 6.learn corrupted 6 blink。
ISO9001工程变更ECN控制程序(含流程图)
工程变更(ECR/ECN)控制程序(ISO9001-2015)1.0目的为使工程变更能完全符合客户及生产单位之需求,且使各单位能在最短的时间内获得正确的变更信息,达到文件规范化管理,特拟定本程序。
2.0范围文件适用于公司有关生产变更、原材料变更、设计变更时的所有业务的控制管理。
3.0定义与术语a.ECR: Engineering Change Request工程变更申请(业务通知单、联络单、邮件等方式);b.ECN: Engineering Change Notification 工程变更通知单。
4.0职责a.相关单位﹕ECN的申请与确认, 并依研发部发布的ECN内容配合相关工作的实施与落实。
b.研发部﹕工程变更的审查、执行、验证、ECN核发及相关技术文件的修订。
c.管理部:对变更产品性能检验测试。
d.业务部:接收客户变更信息和向客户传递变更信息。
5.0作业流程5.1ECR提出a.集团业务或内销业务在接获客户质量改善要求时,或有必要降低成本时,由业务部门提出ECN。
b.采购单位遇零件交期、价格或其他因素须作工程变更时,由采购部门提出ECN。
c.品管在各项检验过程中发现质量有变异,并经制程能力分析确认后需工程变更时,或管控测量测试方式不便,确认可变更规格或方法的,由品管部门提出ECN。
d.生产单位于制造过程中,有作业性改善意见或统计分析确认后发现质量有变异时,得由生产部门提出ECN。
e.研发部在做各项实验验证、模拟分析、安全考虑、成本分析时,若判定需作工程变更时,由研发部提出ECN。
f.微小变更,如图面/BOM修正,标注更改,料号更改/修正,标签变更等,对产品性能,外观无影响,经研发部经理确认可以不需经ECN程序的,可由研发部直接下发ECN执行变更。
g.各部门作业时发现产品功能、制程条件、包装方式等不能满足需求时等,应先向所属单位经理反映此一状况;该部门经理应先判断、过滤后再书面向工程部门提出工程变更需求申请。
EM231-RTD4 热电阻 温度扩展模块说明书

GB EM231-RTD4热电阻温度扩展模块说明书EM231–TC(热电偶)和-RTD(热电阻)扩展模块产品选型模块名称及描述24V 供电功耗尺寸(mm)重量订货号EM231-TC4模拟量输入热电偶4输入需要 1.8W71.2×80×62210g6ES7231-7PD22-0XA8 EM231-RTD4模拟量输入热电阻4输入需要 1.8W71.2×80×62210g6ES7231-7PC22-0XA8EM231-RTD产品参数常规EM231-RTD4隔离现场到逻辑现场到24VDC 24VDC到逻辑500VAC 500VAC 500VAC共模输入范围(输入通道到输入通道)0共模抑制>120VdB@120VAC输入类型模块参考接地的RTD(2、3或4线连接)输入范围RTD类型(每个模块选择一种)铂(Pt)或电阻输入分辨率温度电阻0.1℃/0.1℉15位加阻性符号位模块更新时间:所有通道405ms导线长度到传感器最长为100mEM231-RTD4接线示意图提示:对于未使用的通道,可以在此通道上接一个电阻代替RTD。
EM231-RTD热电阻模块要求所有连接到该模块的RTD都必须是同一类型。
组态EM231-RTD4热电阻模块EM231-RTD4组态开关提示:要使DIP 开关起作用,需要重新给PLC 上电。
SW1SW2SW3SW4SW5RTD 类型测量范围读数范围00000PT100/3850PPM -200~600℃-2000~6000(0.1℃R.P.)00001PT200/3850PPM -200~600℃-2000~6000(0.1℃R.P.)00010PT500/3850PPM -200~600℃-2000~6000(0.1℃R.P.)00011PT1000/3850PPM-200~600℃-2000~6000(0.1℃R.P.)1010010K ΩF.S.0-10000Ω0-10000(3ΩR.P.)11111600ΩF.S.0-600Ω0-6000(0.2ΩR.P.)注① F.S.(full scale)满量程②R.P.(resolving power)分辨率②3850是一种温度系数,也是市面上最常用的一种。
AdvanTrol-Pro V2.65 软件SUPCON流程图制作

ESD HAZARD: Indicates information that Danger of an electro-static discharge to which equipment may be sensitive. Observe precautions for handling electrostatic sensitive devices
advantrolprov265????流程图制作使用手册????????浙江中控技术股份有限公司声明?严禁转载本手册的部分或全部内容
AdvanTrol-Pro V2.65
流程图制作使用手册
浙江中控技术股份有限。 在不经预告和联系的情况下,本手册的内容有可能发生变更,请谅解。 本手册所记载的内容,不排除有误记或遗漏的可能性。如对本手册内容有疑问,请与
3.9 管道 ........................................................................................................................................... 7 3.10 文字 ........................................................................................................................................... 9 3.11 时间对象 ............................................................................................................................... 10 3.12 日期对象 .............................................................................................................................. 10 3.13 模板窗口 ............................................................................................................................... 10 3.14 动态数据 ............................................................................................................................... 12 3.15 开关量 .................................................................................................................................. 14 3.16 命令按钮 .............................................................................................................................. 15 3.17 位图对象 ............................................................................................................................... 19
EM266(DT266) SERIES DIGITAL CLAMP METER 说明书

OWNERS MANUALRead this owners manual thoroughly before useEM266(DT266) SERIES DIGITAL CLAMP METERWARRANTYThis instrument is warranted to be free from defects in material and workmanship for a period of one year. Any instrument found defective within one year from the delivery date and returned to the factory with transportation charges prepaid, will be repaired, adjusted, or replaced at no charge to the original purchaser. This warranty does not cover expandable items such as battery.If the defect has been caused by a misuse or abnormal operating conditions, the repair will be billed at a nominal cost.SAFETY INFORMATIONThe digital multimeter has been designed according to IEC-61010 concerning electronic measuring instruments with a measurement category (CAT II ) and pollution degree 2.ELECTRICAL SYMBOLSAlternating CurrentDirect CurrentCaution, risk of danger, refer to the operating manualbefore use.Caution, risk of electric shock.Earth (ground) TerminalFuseConforms to European Union directivesThe equipment is protected throughout by doubleinsulation or reinforced insulation.A WARNINGTo avoid possible electric shock or personal injury, follow these guidelines:• Do not use the meter if it is damaged. Before you use the meter, inspect the case. Pay particular attention to the insulationsurrounding the connectors.• Inspect the test leads for damaged insulation or exposed metal.Check the test leads for continuity. Replace damaged test leads before you use the meter.• Do not use the meter if it operates abnormally. Protection may be impaired. When in doubt, have the meter serviced.• Do not operate the meter around explosive gas, vapor, or dust. • To avoid damages to the instrument, do not exceed the maximum limits of the input values shown on the meter.• Before use, verify the meter's operation by measuring a known voltage.• When servicing the meter, use only specified replacement parts. • Use with caution when working above 30V AC RMS, 42V peak, or 60V DC. Such voltages pose a shock hazard.• When using the probes, keep your fingers behind the finger guards on the probes.• Connect the common test lead before you connect the live test lead. When you disconnect test leads, disconnect the live test lead first.• Remove the test leads from the meter before you open the battery door.• Do not operate the meter with the battery door or portions of thecover removed or loosened.•To avoid false readings, which could lead to possible electric shock or personal injury, replace the batteries as soon as the low battery indicator (" ") appears.•When an input terminal is connected to dangerous live potential it is to be noted that this potential at all other terminals can occur! •After you press the Data Hold button to enter Data Hold mode, caution must be used because hazardous voltage may be present. •CATII-Measurement Category II is for measurements performed on circuits directly connected to low voltage installation.(Examples are measurements on household appliances, portable tools and similar equipments.) Do not use the meter formeasurements within Measurement Categories III and IV.CAUTIONTo avoid possible damage to the meter or to the equipment under test, follow these guidelines:•Disconnect circuit power and discharge all capacitors beforetesting resistance, insulation resistance, continuity or diode. •Use the proper terminals, function, and range for your easurements. •Never measure current while the test leads are inserted into the input jacks.•Before rotating the range switch to change functions, disconnect test leads from the circuit under test.•Remove test leads from the meter before opening the meter case.FRONT PANEL DESCRIPTION1. Transformer JawsPick up the AC current flowing through the conductor.2. "DATA HOLD" ButtonPress this button to hold the present reading on the display, press again to release the display.For model 260D, this button is used for holding peak.3. Functio n / Range Switc hFunction / Range switch for selecting measuremen t functio n and range.4. Displa y3 1/2 digits LCD, Max. reading 1999.5. Drop-proof Wrist Strap:Prevent the instrumen t from slipping off the hand while in use.6. "EXT" Jac kPlug-in connecto r for the banana plug "EXT" from the extensional insulation resistance tester unit.7. "COM" Jac kPlug-in connecto r for the black test lead while measuring voltage, resistanc e and continuity; and for connectin g the banana plug "COM" from the insulation tester unit while measuring insulation resistance.8. V/ΩInput Jac kPlug-i n connecto r for the red test lead while measuring voltage, resistanc e and continuity; and for connectin g the banana plug "V/Ω" from the insulation tester unit while measuring insulation resistance.9. Trigge rPress the level to open the transforme r jaws; when the finger pressing on the level is released, the jaws will close again.MODEL S AND FUNCTIONSACV ACA DCV ΩInsulationTEM PF200mV200V750V20A200A1000A200mV2V20V200V1000V200Ω2kΩ20kΩ200kΩ2MΩ20MΩ-2000MΩ°C, °F2kHz1mA, 2.8V<50Ω266********266C***************266C+****************260D*****************266F*****************266F T***************INTRODUCTIONThe meter is a portable, 3-1/2 digits LCD clamp meter with insulation test function (with optional 500V insulation tester unit), designed for being used by electricians, technicians, serviceman and hobbyists who need an instrument that is accurate, reliable, and always ready for use. It is powered by a standard 9V battery, and can provide150-200 operating hours, which depends on the type of battery and using conditions. It has rugged structure design, good feeling held in operator's hand and convenient use.TECHNICAL SPECIFICATIONSThe following specifications assume a l-year calibration cycle and operating conditions of temperature scale of 18°C to 28°C (64°F to 82°F) with relative humidity up to 80% unless otherwise noted. Accuracy specifications take the form of:± [(% of Reading)+(Number of Least Significant Digits)]Range 20A 200A1000A Resolution10mA100mA1AAccuracy(50Hz - 60Hz)+ (2.5% + 8)+ (2.5% + 5)+ (2.5% + 5) for 800A and belowIf >800A, the reading is only for reference.AC CurrentFrequency response: 50~60HzIndication: Average (rms of sine wave) Overload protection: 1200A within 60seconds, Jaw opening: 2"(5cm)Frequency range: 45 - 400Hz I nput impedance: 9MΩ Indication: Average (rms of sine wave) Overload protection: 200mV range: 250V AC;the other ranges: 750V rms ACOverload protection: 200mV range: 250V AC;the other ranges: 1000V DC/AC peak. Input impedance: 9MΩInsulation Test (with optional 500V insulation tester unit)AC VoltageDC VoltageRange 20MΩ 2000MΩResolution 10kΩ 1MΩAccuracy +(2% + 2 )500MΩ: +(4% + 2) >500MΩ: +(5%+ 2)Range 200mV 200V 750VResolution 0.1mV 100mV 1VAccuracy +(1.2% + 5) +(2.0% + 5)Range 200mV 2V 20V 200V 1000V| Resolution0.1mV 1mV 10mV 100mV1VAccuracy+(0.8% + 3) +(1.2%+ 5)ResistanceUse K type thermocoupleNote:1. Accuracy does not include error of the thermocouple probe.2. Accuracy specification assumes ambient temperature is stableto ±1°C. For ambient temperature changes of ±5ic, ratedaccuracy applies after 1 hour.Range 2 kHz Resolution1HzAccuracy+(1.5%+ 5)Range 200Ω 2kΩ 20 kΩ 200 kΩ 2MΩ Resolution0.1Ω1Ω10Ω100Ω1kΩAccuracy+(1.2% + 5)+(1.0% +3)+(1.5%+ 5)Range 0°C - 750°C 32°F~1382°F Resolution1°C1°FAccuracy0^-400^: ±(1%+5)400r~750lC: ±(2%+5)32T-752T: ±(1%+9)752T-1382T: ±(2%+9)TemperatureOverload protection: 250V rms ACDiode and Continuity TestGENERAL SPECIFICATIONSDisplay: 3 1/2-digit LCD, with a max. reading of 1999Overrange Indication: only figure" 1 " displayed on the LCD Negative Polarity Indication: " - " displayed automatically Sampling Rate: about 2-3 times/secOperating Temperature: 0°C~40°C, <75%RHStorage Temperature: -10°C~50°C, <85%RHBattery: 9V, 6F22 or equivalentLow Battery Indication: " " shown on the displayDimensions: 240 X 102 X 47mmWeight: about 300g (including battery) 10Range DescriptionThe approx. forward voltage drop of the diode wil Ibe displayed on the LCD.When the resistance is less than about 50Ω, the built-inbuzzerwill sound.OPERATING INSTRUCTIO NAC Curren t Measuremen t1. Make sure the "Data Hold" switch is not pressed.2. Set the Function/Rang e switch to the desired ACA range.3. Press the trigge r to open the transforme r jaws and clamp oneconducto r only. It is impossible to make measurement s when two or three conductor s are clamped at the same time.4. The value displayed on the LCD is the AC current flowing throug hthe conductor.Insulatio n Resistanc e Test1. Set the rotary switch of the clamp meter to the 2000MΩrange.In this condition, it is normal that the reading is unstable.2. Insert the three banana plugs V/Q, COM, EX T of the insulationtester unit to the correspondin g V/Q, COM, EX T input jacks on the clamp meter.3. Set the range switch of the insulation tester unit to the 2000MΩposition.4. Connect the test leads from the insulation tester unit to theapplianc e to be tested.5. Set the insulation tester Power switch to the "ON" position.6. Push the " 500V" button, the red LE D "500V" will light. Thereading on the LCD of the clamp meter is the insulation resistance value; if the reading is below 19MΩ, set the rotary switch of the the clamp meter and the range switch of the insulation tester unit to 20MΩ range position to increase the measuremen t accuracy.117. If the insulation tester unit is not used, the power switch mustset to OFF position. And the test leads must be removed from the input jacks; this can extend the battery life and prevent electrical shock hazard.DC Voltage Measurement1. Connect the red test lead to the "V/Ω" jack and the black testlead to the "COM" jack.2. Set the rotary switch to the desired DCV range. If the voltage tobe measured is not known beforehand, set the range switch to the highest range and then turn down range by range untilsatisfactory resolution is obtained.3. Connect the test leads to the source or load to be measured.4. Read the voltage value displayed on the LCD along with thepolarity of the red test lead.AC Voltage Measurement1. Connect the red test lead to the "V/Ω" jack and the black testlead to the "COM" jack.2. Set the rotary switch to the desired ACV range. If the voltage tobe measured is not known beforehand, set the range switch to the highest range and then turn down range by range untilsatisfactory resolution is obtained.3. Connect the test leads to the source or load to be measured.4. Read the voltage value displayed on the LCD.12Resistanc e Measuremen t1. Connect the red test lead to the "V/Ω" jack and the black testlead to the "COM" jack.2. Set the rotary switch to the desired Ω. range.3.Connect the test leads to the resisto r to be measured andread the value displayed on the LCD.Note:For resistance about 1 Mfi and above, the meter may take a few second s to stabilize. This is normal for high resistance readings.Diode Test1. Connect the red test lead to the "V/Ω" jack and the black testlead to the "COM" jack. (The polarity of the red test lead ispositive"+".)2. Set the rotary switch to range.3. Connect the red test lead to the anode of the diode to be testedand the black test lead to the cathode of the diode. The approximat e forwar d voltage drop of the diode will be displayed on the LCD.If the connectio n is reversed, only figure "1" will be shown.13Audible Continuity Test1. Connect the red test lead to the "V/Ω" jack and the black testlead to the "COM" jack.2. Set the rotary switch to range.3. Connect the test leads to the two terminals of the circuit to betested. If the resistance Is less than about 50Ω, the built-in buzzer will sound.Temperature MeasurementNoteTo avoid possible damage to the meter or otherequipment, remember that while the meter is ratedfor 0°C to +750°C and 32°F to 1382°F, the K TypeThermocouple provided with the meter is rated to250°C. For temperatures out of that range, use ahigher rated thermocouple.The K Type Thermocouple provided with the meteris a present, it is not professional and can only beused for non-critical reference measurements.For accurate measurements, use a professionalthermocouple.1. Connect the K type thermocouple to the correspondingmeasurement socket.2. Set the rotary switch to the desired temperature range.3. Touch the K type thermocouple to the object to be measured.4. Wait a while, read the temperature value displayed on the LCD.14Frequenc y Measuremen t1. Connect the red test lead to the "V/Ω" jack and the black testlead to the "COM" jack.2. Set the rotary switch to the frequenc y (2kHz) range.Connect the test leads to the source or load to be measured. 3. Read the frequenc y value displayed on the LCD.MAINTENANC E•Before opening the case, always disconnec t the test leads from all live circuits.•Periodically wipe the case with a damp cloth and mild detergent.Do not use abrasives or solvents.BATTERY REPLACEMEN TWhen the symbol" " appears on the display, it shows that the batter y should be replaced. To replace the battery, open the batter y door, replace the exhausted battery with a new one of the same type, reinstall the battery door. Some models of this series use screws for fastening the door, please install the screws.15ACCESSORIESInstruction manual: 1 copyTest leads: 1 pairNote:In normal condition, the insulation tester is not provided. If needed, you can buy from our company.PRESENTK Type Thermocouple: 1 piece (only 266C, 266C+, 266FT) NOTE1. This manual is subject to change without notice.2. Our company will not take the other responsibilities for any loss.3. The content of this manual can not be used as the reason to use the meter for any special applications.DISPOSAL OF THIS ARTICLEDear Customer, If you at some point intend to dispose of this article, then please keep in mind that many of its components consist of valuable materials, which can be recycled. Please do not discharge it in the garbage bin, but check with your local council for recycling facilities in your area.16 。
3.大功率激电测深工作方法要点
江西省地质矿产勘查开发局物化探大队物探八院工作方法(三)激电中梯、激电测深(中梯、对称四极装置)江西省地质矿产勘查开发局物化探大队物探八院目录第一章基本原理 (7)第一节直流激发极化法勘探原理及应用条件 (8)一、直流激发极化法的基本原理 (8)二、(视)电阻率和(视)激化率的概念 (10)(一)视电阻率(ρs) (10)(二)岩(矿)石的导电性特征 (11)(三)视激化率(ηs) (12)三、影响(视)电阻率、(视)极化率数值大小的主要因素 (13)(一)影响视电阻率(ρs)的主要因素 (13)(二)影响视激化率(ηs)的主要因素 (14)第二节直流激电工作装置示意图 (15)一、直流激电工作装置概述 (15)二、激电测深装置 (16)三、激电中间梯度装置(A—MN—B) (17)第二章仪器设备 (19)第一节仪器设计基本原理 (19)一、发送机 (20)二、接收机 (21)第三节主要技术指标 (21)一、仪器的基本要求 (21)二、技术规程对仪器的要求 (22)(一)仪器的技术指标 (22)(二)导线与线架的技术指标 (22)(三)电极的技术指标 (22)三、大功率激电测量系统 (23)(一)DJF10-1A发送机 (23)(二)DJS-8接收机 (24)第四节仪器的维护与保养 (26)一、大功率激电测量系统接收机 (26)(一)仪器故障检查诊断 (26)(二)仪器保养 (27)二、发送机可能产生的故障及简单维修 (27)第三章工作技术规范规程要点 (28)第一节常用的规范、规程 (28)一、电法类 (28)二、测量类 (28)第二节装置要求 (29)一、激电测深 (29)二、激电中梯 (30)第三节采集信号要求 (32)一、激电测深 (33)二、激电中梯 (35)第四节精度要求 (36)第四章野外工作流程 (39)第一节工作流程图 (39)第二节生产准备阶段 (40)一、设备及人员配置 (40)二、设备及人员安排 (40)三、技术储备 (41)第三节仪器检测和技术试验 (42)一、仪器性能检查 (42)二、技术方法试验 (43)(一)激电测深 (44)(二)激电中梯 (44)第四节测网布设及测地工作 (44)一、激电测深 (44)二、激电中梯 (45)第五节装置类型 (47)一、激电测深装置 (47)二、中间梯度装置 (47)第六节仪器参数和测量要求 (48)一、仪器参数设置 (48)二、测量要求 (48)第七节原始数据采集 (50)第八节资料预处理及基本图件制作 (51)一、资料预处理 (51)二、基本图件制作 (53)(一)应提交的图件 (53)(二)成果图件的技术说明 (53)(三)几种主要成果图件的具体要求 (53)第五章质量检查 (56)第一节观测精度检查 (56)第二节异常检查 (58)一、观测误差造成的假异常 (58)二、客观存在的异常 (59)(一)地质观察研究 (59)(二)综合剖面 (59)(三)物性测定 (60)第六章资料整理与工作总结报告编写 (61)第一节资料整理 (61)第二节工作总结报告编写 (61)一、名称 (61)二、编写内容 (61)第三节资料验收清单 (63)第一章基本原理电法勘探是地球物理勘探的主要方法之一,它是以地下岩(矿)石的电性或电磁性质差异为基础的,利用直流或交流电(磁)场来研究地质结构和寻找有用矿产的一种物理勘探方法,简称电法。
中国电信在线计费系统(OCS)技术要求V0.8
中国电信企业标准版本号:V0.8中国电信股份有限公司2005-5前言中国电信移动业务在线计费设备技术要求是在充分研究和分析国内外在线计费系统基础上,基于中国电信移动业务在线计费的需求,参考3GPP、IETF等国际标准组织的在线计费系统规范编制的。
本方案是中国电信移动业务在线计费设备技术要求,为中国电信移动业务在线计费系统总体技术方案的组成部分,是在线计费设备技术要求的指导性文件,整个在线计费系统技术方案主要包括:《中国电信在线计费系统(OCS)总体技术方案》《中国电信在线计费系统(OCS)业务需求》《中国电信在线计费系统(OCS)技术要求》《中国电信在线计费系统OCP接口规范》《中国电信在线计费系统SCP设备改造要求》《中国电信在线计费系统ISMP设备改造要求》《中国电信在线计费系统CCG设备技术要求》本技术方案由中国电信股份有限公司业务支撑中心提出并归口。
本方案起草单位:本方案主要起草人:本方案解释单位:目录1适用范围 (12)2引用标准 (13)3术语和缩略语 (14)3.1术语 (14)3.2缩略语 (15)4系统体系结构 (17)4.1OCS网络位置 (17)4.2OCS系统结构 (18)4.2.1功能模块 (18)4.2.2接口 (19)5业务功能要求 (21)5.1通用接口层(Common Interface Function) (21)5.1.1请求消息格式转化 (21)5.1.2话单文件的预处理 (22)5.1.3用户基本资料加载 (23)5.1.4提供路由分发机制 (23)5.1.5应答消息格式转化 (24)5.1.6异常管理 (24)5.2计费控制(Charging Function) (24)5.2.1计费控制流程 (25)5.2.1.1基于会话的初始计费控制流程 (25)5.2.1.2基于会话的更新计费控制流程 (27)5.2.1.3基于会话的中止计费控制流程 (28)5.2.1.4基于事件的计费控制流程 (30)5.2.2会话管理 (31)5.2.2.2关闭会话 (32)5.2.2.3会话状态监控管理 (32)5.2.2.4重发鉴权请求检查 (32)5.2.3计费管理 (33)5.2.3.1业务识别和计费策略加载 (33)5.2.3.2帐户控制 (33)5.2.3.3批价控制 (33)(1) 批价得到服务的资费、费用或使用量 (33)(2) 余额临界值的判断和处理 (33)(3) 费率切换点的判断和处理 (34)(4) CCA相关参数的设置 (35)5.2.3.4计费信息的更新处理 (35)5.2.3.5多业务并发处理 (36)5.2.3.6计费话单生成 (36)5.2.4AoC功能 (36)5.2.5异常处理 (37)5.3批价处理(Rating Function) (37)5.3.1费用计算能力 (37)5.3.1.1支持事件格式动态识别 (37)5.3.1.2支持多种计费对象 (37)5.3.1.3支持多种计费元素 (38)5.3.1.4支持条件灵活判别 (38)5.3.1.5支持灵活的费用计算 (39)5.3.2费用计算方式 (39)5.3.2.1正算 (39)5.3.2.1.1预申请额度的计算 (39)5.3.2.1.2最终额度的计算 (40)5.3.2.2反算 (40)5.3.3异常处理 (40)5.4.1预留功能 (40)5.4.2返还功能 (41)5.4.3扣费功能 (41)5.4.4补款功能 (41)5.4.5充值功能 (42)5.4.5.1周期性充值 (42)5.4.5.2累积充值 (42)5.4.5.3按帐目充值 (42)5.4.5.4充值帐目限制消费 (42)5.4.5.5余额帐本余额转移 (43)5.4.6外部余额使用 (43)5.4.7实时余额查询 (43)5.4.8帐户余额监控 (43)5.4.8.1触发条件和动作的定义 (43)5.4.8.2帐户余额监控动作触发 (44)5.4.8.3记录操作日志 (44)5.5计费网关(Charging Gateway Function) (44)5.5.1支持定时话单文件生成 (45)5.5.2支持定量话单文件生成 (45)5.5.3支持定时和定量结合的话单文件生成 (45)6外部接口要求 (46)6.1计费消息输入接口 (47)6.1.1接口概述 (47)6.1.2接口要求 (47)6.2计费话单输入接口 (47)6.2.1接口概述 (47)6.2.2接口要求 (47)6.3与SID的同步接口 (48)6.3.1接口概述 (48)6.3.2.1同步数据 (49)客户数据 (49)产品数据 (49)定价数据 (49)计费参数数据 (50)6.3.2.2同步要求 (50)6.3.2.3同步方式 (51)6.4外部帐户接口 (55)6.4.1接口概述 (55)6.4.2接口要求 (55)6.5实时查询接口 (55)6.5.1接口概述 (55)6.5.2接口要求: (56)6.6话单输出接口 (56)6.6.1接口概述 (56)6.6.2接口要求 (56)6.7通知接口 (56)6.7.1接口概述 (56)6.7.2接口要求 (56)6.8运行维护接口 (57)6.8.1接口概述 (57)6.8.2接口要求 (57)7系统管理要求 (59)7.1运行管理 (59)7.1.1性能管理 (59)7.1.2故障管理 (59)7.1.3配置管理 (61)7.1.4系统运行监控 (61)7.1.5集中检测 (61)7.1.7集中控制 (63)7.1.8数据库运行监控 (63)7.2业务统计 (63)7.2.1业务量统计 (63)7.2.2消息处理时间统计 (63)7.2.3消息处理结果统计 (64)7.3审核校验 (64)7.3.1提供系统处理分析报告 (64)7.3.2提供稽查功能 (64)7.4数据管理 (64)7.4.1SID数据同步 (64)7.4.2OCS产品配置数据管理 (64)7.4.2.1产品维护 (65)7.4.2.2产品定价数据管理 (65)7.4.3OCS参数数据管理 (66)7.5日志管理 (66)7.5.1统一的分级日志记录机制 (66)7.5.2日志维护功能 (66)7.5.3日志统计查询功能 (66)7.6版本管理 (67)8性能要求 (68)8.1实时性要求 (68)8.2可靠性要求 (68)8.3可扩展性要求 (68)8.4平滑升级要求 (69)8.5拥塞处理要求 (69)8.6容灾备份要求 (69)9基础平台要求 (71)9.1主机要求 (71)9.1.2硬件冗余 (72)9.1.3软件冗余 (72)9.1.4硬件热插拔 (72)9.1.5软件热插拔 (72)9.1.6过负荷控制 (72)9.2网络要求 (73)9.2.1负荷分担 (73)9.2.2网络分段 (73)9.2.3网络冗余 (74)9.3数据库要求 (75)9.3.1并行数据库 (75)9.3.2数据库备份 (76)9.4存储系统要求 (76)9.5操作系统要求 (76)9.6系统备份要求 (77)9.6.1备份恢复方案 (77)9.6.2备份恢复方案构架 (77)9.7容灾要求 (78)9.7.1容灾功能 (78)9.7.2容灾方案构架 (78)9.7.3容灾方案流程 (79)10系统安全要求 (81)10.1安全机制总体原则 (81)10.2基础设施安全机制 (81)10.3操作系统防护机制 (82)10.4用户管理安全机制 (82)10.5会话管理安全机制 (83)10.6远程维护安全机制 (84)10.7日志机制 (85)10.8.1密码设置规则 (85)10.8.2密码更改规则 (86)10.8.3强制密码更改配置 (86)10.8.4密码有效时间和历史记录 (86)10.8.5登录失败锁定规则 (87)10.9数据备份恢复机制 (87)10.9.1备份策略 (87)10.9.2数据备份 (87)10.9.3数据恢复 (88)图表图1:OCS网络组织示意图 (17)图2:OCS系统结构 (18)图3:基于会话的初始计费控制流程 (25)图4:基于会话的更新计费控制流程 (27)图5:基于会话的中止计费控制流程 (28)图6:基于事件的计费控制流程 (30)图7:计费网关流程 (45)图8:OCS系统外部接口 (46)图9:负荷分担 (73)图10:网络分段 (74)图11:网络冗余 (75)图12:备份恢复方案构架 (78)图13:容灾方案构架 (79)图14:容灾方案流程 (80)图15:用户管理安全机制 (83)中国电信在线计费系统(OCS)技术要求1适用范围本要求为中国电信在线计费系统的技术要求,规定了中国电信在线计费系统的相关内容,包括:系统体系架构、业务功能要求、外部接口要求、业务流程、系统功能要求、性能要求、基础平台要求和系统安全要求等方面。
NuMaker-emWin-RDK-N9H30 用户手册说明书
ARM® ARM926EL-S Based32-bit MicroprocessorNuMaker-emWin-RDK-N9H30User ManualNUMAKER-EMWIN-RDK-N9H30 USER MANUALThe information described in this document is the exclusive intellectual property ofNuvoton Technology Corporation and shall not be reproduced without permission from Nuvoton.Nuvoton is providing this document only for reference purposes of NuMicro microprocessor based systemdesign. Nuvoton assumes no responsibility for errors or omissions.All data and specifications are subject to change without notice.For additional information or questions, please contact: Nuvoton Technology Corporation.Table of Contents1Overview (3)2Board Feature List (4)3Function Description (5)System Block Diagram (5)System Power Scheme (6)I/O or Jumper Description (6)3.3.1Power-on Setting (6)3.3.2SD Connector (7)3.3.3UART Interfaces (7)3.3.4USB Port (8)3.3.5RS485 Interface (9)3.3.6CAN Interface (9)3.3.7Ethernet Port (9)3.3.8JTAG Port (10)4NuMaker-emWin-RDK-N9H30 Demo Board Schematic (11)Main Block (11)Flash Memory (12)NUMAKER-EMWIN-RDK-N9H30 USER MANUALLCD Interface (13)N9H30F61I (14)Power (15)UART (16)USB (17)ETH_PHY&CAN (18)5Revision History (19)1 OverviewThe NuMaker-emWin-RDK-N9H30 demo board is N9H30 series product. Users can use theboard to develop and verify the emWin application program easily.The N9H30 series embedded the ARM®926 core for HMI applications which need highcomputing power and rich communication interfaces. The CPU can run up to 300 MHz andequipped with USB2.0 high speed device, USB2.0 high speed host, Ethernet interfaces and otherrich peripherals, such as LCD, NAND, SD, ADC, UART, SPI, I²C, I²S, CAN, RTC…etc.NUMAKER-EMWIN-RDK-N9H30 USER MANUALFigure 1-1 NuMaker-emWin-RDK-N9H30 Demo Board2 Board Feature List1. Adopted Nuvoton ARM926EJS-based MPU N9H30F61I, it can run up to 300MHz.2. NAND Flash used Winbond W29N01GV 128MB with 8-bit data bus width.3. SPI Flash used W25Q128FVSG 16MB.4. Boot selection by NAND or SPI or USB.5. One DB9 RS232 port with N9H30 UART0 for debugging.6. One DB9 RS232 port with N9H30 UART2 for user application.7. Installed SN65HVD230 transceiver for CAN bus communication.8. Installed MAX3485 transceiver for RS485 device connection.9. USB supports both HS USB2.0 device with micro USB connector and HS USB 2.0 host withtype-A connector.10. Provided one Micro-SD/TF card slot for data storage with SD memory card.11. Used 7” TFT LCD and embedded that resistive type touch panel.12. Reserved an external coin-cell socket for RTC power backup with CR2032 battery.13. Provided one10/100Mb Ethernet RJ45 port.14. Provided one buzzer device for user application.15. JTAG interface is reserved for software development advanced.16. System powered could be supplied by DC-5V adaptor or USB VBUS. NUMAKER-EMWIN-RDK-N9H30 USER MANUAL3 Function DescriptionSystem Block DiagramNUMAKER-EMWIN-RDK-N9H30 USER MANUALSystem Power Scheme NUMAKER-EMWIN-RDK-N9H30 USER MANUALI/O or Jumper Description3.3.1 Power-on SettingSW1 Function Description:NuMaker-emWin-RDK-N9H30 provided system program code booting source from NAND Flash,SPI-NOR Flash or USB. In the board we have programmed a sample emWin code to NANDflash for demonstration.About USB booting purpose is for Flash memory programming through the NuWriter of PC utilitytool, regarding the NuWriter operation please refer the user manual to get for detail.NUMAKER-EMWIN-RDK-N9H30 USER MANUALSW1-1 SW1-2Boot FromON ON booting from USB for PC communicationON OFF booting from NAND Flash OFF OFFbooting from SPI Flash3.3.2 SD ConnectorJP7: NuMaker-emWin-RDK-N9H30 provided a micro SD connector for user use what program accesses or data storage.Note. N9H30 cannot support system booting.3.3.3 UART Interfaces●CON5: One DB-9 connector for RS232 communication, the UART signals are from N9H30UART0 TXD and RXD interfaces and through the RS232 transceiver, SP3232EEN. This port isdedicated for message debugging.●CON4: One DB-9 connector for RS232 communication, the UART signals are from N9H30UART2 TXD and RXD interfaces and through the RS232 transceiver, SP3232EEN. This port isreserved for user application.3.3.4 USB Port NUMAKER-EMWIN-RDK-N9H30 USER MANUAL●CON1: This is a Micro USB connector, it is for PC communication and the signals are fromN9H30 USB port-0●CON2: This is a Type-A USB HOST connector, it is for USB devices connection and the signalsare from N9H30 USB port-1Note. CON1 VBUS can power supplied for system if connected with PC or notebook.3.3.5 RS485 Interface●J5: NuMaker-emWin-RDK-N9H30 provided a two-pin terminal connector with 3.5mm pitch forRS485 device connection.Note. MAX3485 is RS485 (half-duplex communication) transceivers and built in to NuMaker-emWin-RDK-N9H30 demo board already.3.3.6 CAN InterfaceNUMAKER-EMWIN-RDK-N9H30 USER MANUAL●CON7: NuMaker-emWin-RDK-N9H30 provided a two-pin terminal connector with3.5mm pitch forCAN bus device communication with N9H30 CAN0 port.Note. CAN transceivers,SN65HVD230 have built in to NuMaker-emWin-RDK-N9H30 demoboard already.3.3.7 Ethernet Port●CON6: NuMaker-emWin-RDK-N9H30 provided a standard RJ-45 port for 10M/100M Ethernetcommunication.Note. NuMaker-emWin-RDK-N9H30 has built in the RMII-PHY, IC+ IP101GR on board already.3.3.8 JTAG PortJ2: NuMaker-emWin-RDK-N9H30 demo board provided one male header x6 connector with pitch NUMAKER-EMWIN-RDK-N9H30 USER MANUAL2.54mm for N9H30 JTAG signals; user can make that wiring connection with Keil- ICE forsoftware development advanced.NUMAKER-EMWIN-RDK-N9H30 USER MANUAL4 NuMaker-emWin-RDK-N9H30 Demo Board SchematicMain BlockLCDLCD DGND VDD33LVSYNC LHSYNC LCD_B[7:0]LCD_G[7:0]LCD_R[7:0]LCD_CLK Y+X-Y-X+PWM VDD5V N9H30F61IN9H30F61I485_TXEN 485_TXD 485_RXD UART0_TX UART0_RX 232TXD 232RXDPH0USB0_DM USB0_DP DP1DN1RTC_XO RTC_XI nRESET 12M_XO 12M_XI VDD18VDD12VDD33DGNDLVSYNC LHSYNC LCD_B[7:0]LCD_G[7:0]LCD_R[7:0]LCD_CLKSM_D[7:0]SM_RBn SM_REn SM_CS0n SM_CLE SM_ALE SM_WEn SM_WPn SPICS SPICLK SPIWp/D2SPIDo/D0SPIDi/D1SPIHOLD/D3RTCVD Y+Y-X+X-PWM SDCd SDCmd SDD[3:0]SDCLK PHY_MDIO PHY_MDC PHY_TXEN PHY_TXD0PHY_TXD1PHY_RXD0PHY_RXD1PHY_CRSDV PHY_RXERR MAC_REFCLKCAN_TX0CAN_RX0PHY_RSTPHY_RSTFLASHFlashSM_D[7:0]SM_RBn SM_REn SM_CS0n SM_CLE SM_ALE SM_WEn SM_WPnVDD33DGNDSPICS SPICLK SPIWp/D2SPIDo/D0SPIDi/D1SPIHOLD/D3SDD[3:0]SDCmd SDCd SDCLK UARTUART485_RXD 485_TXD 485_TXEN VDD33232RXD232TXD DGND UART0_RXUART0_TX FGND VDD5VVDD5VIN USBUSB USB0_DM USB0_DPPH0VDD5VIN FGNDDN1DP1POWERPowerVDD5VVDD33VDD12VDD18RTC_XO RTC_XI 12M_XI 12M_XO nRESETDGNDRTCVD PWM 485_TXEN 485_TXD 485_RXD UART0_TX UART0_RX 232TXD TitleSize Document Number Rev Date:SheetofMAIN_BLOCK1.0N9H30F51I_HMI_DEMOB18Tuesday , Nov ember 27, 2018232RXDPH0USB0_DM USB0_DP DP1DN1RTC_XO RTC_XI nRESET 12M_XO 12M_XI VDD18VDD12VDD33VDD33DGNDDGNDVDD5VIN FGND VDD5VFGNDVDD5VIN VDD5VLVSYNC LHSYNC LCD_B[7:0]VDD5VLCD_G[7:0]LCD_R[7:0]LCD_CLK DGND VDD33SDCd SM_D[7:0]SDCmd SM_RBn SM_REn SDD[3:0]SM_CS0n SM_CLE SM_ALE SM_WEn SM_WPn SDCLK ETH_PHY&CANETH_PHY&CANPHY_RXD0PHY_RXD1PHY_CRSDV PHY_MDIO PHY_MDC PHY_RXERRMAC_REFCLK PHY_TXEN PHY_TXD0PHY_TXD1VDD33DGNDCAN_TX0CAN_RX0FGND PHY_RSTPHY_MDIO SPICS PHY_MDC SPICLK PHY_TXEN SPIWp/D2SPIDo/D0SPIDi/D1PHY_TXD1PHY_TXD0PHY_RXD1PHY_RXD0PHY_CRSDV PHY_RXERR MAC_REFCLK CAN_TX0CAN_RX0SPIHOLD/D3DGNDVDD33RTCVD Y+VDD33DGND FGNDY-X+X-NUMAKER-EMWIN-RDK-N9H30 USER MANUALFlash MemoryNAND FLASHVDD33VDD33SM_D[7:0]VDD33SM_D[7:0]U1W29N01GVNC 1NC 2NC 3NC 4NC 5NC 6R/B 7RE 8CE 9NC 10NC 11Vcc 12Vss 13NC 14NC 15CLE 16ALE 17WE 18WP 19NC 20NC 21NC 22NC 48NC 47NC 46NC 45I/O744I/O643I/O542I/O441NC 40NC 39NC 38Vcc 37Vss 36NC 35NC 34NC 33I/O332I/O231I/O130I/O029NC 28NC 27NC 23NC 24NC 26NC25DGND R110KSM_D7SM_RBn SM_D6SM_REn SM _RBn SM_CS0nSM_REn SM_D5SM_CS0nSM_D4SM_CLE SM_ALE VDD33SM_WEn SM_ALE SM_CLE VDD33SM_WPnSM_WEn SM_D3R1410K SM_WPnSM_D2SM_D1R310K/N O PSM_D0VDD33VDD33C B10.1uFDGNDTitleSize Document Number Rev Date:SheetofFlash1.0N9H30F51I_HMI_DEMOA 38Tuesday , Nov ember 27, 2018SPICS SPICLK SPIWp/D2SPIDo/D0SPIDi/D1SPIHOLD/D3C210UF/25V C0805U2SRV05-4SOT23-6CH46CH23CH34Vn 2Vp 5CH11U3SRV05-4SOT23-6CH46CH23CH34Vn 2Vp 5CH11R2SDVD33VDD33DAT3C11UFC0603VDD33DGNDCB20.1uFSDD[3:0]SPI FalshR1810K JP7B8502A-13SB-HPA (T-Flash Card)DAT21DAT32CMD 3VDD 4CLK 5VSS 6DAT07DAT18CD9GND10GND 11GND 12GND 13R1910KSDD[3:0]R2010KR647SDD2R747DGND SDCmdSDD3DAT2R847U5W25Q128/CS 1Do/D12Wp/D23GND 4Di/D05CLK 6Hld/D37VCC 8SDVD33SDCmdSPICS CMD SPIHOLD/D3SPIDi/D1R1047SPIWp/D2SDCLKSPIDo/D0SPICLK CLK SDVSS R1347C3NC SDD0R1547DAT0L1600次@100M H ZL0603SDCdSDD1R1647DAT1SDVSSCDSDCdVDD33VDD33R1710KR510K DGNDVDD33R910KVDD33R410K R110DGND TF CARDVDD33R1210K SDCLKSDVD33DAT2CLKSDVSSDAT3CMDCDSDVD33DAT1SDVSS DAT0LCD InterfaceNUMAKER-EMWIN-RDK-N9H30 USER MANUALN9H30F61IU8N9H30F61I00000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000000NUMAKER-EMWIN-RDK-N9H30 USER MANUALPowerTitleSize Document Number Rev Date:SheetofPower1.0N9H30F51I_HMI_DEMO A 68Tuesday , Nov ember 27, 2018VDD5VL10 4.7uHVDD33U9ZT7103TTSOT-25EN1GND 2SW 3Vin 4FB5C32470pFCB220.1uFDGND R50680KDGNDDGND R52150K32768H z C r y s t a l12M H z C r y s t a lDGNDDGNDVDD5VX1TXC-9H T9 SMD 32.768KHz 30ppmR5310KRTC_XI RTC_XOC3815pFC3915pFVDD5VL12 4.7uHU11ZT7103TTSOT-25EN1GND 2SW 3Vin 4FB5DGNDDGNDC361nFDGND R54120KC40NC DGNDR55120KDGND R561MDGND12M_XI12M_XO DGNDX212MHz CRYSXIN1GND 2GND 4XOUT 3VDD5VC4215pFR5710KC4515pFDGND VDD5VDGNDL13 4.7uHDGNDU12ZT7103TTSOT-25EN1GND 2SW 3Vin 4FB5DGNDC441nFC46NCDGND R58200KDGNDR59100KDGNDDGNDDGNDC3510UF/25V C0805C4110UF/25V C0805C4710UF/25V C0805C3710UF/25V C0805C4310UF/25V C0805VDD12JP8SIP/2P SW_PB2_B1_SMD12VDD18C3410UF/25V C0805VDD5VVDD33DGNDVDD12VDD18L18600次@100MHZL0603RTC_XIRTC_XO12M_XI12M_XOU10TLV809GND1/RESET 2VDD3R E S E TC 330.1uFVDD33R51R490DGNDL11600次@100MHZL0603nRESETnRESETDGNDRTCVDD12RB521S-3012VDD33D13RB521S-3012BT1CR2032BAT\CR2032-4-2\smdCB230.1uF DGNDDGNDRTCVDD9SMAJ5.0CAD10SMAJ5.0CAD11SMAJ5.0CALED1GREEN LED 12R601KVDD33DGNDNUMAKER-EMWIN-RDK-N9H30 USER MANUALUARTRS485RS232000000000000RS23200000NUMAKER-EMWIN-RDK-N9H30 USER MANUALUSBU S B 0 D e v i c eR6920K USB0_DMR704.7USB0_DPR714.7PH0UDO1UDO0PH0FGNDR7239KFGNDFGNDVDD5VINTitleSize Document Number Rev Date:SheetofUSB1.0N9H30F51I_HMI_DEMOA 88Tuesday , Nov ember 27, 2018D1-D1+FGNDFGNDVDD5VINVDD5VIN CON1USB MICRO-AB RECEP.MICRO_USB_AB_LSVBUS 1D-2D+3GND5ID 4Shield 6Shield 7Shield 8Shield9C 751uFL15600次@100MHZL0603D161N4148VBUSVDD5VINUSB HostL16600次@100M H Z 12CON2USB TYPE-A B4P_ATYPEVBUS 1D-2D+3GND4Shield 5Shield6VBUS1DN1R73 4.7DN1C 570.1uFDP1R74 4.7DP1L17600次@100M H Z12FGND FGNDC5610UF/25V C0805L14600次@100M H Z 12U16SRV05-4SOT23-6C H 46C H 23C H 34V n 2V p 5C H 11U17SRV05-4SOT23-6C H 46C H 23C H 34V n 2V p 5C H 11F1FUSE(6V/1A)NUMAKER-EMWIN-RDK-N9H30 USER MANUALETH_PHY&CANR940R0603VDD33DGND U20SN65HVD230SO-8D 1GND 2VCC 3R4Rs 8CANH 7CANL 6Vref5CAN_TX0DGND CAN_RX0CB270.1uF C0603DGNDCON7SIP\2P\5MM SIP/2P_3.5MM12CAN_TX0CAN_RX0R96120R0603CAN0H CAN0L50MClkiPHY_RST Phy AD3CRS TitleSize Document Number Rev Date:SheetofETH_PHY&CAN1.0N9H30F51I_HMI_DEMOB 28Tuesday , Nov ember 27, 2018CON6RJ-45 8P8C_LED R/ARJ45\8P\JA\LEDTX+1TX-2RX+3NC 4NC 5RX-6NC 7NC8Shield 13Shield 14LED-9LED+10LED-11LED+12R841M R0603CT210uFR8975R78Col Col C760.01uF/2KVCK05CRSCT310uFC657pF C0603C640.1uFR9075R795.1K R0603R835.1K R0603C637pF C0603R8210K R0603C62N.C.C0603R850R0603R9275C670.1uFC660.01uF U19TS8121CTX+16TX-14NC 13TD-3TD+1RD+6RD-8NC5RX-9RX+11CT 2NC 4CT 7CT 10NC12CT 15R766.19K +/-1%R0603U18IP101GR TxEr/FxSD 1Xi 2Xo 3Col/RMII 4TxEn 5TxD36TxD27TxD18TxD09TxClk/50MClki 10LED0/Phy AD011LED3/Phy AD312IOVDD 13RxClk/50M_Clko 14RxD315RxD216TestOn 24MDIO 23MDC 22RxEr/Int3221CRS/LEDMod 20RxDV/CRS_DV 19RxD018RxD117nRst 32AVD3331MDiTp 30MDiTn 29RegOut 28MDiRp 27MDiRn 26Iset 25R88330R0603RMii0TxD1RMii0TxD0RMii0MDC R9175RMii0RxD1RMii0RxD0CT110uFRMii0MDio RMiiRxErr RMii0CRSDV MDI_TN MDI_TP RMii0TxEn C680.01uFMDI_RP MDI_RNX325MHz CRYSXIN1GND 2GND 4XOUT 3EthX1R95 5.1KCB250.1uF R770R0603CT410uF C690.01uF/2KVR86330R0603EthX0R8110K R0603EthX1R805.1K R0603EthX0R935.1KCB260.1uF R870R0603PHY_RXD0Phy AD0PHY_MDIO PHY_CRSDV PHY_RXD1MAC_REFCLKPHY_RXERR PHY_MDCPHY_TXD0PHY_TXEN DGNDVDD33PHY_TXD1Phy AVD33PHY_RSTRegOut DGNDPhy IOVD33RegOutDGNDDGNDDGNDDGND DGNDDGNDVDD33DGNDPhy AVD33Phy IOVD33DGNDDGND Phy IOVD33DGNDVDD33VDD33DGNDDGNDFGNDDGNDFGNDDGNDDGND RMii0MDio RMiiRxErr DGND FGND VDD33VDD33DGNDFGND50MClki RMii0Ref Clk FGNDR10210K R0603PHY_RST RMii0CRSDV C771uF C0603DGNDRX+TX-RX-TX+MDI_TNMDI_TP Phy AD3Phy AD3MDI_RP MDI_RNE t h e r n e t T P o r tPhy AD0Phy AD05 Revision HistoryDate Revision Description2018.10.03 1.00 1. Initially.2018.11.27 2.00 1. PCB version 2.1, supports Ethernet and CAN2021.03.26 2.01 1. Rename NuMaker-emWin-RDK-N9H30Important NoticeNuvoton Products are neither intended nor warranted for usage in systems or equipment, any malfunction or failure of which may cause loss of human life, bodily injury or severe property damage. Such applications are deemed, “Insecure Usage”.Insecure usage includes, but is not limited to: equipment for surgical implementation, atomic energy control instruments, airplane or spaceship instruments, the control or operation of dynamic, brake or safety systems designed for vehicular use, traffic signal instruments, all types of safety devices, and other applications intended to support or sustain life.All Insecure Usage shall be made at customer’s risk, and in the event that third parties layclaimsto Nuvoton as a result of customer’s Insecure Usage, custome r shall indemnify thedamages and liabilities thus incurred by Nuvoton.NUMAKER-EMWIN-RDK-N9H30 USER MANUAL。
广汽丰田EM作业操作评分表(10K )

10K作业要领评价表结果 %次数第 次销售店日期 年 月 日注:10K作业要领评价结果=按检查标准执行的总项目数/80×100% 自训期间每周点检一次责任人序号检查内容评价备注1检查车外观,三件套是否备齐---(左/右技师)2左技师检查雨刮器工作情况----喷射位置、雨刮的快、慢、间隙、去雾3确认作业项目---(左/右技师)4将系统台车、轮胎推车移动到相应位置----(左/右技师)5左技师进入车内(关车门、点火钥匙转到ON),降下四门玻璃、确认踏板行程、打开发动机盖、油箱盖、后备箱盖6左技师检查驻车制动和确认制动踏板自由行程7左技师启动发动机后检查仪表指示、方向盘工作情况8右技师以OK告知准备就序,左边技师以喇叭通知灯光检查开始9右技师按顺序检查后面灯光(左转向、右转向、刹车灯、倒车灯、小灯、牌照灯、后雾灯、危险警告灯))10左技师有按顺序检查前面灯光(近光、远光、大灯闪光及仪表上显示)11左技师检查中央门锁、车顶灯12左技师熄灭发动机,将点火钥匙打到“ON”,,确认左前安全带13左技师检查左前门控灯开关、关上车门、检查内外把手的锁止、解锁功能14左技师检查左后内外把手的锁止、解锁功能、打开车门关闭门窗、检查安全带和门控开关、关闭车门15左边技师检查油箱盖开关(向右转)16左边技师检查雨刮片是否老化17左技师打开引擎盖,安放好叶子板护垫(叶子板垫完全包裹叶子板)18左技师拧开机油加注口盖后,放在工具台车上19右技师打开尾箱盖,放置护垫,按要求移开尾箱内物品20右技师取出备胎放到系统台车上 、检查轮毂和轮胎表面、测量花纹深度和气压21右技师安装备胎、检查随车工具和尾箱照明灯、放回物品、关闭后尾箱盖(240V:需检查空气净化器)22右技师检查右后内外把手的锁止、解锁功能,打开车门关闭门窗、检查安全带(含中央安全带)、门控开关,关闭车门23右技师检查右前内外把手的锁止、解锁功能,打开车门关闭门窗、检查安全带和门控开关,关闭车门24放置好举升机垫块----(左/右技师)25右技师领取零件(机油、机滤、放油螺栓垫片)26检查垫块是否放置合适,发出声音“OK”----(左/右技师)27车辆刚离开地面,晃动前、后保险杆各2-3次,确认车辆是否稳定----(左/右技师)28左技师进入车内,放手刹、挂空档、关钥匙29右技师辅助左技师确定举升机高度,并一次性把集油车和工具(梅花扳手)带进车底30右技师放机油时不能让废油洒落(如果有,是否马上清洁)31左技师一次性带齐底盘螺栓检查用的扳手32左技师检查排气管O型环是否松动,确认排气管紧固33左技师按顺序紧固左右后悬挂、拉杆所有螺栓34左技师检查手刹拉线是否松动35左技师按顺序紧固左右前悬挂、转向连接机构所有螺栓36左技师检查方向机、前后燃油管、前后制动油管有无磨损、漏油37左技师检查左右方向横拉杆球头是否松动,左右传动轴护罩是否磨损、泄露38左技师检查发动机是否有漏油、漏水现象轮胎检查(左技师由左前到左后,右技师又右后到右前)39拆胎前上下左右摇晃检查轮胎轴承是否磨损---(左/右技师)40检查轮胎及胎铃情况---(左/右技师)41用轮胎深度规测量轮胎的花纹深度/测量3个点----(左/右技师)42按轮胎气压信息指示,用气压表检查/调整轮胎气压---(左/右技师)43升起台车,使用挂钩将轮胎固定在台车上---(左/右技师)44用化油器清洗剂清洁制动碟,用风枪吹干(视情况使用砂纸打磨)----(左/右技师)45先用扳手拧松刹车分泵下螺栓/1个---(左/右技师)46用系统台车上气动工具拆卸制动钳上的固定螺栓---(左/右技师)47用自制挂钩挂好制动分泵---(左/右技师)48测量刹车片厚度,清洁隔音片并涂抹润滑脂---(左/右技师)49检查活塞橡胶圈有否漏油---(左/右技师)50安装刹车片,先用气动扳手拧紧,再用扭力扳手拧到34NM(前)/27NM(后)---(左/右技师)51检查制动管道,用手拽后无脱落,目视确认是否漏油---(左/右技师)52确认减震器,用手掀起防尘罩,目视确认是否漏油---(左/右技师)53右技师是否更换油底螺栓垫片(用手带紧螺栓,扭力扳手拧到25N/M),用布擦干净54右技师将机油台车至于机油格下方,卸下机油格并清洁接口处55右技师安装新机油格(用手带紧,扭力扳手拧到13N/M)56左技师对放油螺栓、机油滤是否进行复检57右技师辅助左技师确定举升机下降位置(车轮刚接触地面发出声音“OK”)58左技师用扭力扳手按左前、左后、右后、右前顺序拧紧轮胎螺栓103N/M59右技师用机油加注枪加注机油(适量,为避免机油洒漏建议加注时使用漏斗)60右技师确认助力转向油、玻璃水、刹车油液面和渗漏61右技师检查蓄电池端子是否紧固、电池水是否充足62左技师取出空滤芯,并清洁63左技师进入车内、拉手刹、挂P档,听右技师指示启动发动机10秒钟后熄火,右技师确认机油油量----(左/右技师)64左技师听右技师指示将车辆再升起,右技师检查发动机机油的泄露65右技师通知车间主任确认作业项目66右技师收起发动机舱翼子板保护垫,盖好发动机盖其他67着装整洁(工作服、工作帽、着安全鞋)、不得外挂坚硬物品,进入车内取下帽子和手套,----(左/右技师)68作业时左/右技师是否保持良好的精神状态69举升机升/降时,左右技师是否能很好配合(站在适当位置,口令指挥)70车辆进/出作业工位,是否有相关人员指挥71系统台车、工具小车是否配备了必要的工具《EM工具》----(左/右技师)72是否正确使用系统台车----(左/右技师)73是否用双手打开、关闭引擎盖、后尾箱盖----(左/右技师)74开、关车门时,是否面向车门操作----(左/右技师)75作业时是否调换轮胎76作业时是否能保证适时装/拆废气管77作业步骤紧凑---(左/右技师)78作业不超时---(左/右技师)79不可垫在车体上填写票据----(左/右技师)80单据填写完整(维修结果、时间、签名)--(左/右技师)。
cp系列样本手册

标准型 CP1E-
-
-
-
-
-
CP1E-
CP1E-
CP1E-
CP1E-
出(源型)
E10DT1-A
N14DT1-A N20DT1-A N30DT1-A N40DT1-A
DC电源型
改良型 -
-
-
-
-
-
-
-
CP1E-
CP1E-
N30S1DT1-D N40S1DT1-D
-
-
CP1E-
CP1E-
N30SDT1-D N40SDT1-D
配备Ethernet通信功能
为了提高生产效率和质量,必须掌握生产现场的情况。 配备Ethernet通信端口的CP1H-EX、CP1L-EM/EL型无需使 用扩展单元、选装件即可连接PC,从而实现信息管理。 实现低成本的系统构建。
简单定位功能
装配装置、机床、工件搬运等自动化、省人工化需使用替 代人手进行作业的伺服电机定位。 CP1H可通过内置功能实现最多4轴的伺服电机控制。
180
N型 14点 8 6 不可拆装 14 不可
20点 12 8
20
30点 18 12
40点 24 16
150
160
可(最多3台)
60点 36 24
180
NA型 20点 12 8
140
安装CJ系列高功能
不可
I/O单元、CPU高功能单元
输入中断/输入中断计数 4 器模式/脉冲捕捉输入
高速计数器 (加法脉冲输入)
CP1ENA20DR-A CP1ENA20DT-D CP1ENA20DT1-D
8
CPU 单元
CP1L
L型
sas em的操作流程

sas em的操作流程SAS EM(Enterprise Miner)操作流程SAS EM是一款强大的数据挖掘和数据分析工具,广泛应用于商业、金融、科研等领域。
以下是一份详细的SAS EM操作流程,涵盖了数据准备、模型构建、结果分析和报告生成等步骤。
一、数据准备1. 导入数据:使用SAS EM的数据导入功能,将数据文件(如CSV、Excel、SQL等)导入到SAS数据集。
2. 数据清洗:对导入的数据进行清洗,处理缺失值、异常值、重复数据等。
3. 数据转换:根据分析需求,对数据进行转换和规范化,例如重新编码分类变量、拆分训练和测试数据集。
二、模型构建1. 创建数据流:将清洗和转换后的数据组织成数据流,以便于模型构建。
2. 创建节点:在数据流中创建节点,包括预测模型(如分类、回归、聚类等)和相关分析器(如决策树、神经网络、关联规则等)。
3. 参数设置:为节点设置适当的参数,如训练参数(如随机森林、逻辑回归)、精度指标(如准确率、召回率)等。
4. 模型训练:执行训练操作,让SAS EM自动优化模型参数,并生成模型。
三、结果分析1. 模型评估:使用验证数据集评估模型的性能,如计算精度指标、绘制混淆矩阵等。
2. 特征重要性分析:使用SAS EM的特性重要性分析器,识别对模型贡献最大的特征。
3. 变量选择:使用逐步回归、LASSO等方法进行变量选择,优化模型性能。
四、报告生成1. 生成报告模板:根据需求创建报告模板,包括表格、图形、文字描述等。
2. 插入结果:将模型评估结果、特征重要性分析结果、变量选择结果等插入报告中。
3. 报告发布:将报告导出为PDF、Word或其他格式,以便于分享和存档。
总结通过以上步骤,您可以使用SAS EM进行数据挖掘和分析。
在实际操作过程中,您还需要根据具体情况进行调整和优化。
请注意,本流程仅提供了一般性指导,具体操作可能因数据和业务需求而有所不同。
建议在实施前进行充分调研和测试,以确保流程的准确性和适用性。
亲和传播聚类算法的流程图及具体步骤

亲和传播聚类算法的流程图及具体步骤下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!亲和传播聚类算法的流程图与具体步骤解析亲和传播(Affinity Propagation)是一种非中心化的无参数聚类算法,它通过消息传递的方式在数据点之间进行交互,寻找“示例”数据点,即那些能代表一个簇的典型数据点。
EM送样培训参考PPT
1
1.外协零件实验大纲编制要求 2.外协零件二次配套清单要求 3.外协零件试验和送样要求 4.外协零件EM报告填写要求 5.外协零件EM送样零件准备要求 6.EM送样流程 7.EM送样对外协零件的主要关注点
2
1.格式要求:编写大纲格式必须使用YFV提供的标准格 式编制
5
1.供应商必须在YFV要求的时间节点前完成自检 试验。
2.试验内容严格按试验大纲进行,未和YFV相关 工程师确认不得更改实验内容
6
3.材料试验需从零件上取样进行,若零件太小 无法取样才打样条测试,零件颜色不同需分 别测试。
4.供应商提交YFV自检报告时必须附试验后样品 ,否则YFV不接收试验报告
7
5.试验地点选择要求,YFV不明确要求供应 商选择哪家实验室进行试验,但若供应商 提交试验结果后,经过SVW自检后和供 应商提交的结果有严重出入造成试验进度 拖延或者罚款的,一切后果由供应商承担 ,所以供应商自检务必保证试验的真实性 和样品状态的一致性。
8
外协零件EM报告由供应商自行填写后提 交延锋,填写方法和格式详见附件
2.按SVW EM送样格式,将YFV及供应商 的自检报告转为EM报告格式。
12
3.准备好零件的二次配套清单,零件样品标识, 零件(按大众要求,总成5套,各散件(大件: 上体、下体、风道等)5件,(小件:出风口叶 片,连杆等)10件,BMG零件翻倍。颜色分开。
13
4. 准备完成后,工程向MQS相关工程师申 请送检单。
5.拿到送检单后去MQL进行EM送样,MQL 受理工程师:上官晓燕(69563467)
6.封面盖章最后需交到MQS一份。
14
gnps中fbmn操作流程
gnps中fbmn操作流程GNPS中的FBMN操作流程引言:GNPS(Global Natural Product Social Molecular Networking)是一个用于天然产物的质谱数据分析和共享的在线平台。
其中,FBMN(Feature Based Molecular Networking)是GNPS中的一种操作流程,用于将质谱数据进行特征提取,并通过网络图谱的方式展示不同样本之间的相似性和差异性。
本文将详细介绍FBMN 操作流程的步骤和原理。
一、数据预处理在进行FBMN操作之前,首先需要对原始质谱数据进行预处理。
这一步骤主要包括峰提取、去噪、归一化和质量筛选等操作。
峰提取是将质谱数据转化为峰的形式,方便后续的特征提取和分析。
去噪操作是为了去除质谱数据中的噪声信号,提高信号的质量。
归一化是为了消除不同样本之间的信号强度差异,使得不同样本之间的比较更加准确。
质量筛选是为了去除质谱数据中的低质量峰,提高分析结果的可靠性。
二、特征提取在数据预处理完成后,接下来进行特征提取。
特征提取是将质谱数据转化为代表化合物的特征,通常是通过计算质谱峰的质量-荷质比和峰强度等信息来实现。
特征提取的目的是为了将复杂的质谱数据简化为一组可比较的特征,方便后续的相似性分析和差异性分析。
三、特征过滤在特征提取之后,需要进行特征过滤。
特征过滤是为了去除无关的特征,提高分析结果的可信度。
常用的特征过滤方法包括去除信号强度较低的特征、去除在大多数样本中未出现的特征等。
特征过滤的目的是为了减少数据的复杂性,提高后续分析的效率和准确性。
四、特征网络构建特征网络构建是FBMN操作的核心步骤。
在这一步骤中,根据特征之间的相似性,将不同样本中的特征连接起来,构建一个特征网络。
特征网络的节点表示化合物的特征,边表示特征之间的相似性。
通过特征网络,可以直观地展示不同样本之间的相似性和差异性,帮助研究人员进行样本分类和发现新的化合物。
物料千尺用量(WI-ME-19-14)

文件更改申请单东莞亿立线路板有限公司DONGGUAN YILI CIRCUIT PLATE CO., LTD.A WHOLLY OWNED SUBSIDIARY OF EXCEL INT’L HOLDINGS LTD.文件状态正本印章副本印章收件识别印章文件名称: 物料千尺用量文件编号: WI-ME-19-14版本:06文件更改覆历性质及项号修订更改性质及项号制订人生效日期- 1 2 3第六版修改page5、page6电镀铜角/铜波用量修订部分物料千尺用量的内容增加沉镍金保护胶纸千尺消耗李帮超王优林汪金顺肖尊民黄怀光06 Aug 200630 Nov 200625 Jan 2007Page 1 2 3 4 5 6 7 8 9 10 11 12 13 14修订号 2 2 2 2 2 2 2 3 2 2 2 2 2 2审批:“V”指定部门批核,“Y”总经理或其它参与部门批核。
审批部门第 06 版修订 3分发部门ADMGM YMATL V MATL ME V ME EM V EM MKTPE VPROD V PROD PPCQA V QA IPQC V IPQC TQM V TQM * 同一版本可修订5次,超过5次则应更换版本前言物料千尺用量是在生产饱和情况下,连续生产时估算的生产用量,仅供生产、PMC参考,在生产不饱和的情况下,部分物料用量会与此数据相差较大,生产部、PMC可按实际情况进行领料、发料。
附表1:多层板附表2:双面板和单面板附表3:锣刀广州陶粒,广州陶粒厂5wrVFkK3gXQ2。
KNIME教程

入门指南我们现在想把你整个过程一步一步的建立一个小的、简单的工作流:我们读在数据从一个ASCII文件,指定颜色,集群数据并显示数据表和散点图。
当我们执行这个流程我们将检查数据模型已经建立。
我们假设你刚刚开始KNIME空着的工作流。
更全面的KNIME快速入门指南,也包含在KNIME下载可以在这里找到。
添加节点在节点库扩大“输入输出”和“读”类别中,如低于(左图像)和拖放文件阅读器图标工作流编辑器窗口。
下一个节点现在将k -均值聚类算法。
扩大“挖掘”类别紧随其后的是“聚类”的类别,然后拖动节点k - Means流(图右)。
在搜索框中输入“颜色”节点存储库并按下enter。
这限制了节点显示的“颜色”在他们的名字(见上图中)。
拖动颜色马槽节点工作流(该节点将定义在数据视图的颜色之后)。
看到所有节点在库再一次,按下ESC或退格键在搜索字段节点的存储库。
现在,拖动互动表和散点图从“数据视图”范畴的工作流编辑器和位置它右边的颜色管理器节点。
连接节点现在你需要连接节点为了得到数据流。
点击一个输出端口并拖动连接到一个适当的输入端口。
完整的流程如下图所示:你的节点不会显示一个绿色的状态,只要他们不是配置和执行。
配置节点完全连接节点和一个红色状态图标需要配置。
先从文件阅读器,右键单击它并选择“配置”菜单。
导航到“IrisDataSet”目录KNIME位于安装目录。
选择数据。
所有文件从这个位置。
文件阅读器的预览表显示了一个示例数据。
点击OK以关闭对话框的文件阅读器节点。
一旦节点已被正确配置,它切换到黄色(意味着准备好执行)。
在那之后,k -均值节点立即变成黄色,作为其默认设置被应用。
可以肯定的是,默认的设置符合您的需要,打开对话框,检查默认设置。
为了配置颜色管理器节点你必须首先执行节点k -均值。
执行后,所有的名义值和范围的属性是众所周知的:这个meta信息被传播到继任者节点。
颜色管理器需要这个数据之前可以对它进行配置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(右)技师
1
辅助左边技术员确认举升机下降 位置 安装废气管 添加机油
车轮刚接触地面就通知左边技术员停 止下降,确认周围安全,发出声音OK 注意不要碰伤车身、不要落地 将4.4升机油(2.7排量)/6.1升机油 (3.5排量)倒入机油壶,将油壶的机 油加入发动机 没在指定范围内就补充 检查电池端子、电解液液面及蓄电池电压
4 5
检查发动机机油的泄漏
填写环车检查单和施工单,并签名 放回到车辆驾驶员侧的仪表台上
洗 车 开去洗车工位进行洗车
洗 车 在后方引导
交 将车辆开往交车工位,车头朝外 车
将钥匙,工单和环车检查单交 给服务顾问
整 在工位进行5S 理
注: 1.如果使用大桶装机油,在加机油时直接将6.1升机油加入发动机. 2.如果洗车工位繁忙,则技师先进行车辆清洁.
10,000KM 作业流程 4
作业流程 1 1 作业流程 22
作业流程3
作业流程4
作业流程
1
9 6
3
举升机位置4
洗车作业
2 7 6
5
1
4 5
3 842Fra bibliotek(左边)技师 1
将车辆降下 准备扭力扳手 左前轮轮胎螺母扭矩确认 左后轮轮胎螺母扭矩确认 右后轮轮胎螺母扭矩确认 右前轮轮胎螺母扭矩确认 确认周围安全,发出声音OK 将扭矩扳手设定到规定的 扭矩(103N·M) 有“咔嚓“的一声后即可,不可 过度加力 有“咔嚓“的一声后即可,不可 过度加力 有“咔嚓“的一声后即可,不可 过度加力 有“咔嚓“的一声后即可,不可 过度加力 清洁⇒拿出滤芯并清洁 更换⇒更换新空气过滤器 做好起动发动机的准备工作 听从右边技术员指示 听右边技师的指示 确认周围无人 听右边技师的指示 听从指挥,确认安全 通过对讲机或其它方式沟通 复检作业内容,确认有无追加项 目,最终确认一切正常,签字 确认周围无人 不要有划痕 放回左前边固定位置 确认安全并发出声音OK 再把右侧轮胎车复位 将右边举升垫块拿走 放回右前边固定位置 确认安全并发出声音OK 确认机油油量 如不够就补充 确认周围安全,发出声音OK 指挥左边技术员起动发动机 确认周围安全,发出声音OK 确认刹车油量和渗漏 油量在指定范围内
2 3 4 5 6 7
2 3
确认前挡玻璃雨刮水量和渗漏 检查蓄电池
检查空气过滤器 进入车内拉手刹,挂P挡。 起动发动机(运转10秒以上) 关闭发动机
8 拆掉废气管 9
将车辆再升起确认发动机有否泄漏 将车辆完全降下 通知车间主任确认作业项目 车间主任确认 收起发动机舱翼子板保护垫 盖好发动机盖 再把左侧轮胎车复位 将左边举升垫块拿走
第 8 页,共 8 页