2013中国机器人大赛RoboCup标准平台组技术挑战赛比赛规则
医疗与服务机器人比赛规则

2013中国机器人大赛暨RoboCup公开赛医疗与服务机器人赛项实施方案(比赛规则)2013年6月5日一.概述机器人向实际应用方向发展有其重要的现实意义,研发面向实际应用的机器人有长远的价值。
医疗与服务机器人赛项正是引导机器人向实际应用方向发展的重要切入点。
2013年中国机器人大赛暨RoboCup公开赛医疗与服务机器人赛项的比赛规则调整如下。
1.实施本项目具有长远的战略意义机器人要真正“实用”是极其艰难的,尤其是“医用”更是难乎其难,需要大批拔尖创新人才、高技能人才为之长期攻关和付出。
因此实施本项目具有长远的战略意义。
在上海举办的举世瞩目的世博会上,欧洲馆的主题是:“智能欧洲。
”可见世界发达国家已把机器人的研究方向定位到开发成智能化的产品。
在这种国际背景下中国机器人大赛暨RoboCup公开赛组委会审时度势把医疗与服务机器人设立为赛项,旨在引领我国有识之士投身到医疗与服务机器人的研发与竞赛中来。
2.实施本项目是当务之急虽然机器人的实际应用尤其是医用不是一蹴而就的,但不能阻挡我们只争朝夕地研发和向实际应用方向前进的脚步。
在产品向智能化方向发展的大环境下,我国大学生已进行了多届机器人大赛,有了良好的基础。
引领参赛选手向机器人实际应用方向发展已是水到渠成。
我国目前每年要进口数以千亿元计的医疗器械,尤其是昂贵的医疗手术机器人(进口的达芬奇手术机器人每台的价格高达2千多万元)。
因此引领我国大学生参加医疗与服务机器人竞赛,尤其是引领他们创新设计研制医疗与服务机器人已经成为当务之急。
3.实施本项目的可操作性基于上述分析,大赛组委会决定设“医疗与服务机器人组”,希望通过此项目比赛增强选手的实际应用能力,尤其是增强选手普遍关注的在高科技领域就业的竞争能力。
本赛项为选手提供广阔的施展才华的舞台,同时也让选手有章可循。
技术委员会既考虑项目的实用性、先进性、新颖性,更考虑到项目的可参与性和可操作性以及在经济上的可承受性,也就是着重考虑使项目适合竞赛,符合学校实际、学生实际,因此特决定把竞赛分为独立的两个子赛项:1)医疗与服务机器人规定动作赛项,本赛项兼设青少年组;2)医疗与服务机器人创新设计与制作赛项,本赛项兼设青少年组和教师发明组。
RoboCup仿真组(2D)比赛规则

2013中国机器人大赛暨RoboCup中国公开赛仿真组(2D)比赛规则2013中国机器人大赛暨RoboCup中国公开赛仿真组技术委员会制定1. 比赛环境比赛所用机器安装Ubuntu 12.04 64 位操作系统,仿真环境采用RoboCup官方网站发布的最新版本,即rcssserver-15.1.0或以上(机器配置待定)。
2. 比赛方式比赛将分两组同时进行。
所有比赛将全部由自动脚本(或者裁判)启动。
每支参赛队伍需要提供一个start脚本和一个kill脚本(脚本模板待定)。
比赛结束后,所有参赛队伍参加的最后一轮比赛的可执行码将统一发布。
3. 预选阶段本次比赛将设立预选阶段。
2012中国机器人大赛暨RoboCup中国公开赛仿真组(2D)比赛的前三名直接获得本次比赛的参赛资格,其他所有球队必须参加预选阶段的审核。
预选阶段需要提交如下两份材料:①球队描述文档:文档中必须明确指出球队所使用的底层代码(包括版本号和下载地址),以及球队在该代码基础上所做的主要工作。
②球队与所使用的底层代码的比赛录像3000周期(提交*.rcg)。
技术委员会将对所有报名球队的材料进行审核,只有审核通过的球队才能获得本次比赛的参赛资格。
4. 比赛安排现场比赛将分为三个阶段:①小组赛:根据现场比赛的球队数目,小组赛分为若干轮进行,最终前8名的球队进入8强赛。
②8强赛:在8强赛中实行双败赛制,即任何一支队如果先后败给其他球队两次则被淘汰。
在8强赛中必须决出胜负,如果正常的比赛中双方打平,则进行2000周期的加时赛。
在加时赛中不采用金球法。
如果加时赛中仍不能决出胜负,则进行点球大战。
如果有一方不能正常进行点球,则能进行的一方获胜;如果双方都不能正常进行点球决战,则重赛一场。
③排名赛:对8强赛中被淘汰的球队两两进行排名的比赛。
5. 比赛积分规则①积分规则:在小组赛阶段,每支参赛队伍胜一场记3分、平一场记1分,负一场记0分。
②平分处理:在小组赛阶段,如果两个或两个以上的球队出现了积分相同的情况,则首先比较净胜球数,如相同则比较进球数,如再次相同则以相互成绩决定名次。
机器人大赛比赛规则

机器人大赛比赛规则机器人大赛比赛规则一.比赛主题“夺宝奇兵”。
每个人心中都有梦想,梦想对于每个人都是无价之宝,但是真正去实现自己的梦想,必须去靠我们的智慧和勇气去努力拼搏。
过程中纵然会有艰难险阻,会有重重迷雾,只要我们有冷静的头脑,有缜密的分析,有持之以恒的精神,面对挑战的勇气,我们并定会找到属于我们的宝物,实现自己的人生梦想。
让我们用我们制作的机器人去帮助我们夺取宝物,实现我们人生中的科技梦想。
本次比赛的主题为“夺宝奇兵”。
机器人的任务就是经过艰难险阻夺取宝物。
过程中机器人需穿过复杂地形,途中读取条形码,根据提取到的关键信息判定藏有机关的密室,通过寻磁方式找到机关控制器,关闭机关,然后从多个物体中识别出宝物密钥,将密钥推到开关区,最后抵达宝物密室,触发开关,表示成功夺取宝物。
二.场地说明参考场地如下图:1.比赛场地:长600cm,宽300cm,场地四周围有高5cm的挡板。
地板基本平整,场地左右两边镜像对称,表面材料为:白色免漆板。
场地中铺有黑色引导线,宽度为5cm。
一些地方设有交叉线标记位置,宽度5cm,长20cm。
2.启动区(图中标号[1]区)分红、蓝两区,分别由红线和蓝线圈定,双方机器人各占一个启动区,具体颜色由开赛前抽签决定。
机器人需在启动区识别场上开赛声音信号(一定频率的声音信号,持续一段时间后停止,声音开关由裁判长控制),自动开始比赛。
3.跷跷板(图中标号[2]区)面积:160cm×50cm,高度:30cm跷跷板中间有黑色引导线,板两端与地面平滑衔接,在跷跷板前10cm处有交叉线提示位置。
跷跷板中间有交叉线提示位置,交叉线长度同跷跷板宽度。
机器人需在跷跷板上停留一段时间,在20秒内使跷跷板两端同时离开地面的时间尽可能长,期间可多次通过跷跷板,取最长停留时间。
若最长停留时间不足20秒则比赛结束时在总完成时间上累加缺少时间的4倍。
4.解码区(图中标号[3]区)在黑色引导线两侧分别有一段总长度25cm、宽度10cm和总长度25cm、宽度20cm的条形码(后者为两个场地共用),距离引导线10cm。
RoboCup仿真组(3D)比赛规则

2013中国机器人大赛暨RoboCup公开赛RoboCup机器人足球仿真组(3D)比赛规则这篇文档介绍2013年中国机器人大赛暨RoboCup公开赛机器人足球仿真3D组的比赛规则。
比赛规则制定的宗旨是保证比赛的公平性和流畅性。
技术委员会有权在任意时刻合理的修改比赛规则,并会及时通知各参赛队伍。
各参赛队伍如果对比赛规则有意见或者建议可以向技术委员会反馈,技术委员会保留最终决定权。
技术委员会联系方式:邮箱地址kian.hsueh@。
1.比赛赛程安排1.1注册阶段所有参赛球队都需要注册,请将以下信息发送至技术委员会邮箱:●球队名称;●国家;●学校名称;●队伍成员(请注明指导老师和领队);●联系邮箱;●球队描述文档;●球队可执行码;注册截止日期是2013年9月15日。
请确保球队可执行码可以在比赛规则要求的环境中正常运行(详见比赛规则机器配置与软件环境)。
如果注册通过,技术委员会会尽快回复一封确认邮件。
1.2预选赛阶段本次比赛将设立预选阶段。
2012中国机器人大赛暨RoboCup中国公开赛仿真组(3D)比赛的四强(南京邮电大学,东南大学,常州工学院,河海大学)直接进入现场比赛阶段,其他所有球队必须参加预选阶段的审核。
预选阶段需要提交如下两份材料:●球队描述文档:文档中须介绍球队的底层框架,以及在球队方面所做的主要工作。
●球队可执行码:可执行码以11VS11进行对战,需包含start.sh和kill.sh脚本以及所依赖的所有库文件。
请在64位ubuntu系统下编译可执行码后再提交。
请所有需要进行预选阶段的球队将所需材料打包,命名为“球队名.tar.gz”,发送到技术委员会邮箱,截止日期是2013年9月25日,注册阶段已经发送过的队伍,可以不用重复发送。
技术委员会将对所有报名球队的材料进行审核,如果审核通过,技术委员会会尽快回复一封确认邮件。
只有审核通过的球队才能获得本次比赛的参赛资格。
1.3现场比赛阶段TBA2.比赛日程安排TBA3.机器配置和软件环境3.1ServerTBA3.2ClientTBA3.3Software操作系统:Ubuntu 12.10(64bit)依赖库:ODE 0.11.1 + TBB patch, Ruby >= 1.9.3p194仿真环境:simspark 0.2.4, rcssserver3d 0.6.74.获胜规则4.1循环赛阶段循环赛阶段,小组内每两支队伍之间都要进行一场比赛。
【VIP专享】2013年中国机器人大赛双足竞步机器人组比赛规则2
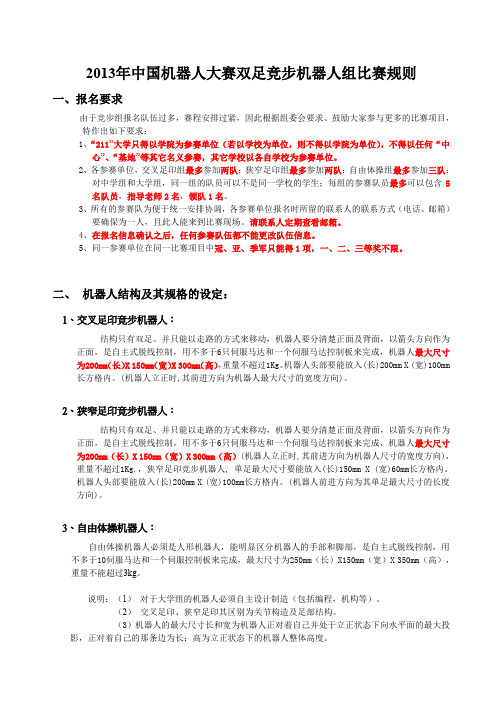
2013年中国机器人大赛双足竞步机器人组比赛规则一、报名要求由于竞步组报名队伍过多,赛程安排过紧,因此根据组委会要求、鼓励大家参与更多的比赛项目,特作出如下要求:1、“211”大学只得以学院为参赛单位(若以学校为单位,则不得以学院为单位),不得以任何“中心”、“基地”等其它名义参赛,其它学校以各自学校为参赛单位。
2、各参赛单位,交叉足印组最多参加两队;狭窄足印组最多参加两队;自由体操组最多参加三队;对中学组和大学组,同一组的队员可以不是同一学校的学生;每组的参赛队员最多可以包含5名队员,指导老师2名,领队1名。
3、所有的参赛队为便于统一安排协调,各参赛单位报名时所留的联系人的联系方式(电话、邮箱)要确保为一人,且此人能来到比赛现场。
请联系人定期查看邮箱。
4、在报名信息确认之后,任何参赛队伍都不能更改队伍信息。
5、同一参赛单位在同一比赛项目中冠、亚、季军只能得1项,一、二、三等奖不限。
二、机器人结构及其规格的设定:1、交叉足印竞步机器人:结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达和一个伺服马达控制板来完成,机器人最大尺寸为200mm(长)X 150mm(宽)X 300mm(高),重量不超过1Kg。
机器人头部要能放入(长)200mm X (宽)100mm 长方格内。
(机器人立正时,其前进方向为机器人最大尺寸的宽度方向)。
2、狭窄足印竞步机器人:结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达和一个伺服马达控制板来完成,机器人最大尺寸为200mm(长)X 150mm(宽)X 300mm(高)(机器人立正时,其前进方向为机器人尺寸的宽度方向),重量不超过1Kg.,狭窄足印竞步机器人, 单足最大尺寸要能放入(长)150mm X (宽)60mm长方格内。
RoboCup中型组机器人比赛规则(MSLR).

RoboCup中型组机器人比赛规则(MSLR)陈卫东叶道年张小冰等编译上海交通大学自动化研究所目录第一章RoboCup比赛项目 (3)1.1国际规则项目 (3)1.22Vs2项目 (3)第二章RoboCup国际规则 (4)●规则1 -比赛场地要求 (4)——规则1.1 尺寸 (4)——规则1.2 场地标识 (5)——规则1.3 球门区 (5)——规则1.4 罚球区 (5)——规则1.5 旗杆 (6)——规则1.6 角弧 (6)——规则1.7 球门 (6)——规则1.8 安全 (7)●规则2 -比赛所用球 (8)——规则2.1 质量和尺寸 (8)——规则2.2 受损球的替换 (8)●规则3 -比赛队员装备 (9)——规则3.1 安全性 (9)——规则3.2 基本装备 (9)——规则3.3 守门员 (11)——规则3.4 犯规和制裁 (11)——规则3.5 重新比赛 (11)●规则4 -裁判及助理裁判 (12)——规则4.1 裁判之权威 (12)——规则4.2 权力与职责 (12)——规则4.3 助理裁判 (12)——规则4.4 裁判判决 (12)●规则5 -比赛时间 (13)——规则5.1 半场 (13)——规则5.1 中场休息 (13)——规则5.2 补时 (13)——规则5.3 罚球 (13)——规则5.3 加时 (13)——规则5.4 中途终止之比赛 (13)●规则6 -比赛开始与重新开始 (14)——规则6.1 开球 (14)——规则6.2 开球过程 (14)——规则6.3 开球的犯规及措施 (14)●规则7 -比赛的进行与暂停 (15)——规则7.1球赛暂停 (15)——规则7.2 球赛进行 (15)●规则8 -比赛的计分 (16)——规则8.1 进球得分 (16)——规则8.2 比赛胜利 (16)——规则8.3 竞赛规则 (16)●规则9 -犯规行为 (17)——规则9.1 停球与持球 (17)——规则9.2 踢球与运球 (17)——规则9.3 犯规及其犯规后的处罚 (18)●规则10 -任意球与罚球点及点球 (20)——规则 10.1 任意球 (20)——规则10.2 任意球的位置 (20)——规则10.3 任意球犯规/制裁 (20)——规则10.4 罚球 (21)——规则10.5 球出边界的处理 (22)——规则10.6 球门发球 (22)●规则11- 上场队员的人数 (23)第三章RoboCup 2Vs2项目规则 (24)3.1 2Vs2比赛基本规则 (24)3.2 2Vs2比赛其它规则 (24)第一章RoboCup比赛项目RoboCup的原意为机器人世界杯(Robot World Cup)。
机器人搬运比赛规则

2013 中国机器人大赛暨 RoboCup 公开赛
机器人搬运比赛
规则
2013-6-1
竞赛联系人:中国矿业大学 王军 公共邮箱(技术讨论、资料下载):zhinengbanyun@,密码 123456
⑴ 整个比赛过程,机器人必须自主完成比赛任务,不能人为干涉机器人(包括 直接接触和场外遥控等)。发生人为干预机器人的现象,记 0 分。
⑵ 参赛队之间不能互相借用机器人,同一个机器人只能代表一支参赛队比赛。 发生借用他队机器人的现象,记 0 分。
⑶ 比赛终止时,正在移动的料块不得分,记 0 分。
5
规则二 比赛场地(Ⅱ)与记分标准
说明: 获取搬运一个料块的分值的条件:结束比赛后,物料必须与机器人脱离,才能 获取搬运该料块的分值。 获取返回出发区分值为 10 分的条件:限定机器人至少完成一个料块的搬运且 搬运料块要有得分,才能获得返回出发区得分。 2.出现下列情况,不得分: ⑴ 整个比赛过程,机器人必须自主完成比赛任务,不能人为干预机器人(包 括直接接触和场外遥控等)。发生人为干预机器人的现象,记 0 分。 ⑵ 参赛队之间不能互相借用机器人,同一个机器人只能代表一支参赛队比赛。 发生借用他队机器人的现象,记 0 分。 ⑶ 比赛终止时,正在移动的料块不得分,记 0 分。
2.分拣料块得分原则: 结束比赛后,物料必须与机器人脱离,才能计算分数。
3.返回出发点得分原则: 比赛终止时刻,机器人若有一个轮子与地面的接触点在出发区内,并且机器人
已经停止动作,则认为已经回到出发点,得 10 分。 若机器人无法自动回到出发区时,参赛队员可以口头通知裁判提前终止比赛,
2013中国机器人大赛RoboCup救援机器人比赛规则
2013 Robocup救援机器人组(RRL)比赛规则1、比赛简介:救援机器人组比赛的目的是为促进城市搜救研机器人技术的研究与发展,通过竞赛可以为救援机器人在复杂环境下运作提供性能客观评价标准。
比赛中,各参赛队需要完成具有挑战性的任务,在完成任务的过程中充分展示其救援机器人性能(机动性,感知能力,定位建图能力,操作界面,远程操控性、自主能力等)。
比赛是一个救援机器人技术进步展示的舞台,也是检验救援机器人系统的实验场。
比赛的最终目标是将机器人用于真正的救援任务。
比赛任务是控制救援机器人在迷宫式的场地中搜救模拟的被困者,获胜队伍必须能够很好的完成3~5个任务。
每个任务要求救援机器人从场地中的指定点出发,在规定时间内找到最多数目的被困者,比赛成绩将按照完成所有任务后的总分高低排出冠、亚、季军。
另外设置三个单项比赛奖――自主运行挑战赛、建图挑战赛和通过能力挑战赛。
单项奖评比是综合常规比赛和专场比赛的得分来确定。
2、比赛背景一座建筑物在地震中倒塌,突发事件处理救援队负责在事发地点组织救援,请求增派救援机器人协助搜救建筑物内的被困者,以防余震造成的再次伤害。
在建筑物入口处环境状态未被破坏,但是随着进入建筑物内部,毁坏程度将会逐步增加。
救援机器人及其操作者的任务就是确定现场环境、寻找被困者,并将获得的信息(被困者位置和状态)标记在救援机器人所建立的现场地图上。
3、评分依据比赛主要考核的机器人性能包括以下几个方面:⏹能够通过危险,倒塌和杂乱的环境;⏹确定被困者状态和被困者位置;⏹自动建立环境地图;⏹机器人的自主运行能力。
在比赛中展示机器人的其他性能也会被提倡和受到欢迎,包括:⏹递送救援物资;⏹安置传感器及监控环境;⏹标示和计算到达被困者距离最近的路径;⏹帮助被困者脱离危险(比如提供对建筑结构的支撑或其他安全措施,帮助被困者逃脱)。
4、场地特征场地分为:黄区,桔区,红区。
黄区是(处处是倾斜地面的?)迷宫地域,桔区是楼梯、斜坡、高台等组成的障碍区域,红区是在桔区场地基础上增加立方体地板组成的障碍。
2013中国机器人大赛暨RoboCup公开赛汇报总结
2013中国机器人大赛暨RoboCup公开赛汇报总结学校:上海理工大学队伍名称:先锋二队参赛队员:高鸿飞张波赵统帅浩天指导老师:王飞徐志林报告人:张波时间:2013年10月目录第一章赛事介绍------------------------------2第二章参赛项目介绍--------------------------3第三章机器人比赛应用软件介绍----------------5第四章机器人个硬件模块介绍------------------6第五章比赛经验总结和心得体会----------------8第一章赛事介绍-中国机器人大赛暨RoboCup公开赛(以下简称“机器人大赛”)是我国最具影响力、最具权威性的机器人技术大赛,每年举办一届,已分别在苏州、兰州等城市成功举办了十三届。
今年在安徽建筑大学举办。
机器人竞赛是近年来国际上迅速开展起来的一种高技术对抗活动,它涉及人工智能、智能控制、机器人、通讯、传感及机构等多个领域的前沿研究和技术融合。
它集高技术、娱乐和比赛于一体,引起了社会的广泛关注和极大兴趣。
今年共有112项机器人比赛,我们参加的竞赛项目是光电搬运组。
第二章参赛项目介绍比赛目的:设计一个小型轮式或人形机器人,模拟工业自动化过程中自动化物流系统的作业过程。
机器人在比赛场地内移动,将不同颜色、形状或者材质的料块分类搬运到设定的目标区域。
比赛记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低比赛内容及任务1.轮式光电组。
2在规定时间内,机器人从出发区出发,完成物料的分拣搬运,回到出发点。
3.轮式摄像头组、轮式光电组、人形摄像头组和青少年组:使用比赛场地(Ⅰ)。
从放在暗盒中的颜色分别为黄、白、红、黑、蓝 5 个料块中抽取 3 个料块,依照抽出顺序依次摆放在 A、C、E 位置。
机器人从出发区出发,将料块搬运到对应颜色的目标区,然后回到出发区。
4.标准平台组:使用比赛场地(Ⅱ)。
裁判现场随机将 18 个三色料块平铺放置在物料区内。
2013年中国机器人大赛舞蹈机器人大学组(常规组)比赛规则
2013年中国机器人大赛舞蹈机器人大学组(常规组)比赛规则本组参赛机器人可以采用市场销售的常规成品设备。
同时,鉴于双足人形机器人在平衡控制方面具有较高的技术要求,为了增强比赛的技术性和观赏性,比赛项目分为:(一)双足人形组(不含轮式机器人)(1)参加比赛的每一台机器人,其机体必须符合人体构型,明显有两条腿、两只手臂、一个头及躯干部分;(2)机器人必须有不少于十五个关节自由度组成(伺服舵机或伺服电机);(3)两条腿及足部之间不能有任何连接机构;(4)成品机器人容许添加辅助机构,但该机构上不得带有动力元件;(5)每一个机器人本体必须搭载独立的电源和控制系统。
(二)多足异形组(含轮式机器人)(1)参加比赛的机器人,其机体构型不做限制,也可以容许有双足人形机器人配合参与比赛,但不能做为主体部分;(2)机器人必须有不少于十五个关节自由度组成(伺服舵机或伺服电机);(3)机器人本体可以是独立整体结构,也可以是分体组合结构;(4)成品机器人容许添加辅助机构,机构上可以带有动力元件;(5)每一个机器人本体(含分体部分)必须搭载独立的电源和控制系统。
比赛规则:一、比赛场地:1、舞台:组委会提供两种比赛场地,参赛队可任选其中一种场地参加比赛。
第一种:舞蹈场地是2m×2m的平坦区域,场地为平整硬质木板,周围有高10cm一体化围墙。
第二种:舞蹈场地是2m×2m的平坦区域,场地为绿色薄地毯,地毯厚为2mm-3mm,地毯下为平整硬质木板,周围有高10cm一体化围墙。
在场地四角各有一直径40cm的大圆,4个角的大圆分别与场地的直角边框相切。
每个大圆中间再套一个直径20cm的小圆。
机器人的初始摆放位置必须放在场地中央(若多个机器人,平行(与场地边框)排成一排放在中央)。
只要在表演过程中,任意一台机器人的身体任意部分接触到任意一个小圆位置,即可得到有效加分(5分),否则不加分,该项加分不累计(即:与机器人接触小圆的次数无关)。
robotcup中国机器人大赛

子女给机器人传达取药任务,机器人自主完成取药,送到老人身边,并监督 老人喝药。
技术要求 服务机器人自主完成本阶段的比赛。
子女发出指令。指令正确,得分 50 分。 机器人接收指令,语音应答并重复指令,并开始执行。得分 50 分。(50) 机器人自主走到厨房。服务机器人进入厨房门即可得 200 分,期间有一次碰 撞扣 10 分。(200) 厨房内红、黄、蓝三个不同颜色的盘子前有白色标记线。 从厨房门口走到指定的盘子前停下,并语音提示。得分 100 分。根据停下的 位置及停下的角度确定分值多少,如果停下的位置不对,则为 0 分。(100) 机械手臂抓取盘子。抓取到盘子得分 100 分,期间碰到桌面或其它盘子扣 50 分。(100) 带着盘子返回老人身边,并将机械手中的盘子面向老人。完成任务得分 300 分。盘子中放有 1/3 爆米花,返回过程中有爆米花掉落扣 50 分,又一次碰撞扣 除 10 分,不倒扣分数。(300) 老人拿走盘子,服务机器人机械手复位并语音提示完成任务,比赛结束。语 音提示成功得 50 分。(100) 比赛限时为 5 分钟完成,5 分钟内完成加 50 分。5 分钟内没有完成,可继续 完成比赛每延长 20 秒倒扣 20 分。但不得超过 10 分钟,超过 10 分钟则终止比赛, 按照当前分数记。超时后选手可选择继续比赛或终止比赛。(100) 裁判要求: 判断机器人是否接收到子女发送的指令。 判断子女发出的指令是否正确。 判断服务机器人自主工作效果,机器人走的是否直,是否是最佳路径,是否 有反复,是否有碰撞。 监督是否有遥控。如有取消比赛资格,并判 0 分。 判断机器人是否到达指定的盘子前,在盘子前的角度是否正对。 判断机械手臂是否拿起盘子,判断机械手臂是否碰撞其它物品。 判断机器人行走是否平稳,是否是最佳路径,是否掉下爆米花,是否有碰撞, 到达老人身边是否正对老人。 判断老人是否拿走盘子后机器人才开始语音。 设定比赛时间为 5 分钟,2 分钟后每 20 秒提示一次,并计算分数。
2013中国机器人大赛FIRA小型组(3vs3)比赛规则

附录一 MiroSot 3vs3 比赛规则规则1:场地和球(a)场地尺寸赛场为黑色(不反光的)木质长方形场地,其尺寸是150cm×130cm,带有5cm 高,2.5cm厚的围墙。
围墙的侧面为白色,围墙顶部为黑色。
在场地的四角固定四个7cm×7cm 的等腰三角形以避免球进入角落。
木板表面的材质与乒乓球台相同。
(b)场地标记(附录1)比赛场地标记如附录1 所示。
中圈半径是20cm。
作为门区的一部分的圆弧沿球门线长20cm,垂直于球门线5cm。
主要直线/圆弧(中线、门区边界线和中圈)均为白色,3mm 宽。
争球(规则13)时机器人的站位(圆)标记为灰色。
(c)球门球门宽40cm,没有横梁和网。
(d)门线和门区门线是恰好位于球门前长40cm 的直线。
门区包括位于球门前尺寸为70cm×15cm 的长方形区域以及附属的弧形区域,弧形区域平行于球门线长度为20cm,垂直于球门线高度为5cm。
(e)球用桔黄色的高尔夫球作比赛用球,直径42.7mm,重46g。
(f)球场位置场地位于室内。
(g)照明条件比赛现场照明条件固定在1000 lux 左右。
规则2:选手(a)总体系统(附录2)比赛将在二个队之间进行,每队包括3 名机器人。
其中之一为守门员(规则2.b.2)。
球队由三个人组成,分别是领队,教练和训练员,他们只允许留在看台上。
每队可使用一台主计算机,主要用于视觉信息处理和位置确定。
(b)机器人(1) 每个机器人的尺寸被限定为7.5cm×7.5cm×7.5cm,在确定机器人尺寸时不考虑通讯天线的高度。
(I) 机器人的顶部不得涂桔黄色。
由赛事组织者所分配的蓝色或黄色色标将用于标识机器人队别。
所有机器人必须至少有一个3.5cm×3.5cm 的区域用于贴蓝色或黄色的队标,队标在其顶部清晰可见。
一支球队的队标可能每场比赛都改变,队标贴片应是可拆开的。
一旦分派了蓝色和黄色中的一个作为队标,机器人不得使用任何对方球队所用颜色的贴片。
2013中国机器人大赛机器人武术擂台赛比赛规则

机器人武术擂台赛项目竞赛规程(2013)1 总则1.1竞赛目的本项赛事的目的在于促进智能机器人技术的普及。
参赛队需要在规则范围内以各自组装或者自制的自主机器人互相格斗,并争取在比赛中获胜,以对抗性竞技的形式来推动机器人技术在大学生、青少年中的普及与发展。
本项赛事未来的发展目标是两方面:1)较高技术难度:要求两组使用双腿自主行走的仿人形机器人互相格斗,将对方打倒或者打下擂台。
2)较强的观赏性和对抗性:较大尺寸、不限定形态、具备攻击装置的机器人的遥控或自主性对抗。
1.2 竞赛内容概述在指定的擂台上有双方机器人。
双方机器人模拟中国传统擂台格斗的规则,互相击打或者推挤。
如果一方机器人整体离开擂台区域或者不能再继续行动或被对方机器人打倒,则另一方获胜。
本规则的原则是规定参赛队不能做的方面,即本规则没有明确禁止的做法均是允许的,除非技术委员会认为该事项可能危害人身安全和比赛过程的安全及公正。
对于由本规则未能描述到的盲区或疑问点导致的争议,在比赛现场应服从主裁判裁决,赛后可由参赛队申请仲裁或解释,由技术委员会合议后进行书面的解释判定,并正式列入规则中。
1.3 竞赛组别机器人武术擂台赛分为以下十个组别,其中包含不限定比赛平台和限定标准平台的竞赛。
如任何参赛队对自身或其他队伍是否具备参加该组别的资格有争议,应在赛前以书面方式提交技术委员会讨论裁定。
不限定平台赛种:●1) 无差别组(1VS1)⏹不限制参赛机器人结构形式,可以采用轮式、履带式、足式移动。
●2) 仿人组(1VS1)⏹参赛机器人必须具备几个明显的仿人类特征,见本规则2.2节。
●3) 技术挑战赛(1规定动作挑战;2动作投影技术挑战;3 自主命题技术挑战)⏹技术挑战赛的内容原则上是未来将引入正式比赛的内容,也是本赛事规则发展的风向标。
标准平台赛种:●4) 无差别组标准平台(1VS1和2VS2)⏹每个参赛机器人的任何部分(除电池外)都只能使用同一厂家提供的机器人套件中的部件完成,结构件只能使用塑料部件,例如创意之星和乐高套件等。
RoboCup中型组机器人比赛规则(MSLR)

RoboCup中型组机器人比赛规则(MSLR)陈卫东叶道年张小冰等编译上海交通大学自动化研究所目录第一章 RoboCup比赛项目 (3)1.1国际规则项目 (3)1.22Vs2项目 (3)第二章 RoboCup国际规则 (4)●规则1 -比赛场地要求 (4)——规则1.1 尺寸 (4)——规则1.2 场地标识 (5)——规则1.3 球门区 (5)——规则1.4 罚球区 (5)——规则1.5 旗杆 (6)——规则1.6 角弧 (6)——规则1.7 球门 (6)——规则1.8 安全 (7)●规则2 -比赛所用球 (8)——规则2.1 质量和尺寸 (8)——规则2.2 受损球的替换 (8)●规则3 -比赛队员装备 (9)——规则3.1 安全性 (9)——规则3.2 基本装备 (9)——规则3.3 守门员 (11)——规则3.4 犯规和制裁 (11)——规则3.5 重新比赛 (11)●规则4 -裁判及助理裁判 (12)——规则4.1 裁判之权威 (12)——规则4.2 权力与职责 (12)——规则4.3 助理裁判 (12)——规则4.4 裁判判决 (12)●规则5 -比赛时间 (13)——规则5.1 半场 (13)——规则5.1 中场休息 (13)——规则5.2 补时 (13)——规则5.3 罚球 (13)——规则5.3 加时 (13)——规则5.4 中途终止之比赛 (13)●规则6 -比赛开始与重新开始 (14)——规则6.1 开球 (14)——规则6.2 开球过程 (14)——规则6.3 开球的犯规及措施 (14)●规则7 -比赛的进行与暂停 (15)——规则7.1球赛暂停 (15)——规则7.2 球赛进行 (15)●规则8 -比赛的计分 (16)——规则8.1 进球得分 (16)——规则8.2 比赛胜利 (16)——规则8.3 竞赛规则 (16)●规则9 -犯规行为 (17)——规则9.1 停球与持球 (17)——规则9.2 踢球与运球 (17)——规则9.3 犯规及其犯规后的处罚 (18)●规则10 -任意球与罚球点及点球 (20)——规则 10.1 任意球 (20)——规则10.2 任意球的位置 (20)——规则10.3 任意球犯规/制裁 (20)——规则10.4 罚球 (21)——规则10.5 球出边界的处理 (22)——规则10.6 球门发球 (22)●规则11- 上场队员的人数 (23)第三章 RoboCup 2Vs2项目规则 (24)3.1 2Vs2比赛基本规则 (24)3.2 2Vs2比赛其它规则 (24)第一章RoboCup比赛项目RoboCup的原意为机器人世界杯(Robot World Cup)。
仿人机器人竞速比赛规则
2013中国机器人大赛暨RoboCup公开赛仿人机器人竞速比赛规则2013-6-1竞赛联系人:空军勤务学院李汉军公共邮箱(技术讨论、资料下载):fangrenjingsu@,密码123456fr比赛简介比赛目的参赛队员设计制作一个小型仿人机器人,模仿体育场上运动员的中短距离赛跑。
机器人从起跑线出发,在类似体育场的环形赛道上,限定双足直立行走方式快速行进一圈到达终点线。
比赛成绩取决于机器人的行进速度,完成比赛所用时间越短,则比赛成绩越好。
比赛项目及任务项目仿人机器人竞速比赛一、比赛分组1.标准赛2.障碍赛3.创意赛4.青少年组二、比赛任务1.标准赛和青少年组:在标准赛场地上,机器人从起跑线出发,沿环形赛道中线,通过双足直立行走方式行进一圈到达终点线。
行进过程中,机器人倒地,在没有出界的情况下,可重新爬起来继续进行比赛。
2.障碍赛:在标准赛场地上放置三个长500mm、高20mm、厚8mm、颜色为黑色的跨栏构成障碍赛场地,跨栏的摆放位置距起跑线(沿赛道中线计算)1210mm、3030mm、6060mm处。
机器人从起跑线出发,沿环形赛道中线,通过双足直立行走方式行进一圈到达终点线。
遇到栏架时,机器人以不低于栏高的抬腿高度跨过栏架。
跨栏过程中,机器人前脚跨过跨栏后再碰倒栏架不算犯规。
行进过程中,机器人倒地,在没有出界的情况下,可重新爬起来继续进行比赛。
3.创意赛:以小型仿人机器人竞速比赛为主题展开,是标准赛和障碍赛的扩展和延伸。
在标准赛场地上,参赛队可充分利用场地,在不破坏场地的前提下,机器人进行创新创意演示。
参赛队可添加一定的辅助器件。
比赛规则规则一比赛场地场地为长方形,其长×宽为3660mm×2440mm。
赛道为环形(如图),由2条直线和2个半圆构成,赛道中线长为7278 mm。
场地制作使用2440×1220×18mm的白色实木颗粒板。
赛道中线和边线(内边线或外边线)使用16mm宽黑色防水电工绝缘胶带。
2013中国机器人大赛微软(MS)机器人仿真比赛规则

微软(MS)机器人仿真比赛类别1.微软(MS)机器人武术擂台赛2.微软(MS)Nao类人仿真赛3.微软(MS)3D类人仿真赛4.微软(MS)轮式微型机器人5:5仿真赛5.微软(MS)轮式微型机器人11:11仿真赛微软(MS)机器人武术擂台赛仿真赛规则1.平台下载比赛采用微软公司发布的Microsoft Robotic Studio作为仿真平台,最新平台组件及下载地址在:/showsoft.asp?id=572.比赛模式比赛采用1对1的循环竞赛模式,每队一台机器人,比赛过程中人不能干预,也不可更换决策。
一场比赛共10局,每局比赛时间为40秒,获胜局数多的一方获胜,若获胜局数持平,则平局。
获胜者得分5分,平局3分,失败方得1分,最后按得分计算排名。
获胜条件3.(1)比赛过程中,若一方倒地(上身与擂台接触)、或掉下擂台(机器人与台下地面接触),则计时5秒,5秒内,若另一方未出现以上两种情况,则另一方获胜,否则,记为平局。
(2)若时间到,双方都未倒地或掉下擂台。
此时离擂台中心近的一方获胜。
(3)双方机器人都无法行动时,正常比赛,参照(2)。
4.比赛环境及进程本次比赛的仿真环境还在测试中,比赛竞赛双方及裁判采用同一台仿真机器(单机比赛)。
在比赛开始之前,竞赛双方加载决策代码。
由裁判控制比赛开始。
在比赛期间,竞赛双方都不得修改决策程序,或更换决策。
比赛场地5.(1)比赛场地(即擂台)大小为长2480mm,宽2480mm,高200mm,底色为灰黑色80%的灰度,中心区域为擂主区域,正红色。
(2)场地质量为300kg。
场地材质为黑色木质,外场材质为地板(3)场地的照明采用与其他微软仿真平台相同的自然光照明。
(4)场地示意图。
见下图。
图1 场地示意图微软(MS)Nao类人仿真规则1.仿真环境比赛采用微软公司发布的Microsoft Robotic Studio作为仿真平台,以Aldebaran公司的Nao机器人作为仿真模型。
Robocup标准平台组规则书(汉语版)

RoboCup 标准平台组(Nao)规则书1. 环境设置1.1 场地结构7.4×5.4的地毯1.2 边线线宽50mm,中心圆外直径1250mm掷界外球线(没有画出)位于场内,平行于边线,距侧边线400mm,长4m,中线平分此线1.3 场地颜色地毯颜色绿色最佳,也可以是其他明亮色线色为白红队防守黄色球门,蓝队防御天蓝色球门球门为黄色或天蓝色,球门三角支架和球网为白色1.4 照明设设根据场地的具体情况,一般屋顶灯即可1.5 球直径65mm,重55g,见下面网址:/Mylec-Weather-Bounce-Hockey-Orange/ dp/B002LBDA30/ref=sr_1_18?ie=UTF8\&s=sporting-goods\&qid= 1259775748\&sr=8-18/mylec-orange-warm-weather-ball.html2 机器人2.1 硬件不允许对机器人做任何硬件上的改动,以下情况除外:添加举办方提供的腰带大腿部添加赞助商或球队的黑白色标志,白色标志面积要超过一半用胶,白色胶带,或是透明胶带固定腕关节用透明或白色胶带保护各种商标文字使用备用存储卡替换厂商提供的存储卡另:比赛时用的电脑由举办方提供2.2 守门员只允许守门员在本方禁区内,只允许守门员在禁区内用手或胳膊接触球,守门员标号为12.3 场上队员不允许进入己方禁区,标号依次为2,3,42.4 球队标记球队标记为官方标准的蓝色和粉红的腰带,以区分彼此2.5 交流比赛时机器人在无人控制的状态下,只允许场地上的机器人之间和机器人与GameController之间的交流2.5.1 语音交流机器人之间的语音交流无限制,可以使用麦克风或扬声器2.5.2 无线通讯只允许机器人内嵌网卡和举办方提供的接入点之间通信,接入点受SSID和WEP保护违反规定者取消参赛资格,所有器人的MAC地址经过注册后才能参赛,其中的两个接入点连接各自运行GameController 的PC,另一个接入点在双方练习使用,团队自带网线,参赛者会分配到一个IP地址块,用于计算机和机器人之间的通信,具体信息会在比赛场点公布,参赛方使用上限500Kbps的贷款,包括数据和协议传输。
2013中型组规则修改变化情况汇总(61版)
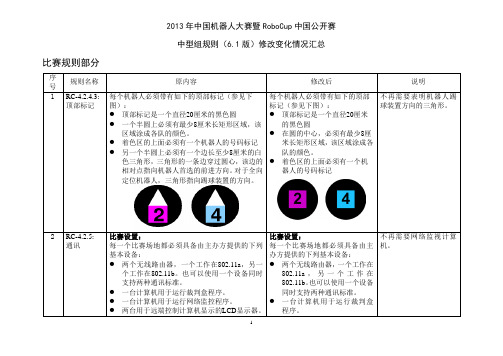
根据国际 比赛对规 则的解释, 增加了相 关要求。
对参加中 国机器人 大赛中型 组比赛的 成绩认定 时间进行 说明。
-7-
7 赛事规则
以上 pdf 文档,请上传至竞赛委员会官方论坛的“RoboCup
只要有一小部分在己方半场,就不算机 关要求。
器人完全进入对方半场(这条规则防范
的主要情况是:给出 start 信号以后,球
没有动的情况下,开球方的一个机器人
进入对方半场,会产生遮挡防守方机器
人视线的情况)。
-6-
5 赛事规则 新增 1.1 23、对推 动的补充 规定
6 赛事规则 新增 2.2 2、过去 3 年内的参 赛、获奖格的要求,规定在拼抢过程中,双方 只能各有一个机器人触球,不允许任何 一方有第二个机器人触球。还规定防守 时,防守方除了一个与球有接触的机器 人可以触碰进攻方机器人以外,不允许 第二个机器人接触进攻方机器人。否则 视为犯规,判给进攻方任意球(这条规 则防范的主要情况是:防守方多个机器 人同时围堵进攻方一个机器人)。
中线开球自主走位(3 分)
射门(4 分);
按规则完成开球、罚球动作(5 分)。
圆的半径。机器人必须完全位于这 的详细定义。
个圆以外。
裁判必须在比赛停止后的10秒之
内重新开始比赛。
-3-
5 RC-13.4.1: 如果10秒钟以后进攻方没有开出球,防守方可 如果10秒钟以后进攻方没有 在 RC-13.4.1、RC-15.1、
任意球的过
以触球并且直接射门得分。但是即使10秒钟过
RoboCup概述

Omnidirectional Camera
Vision system of Nubot
Vision system of UP-VoyagerIII
颜色空间
■ RGB是最常用最直观的颜色空间,使用红(Red)绿(Green)蓝(Blue)三个颜 色分量来描述颜色
颜色空间
■ YUV,视频处理中常见的颜色格式,Y为亮度分量,UV为色差分量.
V Y
U
V
U
Y
颜色空间
■ HSI又称HSB或HSV,是从人的视觉系统出发,用色调(Hue),色饱和 度(Saturation或Chroma)和亮度(Intensity或Brightness)来描述色彩.
Hue Scale
HSI颜色空间转换
在实现的时候为了提高运算速度,将公式优化为: S = MAX-MIN
简单视觉行为
x作为输入 作为输入 y作为输入 作为输入
PID
PID
输出
输出
运动的目标位置
x Speed_x Speed_y
y
叠加
Speed_y+Speed_x 左电机速度
Speed_y-Speed_x 右电机速度
机器人本体
RoboCup MSL的射球机构 的射球机构
推射( 推射(Place Shot) )
精彩视频
RoboCup 2006 Bremen MSL Finals
RoboCup 2007 Atlanta MSL Finals
THE END
谢谢!
�
中型组比赛场地
2007年ROBOCUP China Open场地为18米×12米
RoboCup 2007 Atlanta
RoboCup MSL的机器人平台 的机器人平台
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Technical Challenges for the RoboCup2013Standard Platform League CompetitionRoboCup SPL Technical CommitteeMarch29,20131IntroductionThere are three technical challenges that will be held at the RoboCup2013Standard Platform League Competition.These are:•The Open Challenge(Section2)•The Passing Challenge(Section3)•The Drop-In Player Challenge(Section4)The team with the top score in a challenge will receive25points,each position thereafter will receive1less point;i.e.1st=25pts,2nd=24pts,3rd=23pts...25th= 1pts.In the case of a draw,each team will receive the average of the points allocated to these positions;e.g.if three teams tie for2nd,they will receive(24+23+22)/3=23 points.Teams not competing in a challenge will receive0points.If a team competes in a challenge,but fails to score a point(or receive a vote),they will also receive0 points.The team with the highest total score after all challenges is deemed the overall challenge winner.All challenges will use the2013field and the2013rules will apply.Each challenge will be performed in a two hour time slot,where the time slots of each challenge will not overlap.2The Open ChallengeThis challenge is designed to encourage creativity within the Standard Platform League, allowing teams to demonstrate interesting research in thefield of autonomous systems. Each team will be given three minutes of time on the RoboCupfield to demonstrate their research.Each team that wishes to compete in this challenge must send a short,one page document describing their demonstration to the technical committee by May27,2013. Teams who do not submit this description by the deadline will not be allowed to com-pete in this challenge.These descriptions will be posted on the website before the competition.1The winner will be decided by a vote among all the SPL teams.In particular:•The demonstration should be strongly related to the scope of the league.Ir-relevant demonstrations,such as dancing and debugging tool presentations,are discouraged.•Each team may use any number of Aldebaran NAO robots.Teams must arrange for their own robots.•Teams have three minutes to demonstrate their research.At most one additional minute may be used for initial setup.Any demonstration deemed likely to require excessive time may be disallowed by the technical committee.•Teams may use extra objects on thefield as part of their demonstration.Robots other than the NAOs may not be used.•The demonstration must not mark or damage thefield.Any demonstration deemed likely to mark or damage thefield may be disallowed by the technical committee.•The demonstration may not modify the NAO robots.•The demonstration may use off-board sensors or actuators,as long as the NAO is still the focus of the challenge.This is the only challenge in which off-board sensors or actuators are allowed.•The demonstration may use off-board computing power connected over the wire-less LAN.This is the only challenge in which off-board computation is allowed.•The demonstration may use off-board human-computer interfaces.This is the only challenge in which off-board interfaces,apart from the Game Controller, are allowed.The winner will be decided by a vote among the SPL teams using a Borda count (/wiki/Borda_count).Each SPL team will vote for their top10teams in order(excluding themselves).Teams are encouraged to eval-uate the performance based on the following criteria:technical strength,novelty,ex-pected impact and relevance to RoboCup.At a time decided by the designated ref-eree,within one hour of the last demonstration if not otherwise specified,the captain of each team will submit his or her team’s rankings byfilling out an online form at http://goo.gl/vIVTr.Any points awarded by a team to itself will be disre-garded.The points awarded by the teams will be summed,and the team with the highest total score shall be the winner.3The Passing ChallengeThis challenge is intended to encourage teams to develop passing skills.In this chal-lenge,each team will be required to provide three robots,all robots must be in the same2colored uniform(the decision on the color of the uniforms can be made by each team). Each robot will placed on thefield inside a circle of radius35cm(Figure1).The center of the circles will be no closer then80cm and no further then250cm apart.The triangle formed by the circles will not be equilateral,i.e.the distances between robots will be different.The circles may be marked with a felt-tip marker(such that they are invisible to the robots)or with white tape(such that they may be visible to the robots).Figure1:An example placement of the robots for the passing challenge.The location of the circles will be made available on the morning of the challenge. It will be the responsibility of each team to make sure they have set the correct points.Ten minutes before the challenge is scheduled to start,participating teams must provide the three robots participating in the challenge to the Technical Committee (switched off).Before the challenge,each robot will be booted and put into the penalized state. The GameController will configure the robots to team color blue.Once each robot has been placed inside a circle,they will be placed into the‘set’state for15seconds. The robots will then be placed into‘playing’and given three minutes to pass the ball around.A pass will be regarded as successful when:•The passing robot kicks the ball from inside its circle and•the catching robot stops/controls the ball inside its circle.Stops/control will be left to the referee’s discretion.Examples are:–The ball comes to a complete stop.–The robot is capable of kicking the ball from one circle to another withoutthe need for stopping the ball.A pass will be deemed partially successful if:•The passing robot kicks the ball from inside its circle and3•the catching robot touches the ball inside the circle but the ball then travels out-side the circle.A pass is deemed unsuccessful if:•Either robot makes contact with the ball when the ball is outside a circle or•the ball exits thefield.A robot is deemed to be inside a circle if part of one foot is inside the circle.The ball is inside the circle if some part of the ball is inside the circle.The line is regarded as inside the circle.Robots may pass the ball between each other in any order,but will be rewarded for passing to a different robot then that which passed to it.Scoring of the challenge will be as follows:•3pts For a successful non‘return’pass that directly follows a successful pass reception.•1pt For a successful pass.•0.5pt For a partially successful pass.For example,if robot2starts with the ball and successfully passes to robot3,one point will be awarded.Then if robot3successfully passes to robot1,three points will be awarded.If robot1then successfully passes back to robot3,one point will be awarded.If robot3then successfully passes to robot2,three points will be awarded.If robot2then has a partially successful pass to robot1,0.5points will be awarded.Then if robot1brings the ball back to its circle and then successfully passes to robot3,one point will be awarded(if robot1had passed the ball before taking it back to its circle, no points would be awarded).All normal game rules apply in the challenge,except:•if the ball leaves thefield,it will be replaced back in the closest circle•game stuck will not be calledIf a rule is violated then any pass resulting from this violation will receive no points, and the pass itself will be considered unsuccessful.4The Drop-In Player ChallengeThe main point of this challenge is for teams to develop‘drop-in’players that can be good teammates and play well with a team composed of drop-in players from a variety of teams.Each participating team will contribute one drop-in player.Each drop-in player will compete in5minute games with at least three different teams composed of randomly chosen drop-in players.In each game,the opponent will also be a team composed of4randomly selected drop-in players.The exact number of games played by each drop-in player will depend on the number of teams that participate in the challenge.So that we can randomly draw teams and organize this challenge,each team that wishes to compete in this challenge must send a statement regarding their intent to participate in this challenge to the technical committee by May27,2013.Teams who do not submit an intent to participate by this deadline will not be allowed to compete in this challenge.All normal game rules apply in this challenge.The only exception will be:•Any player may be goalie(ie,enter the goal box and behave as goalie).However, once one player has become goalie for a team,this player will be the goalie for the remainder of the game.Any subsequent defensive players to enter the goal box will be removed as illegal defenders.Each drop-in player may communicate with its teammates using a simple protocol. However,drop-in players are not required to utilize this protocol.The protocol for the communication packet is presented in pickup.h,available at https://www.tzi. de/spl/pub/Website/Downloads/pickup.h.The challenge will be scored using two metrics:•average goal difference•average human judged scoreThe judges will likely be from other leagues,but teams are still asked to remove or cover any distinguishing markers on their robots for this challenge.For each game, each judge will award each drop-in player a teamwork score ranging from0to10, where10means the drop-in player was an excellent teammate and0means that the drop-in player ignored its teammates.The judges will be instructed to focus on team-work capabilities,rather than individual skills,so that a less-skilled robot could still be given top marks for good teamwork.The human judges will help to identify good team-work abilities in agents to ameliorate the problems of random variance in the games and the quality of teammates affecting the goal differences.The two metrics will be normalized when determining the overall winner of this challenge.The normalization factor will be computed to be10best average goal difference of a drop-in playerEach drop-in player’s average goal difference will then be multiplied by this normal-ization factor,to get each drop-in player’s normalized average goal difference.The normalized average goal difference will be added to the average human judged score for each drop-in player to obtain its overall score.Each participating team should plan for at least one team member to attend the challenge.This team member will need to update the team color and player number of their team’s drop-in player between games,and potentially help referee some of the games.5。