电力系统分析-同步电机的数学模型1
同步发电机建模

研究先进的控制策略和优化算法,以提高同步发电机的运行效率和稳定性。例如,采用滑模控制、自适应控制和强化学习等算法,实现发电机的快速响应、稳定运行和智能控制。
并网与分布式发电系统
研究同步发电机在并网和分布式发电系统中的应用,实现与可再生能源的高效集成。探讨分布式发电系统中的协同控制策略,以及在微电网和智能电网中发挥同步发电机的关键作用。
多物理场耦合建模
深入研究同步发电机的多物理场耦合建模,包括电气、机械、热和流体等多个方面。通过建立精确的数学模型,模拟发电机的动态行为和相互作用,为优化设计和控制提供理论支持。
同步发电机研究展望
THANKS
容量匹配
根据电力系统的需求和规模,合理配置同步发电机的容量,以满足电力系统的供电需求。
布局优化
根据电力系统的地理分布和负荷分布,优化同步发电机的布局,以提高电力系统的运行效率和可靠性。
技术升级
对老旧的同步发电机进行技术升级和改造,提高其运行效率和性能,降低对环境的影响。
在电力系统中的优化配置
延时符
Байду номын сангаас
励磁控制策略
总结词
并网控制是同步发电机并入电网的关键环节,需要确保发电机的频率、相位和电压幅值与电网一致。
详细描述
并网控制策略通过调节发电机的转速和励磁电流,使发电机的输出频率和相位与电网一致。在并网过程中,通常采用准同期并网方法,通过调节发电机的频率和相位来实现与电网的同步。
并网控制策略
VS
无功功率控制是同步发电机中用于平衡无功功率和维持电网电压稳定的重要手段。
稳态方程
02
稳态模型的核心是建立同步发电机的电压、电流和功率平衡方程。这些方程通常包括电机的电压方程、磁链方程、功率方程等,用于计算发电机的运行参数。
电力系统分析第6章
第六章 同步电机的数学模型
第六章 同步电机的数学模型
三、绕组的电压和磁链方程
一、电势方程和磁链方程
ua u b uc u f 0 0 0 Ra 0 0 0 0 0 0 0 Ra 0 0 0 0 0 0 0 Ra 0 0 0 0 0 0 0 Rf 0 0 0 0 0 0 0 RD 0 0 0 0 0 0 0 Rg 0 0 ia a 0 ib b 0 ic c d 0 i f f dt i 0 D D 0 i g g RQ i Q Q
第六章 同步电机的数学模型
第六章
同步电机的数学模型
之前的研究:电力系统稳态分析,主要内容:潮流分布计算 和电力系统稳态调整(电压、频率、有功、无功、运行方式 优化)。 此章之后的内容:电力系统暂态分析,主要内容:故障分析、 稳定性分析。 暂态过程:发电机机械暂态和电磁暂态过程相互作用,直接 影响发电机自身的运行状态,进一步影响到电力系统的暂态 行为,又反过来影响发电机的运行。
[ i a sin ib sin ( 1 2 0 ) i c sin ( 1 2 0 )]
第六章 同步电机的数学模型
二、d,q,0系统的电势方程和磁链方程 1)电势方程 应用派克变换对abc坐标中的所有电量进行变换,可得:
u d d q R a id u q q d R a iq u R i 0 0 a 0
D*
}
• 常用的转子运动方程式
第六章 同步电机的数学模型
第二节 abc坐标系统下的同步电机方程
同步电机数学模型
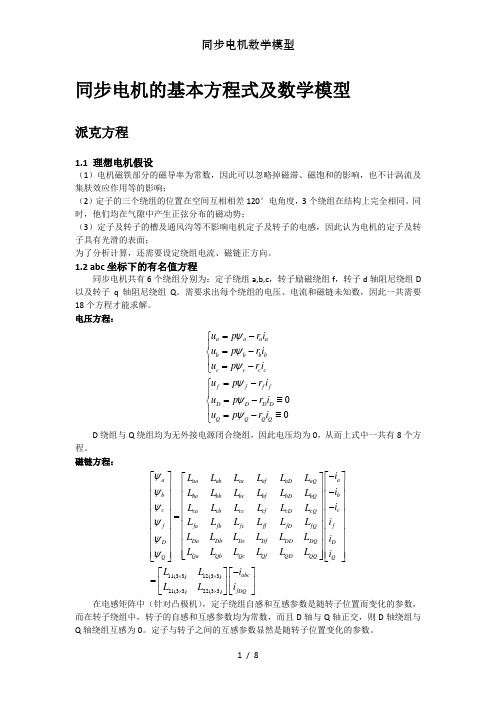
同步电机的基本方程式及数学模型派克方程1.1 理想电机假设(1)电机磁铁部分的磁导率为常数,因此可以忽略掉磁滞、磁饱和的影响,也不计涡流及集肤效应作用等的影响;(2)定子的三个绕组的位置在空间互相相差120°电角度,3个绕组在结构上完全相同。
同时,他们均在气隙中产生正弦分布的磁动势;(3)定子及转子的槽及通风沟等不影响电机定子及转子的电感,因此认为电机的定子及转子具有光滑的表面;为了分析计算,还需要设定绕组电流、磁链正方向。
1.2 abc 坐标下的有名值方程同步电机共有6个绕组分别为:定子绕组a,b,c ,转子励磁绕组f ,转子d 轴阻尼绕组D 以及转子q 轴阻尼绕组Q 。
需要求出每个绕组的电压、电流和磁链未知数,因此一共需要18个方程才能求解。
电压方程:00a a a ab b b b cc c c f f f f D D D D QQ Q Q u p r i u p r i u p r iu p r i u p r i u p r i ψψψψψψ=-⎧⎪=-⎨⎪=-⎩=-⎧⎪=-≡⎨⎪=-≡⎩D 绕组与Q 绕组均为无外接电源闭合绕组,因此电压均为0,从而上式中一共有8个方程。
磁链方程:11a a aa ab ac af aD aQ b b ba bb bc bf bD bQ c c ca cb cc cf cD cQ f f fa fb fc ff fD fQ Da Db Dc Df DD DQ D D Qa Qb Qc Qf QDQQ Q Q i L L L L L L i L L L L L L i L L L L L L i L L L L L L L L L L L L i L L L L L L i L ψψψψψψ-⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦=(33)12(33)21(33)22(33)abc fDQ i L L L i ⨯⨯⨯⨯-⎡⎤⎡⎤⎢⎥⎢⎥⎣⎦⎣⎦在电感矩阵中(针对凸极机),定子绕组自感和互感参数是随转子位置而变化的参数,而在转子绕组中,转子的自感和互感参数均为常数,而且D 轴与Q 轴正交,则D 轴绕组与Q 轴绕组互感为0。
华中科技大学电气学院_现代电力系统分析
u dq 0 Pu abc i Pi abc dq 0 ψ Pψ abc dq 0
u abc P 1u dq 0 1 i abc P i dq 0 1 ψ P ψ dq 0 abc
对同步电机定子电压方程和定子绕组磁 链方程进行Park变换,得到dq0坐标系 的同步电机方程式
Park变换:正交矩阵变换
P cos cos( 2 3) cos( 2 3) 2 sin sin( 2 3) sin( 2 3) 3 2 2 2 2 2 2
定转子绕组间电感系数出现不互易的情 况,与所选取的Park变换矩阵有关;采 用正交变换矩阵可避免此现象。
iDB , LDB Z DB B , DB uDB B LDB iDB igB , LgB Z gB B , gB u gB B LgB igB iQB , LQB Z QB B , QB uQB B LQB iQB
3 S B uB iB u fB i fB uDB iDB u gB igB uQB iQB 2
式(1-8):Park变换矩阵
cos 2 P sin 3 12 cos( 2 3) sin( 2 3) sin( 2 3) 12 12 cos( 2 3)
式(1-10):反Park变换矩阵
cos sin 1 P cos( 2 3) sin( 2 3) 1 cos( 2 3) sin( 2 3) 1
标幺方程中,定转子绕组间电感系数互易;
转子电压电流基准值任选其一,根据容量
基准确定另一个,有多种选法;
2.同步电机标幺化方程(不同基准值选取)
电力系统分析第四章(1)
M ab Lbb M cb M fb M Db M gb M Qb
M ac M bc Lcc M fc M Dc M gc M Qc
M af M bf M cf Lff M Df M gf M Qf
M aD M bD M cD M fD LDD M gD M QD
M ag M bg M cg M fg M Dg Lgg M Qg
Rf
d
y D
g α
c
Q
a
ω
D
o
ffLeabharlann Dxcb
q
g Q
D
b
z
ia
2)定子三相绕组磁轴的正方向与其正向电流所产 生磁通的方向(按右手法则)相反;转子各绕组 磁轴的正方向,与其正向电流所产生磁通的方向 (按右手法则)相同。 3)定子和转子各绕组磁链的正方向与其磁轴的正 方向相同, 各绕组由磁链变化所产生的感应电动势服从楞次 定律。
M ba = ψ ba (−ia )
= −λmσ ws2 + λad ws2 cos α cos(α − 2π 3) + λaq ws2 sin α sin(α − 2π 3) = −[m0 + m2 cos 2(α + π 6)]
对于隐极同步机有λad= λaq ,所以其定子绕组的 互感系数为常数。
目前广泛使用的同步电机数学模型是在理想同步电机假设条件下建立起来的, 1) 线性磁路假设 线性磁路假设:忽略同步电机的磁路饱和效应,认为电机铁芯的导磁系 数为常数。 2) 转子对称假设 转子对称假设:同步电机转子对自身的纵向d轴和横向q轴结构对称。 3) 定子对称假设 定子对称假设:同步电机定子a、b、c三相绕组结构对称,它们的磁轴在 空间位置上依次相差2π/3(rad)电角度。 4) 气隙磁动势正弦分布假定 气隙磁动势正弦分布假定:同步电机定子电流产生的磁动势在其气隙中 按正弦分布。反之,同步电机空载,转子恒速旋转时,转子绕组的磁动势 在定子绕组感应产生的空载电动势是时间的正弦函数。 5) 定子及转子光滑表面假设 定子及转子光滑表面假设:该假设相当于认为定子及转子的槽和通风沟 不影响定子及转子绕组的电感。 符合上述条件的电机称作理想同步电机。
张晓辉电力系统分析第六章
转子旋转动能
2WK d M 2 0 dt
S N M N 0
2WK d / 0 M SN dt MN TJ 2WK SN TJ d / 0 M dt MN
2WK d M 2 M N 0 dt M N
同步电机的转子机械惯性时间常数,简称惯性时间常数。
用转速表示的转子运动方程式
若只考虑转速变化对阻尼的影响:
d * P P d * 1 TJ * * m* e* D* 1 dt* * dt* d* Pm* Pe* d TJ D* 1 0 * 1 d t dt *
同一系统中,所有发电机的转子相对角度必须用同一个同步 旋转坐标轴作为参考。
对于隐极机, l2 m2 0 2. 定子绕组与转子绕组之间的互感 定子与转子绕组间互磁通路径的磁阻周期性变化,应考虑转 子绕组的极性,即转子旋转一周磁路才重复一次。 定子绕组与励磁绕组之间的互感
M af M fa maf cos M bf M fb maf cos 2 / 3 M cf M fc maf cos 2 / 3
第六章 同步电机的数学模型
稳态—电力系统相对稳定的运行状态 暂态 — 电力系统受到扰动后,从一种稳态向另一种新的稳态的过渡过程。 (1)负荷变化;(2)设备故障;(3)短路故障。 从同步发电机入手进行暂态过程研究。 同步发电机的作用是将原动机的旋转机械能转换为同步发电机定子输出 的电能。 稳态分析中,重点在确定系统中的潮流分布,而并不十分关心同步发电 机的内部物理过程,因此主要涉及到发电机的定子电压、电流、有功功率 和无功功率以及励磁绕组的电流。 暂态过程中,不但发电机的转速将随时间变化,而且在发电机内部将产 生一系列复杂的机械和电磁过程。
同步发电机的基本方程
VS
详细描述
同步发电机的电压方程是描述发电机端电 压与内部电势、电流和阻抗之间关系的数 学表达式。这个方程通常采用三相坐标系 或同步坐标系来表示。在三相坐标系中, 电压方程可以表示为三个一阶微分方程, 而在同步坐标系中,电压方程可以简化为 一个二阶微分方程。
同步发电机的电流方程
总结词
描述同步发电机内部电流与电压、磁链和阻 抗之间的关系。
工业领域
在工业领域中,同步发电机可用于驱动各种电动 机、压缩机、泵等设备。
交通领域
在交通领域中,同步发电机可用于驱动列车、地 铁、船舶和飞机等交通工具。
02
同步发电机的基本原理
同步发电机的电磁原理
总结词
描述同步发电机如何通过磁场和电流相互作用产生电力的过程。
详细描述
同步发电机的基本原理是利用磁场和电流的相互作用产生电能。在发电机中,磁场由励磁系统产生,而转子上的 导线则会在旋转过程中切割磁力线,从而产生感应电动势。这个电动势的大小与磁场强度、导线切割磁力线的速 度以及导线与磁场的相对角度有关。
详细描述
功率控制的主要目标是确保发电机输出的有功功率和 无功功率满足电网的需求,同时保持电网的稳定运行 。为实现这一目标,功率控制器需要监测电网的有功 功率和无功功率需求,以及发电机的输出功率,通过 调节发电机的励磁电流和气门开度等参数,实现有功 功率和无功功率的解耦控制。常用的功率控制策略包 括恒功率控制、恒压控制和下垂控制等。
详细描述
同步发电机的磁链方程是描述发电机内部磁链与电压、电流和极对数之间关系的数学表 达式。这个方程通常采用三相坐标系或同步坐标系来表示。在三相坐标系中,磁链方程 可以表示为三个一阶微分方程,而在同步坐标系中,磁链方程可以简化为一个二阶微分
第2讲同步发电机数学模型详解
3 2
LaB
LDB
M afB M faB
2 3 LaB L fB
3 2
LaB L fB
M aQB M QaB
2 3
LaB
LQB
3 2
LaB
LQB
转子侧的基准值(第二约束)
关于转子绕组电流基值选取问题:Xad基值系统
用电机参数表示同步电机方程
标准X,从ad而基使值d系轴统、规q定轴了转转子子与绕定组子电绕流组基间值的的互选感取在 标幺值方程中分别等于Xad和Xaq。
ud p d q 0 uq p q d BM df I fB
定子绕组端电压峰值(有名值)
u ud2 uq2 uq BM df I fB X ad IaB
两边同除以 BM afB I fB
BM df I fB B M afB I fB
M df *
X ad IaB
B M afB I fB
M cQ
maQ
sin(
2 3
)
M aD M bD
maD maD
c os c os (
2 3
)
M cD
maD
c os (
2 3
)
转子各绕组的自感和转子绕组间的互感
转子各绕组的自感和转子绕组间的互感 均为常数。由于直轴和交轴的正交,则
M fQ M DQ 0
在abc坐标下基本方程存在的问题
由磁链方程和电压方程组成了以时间t为 自变量的变系数常微分方程,其求解非常困 难。
M qQ* M Qq* X aq*
dq0坐标下标幺制的电压方程
ud*
uq*
ra*
ra*
id*
iq*
d* q*
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ub
ua
Rg ig
RQ iQ
4.1 abc坐标系的同步电机方程
4.1.2 abc坐标系的同步电机方程 1.同步电机绕组的电压和磁链方程
绕组的电压方程
ua Ra 0 0 0 0 0 0 ia a
ub
0ቤተ መጻሕፍቲ ባይዱ
Ra
0
0
0
0
0
ib
b
uufc
Rf
uf
if
Lff
RD
iD
LDD
Ra
Laa
Lbb
Lcc Rc
Lgg Rg ig
LQQ RQ iQ
ia
Rb ib
ic uc
ub
ua
4.1 abc坐标系的同步电机方程
4.1.1 理想同步电机 2.同步电机绕组电流、电压和绕组磁轴的正方向
a
对于水轮发电机等凸极同步电机,阻尼绕组用 于模拟分布在转子上的阻尼条所产生的阻尼作 用;
基于模型统一的考虑,本书首先建立考虑转子 为凸极并具有D、Q、g三个阻尼绕组的同步电 机数学模型,而将转子仅有D和Q阻尼绕组的 凸极机分别处理为它的特殊情况。
d
y D
c
a
Q g
D
o
f
Dx
f
g
b
Q D
c
z
b
q
ia
Rf
Ra
if
Lff
RD
Laa
Lbb
Rb ib
iD
LDD
Lcc Rc
Lgg
LQQ
ic uc
b
M
ba
Lbb
M bc
M bf
M bD
M bg
M
bQ
ib
c f
=
M ca M fa
M cb M fb
Lcc M fc
M cf Lff
M cD M fD
M cg M fg
M cQ M fQ
4.1.1 理想同步电机 1.理想同步电机假设
目前广泛使用的同步电机数学模型是在理想同步电机假设条件下建立起来的,
1) 线性磁路假设:忽略同步电机的磁路饱和效应,认为电机铁芯的导磁系 数为常数。 2) 转子对称假设:同步电机转子对自身的纵向d轴和横向q轴结构对称。 3) 定子对称假设:同步电机定子a、b、c三相绕组结构对称,它们的磁轴在 空间位置上依次相差2π/3(rad)电角度。 4) 气隙磁动势正弦分布假定:同步电机定子电流产生的磁动势在其气隙中 按正弦分布。反之,同步电机空载,转子恒速旋转时,转子绕组的磁动势 在定子绕组感应产生的空载电动势是时间的正弦函数。 5) 定子及转子光滑表面假设:该假设相当于认为定子及转子的槽和通风沟 不影响定子及转子绕组的电感。 符合上述条件的电机称作理想同步电机。
第四章 同步电机的数学 模型
4.1 abc坐标系的同步电机方程
在电力系统暂态过程中,同步电机定子和转子各绕组的电压、电流和磁链都 是随时间变化的。这些变化对机组的机械运动、外部系统的行为和发电机本 身励磁系统的暂态过程都会产生影响。
对电力系统进行暂态过程分析,必须首先建立同步电机各个绕组电压、电流 和磁链之间的方程,即同步电机的数学模型。
iD
LDD
Lcc Rc
Lgg
LQQ
ic uc
ub
ua
各绕组由磁链变化所产生的感应电动势服从楞次
Rg ig
RQ iQ
定律。
4.1 abc坐标系的同步电机方程
4.1.1 理想同步电机 2.同步电机绕组电流、电压和绕组磁轴的正方向
4)转子d轴的正方向与励磁f和阻尼D绕组的磁轴的 正方向相同,规定为转子的N极;转子q轴的正方 向是沿转子旋转方向超前d轴90度,与阻尼g和Q 绕组的磁轴的正方向相同。
对于汽轮发电机等隐极同步电机,阻尼绕组则 用于模拟整块转子铁芯中涡流所产生的阻尼作 用。
在目前应用比较广泛的数学模型中,凸极机一
般在转子的纵轴和横轴上各设置1个等值阻尼
绕组,分别记作D绕组和Q绕组;而对隐极机,
在横轴增加1个等值g绕组,g绕组和Q绕组分
uf
别用于反映阻尼作用较强和较弱的涡流效应。
4.1 abc坐标系的同步电机方程
4.1.1 理想同步电机 2.同步电机绕组电流、电压和绕组磁轴的正方向
a
同步电机正常运行时其转子以角速度ω逆时针方向旋转。 d
图中给出了所采用的定子a、b、c三相绕组,转子励磁f绕 组和阻尼D、g、Q绕组的电流、电压和磁轴的参考正方向
y D
c
1)电压和电流的正方向:定子三相电流正方向为 由同步电机端子流向系统,三相电压正方向为同 步电机端子至中性点的方向;励磁绕组的电流正
g
b
Q D
c
z
b
q
Rf
uf
if
Lff
RD
iD
LDD
Ra
Laa
Lbb
Lcc Rc
Lgg Rg ig
LQQ RQ iQ
ia
Rb ib
ic uc
ub
ua
4.1 abc坐标系的同步电机方程
4.1.2 abc坐标系的同步电机方程
绕组磁链与电流的关系方程
a Laa M ab M ac M af M aD M ag M aQ ia
0
0
0
0
0
0
RQ
iQ
Q
&@d dt
Rb Rc Ra
uabc ufDgQ
RS
0
0 RR
iabc
ifDgQ
ψ&abc ψ&fDgQ
a
d
y
c
D
(4-1)
a
Q g
D
o
f
Dx
f
a
Q g
D
o
f
Dx
f
g
b
Q D
c
z
b
方向为励磁电源流出的方向。
q
2)定子三相绕组磁轴的正方向与其正向电流所产 生磁通的方向(按右手法则)相反;转子各绕组 uf
Rf if
Lff
磁轴的正方向,与其正向电流所产生磁通的方向
RD
Ra Laa Lbb
ia Rb ib
(按右手法则)相同。
3)定子和转子各绕组磁链的正方向与其磁轴的正 方向相同,
0 0
0 Ra 0 0 0 Rf
0 0
0 0
0 0
ic if
c f
0
0
0
0
0 RD 0
0
iD
D
0 0 0 0 0 0 Rg 0 ig g
0
5)转子的位置由转子位置角α(简称转子角)确 定,转子角为定子a绕组磁轴正方向与转子d轴磁 轴正方向间的夹角。
a
d
y
c
D
a
Q g
D
o
f
Dx
f
g
b
Q D
c
z
b
q
考虑到暂态过程中电压、电流和磁链都随时间
变化,因此,用小写字母表示它们的瞬时值。 需要说明的是,定子a、b、c三相绕组和转子励 磁f绕组是同步电机真实存在的绕组,而阻尼绕 组是虚拟的等值绕组。