(完整word版)件 数据采集系统
(完整word版)信息检索考试题汇总(附答案)
(完整word版)信息检索考试题汇总(附答案)一、单项选择题(从下列各题四个备选答案中选出一个正确答案,并将其代号写在答题纸相应位置处。
每题2分,共30分)1._C_ 是题录型检索工具A。
CABI B.中国学术期刊文摘C.全国报刊索引(自然版)D.经济纵横2。
浏览超星数字图书馆,应首先安装__D_____.A。
Apabi Reader B。
Adobe Reader C。
CAJ ViewerD. SSReaderA。
DIALOG系统B.OBRIT系统C.OCLC系统D.STN 系统4. 利用baidu搜索信息时,要将检索范围限制在网页标题A。
site:B。
intitle:C. inurl: D。
info:5.国际农业和生物科学中心英文名称的简称为_A 。
A。
CABI B。
AGRINDEX C。
BA D.B of A6.信息检索根据检索对象不同,一般分为___C___________。
A。
二次检索、高级检索B.分类检索、主题检索C.数据检索、事实检索、文献检索D.计算机检索、手工检索7。
国际上评价期刊最有影响力的一个指标是___A_____。
A. 影响因子B。
读者统计数据C.引文量D。
价格8。
二次检索指的是:___C__________。
A.第二次检索B.检索了一次之后,结果不满意,再检索一次C.在检索结果中运用“与、或、非"进行再限制检索D.以上都不是9。
国际连续出版物编号___A__________.A.ISSN B。
OCLC C.ISBN D。
CSSCI10.下列搜索引擎具有书名号检索功能的有______B________.A.Google B.百度C。
中搜D.AltaVista11.《中文核心期刊要目总览》2004 版的“农业经济"类核心期刊有_B__ 种.A.20 B.19 C.17 D.1512.通过追溯检索获得的相关文献与原文献相比在发表时间上__B__。
A.早B。
(完整word版)SCADA系统基本概述
SCADA系统基本概述一、SCADA系统介绍SCADA是Supervisory ControI And Data AcquiSition System (数据采集与监视控制系统)的缩写,SCADA系统是对分布距离远,生产单位分散的生产系统的一种数据采集、监视和控制系统。
它应用领域很广,可以应用于电力、冶金、石油、化工等领域的数据采集与监视控制以及过程控制等诸多领域,其中在电力系统中的应用更为广泛,发展技术也最为成熟。
它在远动系统中占重要地位,可以对现场的运行设备进行监视和控制,以实现数据采集、设备控制、测量、参数调节以及各类信号报警等各项功能,即我们所知的“四遥”功能。
RTU(远程终端单元),FTU(馈线终端单元)是它的重要组成部分。
在现今的变电站综合自动化建设中起了相当重要的作用。
它是架构在 PC 之上的生产自动化控制系统。
当然不同领域的应用,所需功能也不尽相同,但是它们都具有以下基本特色:图形操作介面;系统状态动态模拟;即时和历史资料趋势曲线显示;警报处理系统;资料获取取与记录;报表输出.二、SCADA模块构成SCADA系统会包括以下的子系统:1、人机界面(human machine interface,简称HMI)是一个可以显示程序状态的设备,操作员可以依此设备监控及控制程序.人机界面(或简称为HMI)一个可以显示程序状态的设备,操作员可以依此设备监控及控制程序。
HMI会链接到SCADA系统的数据库及软件,读取相关信息,以显示趋势、诊断数据及相关管理用的信息,如定期维护程序、物流信息、特定传感器或机器的细部线路图、或是可以协助故障排除的专家系统。
HMI系统常会用图像的方式显示系统的信息,而且会用图像模拟实际的系统。
操作员可以看到待控制系统的示意图.例如一个连接到管路的泵浦图标,可以显示泵浦正在运转,及管路中液体的流量,操作员可以使泵浦停机,HMI软件会显示管路中液体流量随时间下降。
模拟图会包括线路图及示意图来表示制程中的元素,也可能用制程设备的图片,上面再加上动画说明制程情形。
完整word版数据库系统原理及应用教程第四版课后答案
第一章1、(1)数据:数据用于载荷信息的物理符号。
123(2)数据的特征;之分;○数据受数据类型和取值范围的约束;○○数据有“型”和“值”4数据应具有载体和多种表现形式。
数据有定性表示和定量之分;○1组织和保存数据功能,即将收集到的数据合理地分类组织,将3、(1)数据管理的功能:○2数据维护功能,即根据需要随时进行其存储在物理载体上,使数据能够长期的被保存;○3数据查询和数据统计功能,即快速的插入新数据,修改原数据和删除失效数据的操作;○4数据的安全和完整性控制功能,即能保护数据得到需要的正确数据,满足各种使用要求;○的安全和完整性。
(2)数据管理的目标:收集完整的信息,将信息用数据表示,按数据结构合理科学的组织并保存数据;为各种使用快速地提供需要的数据,并保护数据的安全和完整性。
4、(1)数据库:是数据管理的新方法和技术,他是一个按数据结构来存储和管理数据的计算机软件系统。
1数据库中的数据具有整体性,即数据库中的数据要保(2)数据库中的数据具有的特点:○2数据库中的数据具有数据共享性,持自身完整的数据结构;○不同的用户可以按各自的用法使用数据库中的数据,多个用户可以同时共享数据库中的数据资源。
5、(1)数据库管理系统:它是专门用于管理数据库的计算机管理软件。
数据库管理系统能够为数据库提供数据的定义、建立、维护、查询和统计等操作功能,并完成对数据完整性、安全性进行操作的功能。
(2)数据库管理系统主要功能:是数据存储、数据操作和数据控制功能。
其数据存储和数据操作是:数据库的定义功能,指未说明库中的数据情况而进行的建立数据库结构的操作;数据库建立功能,指大批数据录入到数据库的操作,它使得库中含有需要保护的数据记录;数据库维护功能,指对数据的插入、删除和修改操纵,其操作做能满足库中信息变化或更新的需求;数据库查询和统计功能,指通过对数据库的访问,为实际应用提供需要的数据。
数据库管理系统的数据控制功能为:数据安全性控制功能,即为了保证数据库的数据安全可靠,防止不合法的使用造成数据库泄露和破坏,也就是避免数据被人偷看、篡改或破坏;数据库完整性控制功能,指为了保证数据库中的数据的正确、有效和相容,防止不合语意的错误数据被输入或输出。
(完整word版)camds录入系统操作说明

CAMD系统操作简介一、登陆页面和主页面介绍首先需要输入用户名和密码迓Id心中国汽车材料数据系统Chin* A Litqftigt : v-e Ma 1 Dat«吕丫qitHE关于举毀培训的連和+ -=壬至话用户菖录肌审Login|;用尸名:忘旦登录用户言1.晋阳tI.语言;中哀B降僵挥! EIr在:征羽;83 ny■:韦碎用存下砖加不时卫艺誇诗冋壬祠■主界面主要用到的板块:1、模块作用介绍(1)创建:1.材料数据表可以添加提交客户的相关零件和材料信息2.组件单元可以添加内部发送的相关零件和材料信息(2 )查找:查找通过内部发送和提交的相应信息(3)管理可以在运来的供应商下添加子账户,权限可以一样三、材料录入首先点击组件单元,选择材料项目对用的创建,进入材料选择界面,选择需要输入的材料的类型,对于有些材料还需要选择对应的材质信息。
然后,进入创建界面:t ■圍*iht缈励甘命址谥Q己1、杠壬41印科仲1工圈 和林铢却卧■册卩齒也栅・酣&出它庖 W就硼曲用iMHtfi WH^£:KHKtflW EO1J&w.i 2|~三1-L1 1.1.32t JJ t 1^3I2.1.E2.L2 2^3-7.(未裂凹I•戦淳出HSiFLtSSm±—]tiin舛M 辅0■■帘=41fl£41^]W ID+I-ZE^T !&4-»-.2:唱魅E】W[砂 4;可進商i寒也可Q草魏毗离号啊 匾下圖削ms 》.字KI 士加打十爸■豊0I.!6.W*M5种INC盏 iiSLis:皆gB8・gE£Br■ J.C :餐 vWl-円!0 • •垃•JF Li -K :: Jl. MP?吨「M#L -:I.H…」DL加-需要输入材料名称、材料号、商品名等信息,信息输入越多,查找的可靠性越高。
选择左上角的黄色三角符号添加基本物质,需申振是否°未霸定 被蔡止是否心未确定需关连是否°未确定查携I 惡消tlF-lndex也s 号GADSL[i胴Copper7+iO-50-823:-15^-6CuDL 黑r 昱示1pb卯丄页第 _ 页蔬蝇如果选择聚合物,在后面录入零件时需要另外标注聚合物 选择完之后:J___________单击辅入一乍鲫矿? CAS 编号:EU-Index:E 角号:类:I ____ 訂GADSL^ REACH-SV HC选择类别,(注意:根据国家要求,材料中禁止加入有害材料。
(完整word版)员工管理系统
一系统层次模块图总的系统模块主要包括:管理员的登陆;员工信息查看、修改、删除、增加;职位信息修改、删除、增加;部门信息修改、删除、增加;签到信息管理等功能模块。
总的系统功能结构图,如图2-1所示:图2-1 总的系统层次模块图系统设计流程图如2-3图所示:图2-3 系统设计流程图一个员工对应一个职位,一个员工对应一个部门,一个员工对应一个签到信息。
员工与相关信息表的E-R图如图3-5所示:1. admin(管理员信息表)管理员信息表用来存储管理员的基本信息。
其中包括管理员用户名和管理员登录密码等字段,表admin的结构如表3-1所示:字段名数据类型长度是否主键描述Id int 4 是唯一标识ldy_str_uname varchar30管理员用户名ldy_str_pwd varchar 20 登陆密码2. users (员工信息表)员工信息表(users)此表主要用于存储员工的相关信息,包括员工编号,员工名,员工地址,员工性别,员工备注,员工年龄以及与各表连接的相关字段等。
表users的结构如表3-2所示。
3. dep(部门信息表)此表主要用于存储部门的信息,包括部门编号,部门名称,部门备注等。
表dep的结构如表3-3所示。
4. job(职位信息表)职位信息表主要用于保存各类职位信息,包括职位编号,职位名称,职位工资,职位备注等字段。
表job的结构如表3-4所示。
5. qiandao(签到信息表)签到信息表主要用于保存员工签到信息,包括签到编号,员工编号,签到次数等字段。
表qiandao的结构如表3-5所示。
(完整word版)基于STM32的数据采集系统英文文献

Design of the Data Acquisition System Based on STM32ABSTRACTEarly detect ion of failures in machi nery equipme nts is one of the most importa nt concerns to industry. In order to monitor effective of rotating machinery, we developme nt a micro-c on troller uC/OS-II system of sig nal acquisiti on system based on STM32 in this paper. we have give n the whole desig n scheme of system and the multi-cha nnel vibrati on sig nal in axis X, Y and Z of the rotary shaft can be acquired rapidly and display in real-time. Our system has the character of simple structure, low power con sumpti on, mini aturizati on.Keywords: STM32; data acquisition; embedded system;uC/OS-ll;1.1. I ntroductionThe real-time acquisition of vibration in rotating machinery can effectively predict, assessa nd diag nose equipme nt operati on state, the in dustry gets vibratio n data acquisiti on Rapidly and an alysis in real-time can mon itor the rotati ng mach inery state and guara ntee the safe running of the equipme nt. I n order to preve nt failure, reduce maintenance time, improve the econo mic efficie ncy, The purpose of fault diag no sis system can detect these devices through the vibratio n sig nal acquisiti on of rotating machinery, and process the data acquisition, then it will make timely judgme nt of running state of equipme nt .While the data acquisiti on module is the core part of the fault diag no sis system [1-4].The practical applicati on in the in dustrial field, is the equipment operating parameters will be acquired to monitor equipment operati ng state. In traditi onal data acquisiti on systems, the data from acquisiti on card are gen erally send into the computer, and specific software will be developed for the data acquisition. The main contribution of this paper has designed the STM32 platform with ARM tech no logy, that has become a traditi onal main stream tech no logy in embedded systems, and the collect ing data toward the directi on of high real-time, multi-parameter,high-precision, while data storage become large capacity, more mini aturizati on andportable, and the developme nt of multicom muni cati on mode and Iong-distanee for data transmission. So as to meet the actual acquisition system multitask ing requireme nts, this article has desig ned based on STM32 micro-co ntroller uC/OS-ll system of sig nal acquisiti on system. Therefore, in order to meet the actual acquisiti on system multitask requireme nts, this no velty of this article has desig ned a sig nal acquisiti on system in micro-c on troller uC/OS-ll based on STM32.2. Architecture of data acquisition systemData acquisiti on as key tech no logy for mon itori ng equipme nt, rece ntly a lot of work has been done on it. An embedded parallel data acquisition system based on FPGA is Optimized designed which will make it reasonableto divide and allocatehigh-speed and low-speed A/D [5]. I nstead, it has use a high-speed A/D converter and Stratix II series of FPGA for data collection and processing, in which the main contribution is used of the Compact Peripheral Component In terc onn ect, the system has the characters of modularizati on, sturd in ess and scalability [6].But remote control will be needed in Special Conditions, this paper introduce the embedded operating system platform based on Windows CE and uC/OS-II to desig n a remote acquisiti on and con trol system with the GPRS wireless tech no logy [7-8]」n order to achieve the data shari ng of multi-user, it has build the embedded dyn amic website for data acquisiti on man ageme nt and dissem in ati on with the ARM9 and Linux operation system [9].A data collection terminal devices is designed based on ARM7 microprocessor LPC2290 and embedded real-time operati ng system uC/OS-II to solve the real-time acquisiti on of multicha nnel small sig nal and multi-cha nnel tran smissi on[ 10].O n the other han ds, two parallel DSP-based system dedicated to the data acquisiti on on rotati ng machi nes, and the inner sig nal con diti oner is used to adapt the sen sor output to the in put range of the acquisiti on, and the n sig nal post-process in gby the desig n software, while the most frequently structure is to use DAS andFPGA-based, and such programs are also depe ndent on the DAS cost.In order to meet market requireme nts of low power con sumpti on, low cost, and mobility, Fig.1 in this paper presents the design overall structure diagram of data acquisiti on system. Through SPI in terface, the system gets the data collectio n with three axis accelerati on sen sori nto the STM32 con troller of inner A/D conv ersi onmodule with 12-bit, this process is non-interfering parallel acquisition. Our system uses 240x400 LCD and touch screen module real-time to display the collected data in real time.Fig. 1 Hardware Framework of System2.1. STM32 micro-controllerA 32 bit RISC STM32F103VET6, used as the processor in our system, compared with similar products, the STM32F103VET6 work at 72MHZ, with characters of stro ng performa nee and low power con sumptio n, real-time and low-cost. The processor in cludes: 512K FLASH, 64K SRAM, and it will commu ni cate by usi ng five serial ports which con tai n a CAN bus, a USB2.0 SLA VE mode and a Ethernet in terface, what s more two RS232 ports are also in cluded. The system in our paper exte nd theSST25VF016B serial memory through the SPI bus in terface, that will regard as the temporary storage whe n collect large nu mber of data, furthermore, we have the A/D converter with 12 bits resolution, and the fastest conversion up to 1us, with 3.6 Vfull-scale of the system .In additi on to desig n of the system power supply circuit, the reset circuit, RTC circuit and GPIO port to assurancesystem needs andno rmal operati on.2.2. Data acquisitionThe machi ne state is no rmal or not is mainly depe nded on the vibrati on sig nal. In this paper, to acquire the vibration data of rotating machinery rotor, we have used vibrati on accelerati on tran sducers MMA7455L which could collect the data from axis x, y, and z of the company of Free-scale. The kind of vibration acceleration transducers has advantage of low cost and small size, high sensitivity and large dynamic range with small interferenee. MMA7455L is mainly consists of gravity sensing unit and signal conditioning circuit composition, and this sensor will amplify the tiny data before sig nal preprocess in g. In data acquisiti on process of our system, the error of sampling stage is mainly caused by quantified, and the error is depended on the bits of the A/D converter ,when we regard the maximum voltage as V max , the AD converter bits is n, and the quantization Q = V max/2n, then, the quantization error is obeyed uniformdistribution in [- q / 2, q / 2] [13].AVhik e"is averaae eixor. is enor variance . and —is SNR* 」 " NThe designed STM32 could built at most three 12-bit parallel ADC in this paper , which theoretical in dex is 72dB and the actual dyn amic range is betwee n 54 to 60dB while 2 or 3 bits is impacted by noise, the dynamic range of measurement can up to 1000 times with 60dB. For the vast majority of the vibration signal, the maximum sampli ng rate of 10kHZ can meet actual dema nd, and the higher freque ncy of collecti on is gen erally used in the 8-12 bits AD, therefore one of con tributi on of this work is to (2) ⑶⑷I ep(e)de = OS V max2V max3Pinax 、—宀対-=—= >12V2—1£12choose a built-in 12-bit A/D to meet the accuracy of vibration signal acquisiti on and lower cost in this experime nt.3. Software design3.1. Transplantation of C/OSIn order to ensure real-time and safety data collection requirements, in this system, a kind of RTOS whose source code is ope n and small is proposed. It also can be easily to be cut dow n, repotted and solidified, and its basic functions in clud ing task management and resource management, storage management and system management. The RTOS embedded systemcould support 64 tasks, with at most 56 user tasks, and four tasks of the highest and the lowest priorities will be reta ined in system. The uC/OS-II assig ns priorities of the tasks accordi ng to their importa nee, the operation system executive the task from the priority sequenceand each task have in depe ndent priority. The operati ng system kernel is streamli ned, and multi-task ing fun cti on is well compared with others, it can be tran spla nted to processors that from 8-bit to 64-bit.The transplant in the system are to modify the three file system structure:OS_CPU_C.H OS_CPU.C, OS_CPU_A.ASM. Main transplantation procedure is as follows:A. OS_CPU_C.HIt has defi ned the data types, the len gth and growth direct ion of stack in the processor. Because different microprocessors have different word length , so theuC/OS-II tran spla ntati on in clude a series of type defi niti on to en sure its portability, and the revised code as follows:typedef un sig ned char BOOLEAN;typedef un sig ned char INT8U;typedef signed char INT8S;typedef un sig ned short INT16U;typedef sig ned short INT16U;typedef un sig ned int INT32U;typedef sig ned int INT32S;typedef float FP32;typedef double FP64;typedef un sig ned int OS_STK;typedef un sig ned int OS_CPU_SR;Cortex-M3 processor defi nes the OS_ENTER_CRITICAL () andOS_EXIT_CRITICAL () as ope ning and clos ing in terrupt, and they must set to 32 bit of the stack OS_STK and CPU register len gth. In additi on, that has defi ned the stack poin ter OS_STK_GROWTH stack growth direct ion from high address to lower address.B. OS_CPU.CTo modify the function OSTaskStklnit() according to the processor, the nine rema ining user in terface fun cti ons and hook fun cti ons can be n ull without special requirements, they will produce code for these functions only when theOS_CPU_HOOKS_EN is set to 1 in the file of OS_CFG .H. The stack initialization fun cti on OSTaskStk Init () retur n to the new top of the stack poin ter.OS_CPU_A.ASMMost of the tran spla nt work are completed in these docume nts, and modify the followi ng functions.OsStartHighRdy() is used for running the most priority ready task, it will be resp on sible for stack poin ter SP from the highest priority task of TCB con trol block, and restore the CPU, the n the task process created by the user start to con trol the process.OSCtxSw () is for task switch ing, When the curre nt task ready queue have a higher priority task, the CPU will start OSCtxSw () task switchi ng to run the higher priority task and the curre nt task stored in task stack.OSIntCtxSw () has the similar function with OSIntSw (), in order to ensurereal-time performa nee of the system, it will run the higher priority task directly whe n the in terrupt come, and will not store the curre nt task.OSTickISR () is use to handle the clock interrupt, which needs interrupt to schedule its impleme ntati on whe n a higher priority task is wait ing for the clock sig nal.OS_CPU_SR_Save () and OS_CPU_SR_Restore () is completed to switch in terrupt while en teri ng and leav ing the critical code both functions impleme nt by the critical protectio n fun ctio n OS_ENTER_CRITICAL () and OS_EXIT_CRITICAL ().After the completion ofthe above work, uC/OS-ll can run on the processors. 3.2. Software architectureFig.2 shows the system software architecture, so as to display the data visualized,uC/GUI3.90 and uC/OS-II is transplanted in the system, our system contains six tasks such data acquisiti on, data tran smissi on, LCD display, touch scree n driver, key-press management and uC/GUI interface.First of all, we should set the task priority and the task scheduling based on the priority. It needs complete the required driver design before the data acquisition, such as A/D driver, touch panel driver and system initialization, while the initializations include: hardware platform initialization, system clock initialization, interrupt source configuration, GPIO port configuration, serial port initialization and parameter configuration, and LCD in itializati on. The process is that the cha nnel module sent sampli ng comma nd to the AD channel, then to inform the receiver module it has been sent the sample start comma nd, the receiver module is ready to receive and large data will store in the storage module, after the completion of the first sampling, channel module will send the complete comma nd of sampli ng to the receiver module, the receiver sends an in terrupt request to the storage module to stop the data stori ng, the n the data will display on the LCD touch scree n. The data acquisiti on process show n in Fig.3Hui-fti Zhtmg tiiui Karif* / Proceditt Cotripufer Scienct! 17『20”J 222 - 228Fig - SofhvBtre Architecture of SyMem Tig 3 Data Acqm;>ition of FlowChait4. ExperimentsThe experiment of the embedded system has been done and data acquisitioncomes from the accelerati on of MMA7455L, which is in stalled on the bench of rotat ing mach ine. The data acquisiti on have displayed as show n in Fig.4 and Fig.5, the system can select three channels to collect the vibration signal from the three directi ons of X, Y and Z-axis , and in this paper the sampli ng freque ncy is 5KHZ and we have collect the vibration signal from normal state of unbalaneed state at the same channel. The result shows that our system can display real-time data acquisition and5. Conclusion This paper has designed an embeddedsignal acquisition system for real time according to the mechanical failure occurred with high frequency of in the rotatingmachines. The system is based on a low cost microcontroller, Vibration signals is picked by the three axis accelerati on sen sor which has the performa nee of low cost and high sen sitivity, and the acquisiti on data from axis x, y, and z. We have desig ned the system hardware structure, and an alyses the work ing prin ciple of data acquisiti on module. The proposed system of uC/OS-ll realize the data task management and scheduling, and it is compacted with structure and low cost, what's more the system collects the vibration signal and analysis in real-time of the rotating machines, and then quickly gives diag no stic results. AcknowledgementsThis work was supported by The Nati onal Natural Scie nee Foun dati on of China (51175169); Chi na Natio nal Key Tech no logy R&D Program(2012BAF02B01); Pla predict the prelimi nary diag no sis rapidly. Fig.4 Noimal Dntn Acquisition Fi^ ,5 LJiibalance Data Acqmsihonnned Scie nee and Tech no logy Project of Hunan Provin ce(2009FJ4055);Scie ntific Research Fund of Hu nan Provi ncial Education Departme nt(10K023). REFERENCES[1] Cheng, L., Yu, H., Research on intelligent maintenance unit of rotary machine, Computer Integrated Manufacturing Systems, vol. 10, Issue: 10, page 1196-1198, 2004.[2] Yu, C., Zhong, Ou., Zhen, D., Wei, F., .Design and Implementation of Mon itori ng and Man ageme nt Platform in Embedded Fault Diag no sis System, Computer Engin eeri ng, vol. 34 , Issue: 8, page 264-266, 2008.[3] Bi, D., Gui, T., Jun, S., Dynam . Behavior of a High-speed Hybrid Gas Bearing-rotor System for a Rotat ing ramjet, Jour nal of Vibrati on and Shock, vol. 28, Issue: 9, page 79-80, 2009.[4] Hai, L., Jun, S., Research of Driver Based on Fault Diag no sis System Data Acquisiti on Module, Mach ine Tool& Hydraulics, vol. 38 , Issue: 13, page 166-168, 2011.[5] Hao, W., Qin, W., Xiao, S., Optimized. Desig n of Embedded Parallel Data Acquisition System, Computer Engineering and Design, vol. 32, Issue: 5, page1622-1625, 2011.[6] Lei, S., Ming, N., Design and Implementation of High Speed Data Acquisiti on System Based on FPGA, Computer Engin eeri ng, vol. 37, Issue: 19, page 221-223, 2011.[7] Chao, T., Jun, Z., Ru, G., Design of remote data acquisition and control system based on Win dow CE, Microcomputer& Its Applicati ons , vol. 30, Issue: 14, page 21-27, 2011.[8] Xiao, W., Bin, W., SMS con trolled in formatio n collectio n system based on uC/OS-II, Computer Applicatio n, vol. 12, Issue: 31, page 29-31,2011.[9] Ti ng,Y., Zhong, C., Con structio n of Data Collectio n& Release in Embedded System, Computer En gi neeri ng, vol. 33, Issue: 19, page 270-272, 2007.[10] Yo ng, W., Hao, Z., Pen g,D., Desig n and Realization of Multi-fu nction Data Acquisition System Based on ARM, Process Automation Instrumentation, vol. 32, Issue: 1, page: 13-16, 2010.[11] Betta, G, Liguori, C., Paolillo, A., A DSP-Based FFT An alyzer for the FaultDiag no sis of Rotati ng Mach ine Based on Vibrati on An alysis, IEEE Tran sacti on on In strume ntati on and Measureme nt, vol. 51, Issue: 6, 2002.[12] Con treras-Medi na LM., Romero Tron coso RJ., Millan Almarez JR., FPGA Based Multiple-Cha nnel Vibrati on An alyzer Embedded System for In dustrial Applicati on in Automatic Failure Detect ion, IEEE tran sacti ons on Intern ati onal and measureme nt, vol. 59, Issue: 1, page 63-67, 2008.[13] Ch on, W., Shua ng, C., Desig n and impleme ntati on of sig nal detecti on system based on ARM for ship borne equipme nt, Computer Engin eeri ng and Desig n, vol. 32, Issue: 4, page: 1300-1301,2011.[14] Miao, L., Tia n, W., Ho ng, W., Real-time An alysis of Embedded CNC System Based on uC/OS-ll, Computer En gi neeri ng, vol. 32, Issue: 22, page 222-223, 2006.。
(完整word版)大数据技术文档
第1章绪论随着计算机技术、通信网、互联网的迅速发展和日益普及,Internet上的信息量快速增长。
从海量的信息块中快速检索出用户真正需要的信息正变得很困难,信息搜索应向着具有分布式处理能力方向发展,本系统利用hadoop分布式开源框架良好的扩充能力、较低的运作成本、较高的效率和稳定性来满足需求。
现状:缺陷和不足:(1)结果主题相关度不高。
(2)搜素速度慢。
引入hadoop+nutch+solr的优点:(1)hadoop平台数据处理高效。
hadoop集群处理数据比起单机节省数倍的时间,数据量越大优势越明显,满足信息采集对数据处理的速度和质量要求。
(2)hadoop平台具有高扩展性.可以适当扩展集群数量来满足日益不断增加的数据量,而这并不会毁坏原集群的特性。
(3)安全可靠性高。
集群的数据冗余机制使得hadoop能从单点失效中恢复,即Hadoop能自动进行数据的多次备份,以确保数据不丢失,即使当某个服务器发生故障时,它也能重新部署计算任务。
(4) Nutch不仅提供抓取网页的功能,还提供了解析网页、建立链接数据库、对网页进行评分、建立solr索引等丰富的功能。
(5)通过Nutch插件机制实现了系统的可扩展性、灵活性和可维护性,提高了开发效率。
能够根据用户需求进行灵活定制抓取和解析,提高了系统使用性。
(6)通过solr集群,采用分布式索引在不同的机器上并行执行,实现检索服务器之间的信息交换.可以通过设定主题进行索引检索。
研究目标和内容本文的研究目标是全面深入分析研究分布式搜索引擎,进而优化分布式搜索引擎中的索引构建策略,内容包括:(1)深入研究hadoop分布式平台,仔细剖析hadoop中的分布式文件系统HDFS和map/Reduce编程模型。
(2)深入研究Nutch架构、相关技术与体系结构,着重研究分析Nutch插件系统的内部结构和流程;对protocol-httpclient插件进行开发支持表单登录;对 url过滤、信息解析插件进行开发,提高搜索的主题相关度;(实现用mapreduce的google的排序算法,改进系统搜索的关联度)。
(完整word版)基于51单片机的酒精检测仪课程设计
1甲醇测试仪总体方案设计1.1甲醇浓度检测仪设计要求分析设计的甲醇浓度测试仪应具有如下特点:(1)数据采集系统以单片机为控制核心,外围电路带有LED显示以及键盘响应电路,无需要其他计算机,用户就可以与之进行交互工作,完成数据的采集、存储、计算、分析等过程。
(2)系统具有低功耗、小型化、高性价比等特点。
(3)从便携式的角度出发,系统成功使用了数码管显示器以及小键盘。
由单片机系统控制键盘和LED显示来实现人机交互操作,界面友好。
(4)软件设计简单易懂。
1.2甲醇浓度检测仪设计方案设计时,考虑甲醇浓度是由传感器把非电量转换为电量,传感器输出的是0-5伏的电压值且电压值稳定,外部干扰小等。
因此,可以直接把传感器输出电压值经过A/D转换器转换得到数据送入单片机进行处理。
此外,还需接人LED显示,4*4键盘,报警电路等。
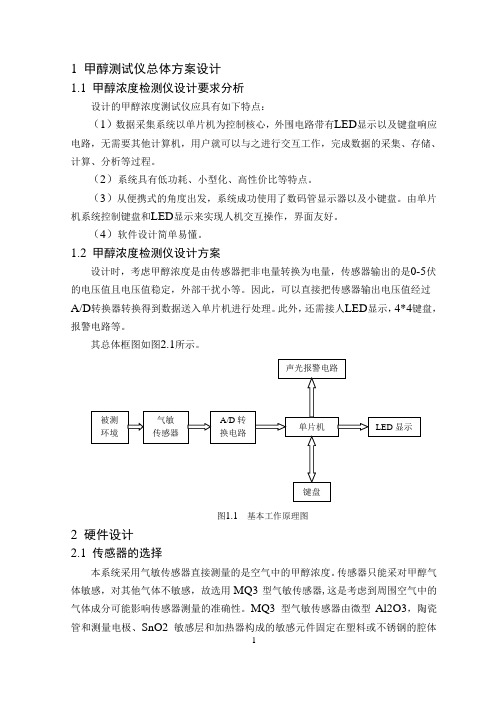
其总体框图如图2.1所示。
图1.1基本工作原理图2硬件设计2.1传感器的选择本系统采用气敏传感器直接测量的是空气中的甲醇浓度。
传感器只能采对甲醇气体敏感,对其他气体不敏感,故选用MQ3型气敏传感器,这是考虑到周围空气中的气体成分可能影响传感器测量的准确性。
MQ3型气敏传感器由微型Al2O3,陶瓷管和测量电极、SnO2敏感层和加热器构成的敏感元件固定在塑料或不锈钢的腔体内,加热器为气敏元件的工作提供了必要的工作条件。
MQ3型气敏传感器有很高的灵敏度、良好的选择性、长期的使用寿命和可靠的稳定性。
传感器的标准回路有加热回路和信号输出回路两部分组成,它可以准确反映传感器表面电阻值的变化。
传感器的表面电阻RS的变化,是通过与其串联的负载电阻RL上的有效电压信号VRL输出面获得的。
负载电阻RL可调为0.5-200K。
加热电压Uh为5v。
上述这些参数使得传感器输出电压为0-5V。
MQ3型气敏传感器的结构和外形、标准回路、传感器阻值变化率与酒精浓度、外界温度的关系图如图3-3所示。
一般在测量前需将传感器预热5分钟,这个样子是为了使测量的精度达到最高,误差最小,需要找到合适的温度。
(完整word版)数据库设计文档(word文档良心出品)
XXX人资信息管理系统数据库设计文档1 文档介绍1.1编写目的作为软件设计文档的重要组成部分,本文档主要对该软件后台数据库的概念模型设计和物理模型设计作出了统一的规定,同时确定了每个表的数据字典结构。
它是开发人员,测试人员编码及测试的重要参考依据。
1.2适用范围本概要设计文档提供给系统设计开发人员,包括详细设计人员和项目组成员,不得提供给公司外人员。
1.3 读者对象本文档的主要读者包括:1. 本系统的设计人员:包括模块设计人员2. 本系统的系统开发人员:包括数据库开发、编码人员3. 本系统的测试人员1.4 参考文献主要为人资信息管理系统.ppt、人资信息管理系统需求分析与概要设计。
2 数据库环境说明数据库采用Micrsoft SQL Server数据库管理系统建立并维护。
数据库设计过程中采用Micrsoft公司的Visio创建进销存数据库的ER图,并生成数据库脚本文件“数据库设计.DDL”。
其中SQL Server的登录模式为混和身份验证,超级用户的用户名均为sa,密码为:123456,SQL Server服务器的端口号:1433。
3 数据库的命名规则符合3个范式:☑主键外键关系、表间关系、表中字段是不可再分的属性。
☑表的表示:描述单一信息,功能简单实用、命名规范合理。
☑字段的类型,长度。
☑数据库的命名:采用全部大写形式。
如:人资管理系统,数据库名称为RSHGL(人事管理)。
☑数据库表命名:所有表以RSH_开头,后面跟中文拼音缩写,采用全部大写形式。
如:职工基本信息表数据库名称为RSH_ZHGJBXX4逻辑设计本系统的数据库按照面向对象的思想,设计对应实体类,由实体类生成对应的数据库表,数据表中的关系,反应了对象间的关系5数据库的实施本系统基于SQL Server 2008 R2,数据库的名称为:DB_OA,由SendMessage、ReadMessage、Role、RolePrivilege、Privilege、User、RecordBackUp、Plan、Company共10个数据表组成。
《流体力学》实验教案(全)

《流体力学》实验教案(一)word版一、实验目的1. 理解流体力学的基本概念和原理;2. 掌握流体力学实验的基本方法和技能;3. 培养观察、分析和解决问题的能力。
二、实验原理1. 流体的定义和分类;2. 流体力学的守恒定律:质量守恒定律、动量守恒定律;3. 流体的粘滞性和湍流。
三、实验设备与材料1. 流体容器;2. 流量计;3. 压力计;4. 流速计;5. 粘度计;6. 计算机及数据采集系统。
四、实验内容与步骤1. 流体容器中的静压和动压测量;2. 流体流动的粘滞性实验;3. 流体流动的湍流实验;4. 流量计和流速计的使用;5. 数据采集与处理。
五、实验报告要求1. 实验目的、原理、设备与材料介绍;2. 实验步骤与过程描述;3. 实验数据的采集与处理;4. 实验结果分析与讨论;5. 实验结论。
《流体力学》实验教案(二)word版六、实验目的1. 学习使用流量计和流速计;2. 研究流体流动的连续性方程;3. 探究流体流动的伯努利方程。
七、实验原理1. 流体流动的连续性方程:质量守恒定律在流体流动中的应用;2. 伯努利方程:流体流动中的能量守恒定律。
八、实验设备与材料1. 流体容器;2. 流量计;3. 压力计;4. 流速计;5. 计算机及数据采集系统。
九、实验内容与步骤1. 流量计和流速计的使用方法;2. 流体流动的连续性方程实验;3. 流体流动的伯努利方程实验;4. 数据采集与处理;5. 实验结果分析与讨论。
十、实验报告要求1. 实验目的、原理、设备与材料介绍;2. 实验步骤与过程描述;3. 实验数据的采集与处理;4. 实验结果分析与讨论;5. 实验结论。
《流体力学》实验教案(三)word版十一、实验目的1. 研究流体流动的阻力与压力损失;2. 学习使用压力计测量流体压力;3. 分析流体流动中的摩擦阻力。
十二、实验原理1. 流体流动的阻力与压力损失:摩擦阻力和局部阻力;2. 达西-魏斯巴赫方程:描述流体流动中压力损失的公式。
中医基本现状调查数据采集系统(单机版)操作指南

联系方式及技术支持获取途径
电话支持 邮件支持 在线帮助文档
拨打技术支持热线:12345(示例号码,实际号码请参 照官方文档)。
发送邮件至技术支持邮箱: [support@](mailto:support@example. com)(示例邮箱,实际邮箱请参照官方文档)。
访问官方网站,查看在线帮助文档或FAQ(常见问题解 答)。
报告模板
提供多种报告模板供用户选择, 用户也可以自定义报告模板,满 足不同的报告生成需求。
报告生成
根据用户选择的报告模板和导出 的数据,系统自动生成规范、美 观的报告文档,提高报告编制效 率。
04 操作流程演示
登录及权限设置
01 打开系统登录界面,输入用户名和密码进行登录。 02 根据用户角色和权限,进入系统相应操作界面。 03 系统管理员可设置用户角色和权限,确保数据安
解压安装包
将下载的安装包解压到本地计算机的指定目录。
运行安装程序
双击解压后的安装程序,按照提示完成系统 的安装。
硬件配置要求
处理器
建议使用Intel或AMD的处理器 ,主频2.0GHz以上。
内存
至少4GB RAM,推荐8GB RAM 或更高。
硬盘空间
至少需要500MB的可用硬盘空 间,推荐1GB或更多。
06 总结与展望
本次操作指南总结
01
介绍了中医基本现状调查数据采集系统(单机版)的背景、目的和使用 范围。
02
详细阐述了系统安装、登录、数据录入、数据导出等操作流程。
03
提供了常见问题的解决方案和注意事项,帮助用户更好地使用系统。
04
通过本次操作指南,用户能够熟练掌握系统的基本功能和操作方法, 为中医基本现状调查工作提供有力支持。
(完整word版)顺丰物流信息系统课程设计
目录第1章概述 (1)1.1 概况 (1)1.2 系统开发必要性及可行性分析 (2)第2章系统规划 (3)2.1 系统总体目标 (3)第3章系统分析 (4)3.1 需求分析 (4)3.2 组织结构和功能分析 (5)3.3 业务流程分析 (7)3.4 数据流程分析 (8)第4章系统设计 (9)4.1系统总体结构设计 (9)4.2 数据库结构设计 (11)4.3 输入输出设计 (13)第5章总结 (17)参考文献 (17)第1章概述1.1 概况1.1.1企业概况SF速运(集团)有限公司成立于1993年3月,是一家主要经营国际、国内速递及报关、报检等业务的民营速递企业,总部设在深圳。
在国内包括香港、台湾地区建立了庞大的信息采集、市场开发、物流配送、快件收派等业务机构,为广大客户提供快速、准确、安全、经济、优质的专业物流服务。
截至2009年,经过短短十几年时间,SF集团已经发展成为一家年业务量3.1亿票、年平均增长速度50%以上、基层营业网点2500多个、服务网络覆盖全国32个省市区(含直辖市、香港、台湾、澳门)、员工7万2千多人、自有营运车辆4千余台的大型综合性速递企业。
在国内速递企业中,SF集团的经营规模、网络覆盖和市场份额仅次于中国邮政集团公司(EMS),排名第二位。
1.1.2企业信息系统概况在SF,支撑着快递业务正常运作的信息系统多达40余个,相关IT规章制度达数百项,1T应用流程超过一百个,全职IT人员近300人的资讯科技本部承担着为SF掌管IT系统的重任。
SF快递信息系统种类大体分为四个方面:1、营运类业务管理系统。
面向对象为营运本部用户,通过此类系统可对SF 全网的营运业务做出有效的调度配置和管理。
2、客服类业务管理系统。
面向对象为客户服务部门及其全国呼叫中心,通过与顾客的信息交流互动,实现SF的快速及时服务。
3、管理报表类管理系统。
面向对象为综合本部、公共事务本部、财务本部、人力资源本部等相关部门,将其业务规划、管理计划、月度数据、日常工作信息汇总表等资料形成电子单据,统一制度标准,及时实现管理政令的上传下达,并以清晰规范的形式完善报表考核制度。
(完整word版)重庆大学机械工程测试及答案

第二章 信号分析基础(一)填空题1、 测试的基本任务是获取有用的信息,而信息总是蕴涵在某些物理量之中,并依靠它们来传输的。
这些物理量就是 ,其中目前应用最广泛的是电信号。
2、 信号的时域描述,以 为独立变量;而信号的频域描述,以 为独立变量。
3、 周期信号的频谱具有三个特点: , , 。
4、 非周期信号包括 信号和 信号。
5、 描述随机信号的时域特征参数有 、 、 。
6、 对信号的双边谱而言,实频谱(幅频谱)总是 对称,虚频谱(相频谱)总是 对称。
7、信号x(t)的均值μx 表示信号的 分量,方差2x σ描述信号的 。
7、 当延时τ=0时,信号的自相关函数R x (0)= ,且为R x (τ)的 值。
9、 周期信号的自相关函数是 周期信号,但不具备原信号的 信息。
10、为了识别信号类型,常用的信号分析方法有 、和 。
11、为了获得测试信号的频谱,常用的信号分析方法有 、 和12、设某一信号的自相关函数为)cos(ωτA ,则该信号的均方值为2x ψ= ,均方根值为x rms = 。
(二)判断对错题(用√或×表示)1、 各态历经随机过程一定是平稳随机过程.( )2、 信号的时域描述与频域描述包含相同的信息量。
( )3、 非周期信号的频谱一定是连续的.( )4、 非周期信号幅频谱与周期信号幅值谱的量纲一样.( )5、 随机信号的频域描述为功率谱。
( )6、 互相关函数是偶实函数。
( )(三)单项选择题1、下列信号中功率信号是( )。
A.指数衰减信号B.正弦信号、C.三角脉冲信号 D 。
矩形脉冲信号 2、周期信号x(t) = sin(t/3)的周期为( )。
A. 2π/3 B. 6π C 。
π/3D. 2π 3、下列信号中周期函数信号是( )。
A.指数衰减信号 B 。
随机信号 C 。
余弦信号、D.三角脉冲信号4、设信号的自相关函数为脉冲函数,则自功率谱密度函数必为( )。
A 。
脉冲函数 B. 有延时的脉冲函数 C. 零 D 。
(完整word版)六性报告
阶段: S版本号: A0 ******数据采集系统六性报告文件编号:*****受控状态:编制:年月日审核:年月日工艺会签:年月日质量会签:年月日标准化:年月日批准:年月日******有限公司1.概述本大纲规定了对可视泵组试验台架数据采集系统研制、生产全过程的可靠性、安全性、维修性、测试性、保障性和环境适应性监控要求;确定了全过程可靠性、安全性、维修性、测试性、保障性和环境适应性保证的各项要求;提出了各阶段的控制方法,保证对可能出现的问题或故障提出预防措施、检查方法和纠正措施,保证阶段转移工作顺利进行;保证设计能达到要求的功能、性能。
本大纲用于指导*****台架数据采集系统项目中研制、生产以及交付后的可靠性、安全性、维修性、测试性、保障性和环境适应性管理。
对大纲提出的各项技术标准要认真进行分析,并执行可靠性、安全性、维修性、测试性、保障性和环境适应性保证及相关的技术标准。
2.引用标准下列标准所包含的条文,通过在本大纲中引用而构成为文本大纲的条文。
本大纲发布时,所示版本均为有效。
所有标准都会被修订,使用本大纲的各方应探讨使用下列标准最新版本的可能性。
GJB368A_2009 装备维修性通用要求GJB450_2004 装备可靠性通用要求GJ1378A-2007 装备以可靠性为中心的维修分析GJB813-90 可靠性模型的建立和可靠性预计QS/WD02-850-29-2011 纠正和预防措施控制程序3.大纲的编制指导思想、方针、目标1.1 3.1指导思想、方针大纲规定“实用、可靠、先进、经济”为本项目指导思想,特别是可靠性设计的指导思想。
每一项工作,必须把可靠性放在首位。
坚持质量第一、信誉第一为本大纲的质量方针。
1.2 3.2目标为便于可靠性、安全性、维修性、测试性、保障性和环境适应性控制,对系统的可靠性、安全性、维修性、测试性、保障性和环境适应性目标提出以下要求:a.在规定的研制周期内,完成满足合同(研制任务书)规定的各项功能、性能、安全保密性、可靠性、安全性、维修性、测试性、保障性和环境适应性等指标要求;b.****台架数据采集系统的可靠性、安全性、维修性、测试性、保障性和环境适应性指标应分配到基层级,通过设计,其可靠性预计值应达到或超过设计目标值;c.*****试验台架数据采集系统的设计定型样机应通过合同规定的可靠性鉴定(验收)实验;d.****试验台架数据采集系统交付用户使用前进行用户操作使用、维修培训,保证交付的产品能充分发挥作战效能良好的技术服务。
智能停车场数据采集管理系统word资料11页
智能停车场数据采集管理系统解决方案京信通信系统(中国)有限公司2019年5月目录第1章系统总体介绍......................................................................................... 错误!未定义书签。
1.1项目需求 (3)1.2系统介绍 (3)1.3系统特点 (3)第2章系统结构及功能 (4)2.1系统结构图 (4)2.2系统网络拓扑图如下: (4)2.3标准停车场管理系统建设 (6)2.4停车场管理系统 (6)第3章前置服务器系统说明............................................................................. 错误!未定义书签。
3.1程序登陆界面............................................................................................. 错误!未定义书签。
3.2程序主界面................................................................................................. 错误!未定义书签。
3.3系统设置..................................................................................................... 错误!未定义书签。
3.4统计............................................................................................................. 错误!未定义书签。
(完整word版)接口习题
习题一1.什么是接口?2.为什么要在CPU与外设之间设置接口?3.微型计算机的接口一般应具备哪些功能?4.接口技术在微机应用中起什么作用?5.接口电路的硬件一般由哪几部分组成?6.接口电路的软件控制程序一般包含哪几部分?7.接口电路的结构有哪几种形式?8.CPU与接口之间有哪几种传输数据的方式?它们各应用在什么场合?9.分析与设计接口电路的基本方法是什么?10.外围接口芯片在微机接口技术中的作用如何?你所知道的外围接口芯片有哪些?11.你认为学习接口技术的难点在那几个方面?应如何对付?习题二1.什么是端口?2.I/O端口的编址方式有几种?各有何特点?3.设计I/O设备接口卡时,为防止地址冲突,选用I/O端口地址的原则是什么?4.I/O端口地址译码电路在接口电路中的作用是什么?5.在I/O端口地址译码电路中常常设置AEN=0,这有何意义?6.若要求I/O端口读/写地址为374H,则在图2。
1(b)中的输入地址线要作哪些改动?7.图2.2是PC机系统板的I/O端口地址译码器电路,它有何特点?试根据图中地址线的分配,写出DMAC、INTR、T/C以及PPI的地址范围?8.在图2。
4译码电路中,若要改变I/O端口地址,使其地址范围为300H~307H则开关S1~S9应如何设置?9.GAL器件有哪些特点?采用GAL器件进行I/O地址译码有何优点?10. 采用GAL 器件设计开发一个地址译码电路的步骤和方法如何?11. 通常所说的I/O 操作是指CPU 直接对I/O 设备进行操作,这话对吗?12. 在独立编址方式下,CPU 采用什么指令来访问端口?13. 在I/O 指令中端口地址的宽度及寻址方式有哪两种?14. CPU 从端口读书据或向端口写数据是否涉及到一定要与存储器打交道?15. I/O 端口地址译码电路一般有哪几种结构形式?16. I/O 地址线用作端口寻址时,高位地址线和低位地址线各作何用途?如何决定低位地址线的根数? 17. 可选式I/O 端口地址译码电路一般由哪几部分组成?18. 采用GAL 器件设计地址译码电路时,其核心是编写GAL 器件输入源文件(即GAL 设计说明书).现利用GAL16V8设计一个扩展系统得地址译码电路,要求该系统的I/O 端口地址范围分别为300H~31FH 和340H~35FH ;存储器地址范围为D0000H ~EFFFFH 。
(完整word版)ADC0808功能及简介
11.2.4典型的集成ADC5片为了满足多种需要,目前国内外各半导体器件生产厂家设计并生产出了多种多样的ADC5片。
仅美国AD公司的ADCT品就有几十个系列、近百种型号之多。
从性能上讲,它们有的精度高、速度快,有的则价格低廉。
从功能上讲,有的不仅具有A/D转换的基本功能,还包括内部放大器和三态输出锁存器;有的甚至还包括多路开关、采样保持器等,已发展为一个单片的小型数据采集系统。
尽管ADC5片的品种、型号很多,其内部功能强弱、转换速度快慢、转换精度高低有很大差别,但从用户最关心的外特性看,无论哪种芯片,都必不可少地要包括以下四种基本信号引脚端:模拟信号输入端(单极性或双极性);数字量输出端(并行或串行);转换启动信号输入端;转换结束信号输出端。
除此之外,各种不同型号的芯片可能还会有一些其他各不相同的控制信号端。
选用ADC芯片时,除了必须考虑各种技术要求外,通常还需了解芯片以下两方面的特性。
(1)数字输出的方式是否有可控三态输出。
有可控三态输出的ADC芯片允许输出线与微机系统的数据总线直接相连,并在转换结束后利用读数信号RD选通三态门,将转换结果送上总线。
没有可控三态输出 (包括内部根本没有输出三态门和虽有三态门、但外部不可控两种情况)的ADC5片则不允许数据输出线与系统的数据总线直接相连,而必须通过I/O接口与MPU&换信息。
(2)启动转换的控制方式是脉冲控制式还是电平控制式。
对脉冲启动转换的ADC5片,只要在其启动转换引脚上施加一个宽度符合芯片要求的脉冲信号,就能启动转换并自动完成。
一般能和MPH已套使用白芯片,MPU勺I/O写脉冲都能满足ADC5片对启动脉冲的要求。
对电平启动转换的ADC5片,在转换过程中启动信号必须保持规定的电平不变,否则,如中途撤消规定的电平,就会停止转换而可能得到错误的结果。
为此,必须用D触发器或可编程并行I/O接口芯片的某一位来锁存这个电平,或用单稳等电路来对启动信号进行定时变换。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国石油大学(华东)现代远程教育《数据采集系统》综合复习资料一、填空题1. 多路模拟开关指标中的MTBF是指平均无故障时间。
2. S/H的捕捉时间是指 S/H的输出从保持状态的值变到当前的输入值所需的时间。
3. 总线是指微机应用系统中传送各种数字信息的公共通道,是各种信号线的集合。
4. A/D转换器的量化误差为±1/2 Δ。
5. 采样是指按照一定的时间间隔取模拟信号的值。
6. DAC0832是一种8位的D/A芯片,其输出分辨率是0.39% 。
7. VFC是将其输入电压的幅值转换成频率与输入电压幅值成正比的输出脉冲串的器件。
8. 某DAS,10路信号共享一路A/D,信号最高频率为50KHz,则多路开关切换速率至少为 1M Hz 时,才能使信号不失真。
9.动态校零放大器的工作分为调零与保持和放大与跟踪两个阶段。
10. 基本比较电路包括电平检测器和迟滞比较器。
11. 采样/保持器由输入、输出缓冲放大器、模拟开关及控制开关动作的逻辑电路和保持电容器三部分组成。
12. A/D转换器的量化间隔为V FS/2n。
13. PC总线按功能可分为:数据总线、地址总线、控制总线。
14. 半导体式多路开关的优点是体积小、重量轻、动作速度快。
15. 数据采集系统的发展趋势是模块化、高速度和智能化。
16.12位的量化器,满量程电压为10V,量化间隔为 2.44mV,最大输出为4095或FFFH 。
17.DAC的线性误差是指芯片的变换特性曲线与理想特性之间的最大偏差。
18.某数据采集系统,有4路模拟量输入通道,每路信号最高频率可达50KHz,若要保证采样的信号不失真,则多路开关的切换速度至少为400KHz Hz。
19.12位A/D,单极性应用,V FS=10V,对其调满度时,输入为9.99634V V,输出应在 FFEH 至 FFFH 之间变化。
20.放大器的零点偏移是指放大器的输入信号为零时输出电压仍不为零。
21.测量放大器的特点有高输入阻抗、高共模抑制比、低零漂。
22.某压力测量系统,要求压力测量范围为1Pa~10Pa,则所选A/D转换器的字长至少应为 4 位才能满足要求。
23.n位A/D转换器的最大输出为2n-1 。
24.某12位D/A,-5V—5V双极性应用,输出电压为4V时对应的输入数字量为E66H 。
25.D/A转换器主要由参考电压、输出放大器、数字量接口和电阻开关网络四部分构成。
26.电压比较器的作用是比较两个输入电压的大小,根据比较的结果输出高电平或者低电平。
27.传感器的作用是将非电量转换成电量。
28.电气机械式式多路开关的特点是体积大,重量大,导通电阻大,断开无漏电流。
29.某四位BCD码量化器,V FS=10V,则此量化器的量化间隔为0.001V,最大输出的数字量为9999。
30.量化是指将模拟量转化成有限字长表示的数字量的过程。
二、简答题1.试述一个典型的数据采集系统应包括哪几个组成部分?并画出DAS的基本组成框图。
答:一个典型的数据采集系统应该包括以下几部分⑴传感器⑵信号调理电路⑶多路模拟开关⑷采样保持电路⑸A/D转换电路⑹计算机及数据输出设备DAS的基本组成框图如下2.简述什么是馈送以及减小馈送的方法。
答:在S/H处于保持状态时保持电容C H上的电压应与输入电压V i变化无关。
但实际上由于断开的开关S存在着分布电容C S,输入电压V i的交流分量将通过C S加到C H上,这就是馈送。
增大保持电容C H有利于减小馈送。
3.多路模拟开关主要分为哪两种类型?每种类型多路开关的特点是什么?答:多路模拟开关主要分为电气机械式的开关和半导体式的开关。
电气机械式开关的特点:体积大、换线速度慢、导通电阻小、断开电阻大、无漏电流;半导体式开关的特点:体积小、重量轻、动作速度快、导通电阻大、断开有漏电流。
4.简述A/D 转换器在双极性使用时应如何调整零点和满度? 答:调零时:输入电压∆+-=2121FS in V V ,输出在000…00~000…01之间跳变。
调满度时:∆-=2321FS in V V ,输出在111…10~111…01之间跳变。
5.简述两种I/O 寻址方式的优点。
答:隔离I/O 寻址方式的优点是:不占用内存空间,程序中很容易区分哪些是输入、输出操作;用于I/O 寻址的地址线少,所以译码电路简单;I/O 指令格式短,执行时间短;内存映象I/O 寻址方式的优点是:所有访问内存的指令都可以用来处理输入输出,对外设中的数据可直接进行操作,不需要专门的I/O 指令,编程比较灵活,寻址的控制逻辑也比较简单。
6.什么是D/A 转换器?完备的DAC 包括哪几部分?答:D/A 转换器是将数字量转换成与之对应的模拟量(电流或电压)的器件。
完备的DAC 包括:(1)电阻开关网络;(2)参考电压源;(3)数字接口;(4)输出放大器。
三、16路多路模拟开关AD7506有以下特性参数:R ON =400Ω C I =5pFC OT =400pF I R =1nA现设C L =50pF ,R L =10M Ω。
试求:(1)若导通信道的信号源内阻R S =1K Ω,估算由于泄漏和负载效应引起的直流误差。
(2)达到精度为0.1%的设定时间是多少?解:(1)由于R L >>R on +R S所以 由于泄漏引起的支流误差E OE =(n-1)I R (R on +R S )=(16-1)×10-9(1000+400)=21μV负载效应误差=(R S +R on )/ (R S +R on +R L ) ×100%=0.014%。
(2)因为R S ≈R on ,C I <<C T所以 T C =(R S +R on )C T =(R S +R on )(C OT +C L )设定时间 t S =T C ln(100/%误差)= (R S +R on )(C OT +C L )ln(100/0.1)=(1000+400)(400×10-12+50×10-12)ln1000=4.35μs 。
四、设四个8路模拟开关构成32路输入通道。
已知模拟开关断开时漏电流I R =1.0nA ,开关导通电阻R on =100Ω,信号源内阻R S =1K Ω,负载电阻R L =15M Ω,求:⑴漏电流及引起的输出误差电压是多少?⑵若采用分层组合电路,漏电及引起的输出误差电压又是多少?解:(1)漏电流I=(4n-1)I R =(4×8-1) ×1.2= (32-1) ×1 =31nA由于R L >>R on +R S输出误差电压E OE =I (R on +R S )=31nA ×(1000+100)Ω=34.1μV 。
(2)漏电流I=(n+1)I R =(8+1) ×1 =9nA输出误差电压E OE =I (R on +R S )=9nA ×(1000+100)Ω=9.9μV 。
五、某A/D ,n=12,V FS =20V ,双极性应用,测温度,温度范围为-100C o ~100C o,对应传感器的输出为-10V~10V ,求A/D 转换后得到的D 1=0FFH 和D 2=FF0H 输出码对应的温度大小分别是多少? 解:(1)求i V V V D V FFH D n FS n 755.8220)2048151615(2)2(0121111-≈⨯-+⨯=⋅-=→=- V V D V H FF D n FS n 922.9220)2048161525615(2)2(0121222-≈⨯-⨯+⨯=⋅-=→=- (2)确定温度与电压的关系i V T 10=(3)确定相应的温度C V T o 55.87)755.8(101011-=-⨯==C V T o 22.99922.9101022=⨯==1. 某A/D ,0~10V 量程,n=12 ,单极性输入,测压力,压力范围0~350Kpa ,求A/D 的数字量为0及1所代表的压力为多大?解:(1)D 1=C80H=12×256+8×16=3200D 2=00FH=15所以:V 1=D 1V FS /212=3200×10/4096=7.8125VV 2=D 2V FS /212=15×10/4096=0.0366V(2)P:0~350KPa ,V i =0~10V →P=35V i(3)P1=35V 1=35×7.8125=273.4KPaP2=35V 2=35×0.0366=1.2814KPa七、16路模拟开关AD7506有以下特性参数:R on =400Ω C I =5pFC OT =400pF I R =1nA现设C L =50pF ,R L =10M Ω,信号源内阻R S =1K Ω。
求开关闭合时的带宽。
解:由于R S ≈R on ,C I <<C T所以,开关闭合时的带宽f 3db =1/(2π(R S +R on )C T )=1/(2π(1000+400)(400+50)×10-12)≈252.6KHz 。
八、某A/D ,0~10V 量程,单极性测压力,对应的压力范围为0 ~500MPa ,求A/D 转换后得到 0及0输出码所代表的压力大小分别是多少?解:(1)求i VV V D V H E D n FS789.8210)16125614(21012111≈⨯⨯+⨯=⋅=→=V V D V H D n FS957.0210)81682561(218812222≈⨯+⨯+⨯=⋅=→=(2)确定压力与电压的关系i V P 50=(3)确定相应的压力MPa V P 45.439789.8505011=⨯==MPa V P 85.47957.0505022=⨯==九、设有一个反相放大器的输入电阻R 2为20K Ω,反馈电阻R 1为40 K Ω, V OS =1mV,试计算: ⑴闭环增益K ;⑵闭环时的输入阻抗;⑶由V OS 引起的输出失调ΔV O ;⑷如果加补偿电阻R C 其值是多少?解:(1)闭环增益K=-R 1/R 2=-40/20=-2(2)输入阻抗R in=R2=20 KΩ(3)由V OS引起的输出失调ΔV O=-(1+R1/R2)V OS=-(1+40/20) ×1mV=-3mV(4) R c=R1//R2=40//20=(40×20)/(40+20)≈13.33 KΩ十、设计一个电平转换电路,把0~10V转变成-5~5V,用运算放大器实现。
解:实现电路图如下:分析:Vo’=-[R/R(0~10V)+R/R(-5V)]=5~-5VVo=-R/R Vo’=-5~5V十一、某VFC输出频率范围是:0—100KHz,用其构成A/D转换器,在其满度输入时,计数器的计10,求A/D的转换时间,同时求该A/D具有相当于多少位字长的分辨率?数值为4解:由题意:104=N=fT→T=N/f=104/(100×103)=0.1s所以A/D的转换时间为0.1s。