SEW伺服程序下载步骤
LENZE9300伦茨伺服器参数上传下载教程

1.0 目的:通过介绍可以对伦茨伺服器参数进行上传和下载。
2.0 要下载伦茨伺服器参数,必须先安装伦茨软件GDC。
这里介绍适合我们公司使用的2种连接下载方式。
2.1 这是伦茨软件安装好后打开的样子。
(公司内有一张伦茨软件正版光盘并有序列号)3.0 第一种连接下载方式:采用了“Ethernet CAN 2180”转换器进行连接,连接到中控的服务器电脑上3.1在三楼服务器中退出WINCC,就可以看见桌面上的“GDC图标”进入后在接设置里选择(如已经设置好连接方式,这个步骤可跳过)3.2 当该设定完成后,按F2键或,则会根据选定端口类型出现以下的Search drives 对话框;在此你可以点击Search选择寻找控制器;或点击Offline进入离线状态。
如果你之前的设置都正确的话,你将找到伺服器,并可以在线连接。
连接好后就可以进行参数的读取,上传,下载。
需注意的是,新伺服器的地址为1,通过参数C0350修改。
3.3 这里是对应的热键和热键的作用说明:我们普通使用时只要用到在线,离线,F5(下载),F7(上载)。
3.4 这时候他会自动寻找,寻找到3个地址,3,6,9。
你可以选择其中一个进入。
3和6是纵向的2台伺服器,9是横向的一台伺服器。
你可以通过内的“Communication parameter”进行修改地址,并进行再次读取。
3.5 你也可以在“Drive parameters”内选择这个选项是将原来做好的参数备份读取出来。
服务器中,参数备份路径分别为1线:F:\beifen1xian 2线:F:\beifen2xian 3线:F:\lunci3xianbeifen根据路径选择备份的程序按OK打开备份的程序3.6 当你找到合适的参数后,想将参数写入伺服器,就可以选择“Drive parameters”内选择这时候就可以将参数写入了。
3.7+ 这时它会提示你:写入参数后伺服器重新启动。
这时候,伺服器就可以正常使用了。
SEW MOVIDRIVE MDX61B调试步骤同步伺服(binary setpoint)

9、选择“Execute complete start-up(执行完整的初始化)”;
10、选择“Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量 控制/伺服电机)”;
11、参照电机铭牌,检查电机及编码器信息是否准确;
12、检查电机类型信息;
47、可选择“project > save(as)”,保存项目;
48、可选择“project > export”,导出项目到压缩文件;
49、若后期设备应用有更改,需初始化控制器,可在“parameter tree”P802中选择“delivery state”,将控制器还原为出厂状态。
4、定义硬件名称,点击“finish”开始硬件配置;
5、硬件配置中;
6、硬件配置完成后,去除控制器X13/DIΦΦ“控制器禁止”端子的二进 制输入,然后点击“startup”;
7、点击“perform startup”,开始初始化;
8、点击“startup set-1”,进行parameter set-1设置( 如果需要两套参数 运行,parameter set-2设置采取同样步骤);
SEW MOVIDRIVE MDX61B调试步骤
(binary setpoint)
WEISS-CHINA
2014/05
1、打开MOVITOOLS MotionStudio软件,创建项目;
2、用USB11A连接电脑和MDX61B控制器的XT插槽,扫描网络上的设备;
3、选择“configure device”,对连接到的设备进行硬件配置;
21、点击“完成”,将初始化信息下载至控制器。如需配置parameter set-2,点击“download”,再进行参数包示框,点击“确定”;
SEW伺服电机IPOS典型控制程序

/**************************************************************************** --------------------------------10.18.01 D.Broerman Copied from Version 5 of Rack Stacker Software08.01.02 D.Broerman Added Position_6a to control the Vaccum Cup extend position 10.08.02 D.Broerman V04 Added sequence to Load from Rack31.01.03 St. Reuter V05 Communication via Device Net17.04.03 IBB China CSG Pos.13Necessary Parameters:--------------------------Operating Mode = VFC-n-Reg. & IPOSParameter P700Parameter P100 Sollwertquelle = FeldbusParameter P101 Steuerquelle = FeldbusBinary Inputs Base UnitDI00 EnableP600 DI01 Release/Rapid StopP601 DI02 High Speed Input 1P602 DI03 High Speed Input 2P603 DI04 SpareP604 DI05 SpareaaaBinary Option Card 1P610 DI10 IPOS Input (Vacuum Cup Extended Prox)P611 DI11 IPOS Input (V acuum Cup Retracted Prox)P612 DI12 IPOS Input (Vacuum Switch)P613 DI13 IPOS Input (Spare)P614 DI14 IPOS Input (Spare)P615 DI15 IPOS Input (Spare)P616 DI16 IPOS Input (Spare)P617 DI17 IPOS Input (Spare)Binary Inputs IPOS Inputs PA 1 (Device Net)DI20 IPOS Input (Start Cycle Signal Stacking)DI21 IPOS Input (Stop Cycle Signal)DI22 IPOS Input (MotorRight/ Halt, Arm Up Hand)DI23 IPOS Input (MotorLeft/ Halt, Arm Down Hand)DI24 IPOS Input (Vacuum Man Mode)DI25 IPOS Input (Release Man Mode)DI26 IPOS Input (Vacuum Cup In/Out Man Mode)DI27 IPOS Input (Stacker Mode)(Automatic = 1)(ManualMode = 0)DI30 IPOS Input (Loading Cycle Start)DI31 IPOS Input (Start Rack Reference)DI32 SpareDI33 SpareDI34 SpareDI35 SpareDI36 SpareDI37 SpareBinary Outputs Base UnitDB00 Configured with BrakeP620 DO01 Drive ReadyP621 DO02 Drive FaultBinary Output Option Card 1P630 DO10 IPOS Output (Arm Down)P631 DO11 IPOS Output (Conv Release In Transport)P632 DO12 IPOS Output (Stacker Fault)P633 DO13 IPOS Output (Basic Position)P634 DO14 IPOS Output (Conv Release Out Transport)P635 DO15 IPOS Output (Vacuum Cup Extended)P636 DO16 IPOS Output (Rack Reference Position)P637 DO17 IPOS Output (Vacuum Fault)Output Option Card 2DO20 IPOS Output (Vacuum Cup Extend Sol)DO21 IPOS Output (Vacuum Cup Retract Sol)DO22 IPOS Output (Vacuum On Sol)D023 IPOS Output (Vacuum Off Sol)DO24 IPOS Output (Blow Off On)DO25 IPOS Output (Spare)DO26 IPOS Output (Spare)DO27 IPOS Output (Spare)P941 IPOS Geberquelle = Motor Encoder on Terminal X15Anwenderprogramm mit folgenden Funktionen :-------------------------------------------1)Allgemeiner ManualMode eines positioniergeregelten Antriebs.- 黚er zwei Eingangsklemmen kann der Antrieb mit einer festenGeschwindigkeit in beide Richtungen gefahren werden.- Die Lageregelung ist dabei aktiv.- Eine vorherige Referenzfahrt ist nicht notwendig.2)Betriebsart Automatic****************************************************************************/#include <const.h>#include <io.h>//================= Fahr Variables ===========================================#pragma globals 200 250long V_MotorRight, V_MotorLeft;//================= Ziel Position - Variables ==============================#define Position_0 H0#define Position_1 H1#define Position_2 H2#define Position_3 H3#define Position_4 H4#define Position_5 H5#define Position_6 H6#define Position_7 H7#define Position_8 H8#define Position_9 H9#define Position_10 H10#define Ref_Pos H11#define Position_6a H12#define Auto_Speed_0 H20#define Auto_Speed_1 H21#define Auto_Speed_2 H22#define Ref_Speed_0 H23#define Auto_Speed_3 H24#define Man_Speed_0 H25#define Auto_Speed_4 H26#define Auto_Speed_5 H27#define Auto_Speed_6 H28#define Position_Window H30#define M_State H31#define M_Fault H32#define M_Merker H33#define Pos_0 H35#define M_Loading H36#define M_Stacking H37#define Load_Pos_0 H40#define Load_Pos_1 H41#define Load_Pos_2 H42#define Load_Pos_3 H43#define Load_Pos_4 H44#define Load_Pos_5 H45#define Load_Pos_6 H46#define Load_Pos_7 H47#define Load_Pos_8 H48#define Load_Pos_9 H49#define Load_Pos_10 H50#define Load_Pos_11 H51#define Load_Pos_12 H52#define Load_Pos_6a H53#define Bustyp H100#define Le_PA_DATA H101#define PA1 H102#define PA2 H103#define PA3 H104#define Le_PE_DA TA H110#define PE1 H111#define PE2 H112#define PE3 H113//================= INPUTS ========================================= //Onboard Inputs#define E_DriveEnable DI00#define E_DriveRel DI01#define E_Touchp_1 DI02#define E_Touchp_2 DI03#define E_Spare_1 DI04#define E_Spare_2 DI05//Inputs Card DIO 11A#define E_CupExtendedProx DI10#define E_CupRetractedProx DI11#define E_VacuumSwitch DI12#define E_Spare_3 DI13#define E_Spare_4 DI14#define E_Spare_5 DI15#define E_Spare_6 DI16#define E_Spare_7 DI17//Inputs Field Bus#define E_Start_Cycle ((PA1 & 0b1)!=0)#define E_Stop_Cycle ((PA1 & 0b10)!=0)#define E_ArmRight ((PA1 & 0b100)!=0)#define E_ArmLeft ((PA1 & 0b1000)!=0)#define E_VacManMode ((PA1 & 0b10000)!=0)#define E_RelManMode ((PA1 & 0b100000)!=0)#define E_CupInOutManMode ((PA1 & 0b1000000)!=0)#define E_AutoMode ((PA1 & 0b10000000)!=0)#define E_LoadCycleStart ((PA1 & 0b100000000)!=0)#define E_ReferenceRack ((PA1 & 0b1000000000)!=0)#define E_Continue_Cycle ((PA1 & 0b10000000000)!=0)#define E_Reset_Cycle ((PA1 & 0b100000000000)!=0)#define E_Resume_Cycle ((PA1 & 0b1000000000000)!=0)#define E_Vacuum_On_Auto ((PA1 & 0b10000000000000)!=0)//================= OUTPUTS =========================================//Onboard Outputs#define A_DriveReady DO01#define A_DriveFault DO02//Outputs Card DIO 11A#define A_CupExtendSol 0 //DO20#define A_CupRetractSol 1 //DO21#define A_VacuumOnSol 2 //DO22#define A_VacuumOffSol 3 //DO23#define A_BlowOffSol 4 //DO24//Outputs Fieldbus#define PE1_Output PE1#define A_StackerArmDown 0#define A_ConvRel 1 //((PE1 & 0b10)!=0)#define A_StackerFault 2 //((PE1 & 0b100)!=0)#define A_HomePosition 3 //((PE1 & 0b1000)!=0)#define A_ConvRelOut 4 //((PE1 & 0b10000)!=0)#define A_CupExtendSwitch 5 //((PE1 & 0b100000)!=0)#define A_ArmReferencePos 6 //((PE1 & 0b1000000)!=0)#define A_VacuumFault 7 //((PE1 & 0b10000000)!=0)#define A_ArmProbePos 8 //((PE1 & 0b100000000)!=0)#define A_CupRetractSwitch 9 //((PE1 & 0b1000000000)!=0)#define A_VacuumConfirm 10 //((PE1 & 0b10000000000)!=0)#define A_RelCrosstrREV 11 //((PE1 & 0b100000000000)!=0)//================= Festwerte ===============================================#pragma list/*==================================================================== =======Subroutines====================================================================== =====*//*================================================Subroutine for Initializing the System.==================================================*/Initialize(){_AxisStop( AS_RSTOP );OptOutpIPOS = 0; // all Outputs OffControlWord = 0; // IPOS Control Word OffPos_0 = 1000;Auto_Speed_0 = 15000; // Touch Probe SearchingAuto_Speed_1 = 19500; // Drive Down StackingAuto_Speed_2 = 5000;Auto_Speed_3 = 10000;Auto_Speed_4 = 15000; // Drive UP StackingAuto_Speed_5 = 1500; // Med Peel off speedAuto_Speed_6 = 100; // Slow Peel off speedRef_Speed_0 = 29000;Man_Speed_0 = 5000;Position_1 = 250000;M_State = 0;M_Fault = 0;M_Loading = 0;M_Stacking = 0;Bustyp = 3; //Value 3 = FieldbusLe_PA_DATA = 3; //Value 3 = Rrocess Input WordsLe_PE_DATA = 3; //Value 3 = Rrocess Output Words}// End Initialize()/*================================================= Interrupt Subroutine=================================================*/ Interrupt(){_TouchProbe( TP_DIS1 );M_State = 4 ;Position_2 = H507;Position_3 = H507 + 10000; // Vacuum On 10000 Position_4 = H507 + 345834; // 345834 Position_5 = H507 + 140000; // Vac Cups Ret 200000 Position_6 = H507 + 320000; // Slow Speed 400000 Position_6a = H507 + 363000; // Vac Cup Ext 411000 Position_7 = H507 + 421000; // Vac Rel vorher 250000 // 425000 Position_8 = H507 + 438000; // Blow-off off 438000 Position_9 = H507 + 850000; // Conv Rel 850000 Position_10 = H507 + 870000; // 870000Ref_Pos = H507 + 415000; // 275000 Load_Pos_0 = H507 -10000;Load_Pos_1 = H507 + 80000; // Vac Cups RetLoad_Pos_2 = H507 + 200000; // Slow SpeedLoad_Pos_3 = H507 + 230000; // Vac Cups Ext Vac OnLoad_Pos_4 = H507 + 280000; //Load_Pos_5 = H507 + 250000; // Ret Vac CupLoad_Pos_6 = H507 + 248000; // Low SpeedLoad_Pos_6a = H507 + 220000; // Med SpeedLoad_Pos_7 = H507 + 185000; // Hi Speed Ext Vac CupLoad_Pos_8 = H507 + 70000; // Low SpeedLoad_Pos_9 = H507 + 40000; // Vac RelLoad_Pos_10 = H507 + 2000; // Conv Relreturn;} // End Interrupt()/***************************************************************** Cycling Subroutine.******************************************************************/ Cycling(){if (!E_DriveRel){M_State = 0;_BitClear (PE1_Output, A_ArmProbePos );_BitClear (PE1_Output, A_ArmReferencePos);_AxisStop(AS_RSTOP);TargetPos = SetpointPos;}}// End Cycling/***************************************************************** Manual Mode Subroutine******************************************************************/ ManualMode(){// Stacker Arm Up and Downif(E_ArmRight || E_ArmLeft ){_AxisStop( AS_ENABLE );V_MotorRight = V_MotorLeft = Man_Speed_0;_SetSys (SS_POSSPEED, V_MotorRight);if (E_ArmRight && (!E_ArmLeft)) // Klemmen abfragen_GoAbs(GO_NOW AIT, (ActPos_Mot + 409600));if (E_ArmLeft && (!E_ArmRight))_GoAbs(GO_NOW AIT, (ActPos_Mot - 409600));}if(!E_ArmRight && !E_ArmLeft ){_AxisStop( AS_RSTOP );TargetPos = SetpointPos;}// Vacuum and Releaseif (E_VacManMode){_BitSet(OptOutpIPOS, A_VacuumOnSol);_BitClear (OptOutpIPOS, A_VacuumOffSol);}if (E_RelManMode && !E_VacManMode){_BitSet(OptOutpIPOS, A_VacuumOffSol);_BitSet(OptOutpIPOS, A_BlowOffSol);_BitClear (OptOutpIPOS, A_VacuumOnSol);}else{_BitClear (OptOutpIPOS, A_BlowOffSol);}// Vacuum Cup In Out Sequenceif (E_CupInOutManMode && E_CupExtendedProx && !(M_Merker && Bit_0)) {_BitSet(OptOutpIPOS, A_CupRetractSol);_BitClear (OptOutpIPOS, A_CupExtendSol);_BitSet (M_Merker, Bit_0);}if (E_CupInOutManMode && !E_CupExtendedProx && !(M_Merker && Bit_0)) {_BitClear(OptOutpIPOS, A_CupRetractSol);_BitSet (OptOutpIPOS, A_CupExtendSol);_BitSet (M_Merker, Bit_0);}if (!E_CupInOutManMode)_BitClear (M_Merker, Bit_0);/*if (E_CupExtendedProx){_BitClear (OptOutpIPOS, A_CupExtendSol);}if (E_CupRetractedProx){_BitClear (OptOutpIPOS, A_CupRetractSol);}*/} // End ManualMode()/*================================================Automatic Mode Subroutine==================================================*/AutomaticMode(){// Scope474 = StatusWord; // only for testingif (E_Start_Cycle && !E_Stop_Cycle && E_Touchp_1 && E_DriveEnable && E_DriveRel && (M_State == 0) && (M_Fault == 0 )){_BitClear (PE1_Output, A_ConvRel);_BitSet (OptOutpIPOS, A_CupExtendSol);_BitClear(OptOutpIPOS, A_CupRetractSol);M_State = 1 ;M_Stacking = 1 ;M_Loading = 0 ;}if (E_LoadCycleStart && !E_Stop_Cycle && E_Touchp_1 && E_DriveEnable && E_DriveRel&& (M_State == 0) && (M_Fault == 0 )){_BitClear (PE1_Output, A_ConvRel);M_State = 1 ;M_Stacking = 0 ;M_Loading = 1 ;}if (E_Stop_Cycle){M_State = 0 ;M_Fault = 0 ;_AxisStop( AS_RSTOP );_TouchProbe( TP_DIS1 );_BitClear (PE1_Output, A_ArmReferencePos);_BitClear (PE1_Output, A_ArmProbePos);_BitClear (OptOutpIPOS, A_CupExtendSol);_BitClear (OptOutpIPOS, A_CupRetractSol);}switch (M_State){case 1:_SetSys( SS_ACTPOS, Pos_0 );_BitSet(H484,1);_Wait(2);ActPos_Mot = 0;TargetPos = 0;_Wait(2);_BitClear(H484,1);_TouchProbe( TP_EN1 );V_MotorRight = V_MotorLeft = Auto_Speed_0;_SetSys (SS_POSSPEED, V_MotorRight);_GoAbs (GO_NOW AIT, Position_1);M_State = 2 ;break ;case 2: //Check Drive Stopped, Start Position not Found if (StatusWord & Bit_19){( M_State = 3 );}break ;case 3: //Start Position Not Found _AxisStop( AS_RSTOP );_BitSet(PE1_Output, A_StackerFault);_TouchProbe( TP_DIS1 );M_State = 0 ;M_Fault = 1 ;break ;case 4: // Start Position Found if (!E_ReferenceRack){M_State = 5 ;}else{M_State = 8 ;}break ;case 5: // Move to Rack Reference Position V_MotorRight = V_MotorLeft = Auto_Speed_1;_SetSys (SS_POSSPEED, V_MotorRight);_GoAbs (GO_NOW AIT, Ref_Pos); // Rack Reference PositionM_State = 6 ;break ;case 6: // Release Rack Reference Motion (ge鋘dert: Stadelmeierif ((StatusWord & Bit_19) && E_CupExtendedProx) // 15.09.03){M_State = 7 ;_BitSet(PE1_Output, A_ArmReferencePos);_BitSet(PE1_Output, A_ArmProbePos);}break ;case 7:if (E_Continue_Cycle){if (!E_ReferenceRack && (M_Stacking == 1)){_BitClear (OptOutpIPOS, A_VacuumOnSol);_BitSet (OptOutpIPOS, A_VacuumOffSol);_BitSet(OptOutpIPOS, A_BlowOffSol);_Wait(500);_BitClear (PE1_Output, A_ArmReferencePos);_BitClear (PE1_Output, A_ArmProbePos);M_State = 8 ;}}else if (M_Loading == 1){_Wait(500);_BitClear (PE1_Output, A_ArmReferencePos);_BitClear (PE1_Output, A_ArmProbePos);if (!E_VacuumSwitch){M_State = 8 ;_BitSet(PE1_Output, A_VacuumFault);}else{M_State = 8 ;}}break ;case 8: // move to End Positionif (M_Stacking == 1){V_MotorRight = V_MotorLeft = Auto_Speed_4; //*******_SetSys (SS_POSSPEED, V_MotorRight);_GoAbs (GO_NOW AIT, Position_10); //End PositionM_State = 9 ;}else if (M_Loading == 1){V_MotorRight = V_MotorLeft = Auto_Speed_5; //*******_SetSys (SS_POSSPEED, V_MotorRight);_GoAbs (GO_NOW AIT, Load_Pos_0); //End PositionM_State = 9 ;}break ;case 9:if (StatusWord & Bit_19) // in Position{( M_State = 0 );}break ;}} // End AutomaticMode()/*================================================Task2 Program PositionStateMachine.Hier werden die binary Output zur R點kmeldungder Istposition gesetzt.=================================================*/ PositionStateMachine(){if (E_AutoMode && (M_State >= 5) && (M_Stacking == 1)) // Stacking Active {if ((ActPos_Mot > Position_3) && (ActPos_Mot <= Position_4)){_BitClear (OptOutpIPOS, A_VacuumOffSol); // Vac On_BitSet(OptOutpIPOS, A_VacuumOnSol);}if ((ActPos_Mot > Position_4) && (ActPos_Mot <= Position_5)){}if ((ActPos_Mot > Position_5) && (ActPos_Mot <= Position_6)){/* _BitClear (OptOutpIPOS, A_CupExtendSol); // Vac Cup Ret*//* _BitSet(OptOutpIPOS, A_CupRetractSol);*/}if ((ActPos_Mot > Position_6) && (ActPos_Mot <= Position_7)){V_MotorRight = V_MotorLeft = Auto_Speed_2; // Slow Speed_SetSys (SS_POSSPEED, V_MotorRight);if (A_CupExtendSol && (!E_VacuumSwitch)) // Check Vac Switch_BitSet(PE1_Output, A_VacuumFault);}if ((ActPos_Mot > Position_6a) && (ActPos_Mot <= Position_7)) {/* _BitClear (OptOutpIPOS, A_CupRetractSol); // Vac Cup Ext*//* _BitSet(OptOutpIPOS, A_CupExtendSol);*/_BitClear (OptOutpIPOS, A_CupExtendSol);}if ((ActPos_Mot > Position_7) && (ActPos_Mot <= Position_8)){if ((M_State >= 8)){_BitClear (OptOutpIPOS, A_VacuumOnSol); // Vac Rel_BitSet (OptOutpIPOS, A_VacuumOffSol);_BitSet (OptOutpIPOS, A_BlowOffSol);}}if ((ActPos_Mot > Position_8) && (ActPos_Mot <= Position_9)){_BitClear (OptOutpIPOS, A_VacuumOffSol); // Blow-Off Off_BitClear(OptOutpIPOS, A_CupExtendSol);V_MotorRight = V_MotorLeft = Auto_Speed_1;_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Position_9) && (ActPos_Mot <= Position_10)){_BitClear (OptOutpIPOS, A_BlowOffSol);_BitSet (PE1_Output, A_ConvRel); // Conv Release_BitClear (OptOutpIPOS, A_CupExtendSol);_BitSet(OptOutpIPOS, A_CupRetractSol);}} // End Stacking Activeif (E_AutoMode && (M_State == 6) && (M_Loading == 1)) // Loading Active{if ((ActPos_Mot > Load_Pos_1) && (ActPos_Mot <= Load_Pos_2)){_BitClear (OptOutpIPOS, A_CupExtendSol); // Vac Cup Ret_BitSet(OptOutpIPOS, A_CupRetractSol);}if ((ActPos_Mot > Load_Pos_2) && (ActPos_Mot <= Load_Pos_3)){// V_MotorRight = V_MotorLeft = Auto_Speed_2; // Slow Speed// _SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_3) && (ActPos_Mot <= Load_Pos_4)){_BitClear(OptOutpIPOS, A_CupRetractSol);_BitSet (OptOutpIPOS, A_CupExtendSol); // Vac Cup Ext_BitClear (OptOutpIPOS, A_VacuumOffSol); // Vac On_BitSet(OptOutpIPOS, A_VacuumOnSol);}} // End Loading Up Activeif (E_AutoMode && (M_State == 9) && (M_Loading == 1)) // Loading Down{if ((ActPos_Mot > Load_Pos_6) && (ActPos_Mot <= Load_Pos_5)){_BitClear(OptOutpIPOS, A_CupExtendSol);_BitSet (OptOutpIPOS, A_CupRetractSol); // Vac Cup RetV_MotorRight = V_MotorLeft = Auto_Speed_6; // Low Speed_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_6a) && (ActPos_Mot <= Load_Pos_6)){V_MotorRight = V_MotorLeft = Auto_Speed_2; // Med Speed*******************************_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_7) && (ActPos_Mot <= Load_Pos_6a)){V_MotorRight = V_MotorLeft = Auto_Speed_4; // Hi Speed *******************************_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_8) && (ActPos_Mot <= Load_Pos_7)){V_MotorRight = V_MotorLeft = Auto_Speed_4; // Hi Speed_SetSys (SS_POSSPEED, V_MotorRight);_BitClear(OptOutpIPOS, A_CupRetractSol);_BitSet (OptOutpIPOS, A_CupExtendSol); // Vac Cup Ext}if ((ActPos_Mot > Load_Pos_9) && (ActPos_Mot <= Load_Pos_8)){V_MotorRight = V_MotorLeft = Auto_Speed_2; // Slow Speed_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_10) && (ActPos_Mot <= Load_Pos_9)){_BitClear (OptOutpIPOS, A_VacuumOnSol); // Vac Rel_BitSet (OptOutpIPOS, A_VacuumOffSol);_BitSet(OptOutpIPOS, A_BlowOffSol);}if ((ActPos_Mot <= Load_Pos_10)){_BitClear (OptOutpIPOS, A_VacuumOffSol); // Blow Off Off_BitClear(OptOutpIPOS, A_CupExtendSol);_BitClear (OptOutpIPOS, A_BlowOffSol);_BitSet(OptOutpIPOS, A_CupRetractSol);_BitSet (PE1_Output, A_ConvRel); // Conv Rel}} // End Loading Activeif ( E_Touchp_1 ) // Arm Down Signal {_BitSet (PE1_Output, A_StackerArmDown);_BitClear(PE1_Output, A_VacuumFault); // Reset Vacuum Fault}else{_BitClear (PE1_Output, A_StackerArmDown);}if ( E_CupExtendedProx ) // Cup Extended Signal {_BitSet (PE1_Output, A_CupExtendSwitch);}else{_BitClear (PE1_Output, A_CupExtendSwitch);}//Signal VacuumCups retract Switch => SPSif ( E_CupRetractedProx ){_BitSet(PE1_Output, A_CupRetractSwitch);}else{_BitClear(PE1_Output, A_CupRetractSwitch);}if ( E_VacuumSwitch ) // Vacuum Confirm Signal {_BitSet (PE1_Output, A_VacuumConfirm);}else{_BitClear (PE1_Output, A_VacuumConfirm);}Cycling ();} // End PositionStateMachine()/*=============================================Main Program (IPOS-Eintrittsfunktion)===============================================*/main(){/*-------------------------------------Initialization--------------------------------------*/Initialize();_SetInterrupt( SI_TOUCHP1, Interrupt);_SetTask2(T2_START, PositionStateMachine);/*-------------------------------------Main Program--------------------------------------*/while(1){_GetSys (Bustyp, GS_PODATA); //PA-Data from Field Bus in Var.H102-H104if (!E_AutoMode){M_Fault = 0;M_State = 0;_BitClear (PE1_Output, A_StackerFault);_BitClear (PE1_Output, A_ArmReferencePos);_BitClear (PE1_Output, A_ArmProbePos);_TouchProbe( TP_DIS1 );ManualMode();}if (E_AutoMode){AutomaticMode();}if (E_AutoMode && !E_Stop_Cycle && !E_V acuumSwitch && (M_State == 0) && (M_Fault == 0 )){/* _BitClear (OptOutpIPOS, A_CupExtendSol);_BitSet(OptOutpIPOS, A_CupRetractSol);*/}_SetSys (SS_PIDA TA, Le_PE_DA TA); //Variablen H111-113 as PE-Data back to Fieldbus}}。
sew调试步骤自己总结

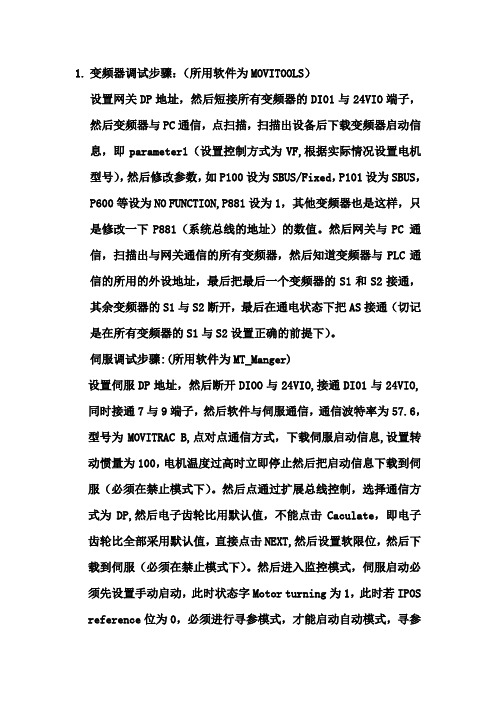
1.2.肈变频器调试步骤:(所用软件为MOVITOOLS)蕿设置网关DP地址,然后短接所有变频器的DI01与24VIO端子,然后变频器与PC通信,点扫描,扫描出设备后下载变频器启动信息,即parameter1(设置控制方式为VF,根据实际情况设置电机型号),然后修改参数,如P100设为SBUS/Fixed,P101设为SBUS,P600等设为NOFUNCTION,P881设为1,其他变频器也是这样,只是修改一下P881(系统总线的地址)的数值。
然后网关与PC通信,扫描出与网关通信的所有变频器,然后知道变频器与PLC通信的所用的外设地址,最后把最后一个变频器的S1和S2接通,其余变频器的S1与S2断开,最后在通电状态下把AS接通(切记是在所有变频器的S1与S2设置正确的前提下)。
螃伺服调试步骤:(所用软件为MT_Manger)蚁设置伺服DP地址,然后断开DIOO与24VIO,接通DI01与24VIO,同时接通7与9端子,然后软件与伺服通信,通信波特率为57.6,型号为MOVITRACB,点对点通信方式,下载伺服启动信息,设置转动惯量为100,电机温度过高时立即停止然后把启动信息下载到伺服(必须在禁止模式下)。
然后点通过扩展总线控制,选择通信方式为DP,然后电子齿轮比用默认值,不能点击Caculate,即电子齿轮比全部采用默认值,直接点击NEXT,然后设置软限位,然后下载到伺服(必须在禁止模式下)。
然后进入监控模式,伺服启动必须先设置手动启动,此时状态字Motorturning 为1,此时若IPOSreference位为0,必须进行寻参模式,才能启动自动模式,寻参模式启动方法如下:寻参:螀1.设置P902的参数,确定寻参类型为0,然后在控制模式下通过PC发控制字以及0转速给伺服,即启动寻参,寻参原位信号通过端子DI03(端子功能为ReferenceTravel)传入,为1时减速,脱离时停止,同时将当前位置清零,此时IPOSreference位为1。
西门子V90伺服驱动器参数下载步骤
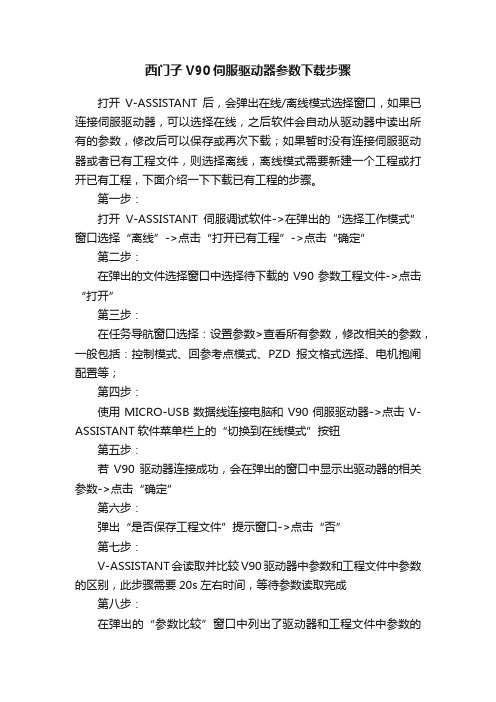
西门子V90伺服驱动器参数下载步骤
打开V-ASSISTANT后,会弹出在线/离线模式选择窗口,如果已连接伺服驱动器,可以选择在线,之后软件会自动从驱动器中读出所有的参数,修改后可以保存或再次下载;如果暂时没有连接伺服驱动器或者已有工程文件,则选择离线,离线模式需要新建一个工程或打开已有工程,下面介绍一下下载已有工程的步骤。
第一步:
打开V-ASSISTANT伺服调试软件->在弹出的“选择工作模式”窗口选择“离线”->点击“打开已有工程”->点击“确定”
第二步:
在弹出的文件选择窗口中选择待下载的V90参数工程文件->点击“打开”
第三步:
在任务导航窗口选择:设置参数>查看所有参数,修改相关的参数,一般包括:控制模式、回参考点模式、PZD报文格式选择、电机抱闸配置等;
第四步:
使用MICRO-USB数据线连接电脑和V90伺服驱动器->点击V-ASSISTANT软件菜单栏上的“切换到在线模式”按钮
第五步:
若V90驱动器连接成功,会在弹出的窗口中显示出驱动器的相关参数->点击“确定”
第六步:
弹出“是否保存工程文件”提示窗口->点击“否”
第七步:
V-ASSISTANT会读取并比较V90驱动器中参数和工程文件中参数的区别,此步骤需要20s左右时间,等待参数读取完成
第八步:
在弹出的“参数比较”窗口中列出了驱动器和工程文件中参数的
区别,由于我们是要将工程文件下载到驱动器中,所以点击“电脑到驱动”,等待下载完成
第九步:
点击V-ASSISTANT软件菜单栏上的“保存参数到ROM”按钮,等待操作完成,至此V90伺服驱动器的参数下载已完成。
SEW软件使用方法资料

SEW软件使用方法资料SEW软件是一种用于工程领域的设计和仿真软件,主要用于机械系统、电气系统和液压系统的设计和分析。
本文将介绍SEW软件的使用方法,并包含以下主题:软件安装、新建项目、绘制图纸、添加元件、仿真分析和结果导出。
以下是详细的使用指南。
1.软件安装2.新建项目打开软件后,点击“文件”选项卡,在下拉菜单中选择“新建项目”。
在弹出的对话框中输入项目名称和保存路径,然后点击“确定”按钮创建新的项目。
3.绘制图纸4.添加元件SEW软件提供了大量的机械元件、电气元件和液压元件。
点击“元件库”按钮,在下拉菜单中选择所需的元件库。
可以通过在元件库中按关键词进行,然后将元件拖放到图纸上。
也可以使用元件库中的模板,直接将模板拖放到图纸上。
5.仿真分析在图纸上添加完所需的元件后,可以进行仿真分析。
首先,点击“仿真”选项卡,在下拉菜单中选择“配置仿真参数”。
然后,在弹出的对话框中设置所需的参数,比如工作条件、元件规格等。
接下来,点击“开始仿真”按钮开始仿真。
6.结果导出在仿真完成后,可以将结果导出为报告或图表。
首先,点击“结果”选项卡,在下拉菜单中选择“导出结果”。
然后,在弹出的对话框中选择要导出的结果类型,比如力学分析结果或电气分析结果。
最后,选择结果导出的格式和保存路径,点击“确定”按钮完成导出。
总结:SEW软件是一款功能强大的设计和仿真软件,可以用于机械系统、电气系统和液压系统的设计和分析。
本文介绍了SEW软件的使用方法,包括软件安装、新建项目、绘制图纸、添加元件、仿真分析和结果导出。
希望这些指南对你使用SEW软件有所帮助。
斯沃数控下载连接及破解方法

/download/sscnc6.05setup.exe下载WinHexWinHex用来破解WinHex 是一款以通用的16 进制编辑器为核心,专门用来对付计算机取证、数据恢复、低级数据处理、以及IT 安全性、各种日常紧急情况的高级工具: 用来检查和修复各种文件、恢复删除文件、硬盘损坏、数码相机卡损坏造成的数据丢失等。
得到ZDNet Software Library 五星级最高评价,拥有强大的系统效用。
功能包括(依照授权类型): ∙硬盘, 软盘, CD-ROM 和DVD, ZIP, Smart Media, Compact Flash, 等磁盘编辑器... ∙支持FAT, NTFS, Ext2/3, ReiserFS, Reiser4, UFS, CDFS, UDF 文件系统∙支持对磁盘阵列RAID 系统和动态磁盘的重组、分析和数据恢复∙多种数据恢复技术∙可分析RAW 格式原始数据镜像文件中的完整目录结构,支持分段保存的镜像文件∙数据解释器, 已知20 种数据类型∙使用模板编辑数据结构(例如: 修复分区表/引导扇区) ∙连接和分割、以奇数偶数字节或字的方式合并、分解文件∙分析和比较文件∙搜索和替换功能尤其灵活∙磁盘克隆(可在DOS 环境下使用X-Ways Replica) ∙驱动器镜像和备份(可选压缩或分割成650 MB 的档案) ∙程序接口(API) 和脚本∙256 位AES 加密, 校验和, CRC32, 哈希算法(MD5, SHA-1, ...)∙数据擦除功能,可彻底清除存储介质中残留数据∙可导入剪贴板所有格式数据, 包括ASCII、16 进制数据∙可进行2 进制、16 进制ASCII, Intel 16 进制, 和Motorola S 转换∙字符集: ANSI ASCII, IBM ASCII, EBCDIC, (Unicode) ∙即时窗口切换、打印、生成随机数字∙支持打开大于 4 GB 的文件,非常快速,容易使用。
SEW变频器软件应用

拷贝至变频器中 点击“Start” 将参数下载至变频器中
SEW变频器
SEW变频器
具体参数的相关说明,详见:Sew_MDX60B 61B变频器操作手册
SEW变频器
刷新/取消按钮
当电脑搜索到所连变频器后,点击Compiler按钮,进入编程界面
SEW变频器
SEW变频器
3、故障列表分析
故障代 码 说明 响应 可能的故障原因 措施
• 启动 MOVITOOLS程序。
SEW变频器
语言选择英文 接口选择USB 选择点对点连接
选择通讯速度
软件版本:
MOVITOOLS_V4.90
选择变频器型号
SEW变频器
刷新/取消按钮
当电脑搜索到所连变频器后,点击Shell按钮,进入参数界面
SEW变频器
SEW变频器
从电脑文件中拷贝 参数保存的路径
F14
编码器
立即关闭
SEW变频器
故障代码的相关说明,详见:Sew_MDX60B 61B变频器操作手册
ቤተ መጻሕፍቲ ባይዱ
F08
n 速度监控
立即关闭
• 减小载荷 • 增加设置的减速时间 (P501 、P503)。 •转速控制器及电流控制器 ( 在无编码器 • 检查编码器接线,必要时以双对形式交 的 VFC 运行方式下 ) 由于机械过载或者 换 A/A 和B/B 电源或电机的相位故障在设定极限中工作。 • 检查编码器供电系统 • 编码器连接错误或旋转方向错误。 • 检查电流限制 • 力矩控制时 nmax 超限。 • 必要时延长斜坡 • 检查线路和电机 • 检查电源相位 • 编码器线或屏蔽线连接错误。 • 编码器线短路 / 断线 • 编码器损坏 检查编码器电缆和屏蔽线连接是否正确, 检查短路和断线。
sew调试步骤自己总结

s e w调试步骤自己总结 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】1.变频器调试步骤:(所用软件为M O V I T O O L S)设置网关DP地址,然后短接所有变频器的DI01与24VIO端子,然后变频器与PC通信,点扫描,扫描出设备后下载变频器启动信息,即parameter1(设置控制方式为VF,根据实际情况设置电机型号),然后修改参数,如P100设为SBUS/Fixed,P101设为SBUS,P600等设为NO FUNCTION,P881设为1,其他变频器也是这样,只是修改一下P881(系统总线的地址)的数值。
然后网关与PC 通信,扫描出与网关通信的所有变频器,然后知道变频器与PLC通信的所用的外设地址,最后把最后一个变频器的S1和S2接通,其余变频器的S1与S2断开,最后在通电状态下把AS 接通(切记是在所有变频器的S1与S2设置正确的前提下)。
伺服调试步骤:(所用软件为MT_Manger)设置伺服DP地址,然后断开DIOO与24VIO,接通DI01与24VIO,同时接通7与9端子,然后软件与伺服通信,通信波特率为,型号为MOVITRAC B,点对点通信方式,下载伺服启动信息,设置转动惯量为100,电机温度过高时立即停止然后把启动信息下载到伺服(必须在禁止模式下)。
然后点通过扩展总线控制,选择通信方式为DP,然后电子齿轮比用默认值,不能点击Caculate,即电子齿轮比全部采用默认值,直接点击NEXT,然后设置软限位,然后下载到伺服(必须在禁止模式下)。
然后进入监控模式,伺服启动必须先设置手动启动,此时状态字Motor turning为1,此时若IPOS reference位为0,必须进行寻参模式,才能启动自动模式,寻参模式启动方法如下:寻参:1.设置P902的参数,确定寻参类型为0,然后在控制模式下通过PC发控制字以及0转速给伺服,即启动寻参,寻参原位信号通过端子DI03(端子功能为Reference Travel)传入,为1时减速,脱离时停止,同时将当前位置清零,此时IPOS reference位为1。
最新SEW伺服控制器的初始化设置

伺服控制器的初始化设置
STET4:在参数界面中,点击“Startup”按钮,进入初始化界面, 点击“Startup-Set1”
“Startup”按钮
伺服控制器的初始化设置
STET5:选择进行完全的初始化,点击“下一步”
伺服控制器的初始化设置
STET6:选择单个电机,并选择矢量/伺服控制
伺服控制器的初始化设置
STET7:选择SEW同步伺服电机DS/DY/CM
伺服控制器的初始化设置
STET8:根据电机铭牌上的数据选择电机型号,电机额定电压,电机额定 转速等参数
伺服控制器的初始化设置
STET9:根据实际需要,选择控制模式
伺服控制器的初始化设置
STET10:设置系统的稳定度,负载转动惯量等参数
伺服控制器的初始化设置
STET11:监控设置和限制值设置,可以点击“Apply proposal”按钮使用 系统推荐值
伺服控制器的初始化设置
STET12:设置PI参数,建议点击“Apply proposal”按钮使用 系统推荐值
伺服控制器的初始化设置
STET13:设置基本控制参数
伺服控制器的初始化设置
STET14:点击“完成”,下载参数
结束语
谢谢大家聆听!!!
15
SEW伺服控制器的初始化设置
伺服控制器的初始化设置
STET2:打开MOVITOOLS软件,设置相应的通讯参数
语言选择英文 接口选择USB
选择点对点连接
选择通ቤተ መጻሕፍቲ ባይዱ速度 选择变频器型号
伺服控制器的初始化设置
STET3:点击”Update”按钮,当显示连接成功后点击”Cancel”按钮
刷新/取消按钮 当电脑搜索到所连变频器后,点击Shell按钮,进入参数界面
sew调试步骤自己总结
1.变频器调试步骤:(所用软件为MOVITOOLS)设置网关DP地址,然后短接所有变频器的DI01与24VIO端子,然后变频器与PC通信,点扫描,扫描出设备后下载变频器启动信息,即parameter1(设置控制方式为VF,根据实际情况设置电机型号),然后修改参数,如P100设为SBUS/Fixed,P101设为SBUS,P600等设为NO FUNCTION,P881设为1,其他变频器也是这样,只是修改一下P881(系统总线的地址)的数值。
然后网关与PC 通信,扫描出与网关通信的所有变频器,然后知道变频器与PLC通信的所用的外设地址,最后把最后一个变频器的S1和S2接通,其余变频器的S1与S2断开,最后在通电状态下把AS接通(切记是在所有变频器的S1与S2设置正确的前提下)。
伺服调试步骤:(所用软件为MT_Manger)设置伺服DP地址,然后断开DIOO与24VIO,接通DI01与24VIO,同时接通7与9端子,然后软件与伺服通信,通信波特率为57.6,型号为MOVITRAC B,点对点通信方式,下载伺服启动信息,设置转动惯量为100,电机温度过高时立即停止然后把启动信息下载到伺服(必须在禁止模式下)。
然后点通过扩展总线控制,选择通信方式为DP,然后电子齿轮比用默认值,不能点击Caculate,即电子齿轮比全部采用默认值,直接点击NEXT,然后设置软限位,然后下载到伺服(必须在禁止模式下)。
然后进入监控模式,伺服启动必须先设置手动启动,此时状态字Motor turning为1,此时若IPOS reference位为0,必须进行寻参模式,才能启动自动模式,寻参模式启动方法如下:寻参:1.设置P902的参数,确定寻参类型为0,然后在控制模式下通过PC发控制字以及0转速给伺服,即启动寻参,寻参原位信号通过端子DI03(端子功能为Reference Travel)传入,为1时减速,脱离时停止,同时将当前位置清零,此时IPOS reference 位为1。
SEW-MDX61B驱动器-MOTION STUDIO软件调试步骤和方法-同步伺服电机

然后点击
移动类型负载折算到电机轴处的转动惯量
运行物体质量M:[kg] 运行速度v:[m/s] 达到运行速度v时电机的运行转速nm:[rpm] 负载折算到电机轴处的转动惯量 Jext:[kgm2 ]
Jext = 91.2 * M * (v/nm)2
转动方向
垂直于圆环平面
实心圆柱体 沿纵轴方向
空心厚壁圆柱体 沿纵轴方向
圆盘
垂直于圆盘平面
圆盘
沿对称轴方向
球体
沿球心轴线方向
空心薄壁球体 沿球心轴线方向
长度l的棍体 垂直于棍体中心
图识 转动惯量
J = m * r2
J=
1 2
*m *
r2
J=
1 2
* m * ( r12 +
r22
)
J=
1 2
*m *
r2
SEW – MDX61B系列调试
总线控制 - 系统架构
端子;模拟量控制 - 系统架构
软件调试工具
➢ 1.电脑通讯盒USB11A ➢ 2. SEW - MOVITOOLS® MOTION STUDIO
软件
USB11A
MOVITOOLS® MOTION STUDIO 软件
➢ 1.电脑通讯盒USB11A 随机附带光盘 ➢ 2. SEW – 网站下载2.2G版本 https://www.seweurodrive.de/os/dud/?tab=software&country=DE &language=de_DE&search=movitools
选择速度操作模式
然后点击
刚性(范围0.5-2),数值越大,刚性 越强,但电机易不稳定,通常先输 入1,在根据实际情况调整
SEW变频器软件应用

SEW变频器
语言选择英文 接口选择USB
选择点对点连接
0
选择通讯速度 选择变频器型号
SEW变频器
刷新/取消按钮 当电脑搜索到所连变频器后,点击Shell按钮,进入参数界面
SEW变频器
从电脑文件中拷贝
SEW变频器
参数保存的路径
拷贝至变频器中
点击“Start” 将参数下载至变频器中
SEW变频器
SEW变频器
具体参数的相关说明,详见:Sew_MDX60B 61B变频器操作手册
SEW变频器
刷新/取消按钮 当电脑搜索到所连变频器后,点击Compiler按钮,进入编程界面
SEW变频器
3、故障列表分析
SEW变频器
故障代 码
F08
F14
说明
响应
可能的故障原因
措施
n 速度监控 编码器
立即关闭 立即关闭
• 减小载荷
• 增加设置的减速时间 (P501 、P503)。
•转速控制器及电流控制器 ( 在无编码器 • 检查编码器接线,必要时以双对形式交
的 VFC 运行方式下 ) 由于机械过载或者 换 A/A 和B/B
电源或电机的相位故障在设定极限中工作。 • 检查编码器供电系统
• 编码器连接错误或旋转方向错误。
目录
硬件介绍 参数程序下载 故障列表分析
1、硬件介绍
SEW变频器
2、参数程序下载
SEW变频器
使用计算机进行调试时,必须使用 4.20 版以上的 MOVITOOLS程序。 • 端子 X13:1 (DIØØ “/CONTROL.INHIBIT”)必须获得 “0”信号! • 启动 MOVITOOLS程序。
• 检查电流限制
SEW-MDX61B驱动器-MOTION STUDIO软件调试方法和步骤-异步伺服电机

设定相关参数
监控电机运行状态
监控模拟量输入数据
监控PLC输入点状态
监控变频器输出点状态
08参数组可记录最 近的5组故障情况
2. 总线网络控制
设定相关参数
监控电机运行状态 监控PLC输入点状态
监控总线数据
监控变频器输出点状态
驱动器内部程序输入
IPOS plus
内部位置控制和逻辑控制系统
• 支持宏指令,最多包含1000个指令行和注释行 • 支持增量型编码器和绝对值编码器 • 近似于PLC功能
软件调试工具
➢ 1.电脑通讯盒USB11A ➢ 2. SEW - MOVITOOLS® MOTION STUDIO
软件
USB11A
MOVITOOLS® MOTION STUDIO 软件
➢ 1.电脑通讯盒USB11A 随机附带光盘 ➢ 2. SEW – 网站下载2.2G版本 https://www.seweurodrive.de/os/dud/?tab=software&country=DE &language=de_DE&search=movitools
SEW – MDX61B系列调试
总线控制 - 系统架构
L1 L2 L3 PE
MDX61B... DBG60B 编码器卡
USB11A
总线网卡 制动电阻
电机编码器 DRL...异步伺服电机
端子;模拟量控制 - 系统架构
L1 L2 L3 PE
MDX61B... DBG60B
编码器卡
USB11A
制动电阻 电机编码器 DRL...异步伺服电机
转动类型负载折算到电机轴处的转动惯量
转动物体质量M:[kg] 转动物体半径r: [m] 转动速度n:[rpm] 达到转动速度n时电机的运行转速nm:[rpm] 负载转动惯量 Jload: [kgm2 ] 负载折算到电机轴处的转动惯量 Jext:[kgm2 ]
LUST驱动器伺服驱动器下载程序

步骤一。
进入主界面点击桌面上的图标,进入到界面。
默认等级为4级。
关掉,选择。
步骤二。
展开主菜单点击便可以展开主菜单。
如果不小心关掉了主菜单,点击主界面的,主菜单将重新弹出。
步骤三。
断开软件使能在下载驱动器参数时,必须断开驱动器使能。
点击主对话框中的,进入界面,点击,设置F1F0 = ,选择,,驱动器的软件使能便断开。
软件使能断开后,主界面的电机状态显示为,此时驱动器显示灯中间的黄灯为常亮状态。
步骤四。
下载程序断开驱动器软件使能后,便可下载软件到驱动器。
点击主界面的,在中选择你需要下载的程序。
步骤五。
更改管理员级别程序下载完成后,需要更改管理员级别。
点击主界面中的,选择第6级,密码为768。
从高级别进入低级别不需要密码。
步骤六。
电机编码器自整定在选择编码器自整定时,先要确定驱动器是否处在软件使能断开状态,管理员级别是否为第6级。
如果不是,请分别对应步骤三,步骤五来修改。
选择主界面的,进入界面。
选中,确定编码器类型是否为默认值RS_RS(1)。
单击,等待几秒钟,驱动器做完一次编码器自整定后,后面的数字会改变。
记住后面数字的高两位,图示的编码器高两位为64 ;再次单击,等待几秒钟,待驱动器再次做完编码器自整定后,比较此时后面数字的高两位是否变化,即数字 64 有没有变化。
如果不变,编码器自整定可完成,按图示标号顺序来完成自整定。
如果每做次编码器自整定,后面数字的高两位都在变化,说明编码器安装有问题,请检测电机编码器及其安装是否正常。
步骤七。
电机辨向做完电机编码器自整定后,得确认电机的三相电源线相序是否正确。
点击主界面的便进入测试界面。
选择控制模式为速度控制,给定速度中输入速度值为60 ,选择开始。
比较电机的实际速度,图标识为4所示的数字63.98。
如果图标识为4所示的数字和给定速度相差很大,比如只有几转或是负数转,而且此时软件检测到的电机电流很大时,则说明电机的电源线U,V,W相序接反,任意对调其中的两相线,重新做电机编码器自整定。
SEW伺服控制培训
第三个窗口,选择变频器连接的电机
简单的速度控制 选择标准模式 (V / F) 选择矢量控制模式 VFC VFC n-control CFC
VFC:电压矢量控制 VFC n-control:MDV控制器和电机
带编码器 CFC:电流矢量控制
变频器内可存储2套电机的参数, 2台电机可通过接触器选择,参数 组通过开关量输入设定;
第一个窗口是不可以修改的,其 显示的存储在变频器内基本参 数(包括选件和电机参数)
第二个窗口,选择全部或部分初始化
选择完整的初始 化过程
选择部分初始 化过程
初始化的内容页面,有三个选项: execute complete start-up //初始所有参数 Execute Partial start-up //初始部分参数 Optimize speed controller //优化的速度控制设置
设定和显示参数
设定CAM、ISYNC参数
和系统状态信息
Data backup:
IPOS应用 程序
监控总线通讯
保存和装载设定参数
SHELL参数设置页面
状态监视
详细见MOVIDRIVE-B系统手册—P139
常用监视参数举例
P60X就是定义的变频器 X13 接线柱功能 P6XX详细见MOVIDRIVE-B系统手册—P176 P03x详细见MOVIDRIVE-B系统手册—P141
下载列可以被修改 两列的不同设置
高亮显示
将建议值赋予 下载值
第十三个窗口
将建议值赋予 下载值
第十四、十五个窗
设置变频器建议设置参数,按Apply proposal 复制参数后修改控 制点和信号的来源为总线。
SEW MC07B变频器参数上传及下载

1.运行“MotionStudio ”软件,从电脑开始菜单
“Programs ”--“SEW ”--“MOVITOOLS-MotionStudio ”--“MOVITOOLS-MotionStudio ”打开0.准备:用通讯线缆将变频器与PC 连接
SEW 变频器参数上传及下载
2.选择“New project ”新建项目,点“OK ”,输入项
目名称,选择保存路径。
3.选择“Configure communication connections ”设置通讯
接口
选择“Edit”编辑通讯接口,在弹出的对话框中如下图,选择对应的“COM port”即COM口,由于用USB电缆连接,故选择
USB”,点“OK”,弹出对话框,选“Yes”确认更改通讯接
5.选择“Start network scan”开启网络扫描。
扫描中,在底部有状态显示。
在左侧选中扫描出的变频器,鼠标右键选择“Manage unit parameter set”装置参数设定管理。
下载参数到变频器选择“Download”,上传参数到PC选Upload”
在弹出的对话框中填写保存名称,选择保存路径等。
下图为上传参数状态图,进度条完成,可电击OK
The End!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!
伺服程序下载步骤
一.首先完成主电路和控制部分接线,完成上电测试,上电变频器七段数码管显示1。
二.在使用相同的伺服电机且有备份程序情况下,可选择传输备份程序。
1.打开软件MT-manage.
2.联机,见图片。
选择PC interface:COM7(USB),Update.出现电机型号后,可终止Update。
3.点击shell.出现下面图面。
*
4.选择copy unit data,出现下面画面。
在上面from…选择我们的备份程序,在下面to…选择inverter.然后点击start按钮。
5.程序传输完成后,启动程序(start)或点击闪电图标。
*
,
/
三.没有备份程序,可进行初始化操作+下载IPOS程序。
初始化操作如下:
1.点击start-up.出现下面画面。
注意控制器和马达的型号和参数。
>
(
】
2.点击Start-up Set 1.出现下面画面。
3.选择Execute complete start-up.点击“下一步”按钮。
出现下面画面。
"
4注意马达型号和其他参数。
点击“下一步”。
出现下面画面
5.选择“下一步”出现下面画面。
[
6.选择Positioning with IPOS.点击“下一步”。
出现下面画面。
inertia 选择电机带动负载重量(工程经验值J0 motor 参数的5-8倍)。
选择完后,点击“下一步”,出现下面画面。
<
8.设置电流极限值(200℅)、转速监视时间(1S)。
.再点击“下一步’,出现下一画面。
9.控制器参数接受建议值,点击”Apply proposal”.再点击“下一步’,出现下一画面。
10.可使用参考值,点击”Apply proposal”.但是100和101参数须改为fieldbus,再点击“下一步’,出现download 画面。
11.点击download,把参数下载下去。
12.打开软件。
参数6。
Terminal assignment设置参照实际输入输出。
-
参数870-876设置可参考下面
执行下载然后点击“start”按钮或闪电标记。
…
13.选择手动操作,验证控制器和电机接线是否正确;刹车是否正常释放;机械是否卡堵或过载。
在进行手动操作测试前,要保证DI00=1 即X13 的第1 个端子要有24VDC 。
程序下载方法:
打开软件,与控制器连接上。
打开“机器人夹具最终。
IPC”。