隧道测量中控制网布设与数据处理方法研究
工程测量第3章工程控制网布设的理论与方法

工程控制网布设的步骤和方法
收集资料
收集工程项目的相关 资料,包括工程规模、 地理环境、施工要求 等。
确定布网方案
根据工程项目的特点 和要求,确定合适的 布网方案,包括控制 点的位置、密度、精 度等。
实地踏勘
对选定的控制点进行 实地踏勘,了解地形、 地物、交通等情况, 以便于施工和后期维 护。
控制点测量
数据整理与校核
02
数据转换与处理
03
数据可视化与分析
对观测数据进行整理、分类和校 核,确保数据的准确性和完整性。
将观测数据转换为统一坐标系下 的数据,并进行必要的数学处理, 如平差计算等。
将处理后的数据以图表、图像等 形式进行可视化,并进行相关分 析。
控制网的精度分析与评定
精度指标
01
根据工程要求,确定控制网的精度指标,如点位中误差、相对
按照规定的测量方法 和精度要求,对控制 点进行测量,获取准 确的地理坐标数据。
数据处理与分析
对测量数据进行处理 和分析,包括平差计 算、精度评定等,以 确保控制网的精度和 可靠性。
02
工程控制网的坐标系与投 影
坐标系及其分类
地理坐标系
以地球赤道面为基准,用于描 述地球上点的位置,通常采用
经纬度表示。
兰勃特投影
将椭球面上的点按照一定的数学公式 投影到平面上的方法,常用于大比例 尺地图制作。
通用横轴墨卡托投影
将地球表面的一部分投影到平面上的 方法,常用于全球范围的海图制作。
墨卡托投影
将地球表面全部投影到平面上的方法, 常用于航海和航空导航图制作。
坐标系的转换与联测
坐标系转换
将不同坐标系下的点进行坐标转换,以便统一使用某个坐标 系进行测量和计算。
长大隧道群精密测量控制网布网技术

0科教前沿0
S IN E&T C N L G F R TO CE C E H O O YI O MA IN N
21 年 01
第 3 期 1
长大隧道群精密测量控制网布网技术
范 增 ( 中铁十七局集团第六工程有限公司 福建
福州 3 0 0 ) 5 0 0
【 要】 摘 本文对长大隧道群精密测量控制网的布网技术做 了全面的布网技术介绍与精度分析 。 并以京福客专闽赣 VI I标二分部所辖的金
2相向开挖 长度 大于 2k 的隧道应做特殊设计 。 . 0m
边向洞 内同时传递方 向和坐标 . 这种联 系方式一方面可 以使与洞外控 制网的联系的洞内导线构成 闭合检核条件 , 另一方 面 . 洞外两条边 向 长大隧道群应有确定统 一的坐标基准 , 方位基准 , 长度基准 。 控制 洞内传递 已知数据 . 以提高洞内导线 的贯通精度 。 布设交叉 双导线 ( 图 网应控制全部隧道的长度和方 向、 高程 。 这样建立的坐标系统 。 能保证 11( 12 —)图 - )主要是为 了增加多余观测量 ,增加导线 的闭合检核条 所有隧道的测量工作约束 于同一个测量基准 中. 这样就减少 了错误发 件, 高网的整体强度和精度。 提
11 洞 内导线控制测量 .. 2 当完成洞外控制测量后 .可以通过软件选取最佳进洞联系边 . 用 于向洞 内传算坐标与方位。为提高传 递精度 , 一般选取两条进洞联 系
贯通限差
10 l0 0 3
10 6
2O 0
20 5
30 2
5 0
注: . 1 本表不适用 于利 用竖井贯通的隧道:
7 5 15 3
10 6
l 8 1 7
2 5
隧道洞内外导线测量方法及注意事项
隧道洞内外导线测量方法及注意事项隧道洞内外导线测量方法及注意事项一、隧道导线点布设1、洞外平面控制网一般采用GPS测量,每个洞口应沿洞口连线的方向布设4个控制点,形成大地四边形,点间尽量相互通视,点间的距离不小于300m为宜(规范中无明确规定),各点间的距离相差不宜过大,一般相邻点间边长之比不能超过1:3。
并且有不少于2个点与隧道洞口通视,作为与洞内传递方向的洞外联系边,且该联系边长度不宜小于300m。
洞外控制点连线以与隧道中心线方向平行或垂直为宜,以减小点位误差对贯通面横向误差影响。
点位的埋设应稳定,便于长期保存。
布点时还应注意进洞联系边的俯仰角不应过大,规范要求:GPS控制网进洞联系边最大俯仰角不宜大于5°,导线网、三角形网的最大俯仰角不宜大于15°。
2、洞外水准点一般每个洞口应埋设不少于2个以上的水准点。
水准点应尽可能与洞口等高,两水准点间的高差应以水准测量1~2站即可联测为宜。
水准点应埋设在洞口附近不受施工影响的地方,且便于与隧道洞内联测为宜。
3、洞内导线一般大于1、5km的隧道应布设双导线,形成多边形闭合环,每个闭合环一般由4~6条边构成。
导线点间距一般在200m 左右,不宜过长或过短。
相邻导线边长不宜相差太大,相邻边长之比不能超过1:3。
一般导线点离障碍物的距离不宜小于0、2m。
4、洞内水准点一般200m~500m设置一对,应选择在稳定便于长期保存。
隧道洞内外导线测量方法及注意事项 隧道洞内、外导线布设示意图洞外控制点洞外控制点洞外控制点洞外控制点洞口投点进洞方向线,距离不小于300m进洞方向线,距离不小于300m洞内导线,间距控制在200m左右二、隧道导线测量方法与注意事项1、隧道导线测量主要内容:洞外平面、高程测量,洞口投点测量,进洞联系测量,洞内导线、高程测量。
2、洞外平面、高程测量2、1洞外平面GPS测量:洞外平面测量目前一般均采用GPS测量,按要求布设好各洞口控制点,按照规范要求的测量等级、精度与方法组织测量即可,测量计算方法项目用的较小,不详细叙述。
客运专线特长隧道CPⅡ控制网布设及测量
客运专线特长隧道CPⅡ控制网布设及测量近年来,随着我国经济的发展和人民生活水平的提高,对于高速、安全、舒适、便捷的交通需求也越来越高。
为了满足人们对于交通运输的需求,客运专线逐渐成为我国高速铁路的主要交通方式之一。
在客运专线建设中,特长隧道是铁路工程中的一项重要工作,其大多数建设在山区和丘陵地带,这些地段地形复杂,隧道长度一般在5公里以上,而且隧道施工条件非常恶劣。
为了保证隧道施工的质量和安全,以及保障铁路行车的安全和稳定,必须对隧道进行精细化的控制监管。
一、CPⅡ控制网概述CPⅡ控制网是国际上常用的一种精密水平控制网,是铁路工程测量和搭设轨道系统的基础控制。
在特长隧道建设中,这种控制网布设至关重要。
该控制网是一种闭合的控制网,通常由50个左右的控制点组成,控制点间的平均距离应不超过1000米,点间的定位精度应不大于1毫米。
CPⅡ控制网的布设应满足以下几个要求:1、控制点应在平面内组成紧密的控制网,不能出现空隙或重叠,保证布设的均匀性和完整性。
2、控制点应按照严格的约束条件进行测量,如点号、坐标、高程等。
3、控制点的数量应根据地形地貌、工程难度和施工工艺等因素确定。
在特长隧道CPⅡ控制网中,应按照一定的布设密度分布控制点,具体布设方式如下:1、隧道中心线上的控制点应密度布设,保证隧道设计轴线的准确性和规范性。
2、在通风巷、洞口和洞底等隧道固定的区域内布设必要的控制点,保证施工质量和结构安全。
3、在临近隧道的开口部位、洞口等位置也应布设控制点,以确保铁路线路在进出隧道时的稳定性和安全性。
为保证CPⅡ控制网的定位精度,其测量应使用高精度的测量仪器,如全站仪、较差仪等。
在测量过程中,应注意以下问题:1、控制点应在不同的测量天气、光照和地形条件下反复测量,以保障测量的准确性。
2、控制网的测量应按照能够保证精度和可靠性的测量顺序进行,如首先进行控制点的定位,然后进行基准面的测量等。
3、在控制网的布设中,为了防止控制点被误伤,应设置相应的外围控制点和固定点,以保证控制点测量的准确性和可靠性。
高铁隧道洞外控制网布设及贯通精度估算

高铁隧道洞外控制网布设及贯通精度估算摘要:高速铁路隧道工程的洞外控制网是隧道工程控制测量的关键,它的精度直接影响到隧道施工进度及施工质量。
目前,我国高铁中,超长隧道工程非常普遍,且开挖断面大,要求贯通精度高,如何确保隧道洞外控制网的精度,已成为隧道施工中一项关键的技术。
在实际测量中,采用GPS测量技术进行洞外控制网的施测,是目前最为普遍的方法。
本文通过云桂高铁革朗隧道洞外控制网的测量,详细介绍了隧道洞外GPS网的布设及贯通精度评估。
关键词:高铁隧道;洞外控制;GPS网;精度估算1 控制网基本指标新建云桂高速铁路云南段革朗隧道,施工里程为D4K359+039~D4K370+614,正线长度11575m。
洞外控制网采用GPS进行,其中央子午线取隧道中心经线为105°30’00”,高程投影面取隧道平均高程面为900 m,采用WGS84系统坐标系椭球参数。
外业工作分为1个整网,各测段之间采用边联结方式形成由三角形或大地四边形组成的带状网。
每个洞口布设至少3个点,周围视野开阔,对天通视情况良好,高度角15°以上无障碍物阻挡卫星信号;远离高于安置天线高度的树木、建筑物等阻挡卫星信号的障碍物。
点间距不少于400m,加密控制点标石埋设标准与精测网CPII控制点标石埋设规格及要求相同。
观测时将隧道洞口设计院交接的CPI、CPII控制点纳入GPS独立网中,整网为14个点,共有同步环6个。
2 洞外GPS网施测2.1 施测人员参加复测人员共6人,工程师2人,测量技术员4人,在进行洞外控制网施测前对参与测量人员进行了统一培训。
2.2 设备投入及外业测量洞外控制网施测量共投入天宝(Trimble)5800双频接收机4台套/组,标称精度:5mm+1ppm;投入天宝(Trimble)R4双频接收机2台套/组,标称精度:5mm+1ppm。
隧道洞外控制网按二等网观测,每个观测时段观测90min,每个同步环观测2个时段,采用静态相对定位模式观测,外业操作准确对中、整平仪器,每时段观测前后分别量取天线高,取两次量高的平均值。
石林特长隧道洞外GPS施工控制网建立探讨
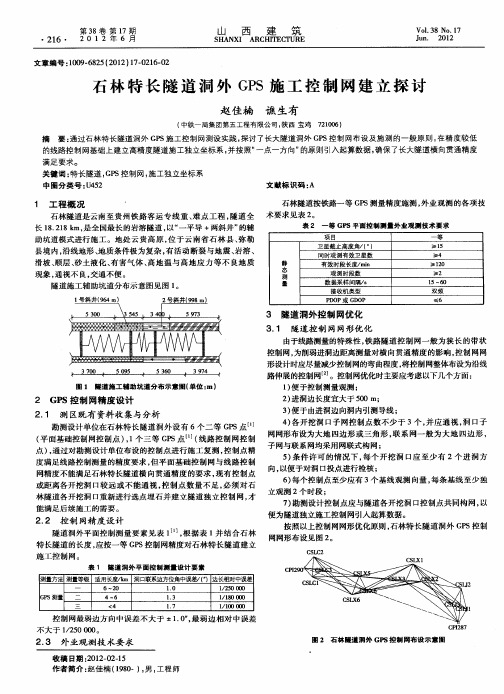
网 网形 布设 见 图 2 。
CS ^2 L c
2 2 控制 网精 度设 计 .
隧道洞外平面控制测 量要素见 表 1l, 据表 1 结合 石林 _ 根 j 并
特长隧道的长度 , 按一等 G S控制 网精度对 石林 特长 隧道建立 应 P 施工控制网 。
第3 8卷 第 1 7期
.
2 6 . 2 0 1 2 年 6 月 1
S HAN ARC T C RE XI HI E TU
山 西 建 筑
VoI3 .1 . 8 NO 7
Jn u . 2 l 02
文章编 号 :0 9 6 2 2 1 ) 7 0 1- 2 10 —8 5(0 2 1 —2 6 0
路伸展的控制 网 J 。控制 网优化 时主要应考虑以下几个方面 : 1 便于控制测量观测 ; )
图 1 隧道施工辅助坑道分布示 意图( 单位 .i h)
2 GP S控 制 网精度设 计
2 进洞边长度宜大于 50 m; ) 0 3 便 于由进洞边 向洞 内引测导线 ; ) 4 各开挖洞 口子 网控制点 数不少 于 3个 , ) 并应 通视 , 口子 洞 网网形布设为大地 四边形 或三 角形 , 系网一般 为大 地 四边 形 , 联
网精度不 能满足石林特长隧道横 向贯通 精度 的要 求 , 有控制 点 现 或距 离各开挖洞 V较 远或 不能 通视 , I 控制 点数量 不足 , 须对 石 必 林 隧道各开挖洞 口重新进行选点埋 石并 建立 隧道独立控 制 网, 才
能满 足 后 续 施 工 的 需 要 。
7 勘测设计 控制点应与隧道各 开挖洞 口控制点共 同构网 , ) 以 便为隧道独立施工控制 网引入起算 数据。
隧道控制测量和监控量测
一、洞内外控制测量
2、隧道洞外控制测量
按《工程测量规范》要求,隧道施工独立控制网旳边长投影变形值 要不大于2.5cm/km。从上表能够看出该隧道控制网达不到精度要求,为 了减小投影需建立独立网。
该隧道独立网采用既变化投影面又变化投影带旳措施。该独立网是 在北京54椭球下,以勘测网中隧道进口GPS9201点作为约束点起算,以 GPS9201-GPS9209方向作为约束方向,中央子午线 ,投影面高程H=332.10m。
一、洞内外控制测量
一、洞内外控制测量
2、隧道洞外控制测量
以某一长大隧道为例,该隧道东西走向,长约8km,中间设一斜井。该 区布设了勘测网(北京54参照椭球,0米投影面,中央子午线经度为 1 1 8 ° 1 5 ′ ) , 在测区共加密12个点GPS9201-GPS9212.
一、洞内外控制测量
2、隧道洞外控制测量
二、隧道监控量测
5、监测资料整顿及数据分析
回归分析是量测数据数学处理旳主要措施,经过对量测数据回归分 析预测最终位移值和各阶段旳位移速率。详细措施如下: 1 将量测统计及时输入计算机系统,根据统计绘制纵横断面地表下 沉曲线和洞内各测点旳位移u-时间t 旳关系曲线。 2 若位移-时间关系曲线出现反常,表白围岩和支护已呈不稳定状态, 加强监控量测频率,必要时将暂停开挖并进行加强支护处理。 3 当位移-时间关系曲线趋于平缓时,进行数据处理或回归分析,从 而推算最终位移值和掌握位移变化规律。 4 各测试项目旳位移速率明显收敛,围岩基本稳定后,进行二次衬 砌旳施作。
从上表能够看出,地面全站仪旳测量数据与独立网 GPS 坐标反算旳 数据吻合程度很好,能够验证独立网测量成果旳精度和可靠性,用该独 立网能够到达该隧道贯穿误差精度旳要求,所以该平面独立网能够作为 该隧道施工测量控制旳基准。
隧道独立控制网布设技术设计方案

新建铁路蒙西至华中地区铁路煤运通道MHTJ-29标段(DK1596+550~DK1658+293.5)隧道独立控制网技术设计方案中铁十五局集团有限公司蒙华铁路项目部二〇一六年五月目录一、任务概况 ................................................................................................................................................. - 1 -二、既有资料 ................................................................................................................................................. - 2 -三、技术依据 ................................................................................................................................................. - 2 -四、坐标及高程系统..................................................................................................................................... - 3 -4.1、平面坐标系统............................................................................................................................... - 3 -4.2、高程系统 ....................................................................................................................................... - 4 -五、隧道分布情况......................................................................................................................................... - 4 -六、人员及仪器配置..................................................................................................................................... - 4 -6.1、人员配置情况............................................................................................................................... - 4 -6.2、设备配置情况............................................................................................................................... - 5 -七、控制网点选埋要求................................................................................................................................. - 5 -7.1、控制点的选点、埋设要求.......................................................................................................... - 6 -7.2、控制点的编号............................................................................................................................... - 7 -八、控制网测量方法及精度指标................................................................................................................ - 7 -8.1、平面控制网测量方法及精度指标.............................................................................................. - 7 -8.1.1、洞外平面控制网测量方法及精度指标.................................................................................. - 7 -8.1.2、洞内平面控制网测量方法及精度指标.................................................................................. - 8 -8.2、高程控制网测量方法及精度指标.............................................................................................. - 8 -九、验前贯通误差估算................................................................................................................................. - 8 -9.1、隧道贯通误差要求....................................................................................................................... - 9 -9.2、平面验前贯通误差估算 .............................................................................................................. - 9 -9.2.1、洞外GPS平面验前贯通误差估算 ........................................................................................ - 9 -9.2.1.1、小于4km的隧道洞外GPS平面验前贯通误差估算 ..................................................... - 9 -9.2.1.2、大于4km的隧道洞外GPS平面验前贯通误差估算 .................................................. - 10 -9.2.2、洞内导线平面验前贯通误差估算....................................................................................... - 10 -9.2.2.1、小于4km的隧道洞内导线平面验前贯通误差估算.................................................... - 10 -9.2.2.2、大于4km的隧道洞内导线平面验前贯通误差估算.................................................... - 11 -9.3、高程验前贯通误差估算 ........................................................................................................... - 12 -9.3.1、洞外高程验前贯通误差估算................................................................................................ - 12 -9.3.1.1、小于4km的隧道洞外高程验前贯通误差估算............................................................. - 12 -9.3.1.2、大于4km的隧道洞外高程验前贯通误差估算............................................................. - 12 -9.3.2、洞内高程验前贯通误差估算................................................................................................ - 13 -9.3.2.1、小于4km的隧道洞内高程验前贯通误差估算............................................................. - 13 -9.3.2.2、大于4km的隧道洞内高程验前贯通误差估算............................................................. - 13 -十、独立控制网的具体实施 ..................................................................................................................... - 13 -10.1、洞外GPS控制网.................................................................................................................... - 14 -10.1.1、洞外GPS控制网网形设计 ............................................................................................... - 14 -10.1.2、洞外GPS测量技术要求.................................................................................................... - 15 -10.1.3、洞外GPS外业观测要点.................................................................................................... - 15 -10.2、洞内导线控制网 ..................................................................................................................... - 18 -10.2.1、洞内导线控制网网形设计 ................................................................................................. - 18 -10.2.2、洞内导线测量技术要求 ..................................................................................................... - 18 -10.2.3、洞内导线外业观测要点 ..................................................................................................... - 19 -10.3、高程控制网.............................................................................................................................. - 20 -10.3.1、高程控制网网形设计.......................................................................................................... - 20 -10.3.2、高程控制网测量技术要求 ................................................................................................. - 21 -10.3.3、高程控制网外业观测要点 ................................................................................................. - 22 -10.4、测量进度计划及保障措施..................................................................................................... - 24 - 十一、数据处理.......................................................................................................................................... - 24 -11.1、洞外GPS控制网.................................................................................................................... - 24 -11.1.1、数据处理流程...................................................................................................................... - 25 -11.1.2、基线解算及网平差处理指标............................................................................................. - 25 -11.1.3、基线向量网平差.................................................................................................................. - 26 -11.2、洞内导线控制网 ..................................................................................................................... - 27 -11.2.1、数据处理流程...................................................................................................................... - 27 -11.2.2、数据处理指标...................................................................................................................... - 28 -11.2.3、导线网平差 .......................................................................................................................... - 28 -11.3、高程网数据处理 ..................................................................................................................... - 29 -11.3.1、外业观测数据检核.............................................................................................................. - 29 -11.3.2、偶然中误差、全中误差计算............................................................................................. - 30 -11.3.3、高程网平差 .......................................................................................................................... - 30 - 十二、控制网测量评判方法及标准......................................................................................................... - 31 - 十三、控制测量成果上报.......................................................................................................................... - 32 -13.1、原始数据.................................................................................................................................. - 32 -13.2、测量报告编制.......................................................................................................................... - 32 - 十四、测绘资质、人员资质及仪器检定证书........................................................................................ - 34 -14.1、测绘资质证书.......................................................................................................................... - 34 -14.2、主要人员资格证书................................................................................................................. - 34 -14.3、仪器检定证书.......................................................................................................................... - 35 -蒙西至华中地区铁路煤运通道MHTJ-29标隧道独立控制网技术设计方案一、任务概况1、工程概况新建蒙西至华中地区铁路煤运通道MHTJ-29标位于湖南省浏阳市,自DK1596+550至DK1658+293.5,正线长61.412km,线路大致东西走向,依次穿越溪江乡、古港镇、三口乡、官渡镇至张坊镇结束,由中铁十五局集团承建,管段内共有隧道21座,共计14579.16延米。
隧道控制网的布设

2、坐标增量闭合差平差计算
(1)根据角度闭合差平差结果,从第一个环的已知边开 始按逆时针方向依次计算各导线边的方位角:
(2)从第一个环的已知点开始,按逆时针方向依次计算 各导线边的坐标增量及各环的坐标增量闭合差。
(3)
(4)同理,分配坐标增量闭合差改正值时,公共边坐标 增量改正值应考虑相邻环的影响,其改正值=本环的 改正值-相邻环的改正值,而其余各边的改正值就是 本环的改正值。
洞外高程控制测量
正常进洞关系的计算和进洞测量
隧道洞内控制测量
带状导线网的矩阵平差
• 所谓带状导线网是指有几个以上导线环所组成的伸展形 导线网, 环与环之间仅有条公共边如图, 这种图形在隧道 控制网中是常用的。
平差步骤
1、角度闭合差的调整 • 多边形闭合环的平差计算采用近似平差法——解
1、计算各闭合环的角度闭合差ωβ1、ωβ2、 ωβ3。角度闭合差应≤ (其中:mβ——设 计的测角精度,n——内角个数)。
2、角度闭合差平差计算
假设导线环各水平角为等精度观测,则环闭合 差平均分配到各水平角上,设三个导线环内角 改正值分别为、、 ,导线环边数分别为n1、 n2、n3,根据方向平差原理可得到下列条件 方程组,方程中本环改正值的系数就是本环的 导线边数,相邻环改正值的系数是两个环的公 共边数,并取负号。
Diagram
3.1洞外平面控制测量 洞外平面控制测量应结合隧道长度、平面形状、线路通
过地区的地形和环境等条件进行,可采用的方法有:中线法、 精密导线法、三角锁网法、GPS测量。 1.中线法(平面控制简单、直道中线的平面位置,测设在地表上,经反复 核对改正误差后,把洞口控制点确定下来,施工时就以这些 控制点为准,将中线引入洞内。
由于光电测距仪和全站仪的普遍应用,三角测量除 采用测角三角锁外,还可采用边角网和三边网作为隧 道洞外控制。但从其精度、工作量等方面综合考虑, 以测角单三角形锁最为常用。经过近似或严密平差计 算可求得各三角点和隧道轴线上控制点的坐标,然后 以这些控制点为依据,可计算各开挖口的进洞方向。
隧道控制测量

m y
2 R x
向中误差(mm),即 其中
m yl ——由于测边误差影响,产生在贯通面上的横
ml m yl l
2 d y
m ——由导线环的闭合差求算的测角中误差(″)
Rx——导线环在隧道相邻两洞口连线的一条导线上各 点至贯通面的垂直距离(m)。 ml ——导线边边长相对中误差 l Dx——导线环在隧道相邻两洞口连线的一条导线上各 边在贯通面上的投影长度(m)。
o
x
βi-1 β1
βA 0 (A)
s1 α1
1 αA
s2 α2
β2
2
i-1
si αi
βi
i
βn-1
n-1
贯 通 面 方 向
βB
(B)
n
y
E
隧道中线
1、导线测量贯通误差计算
受洞外、洞内平面控制测量影响所产生在贯通面上的横向 中误差,按下列公式计算:
m m
2 y
m
2 yl
式中 m y ——由于测角误差影响,产生在贯通面上的 横向中误差(mm),即 m
第三节
2、现场踏勘与交桩
洞外控制测量
在研究了这些资料后,在进行实地踏勘。进一步判明 这些资料的正确性,并详细了解隧道两侧的地形,两端洞 口线路的走向,里程桩点特别是主点的设置等。踏勘的过 程也是勘测设计单位向施工单位现场交桩的过程。
3、选点布网
在了解了测区各有关资料,现场实际情况后,即可进 行测量设计,研究洞外控制网的布网方案。平面控制网的 设计,可以结合隧道的长度以及线路通过地区的地形情况, 分别布设成三角网、边角网、导线网、GPS网等。高程控 制网一般均采用水准测量,也可采用光电测距三角高程来 代替三、四等水准测量。
李家营隧道独立控制网的建立与精度分析

李家营隧道独立控制网的建立与精度分析论述了长大隧道洞外独立控制网的建立方法,介绍了隧道控制网建网的网型设计、观测和数据处理方法,建立独立控制网的步骤,对设计曲线要素进行坐标转换并对投影变形引起的线性不连续进行断链调整,并就GPS控制测量误差对隧道横向贯通误差的影响值进行了估算。
标签:长大曲线隧道;独立控制网;长度投影变形;一点一方向;设计曲线转换;断链;贯通误差;估算1 工程概况李家营隧道位于河北省承德市境内,设计为双线隧道。
进口里程为DK312+791,出口里程为DK322+243,隧道全长9452m(其中包括明洞及棚洞19m),最大埋深583m。
隧道进口段位于左偏曲线上,左线半径R=1600m,右线半径R=1604m,曲线段长504m;隧道出口段位于右偏曲线上,左线半径R=1600m,右线半径R=1596m,曲线段长275m。
隧道其余地段均位于直线上。
隧道内纵坡为单面坡。
从隧道进口至DK313+650为-4‰的坡,长859m;DK313+650至DK321+050为-9.0‰的坡,长7400m;DK321+050至出口段为-3.0‰的坡,长1193m。
2 李家营隧道工程独立坐标系的建立2.1采用的参考椭球平面控制网采用工程独立坐标系,基于WGS-84椭球参数(长半轴a=6378137m,扁率α=1/298.257223563)。
2.2工程独立坐标系的建立李家营隧道洞外控制网的平面坐标系采用隧道独立的施工坐标系。
独立坐标系定义为:以隧道洞内轨顶的平均高程面作为坐标基准的高程基准面,以隧道中央的精度作為中央子午线的精度。
平均高程面是由隧道路肩的平均设计高程508.758米,并考虑测区的高程异常(2.2458米)后得到的,采用值为511.004米。
李家营隧道中央子午线采用值为117°43′18.16181″。
以JKQX (JD106小里程方向曲线上一点)为坐标起算原点,以隧道线路左线前进方向(JKQX→JD107)为X轴正方向,X轴顺时针旋转90°为Y轴,建立李家营隧道工程独立坐标系。
高速公路定测中特长隧道独立控制网的建立方法及应用
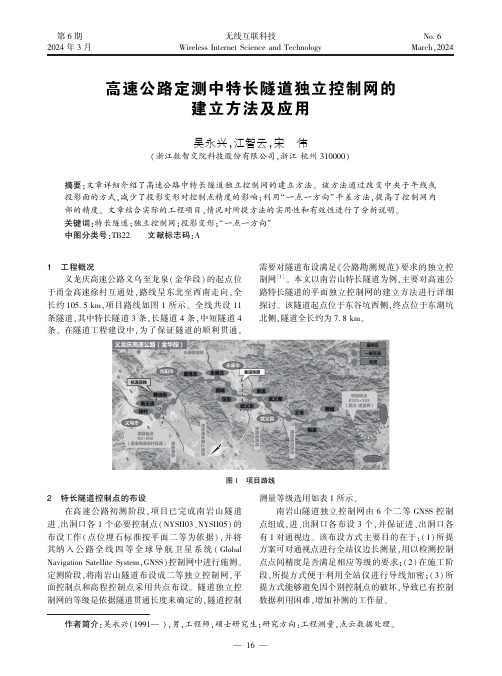
第6期2024年3月无线互联科技Wireless Internet Science and TechnologyNo.6March,2024作者简介:吴永兴(1991 ),男,工程师,硕士研究生;研究方向:工程测量,点云数据处理㊂高速公路定测中特长隧道独立控制网的建立方法及应用吴永兴,江智云,宋㊀伟(浙江数智交院科技股份有限公司,浙江杭州310000)摘要:文章详细介绍了高速公路中特长隧道独立控制网的建立方法㊂该方法通过改变中央子午线或投影面的方式,减少了投影变形对控制点精度的影响;利用 一点一方向 平差方法,提高了控制网内部的精度㊂文章结合实际的工程项目,情况对所提方法的实用性和有效性进行了分析说明㊂关键词:特长隧道;独立控制网;投影变形; 一点一方向 中图分类号:TB22㊀㊀文献标志码:A 1㊀工程概况㊀㊀义龙庆高速公路义乌至龙泉(金华段)的起点位于甬金高速徐村互通处,路线呈东北至西南走向,全长约105.5km,项目路线如图1所示㊂全线共设11条隧道,其中特长隧道3条,长隧道4条,中短隧道4条㊂在隧道工程建设中,为了保证隧道的顺利贯通,需要对隧道布设满足‘公路勘测规范“要求的独立控制网[1]㊂本文以南岩山特长隧道为例,主要对高速公路特长隧道的平面独立控制网的建立方法进行详细探讨㊂该隧道起点位于东谷坑西侧,终点位于东湖坑北侧,隧道全长约为7.8km㊂图1㊀项目路线2㊀特长隧道控制点的布设㊀㊀在高速公路初测阶段,项目已完成南岩山隧道进㊁出洞口各1个必要控制点(NYSII03㊁NYSII05)的布设工作(点位埋石标准按平面二等为依据),并将其纳入公路全线四等全球导航卫星系统(GlobalNavigation Satellite System,GNSS)控制网中进行施测㊂定测阶段,将南岩山隧道布设成二等独立控制网,平面控制点和高程控制点采用共点布设㊂隧道独立控制网的等级是依据隧道贯通长度来确定的,隧道控制测量等级选用如表1所示㊂南岩山隧道独立控制网由6个二等GNSS 控制点组成,进㊁出洞口各布设3个,并保证进㊁出洞口各有1对通视边㊂该布设方式主要目的在于:(1)所提方案可对通视点进行全站仪边长测量,用以检测控制点点间精度是否满足相应等级的要求;(2)在施工阶段,所提方式便于利用全站仪进行导线加密;(3)所提方式能够避免因个别控制点的破坏,导致已有控制数据利用困难,增加补测的工作量㊂表1㊀隧道控制测量等级选用隧道贯通长度L G/m平面测量等级高程测量等级L Gȡ6000二等二等3000ɤL G<6000三等三等1000ɤL G<3000四等四等L G<1000一级一级3㊀投影变形的计算分析㊀㊀在高速公路初测阶段,公路全线平面坐标系统采用国家2000椭球参数,中央子午线120ʎ,投影面为大地高150m,投影长度变形值最大为1.74cm/km,最小为0.07cm/km,分析仅满足 选择路线平面控制测量坐标系时,应使测区内投影长度变形值不大于2.5cm/km 的要求,南岩山隧道边长投影变形分析如表2所示㊂在高速公路定测阶段,为了使南岩山隧道独立控制网满足 大型构造物平面控制测量坐标系,其投影长度变形值不大于1cm/km 的要求,将该区段的投影面大地高调整为200m,而中央子午线保持不变,南岩山隧道边长投影变形分析如表3所示㊂投影变形值可通过改变中央子午线或投影面的方式进行,其计算公式如下:ΔS=Y2m2R2A-H m+h mR A+H m+h m(1)其中,ΔS为投影变形值,Y2m2R2A为边长高程归化改正值,-H m+h mR A+H m+h m为边长高斯投影改正值,Y m为归算边两端点横坐标平均值,R A为地球平均曲率半径,H m为归算边的平均高程,h m为测区大地水准面高出参考椭球面的差值㊂表2㊀南岩山隧道边长投影变形分析位置设计高程/m 到抵偿投影面高度/m高程归化变形值/(cm㊃km-1)距离中央子午线距离/km边长投影改正值/(cm㊃km-1)投影变形值/(cm㊃km-1)隧道进口1411-0.028.20.080.07隧道出口256116-1.827.80.07-1.74㊀㊀注:国家2000椭球参数,中央子午线120ʎ,投影面为大地高150m㊂表3㊀南岩山隧道边长投影变形分析位置设计高程/m 到抵偿投影面高度/m高程归化变形值/(cm㊃km-1)距离中央子午线距离/km边长投影改正值/(cm㊃km-1)投影变形值/(cm㊃km-1)隧道进口141-490.778.20.080.85隧道出口256-66-1.037.80.07-0.96㊀㊀注:国家2000椭球参数,中央子午线120ʎ,投影面为大地高200m㊂4㊀GNSS控制网4.1㊀GNSS控制网外业观测㊀㊀本文采用6台双频大地型GNSS接收机Trimble R10进行外业观测,仪器均经计量监督检测机构专用仪器计量站检定,且在检定有效期内㊂天线高度在每时段前㊁后各量取一次,互差小于3mm,取平均值记入观测手簿㊂南岩山隧道独立控制网共观测4个时段,每个观测时段长度均大于240min,数据采样间隔率为10s,从而保证了较好的星座图形强度和数据采集量㊂GNSS控制网观测要求执行如表4所示㊂表4㊀GNSS控制网观测的主要技术要求序号项目二等三等四等1卫星截止高度角/(ʎ)ȡ15ʎȡ15ʎȡ15ʎ2同时观测有效卫星颗数ȡ4ȡ4ȡ4 3平均重复设站次数ȡ4.0ȡ2.0ȡ1.6 4每时段有效观测时间/minȡ240ȡ90ȡ60 5采样间隔/sɤ30ɤ30ɤ30 6几何因子ɤ6ɤ6ɤ64.2㊀GNSS基线解算与网平差㊀㊀在GNSS外业观测结束后,研究先进行数据的传输和检查,再对观测的数据进行处理㊂南岩山隧道的观测数据采用华测导航CGO进行数据处理㊂在数据导入CGO软件前,系统可利用Convert To RINEX软件将T02/T04格式的原始观测数据文件转换成RINEX标准数据文件㊂经基线解算和自由网平差后,重复基线㊁同步环㊁异步环㊁最弱点㊁最弱边等相关精度指标均能够满足‘公路勘测规范“的要求㊂4.3㊀ 一点一方向 平差㊀㊀WGS84(World Geodetic System1984)坐标系下经自由网平差后,将各合格基线导入由武汉大学测绘学院研制的CosaGPS平差软件中实现 一点一方向 平差㊂ 一点一方向 即固定一点的坐标和该点至另一点的方向来建立独立坐标系,其中方向由坐标方位角体现,固定点的坐标及方位角易于获得,可采用2个已知的控制点经坐标反算计算得到[2]㊂一点一方向 平差的具体过程如下㊂(1)新建工程项目文件,并设置相关参数,如图2所示㊂(2)使用高速公路初测阶段的南岩山隧道进出洞口的2个已知四等控制点NYSII03和NYSII05作为控制起算点,其中NYSII03为固定点,NYSII05为方位点㊂平差参数设置如图3所示㊂图2㊀新建工程文件图3㊀ 一点一方向 平差参数设置㊀㊀(3)经 一点一方向 平差后,最弱点㊁最弱边的精度指标满足相关规范要求,如表5 6所示㊂表5㊀最弱点精度最弱点北向差值M x/cm东向差值M y/cm点位差值M P/cmNYSII050.220.230.32表6㊀最弱边精度最弱边边长S/m边长差值M S/cm相对中误差M S:S NYSII05 NYSII04648.71760.241/2680004.4㊀精度分析㊀㊀为了验证 一点一方向 平差结果的精度可靠性,研究使用Leica TS06-2ᵡULTRA全站仪对南岩山隧道进㊁出洞口的2条通视边进行平距检测㊂2条通视边均往返观测各4个测回点,并对测距进行仪器加乘常数改正㊁气象改正㊁倾斜改正和投影改正[3],全站仪测距边与隧道独立控制网坐标反算距离对比如表7所示㊂由表7可知, 一点一方向 平差后的坐标反算边长以及全站仪实测边长的相对误差均小于1/100000㊂表7㊀全站仪测距边与隧道独立控制网坐标反算距离对比点名改化后全站仪测量平距/m反算边长/m差值/m相对误差NYSII01 NYSII02 NYSII05 NYSII06469.3683469.3729-0.00461/102037 1030.02131030.0296-0.00831/124099㊀㊀综上可知, 一点一方向 平差具有以下优缺点: (1)所提方法能够以低等级控制起算点实现高等级隧道独立控制网;(2)所提方法能够保持隧道整体坐标系统的一致,避免了隧道中线坐标的转换问题;(3)所提方法解决了投影变形超限的问题;(4)所提方法会将投影变形误差传递到隧道的另一端㊂5 结语㊀㊀本文结合实际的工程应用,详细地介绍了在高速公路定测中特长隧道独立控制网的建立方法㊂通过高精度全站仪实测边长对比,研究验证了在起算点精度等级较低的情况下,利用 一点一方向 平差实现高等级隧道独立控制网的建立㊂虽然此方法能保证路线与南岩山隧道进洞口的正常衔接,但是由于投影变形误差的传递影响,在隧道另一端与路线存在一定程度上的偏差㊂所提方法可以通过控制点的联测及曲线调整或设置路线断链2种方法保证施工顺接[4]㊂参考文献[1]中交第一公路勘察设计研究院.公路勘测规范: JTG C10 2007[S].北京:人民交通出版社,2007.[2]钱健龙.采用CosaGPS软件 一点一方向 平差控制投影长度变形的方法探讨[J].港工技术与管理, 2023(2):48-51.[3]张宗营,郑干,张紫良.利用 一点一方向 平差方法建立GPS独立控制网的研究及应用[J].矿山测量,2021(4):99-103.[4]陈以军.长大隧道洞外平面控制网测量方法研究及应用[J].铁道勘察,2014(2):11-14.(编辑㊀沈㊀强)Establishment method and application of independent control network for extra-long tunnelin highway location surveyWu Yongxing Jiang Zhiyun Song WeiZhejiang Institute of Communications Co. Ltd. Hangzhou310000 ChinaAbstract The establishment method of independent control network for extra-long tunnel in highway is introduced in this paper in detail.The impact of projection distortion on the accuracy of control point is reduced by changing the central meridian or projection plane.And the one point one direction adjustment method is used to improve the accuracy within the control network.It is analyzed and explained for the practicality and efficiency of the proposed method in combination with the actual project situation.Key words extra-long tunnel independent control network projection distortion one point one direction。
隧道测量中控制网布设与数据处理方法研究

以实现连续观测 。
( 标准差) = +b d‘ 用 √ (x )计算, 式中a固 (
定 误 差 ) mi ~ 1 I I ; ( 例 误 差 ) =5 T lT b 比 I 0 lI = lP P m~2 P d 点间距 ) 0 m; 求使 用 P m; ( ≤2 k 要
仪 器标 释 精 度 应优 于 1 mm 2 Pm。 O 4 P - 3. 2点位 设置 为 满 足 施 工 引 测 进 洞 需 要 , 隧 道 进 在 出 口 各布 设 6 GPS 面 控 制 点 , 图 1 个 平 如 所 示 , 中J 、 2 QL0 QL0 、 图 1J 、 2、 3 QL0 为隧 道进 4
QL 7 隧 道 出 口GPS 制 点 。 有 控 制 点 0为 控 所
时 , 以 实现 l P 可 P m~2 P P m的相 对 精 度 , 定
件 。 不 选 择 G S 法 方 法 建 网 , 管 是平 如 P 方 不 3. 观测 方法 与作 业要 求 3 都 位 精 度 会 随 着 基 线 的 加 长 而 提 高 。一般 测 面控 制 网还 是 高 程 控 制 网 , 将 面 临 测量 采用 GPS 态相 对 定 位进 行 测 量 , 测 静 观 量手 段很 难 达 到 这 样 的 精 度 级 别 。 3 极 大 工作 量 大 , 期长 , () 周 测量 精 度 很 难 达 到 等 问 前 对 接 收 机 进 行 全 面 检 测 , 器 精 度 必 须 仪 地 缩 短 了观 测 时 间 。 完 成 一 条 基 线 的 相 题 , 以 因此 项 目组 决 定 采 用 GPS 网 , 了使 建 为 达 到标 称 精度 的 规 定 。 P 观测 选择 最 佳时 G S 对 定 位 所 需 要 的 观 测 时 间 为 例 , 用 经 典 该特 长 隧 道 实 现 高 精 度 贯 通 , 备 在 洞 外 采 准 段 , 边 和 观 测 条 件 欠 佳 的 点 位 增加 观 测 长 的静 态 定 位 方 法 , 一股 为 l h~3 具 体 时 间 使用 GPS h( 全球 定 位 技 术和 I等水 准 , 而在 洞 时间 。 测要求 及采用主要参数为 。 观 依精 度不 同而 不 同 )( ) 。4 三维 坐 标 能 与 观 测 内使 用 I等 导 线 环 网和 Ⅱ等 水 准 建 立 隧 道 ( ) 边 观 测 时 段 数 ≥2 1周 。 成 果 一 同提 供 , 是 因 为 , 站 点 的 大 地 高 施 工 控 制 网 。 这 测 ( 时 段长 度 : 1 m <S≤2 k 2) 当 k 0 m时 , 为 程 可 以 被G S 确 测定 , P 精 所以 在精 确 提 供 测
特大桥首级控制网布设和测量
摘要特大桥首级控制网分为首级平面控制网和首级高程控制网,对其设计与观测是特大桥工程建设的重要组成部分,在工程建设中具有十分重要的意义。
本文将结合青岛跨海大桥,针对现代特大型桥梁施工建设对控制测量的要求,从桥梁工程的建设出发,对特大桥首级控制网测量技术设计进行详细的论述。
主要分析利用GPS测量技术建立特大桥首级平面控制网和利用精密水准测量技术建立特大桥的首级高程控制网的方法。
按照特大桥首级控制网的测量步骤,系统的阐述了特大桥首级控制网的设计、观测、数据处理的过程,以及在各个步骤中采取的提高精度的措施,通过完成青岛跨海大桥手机控制网的测量技术设计,得出一些对于特大桥首级控制网布设和测量有意义的结论。
关键字:特大桥;首级控制网;技术设计AbstractThe head control network of bridge with long span can be divided into the head horizontal control network and the vertical control network, for its design and survey is an important part of the bridge construction,and the head control network has very important means. Takes the Qingdao Bay Major Bridge as example, this article is for the technical requirement of survey for construction of bridges with long span, and gives a minute description about the technical design of survey of the head control network, which is designed for bridges with long span. The method of how to use GPS to set up the head horizontal control network and how to use precise leveling surveying to build the head vertical control network of bridges with long span is analyzed. According to the steps ofthe survey about the head control network, this paper explains the processes of the design, surveying, data processing and the measures which are adopted to improve the accuracy of the network in a systematic way. By completed the technical design of survey of the head control network about the Qingdao Bay Major Bridge, summarizes same meaningful conclusions for establishing the head control network of all the bridges with long span.Keyword: Bridge with long span; Head control network; Technical design目录目录 (1)1 绪论 (3)1.1 研究的目的与意义 (3)1.2 国内外的研究现状 (4)1.3 本文研究的主要内容 (5)2 工程概况 (6)2.1 测区概况 (6)2.1 工程简介 (6)2.3 主要任务 (7)2.4 作业技术指标 (7)3、首级平面控制网测量技术设计 (8)3.1 作业技术依据 (8)3.2 坐标系统的选择及起算数据 (8)3.3 网形的优化设计 (9)3.4 大桥合龙处平面误差预计 (10)3.5 选点埋石 (16)3.6 外业观测 (18)3.7 数据处理 (22)3.8提交的成果 (26)4首级高程控制网测量技术设计 (27)4.1坐标系统及起算数据 (27)4.2水准路线的选定及精度估算 (27)4.3大桥合龙处高程误差预计 (29)4.4实地选点埋石 (30)4.5外业施测 (32)4.6 数据处理 (36)4.7 应提交的资料 (36)5结论与展望 (37)参考文献 (38)致谢 (39)附录I (39)1 绪论1.1研究的目的与意义桥梁是指供道路、铁路、渠道、管线等跨越水体、山谷或彼此间相互跨越的工程构筑物,是交通运输中的重要组成部分,在国民经济建设与社会发展中占有极其重要的地位。
隧道地下控制测量导线布设形式

隧道的控制测量跟一般的控制测量不同,隧道内没有GPS卫星信号,无法实现高精度的GPS静态控制测量;大部分隧道是随着掘进进行控制测量,随着隧道的掘进,离洞口越远的地方导线点的精度越低,有可能影响到隧道的横向贯通误差。
那隧道内如何布设导线呢?传统做法是在洞内布设边长适当的支导线,布设方案简单,观测工作量较少,布设灵活,但由于没有多余观测和其他约束条件,在实际工作中即使发生错误也无法检查,同时随着导线长度的增加,端点横向误差增大。
为了减小支导线端点误差,常常采用减少导线转折角个数(加大导线边长)或选择若干导线边用陀螺经纬仪测定其方位角的方法,但由于受陀螺经纬仪精度影响,实际作业时一般不采用这种方法。
支导线为了避免上述支导线的缺点,提高导线端点精度,并根据实际施工情况及井下工作条件,一般采用以下几种布设形式。
主辅点菱形导线法celiangyuan在地下控制支导线点(主点)的附近再布设一个导线点(辅点),为了便于同时设置目标和精确量距,考虑两个观测点安装在同一个强制归心观测墩上,边长约为10~15cm,两点之间距离在事先安装好中心螺旋后可用游标卡尺精确测量,由于游标卡尺丈量精度可达±0.2mm,因此可认为主副点间长度值没有误差。
主辅点菱形导线法主辅点四边形导线法celiangyuan在地下控制支导线基础上每4点组成四边形,相邻主辅点采用游标卡尺测量长度。
主辅点四边形导线法环形导线法celiangyuan根据隧道实际情况,布设成环形导线,导线点采用强制归心装置,安装在地下地铁隧道侧壁,保持离开侧壁一段距离,一般约0.5~0.7m,以保证视线离开侧壁约在0.5m以上,减少旁折光的影响,导线所有角度距离采用Ⅰ级全站仪观测。
环形导线法基本双导线celiangyuan通过这种布网方式使两条导线形成公共点或者公共边,构成检核条件。
随导线长度的延伸,两条导线可以在适当的位置再次相交或重合,创造出新的检核条件。
对隧道量测技术与控制的研究
内施工隧道测量 , 一定要保证桩点的稳定性和可靠性, 视野也要宽阔良好 。 水 准点选取点一定要保证牢固不易被损坏的安置点。 为了能得到的测量数据准 3 0 m, 曲线 长度 不要 大 于2 0 m。 穿线 的两穿 线 点距 离应 该 大于 5 m。 ( 4 ) 开 挖前 应 确, 在测量前一定要对测量仪器进行检校( 5 ) 隧道平面测量的精度 、 隧道内两 该 在 开挖 断 面标 出设 计 断面 尺寸 线 , 在 开挖 结 束后 要 及 时绘 制 开挖 面 的断 面 相 向施 工 中线 在 贯通 面 上 的极 限 误 差贯 通 误 差 影 响值 、 洞 内导 线 测角 、 量 距 图 。对 于上 下下 导坑 法施 工 的 隧道 , 上 下 隧道 在延 伸 挖掘 的 过程 中 保持 中心 的精度以及两洞 口水准点间的测量值 , 都要保证符合我 国《 公路隧道勘测规 点对称, 上下挖掘过程应该呼应进行 。( 5 ) 使用经纬仪测定临时 中线点, 间距 程》 的 规定 。 ( 6 ) 隧 道竣 工 时还 要提 交 贯通 误差 的实 测成 果 和 说 明书 , 还有 一 根据 实 际需 求进 行适 当调整 , 但是 一定 要保 证 在 1 0 m 之 内。( 6 ) 洞 内 的水准 线 些 实 测数 据 和相 关示 意 图 。 根 据 洞 口的 高度 再结 合 洞 内的施 工情 况 ,由洞 口高 程控 制 点 向洞 内布设 , 测 点 间的距 离 以2 0 0—5 0 0 m为 最佳 。( 7 ) 衬 砌立 模前 应 复核 中线 和 高程 , 标 出拱 2 作 业程 序 架顶 、 边 墙 底和 起拱 线 高程 , 用 设 计衬 砌 断面 的支 距控 制架 立 拱模 和墙 模 。 立 确保 无误 。( 8 ) 洞 内部 的 水准 路 线 , 要 按 照 已经设 隧道施工量测大体可以分为以下九步: ( 1 ) 熟悉该项 目的施工资料 ; ( 2 ) 选 模 后 必须 进行 检 查和 校正 ,
使用全站仪进行隧道内测量与布线的技巧与方法

使用全站仪进行隧道内测量与布线的技巧与方法隧道是一种具有特殊地下结构的工程,常用于道路、铁路等交通基础设施的建设中。
在隧道的建造过程中,需要进行精确的测量与布线工作,以确保隧道的质量和安全。
全站仪作为现代测量仪器的代表,在隧道内测量与布线中发挥着重要的作用。
本文将介绍使用全站仪进行隧道内测量与布线的一些技巧与方法。
一、前期准备工作在开始隧道内测量与布线之前,必须进行一系列的前期准备工作。
首先是选择合适的全站仪。
隧道内测量与布线通常需要考虑到复杂地形和环境,因此全站仪的性能和功能要能够满足这些要求。
其次是对隧道进行初步的勘测和地形分析,以了解隧道的特点和条件,并为后续的测量和布线提供依据。
二、隧道内测量的技巧与方法1. 全站仪的基本使用全站仪主要用于角度测量和距离测量。
在隧道内测量中,可以通过设置基准点和参照点的方式确定测量的起点和终点,并采集相关的角度和距离数据。
在进行测量时,要注意保持仪器水平和稳定,并确保准确瞄准测量目标。
2. 隧道内坡度的测量隧道内通常存在坡道,特别是在铁路隧道中。
在进行隧道内测量时,必须准确测量隧道的坡度,以确保铁路的正常运行。
可以利用全站仪的水平仪功能进行测量,或者通过设置测量参照点的方式进行测量。
3. 隧道内弯曲段的测量隧道内通常存在弯曲段,需要对其进行精确测量。
可以利用全站仪的角度测量功能,通过测量两个参照点之间的角度来确定弯曲段的形状和角度。
在测量时,应注意保持仪器水平和稳定,并准确瞄准参照点。
4. 隧道内横断面的测量隧道内的横断面是隧道设计和建造的重要参考依据。
利用全站仪的测量功能,可以对隧道内的横断面进行准确测量,并绘制出相应的剖面图。
在进行测量时,应选择合适的测量路线,并进行适当的测量间距,以获得准确的横断面数据。
三、隧道内布线的技巧与方法1. 布置测量控制点在隧道内进行布线工作时,必须先进行控制点的布置。
控制点是测量的基准点,用于确定测量的起点和终点,并提供水平和垂直的参考。
隧道施工控制网布设

2021/10/ 10
9
GPS控制网的精度设计
隧道测量最终的要求是保证相向开挖的隧道正确贯通 , 因此,GPS网的设计也必须满足这一要求。
坑口控制点的精度
按隧道规范规定:当隧道长 L ≤4 km,其横向贯通误 差的限差应 ≤10 cm,即中误差 mσ ≤±5 cm;当隧道长 4~8 km 时,其横向限差应 ≤15 cm, mσ ≤±7. 5 cm; 当 L > 8 km 时,限差还可放宽一些。显然,贯通误差是 由洞外控制测量误差与洞内导线测量误差所引起。因此, 其横向贯通中误差 mσ的计算式为
2021/10/ 10
19
GPS短边方位观测的中误差为
解算得到士0.68″,当然这里只计算了偶然误差的影响, 方位测量的精度中有可能还会受到系统误差的影响,但可 以看出GPS短边方位测量具有很高的精度,可以在隧道测量 中大显身手。
从长梁山铁路隧道GPS网和精密导线网的比较分析中可 以看出,利用GPS布设隧道洞外平面控制网不仅能满足隧道 施工的要求,与常规方法相比具有 1点数少:整个导线网共有38个点,GPS网共23个点; 2工期短,精度高等优点,可大大提高经济和社会效益,可 以认为GPS是布设隧道洞外平面控制的理想方法; 所以,可以认为GPS是布设隧道洞外平面的理想方法。
Q——设计的GPS网的图形强2021/度1100/ ,由网11 的几何形状所决定,或由GPS网矢量的协方差
因此,m0用GPS接收机的标称精度表示,即
为了实现隧道网的布设和精度设计,可以根据 隧道总长度和测区地形及各坑口的初步位置,以不 同边长模拟几种GPS测量网的方案,根据图形和他的 GPS矢量的协方差矩阵解求Q值,并求出坑口控制点 的精度,选择既满足精度又具有高效率的网作为优 化方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
隧道测量中控制网布设与数据处理方法研究摘要:传统隧道施工控制网的方法有三角测量方法和精密导线法,其中三角测量方法是最为传统的隧道施工控制网方法,而精密导线法近几年应用较多。
本文基于笔者多年从事控制测量的相关经验,以GPS应用于某隧道控制网布测为研究背景,分析探讨了洞内外平面控制测量的方法与流程。
关键词:GPS 特长隧道控制网贯通误差
1 基于GPS控制网布设的优点
传统隧道施工控制网的方法有三角测量方法和精密导线法,其中三角测量方法是最为传统的隧道施工控制网方法,而精密导线法近几年应用较多。
常规测量办法在隧道测量中难度都较大,因为其一般都在地形复杂的山区。
而如果选择采用GPS来建立隧道控制网,由于通视条件对GPS观测影响较小,而GPS控制网网形也较常规控制网更为随意,故GPS测量一种有效的控制测量隧道的方法。
GPS如下几个优点在在测量中的应用中较为实用:(1)观测站之间可以相互不通视。
点位选择比传统方法更为灵活,也极大地减少了因为选点的苛刻增加的经费和时间。
(2)有较高的定位精度。
如基线<50km时,可以实现1PPm~2PPm的相对精度,定位精度会随着基线
的加长而提高。
一般测量手段很难达到这样的精度级别。
(3)极大地缩短了观测时间。
以完成一条基线的相对定位所需要的观测时间为例,采用经典的静态定位方法,一般为lh~3h(具体时间依精度不同而不同)。
(4)三维坐标能与观测成果一同提供,这是因为,测站点的大地高程可以被GPS精确测定,所以在精确提供测站点的平面位置的同时,能同时得到大地高程。
这开辟了一条新的途径,即可以研究大地水准面的形状和地面点的高程。
(5)GPS用用简便的操作,较轻的重量,小的体积等特点。
(6)GPS能在所有气候条件下作业。
跟传统的测量方法不同,GPS观测不受地点、时间限制,也不受天气条件影响,可以实现连续观测。
2 工程简介
全长4126m的隧道位于某山脉中段,属于目前我国建成的最长隧道之一。
隧道进口处于直线地段,出口在曲线上,曲线半径为598m,缓和曲线长122m,偏角为31°04′30″。
进口处高程2241m,出口处高程为2836多米,越岭地段牛背梁的高程为3900米,整个测区相对高差近1300多米,山势相对陡峻,地形极其复杂,有着极差的通视条件。
如不选择GPS方法方法建网,不管是平面控制网还是高程控制网,都将面临测量工作量大,周期长,测量精度很难达到等问题,因此项目组决定采用GPS建网,为了使该特长隧道实现高精度贯通,准备在洞外使用GPS全球定位技术和Ⅰ等水准,而在洞内使用Ⅰ等导线环网和Ⅱ等水准建立
隧道施工控制网。
3 洞外平面控制测量
3.1 控制测量的精度
3.2 点位设置
为满足施工引测进洞需要,在隧道进出口各布设6个GPS平面控制点,如图1所示,图中J1、J2、QL02、QL03、QL04为隧道进口GPS 控制点,C1、HY、PD2、QL05、QL06、QL07为隧道出口GPS控制点。
所有控制点均用异步环相联,并组成空间三角形和空间大地四边形以加强GPS网的几何强度。
3.3 观测方法与作业要求
采用GPS静态相对定位进行测量,观测前对接收机进行全面检测,仪器精度必须达到标称精度的规定。
GPS观测选择最佳时段,长边和观测条件欠佳的点位增加观测时间。
观测要求及采用主要参数为。
(1)周边观测时段数≥2。
(2)时段长度:当1km<S≤20km时,为1.5h~2h;当S<1km时,为0.5h~1h。
(3)卫星高度角≥150。
(4)PDOP≤6。
(5)卫星个数≥5。
(6)采样率≥15S。
(7)每颗卫星连续跟踪时间大于15min。
3.4 数据处理
GPS观测数据采用仪器WILD200的随机软件SKI版处理,基线解算时采用下列参数:采用Hopfield作为对流层模型;采用标准模型作为电离层模;采用广播星历作为星历,采用码和相位数据;采用L1+L2频率,使用<20km作为解模糊盾的边长限制,先验中误差控制为±10mm。
利用计算机程序软件计算GPS基线网平差、坐标转换、平面网平差等数据。
采用观测数据资料整理、平差计算均采用两组对算、复核、审核等方式来确保数据无误。
3.5 测量精度
表1列出了平差后各控制点的点位平面坐标误差。
为了进一步验证GPS测量的可靠性,采用全站仪测导线方法,检测
了出口GPS点群所组成的局部小网,两成果相比,X坐标相差为1.5mm,Y坐标相差为1.7mm,水平角相差1.53″,说明数据可靠。
4 洞内平面控制测量
4.1 施测等级的确定
依据《铁路测量技术规则》的规定,17km~20km范围的隧道,其洞内外贯通中误差总和不超过250mm,按照这一规定,洞内可以依据通视情况设点,平均边长设置为500m,洞内外贯通误差按照250mm计算,精度即可满足要求和精度指标进行施测基于二等导线的要求。
另外,项目组经过综合论证,决定洞内导线布设成导线闭合环网,并按一等导线的要求和精度指标进行施测,这一方法确保了横向贯通误差<100mm。
4.2 控制桩点设置
如上所述,等边闭合导线环网作为洞内外平面控制导线。
设置500m作为导线平均边长,一个闭合导线由10条边组成,而设置4个闭合环在出口段。
一条导线设在离洞壁1m~2m的位置,另外一条导线沿隧道中线方向,这样的设置方法,使得沿隧道中线方向的导线可用来放样,且不会破坏导线点。
4.3 贯通误差预计
由式m2洞内=(mβ×L/ρ)2×(n+3)/12其中mβ=0.7″,L=19km,ρ=206265″,n=38,代入上式,得m洞内=±119mm。
根据洞外GPS控制测量成果计算得m外=±45mm,则由:
m2总=m2内+m2外
将m内和m外代入上式,得
m总=±95mm
小于横向贯通中误差值100mm的要求,并远小于《铁路测量技术规则》规定的全隧道横向贯通中误差值250mm的要求。
4.4 数据处理
(1)测站平差,在水平角每测站测完后进行。
(2)检查闭合差粗差,即计算每个闭合环的角度闭合差,检查其中是否存在粗差。
(3)通过加、乘常数改正,气象改正,投影改正,使所有测量边长值归算到隧道统一高程面(976m)。
(4)在计算机上用导线网平差程序完成计算,包括对整个闭合环网进行严密平差计算,从而可计算出每个控制点的坐标值,并进行精度评定。
计算结果表明,洞内导线的测角精度为m=±0.63″。
5 结语
(1)从精度分析来看,可以采用GPSB级网进行隧道平面控制测量,其结果是可靠的,能达到隧道贯通的优点,节约了费用,缩短了测量周期,达到了京都要求。
(2)根据隧道贯通精度要求设计导线测量精度,同时利用等边闭合导线环网来布设隧道内控制测量网。
而且在施测时的控制精度指标不低于设计精度要求,才能达到京都贯穿。
(3)洞内高程控制测量采用的是Ⅱ等标准,结果表明能达到很高的贯通精度,以后长大隧道施工进行洞内高程控制测量可以借鉴该方法。