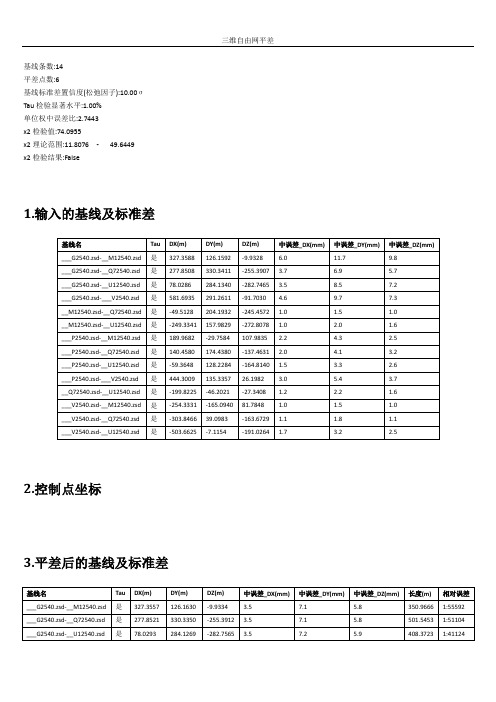
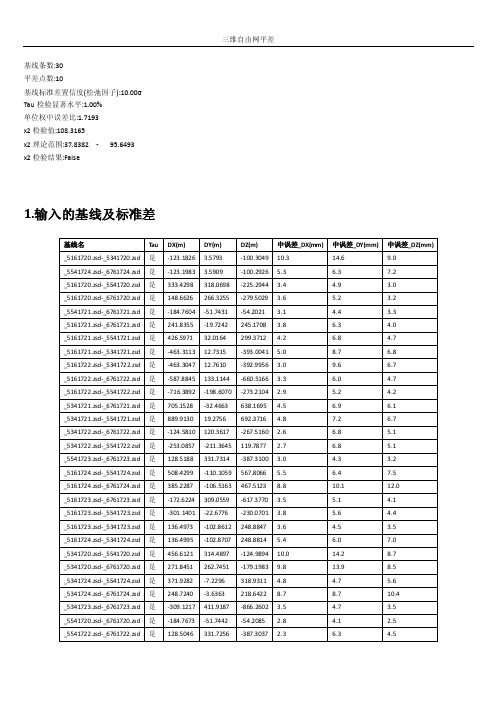
三维自由网平差
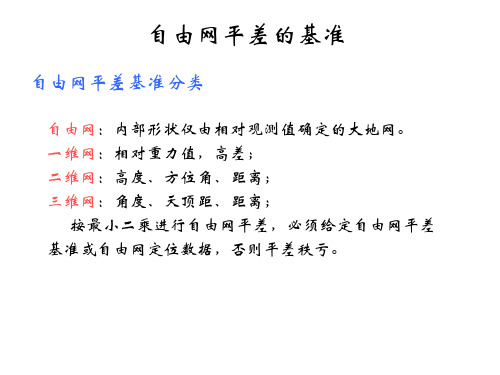
自由网平差

求导
ˆ T P 2 K T N 0 得到 K N 1P X ˆ 2X 1 X1 11 11 X 1 1 ˆ1 x
ˆ T P 2K T N 0 得到 X ˆ Q N K 2X 2 X2 12 2 X 2 21 X 2
于是
1 ˆ ˆ X 2 QX 2 N 21 N11 PX1 X 1
V BT ( BBT ) 1W
BR BT ( BBT ) 1
右逆
第三讲 秩亏平差(Free Net Adjustment)
关于广义逆 2、广义逆(generalized Inverse)
设A是m×n矩阵,秩R(A)=r<=min(m,n), 如果G满足如下方程,
AGA A
定义为A的广义逆,G为n×m矩阵,并记为 A 一般不唯一。
第三讲 秩亏平差(Free Net Adjustment)
一、自由网平差概述
4、秩亏网平差方法分类(根据约束条件)
加权最小二乘最小范数解
V T PV min ˆTP X ˆ min X
X
最小二乘最小范数解
逆稳平差
V T PV min ˆTX ˆ min X
ˆ X ˆ 1 X ˆ X 2 V T PV min ˆ TX ˆ min X 2 2
关于向量范数(Norm of Vector) ——范数是比长度更广泛的概念
设
X ( x1, x2 xn )
1-范数
X xi
i 1
n
X
p
( xi )1/ p
i 1
n
p
p-范数
X
( x x x )
2 1 2 2
三维自由网平差。。
7.2
5.8
6.
站点名
Lat.
Lon.
H(m)
中误差_Lat(mm)
中误差_Lon(mm)
中误差_H(mm)
G
040:37:15.67245N
109:49:46.11362E
1026.7267
0.0
0.0
0.0
M1
040:37:15.26688N
109:49:31.19336E
1026.0589
0.0
___G2540.zsd-__U12540.zsd
是
0.0006
-0.0070
-0.0100
4.5
12.0
10.3
0.0
0.0
0.0
___G2540.zsd-___V2540.zsd
是
-0.0011
0.0115
0.0135
6.7
14.3
10.5
0.0
0.0
0.0
__M12540.zsd-__Q72540.zsd
dVDX(mm))
dVDY(mm)
dVDZ(mm)
___G2540.zsd-__M12540.zsd
是
-0.0031
0.0038
-0.0006
9.4
18.0
15.2
0.0
0.0
0.0
___G2540.zsd-__Q72540.zsd
是
0.0013
-0.0060
-0.0005
5.1
9.1
7.4
0.0
0.0
4131120.0894
3.8
7.7
6.2
Q7
第二章2自由网平差基准
(4‘)
平差前和平差后重心点至各点的边长平方和相等。
经典自由网平差
基准:一个点坐标,一条边方位,一边长,平差前后保持不变,
秩亏网平差中,以(1’)——(4‘)式代替,其中(1’)(2‘)式为网的平移, (3’) 式定向,(4)式边长缩放,
根据重心坐标,为了计算方便,当近似值取定后。可先进行重心化—— 就是把坐标原点移至重心点处。
2. 二维测角网
假设所有点的纵横坐标为未知数,给定网中两个点的坐标为 固定(已知)坐标或一个点的纵横坐标、一条边方位角、一条边的边 长为固定值(已知)。
——这些固定数据构成网的平差基准。
设
GCT Xˆ 0
为基准方程
①当1、2两点已知(固定)坐标,则:
Xˆ 1 Yˆ1 Xˆ 2
0
V3 1
1 1 0
110XXXˆˆˆ132
0 0 6
(2)
X3 X30 设 X3X30Xˆ3
Xˆ3 0
称为基准条件方程
GCT 0 0 1 ,GCTXˆ 0 ,其中 X ˆX ˆ1 X ˆ2 X ˆ3 13
(Yi2Xi2) Si2
H
i1
i1
标准化后G:
1
m
0
0 1
1 m 0
0
....
1
...
GT
Y1
m X1
Y2
m
X2
...
m m m m
X
1
m
Y1 X 2 mm
Y2
...
测绘数据处理自由网平差
的秩R(B)等于未知参数 的个数t.即 (1-7-2)
2020/7/9
2
在最小二乘准则下,得其法方程为
(1-7-3)
其中N= PB,W=
。此时,系数阵N为满秩方阵,即
det(N) ,N为非奇异阵,有唯一解,其解为
(1-7-4)
当平差网没有起算数据时,网中所有的点均为待定点。设未知
方程,从而可以按附有限制条件的间接平差法求解。
等价于约束条件
的限制条件方程为
式中
BG=0
故加权秩亏网平差函数模型为
(1-7-9) (1-7-10)
(1-7-11)
2020/7/9 11
此处的系数矩阵B不是列满矩阵,而是列亏矩阵。 将式(1-7-11)组成法方程,得
(1-7-12)
式中
, 因N为降秩方阵,无正常逆,所以
2020/7/9
5
(2)、秩亏网平差。它是在最小二乘
和最小范数
的条件
下求定未知参数的最佳估值。
(3)、加权秩亏网平差。它是在最小二乘
和加权最
小范数的条件
下求定未知参数的最佳估值。式
中, 为表示未知参数稳定程度的先验权矩阵。
(4)、拟稳平差。若将平差网中的未知参数分为两类,即
(s>d)
(1-7-7)
平均距离)。 对于一维的高程网,这种约束是使平差前后网店的平均高程保持 不变。 这些约束条件我们称之为重心基准条件。
2020/7/9
9
(三)加权秩亏自由网平差基准 和秩亏自由网平差基准类似,但应考虑各网点的权重,采用了带 权重心基准条件。 (四)拟稳平差基准 也和秩亏自由网平差基准类似,但仅仅是采用所有拟稳点的重心 基准条件。
高速铁路CPⅢ三角高程网构网与平差计算方法
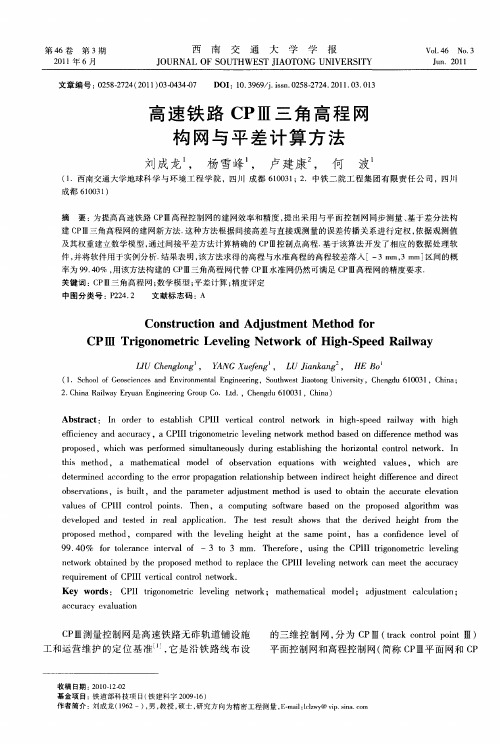
为克 服高 速铁路 C 1控 制 网将平 面 和高 程数 P1 I
据分开测量的不足 , 高高速铁路 C 1控制 网的 提 P1 I 建 网效率 , 保证 达 到高精 度要 求 , 文 在 C I 并 本 PI平 I
平 差计 算原 理 , 建立 了平差计 算 和精度 评定 的数 并
学 模 型 , 后 , 绍 根 据 该 数 学 模 型 开 发 的 实 用 最 介
C 1三角 高程 网平 差计算 软 件. P1 I
间距 约为 l 2 精度 要 求很 高 , 面 网要 求 相 0~ 0m; 平
邻点 的相 对 点 位 中误 差 不 大 于 -1mm , 程 网 4 j高 -
o sna os sb i ,ad teprm t dut e t eh di ue oo ti teacrt e v t n be Tl ,i ul n aa ee ajs n m to s sd t ba h cua l a o tn t h r m n e e i
法, 又有 中国的矩形 法 .
站 到 C Ⅲ点 的水 平方 向值 、 P 斜距 和竖 直 角. 采用 自
由测 站观 测 , 没有 仪 器 对 中的 问题 , 镜 中心就 是 棱 C Ⅲ三维控 制 点 的 点 位 , 有 目标 对 中和 棱 镜 高 P 没 度 问题 . 样 , 据 自由测站 到 C H点 的斜距 和竖 这 根 PI 直角 , 就可 以计算 测 站到 C Ⅲ点 的三角 高差 . P 一个 C 1平 面 网测 站 一般观 测 1 P1 I 2个 C I点 , 个 自 PI 由单 I 由测站观 测值 形 成 的 三 角 高差 情 况 , 图 1 示. 如 所
【精】三维自由网平差(学习资料)
_5341722.zsd-_5541722.zsd 是
_5541723.zsd-_6761723.zsd 是
_5161724.zsd-_5541724.zsd 是
_5161724.zsd-_6761724.zsd 是
_5161723.zsd-_6761723.zsd 是
_5161723.zsd-_5541723.zsd 是
三维自由网平差
4.基线改正数及标准差
基线名
Tau
_5161720.zsd-_5341720.zsd 是 _5541724.zsd-_6761724.zsd 是 _5161720.zsd-_5541720.zsd 是 _5161720.zsd-_6761720.zsd 是 _5541721.zsd-_6761721.zsd 是 _5161721.zsd-_6761721.zsd 是 _5161721.zsd-_5541721.zsd 是 _5161721.zsd-_5341721.zsd 是 _5161722.zsd-_5341722.zsd 是 _5161722.zsd-_6761722.zsd 是 _5161722.zsd-_5541722.zsd 是 _5341721.zsd-_6761721.zsd 是 _5341721.zsd-_5541721.zsd 是 _5341722.zsd-_6761722.zsd 是 _5341722.zsd-_5541722.zsd 是 _5541723.zsd-_6761723.zsd 是 _5161724.zsd-_5541724.zsd 是 _5161724.zsd-_6761724.zsd 是 _5161723.zsd-_6761723.zsd 是 _5161723.zsd-_5541723.zsd 是 _5161723.zsd-_5341723.zsd 是 _5161724.zsd-_5341724.zsd 是 _5341720.zsd-_5541720.zsd 是 _5341720.zsd-_6761720.zsd 是 _5341724.zsd-_5541724.zsd 是 _5341724.zsd-_6761724.zsd 是 _5341723.zsd-_6761723.zsd 是 _5541720.zsd-_6761720.zsd 是 _5541722.zsd-_6761722.zsd 是 _5341723.zsd-_5541723.zsd 是
WGS-84三维无约束平差坐标在GPS测量中的运用

WGS-84平差坐标在GPS测量中的运用韶关市国土资源信息中心郭建华摘要:本文基于GPS相对定位和坐标转换原理,针对GPS测量中的WGS-84与本地坐标系转换参数的选择进行研究,结合实际测量工作,介绍WGS-84平差坐标在实际测量过程运用,提高工作效率的作业方法。
关键词:WGS-84坐标系,网平差,坐标转换,RTKAbstract: Based on GPS relative positioning and coordinate conversion mechanism for GPS measurements in WGS-84 coordinate system with the local transformation parameters of selection, in combination with the actual measurements, introduced Adjustment WGS-84 coordinates the use of the actual measurement process, improve efficient way of operating.Key words: WGS-84 coordinate system, network adjustment, coordinate transformation,RTK1.引言全球定位系统(GPS)技术的出现,以其高精度、全天候、低成本、高效率等特点被广泛应用到测绘及其他领域,大大的提高了测绘工作的效率,减轻了测绘工作者的外业劳动强度。
由于GPS系统是一个全球性的定位和导航系统,其坐标也是全球性的。
目前GPS测量所使用的协议地球坐标系成果WGS-84世界大地坐标系(World Geodetic System),所有的GPS测量成果都是基于WGS-84坐标系的,包括单点定位的坐标以及相对定位中解算的基线向量。
测绘数据处理-自由网平差
4
d就是网中必要的起算数据个数。且有:
二、秩亏自由网平差思路 为了求得未知参数的唯一确定解,除了遵循最小二乘准则外 ,还必须增加新的约束条件,从而达到求得唯一解的目的 。由于约束条件不同,秩亏自由网平差可分为如下几种情 况: (1)、经典自由网平差。它是在假设网中有d个必要起算数据 的条件下,求定未知参数的最佳估计。这种方法早就已为 人们所熟知。不难理解,该法的平差结果(未知参数X的 解及其协因数阵 )将随着假设的d个必要起算数据的不同 而不同,即随着已知点位置的改变而改变。
第七行划去,剩下的6三行u列的阵即为三维测边网平差时的附
加阵。 很明显,上述的附加阵G均未标准化,即只是满足了BG=0, 但尚未满足的条件。
2019/2/15
17
阵标准化
1、用原始阵 2、设 和 阵,求出相应的阵 ; 相应 中第i行主对角元素为gii,把原始阵
的第i行数据均乘以
即可得到标准化阵的相应数据;
2019/2/15
2
在最小二乘准则下,得其法方程为 (1-7-3) 其中N= PB,W= 。此时,系数阵N为满秩方阵,即 (1-7-4) 当平差网没有起算数据时,网中所有的点均为待定点。设未知 参数的个数为u,误差方程为 (1-7-5) 组成的法方程为
2019/2/15
det(N)
,N为非奇异阵,有唯一解,其解为
2019/2/15
26
点号
P1 P2 P3 P4
/m
2019/2/15
27
(1)计算网的重心点坐标
(2)计算以加权重心点坐标为坐标原点的各待定点的坐标值
点号
P1 P2 P3
/km
P4
2019/2/15
南方数据处理软件操作流程
图1 新建工程
4
南方数据处理软件操作流程
(2)增加野外观测数据
在菜单栏单击“数据输入”下的“增加观测数据文件”,如 图2所示。选择路径中选中存放GPS外业数据文件的文件夹,然后 在文件列表中选中所需要的数据文件,再点击确定即可完成观测 数据录入。
图2 增加野外观测数据
5
南方数据处理软件操作流程
(3)GPS基线处理
11
南方数据处理软件操作流程
12
图5 处理合格的网形图
南方数据处理软件操作流程
(4)对整网进行约束平差
① 数据录入:输入已知点坐标,给定约束条件。 ② 平差处理:进行整网无约束平差和已知点联合平差。根据以下 步骤依次处理。 a. 自动处理:基线处理完后点此菜单,软件将会自动选择合格基线 组网,进行环闭合差。 本次数据环闭合差报告中:闭合环最大节点数为3,闭合环总数为 23,同步环总数为10,异步环总数为13, 超限闭合环数为0,闭合 差最大值为0.0582,闭合差最小值为 0.0016,相对 闭合差最大值为 3.01ppm,相对闭合差最小值为0.13ppm。
10
南方数据处理软件操作流程
b. 点击基线列表,查看基线解算残差,将残差偏大的卫星进 行屏蔽后再解算此基线。 c. 双击当前基线调节天线截止角和历元间隔,再点击解算, 方差比大于3即为合格,但在调整的过程中,可能会出现很多的 组合方案和以之相对应的方差比,一般来说方差比越大,解算 效果越好。同时,在顾及方差比的同时,也要考虑图3中的X、 Y、Z增量的大小,顾忌二者,选取最优化的结果。 d. 当操作以上几步都不合格,要么删除禁用此不合格基线, 或重测。
8
南方数据处理软件操作流程
9
图4 删除周跳
南方数据处理软件操作流程
自由网平差
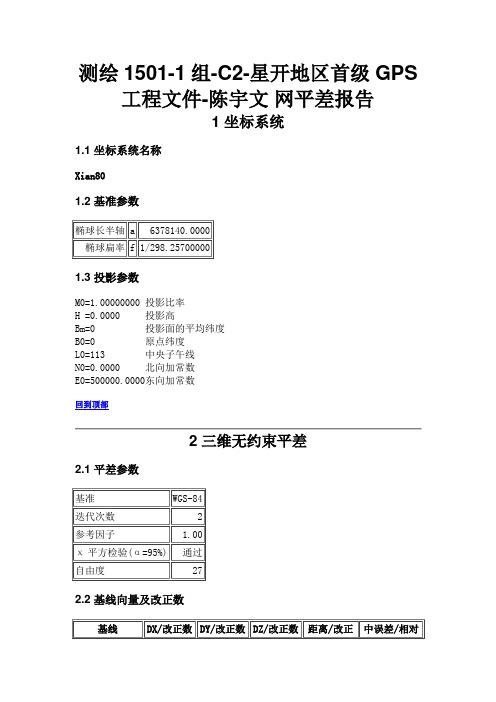
L0
=
113
中央子午线
N0
=
0.0000
北向加常数
E0
=
500000.0000
东向加常数
回到顶部
2三维无约束平差
2.1平差参数
基准
WGS-84
迭代次数
2
参考因子
1.00
χ平方检验(α=95%)
通过
自由度
27
2.2基线向量及改正数
基线
起点->终点.时段
DX/改正数
(m)
DY/改正数
(m)
DZ/改正数
DY04->HG67.328K
0.4721
0.0277
0.2793
DY04->HG67.328L
0.1347
0.4665
0.3476
DY04->HG67.328M
0.3580
0.7991
0.3396
EY02->G021.331K
0.0693
0.0920
0.1366
EY02->HG67.328K
0.4309
-0.0003
0.0024
0.0007
-0.0003
1: 394858
DY04->HG67.328K
-1964.3727
-700.9887
-188.7706
2094.2253
0.0032
0.0038
0.0003
-0.0033
-0.0034
1: 647896
DY04->HG67.328L
-1964.3727
-700.9887
-188.7706
第8章自由网平差
2、秩亏自由网平差 如果不设起始已知高程, 设网中全部待定点为参数, 则误差方程为:
ˆ1 l1 v1 1 0 1 x v 1 1 0 x l ˆ 2 2 2 ˆ3 v3 0 1 1 x l3
自由网: 当控制网中仅没有必要的起算数据时,通常称为自由网。 附合网: 当控制网中除必要起算数据时外,还有多余的起算数据 的网,称为附合网。 自由网平差方法分为: 经典自由网平差和秩亏自由网平差两种。
一些特殊用途的控制网,如变形观测网、沉降监测网等, 一般为自由网。
1、经典自由网平差
例:
选定x3的高程为已知,则可列出误差方程为:
v1 1 0 l1 ˆ1 v 1 1 x l 2 2 x ˆ2 v3 0 1 l3
法方程:
ˆ1 l1 l2 2 1 x 0 1 2 x ˆ2 l2 l3
ˆ X 1 t11 B2 f ˆ n1 nt1 X 2 t2 1
2、拟稳平差附加基准条件
ˆ 0 GT Px X 0 0 t1t1 T T 其中:Px , G G1 0 I du dt1 t t 2 2 则基准约束条件变为: ˆ 0 GT X
系数阵的行列式不为零,即R(N)=2,非奇异, 方程有唯一解:
ˆ1 2 1 l1 l2 x x ˆ2 1 2 l2 l3
经典平差法的条件:
是在控制网中必需设定(或已有)足够的坐标起算数据;
如果“设定”的坐标起算数据等于必要起始数据,则称为经 典自由网平差。
三维网平差报告

三维网平差报告------------------------------------------------------------------------------------------------5工区补点三维网平差结果多余观测数= 21已知点数= 1总点数= 6GPS三维基线向量数= 12中央子午线= 130.060000000(dms)椭球长轴= 6378137.000(m)椭球扁率分母= 298.257222101PVV= 6.710(cm^2)M0= 0.565(cm)------------------------------------------------------------------------------------------------已知坐标(X,Y,Z)------------------------------------------------------------------------------------------------No. Name X(m) Y(m) Z(m) ------------------------------------------------------------------------------------------------1 JM7502 -3022547.3902 3569324.58014322111.9137------------------------------------------------------------------------------------------------GPS三维基线向量观测值------------------------------------------------------------------------------------------------No. From To VectorDX(m) VectorDY(m) VectorDZ(m)Distance(m)------------------------------------------------------------------------------------------------1 7502-1 CPI1056-1 2038.562 1702.605 -39.682 2656.3462 7502-1 CPI1057 2376.071 1245.982 589.003 2746.8363 7502-1 JM7502 -36.516 409.893 -460.395 617.5034 7502-1 JM7502 -36.515 409.889 -460.398 617.5015 CPI1057 CPI1056-1 -337.514 456.627 -628.677 847.1476 CPI1060 7502-1 3045.463 2109.894 500.908 3738.6377 CPI1060 JM7502 3008.944 2519.792 40.518 3924.8878 CPI1061 7502-1 3801.960 1883.411 1259.490 4425.8859 CPI1061 CPI1060 756.505 -226.492 758.568 1095.00010 CPI1061 JM7502 3765.457 2293.287 799.075 4480.66411 JM7502 CPI1056-1 2075.089 1292.701 420.701 2480.73812 JM7502 CPI1057 2412.588 836.092 1049.399 2760.592------------------------------------------------------------------------------------------------平差后坐标(X,Y,Z)------------------------------------------------------------------------------------------------No. Name X(m) Y(m) Z(m) Mx(cm) My(cm) Mz(cm) Mp(cm) ------------------------------------------------------------------------------------------------1 JM7502 -3022547.3902 3569324.5801 4322111.91372 7502-1 -3022510.8729 3568914.6867 4322572.3076 0.17 0.23 0.26 0.383 CPI1056-1 -3020472.3060 3570617.2861 4322532.6209 0.21 0.25 0.30 0.444 CPI1057 -3020134.7999 3570160.6680 4323161.3085 0.24 0.29 0.33 0.505 CPI1060 -3025556.3356 3566804.7921 4322071.3985 0.21 0.30 0.34 0.506 CPI1061 -3026312.8407 3567031.2838 4321312.8291 0.27 0.36 0.41 0.61------------------------------------------------------------------------------------------------最弱点------------------------------------------------------------------------------------------------No. Name MX(cm) MY(cm) MZ(cm) MP(cm)------------------------------------------------------------------------------------------------6 CPI1061 0.27 0.36 0.41 0.61------------------------------------------------------------------------------------------------三维基线向量残差------------------------------------------------------------------------------------------------No. From To V_DX(cm) V_DY(cm)V_DZ(cm) 限差(cm)------------------------------------------------------------------------------------------------1 7502-1 CPI1056-1 0.51 -0.54 -0.481.70 合格2 7502-1 CPI1057 0.21 -0.10 -0.24 1.71 合格3 7502-1 JM7502 -0.11 -0.00 0.10 1.51 合格4 7502-1 JM7502 -0.25 0.49 0.38 1.51 合格5 CPI1057 CPI1056-1 0.78 -0.92 -1.08 1.52 合格6 CPI1060 7502-1 -0.03 0.02 0.16 1.87 合格7 CPI1060 JM7502 0.14 -0.43 -0.29 1.91 合格8 CPI1061 7502-1 0.75 -0.81 -1.14 2.00 合格9 CPI1061 CPI1060 -0.03 0.04 0.10 1.54 合格10 CPI1061 JM7502 -0.66 0.90 0.98 2.01 合格11 JM7502 CPI1056-1 -0.49 0.47 0.59 1.67 合格12 JM7502 CPI1057 0.27 -0.38 -0.40 1.71 合格------------------------------------------------------------------------------------------------三维基线向量可靠性------------------------------------------------------------------------------------------------No. From To 内部可靠性DX DY DZ------------------------------------------------------------------------------------------------2 7502-1 CPI1057 0.92 0.53 0.613 7502-1 JM7502 1.05 0.60 0.484 7502-1 JM7502 0.33 0.96 0.975 CPI1057 CPI1056-1 0.47 0.67 0.366 CPI1060 7502-1 0.38 0.53 0.497 CPI1060 JM7502 0.28 0.96 0.748 CPI1061 7502-1 0.99 0.49 0.609 CPI1061 CPI1060 0.13 0.03 0.4510 CPI1061 JM7502 0.87 0.86 0.5811 JM7502 CPI1056-1 0.45 0.17 0.6212 JM7502 CPI1057 0.49 0.49 0.48累计内部可靠性 7.00 7.00 7.00平均内部可靠性 0.58 0.58 0.58内部可靠性总和 21.00内部可靠性均值 0.58------------------------------------------------------------------------------------------------平差后边长及精度------------------------------------------------------------------------------------------------No. FROM TO S(m) MS(cm) MS:S ppm------------------------------------------------------------------------------------------------1 7502-1 CPI1056-1 2656.346 0.061/4327000 0.231/4157000 0.243 7502-1 JM7502 617.502 0.061/981000 1.024 7502-1 JM7502 617.502 0.061/981000 1.025 CPI1057 CPI1056-1 847.147 0.061/1339000 0.756 CPI1060 7502-1 3738.637 0.061/6340000 0.167 CPI1060 JM7502 3924.885 0.071/5751000 0.178 CPI1061 7502-1 4425.884 0.061/7099000 0.149 CPI1061 CPI1060 1095.000 0.061/1876000 0.5310 CPI1061 JM7502 4480.665 0.071/6665000 0.1511 JM7502 CPI1056-1 2480.737 0.051/4562000 0.2212 JM7502 CPI1057 2760.591 0.061/4417000 0.23------------------------------------------------------------------------------------------------最弱边------------------------------------------------------------------------------------------------No. FROM TO S(m) MS(cm) MS:S ppm------------------------------------------------------------------------------------------------3 7502-1 JM7502 617.502 0.061/981000 1.02------------------------------------------------------------------------------------------------大地坐标, 二维平面投影坐标, 误差椭圆参数------------------------------------------------------------------------------------------------中央子午线= 130.060000000(dms)x坐标常数= 0.0000(m)y坐标常数= 500000.0000(m)------------------------------------------------------------------------------------------------No. Name B(dms) dB(cm) L(dms) dL(cm)H(m) dH(cm)x(m) dx(cm) y(m) dy(cm)E(cm) F(cm)T(dms)------------------------------------------------------------------------------------------------1 JM7502 42.555708940 0.00 130.152999300 0.00140.000 0.004755236.091 0.00 512924.614 0.000.00 0.00 0.00002 7502-1 42.561543736 0.05 130.154044641 0.05 207.320 0.374755802.737 0.05 513160.560 0.050.06 0.04 51.33423 CPI1056-1 42.561488115 0.05 130.134330747 0.06 167.507 0.434755780.995 0.05 510504.675 0.060.06 0.05 47.04354 CPI1057 42.564230278 0.06 130.134494945 0.06 181.026 0.494756627.250 0.06 510540.605 0.060.06 0.06 135.35305 CPI1060 42.555561641 0.06 130.182306932 0.07 129.379 0.494755199.145 0.06 516849.239 0.070.08 0.05 52.04126 CPI1061 42.552300452 0.06 130.184204717 0.07 97.541 0.604754193.853 0.06 517282.098 0.070.08 0.06 52.4539------------------------------------------------------------------------------------------------。
改进的全站仪三维网整体平差的应用研究

改进的全站仪三维网整体平差的应用研究王卫勇;侯凯;王蕾【摘要】提出和完善全站仪控制网三维整体平差的函数模型,在传统三维平差模型基础上,提出以新的生成观测值建立的改进的三维平差观测条件方程,并在Visual C ++平台上进行了改进的全站仪三维整体平差程序实现,最终,利用全站仪三维观测数据,进行三维整体平差计算的验证和分析,结合GPS三维坐标值进行对比分析,得出一系列有意义的结论。
%The paper has introduced the studying and improving the functional model of 3-D adjustment in the large-scale control network,and having the observation conditional equation of the modified 3-D adjustment with the formation observations,then to complete it in Visual C++ language.At last,it's feasible and meaningful through verifying and analyzing the 3-D adjustment with total-station's observations and comparing with the 3-D coordinates of GPS.【期刊名称】《城市勘测》【年(卷),期】2011(000)006【总页数】4页(P115-118)【关键词】三维平差;平差模型;定权;全站仪【作者】王卫勇;侯凯;王蕾【作者单位】郑州市规划勘测设计研究院,河南郑州450052;郑州市规划勘测设计研究院,河南郑州450052;郑州市规划勘测设计研究院,河南郑州450052【正文语种】中文【中图分类】P207.21 引言随着科技的发展以及大型工程项目的要求,采用三维定位方法可以有效加快施工进度,本文以全站仪三维观测数据:斜距、水平角和天顶距为研究对象,进行了空间三维整体平差模型的研究。
精密工程控制网测量复测成果报告

1.测区和控制网介绍东北东部铁路通道大连铁路枢纽改造工程精密工程控制测量网(以下简称“大连铁路枢纽改造工程精测网”)的平面控制网分级布设为:“基础控制网(CPI)和线路控制网(CPII)”。
大连铁路枢纽改造工程精测网的高程控制网为二、三等水准网。
本标段为大连铁路枢纽改造工程SN2标段,起讫里程DK36+985~DK66+500正线长度29.515km.大连铁路枢纽改造工程位于辽东半岛、黄海之滨,线路总体走向呈西南~东北向,西起大连市甘井子区,东至普兰店市的登沙河镇西侧,途经大连市的金州区与保税区。
SN2标段线路自DK36+985开始,以二十里铺隧道下钻既有哈大线,于刘半沟附近设置广宁寺站,随后铁路继续东行跨过丹大高速公路、登沙河,在登沙河镇西侧到达本标段工程设计终点DK66+500,线路全长29.515km,其中DK36+985至DK39+600、DK61+700至DK66+500段在金州区,DK39+600至DK61+700段在保税区。
本标段范围内精测网复测涉及CPI控制点23个;包含与大连铁路枢纽改造工程SN1标段的2个CPI共用桩点(CPI5044、CPI5043A)和与登庄铁路1标段搭接处的2个CPI 共用桩点(CPI5023、CPI5024), CPI控制网复测前首先进行了现场勘查,检查标石的完好性。
经现场勘查CPI5043、CPI5042、CPI5041、CPI5032、CPI5019、CPI5027六个CPI 控制点被破坏,重新埋设点号为CPII5043A、CPI5042A、CPI5041A、CPI5032A、CPI5019A、CPI5027A,其余的17个控制点桩位标石均保存完好。
本标段范围内精测网复测涉及 CPII 控制点23个,经现场勘查CPII6127、CPII6129、CPII6132、CPII6135和CPII6146五个CPII控制点被破坏,重新埋设点号为CPII6127A、CPII6129A、CPII6132A、CPII6135A和CPII6146A。
GNSS静态数据处理原则

中海达静态数据处理软件HGO基线处理技巧1、基线清理数据量大的时候,基线解算比较耗时。
GPS观测接收机数量较多时,会因为自然同步产生许多长基线,即许多相距较远的点连接而成的基线。
这些长基线往往同步观测时间不长,属于不必要的基线,对于控制网质量也无多大益处,所以为了节省计算时间,应在基线解算前将其清理删除。
删除时可在图上选择,也可以在基线表中根据距离选择删除。
2、处理超限闭合环基线解算完成后,首先要检查环闭合差(同步或异步环),对于闭合差大的环,应该进行处理。
闭合环超限处理是一项繁琐、耗时的工作,也是GPS控制网数据处理的主要内容。
主要的技巧和方法可以归纳为:(1)、基线解算的精度指标rms和ratio是基线解算质量的参考指标,前者是中误差,后者是方差比(ratio=〖rms〗_max/〖rms〗_min),rms越小,表明基线解算质量越高,ratio越大,表明整周未知数解算越可靠,所以重解基线,要关注这两项指标,但是这两项指标只作参考,最重要的指标还是闭合差。
(2)、超限基线处理过程中一些基线要重新解算,解算后会影响到相关环闭合差,所以处理需要反复进行。
作为一般的原则,首先处理相对闭合差较大的环,然后处理环闭合差较小的环。
(3)、整理归纳超限闭合环,分析是否涉及到一条共同基线,例如几组超限闭合环(J012,J015,J016)、(J013,J015,J102)、…,(J012,J020,J015)就涉及到共同基线J012→J015,这条基线有问题的可能性就较大。
(4)、处理时首先分析可能有问题的基线是否必要,如果是连接两个不相邻的点,并且涉及到环甚多,则可以直接将其删除。
(5)、如果一个闭合差超限的环,相关基线均不能简单删除(删除后影响图形结构,减少了重要环路),应该改变基线解算参数,重新计算相关基线。
方法是在选中重解基线,更改高度截止角,采样间隔,历元间隔、等设置,保存至选中基线,重新解算。
(6)、如果反复修改设置重解基线后,仍不能减小环闭合差,则可将闭合差超限环中的基线,分别与周边的基线组成闭合环,检查其闭合差。
清华三维智能图文平差2000详细使用说明

第三章 TOPADJ 工作台 ............................................................................22 3.1 在线帮助和总说明 ....................................................................................... 22
1.2 TOPADJ 新版的特征 .................................................................................... 10
1.3 使用 TOPADJ 工作台 .................................................................................. 11
公司的主要业务范围包括:测绘/地理信息采集设备、计算机与专业应 用软件系统的开发/销售、以及相关的技术咨询和服务。目前主要产品分为 软、硬件两大类,有公司自己开发研制的 Cito 和 SV 系列测绘成图软件、TOP 系列测绘软件(平差及通讯等)、水利断面软件、道路测设一体化系统软件、 地下管线测绘及管理软件、建筑物沉降分析软件、掌上测图系统、数字水准 软件、数字矿山测绘系统以及房产测量师软件;另外我公司还承接 GIS 工程, 已经推出并得到成熟应用的 GIS 系统有:房产测绘信息管理系统、矿产资源 管理信息系统、银行营业网点管理系统、通用测绘信息化管理系统、地下管 网信息管理系统等;配套的硬件产品有全站仪、GPS、绘图仪、扫描仪等。
2002 年,威远图公司入住中关村德胜科技园区,同时获得北京市西城 区政府下属隆达集团风险注资,被北京市认证为高新技术企业以及软件企 业、获得北京市规划委员会颁发的测绘软件及地理信息系统开发的乙级资 质,同年与美国知名企业 Autodesk 公司携手,作为 Autodesk GIS 产品中国 测绘行业总代理,成为测绘行业唯一的一家 ADN 全球开发联盟成员。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-89.6246
5.7
-4.0822
12.5
-33.1963
6.8
95.6621
1:6243
13352053.zsd-M0802053.zsd
是
-145.2212
4.1
119.1974
9.3
-213.6536
5.2
284.5085
1:24912
13352053.zsd-PH112053.zsd
是
-146.0687
1.2
G0942061.zsd-G0962061.zsd
是
-313.6976
2.2
475.3519
5.2
-831.7136
2.5
G0942061.zsd-G0972061.zsd
是
-1065.2041
1.6
828.7204
2.9
-1679.5809
1.4
G0942054.zsd-PH012054.zsd
4.5
-106.2664
7.2
95.5338
3.9
179.2138
1:19251
G0902047.zsd-PH072047.zsd
是
-14.3616
6.1
-313.5600
9.2
454.2334
5.2
552.1360
1:45342
G0902047.zsd-PH092045.zsd
是
165.5603
7.5
是
-683.2046
4.0
-970.6648
10.1
1109.9307
5.1
G0962061.zsd-G0972061.zsd
是
-751.4952
2.6
353.3467
4.4
-847.8787
2.4
M0802052.zsd-PH082052.zsd
是
-64.3035
1.3
298.8735
2.7
-491.4100
4.9
426.2111
8.2
-743.7010
4.6
892.0712
1:84274
G0902046.zsd-PH062043.zsd
是
-108.1426
4.5
-106.2973
7.2
95.5095
3.9
179.2094
1:19251
G0902047.zsd-PH062044.zsd
是
-108.1589
5.1
-33.3712
8.1
116.7616
5.1
PH072051.zsd-PH102051.zsd
是
-18.5715
2.3
-183.0210
3.7
255.3470
2.5
PH082051.zsd-PH092051.zsd
是
328.4639
3.6
23.5632
6.2
119.1941
3.5
PH082051.zsd-PH102051.zsd
5.5
73.6518
12.3
-112.8807
6.4
146.1211
1:9819
G0902046.zsd-G0922044.zsd
是
-74.5172
5.1
446.8873
9.0
-684.1125
5.4
820.5309
1:70494
G0902046.zsd-PH052046.zsd
是
-247.0708
4.0
69.5493
9.1
-146.0803
5.2
217.9739
1:19372
13362053.zsd-M0802053.zsd
是
-55.5711
5.6
123.2765
12.5
-180.4726
6.4
225.5119
1:14939
13362053.zsd-PH112053.zsd
是
-56.4335
475.3369
8.1
-831.7204
3.9
1008.0213
1:102308
G0942061.zsd-G0972061.zsd
是
-1065.2066
4.1
828.7223
7.5
-1679.5794
3.7
2154.6305
1:230684
G0942054.zsd-PH012054.zsd
是
-320.7017
DY(m)
中误差(mm)
DZ(m)
中误差(mm)
13352053.zsd-13362053.zsd
是
-89.6298
2.4
-4.0868
5.0
-33.1946
2.8
13352053.zsd-M0802053.zsd
是
-145.2199
1.7
119.1967
3.8
-213.6560
2.2
13352053.zsd-PH112053.zsd
是
-33.6493
2.1
-553.1536
3.5
779.6544
2.8
G0942054.zsd-G0952054.zsd
是
216.5048
2.1
296.4369
3.7
-343.7541
1.7
G0942061.zsd-G0952061.zsd
是
216.4979
1.3
296.4334
2.6
-343.7551
58.8828
5.8
-133.4124
4.3
288.7384
1:36772
G0922043.zsd-PH052045.zsd
是
-172.5578
2.9
-20.6609
5.5
-59.5923
3.9
183.7235
1:25173
G0922044.zsd-PH052046.zsd
是
-172.5805
2.9
2.8
PH072051.zsd-PH082051.zsd
是
-148.5240
2.1
-56.9450
3.4
-2.4434
2.3
PH072047.zsd-PH092045.zsd
是
179.9278
4.5
-33.3818
5.9
116.7579
3.0
PH072051.zsd-PH092051.zsd
是
179.9302
1.2
58.8776
2.4
-133.4171
2.0
G0922043.zsd-PH052045.zsd
是
-172.5649
2.3
-20.6542
4.4
-59.5776
3.2
G0922044.zsd-PH052046.zsd
是
-172.5763
1.4
-20.6473
3.3
-59.5598
2.3
G0922044.zsd-PH062043.zsd
1.0
G0952061.zsd-G0972061.zsd
是
-1281.7008
1.6
532.2847
2.8
-1335.8272
1.4
G0952054.zsd-PH012054.zsd
是
-537.2014
3.0
-880.8909
5.1
1095.9025
2.5
G0952054.zsd-PH022054.zsd
3.7
-89.9022
5.8
98.1594
3.4
PH032043.zsd-PH052045.zsd
是
-154.7011
2.1
-169.4247
3.0
172.0201
1.6
PH042042.zsd-PH052045.zsd
是
76.6303
1.0
-79.5183
1.7
73.8603
1.1
PH052046.zsd-PH062043.zsd
3.0
G0902046.zsd-G0922044.zsd
是
-74.5122
2.8
446.8819
5.5
-684.1185
3.2
G0902046.zsd-PH052046.zsd
是
-247.0750
3.1
426.2200
6.2
-743.6942
3.2
G0902046.zsd-PH062043.zsd
是
2.9
G0902047.zsd-PH092045.zsd
是
165.5663
4.3
-346.9398
6.0
570.9936
3.2
G0922043.zsd-PH032043.zsd
是
-17.8537
3.4
148.7664
3.7
-231.5886
2.8
G0922043.zsd-PH042042.zsd
是
-249.2045
是
-320.7001
3.0
-584.4497
4.7
752.1512
2.2
G0942054.zsd-PH022054.zsd