【CN109955252A】一种智能可控式机器人操控系统【专利】
一种机器人控制系统[发明专利]
![一种机器人控制系统[发明专利]](https://img.taocdn.com/s3/m/1794053533d4b14e84246801.png)
专利名称:一种机器人控制系统专利类型:发明专利
发明人:师阳,顾子明,李智明
申请号:CN202011071950.5申请日:20201009
公开号:CN112223287A
公开日:
20210115
专利内容由知识产权出版社提供
摘要:本发明公开了一种机器人控制系统,用于接收指令信息的指令接收单元,所述指令接收单元连接有用于储存指令信息的指令储存单元,所述指令储存单元连接有用于对指令信息进行处理的处理主机,所述处理主机连接有用于对主机内部热量进行监控的主机热量监控单元,所述主机热量监控单元连接有用于对处理主机进行散热的散热单元,所述处理主机连接有用于对发出的指令进行执行的指令响应单元;由主机热量监控单元对主机进行实时监控,并控制散热单元对处理主机硬件进行散热;使得机器人在尘土较多的环境中能够保持良好散热性能的情况下又不易受尘土影响,使得机器人能够在接收指令信息后稳定高效运行。
申请人:江苏工程职业技术学院
地址:226000 江苏省南通市青年中路87号
国籍:CN
代理机构:南通毅帆知识产权代理事务所(普通合伙)
代理人:任毅
更多信息请下载全文后查看。
一种智能机器人控制系统[实用新型专利]
![一种智能机器人控制系统[实用新型专利]](https://img.taocdn.com/s3/m/879442f6b7360b4c2f3f644e.png)
专利名称:一种智能机器人控制系统专利类型:实用新型专利
发明人:宋小波
申请号:CN201921879190.3
申请日:20191104
公开号:CN211388804U
公开日:
20200901
专利内容由知识产权出版社提供
摘要:本实用新型涉及智能控制领域,具体涉及一种智能机器人控制系统,包括:机器人本体框架,以及由一控制模块控制的语音交互装置和/或部位驱动装置;其中所述部位驱动装置位于该机器人本体框架上;所述语音交互装置适于采集并识别用户的语音指令,并发送至所述控制模块;所述控制模块适于对语音指令进行处理,并生成答复指令发送至语音交互装置,和/或生成机器人本体框架各部位的动作指令发送至部位驱动装置;本实用新型的智能机器人控制系统通过语音交互装置、人脸跟踪识别模块实现与用户的人机互动,提高用户的娱乐体验。
申请人:卓谨信息科技(常州)有限公司
地址:213000 江苏省常州市新北区太湖东路9号305室
国籍:CN
代理机构:常州市权航专利代理有限公司
代理人:赵慧
更多信息请下载全文后查看。
一种消防机器人远程控制系统[发明专利]
![一种消防机器人远程控制系统[发明专利]](https://img.taocdn.com/s3/m/a814fb11182e453610661ed9ad51f01dc2815736.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910925430.7(22)申请日 2019.09.27(71)申请人 安徽延达智能科技有限公司地址 230088 安徽省合肥市蜀山区习友路3333号中国(合肥)国际智能语音产业园研发中心楼611-62室(72)发明人 郭延达 (74)专利代理机构 南京中高专利代理有限公司32333代理人 袁兴隆(51)Int.Cl.G05B 19/042(2006.01)G01D 21/02(2006.01)(54)发明名称一种消防机器人远程控制系统(57)摘要本发明公开了一种消防机器人远程控制系统,包括机器人硬件模块、第一通信模块、第二通信模块和远程控制终端,所述机器人硬件模块包括ARM系统、驱动模块、监测模块和电池组,所述ARM系统的信号输出端与所述驱动模块的信号输入端电连接;机器人硬件模块中的监测模块通过第二通信模块与远程控制终端建立连接,使远程控制终端通过无线传输单元和无线通信单元控制消防机器人进行移动等操作,其中,监测模块对所处环境中采集的视频、温度和气体成分信息由DSP模块进行转化,再由传输速率较高的UWB通信单元对信息进行高速传输,使消防机器人对所处环境的视频、温度和气体成分信息可以及时的反馈至远程控制终端。
权利要求书1页 说明书3页 附图1页CN 110824978 A 2020.02.21C N 110824978A1.一种消防机器人远程控制系统,包括机器人硬件模块、第一通信模块、第二通信模块和远程控制终端,其特征在于:所述机器人硬件模块包括ARM系统、驱动模块、监测模块和电池组,所述ARM系统的信号输出端与所述驱动模块的信号输入端电连接,所述ARM系统的信号输出端与所述监测模块的信号输入端电连接,所述电池组的电性输出端通过导线分别与所述ARM系统、所述驱动模块和所述监测模块的电性输入端电连接,所述第一通信模块包括无线传输单元和无线通信单元,所述无线传输单元的信号输入端与所述ARM系统的信号输出端相互电连接,所述无线传输单元的信号输出端与所述无线通信单元的信号输入端相互电连接,所述无线通信单元的信号输出端与所述远程控制终端的信号输入端相互电连接,所述第二通信模块包括DSP模块和UWB通信单元,所述DSP的信号输入端与所述监测模块的信号输出端相互电连接,所述DSP的信号输出端与所述UWB通信单元的信号输入端相互电连接,所述UWB通信单元的信号输出端与所述远程控制终端的信号输入端相互电连接,所述远程控制终端包括MCU、储存器、数据处理单元和控制指令发生模块。
一种机器人控制器[实用新型专利]
![一种机器人控制器[实用新型专利]](https://img.taocdn.com/s3/m/b7fa7dcd4b35eefdc9d33311.png)
专利名称:一种机器人控制器
专利类型:实用新型专利
发明人:张如意,鲁大岱,蔡龙海,张强,吴自翔,于振中,李文兴申请号:CN201920779145.4
申请日:20190528
公开号:CN209590612U
公开日:
20191105
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种机器人控制器,包括处理器单元、电源监控单元、急停处理单元、电源输出单元、电源单元、开机单元、温度监控单元以及IO处理单元处理器单元分别与温度监控单元、IO处理单元、急停处理单元以及电源监控单元连接,电源输出单元与急停处理单元连接,电源单元分别与开机单元以及电源输出单元连接,处理器单元通过EtherCAT/CAN/RS485接口单元与本体/伺服驱动器连接,IO处理单元内部集成AI处理模块、AO处理模块、DI处理模块以及DO处理模块。
本实用新型优点在于:满足工业机器人使用,同时也能满足协作机器人使用的优点,通用性强。
申请人:哈工大机器人(合肥)国际创新研究院
地址:236000 安徽省合肥市经济技术开发区翠微路6号海恒大厦6012室
国籍:CN
代理机构:合肥市浩智运专利代理事务所(普通合伙)
代理人:丁瑞瑞
更多信息请下载全文后查看。
【CN109746941A】一种机器人智能控温防护系统【专利】

一种机器人控制系统[发明专利]
![一种机器人控制系统[发明专利]](https://img.taocdn.com/s3/m/65ca850d0812a21614791711cc7931b765ce7bb3.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910748507.8(22)申请日 2019.08.14(71)申请人 纳博特南京科技有限公司地址 210000 江苏省南京市江北新区惠达路6号北斗大厦5楼501室(72)发明人 张晓龙 甘亚光 (74)专利代理机构 南京瑞华腾知识产权代理事务所(普通合伙) 32368代理人 梁金娟(51)Int.Cl.B25J 9/16(2006.01)(54)发明名称一种机器人控制系统(57)摘要本发明公开了一种机器人控制系统。
该系统包括计算机,用于生成并呈现虚拟机器人的界面,并根据虚拟机器人的姿态生成姿态数据;控制终端,用于向计算机输入控制指令;机器人,包括第二通信模块、主控单元和执行机构,第二通信模块用于接收姿态数据,主控单元用于根据该姿态数据控制执行机构动作,使得机器人与虚拟机器人的姿态同步。
本发明通过计算机生成并呈现虚拟机器人,通过控制终端进行控制虚拟机器人,以虚拟机器人的姿态数据作为机器人的控制指令,使得机器人与虚拟机器人的姿态保持一致;并通采集过机器人环境图像数据,将虚拟机器人呈现在机器人的环境中,进而便于操作和控制,使用极为方便。
权利要求书1页 说明书3页 附图1页CN 110394803 A 2019.11.01C N 110394803A1.一种机器人控制系统,其特征在于,包括计算机,用于生成并呈现虚拟机器人的界面,并根据虚拟机器人的姿态生成姿态数据;控制终端,与计算机连接,用于向计算机输入控制指令,以改变虚拟机器人的姿态;第一通信模块,与计算机连接,用于将虚拟机器人的姿态数据向外发送;机器人,包括第二通信模块、主控单元和执行机构,所述第二通信模块用于接收第一通信模块发出的姿态数据,所述主控单元用于根据该姿态数据控制执行机构动作,使得机器人与虚拟机器人的姿态同步。
2.根据权利要求1所述的机器人控制系统,其特征在于,所述机器人还包括若干摄像头,以采集机器人周围环境图像数据,所述主控单元控制第二通信模块将机器人周围环境图像数据向外发送;所述第一通信模块将机器人周围的图像数据接收并转发给计算机,所述计算机将虚拟机器人生成并呈现在机器人周围环境中。
【CN109917710A】一种教育机器人的控制系统【专利】
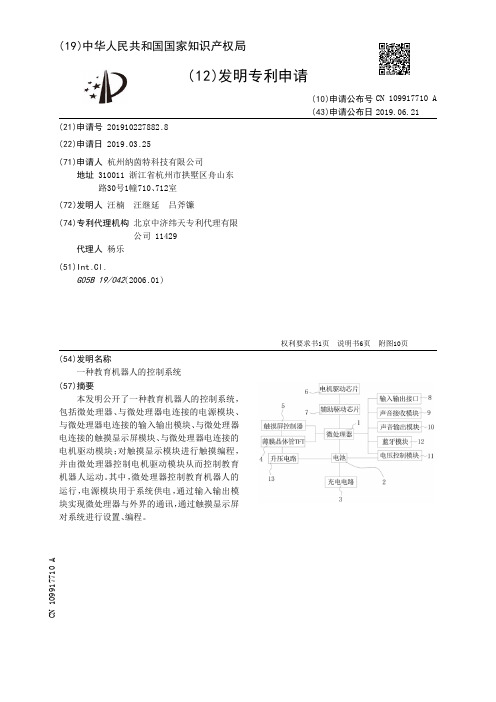
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910227882.8(22)申请日 2019.03.25(71)申请人 杭州纳茵特科技有限公司地址 310011 浙江省杭州市拱墅区舟山东路30号1幢710、712室(72)发明人 汪楠 汪继延 吕斧镰 (74)专利代理机构 北京中济纬天专利代理有限公司 11429代理人 杨乐(51)Int.Cl.G05B 19/042(2006.01)(54)发明名称一种教育机器人的控制系统(57)摘要本发明公开了一种教育机器人的控制系统,包括微处理器、与微处理器电连接的电源模块、与微处理器电连接的输入输出模块、与微处理器电连接的触摸显示屏模块、与微处理器电连接的电机驱动模块;对触摸显示模块进行触摸编程,并由微处理器控制电机驱动模块从而控制教育机器人运动。
其中,微处理器控制教育机器人的运行,电源模块用于系统供电,通过输入输出模块实现微处理器与外界的通讯,通过触摸显示屏对系统进行设置、编程。
权利要求书1页 说明书6页 附图10页CN 109917710 A 2019.06.21C N 109917710A权 利 要 求 书1/1页CN 109917710 A1.一种教育机器人的控制系统,其特征在于:包括微处理器(1)、与微处理器(1)电连接的电源模块、与微处理器(1)电连接的输入输出模块、与微处理器(1)电连接的触摸显示屏模块、与微处理器(1)电连接的电机驱动模块(6);对触摸显示模块进行触摸编程,并由微处理器(1)控制电机驱动模块(6)从而控制教育机器人运动。
2.根据权利要求1所述的一种教育机器人的控制系统,其特征在于:电源模块包括与微处理器(1)电连接的电池(2)、与电池(2)电连接的充电电路(3)。
3.根据权利要求2所述的一种教育机器人的控制系统,其特征在于:充电电路(3)包括与电池(2)电连接的充电芯片,充电芯片连接有用于指示充电状态的指示灯。
一种机器人移动控制的方法、系统及设备[发明专利]
![一种机器人移动控制的方法、系统及设备[发明专利]](https://img.taocdn.com/s3/m/958c5c23bb4cf7ec4bfed0a2.png)
专利名称:一种机器人移动控制的方法、系统及设备专利类型:发明专利
发明人:章晓芳,陈松,吴金金
申请号:CN201811391335.5
申请日:20181121
公开号:CN109514553A
公开日:
20190326
专利内容由知识产权出版社提供
摘要:本申请公开了一种机器人移动控制的方法,包括:建立基于线性动态跳帧的深度双Q网络模型;接收输入的初始参数值及环境信息;利用评估网络模型在初始状态下执行初始策略计算动作集合中每个动作的Q值,并根据各Q值来确定对应动作的跳帧率;根据目标网络模型计算环境信息的目标值;根据目标值确定最优策略,并令机器人执行最优策略进行移动。
本申请所提供的技术方案,根据网络输出动作Q值的大小来线性地决定每个动作的跳帧率,在不增加网络计算量的前提下,高效准确地计算出了每个动作需要重复执行的次数,提高了机器人移动的运算速度及场景识别准确度。
本申请还提供了一种机器人移动控制的系统、设备及计算机可读存储介质,具有上述有益效果。
申请人:苏州大学
地址:215137 江苏省苏州市相城区济学路8号
国籍:CN
代理机构:北京集佳知识产权代理有限公司
代理人:罗满
更多信息请下载全文后查看。
机器人控制器[发明专利]
![机器人控制器[发明专利]](https://img.taocdn.com/s3/m/573ca5c9fbb069dc5022aaea998fcc22bcd143d7.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201880014049.9(22)申请日 2018.02.26(30)优先权数据2017-035039 2017.02.27 JP(85)PCT国际申请进入国家阶段日2019.08.26(86)PCT国际申请的申请数据PCT/JP2018/007049 2018.02.26(87)PCT国际申请的公布数据WO2018/155693 JA 2018.08.30(71)申请人 川崎重工业株式会社地址 日本兵库县神户市(72)发明人 田头毅 (74)专利代理机构 上海瀚桥专利代理事务所(普通合伙) 31261代理人 曹芳玲(51)Int.Cl.B25J 13/06(2006.01)B25J 19/00(2006.01)H05K 7/20(2006.01)(54)发明名称机器人控制器(57)摘要机器人控制器(10)是对机器人的马达进行控制的控制器;具备:容纳产生热的发热部件的筐体(20);在所述筐体(20)的壁上开口的通气孔;在所述筐体内将经由所述通气孔导入的空气送向所述发热部件的风扇;以及能被覆所述通气孔的盖部件(56)。
权利要求书1页 说明书8页 附图6页CN 110325332 A 2019.10.11C N 110325332A1.一种机器人控制器,其特征在于,是对机器人的马达进行控制的控制器;具备:容纳产生热的发热部件的筐体;在所述筐体的壁上开口的通气孔;在所述筐体内将经由所述通气孔导入的空气向所述发热部件输送的风扇;以及能被覆所述通气孔的盖部件。
2.根据权利要求1所述的机器人控制器,其特征在于,所述壁为第一壁;所述风扇为第一风扇;固定有所述发热部件的所述筐体的第二壁由热导率高的材料形成;还具备:覆盖所述第二壁,具有开口部的罩;以及与所述开口部相向配置,并经由所述开口部向所述罩内输送空气的第二风扇。
移动机器人系统和对其进行遥控的方法

移动机器人系统和对其进行遥控的方法专利名称:移动机器人系统和对其进行遥控的方法技术领域:本发明涉及一种移动机器人,具体涉及一种移动机器人系统和对其进行遥控的方法。
背景技术:通常,移动机器人是一种可以自动行走执行给定任务的机器人。
移动机器人的示例包括清洁机器人、监控机器人等等。
近来,在这样的移动机器人中,清洁机器人渐受欢迎。
这样的移动机器人典型的功能是自动执行期望工作,如清洁、监控等等。
用户可使用移动机器人身体上提供的控制面板或遥控器,对机器人进行控制。
然而,仅当用户在移动机器人附近时,才能实现通过控制面板或遥控对这样的移动机器人的控制。
因此,需要提供一种远程可控移动机器人系统,即使用户不在机器人附近,也可实现对移动机器人的控制。
发明内容因此,本发明用于解决上述问题,本发明的目的之一是,提供一种移动机器人系统,其中的移动机器人实质上在所有地方都可遥控,以及一种对它进行遥控的方法。
为了实现这一目的,本发明的第一方面提供一种移动机器人系统,包括移动机器人;配置用于放置移动机器人的家庭站;在家庭站提供的呼叫连接单元,配置用于接收呼叫;呼叫信号转换单元,配置用于将呼叫转换为控制信号,并将控制信号发送至移动机器人。
其中,移动机器人系统还包括用于从移动机器人发送任务完成信号的机器人侧信号传输装置;用于在家庭站接收任务完成信号的家庭侧信号接收装置。
此时,期望的是,所述呼叫包括双音多频(DTMF)信号,并且至少一个双音多频信号对应要由移动机器人执行的任务。
此外,呼叫信号转换单元配置用于使用红外线或射频信号,发送控制信号。
呼叫连接单元可设为在接收到标识信号之后接收呼叫。
此外,呼叫连接单元可配置用于在接收传输完成信号之后,生成呼叫。
另外,家庭站还包括用于供水给移动机器人的供水单元,家庭站具有连接至电话线的电话。
本发明的另一方面提供了一种遥控移动机器人的方法,包括发送指示任务的呼叫信号;将呼叫信号转换为控制信号;将控制信号发送至移动机器人;由移动机器人基于控制信号来执行任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910235866.3
(22)申请日 2019.03.27
(71)申请人 益倍嘉机器人(上海)有限公司
地址 200335 上海市长宁区广顺路33号8幢
3层3119室
(72)发明人 邱忆洋
(74)专利代理机构 上海宏京知识产权代理事务
所(普通合伙) 31297
代理人 崔巍
(51)Int.Cl.
B25J 9/16(2006.01)
B25J 13/00(2006.01)
(54)发明名称
一种智能可控式机器人操控系统
(57)摘要
本发明公开了一种智能可控式机器人操控
系统,其包括机器人本体,所述机器人本体通过
驱动控制线材连接电控设备,所述电控设备上设
置有若干数据接口,所述数据接口通过以太网数
据总线分别连接有物联网通讯设备、后端控制设
备、人机交互设备、外围设备控制装置、工业交换
机、视觉设备。
本发明机器人控制系统使用广泛
性高,信号转化角度高,控制精确度高,使用便
捷,便于异常排查,
维护便捷。
权利要求书1页 说明书3页 附图1页CN 109955252 A 2019.07.02
C N 109955252
A
权 利 要 求 书1/1页CN 109955252 A
1.一种智能可控式机器人操控系统,其包括机器人本体,其特征在于:所述机器人本体通过驱动控制线材连接电控设备,所述电控设备上设置有若干数据接口,所述数据接口通过以太网数据总线分别连接有物联网通讯设备、后端控制设备、人机交互设备、外围设备控制装置、工业交换机、视觉设备。
2.根据权利要求1所述的一种智能可控式机器人操控系统,其特征在于:所述电控设备上连接有示教器。
3.根据权利要求1所述的一种智能可控式机器人操控系统,其特征在于:所述驱动控制线材包括有线材保护管,所述线材保护管内分布有伺服电机线与编码器用线,所述伺服电机线与编码器用线之间设置有屏蔽隔断,所述线材保护管外围包裹有阻燃隔膜。
4.根据权利要求1所述的一种智能可控式机器人操控系统,其特征在于:所述电控设备为驱动控制一体式电控箱,其包括有电控箱本体,所述电控箱本体上设置有若干数据接口,所述电控箱本体内设置有控制主板,所述数据接口与控制主板相连,所述控制主板上设置有若干接插槽,所述接插槽上设置有X轴控制模块、Y轴控制模块、Z轴控制模块、自检模块、告警模块、数据处理模块、外接存储模块。
5.根据权利要求1所述的一种智能可控式机器人操控系统,其特征在于:所述物联网通讯设备包括有设备本体,所述设备本体内设置有数据传输处理组件,所述数据传输处理组件上连接有无线数据通讯模块、4G/5G通讯模块,所述设备本体上设置有接插定位组件。
6.根据权利要求1所述的一种智能可控式机器人操控系统,其特征在于:所述后端控制设备为数据采集与监视控制服务器。
7.根据权利要求1所述的一种智能可控式机器人操控系统,其特征在于:所述人机交互设备包括有键盘、鼠标、显示器和/或触摸屏。
8.根据权利要求1所述的一种智能可控式机器人操控系统,其特征在于:所述外围设备控制装置为现场总线控制装置,包括有装置本体,所述装置本体上设置有若干互为独立的输入模块与输出模块。
9.根据权利要求1所述的一种智能可控式机器人操控系统,其特征在于:所述视觉设备为工业摄像头。
2。